ELETRÔNICA
INDUSTRIAL
II
Parte 1
Introdução
Conversores CA / CC
Os conversores CA-CC são amplamente utilizados, devido à necessidade freqüente de se obter
tensões contínuas, a partir de tensões senoidais de entrada. Neste caso são muito comuns circuitos
reguladores com transistores operando na região linear. À medida que a potência do conversor
cresce, este tipo de projeto torna-se inconveniente, pois os dispositivos semicondutores tipo
transistores, quando operam na região linear, apresentam maiores perdas de energia, por dissipação
de calor. O uso de técnicas de chaveamento apresenta melhorias na eficiência do conversor uma vez
que os dispositivos s semicondutores quando funcionam no modo chaveado, ou seja, corte e
saturação, apresentando menores perdas do que quando atuam na região linear.
De modo geral, um conversor eletrônico de potência é composto de um estágio de potência
conectado a um estágio com circuitos eletrônicos que realiza a função de controle. O estágio de
controle gera os pulsos para condução e corte das chaves semicondutoras de potência que podem ser
transistores, bipolares, mosfets e IGBT’s (Insulated Gate Bipolar Transistor) ou tiristores, tais como
SCR(Silicon Controled Rectifier).
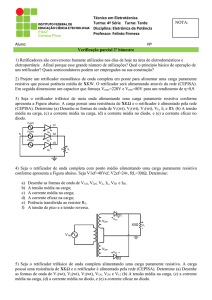
Retificador Monofásico de Meia Onda a Diodo
Retificador monofásico de meia onda alimentando carga resistiva.
Para o exemplo em análise, retificador monofásico de meia onda com carga puramente resistiva, a
corrente que circula pelo diodo possui a forma apresentada na figura a seguir:
1
O diodo encontra-se bloqueado (não conduz) durante o semi-ciclo negativo da tensão alternada de
alimentação v(wt). Desse modo, somente os semi-ciclos positivos são aplicados à resistência de
carga R.
O valor médio da tensão na carga é dado por:
2 ×V
Vo =
2×π
Retificador monofásico de meia onda alimentando carga R-L.
As formas de onda relativas à carga R-L estão representadas na figura a seguir:
Devido a presença da indutância, o diodo não se bloqueia quando ωt=π. O bloqueio ocorre no
ângulo β (ângulo de extinção), que é superior a π. Enquanto a corrente de carga não se anula, o
2
diodo se mantém em condução e a tensão de carga, para ângulos superiores a π, torna-se
instantaneamente negativa.
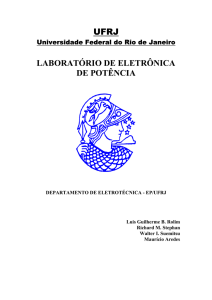
Retificador Monofásico de Onda Completa com Ponto Médio
A estrutura do retificador monofásico de onda completa a diodo com ponto médio está
representada na figura a seguir:
Retificador monofásico de onda completa a diodo com ponto médio.
Etapas de funcionamento.
Durante o semiciclo positivo da tensão da rede (v), o diodo D1 conduz e D2 se mantém bloqueado.
Durante o semiciclo negativo da tensão da rede, D1 bloqueia e D2 conduz a corrente de carga.
As formas de onda correspondentes:
3
O valor médio da tensão na carga é dado por:
2 ×V
Vo =
π
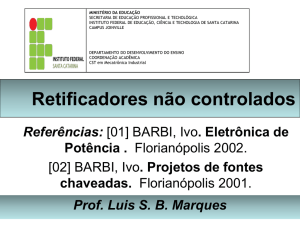
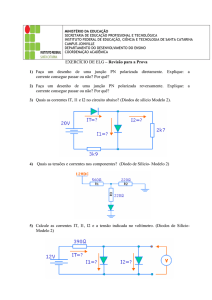
Retificador Monofásico de Onda Completa em Ponte
A estrutura do retificador monofásico de onda completa em ponte, alimentando carga resistiva, é
apresentada na figura a seguir:
Retificador monofásico em ponte a diodos.
Etapas de funcionamento.
Durante a primeira etapa de funcionamento, a tensão de alimentação é positiva. Os diodos D1 e
D4 são polarizados diretamente e conduzem a corrente de carga. Os diodos D2 e D3 encontram-se
polarizados reversamente e permanecem bloqueados.
4
Durante a segunda etapa de funcionamento, os diodos D1 e D4 ficam bloqueados, enquanto D2 e
D3 conduzem a corrente de carga.
As formas de onda correspondentes:
O valor médio da tensão na carga é dado por:
2 ×V
Vo =
π
Percebe-se que a tensão média para ponto médio e configuração em ponte são as mesmas.
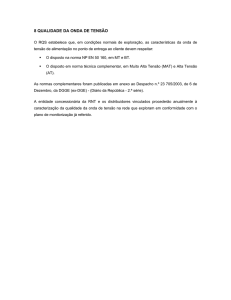
Retificador Trifásico com Ponto Médio
A estrutura apresentada na figura a seguir pode se considerada uma associação de três
retificadores monofásicos de meia onda. Cada diodo é associado a uma das fases de rede de
alimentação. Nesse tipo de retificador é indispensável o emprego do neutro do sistema de
alimentação.
5
Retificador trifásico com ponto médio.
As formas de onda representativas do comportamento da estrutura alimentando uma carga
resistiva estão representadas na figura a seguir. Cada diodo do retificador conduz durante um
intervalo de tempo que corresponde a 120 graus elétricos da tensão da rede.
O valor médio da tensão na carga é dado por:
3 × 3 × 2 ×V
Vo =
2×π
Retificador Trifásico de Onda Completa
A ponte de Graetz, uma das estruturas mais empregadas industrialmente, encontra-se representada
na figura a seguir:
6
Ponte trifásica completa a diodos - Ponte de Graetz.
Para efeito de estudo, a ponte de Graetz pode ser considerada como uma associação série de dois
retificadores trifásicos de ponto médio.
Formas de onda:
7
Observando a figura anterior, podemos estabelecer as seguintes conclusões iniciais a respeito da
figura.
• Cada diodo conduz durante um intervalo igual a 120o;
• Existem sempre dois diodos em condução, um no grupo positivo e outro no grupo negativo do
conversor;
• Ocorre uma comutação a cada 60o;
• A freqüência da componente fundamental da tensão é igual a 6 vezes a freqüência
das tensões de alimentação.
O valor médio da tensão na carga é dado por:
3 × 2 ×V
Vo =
π
Retificador Monofásico Controlado de Meia Onda
O circuito e as formas de onda do retificador monofásico de meia onda a tiristor estão
representados na figura seguinte:
Circuito para o Retificador monofásico de meia onda a tiristor.
Principais Formas de onda.
No intervalo (0,α), o tiristor encontra-se bloqueado. A tensão de carga é nula.
No instante ωt=α, o tiristor é disparado, por ação da corrente de gatilho (gate) ig. Assim, no
intervalo (α,π), a tensão de carga é igual à tensão da fonte.
8
No instante ωt=π a corrente através do tiristor torna-se nula e o tiristor é então bloqueado.
No intervalo (π,2π), a tensão da fonte torna-se negativa e o tiristor se mantém bloqueado.
Portanto, durante este intervalo, a tensão e corrente de carga permanecem nulas.
O valor médio da tensão na carga é dado por:
2 ×V
Vo =
× (1 + cos α )
2×π
Retificador monofásico Controlado de meia onda alimentando carga R-L.
Retificador de meia onda a tiristor alimentando carga R-L.
Principais formas de onda.
Neste caso, o ângulo de extinção da corrente através do tiristor é igual a β, maior que π. Desta
forma, enquanto a corrente através do tiristor (idêntica à corrente de carga) não se anula, a tensão de
carga se mantém igual à da fonte.
Observa-se neste caso que, sendo o ângulo de extinção β maior que π, a tensão de carga assume
valores negativos. Como conseqüência, o valor médio da tensão na carga se reduzirá, em relação
àquele para carga puramente resistiva.
9
Retificador Monofásico Controlado de Onda Completa
A estrutura do retificador monofásico em ponte completa está representada na figura a seguir:
Retificador monofásico em ponte completa a tiristores.
Retificadores controlados em ponte mista.
A estrutura de onda completa com ponto médio está representada na figura a seguir. Para o
funcionamento desta estrutura exige-se a presença de um transformador.
Retificador monofásico de onda completa, com ponto médio, a tiristores.
Todas as estruturas monofásicas de onda completa apresentadas comportam-se do mesmo modo
quando alimentam uma carga resistiva. As principais formas de onda estão representadas na figura a
seguir.
10
Formas de onda para carga resistiva, dos retificadores mostrados nas figuras anteriores.
O valor médio da tensão na carga é dado por:
2 ×V
Vo =
× (1 + cos α )
π
Comportamento para Carga Indutiva
Formas de onda para cargas R-L.
Retificador Trifásico Controlado com Ponto Médio a Tiristor
A estrutura do retificador trifásico como ponto médio a tiristor está representada na figura a
seguir:
Retificador trifásico controlado de ponto médio.
11
De acordo com a figura seguinte, na qual é representada a tensão de carga. Observar que para a
estrutura trifásica, o ângulo de disparo é nulo quando duas ondas de tensão se interceptam e não
quando a tensão passa por zero, como é o caso das estruturas monofásicas.
Tensão na carga para α = 30o
Tensão na carga para α = 0o
Tensão na carga para α = 60o, para o retificador de ponto médio.
O valor médio da tensão na carga é dado por:
3 × 3 × 2 ×V
Vo =
× cos α
2×π
12
Comportamento com Carga Indutiva
O valor médio da tensão na carga é dado por:
3 × 3 × 2 ×V
Vo =
× cos α
2×π
Retificador Trifásico Controlado Configuração em Ponte a Tiristor
A ponte de Graetz ou retificador trifásico de onda completa a tiristor, está representada na figura
a seguir:
Ponte de Graetz a tiristor.
13
Formas de onda do funcionamento:
14
Tensões de linha da rede, Tensões na carga para:
(a) α = 0( ωt = 60o);
(b) α = π /3( ωt = 120o);
(c) α > π /3.
O valor médio da tensão na carga é dado por:
3 × 2 ×V
Vo =
× cos α
π
Ponte Trifásica Mista
Nas aplicações onde não se deseja a operação em dois quadrantes (ou seja, aplicações apenas
como retificador), é recomendável o emprego da ponte mista, representada na figura 3.48, em
substituição à ponte completa.Isto reduz o custo da implementação da estrutura, pelas seguintes
razões:
• Utiliza circuitos de comandos mais simples;
• Emprega apenas 3 tiristores, associados em ponte a 3 diodos.
Ponte trifásica mista.
15
Conversores CC-CC
Em certas aplicações, algumas vezes é necessário transformar uma tensão cc em outra com
magnitude diferente, seja em trens ou metrôs onde uma tensão de cerca de 4000V do sistema de
distribuição é transformada em 300V na alimentação de um motor cc, ou um inversor, ou então, a
partir de 12V alimentar um equipamento de 120V.
Em sistemas de corrente alternada esta operação de baixar, ou elevar a tensão é facilmente feito
com um transformador. Em sistemas em cc a situação é bem diferente, e requer o uso de um
conversor chaveado.
Estruturas estáticas feitas de chaves ativas e idealmente sem perdas que convertem uma tensão
contínua em uma outra com certa magnitude. O dispositivo semicondutor opera a uma freqüência
alta, quando comparado com variações na tensão de entrada.
É possível o uso de filtros passa-baixa para retirar componentes indesejáveis na tensão devido ao
chaveamento.
Aplicações:
• Os conversores cc-cc são usados em fontes para computadores, TV, vídeos, aplicam-se
também em tração de carros elétricos.
• Permitem freios regenerativos com economia de energia em sistemas com freqüentes partidas
e paradas.
• Têm ampla aplicação como reguladores de tensão contínua, carregadores de bateria.
Aplicados também em sistemas para aproveitamento de energias renováveis.
Princípio de Operação
Calculo da tensão média:
ton
Vo =
×V
T
16
CONVERSORES CA-CA
Veremos os conversores que, a partir de uma tensão de entrada alternada, produzem na saída uma
tensão também alternada, mas de potência variável na saída.
Como aplicações típicas podem-se citar, dentre outras:
• aquecimento (controle de temperatura);
• reguladores de tensão;
• controle de intensidade luminosa em lâmpadas incandescentes;
• acionamento de motores CA;
• partida suave de motores de indução;
• compensação de reativos em sistemas de potência (RCT, CCT).
Os dispositivos semicondutores de potência empregados em tais conversores são, tipicamente
tiristores, uma vez que se pode contar com a ocorrência de comutação natural. Em aplicações de
baixa potência pode-se fazer uso de TRIACs, enquanto para potência mais elevada utilizam-se 2
SCRs em antiparalelo, como mostra a figura a seguir.
Variador de tensão CA (monofásico) com TRIAC e com SCR.
Controle Liga-Desliga
Este tipo de controle é usado em situações em que a constante de tempo da carga é muito
grande em relação ao período da rede CA, como em sistemas de aquecimento. O controle
consiste simplesmente em ligar e desligar a alimentação da carga (em geral uma
resistência). O intervalo de condução e também o de bloqueio do interruptor é tipicamente
de muitos ciclos da rede.
Quando a carga é do tipo resistivo, tanto o início da condução quanto seu final podem
ocorrer em situações em que tensão e corrente são nulas (início e final de cada semiciclo da
rede) tem-se, então, o chamado controle por ciclos inteiros. Sua vantagem é o de
praticamente eliminar problemas de Interferência Eletromagnética (IEM) devido a baixos
valores de di/dt e dv/dt produzidos por este tipo de modulação.
Escolhe-se uma base de tempo contendo muitos ciclos da tensão de alimentação. Dentro
do período escolhido, a duração do fornecimento de potência à carga varia desde um
número máximo inteiro de semiciclos até zero. A precisão do ajuste depende, assim, da
base de tempo utilizada. Por exemplo, numa base de 1 segundo existem 120 semiciclos. O
ajuste da tensão aplicada à carga pode ter uma resolução mínima de 1/120.
17
Um método de se conseguir o controle é usar um gerador de sinal triangular, de
freqüência fixa que é comparado com um sinal CC de controle. O sinal dente de serra
estabelece a base de tempo do sistema. O sinal de controle CC vem do circuito de controle
da temperatura. A potência entregue à carga varia proporcionalmente a este sinal. A figura
10.2 ilustra este funcionamento.
Durante “n” ciclos a carga permanece conectada à alimentação, enquanto fica “m”
desconectada.
Tensão sobre a carga
Controle de fase
No chamado Controle de Fase, em um dado semiciclo da rede, o interruptor (tiristor) é
acionado em um determinado instante, fazendo com que a carga esteja conectada à entrada
por um intervalo de tempo menor ou igual a um semiciclo. Os valores de tensão, corrente e
potência na carga dependerão, não apenas de ângulo de disparo, mas também do tipo de
carga alimentada.
18
Circuito e forma de onda de variador de tensão CA monofásico alimentando carga
resistiva
Inversores CC – CA
O inversor é uma estrutura que possibilita a obtenção de energia processada
eletronicamente de forma alternada (CA) a partir de uma fonte de alimentação contínua
(CC) e de entregar parte, ou idealmente toda esta energia às mais diferentes formas de
carga. Ou seja, através do inversor pode-se realizar uma conversão CC - CA entre o
elemento gerador e o elemento consumidor de uma determinada fonte de energia.
Conversão DC/AC
Através do chaveamento de transistores em um circuito trifásico, vamos fazer uma
"prévia", em um circuito monofásico. Observem a figura abaixo, e notem que a estrutura de
um inversor trifásico é praticamente igual ao nosso modelo monofásico. A primeira etapa é
o módulo de retificação e filtragem, que gera uma tensão DC fixa (barramento DC) e que
alimenta os transistores IGBT's.
19
Imaginem agora que o circuito de lógica de controle ligue os transistores 2 a 2 na
seguinte ordem:
• Primeiro tempo - transistores Tl e T4 ligados, e T3 e T2 desligados. Nesse caso, a
corrente circula no sentido de A para B (figura abaixo):
• Segundo tempo - transistores T1 e T4 desligados, e T3 e T 2 ligados. Nesse caso, a
corrente circula no sentido de B para A (figura abaixo).
Ao inverter-se o sentido de corrente, a tensão na carga (motor) passa a ser alternada,
mesmo estando conectada a uma fonte DC. Caso aumentemos a freqüência de chaveamento
desses transistores, também aumentaremos a velocidade de rotação do motor, e vice-versa.
Como os transistores operam como chaves (corte ou saturação), a forma de onda de tensão
de saída do inversor de freqüência é sempre quadrada. Na prática, os transistores chaveiam
modulando largura de pulso (PWM), a fim de se obter uma forma de onda de tensão mais
próxima da senoidal.
Curva V/F
Como vimos anteriormente, se variarmos a freqüência da tensão de saída no inversor,
alteramos na mesma proporção, a velocidade de rotação do motor.
Normalmente, a faixa de variação de freqüência dos inversores fica entre 0,5 e 400 Hz,
dependendo da marca e modelo. (Obs: para trabalhar em freqüências muito altas, o motor
deve ser “preparado”).
A função do inversor de freqüência, entretanto, não é apenas controlar a velocidade de
um motor AC. Ele precisa manter o torque (conjugado) constante para não provocar
alterações na rotação quando o motor estiver com carga.
Um exemplo clássico desse problema é em uma máquina operatriz. Imaginem um
inversor controlando a velocidade de rotação de uma placa (parte da máquina onde a peça a
20
ser usinada é fixada) de um torno. Quando introduzimos a ferramenta de corte, uma carga
mecânica é imposta ao motor, que deve manter a rotação constante. Caso a rotação se
altere, a peça pode apresentar um mau acabamento de usinagem.
Para que esse torque realmente fique constante, por sua vez, o inversor deve manter a
razão V/F (Tensão ÷ Freqüência) constante. Isto é, caso haja mudança de freqüência, ele
deve mudar (na mesma proporção) a tensão, para que a razão se mantenha, como por
exemplo:
F = 50Hz V = 300V V/F = 6
• Situação 1: O inversor foi programado para enviar 50 Hz ao motor, e sua curva V/F
está parametrizada em 6. Automaticamente, ele alimenta o motor com 300 V;
F = 60Hz V = 360V V/F = 6
• Situação 2: O inversor recebeu uma nova instrução para mudar de 50 Hz para 60 Hz.
Agora a tensão passa a ser 360 V e a razão V/F mantém-se em 6.
O valor de V/F pode ser programado (parametrizado) em um inversor, e seu valor
dependerá da aplicação.
Quando o inversor necessita de um grande torque, porém não atinge velocidade muito
alta, atribuímos a ele o maior V/F que o equipamento puder fornecer, e desse modo ele terá
um melhor rendimento em baixas velocidades, além de alto torque. Já no caso em que o
inversor deva operar com altas rotações e com torques não tão altos, parametrizamos um
V/F menor e encontraremos o melhor rendimento para Essa outra situação.
Mas, como o inversor pode mudar a tensão V se ela é fixada no barramento DC, através
da retificação e filtragem da própria rede?
O inversor altera a tensão V oriunda do barramento DC, através da modulação por
largura de pulso (PWM).
A unidade lógica, além de distribuir os pulsos aos IGBT's do modo já estudado, também
controla o tempo em que cada IGBT permanece ligado (ciclo de trabalho).
• Quando V tem que aumentar ,os pulsos são “alargados” (maior tempo em 0N)
• Quando V tem que diminuir, os pulsos são “estreitados”.
Dessa forma, a tensão eficaz entregue ao motor pode ser controlada. A frequência de
PWM também pode ser parametrizada, e geralmente encontra-se entre 2,5 kHz e 16 kHz.
Na medida do possível, devemos deixá-la próximas do limite inferior, pois, assim
Diminuímos as interferências eletromagnéticas geradas pelo sistema (EMI).
Inversor Vetorial
Podemos classificar os inversores em dois tipos: inversores escalares e vetoriais. Os
escalares e vetoriais possuem a mesma estrutura de funcionamento, mas a diferença esta no
modo em que o torque é controlado.
Nos inversores escalares, como dissemos anteriormente, a curva V/F é fixada
(parametrizada), tomando como base o tipo de regime de trabalho em que o inversor irá
operar. Existe porém, uma condição problemática que é justamente o ponto crítico de
qualquer sistema de acionamento AC: as baixas rotações. O sistema AC não consegue um
bom torque com velocidades baixas, devido ao próprio rendimento do motor AC.
Para compensar esse fenômeno, desenvolveu-se o inversor de freqüência vetorial. Muito
mais caro e complexo que o escalar, ele não funciona com uma curva V/F pré-fixada
(parametrizada).
21
Na verdade ele varia tensão e freqüência, de modo a otimizar o torque para qualquer
condição de rotação (baixa ou alta). É como se ficássemos parametrizando a cada ms, uma
nova curva V/F para cada nova situação. O inversor vetorial controla V/F através das
correntes de magnetização e rotórica do motor.
Normalmente um tacômetro, ou um encoder é utilizado como sensores de velocidade,
formando uma "malha fechada" de controle de velocidade. Existem, porém os inversores
vetoriais “sensorless”, que não utilizam sensores de velocidade externos.
Modulação PWM
Agora que já temos uma boa idéia do motor de corrente alternada, vamos a outro
conceito fundamental para entendermos o inversor: a técnica de PWM, que significa "Pulse
Width Modulation". Se traduzirmos a sigla PWM para português temos "modulação por
largura de pulso". Ela é uma técnica de controle de potência, tensão, ou corrente através da
largura do pulso de excitação oriundos dos sistemas de controle. Esse controle é feito
através do seu ciclo de trabalho (Duty Cycle). O ciclo de trabalho é uma característica de
um sinal quadrado que representa a porcentagem ativa do seu período.
Podemos entender melhor o processo através da Figura a seguir. Nela notamos três
sinais cuja forma de onda é quadrada. A amplitude dos três também é a mesma, no
exemplo, igual a 5 Vcc. Como os três têm mesmo período, então, a freqüência tem o
mesmo valor para todos (f = 1=T).
Se os sinais têm a mesma forma-de-onda, mesma amplitude, e mesma freqüência, qual a
diferença a entre eles? O ciclo de trabalho.
O primeiro sinal tem o seu ciclo divido em duas partes iguais: metade "ativa"(on), e
metade "desativada"(off ). Nesse caso temos um ciclo de trabalho de 50%, ou 0,5. Já, na
segunda situação, apenas 30% do total do período, está em "ON", portanto, temos um ciclo
de trabalho igual a 30%. E, naturalmente, na terceira situação um ciclo de 70%.
Ciclo de Trabalho
"E para que isso serve? "Podemos controlar a tensão sob uma carga através desta
técnica. Imaginem, ainda com base no exemplo anterior, que o sinal de ciclo de trabalho de
50% fosse aplicado a uma lâmpada, o de 30% em outra, e o de 70% em uma terceira (todas
com as mesmas características). A primeira lâmpada teria um brilho médio, a segunda
pouco brilho, e a terceira seria a mais brilhante.
22
Como isso aconteceu se não variamos a amplitude? A resposta a esta pergunta é
justamente a razão de ser da técnica de controle da potência através da largura de pulso, e
não da amplitude. Em outras palavras, variamos sim a tensão, mas a eficaz, e não a tensão
da fonte de alimentação. Esta permanece invariável. Com a técnica de PWM, então,
podemos alterar a tensão eficaz na carga sem alterar a tensão na fonte.
Como isto pode ser feito na prática? A figura a seguir mostra um amplificador
operacional em malha aberta (sem realimentação). Desta maneira ele se comporta como um
comparador de tensão. Em sua saída, como o ganho é infinito, ou temos toda a tensão da
fonte (+ Vcc), ou nada (0 Volt, terra). Depende apenas de qual sinal tem maior amplitude
em determinado momento.
Conforme se pode observar, tem-se um sinal dente-de-serra na entrada inversora, e um
sinal perfeitamente contínuo fixo na entrada não inversora (também conhecida como
entrada de referência).
O resultado é que entre to e t1 a tensão na entrada não inversora é maior que a inversora,
levando a saída do AmpOp para saturação (+ Vcc). Já entre t1 e t2, a tensão dente-de-serra
supera a referência, levando agora a saída a zero Volt. Ou seja, a saída do circuito de
função da comparação entre os sinais, e a largura do pulso depende do nível da tensão cc de
referência.
Técnica PWM
Na Figura a seguir aumentou-se o valor da entrada não inversora, e, consequentemente,
a largura do pulso também, uma vez que se modificou o ponto de intersecção entre o sinal
dente-de-serra e o de referência.
23
CIRCUITO INTEGRADO DE DISPARO – TCA785
A finalidade desse circuito integrado é a de facilitar o projeto de circuitos de disparo e
torná-los mais compactos e confiáveis.
Podemos dizer que todo circuito de disparo, em retificadores controlados, deve ser
sincronizado com a rede, ou ocorrerá o disparo aleatório dos tiristores, uma vez que cada
pulso será aplicado num instante diferente, que não está relacionado com a tensão da rede.
24
Detector da passagem por zero
Um ponto de referência para o sincronismo é a passagem da rede por zero. Isto ocorre a
cada 8,33ms, aproximadamente, em redes de 60Hz. No TCA 785, existe um detector da
passagem por zero(bloco DPZ), que gera um pulso de sincronismo toda vez que a tensão da
rede passa por zero.
Referência para detector de passagem por zero
A fonte de alimentação para os circuitos internos é de 3,1V, regulada pelo próprio
TCA785, a partir da tensão de alimentação do circuito integrado (Vs). Podendo assim a
alimentação variar de 8V à 18V.
A tensão de 3,1V também está disponível externamente (pino 8).
Gerador de rampa
O gerador de rampa fornece uma tensão que varia linearmente com o tempo (reta). OU
seja, a tensão dobra se o intervalo de tempo dobrar.
A característica do sincronismo do gerador de rampa é ajustada através dos pinos 9 e 10
por Rr e Cr.
Monitor de descarga
Toda vez que tivermos uma descarga do capacitor (momento em que transistor satura)
nós teremos um pulso através do monitor de descarga, liberando assim um sinal para
memória de sincronização.
Comparador de disparo
A tensão da rampa Vcr é comparada com a tensão Vc, no pino 11 do TCA785, teremos
na subida da rampa (carga do capacitor) nível 1 em Vd, quando a tensão da rampa (Vcr) for
maior que a tensão de controle teremos uma mudança de sinal indicando ao bloco lógica de
formação de pulsos, que uma um pulso de disparo deve ser acoplado em uma de suas
saídas.
25
Fonte de corrente constante
Proporciona a fonte de corrente para a carga e descarga do capacitor.
Transistor de descarga
Transistor que quando saturado vai proporcionar a descarga do capacitor de tempo da
rampa.
Registrador de sincronismo
Irá gerar um pulso de sincronismo que saturará o transistor de descarga do capacitor.
Para liberar este pulso ele também precisa do pulso de sincronismo com a rede
26
27
Sensores
São dispositivos que mudam seu comportamento, sob a ação de uma grandeza física,
podendo fornecer diretamente ou indiretamente um sinal que indica esta grandeza. Quando
operam diretamente, convertendo uma forma de energia neutra, são chamados transdutores.
Os de operação indireta alteram suas propriedades, como a resistência, a capacitância ou a
indutância, sob ação de uma grandeza, de forma mais ou menos proporcional.
O sinal de um sensor pode ser usado para detectar e corrigir desvios em sistemas de
controle, e nos instrumentos de medição, que freqüentemente estão associados aos SC de
malha aberta (não automáticos), orientando o usuário.
Características
• Linearidade: É o grau de proporcionalidade entre o sinal gerado e a grandeza física.
Quanto maior, mais fiel é a resposta do sensor ao estímulo. Os sensores mais usados são
os mais lineares, conferindo mais precisão ao SC. Os sensores não lineares são usados
em faixas limitadas, em que os desvios são aceitáveis, ou com adaptadores especiais,
que corrigem o sinal.
• Faixa de atuação: É o intervalo de valores da grandeza em que pode ser usado o sensor,
sem destruição ou imprecisão.
Sensores de Temperatura
O controle de temperatura é necessário em processos industriais ou comerciais, como a
refrigeração de alimentos e compostos químicos, fornos de fusão (produção de metais e
ligas, destilação fracionada (produção de bebidas e derivados de petróleo), usinas nucleares
e aquecedores e refrigeradores domésticos (fornos elétricos e microondas, freezer e
geladeiras)).
Termistores NTC
Termistores são controladores de modo térmico resistores sensíveis cuja função
principal é exibir uma mudança grande, previsível e precisa em resistência elétrica quando
um equipamento ou produto sofrer uma mudança na temperatura de corpo. Coeficiente de
Temperatura negativo (NTC) (Negative Temperature Coefficient) exibem uma diminuição
em resistência elétrica quando submetido a um aumento em temperatura do equipamento e
Coeficiente de Temperatura Positivo (PTC) (Positive Temperature Coefficient) exibem um
aumento em resistência elétrica quando acontece a um aumento da temperatura do
equipamento que está contido o termistor. Os termistores são capazes de operar em
temperatura abaixo de -100 ° a mais de +600 ° Fahrenheit. Por causa das características
muito previsíveis deles e o excelente termo estabilidade longa deles, os termistores são os
mais recomendados para medida de temperatura e controle de qualquer equipamento.
A característica mais importante de um termistor é, sem dúvida, seu coeficiente de
28
temperatura extremamente de resistência alta. Tecnologia de um termistor moderno resulta
na produção de dispositivos com resistência extremamente preciso contra características de
temperatura, lhes fazendo o sensor mais vantajoso para uma variedade larga de aplicações.
O processo de fabricação dos NTCs é semelhante ao de fabricação das cerâmicas.
Depois de uma mistura intensiva e do acréscimo de um agregante plástico, a massa é
moldada na forma desejada, ou extrusão para obter tarugos ou por pressão para obter discos
e aquecida a uma temperatura suficientemente alta, para sintetizar os óxidos constituintes.
Depois, os contatos são colocados queimando-se os elementos e utilizando-se pasta
de prata. Muitos tipos de encapsulamentos são utilizados conforme, dependendo da
aplicação final do componente.
Os tipos miniaturas, de menor capacidade térmica e maior prontidão são usados
nas medidas de temperatura (NTCs termoelétricos) , enquanto que os maiores são usados
no controle de dispositivos diversos, por exemplo em alarmes e termostatos.
Termistores PTC
Termistores PTC
O termistor PTC é um resistor termicamente sensível feito de material cerâmico, a base
de titanato de bário. Sua resistência elétrica aumenta rapidamente com o aumento da
temperatura, depois que uma determinada temperatura (temperatura de referencia ou de
transição) tenha sido ultrapassada.
Características Elétricas do Termistor PTC:
A relação resistência x temperatura em um termistor PTC pode ser considerada em três
partes distintas. A região abaixo de zero grau até Rmax apresenta coeficiente de
temperatura positivo atingindo valores tão altos quanto 200% /C. Acima de Rmax o
coeficiente de temperatura volta a assumir valores negativos.
Característica Tensão / Corrente
A curva (VxI) de um PTC é fortemente influenciada pelas condições de dissipação de
potencia do componente assim como pelas condições ambientes. Normalmente adota-se a
temperatura de 25°C sob ar circulante para se levantar a curva (VxI) para o PTC.
Aplicações do PTC:
- Sensores de Temperatura: Medindo a temperatura de equipamentos
- PTC de aquecimento: Utilizado em equipamentos de aquecimentos como chapinhas
para cabelos, desumidificador de papel.
-PTC de proteção de motores ou termostatos: Usado junto ao enrolamento das bobinas
dos motores indicando a temperatura para um rele de proteção.
- PTC para surto de corrente: Quando acontece um curto-circuito ou uma condição de
elevação de corrente, o PTC sofre uma transição para seu estado de alta resistência ôhmica
limitando o fluxo de corrente no circuito, mantendo-o em nível de operação normal.
29
Sensores RTD
RTD é abreviação inglesa de Resistance Temperature Detector. A base do
funcionamento é o conhecido fenômeno da variação da resistência elétrica dos metais com
a temperatura. Os metais mais usados são platina, níquel, cobre, ferro, molibdênio e/ou
ligas dos mesmos.
Embora os sensores vistos nos tópicos anteriores usem princípios similares, em geral
eles não são classificados como RTD´s, uma vez que os elementos resistivos não são
metais, mas sim óxidos e semicondutores.
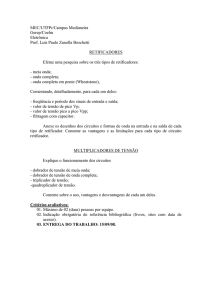
Esboços dos dois tipos comuns de RTD
Em (a), o RTD de fio (o fio metálico é enrolado em forma de espiral dentro de um tubo
cerâmico com suportes e outros detalhes não mostrados).
Em (b), o RTD de filme (um filme metálico é depositado sobre uma placa de cerâmica).
O RTD de filme é também colocado no interior de um tubo para proteção.
O resultado prático é uma variação bastante pequena de resistência e circuitos adequados
devem ser usados. Ver no gráfico a comparação com um termistor típico.
É praxe a especificação térmica de um RTD ser dada pelo coeficiente médio (α) de
temperatura na faixa de 0 a 100ºC.
Pequenas proporções de impurezas ou elementos de liga podem afetar
consideravelmente o coeficiente de temperatura. Algumas vezes, impurezas são
propositalmente adicionadas para contrabalançar o efeito de impurezas existentes de difícil
remoção.
Embora, para o caso de RTDs, seja desejável a maior variação possível de resistência
com a temperatura, em outros casos deve ser o contrário. Exemplo: uma liga de 84% Cu
12% Mn 4% Ni quase não apresenta variação com a temperatura. É usada para fabricar
30
resistores de precisão.
Segue tabela comparativa para alguns metais e ligas mais usados.
Metal
Cobre
Cu
Faixa ºC
−200/260
Alfa
0,00427
Observações
Baixo custo.
Opção de menor custo p/ Pt em faixa
limitada.
O custo é baixo, mas a faixa é
limitada.
Molibdênio Mo
−200/200
0,00300 e 0,00385
Níquel
Ni
−80/260
0,00672
Níquelferro
Platina
NiFe
Pt
−200/200
0,00518
Baixo custo.
−240/660
0,00385 e 0,00392
Boa precisão.
Sensores Termopares
Os sensores anteriores operam basicamente pela variação da resistência elétrica com a
temperatura. Isso significa que uma corrente elétrica deve ser fornecida ao elemento sensor.
O termopar opera de modo completamente diverso. Ele gera uma tensão elétrica que tem
relação com a diferença de temperaturas entre junções de metais diferentes. A Figura dá o
esquema básico do funcionamento.
A junção da extremidade é a junção de medição e fica fisicamente no local do qual se
deseja medir a temperatura. As duas junções de conexão dos fios para o dispositivo de
medição são as junções de referência ou junções frias. Embora sejam duas, na realidade
podem ser consideradas únicas, pois o metal em ambos os condutores é o mesmo (cobre
normalmente).
Além da tensão provocada pela diferença de temperaturas entre junções, há a parcela
gerada pelo gradiente de temperatura ao longo dos fios. Ao contrário da primeira, ela tem
uma relação quadrática com a temperatura e é responsável pela relação não linear do
dispositivo.
Notar que junções na mesma temperatura não afetam a saída. Assim, elas podem ser
soldadas (as junções produzidas pelo metal da solda estão na mesma temperatura).
Vantagens e desvantagens
Termopares geram sua própria tensão, não requerem corrente de excitação (isso significa
31
que não há erros por auto-aquecimento, que podem ocorrer com os anteriores). São simples,
robustos, imunes a vibrações, fáceis de construir, operam em ampla faixa de valores. Por
essas características, são amplamente usados em equipamentos industriais.
Certamente as principais desvantagens são o baixo nível da saída (valores típicos estão
na faixa de 50 mV), a não linearidade e a necessidade de compensação da temperatura da
junção de referência. Com níveis tão baixos de tensão, cuidados devem ser tomados para
evitar ação de interferências (blindagens, fios trançados, etc).
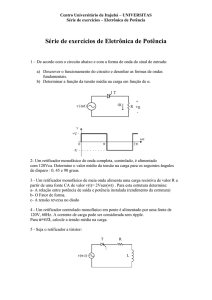
Dois exemplos de arranjos de termopares.
Em (a), o elemento é colocado no interior de um tubo (aço inox com peças internas de
cerâmica para evitar contato elétrico para temperaturas mais altas). Essa construção dá
alguma proteção contra ação do meio.
Em (b), o elemento é envolvido por uma barra cerâmica, deixando somente a junção
exposta. Há menor proteção, mas as respostas às variações são mais rápidas.
A tabela abaixo relaciona alguns tipos de termopares mais usados.
Tipo Positivo
Negativo
B
Pt 30%Rh
Pt 6%Rh
C
D
W 5%Re
W 3%Re
W 26%Re
W 25%Re
E
Ni 10%Cr
Cu 45%Ni
G
W
W 26%Re
J
Fe
Cu 45%Ni
K
Ni 10%Cr
Ni 2%Al
2%Mn 1%Si
M
Ni
Ni 18%Mo
N
Ni 14%Cr
1,5%Si
Ni 4,5%Si
0,1%Mg
R
Pt 13%Rh
Pt
Precisão
0,5%
>800°C
1% >425°C
1% >425°C
0,5% ou
1,7°C
1% >425°C
0,75% ou
2,2°C
0,75% ou
2,2°C
0,75% ou
2,2°C
0,75% ou
2,2°C
0,25% ou
1,5°C
Faixa
50 a
1820
0 a 2315
0 a 2315
−270 a
1000
0 a 2315
−210 a
1200
−270 a
1372
−50 a
1410
−270 a
1300
−50 a
1768
Observações
Para altas temperaturas.
Para temperaturas muito altas.
Para temperaturas muito altas.
Uso geral para temperaturas
médias e baixas.
Para temperaturas muito altas.
Alta temperatura em atmosfera
redutora.
Uso geral, alta temperatura em
atmosfera oxidante.
Substituto melhor para o tipo K
De precisão, para alta
temperatura.
32
S
Pt 10%Rh
Pt
T
Cu
Cu 45%Ni
0,25% ou
1,5°C
0,75% ou
1,0°C
−50 a
1768
−270 a
400
De precisão, para alta
temperatura
Uso geral p/ baixa temperatura,
resistente à umidade
Compensação
Conforme já dito, a tensão do termopar é função da diferença de temperaturas das junções
de medição e de referência. Por estar junto do equipamento, a temperatura desta última é
normalmente acima da temperatura ambiente. E o que se deseja saber é a temperatura da
junção de medição e não essa diferença. Um meio de se evitar isso é o uso de cabos
especiais, dos mesmos metais dos elementos do termopar ou ligas com características
termoelétricas similares. Assim, eletricamente não há a junção de referência. É como se o
termopar se estendesse até o dispositivo de medição.
Outra possibilidade são circuitos de compensação conforme Figura 03, que dispensam
cabos especiais, podendo ser usados condutores de cobre.
As junções de referência devem estar em um bloco de material isolante com alguma
condutividade térmica, de forma que um sensor (termistor ou RTD) capta a temperatura
real da junção.
Na medição analógica (a), o sinal do sensor de temperatura é amplificado para um nível
tal que o somador compensa a tensão gerada pela junção de referência. No arranjo digital
(b) o circuito de medição faz o processamento. É uma solução melhor. Em caso de
mudança do tipo de termopar, o ajuste pode ser facilmente executado via software.
O circuito de medição também deve compensar a não linearidade da função tensão x
temperatura do termopar.
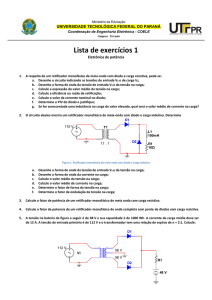
Termopares também podem ser ligados em série, formando uma termopilha. Com isso, a
tensão de saída é aumentada, amenizando o problema da baixa tensão individual.
33
No diagrama da figura acima, a tensão V é proporcional à diferença de temperaturas Ta Tb.
Termopilhas com dezenas ou centenas de termopares são usadas em instrumentos como
medidores de fluxo de calor, radiômetros e outros. Podem ser construídas com fios ou
outras técnicas como eletrodeposição.
O efeito termoelétrico também pode ser usado para gerar energia. Geradores
termoelétricos foram usados em algumas sondas espaciais. Com termopilhas e ligas
especiais para maximizar a corrente. A fonte de calor é um material radioativo como o
plutônio e o resfriamento é dado pela dissipação no espaço. Geradores desse tipo podem
fornecer dezenas de watts por vários anos. Entretanto, os perigos da radioatividade
impedem o emprego em outras áreas.
O termopar pode operar de forma inversa, isto é, se uma corrente é aplicada no mesmo,
uma junção aquece e a outra esfria. Isso é chamado efeito Peltier e é usado em pequenos
dispositivos de refrigeração.
34