40. SBAI- Simpósio Brasileiro de Automação Inteligente , São Paulo, SP, 08-10 de Setembro de 1999
MAPEAMENTO DE SINAIS RF DE TELEFONIA CELULAR
ATRAVÉS DE REDES NEURAIS DE BASE RADIAL
Paulo E. M. Almeida
[8]-
Paulo Tibúrcio Pereira
Departamento de Pesquisa e Pós-Graduação / CEFET-MG
Av. Amazonas, 7675 - Nova Gameleira - CEP : 30.510-000 - BH - MO - BRASIL
FAX: +55-(0)31-319-5212
e-mail [email protected]
Coordenação de Rádio Frequência do Interior - CDT 12 - TELEMIG CELULAR
Rua Levindo Lopes, 258 - 13°Andar - Savassi - CEP : 30.140-170 - BH - MG - BRAZIL
FAX : +55- (0)31-259-3541
e-mail [email protected]
questão, e são descritos os passos necessanos à
obtenção de resultados precisos e confiáveis.
ABSTRACT
In this work, it is proposed an engineering
solution, using the artificial neural networks theory,
to a very common problem at mobile telephony
medium. The RF levei mapping problem is shortly
described and some considerations about its
resolution are taken into account.
São mostrados os resultados obtidos com
dados de campo reais da Telemig Celular e é feita
uma análise final com propostas de melhoria da
solução encontrada.
PALAV RAS CHAVES
First, the growing boom of artificial
intelligence real applications is showed and some
architectures of neural networks are described. Then,
it is derived a solution to the above problem and the
steps needed to reach accurate and reliable results
are described.
Inteligência Artificial, Redes Neurais Artificiais,
Automação, Telefonia Móvel Celular.
1
iNTRODUÇÃO
A telefonia celular móvel se baseia na
transmissão da voz por ondas de rádio-freqüência
(RF), geradas pelas ERBs (estações rádio-base) da
operadora e recebidas nos aparelhos celulares
(estações móveis) dos clientes, e ondas geradas
pelos aparelhos e recebidas pelas ERBs. O termo
celular reflete a área de atuação de cada ERB, já que
os sinais de rádio emitidos perfazem uma célula em
volta da estação. A soma de todas as células do
sistema de telefonia compõe a área de cobertura do
serviço.
The results obtained with real field data from
Telemig Celular Company from Brazil are showed
and an final analysis is made, with enhancing
proposes to the presented solution.
KEYWORDS
Artificial Intelligence, Artificial Neural Networks,
Automation, Mobile telephony.
RESUMO
Freqüentemente, uma operadora de telefonia
móvel celular necessita de mapear os níveis de sinal
RF gerados pelas ERBs em sua área de cobertura, de
forma a proporcionar um serviço de qualidade ao
usuário e evitar problemas de ruído, interferências e
áreas com baixo nível de cobertura (comumente
chamadas de "sombras", nas quais podem ocorrer
cortes e / ou interrupções em uma ligação em curso).
Este processo se mostra trabalhoso e impreciso, já
que é necessária a medição em campo dos sinais
existentes e todo um trabalho de organização,
processamento e cruzamento dos dados adquiridos
para se obter o mapeamento de uma dada região na
área de cobertura. Além disto, as muitas limitações
Neste trabalho, é proposta uma solução de
engenharia que utiliza a teoria das redes neurais
artificiais para um problema muito comum na área
de telefonia celular. O problema de mapeamento de
nível dos sinais RF nas áreas de cobertura da rede
móvel celular é brevemente descrito, e são feitas
algumas considerações sobre a sua solução.
Inicialmente, é mostrado o grande aumento
de aplicações reais de inteligência artificial na
engenharia de um modo geral. São descritas algumas
arquiteturas de redes neurais artificiais (RNAs).
Depois, é derivada uma solução para o problema em
407
40. SBA I- Simpósio Brasileiro de Automação Inteligente, São Paulo , SP, 08-10 de Setembro de 1999
2
do equipamento utilizado e do próprio processo de
medição tornam este mapeamento problemático do
ponto de vista operacional , especialmente quando se
precisa analisar o comportamento do sistema em
grandes áreas.
MAPEAMENTO DE SINAIS RF DE
TELEFONIA MÓVEL CELULAR
A operação de mapeamento de níveis RF em
uma região da área de cobertura de uma operadora
de telefonia celular é realizada em duas etapas
distintas, a etapa de medição e a etapa de
processamento dos dados adquiridos . Como
qualquer outro processo de medição, este processo
requer equipamentos precisos que garantam a
minimização de erros de medida e rejeição de ruídos
espúrios, promovendo um mapeamento confiável e
determinístico.
Este trabalho propõe e implementa uma
solução para o ·problema de mapeamento de sinais
RF de telefonia celular, através da utilização de
redes neurais com função de ativação de base radial.
Esta arquitetura de redes neurais possui um
embasamento teórico preciso e bem estabelecido, já
que foi inspirada não por paradigmas biológicos mas
por modelos matemáticos para aproximação de
funções e ajuste de superfícies n-dimensionais
[Broomhead & Lowe, 1988, Poggio & Girosi, 1990].
O maior problema encontrado na etapa de
medição, na verdade, não se refere à qualidade do
equipamento em si, mas ao processo de medição
adotado. Este processo é realizado como descrito a
seguir. Com o equipamento de medição digital
instalado no interior de um veículo, a medição é
realizada a intervalos de amostragem fixos prédefinidos, enquanto o veículo se desloca de forma
aleatória pelas ruas ou vias existentes na área de
onde se quer levantar o mapa de nível RF da
cobertura. Obviamente, a velocidade e a direção do
veículo são variáveis aleatoriamente modificadas,
segundo as condições de tráfego e direcionamento
do fluxo de trânsito no momento de aquisição dos
dados. Resulta que os dados não são igualmente
espaçados com respeito ao posicionamento
geográfico e não representam de forma simétrica a
região delimitada para medição. Além disso, nas
áreas onde não existem vias de acesso adequado ao
veículo de medição (como o interior de quarteirões,
áreas de parques, lâminas d'água, fazendas, grandes
construções, etc.) não existem dados, o que
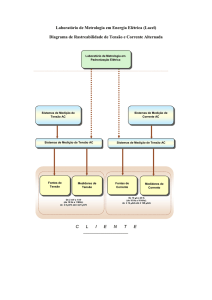
prejudica o processamento dos dados medidos . A
figura 1, a seguir, mostra um diagrama de medição
típico, obtido a partir de dados reais da Telemig
Celular, operadora de telefonia celular móvel de
quase todo o estado de Minas Gerais. Os círculos
mostram os pontos geográficos onde foi feita
efetivamente a medição, enquanto a área total do
gráfico corresponde à região onde se deseja o
mapeamento.
Ultimamente, tem crescido de forma
acentuada o número de aplicações de inteligência
artificial em geral. Em particular na área de
engenharia, nas aplicações onde os métodos
convencionais não se aplicam ou não fornecem
resultados satisfatórios, a utilização de soluções
alternativas através de várias ferramentas do campo
da inteligência artificial tem se mostrado bastante
útil. Paradigmas como redes neurais, lógica difusa,
algoritmos genéticos e teoria do caos, entre outros,
têm sido utilizados com sucesso para resolver uma
grande classe de problemas. É extensa e
multidisciplinar a bibliografia existente que reporta
esta tendência.
Especificamente falando de redes neurais, é
comum se encontrar aplicações na área de controle
de processos [Narendra & Parthasarathy, 1990, Nie
& Linkens, 1995, Jang et alli, 1997], onde uma rede
é normalmente utilizada como ferramenta de
modelamento não paramétrico de um sistema
dinâmico, na área de processamento de imagens e
sinais [Hopfield & Tank, 1985, Mousavi &
Schalkoff, 1994], quando se tenta encontrar soluções
sub-ótimas em tempo limitado para problemas
formulados como otimizações irrestritas, e na área
de aproximação de funções [Hornik et alli, 1989,
White, 1990], na tentativa de se obter resultados
aceitáveis na presença de dados imprecisos ou mal
condicionados, o que impossibilitaria a utilização
das técnicas convencionais .
.
Este artigo foi organizado como descrito a
seguir. A seção 2 tenta descrever o problema de
mapeamento de sinais RF e a seção 3 mostra
brevemente algumas arquiteturas de redes neurais
comumente utilizadas para o fim de aproximação de
funções. A seção 4 propõe uma solução para o
problema e mostra alguns resultados obtidos. Na
seção 5, finalmente, são analisados os resultados e
propostas outras formas de se solucionar o problema
e se obter melhores resultados.
Figura 1 : Mapa de medições de sinal RF em uma
região no estado de MG (fonte: Telemig Celular)
408
40. SBAI- Simpósio Brasile iro de Automação Inteligente, São Paulo, SP. 08-10 de Setembro de 1999
Como foi acima descr ito "e observado na
figur a I , o conjunto de dados obtido na etapa de
medição é incompleto e mal condicionado. Estas
características praticamente impossibilitam a
utilização de algum método oriundo "da teoria
convencional de aproximação (como urna regressão
múltipla ou urna interpolação polinomial, por
exemplo) para a obtenção de urna superfície que
represente de maneira aceitável a configuração de "
sinais RF existente na região medida. Pretende-se,
então , derivar um método alternativo que atenda às
restrições impostas pelo processo de medição e que,
ainda assim, forneça resultados aceitáveis para o
problema descrito .
3
REDES NEURAIS PARA
APROXIMAÇÃO E
INTERPOLAÇÃO
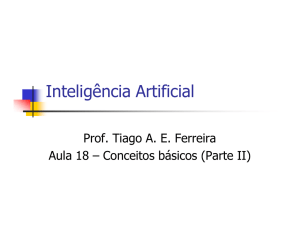
Uma rede MLP (do termo em inglês MultiLayer Perceptron) possui uma arquitetura geral
como a mostrada na figura 3, a seguir, onde todas as
saídas de neurônio de uma dada camada se conectam
a todos os neurônios da camada seguinte, através de
um dado peso. Nesta figura , cada quadrado
representa um neurônio de RHW como definido na
figura 2. O número de neurônios da camada de
entrada corresponde sempre ao tamanho do "vetor de
entrada X, o mesmo acontecendo com a camada e
saída com relação ao vetor de saída Y.
k=2
k=1
X X2
Y1
Y2
Xn
Ym
Xl
Assim, estas redes utilizam em sua maioria o
conceito fundamental do modelo simplificado de
neurônio de RHW [Rumme lhart et alli, 1986]
proposto na década de 80. Este modelo , mostrado na
figura 2, consiste de entradas conectadas através de
parâmetros de ponderação (chamados "pesos" das
conexões) e somadas em um elemento centralizador
não-linear, que implementa uma função adequada
dos valores de entrada.
r-----lil-:f=-
Redes Multicamadas de
Alimentação Positiva "(Redes
MLP) :
k=O
As redes neurais artificiais (RNAs) têm sido
"estudadas e utilizadas a mais de cinqüenta anos
desde que foi reportada a primeira aplicação por
McCulloch e Pitts, no final da década de 40. Uma "
das classes mais citadas na literatura aIlID. é a classe
de redes que trata de problemas de modelamento de
sistemas que possuem entrada e saída de dados.
Neste tipo de problema, as redes utilizadas devem
possuir parâmetros ajust áveis de forma a aproximar
o mapeamento exist ente nos conjuntos de dados de
entrada e saída do sistema em questão. Este ajuste
normalmente é realizado de maneira supervisionada,
através da utilização de um algoritmo de treinamen to
que encontra iterativamente um conjunto de
parâmetros adequado ao mapeamento desejado.
.
3.1
•
. Y
Figura 3 : Arquitetura geral de uma rede MLP
O algoritmo de treinamento mais comum
utilizado para o ajuste dos parâmetros da rede aos
conjuntos de dados de E / S de treinamento é
conhecido como "Aprendizado por retropropagação
do erro" (ou simplesmente errar backpropagation).
A sua utilização é tão comum que as redes MLP são
freqüentemente referenciadas na literatura por "redes
backpropagation ". A origem deste algoritmo
remonta à histórica "Regra Delta" para "treinamento
de neurônios lineares simples , proposta por Widrow
em 1962. A bibliografia sobre a sua derivação,
aspectos de convergência e limitações é vasta
[Rummelhart et alli, 1986, Zurada, 1992, etc.], não
sendo tratada neste trabalho.
Finalmente, as funções de ativação mais
utilizadas em redes do "tipo MLP são a sigm6ide,
g(x)
y=g(u)
1
= 1+e -x
(1)
a tangente hiperbólica
g(x) =
tanh( )
(2)
e a identidade,
Figura 2 : Modelo de Neurônio de RHW
g(x)=x
de acordo com a aplicação específica.
409
(3)
40. SBAI- Simpósio Brasileiro de Automação Intel igente, São Paulo, SP, 08-10 de Setembro de 1999
3.2
Redes de Alimentação Positiva
com Função de Ativação de
Base Radial (Redes RBF) :
4
A seguir, são mostrados e discutidos alguns
resultados obtidos através de simulações, em
computador, das arquiteturas mostradas na seção
anterior. Para a sua implementação , foi utilizada a
biblioteca de redes neurais do software Matlab ®
versão 5.0, da Mathworks Inc. Em todas as
simulações, foi utilizado um conjunto de
treinamento composto de aproximadamente 3.000
(três mil) pontos, coletados pela Telemig Celular. O
número de camadas em cada rede foi limitado a três,
e o número de neurônios na camada interna foi
obtido de forma empírica, através da análise do
desempenho de cada rede nas simulações.
Uma rede RBF (do termo em inglês Radial
Basis Function) possui basicamente a mesma
estrutura apresentada por 'uma rede MLP de três
camadas, à exceção das funções de ativação que são
definidas a priori para as camadas interna e de saída,
no caso RBF. Assim, a função de ativação de saída
será sempre a identidade, e a função de ativação da
camada interna será sempre do tipo gaussiana, ou
seja, da forma:
g (x ) =
exp[llx - m112 ]
20'2
IMPLEMENTAÇÃO E
RESULTADOS
(4)
Inicialmente, foi utilizada uma arquitetura
MLP
com
o
algoritmo
de
treinamento
backpropagation convencional. No entanto, o
algoritmo não conseguiu obter bons resultados. O
índice de erro quadrático desejado não pôde ser
alcançado, mesmo depois de várias passagens do
algoritmo pelo conjunto de treinamento dado. A
superfície resultante, quando comparada com os
pontos do conjunto de treinamento, se mostrou
claramente ineficiente. Este resultado ocorreu por
causa da natureza fortemente mal condicionada do
conjunto de dados de treinamento, coletados na
etapa de medição em campo, como foi discutido na
seção 2.
Este tipo de função de ativação implementa o
que é comumente chamado de um campo receptivo
para um dado neurônio. O nível de ativação em um
neurônio deste tipo é máximo quando a entrada x é
igual ao centro m do campo receptivo do neurônio.
Esta arquitetura é mostrada ' na figura 4, a seguir,
onde cada quadrado representa um neurônio com a
respectiva função de ativação representada em seu
interior.
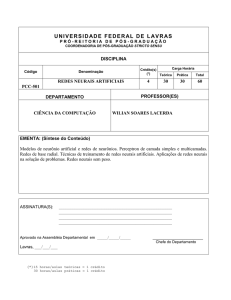
Por outro lado, a arquitetura RBF se mostrou
eficaz para a aproximação dos dados existentes, e
esta afirmação pode ser facilmente verificada através
do gráfico da superfície obtida por uma rede
composta por apenas 10 (dez) neurônio s de base
radial, mostrada na figura 5 a seguir.
É interessante salientar que os resultados
obtidos nesta fase inicial do estudo utilizaram apenas
algoritmos convenc ionais
e
implementações
simplificadas das arquiteturas descritas na seção 3.
A utilização de algoritmos alternativos para a
inicialização dos parâmetros da rede RBF, baseados
em aspectos heurísticos do conjunto de treinamento
[Moody & Darken, 1989] ou em técnicas de
generalização da rede para se evitar o problema de
mal condicionamento dos dados de entrada [Musavi
et alli, 1992] podem produzir melhoras significativas
nos resultados obtidos.
Figura 4 : Arquitetura em três camadas de uma
rede RBF
Quando é usado um neurônio para 'cada vetor
de entrada do conjunto de treinamento, diz-se que a
rede resultante realiza .uma. interpolação destes
pontos. Isto significa que o erro na saída será nulo
para qualquer entrada igual a um dos pontos do
conjunto de treinamento . Por outro lado, uma rede
estará realizando uma aproximação da função
geradora do conjunto de treinamento se o número de
neurônios for menor ou maior-que o número de
pontos deste conjunto .
Por outro lado, do ponto de vista da
modelagem do problema original, uma segunda
etapa deste trabalho propõe a utilização de lógica
difusa como uma técnica auxiliar na obtenção da
superfície de mapeamento desejada. Como se
poderia esperar, a atenuação dos sinais RF não é
completamente uniforme em qualquer tipo de
cenário existente. A Telemig Celular possui
inclusive dados, calculados a partir das medições
feitas em campo, que mostram esta variação de
atenuação dos sinais. A tabela 1, a seguir, lista os
A capacidade ' de aproximação e de
interpolação de uma rede RBF pode ser grandemente
aumentada através de ajustes adequados nos centros
e no formato dos campos receptivos dos neurônios
que a compõem. Vários algoritmos de aprendizado
foram propostos e implementados neste sentido, de
forma a identificar os parâmetros ótimos para um
dado conjunto de treinamento. Maiores informações
sobre tais algoritmos podem ser encontrados em
[Moody & Darken, 1989].
410
40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08 -10 de Setembro de 1999
-40
-60
-80
-100
-120
-140
-1 60
42 .9
20.78
Figura 5 : Super fície aproximada de níveis de sinal RF, obtida por uma rede RBF (em dBm)
figura 6 mostra um diagrama esquemático da técnica
aqui proposta, que deve ser implementada na
continuidade deste trabalho.
tipos de cenário considerados e as atenuações
correspondentes.
Tabela 1 : Atenuação de sinais RF segundo o
cenário existente na á rea de medição
CENÁlUO
Água (visada livre)
Dados
Qualitalivos
Aten uação (dB/dec)
I
- 20,0
Rural
- 43,5
Suburbano
- 41,3
Urbano
- 35,1
Superurbano
- 34,6
Dados de
Medição
A idéia básica da técnica a ser desenvolvida é
a utilização de uma máquina de inferência difusa
como uma segunda entrada para a rede neural de
aproximação. Este sistema difuso vai determinar de
maneira qualitativa as correções que devem ser
feitas na superfície obtida pela rede, de acordo com
o tipo de cenário existente, a sua extensão, etc.
Assim, o sistema híbrido resultante vai combinar o
potencial de aproximação e generalização inerente
das redes neurais com a capacidade de
processamento de dados imprecisos dos sistemas
difusos em geral.
Sistema
Difuso
Aju ste
-
100
Rede Neural pl
Aproxim ação
Mapeame nto
RF
L
)
•
Figura 6 : Diagrama em blocos da ferramenta
completa de IA para mapeamento de sinais RF de
telefonia celular móvel
5 .CONCLUSÃO
Foi descrito o problema de mapeamento de
sinais RF nas áreas de cobertura de telefonia móvel
celular, vivenciado atualmente pelas operadoras
telefônicas em geral. Foi feita uma análise do
problema e proposta uma solução de engenharia
baseada no paradigma de redes neurais artificiais.
Pretende-se, com a implementação desta
técnica, a obtenção de mapeamentos mais precisos e
. condizentes com a realidade medida em campo. A
Na seção 3, foram brevemente descritas
algumas arquiteturas de RNAs adequadas à
411
40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08·10 de Setembro de 1999
resolução do problema de aproximação de funções
de várias variáveis. A ·escolha da arquitetura RBF
utilizada foi mostrada e justificada com base na
natureza dos dados existentes.
units", Neural Computation, V.l , pp . 281294,1989.
MOUSAVI, M. S. & SCHALKOFF, R. J. "ANN
Implementation of Stereo Vision using a
Multilayer Feedb ack Architecture", IEEE
Trans. On SMC , V.24, No.8, pp. 1220-1238,
1994.
Os resultados apresentados são de certa
forma conservadores, do ponto de vista do ajuste
completo ao conjunto de pontos existentes. Por se
tratar de um estágio inicial do estudo e do pouco
tempo gasto para se chegar ao ponto atual, acreditase que, com a execução de mais simulações, pode-se
chegar a resultados mais satisfatórios e definitivos
para uma solução adequada do problema de
engenharia existente. A inserção de ferramentas
auxiliares que facilitem
os processos de
convergência e inicialização dos parâmetros da rede
de base radial pode ser o próximo passo para se
alcançar a precisão desejada. No entanto, esta etapa
do trabalho está fora dos propósitos deste artigo.
MUSAVI, M. T. et alli. "On lhe Training of Radial
Classifiers",
Neural
Basis
Function
Networks, V.5, N A, pp. 595-603, 1992.
NARENDRA, K. S. & PARTHASARATHY, K.
"Identification and Control of Dynamical
Systems using Neural Networks", IEEE
Trans. on Neural Networks, V.l, No.I, pp . 427,1990.
Finalmente, foi feita uma proposta concreta
de melhoria dos resultados obtidos, através da
utilização de lógica difusa para representação
qualitativa do comportamento dos sinais RF nos
pontos onde é .impossivel se fazer medições. Uma
abordagem como esta vai com certeza minimizar as
imprecisões existentes e garantir a obtenção da .
solução desejada.
AGRADECIMENTOS
Os autores gostariam de expressar o seu
agradecimento pelo suporte financeiro da FINEP
através do programa RECOPE, sub-rede de.
Inteligência Artificial, bem como peja contribuição
da Telemig Celular, através da cessão de utilização
de dados reservados, que permitiram a realização
. deste trabalho .
NIE , J. & LINKENS , D. Fuzzy-Neural ContraI:
Principies. AIgorilhms and Applications,
Prentice-Hall Europe, 1995.
POGGIO, T. & GIROSI, F. "Networks and lhe Best
Property",
Biological
Approximation
Cybemetics, V.63, pp. 169-176, 1990.
RUMELHART, D. E.,
WILLIAMS, R.
Representations by
ParalIeI Distributed
Press, 1986.
HINTON, G . E. &
J. "Leamin g Intern aI
Error Propagation", in
Processing, Vol.l , MIT
WHITE,
H.
"Connectionist
Nonparametric
Regression
Multilayer Feedforward
Networks Can Lcarn Arbitrary Mappings" ,
Neural Networks, V.3, pp. 551-560, 1990.
ZURADA, J. M. Introduction to Artificial Neural
Systems. PWS Publishing Company, 1995.
REFERÊNCIAS BIBLIOGRÁFICAS
BROOMHEAD, D. S. & LOWE, D. "Multivariable
Functional Interpolation and Adaptive
Networks", Complex Systems, V.2, pp. 321355,1988.
DEMUTH, H & BEALE, M. "Neural Networks
Toolbox For Use wilh MATLAB®", The
Malhworks Inc. , 1998.
HORNIK, K. et alli. "Multilayer Feedforward .
Networks are Universal Approximators",
Neural Networks, V.2 , pp. 359-366,1989.
JANG, J-S . R. et alli. Neuro-Fuzzy and Soft
Computing : A Computational Approach to
Learning and Machine InteIligence. PrenticeHall,I997.
MOODY, J. & DARKEN, C. "Fast Lcarning in
Networks of LocaIIy Tuned Processing
412