Professor: Eng° Civil Diego Medeiros Weber.
Define-se Momento como a tendência de
uma força F fazer girar um corpo rígido em torno
de um eixo fixo. O Momento depende do módulo de
F e da distância de F em ao eixo fixo.
MECÂNICA APLICADA À ENGENHARIA
Define-se o momento escalar do vetor F em
relação a 0, como sendo:
M=
F×d
onde:
M0= Momento escalar do vetor F em relação ao ponto 0
0 = Pólo ou centro de momento
d= Distância perpendicular de 0 à linha de ação de F, também
chamada de braço de alavanca.
MECÂNICA APLICADA À ENGENHARIA
O momento M0 é sempre perpendicular ao
plano que contém o ponto 0. O sentido de M0 é
definido pelo sentido de rotação imposto pelo vetor
F.
Convenciona-se momento positivo se a força F
tender a girar o corpo no sentido anti-horário e
negativo, se tender a girar o corpo no sentido
horário.
MECÂNICA APLICADA À ENGENHARIA
No SI, onde a força é expressa em Newton (N) e a
distância em metros (m). Portanto, o momento é
expresso em Newton × metros (N × m).
MECÂNICA APLICADA À ENGENHARIA
Regra da mão
Direita:
MECÂNICA APLICADA À ENGENHARIA
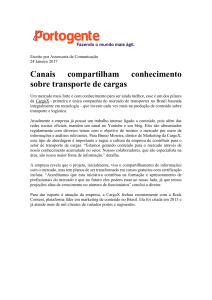
Determine os momentos da força de 800N em relação aos pontos A, B,
C e D.
MECÂNICA APLICADA À ENGENHARIA
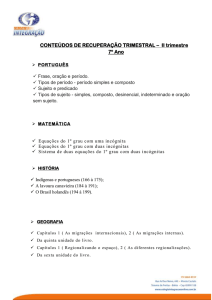
Qual deve ser o valor da força aplicada à barra homogênea de peso 20 N
e comprimento 2,0 m da figura, de modo a mantê-la na horizontal,
quando apoiada no suporte A?
MECÂNICA APLICADA À ENGENHARIA
Um corpo rígido está em equilíbrio quando todas as forças
externas que atuam sobre ele formam um sistema de forças
equivalente a zero, isto é, quando todas as forças externas
podem ser reduzidas a uma força nula e a um binário nulo.
ΣF = 0
ΣM = 0
As expressões acima definem as equações fundamentais de
Estática.
MECÂNICA APLICADA À ENGENHARIA
Decompondo cada força e cada momento em suas
componentes cartesianas, encontram-se as condições
necessárias e suficientes para o equilíbrio de um corpo
rígido no espaço:
MECÂNICA APLICADA À ENGENHARIA
Equilíbrio em duas dimensões:
Para cada uma das forças aplicadas ao corpo rígido, então as
seis equações de equilíbrio no espaço reduzem-se a:
MECÂNICA APLICADA À ENGENHARIA
Para o estudo do equilíbrio dos corpos rígidos não bastam
conhecer somente as forças externas que agem sobre ele,
mas também é necessário conhecer como este corpo rígido
está apoiado.
Apoios ou vínculos são elementos que restringem os
movimentos das estruturas, cada movimento é chamado de
Grau de Liberdade .
Os apoios ou vínculos recebem a seguinte classificação:
MECÂNICA APLICADA À ENGENHARIA
MECÂNICA APLICADA À ENGENHARIA
MECÂNICA APLICADA À ENGENHARIA
MECÂNICA APLICADA À ENGENHARIA
As estruturas são classificadas em função do número de
reações de apoio ou vínculos que possuem. Cada reação constitui
uma incógnita a ser determinada.
Para as estruturas planas, a Estática fornece três
equações Fundamentais:
MECÂNICA APLICADA À ENGENHARIA
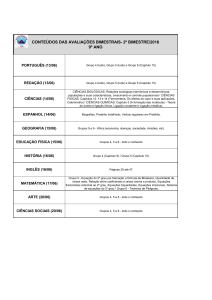
Estruturas hipostáticas são aquelas cujo número de reações de apoio ou
vínculos é inferior ao número de equações fornecidas pelas condições de equilíbrio
da Estática, ou seja ela possui algum grau de liberdade que não foi
restringido.
A figura abaixo ilustra um tipo de estrutura hipostática. As incógnitas são
duas: RA e RB. Esta estrutura não possui restrição a movimentos horizontais.
MECÂNICA APLICADA À ENGENHARIA
Estruturas isostáticas são aquelas cujo número de reações de apoio ou
vínculos é igual ao número de equações fornecidas pelas condições de equilíbrio
da Estática, ou seja, ela possui restrição a todos os graus de liberdade.
No exemplo da estrutura da figura, as incógnitas são três: RA, RB e HA.
Esta estrutura está fixa; suas incógnitas podem ser resolvidas somente pelas
equações fundamentais da Estática.
MECÂNICA APLICADA À ENGENHARIA
Estruturas hiperestáticas são aquelas cujo número de reações de apoio ou
vínculos é superior ao número de equações fornecidas pelas condições de
equilíbrio da Estática.
Um tipo de estrutura hiperestática está ilustrado abaixo. As incógnitas são
quatro: RA, RB, HA e MA. As equações fundamentais da Estática não são
suficientes para resolver as equações de equilíbrio. São necessárias outras
condições relativas ao comportamento da estrutura, como, por exemplo, a sua
deformabilidade para determinar todas as incógnitas.
MECÂNICA APLICADA À ENGENHARIA
O grau de hiperasticidade é igual ao número de ligações que podem ser
supridas de forma a que a estrutura se torne isostática.
MECÂNICA APLICADA À ENGENHARIA
1) Vigas – são elementos estruturais geralmente compostos por
barras de eixos retilíneos que estão contidas no plano em que é
aplicado o carregamento.
MECÂNICA APLICADA À ENGENHARIA
2) Pórticos – são elementos compostos por barras de eixos
retilíneos dispostas em mais de uma direção submetidos a cargas
contidas no seu plano. Apresentam apenas três esforços internos:
normal, cortante, momento fletor.
MECÂNICA APLICADA À ENGENHARIA
3) Treliças – são sistemas reticulados cujas barras têm todas as
extremidades rotuladas (as barras podem girar independentemente
das ligações) e cujas cargas são aplicadas em seus nós. Apresentam
apenas esforços internos axiais.
MECÂNICA APLICADA À ENGENHARIA
4) Grelhas – são estruturas planas com cargas na direção
perpendicular ao plano, incluindo momentos em torno de eixos do
plano. Apresentam três esforços internos: esforço cortante,
momento fletor, momento torsor.
MECÂNICA APLICADA À ENGENHARIA
1) Cargas concentradas – são uma forma aproximada de tratar
cargas distribuídas segundo áreas muito reduzidas (em presença das
dimensões da estrutura). São representadas por cargas aplicadas
pontualmente;
MECÂNICA APLICADA À ENGENHARIA
2) Cargas distribuídas – são cargas distribuídas continuamente. Os
tipos mais usuais são as cargas uniformemente distribuídas e as
cargas triangulares (casos de empuxos de terra ou água)
MECÂNICA APLICADA À ENGENHARIA
3) Cargas-momento – são cargas do tipo momento fletor (ou torsor)
aplicadas em um ponto qualquer da estrutura.
MECÂNICA APLICADA À ENGENHARIA