1
Estudo e determinação de parâmetros de
geradores síncronos de polos salientes
utilizando técnicas de elementos finitos (Parte I)
Diodomiro Luque, e Ernesto Ruppert
Abstract-- This paper shows the determination of the parameters
of a salient-pole synchronous machine by simulation of the sudden
short-circuit test using the finite elements techniques. The
simulations are based on IEEE Std115 standard and 34-4 IEC
tests, [5], [6]. These simulations are performed due to importance
to obtain the precise values of the parameters, in order to refine
the analysis and improve the performance of the study of
synchronous machine. The results are analyzed to a machine of
6,25 MVA, 4,16 kV, 60 Hz, and 360 rpm.
Index Terms-- Synchronous generator, finite element, machine
parameters.
Resumo-- Este trabalho apresenta a determinação dos
parâmetros da máquina síncrona de polos salientes através da
simulação dos ensaios de curto circuito brusco utilizando as
técnicas dos elementos finitos. As simulações dos ensaios baseiamse na norma Std115 do IEEE e a norma 34-4 do IEC, [5], [6].
Estas simulações foram realizadas devido à importância de se
obter valores precisos dos parâmetros, de modo a apurar a análise
e melhorar o desempenho do estudo da máquina síncrona. Os
resultados são analisados para uma máquina de 6,25 MVA, 4,16
kV, 60 Hz, e 360 rpm.
Palavras chave-- Gerador
determinação de parâmetros.
síncrono,
elementos
finitos,
I. INTRODUÇÃO
necessidade da obtenção dos parâmetros característicos
do gerador síncrono de polos salientes surge no intuito de
viabilizar um modelo matemático caracterizado por um
circuito elétrico equivalente que seja capaz de predizer ou
representar o seu comportamento em diversas condições de
operação e conhecer sua influência a partir dos seus aspectos
construtivos. Uma alternativa para encontrar os parâmetros da
máquina síncrona de polos salientes é a partir do
conhecimento do projeto da mesma. É de grande interesse
obter valores precisos dos parâmetros, de modo a apurar a
análise e melhorar o desempenho do estudo da máquina
síncrona.
A
Este trabalho contou com o apoio financeiro da CAPES - Coordenação de
Aperfeiçoamento de Pessoal de Nível Superior e da CNPq - Conselho
Nacional de Desenvolvimento Científico e Tecnológico.
D. Luque (e-mail: [email protected]).
E. Ruppert, UNICAMP, Brasil (e-mail: [email protected]).
Para a determinação dos parâmetros do gerador síncrono
de polos salientes são utilizados diversos procedimentos de
ensaios descritos na literatura, [5], [16]. Os parâmetros
elétricos da máquina síncrona são conhecidos também como
parâmetros padronizados, [10]. Esses parâmetros padronizados
são associados ao sistema de referência dos eixos direto “d” e
de quadratura “q” da máquina elétrica e que são descritos
como: Xd, reatância de eixo d, X’d, reatância transitória de eixo
d, X”d, reatância subtransitória de eixo d, T’d, constante de
tempo transitória no eixo d, T”d, constante de tempo
subtransitória de eixo d, Xq, reatância de quadratura, X”q,
reatância subtransitória de quadratura e T”q, constante de
tempo subtransitória de eixo q, [11].
Existe uma série de procedimentos de ensaios que
permitem determinar os valores dos parâmetros elétricos de
uma máquina síncrona de polos salientes entre eles os mais
utilizados são os ensaios realizados em laboratórios como é o
caso do curto circuito brusco, este ensaio quando realizado no
campo, é perigoso e pode trazer alguns riscos como, por
exemplo, expor a máquina síncrona a uma elevada corrente
entre seus terminais. Esses ensaios são modelados e simulados
usando a formulação das técnicas dos elementos finitos (EF) a
partir do conhecimento das características do projeto de
máquina. A determinação dos fluxos magnéticos e outras
grandezas são realizadas durante a operação transitória
(análise dinâmica). Os pacotes computacionais utilizadas para
este fim são o Maxwell e o Simplorer, ambas de propriedade
da ANSYS, [18], [19]. Para o tratamento dos dados tem sido
usados processos de identificação e de otimização com a
finalidade de obter resultados satisfatórios.
Neste trabalho simulam-se os ensaios de curto circuito
brusco, cujos procedimentos são descritos pela norma Std115
do IEEE, [5].
II. MODELAGEM DO GERADOR SÍNCRONO ATRAVÉS DO MEF
Os fenômenos eletromagnéticos presentes nas máquinas
síncronas de polos salientes, como, por exemplo, a saturação
dos materiais ferromagnéticos quando submetidos a campos de
grande intensidade, a geometria complexa da máquina entre
outros fatores fazem das máquinas síncronas um problema de
complexa solução analítica, sendo necessário recorrer a
formulações e métodos numéricos para sua modelagem e
solução.
Neste trabalho o gerador síncrono de polos salientes é
modelado utilizando técnicas de elementos finitos no domínio
2
bidimensional, que consiste em representar a região de corte
da seção transversal da mesma. Na operação de um modelo de
duas dimensões, algumas considerações devem ser tomadas:
redução da estrutura segundo a sua simetria axial, os efeitos de
borda e os efeitos nas cabeças de bobina do estator, o circuito
amortecedor, entre outras, todas elas podem ser caracterizados
através da inserção de parâmetros concentrados, [19].
Existem no mercado diferentes ferramentas computacionais
baseados em técnicas de elementos finitos que dão suporte
para realizar uma análise eletromagnética, [10], [18]. Para
realizar uma modelagem por meio de método dos elementos
finitos requerem-se conhecer apriori os dados do projeto de
máquina referidos aos valores geométricos e as propriedades
físicas dos elementos elétricos, magnéticos que envolvem uma
máquina síncrona.
O estudo e análise eletromagnético de máquinas síncronas
usando o método dos elementos finitos (MEF) baseiam-se nas
equações magnetodinâmicas de Maxwell, [18]. A indução
magnética possui uma relação direta com o fluxo magnético, o
que leva a estabelecer de uma maneira simples o acoplamento
entre os campos elétrico e magnético. Uma forma de se
resolver a indução magnética B no plano xy é utilizando a
formulação chamada de potencial vetor magnético Az ,
equação 1.
∂A − ∂Az
(1)
Bx , y = z ,
∂y ∂x
A primeira equação de Maxwell, equação 2, corresponde à
lei de Faraday, onde, um campo magnético variável no tempo
produz uma tensão induzida, denominada força eletromotriz
ou simplesmente fem .
∂Bx , y
∂
∂
∂A
(2)
( Ez ) +
=
( Ez + z ) = 0
∂y, ∂x
∂t
∂y, ∂x
∂t
E z é gerado somente
pela variação no tempo da indução magnética B e o potencial
vetor Az definido no tempo. As duas expressões representam
o gradiente do potencial escalar elétrico V , equação 3.
A equação 6 é conhecida também como a equação de
Poisson para o potencial vetor magnético Az e para a
densidade de corrente elétrica. Na sua forma geral ela descreve
não apenas os fenômenos eletromagnéticos, mas também
outros fenômenos como são: fluxo de calor, gravitação,
pressão, entre outros.
A seguir, substituindo a equação 4 na equação 6 podemos
determinar a equação 7, ela representa a evolução temporal do
potencial vetor Az para a seção transversal ( x, y ) da
máquina. O primeiro termo da direita da equação representa a
densidade de corrente aplicada nos condutores externos
conectados nas fontes de tensão e o segundo termo dessa
mesma equação representa a densidade de corrente induzida.
∂ 1 ∂Az
∂ 1 ∂Az
∂V
∂A
(
)+ (
) =σ
+σ z
∂x µ ∂x
∂y µ ∂y
∂z
∂t
(7)
A solução através do MEF sustenta-se na formulação do
método variacional, procedimento numérico baseado na
minimização de funções que discretiza espacialmente o
domínio através de malhas triangulares. O método variacional
utiliza a equação 7 para resolver problemas eletromagnéticos
no domínio do tempo.
Definida a formulação matemática, o procedimento
computacional para resolver problemas eletromagnéticos
mediante o MEF é divida em três etapas: pre-processamento,
processamento e pós-processamento.
Considerando que o campo vetorial
∂Az
∂V
(3)
=−
∂t
∂z
Utilizando a equação 3 e substituindo-lo na relação das
grandezas físicas J = σE , podemos obter a densidade de
Pré-processamento
Processamento
Pós-processamento
Figura 1: Etapas de modelagem
Ez +
corrente elétrica em termos de potencial vetor
escalar elétrico V , equação 4.
J z = σE z = σ (−
Az e potencial
∂Az ∂V
)
−
∂t
∂z
(4)
∂
( H x, y ) = J z
∂y, ∂x
(5)
Da equação 5, que descreve a relação entre a intensidade
do campo e a densidade de corrente e da relação constitutiva
de Bx , y = µH x , y associada à equação 1, pode-se obter a
densidade de corrente em termos do potencial vetor
∂ Az
∂ A
+ ( 2z ) = − µJ z
2
∂x
∂y
2
Az .
Pré-processamento
Consiste em preparar, adequar e definir os dados
geométricos do gerador síncrono de polos salientes através da
implementação de desenhos assistidos por computador CAD.
Definida a geometria da máquina, procede-se à definição das
propriedades físicas, as condições de fronteira e a geração de
malhas triangulares da máquina.
A idéia básica da aplicação do MEF é dividir o domínio da
máquina em pequenos elementos suficientes. A forma mais
comum de aproximação para o potencial vetor magnético Az
no interior de um elemento triangular é a aproximação
polinomial, de forma geral o polinômio pode-se definir como:
Az ( x, y ) = a0 + a1 x + a2 y
2
(8)
(6)
As condições de contorno escolhidas para o gerador
síncrono são as condições de Dirichlet e Neumann. A
3
condição de Dirichlet é utilizada no contorno onde o campo é
paralelo ao segmento. A condição de Neumann é utilizada na
fronteira onde o campo é perpendicular ao segmento, esta
condição se relaciona com a simetria da máquina.
Por último, o modelo requer a atribuição de outras
propriedades como, por exemplo: corrente, velocidade, torque,
além de representar os parâmetros concentrados.
Processamento
A solução do problema através do MEF, requer a
determinação do potencial vetor magnético Az , para cada nó
do elemento triangular representado por meio da expressão
polinomial, equação 8. Assim, a etapa de processamento
requer uma série de cálculos computacionais que envolvem a
solução de um determinado número finito de equações
algébricas lineares. A ferramenta computacional utilizada para
este propósito é o Maxwell. A solução do modelo representado
em muitos casos depende fortemente da capacidade
computacional do equipamento utilizado.
Pós-processamento
A etapa de pós-processamento ocupa-se de sistematizar os
resultados obtidos por meio do MEF. Nesta etapa, podem-se
computar vários tipos de magnitudes e grandezas derivadas
dos valores do potencial vetor magnético Az. Isto permite
determinar diferentes quantidades e características elétricas,
magnéticas e mecânicas.
onde se encontram as lâminas ferromagnéticas é obtido a partir
de curvas B-H fornecidas pelo fabricante de aço e a
condutividade elétrica dos condutores é determinada pelas
características do material utilizado nas sub-regiões que
correspondem aos enrolamentos amortecedores, os
enrolamentos do rotor, e do estator. As malhas impostas à
máquina contêm no total 20106 elementos triangulares e eles
estão mais concentrados na região do entreferro e na região
das ranhuras do estator, onde o campo é variável no tempo.
Em termos de tempo de processamento computacional
reduzir o gerador síncrono na sua mínima simetria e
periodicidade é uma vantagem.
B. Condições preliminares dos ensaios
Os procedimentos para determinar os parâmetros
característicos da máquina síncrona de polos salientes são
baseados nos ensaios descritos na norma Std115 do IEEE e da
norma 34-4 do IEC, [5], [6].
TABELA 1: CONDIÇÕES NOMINAIS DO HIDROGERADOR
Potência aparente
6250
kVA
Tensão de linha
4160
V
Corrente
867,4
A
Fator de potência
0,85
Frequência
60
Hz
Número de polos
20
Tensão de excitação
86,2
V
Corrente de excitação
315,2
A
Em geral, os ensaios em campo requerem uma
implementação significativa de equipamentos, instrumentação,
sistemas de alimentação, óleo, ar, hidrogênio, água, etc. e elas
demandam um alto custo, [10]. Por outro lado, através das
ferramentas computacionais atuais é possível realizar
representar os ensaios sem nenhuma limitação física e perigo
que envolve um ensaio real.
TABELA 2: DIMENSÕES DE PROJETO DO HIDROGERADOR
360
6250 kVA
4160 V
60 Hz
rpm
Estator
Rotor
Diâmetro externo
2745,7 mm
Número de polos
Diâmetro interno
2387,6 mm
Diâmetro externo
Corpo da sapata
polar
Distância
da
sapata polar
Comprimento
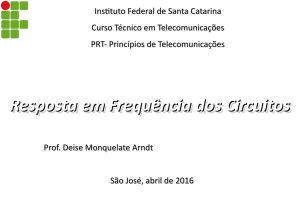
Figura 2: Geometria da máquina através do MEF
A. Geometria do modelo
Numa máquina elétrica geralmente existe uma simetria
entre os polos da máquina em relação ao número de ranhuras
do estator. Pelas suas condições de simetria e periodicidade a
máquina foi reduzida para um quarto do seu tamanho original.
Na figura 2 mostra-se a estrutura em estudo da máquina
síncrona. O domínio representado é dividido em três subregiões principais com base em suas propriedades elétricas e
magnéticas que são: condutor, aço e ar. Na sub-região do
entreferro, nas sub-regiões interpolares, fora dos enrolamentos
das ranhuras a condutividade elétrica é assumida como zero,
por tanto, µ r = 1 , a permeabilidade magnética nas sub-regiões
Número
ranhuras
660,4 mm
de
228
20
2367,3 mm
635 mm
301,3 mm
376,625
mm
Altura da coroa
93,76 mm
Passo polar
Altura dos dentes
84,04 mm
Altura do polo no
centro
Largura do dente
17,53 mm
Altura do polo
226 mm
Largura da ranhura
17,68 mm
Largura do corpo
polar
177 mm
Passo de dentadura
32,96 mm
Largura da bobina
62,15 mm
36,16 mm
No trabalho, a máquina síncrona utilizada para a simulação
dos ensaios corresponde a um hidrogerador cujas
características nominais e dimensões são mostradas nas tabelas
1 e 2. Os parâmetros obtidos a partir dos dados de no projeto
do hidrogerador (tabelas 3 e 4) são utilizados para validar os
4
resultados a serem alcançados nas simulações dos ensaios por
elementos finitos.
TABELA 3: PARÂMETROS DO HIDROGERADOR
Resistência de armadura
0,0166616
Ω
Reatância de dispersão na armadura
0,284745
Ω
Reatância de magnetização do eixo d
2,52046
Ω
Reatância de magnetização do eixo q
1,35831
Ω
2,80521
0,284745
Ω
Ω
0,273394
Ω
Reatância síncrona de eixo d
Reatância síncrona de eixo q
Resistência de enrolamento de campo
síncrono de polos salientes são realizados através da análise
dinâmica. Existem na literatura vários trabalhos sobre ensaios
de curto circuito brusco que permitem determinar os valores
dos parâmetros elétricos, [1], [4], [5], [7], [8], [12], [15], [17].
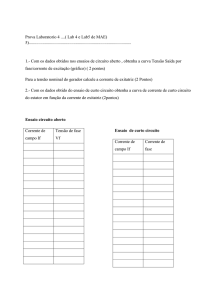
Sistema em vazio (sem
carga)
Chaves de curto circuito
simétrico
TABELA 4: PARÂMETROS TRANSITÓRIOS E CONSTANTES
DE TEMPO DO HIDROGERADOR
0,77826
Ω
0,539801
Ω
- Reatância sub-transitória de eixo q
X d′
X d′′
X q′′
0,425392
Ω
- Reatância de dispersão de campo
Xf
0,613675
Ω
- Reatância de dispersão do
enrolamento amortecedor no eixo d
- Reatância de dispersão do
enrolamento amortecedor no eixo q
- Resistência de enrolamento
amortecedor no eixo d
- Resistência de enrolamento
amortecedor no eixo q
- Constante de tempo transitório de
eixo d
- Constante de tempo transitório de
eixo d com armadura em circuito
aberto
- Constante de tempo sub-transitório
de eixo d
- Constante de tempo sub-transitório
de eixo q
- Constante de tempo sub-transitório
de eixo q com armadura em circuito
aberto
X md
0,527866
Ω
X mq
0,156893
Ω
Rkd
0,131828
Ω
Rkq
0,0618237
Ω
Td′
0,86721
s
Td′0
0,0205518
s
- Reatância sub-transitória de eixo d
Figura 3: Esquema de simulação para o ensaio de curto circuito brusco
O ensaio de curto circuito brusco é a técnica mais
amplamente utilizada e consolidada para a obtenção de
parâmetros e constantes de tempo de máquinas síncronas, [9],
[16]. O método consiste em realizar um curto circuito trifásico
simultâneo nos terminais da armadura da máquina. A obtenção
dos parâmetros realiza-se a partir das respostas dinâmicas da
corrente de armadura.
Embora já existam trabalhos sobre ensaios de curto circuito
brusco há bastante tempo, os primeiros trabalhos utilizando
técnicas de elementos finitos aplicados aos ensaios de curto
circuito brusco começaram a ser relatados a partir da década
dos 90 s . Vários foram os pesquisadores que utilizaram as
primeiras ferramentas computacionais orientadas a elementos
finitos, [7], [9], [11], [12], [13], [16].
4
1.5
Td′′
Tq′′
Tq′0′
0,0142547
s
0,0168315
s
0,0650106
s
A simulação dos ensaios realizados pode ser classificada
como: ensaio de curto circuito brusco, ensaio de rejeição de
carga de eixo direto, ensaio de rejeição de carga em
quadratura, ensaio de rejeição de carga de eixo arbitrário e
ensaio de resposta em freqüência.
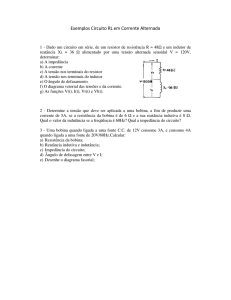
x 10
1
Subtransitório
Correntes de fase Ia, Ib, Ic [A]
- Reatância transitória de eixo d
Gerador modelado por
elementos finitos
Abertura das chaves
após o curto circuito
0.5
0
-0.5
-1
-1.5
0
III. ENSAIO DE CURTO CIRCUITO BRUSCO
A maioria dos curto circuitos ou falhas que acontecem nos
sistemas de distribuição de energia são não simétricos entre
fases. No entanto, o curto circuito trifásico é importante
porque, a pesar de ser rara é a mais grave porque desencadeia
correntes mais elevadas de curto circuito que provocaria
instabilidade no funcionamento da máquina síncrona,
colocando-a em situações excepcionais de risco para sua
integridade e conseqüentemente sua influenza no sistema
elétrico. Por tanto, é motivo de amplo estudo, visando
principalmente a determinação das características transitórias
da máquina. A determinação dos parâmetros do gerador
Regime
permanente
Transitório
1
2
3
4
5
6
7
8
9
10
Tempo [s]
Figura 4: Corrente de armadura após o curto circuito brusco
Atualmente, o ensaio de curto circuito brusco é um método
estandarizado cujo procedimento obedece à norma Std115 do
IEEE, [5]. No ensaio, assume-se que antes do curto circuito
trifásico brusco a máquina opera sem carga (condição em
vazio), com velocidade de rotação nominal (velocidade
síncrona), excitada por uma corrente de campo que induz uma
tensão nos terminais da armadura em um valor correspondente
à condição nominal de operação. Quando a máquina está sem
carga não há corrente nos terminais da armadura, a única
corrente que flui é no enrolamento de campo. Nessa condição
5
é subitamente curto circuitado simultaneamente as três fases
dos enrolamentos da armadura e nesse instante é registrado a
variação da corrente nos terminais da armadura, figuras 3, e 4.
A corrente de armadura e a corrente de campo durante o curto
circuito são usadas para obter as diferentes reatâncias e
constantes de tempo padronizadas de eixo direto do gerador.
Após o curto circuito o rotor da máquina deve continuar na
velocidade síncrona.
Na figura 4, o período subtransitório ocorre durante os
primeiros ciclos de corrente de armadura, quando esta corrente
sofre um decaimento muito rapidamente, seguido de um
período chamado de transitório, onde, a corrente de armadura
decresce lentamente buscando seu valor de regime, finalmente
no período de regime permanente onde a corrente de armadura
chega a se estabilizar no seu valor nominal.
As reatâncias transitórias e subtransitórias são
determinadas a partir das envoltórias das formas de onda da
corrente de armadura obtidas após a aplicação do curto
circuito brusco nas três fases, figura 5.
12000
10000
componente contínua (componente d.c.), [16]. As equações
para determinar as componentes tanto a.c. quanto contínua do
ensaio são definidas como:
I ac =
(9)
I ma′x + I mi′n
(10)
2
quando essas envoltórias são determinadas a análise de I ac
I dc =
permite a identificação das constantes de tempo transitórias e
subtransitórias assim como as reatância transitória e
subtransitória a partir da equação 11.
I ac (t ) = I ss (t ) + I ′(t ) + I ′′(t )
(11)
onde, I ss (t ) corresponde ao período de regime permanente,
I ′(t ) representa ao período transitório e I ′′(t ) corresponde ao
período subtransitório. Sendo que I ′(t ) = I d′ exp ( −t/Td′ ) e
I ′′(t ) = I d′′exp
Envoltória superior
I ma′x − I mi′n
2
( − t/Td′′ )
.
Corrente da fase a
[A]
8000
6000
Em
I máx − I min
2
4000
2000
0
I máx + I min
2
-2000
-4000
Envoltória inferior
0
1
termos
de
logaritmo
expressam-se
como
ln( I ′(t )) = A′t + B′ e ln( I ′′(t )) = A′′t + B′′ que representam linhas
2
3
4
5
6
7
8
9
10
Tempo [s]
retas devido à variação exponencial de I ′(t ) e I ′′(t ) .
Extrapolado por técnicas de regressão polinomial e fazendo
com que I ′(0) = exp( B′) , I ′′(0) = exp( B′′) no instante do curto
circuito brusco, as expressões em logaritmo natural permitem
determinar tanto as constantes de tempo quanto as reatâncias
transitórias e subtransitórias.
U
(12)
X =
d
I ss
1
Td′ = −
A′
Figura 5: Componentes da corrente de armadura
O estudo da envoltória é importante porque mostra o
comportamento global da máquina quando exposto a um
evento como é o caso do curto circuito brusco, é ela quem
preserva os fenômenos que ocorrem na máquina síncrona. O
procedimento para determinar as envoltórias superior e
inferior segundo a norma Std115 do IEEE sugere realizar uma
sincronização das envoltórias, [5]. Não é recomendável
realizar uma simples adição ou subtração para determinar as
componentes, devido a que os valores correspondentes aos
picos superiores e inferiores das envoltórias para cada fase são
diferentes e não correspondem a um mesmo passo no tempo, a
análise dessas envoltórias requer um tratamento adequado
junto aos dados obtidos nos ensaios. O tratamento de dados
basicamente refere-se ao uso de técnicas de ajuste de curvas,
suavização mediante o uso de métodos de regressão
polinomial baseado em mínimos quadrados. O ajuste de curvas
realiza-se usando a função “fitting” do MatLab, as envoltórias
superior e inferior de cada fase de corrente de armadura
precisam de operações algébricas que podem ser realizadas
por modelos polinomiais já que para cada passo de tempo as
três fases devem conter valores específicos. Inicialmente,
determinam-se as componentes que fazem parte dela. Estas
componentes podem ser identificadas como: componente a.c. e
X d′ =
U
I ss + I ′(0)
Td′′ = −
X d′′ =
(13)
1
A′′
U
I ss + I ′(0) + I ′′(0)
(14)
(15)
(16)
Por outro lado, a metodologia analítica para representar as
formas de onda do ensaio de curto circuito brusco foi muito
bem estudada e estabelecida na literatura. A expressão
analítica da equação 16, define o comportamento da corrente
de armadura por fase frente a um curto circuito brusco
trifásico, [6].
is = U [
1
1
1
1
1
′
′′
+(
−
−
) exp −t/Td + (
) exp −t/Td ]cos(ω 0 t + θ 0 )
Xd
X d′ X d
X d′′ X d′
(17)
onde, I ss = U/X d , I ′d = U/X d′ − U/X d e I d′′ = U/X d′′ − U/X d′ .
6
1
representar mediante a modelagem eletromagnética do gerador
síncrono os procedimentos descritos nos ensaios.
O ensaio de curto circuito brusco brinda informações dos
parâmetros referentes ao eixo direto.
Todos os dados obtidos a partir do projeto de máquina
foram verificados e comparados com os dados dos ensaios de
curto circuito brusco. As comparações dos resultados foram de
razoáveis para os parâmetros encontrados tanto para o regime
permanente quanto para o regime transitório. Pode-se concluir
dizendo que é possível determinar os parâmetros do gerador
síncrono a partir do modelo geométrico da máquina síncrona e
alcançar resultados satisfatórios sem a necessidade de realizar
um ensaio real que envolve tempo e custo.
10
0,368*h1 = 0,9448
0,368*h2 = 0,5986
0
10
X: 0.0142
Y: 0.5986
Corrente
[pu]
X: 0.8668
Y: 0.9448
-1
10
-2
10
-3
10
0
0.1
0.2
0.3
0.4
T’’d = 0,0143
0.5
0.6
0.7
0.8
0.9
T’d = 0,8668
Tempo [s]
Figura 6: Determinação das constantes de tempo
Assim, os cálculos em pu para a determinação dos
parâmetros do gerador síncrono foram realizados utilizando as
equações 12, 14 e 16.
1
U
(18)
=
= 1,013 pu
Xd =
I ss 0,98717
1
U
(19)
=
= 0,28132 pu
I ss + I ss′ 0,98717 + 2,5675
1
U
=
= 0,1930 pu
X d′′ =
I ss + I ss′ + I ss′′ 0,98717 + 2,5675 + 1,6267
X d′ =
(20)
As constantes de tempo foram obtidas a partir da figura
3.23.
(21)
h1 = I ' ss *0,368 = 0,94484
(22)
h2 = I "ss *0,368 = 0,59863
T ' d = 0,86677 s
(23)
T ' ' d = 0,014245 s
(24)
TABELA 5: PARÂMETROS OBTIDOS A PARTIR DOS ENSAIOS DE
CURTO CIRCUITO BRUSCO
Reatância de eixo d em pu
pu
X d = 1,013
Reatância transitória de eixo d em pu
X d′ = 0,28132
pu
Reatância sub-transitória de eixo d em pu
pu
Reatância de eixo d em ohms
X d′′ = 0,1930
X d = 2,8042
Reatância transitória de eixo d em ohms
X d′ = 0,77875
Ω
Reatância sub-transitória de eixo d em
ohms
Constante de tempo transitória em
segundos
Constante de tempo sub-transitória em
segundos
X d′′ = 0,53426
Ω
Td′ = 0,86677
s
Td′′ = 0,014245
s
Ω
IV. CONCLUSÕES
Este trabalho realiza a determinação de parâmetros da
máquina síncrona de polos salientes através da utilização do
método dos elementos finitos. Comprovou-se que é possível a
modelagem por elementos finitos dos ensaios de curto circuito
brusco. A determinação de parâmetros usando métodos
numéricos utiliza as dimensões e características físicas da
máquina síncrona. A partir desses dados foi possível
V. REFERÊNCIAS BIBLIOGRÁFICAS
[1] I.M. Canay. Determination of model parameters of synchronous
machines. IEE Proceedings Electric Power Applications, 130(5), 86-94,
1983.
[2] E. Bortoni, J.A. Jardini. Synchronous machines parameters identification
using load rejection test data. IEEE Transactions on Energy Conv.,
17(2), 1997.
[3] F.P de Mello, J.R. Ribeiro. Derivation of Synchronous machine
parameters from tests. IEEE Trans. Power Apparat. Syst., 96(2), 12111218, 1977.
[4] I. Kamwa, P. Viarouge, R. Mahfoudi. Experience with Computer-Aided
Graphical Analysis of Sudden- Short-circuit Oscillograms of Large
Synchronous Machines. IEEE Transactions on Energy Conv., 10(3),
1995.
[5] IEEE Std115.
IEEE Guide for Test Procedures for Synchronous
Machines; Part I - Acceptance and Performance Testing; Part II - Test
Procedures and Parameter Determination for Dynamic Analysis. IEEE,
2009.
[6] IEC 34-4. Rotating electrical machines, Methods for determining
synchronous machine quantities from tests. may, 1998.
[7] J.P. Martin, C.E. Tindall, D.J. Morrow. Synchronous machine parameter
determination using the sudden short-circuit axis currents. IEEE
Transactions on Energy Conv., 14(3), 1999.
[8] J.P. Sturgess, M. Zhu, D.C. Macdonald. Finite-Element simulation of a
generator on load during and after a three-phase fault. 1992.
[9] P. Kundur. Power system stability and control. McGraw-Hill, USA,
1994.
[10] M. Tu Xuan, C. Ramirez, B. Kawkabani, J.J. Simond. Automatic
Determination of Laminated Salient-Pole Synchronous Machines
Parameters Based on the Finite Element Method. 1999.
[11] P.C. Krause, O. Wasynczuk, S.D. Sudhoff. Analysis of Electric
machinery and Drive Systems. 2002.
[12] R. Wamkeue, I. Kamwa, M. Chacha. Line-to-line Short-Circuit-Based
Finite-Element Performance and parameter Predictions of large
Hydrogenerators. IEEE Transactions on Energy Conv., 18(3), 2003.
[13] S.I. Nabeta, A. Foggia, J.L. Coulomb, G. Reyne. A Non-Linear TimeStepped Finite-Element Simulation of a Symmetrical Short-circuit in a
Synchronous Machine. 1995.
[14] S.J. Salon, T. H. Pham, P. Wendling, H. Tsai, A. Windhorn. Load Short
Circuit Transient Analysis of a Generator Using Flux2D With
Mechanical motion ans Electric Circuit Connections. Intell. Motion
Systems, 1996.
[15] J.C. Suni. Sobre a determinação de Parâmetros de Geradores Síncronos
para Estudos de Comportamento Dinâmico de Sistemas Elétricos. Tese
de doutorado - UNICAMP, 2009.
[16] Peter Vas. Parameter Estimation, Condition Monitoring, and Diagnosis
of Electrical Machines. Clarendon Press, Oxford UK, Second Edition
edition, 1993.
[17] K. Weeber. Determination of Dynamic Parameters of Large HydroGenerators by Finite-Element Simulation of Three-phase Sudden Shortcircuit Tests. 1997.
[18] MAXWELL2D User’s guide V12, 2009.
[19] SIMPLORER User’s guide V8, 2008.



![I) Os ensaios de um transformador monofásico de 10 [kVA], 2.200](http://s1.studylibpt.com/store/data/000932973_1-0b7ab7de6203df074f1655674d08071c-300x300.png)