Tese de Doutorado
Formação de Padrões em Meios Granulares Densos
Autor: Hélio Fernando Verona de Resende
Orientador:Prof. Dr. Américo Tristão Bernardes
Dezembro de 2008
ii
ii
Formação de Padrões em Meios Granulares Densos
Hélio Fernando Verona de Resende
Tese de doutorado apresentada ao Programa de
Pós- Graduação em Engenharia de Materiais da
REDEMAT, como parte integrante dos requisitos
para obtenção do título de Doutor em Engenharia
de Materiais.
Área de concentração: Análise e Seleção de Materiais
Orientador: Prof. Dr. Américo Tristão Bernardes
Ouro Preto, dezembro de 2008
ii
ii
ii
Resumo
Os sistemas granulares são conhecidos por apresentarem um comportamento em certos aspectos
comparável aos observados nos fluidos e alguns outros aos observados em sólidos como, por exemplo,
a formação de padrões e a segregação de partículas. Neste trabalho, realizamos simulação em larga
escala e obtemos padrões observados experimentalmente na injeção de grãos de diferentes tamanhos
numa célula de Hele-Shaw. Na simulação utilizamos um modelo de Automata Celular Probabilístico
de Gás de Rede (PLGA) definido numa rede triangular bi-dimensional e observamos que a formação
dos padrões está relacionada tanto com o tamanho dos grãos injetados, quanto com a probabilidade
de movimento desses grãos.
Dos resultados da simulação, fomos capazes de propor um modelo teórico simples para o fenômeno, que é produzido pelas altas tensões impostas pela fricção entre os grãos e entre estes e a célula.
Como pode ser visto ao longo desse trabalho, com esse modelo teórico, fomos capazes de predizer
a dimensão fractal dos padrões formados e mostrar que ela está de acordo com os modelos de DLA
(diffusion-limited aggregation). Recentemente, foi comprovado experimentalmente a dimensão fractal prevista por nosso modelo, num experimento que se obtém padrões formados por esferas de vidros
dispostas entre as placas da célula de Helle-Shaw.
ii
iii
Abstract
Granular systems are known to present dynamical behavior which can be compared with that
of fluids or that observed in solids. Pattern formation and segregation are some of the observable
phenomena. In this work, we perform large scale simulations to obtain numerically the major features
observed in grain-grain invasion experiment. A probabilistic lattice gas automata (PLGA) was used
as model. Defined on a 2-dimensional triangular lattice, we observed that the patterns formed depends
on the type of introduced grains, as well as on the probabilities of movement.
From the results of these simulations, we were able to propose a theoretical framework for the
phenomenon, which is produced by the high stress gradient regime imposed by friction between the
grains and/or the plates. By means of such model, we obtain the fractal dimension of the patterns,
which approaches the exponent characteristic of DLA (diffusion-limited aggregation). Recently, it
was found, in an experiment with glass balls in a Helle-Shaw cells, a fractal dimension similar to that
previously predict by our model.
iii
iv
Agradecimentos
Agradeço ao Prof. Dr. Américo Tristão Bernardes, quem mais contribuiu para a realização deste
trabalho e para aprimorar minha formação como pesquisador. Sou muitíssimo grato por incentivarme a retomar as pesquisas, pela orientação sempre segura, por mostrar-me os vários caminhos e
possibilidades, pela paciência e preocupação para comigo e, principalmente, pelo grande exemplo de
seriedade e profissionalismo.
Agradeço a minha esposa Selma pelo apoio, pela compreensão e carinho ao longo de todo esse
tempo juntos. Aos meus filhos Felipe e Vinícius pela compreensão que tiveram, apesar da pouca
idade. E por todo o tempo, deles por direito, que foi redirecionado para a realização desse trabalho.
À Edina e Paulo por cederem-me um espaço silencioso e aconchegante aos finais de semana, para
que esse trabalho não perdesse continuidade.
À Profa Maria Auxiliadora, quem primeiro incentivou a dar início a esse trabalho, pela amizade e
companheirismo no rally do dia a dia.
Aos professores Romuel e Boselli pela amizade, pelas inúmeras discussões sobre Física, pelas
dicas sobre FORTRAN e pela valiosa ajuda com o sistema Linux.
Ao Prof. Alcides pela valiosa dica de Fractal Box Counting, pelas dicas sobre o sistema Linux e
pela figura gentilmente cedida.
Aos professores Fernando Gabriel e André Cota pela grande ajuda, enquanto coodenadores da
REDEMAT.
A todos os professores do Departamento de Física pela oportunidade gerada ao absorverem inicialmente parte, e no decorrer desse ano, a totalidade de minhas atividades didáticas.
Ao grupo de sistemas complexos da UFV pelo experimento que gerou esse trabalho.
À REDEMAT pela oportunidade.
À CAPES e FAPEMIG pelo financiamento.
Ao Hard e Lippy (ambos in memoriam), ao Maguila, Popeye, Grauna, Asterix, Obelix, Megatron
e Bibopai pela longa companhia durante as simulações.
E finalmente, a todos que direta ou indiretamente contribuiram para a realização desse trabalho.
iv
v
À minha esposa Selma,
aos meus filhos Felipe e Vinícius
e à minha mãe Edina
v
vi
vi
Sumário
Lista de Figuras
ix
1
Introdução
1
2
Sistemas Granulares
2.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Propriedades dos Sistemas Granulares . . . . . . . . . . . . . . . . . .
2.2.1 Pilhas - Avalanches - Estratificação . . . . . . . . . . . . . . . .
2.2.2 Empacotamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.3 Vibração - Segregação . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.4 Formação de Padrões na Superfície dos Meios Granulares .
3
3
4
5
Fractais
3.1 Introdução . . . . . . . . . . . . . . . . .
3.2 Geometria Fractal . . . . . . . . . . . .
3.2.1 Dimensão Fractal - Definição
3.2.2 Fractais Auto-afins . . . . . . .
.
.
.
.
.
.
3
4
4
8
9
13
19
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Metodologia - Automata Celulares
4.1 Introdução . . . . . . . . . . . . . . . . . . . . . .
4.2 Automata Celulares . . . . . . . . . . . . . . . .
4.2.1 Introdução . . . . . . . . . . . . . . . . . .
4.2.2 Definição . . . . . . . . . . . . . . . . . . .
4.2.3 Automata Celulares Determinísticos
4.2.4 Automata Celulares Probabilísticos .
4.2.5 Automata Celulares de Gás de Rede .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
19
20
21
22
25
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
25
25
25
26
26
28
29
Padrões em Meios Granulares Densos - Dados Experimentais
33
5.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.2 Célula de Hele-Shaw . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
vii
viii
SUMÁRIO
5.3
5.4
6
7
Montagem Experimental . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Resultados Experimentais . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Simulação Numérica de Padrões Em Meios Granulares Densos
6.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 O Modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 Resultados com monocamada inicial de discos grandes .
6.3.2 Resultados com monocamada inicial de discos pequenos
6.4 Dimensão Fractal e Raio de Giração dos padrões . . . . . . . . .
6.4.1 Cálculo da Dimensão fractal . . . . . . . . . . . . . . . . . .
6.4.2 Cálculo do Raio de Giração . . . . . . . . . . . . . . . . . . .
34
36
45
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
45
45
47
47
52
64
64
69
Conclusão
73
A Apêndice A: Programa para gerar os padrões. Linguagem FORTRAN
90.
83
B Apêndice B: Artigo Publicado
105
viii
Lista de Figuras
2.1
2.2
2.3
2.4
2.5
2.6
Pilha de Areia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modelo de Automata Celulares para a estratificação de material granular . . . . . . .
Segregação por diferença de tamanho - Efeito “Castanha do Para” . . . . . . . . . .
Esquema mostrando a convecção de partículas em recipientes de formatos diferentes
Padrões formados para N=8 e fext =67Hz. . . . . . . . . . . . . . . . . . . . . . . .
A formação de aglomerados em 2-d devido a colisão inelástica . . . . . . . . . . . .
5
7
11
12
14
16
3.1
3.2
Estrutura Fractal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Função de Weierstrass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
23
4.1
4.2
Representação gráfica do modelo Tetris . . . . . . . . . . . . . . . . . . . . . . . .
Representação gráfica do modelo Petri e Oliveira . . . . . . . . . . . . . . . . . . .
31
32
5.1
5.2
5.3
5.4
5.5
5.6
5.7
5.8
5.9
Célula de Helle-Shaw . . . . . . . . . . . . . . .
Monocamada inicial com esferas de plástico . . . .
Padrões Regulares . . . . . . . . . . . . . . . . . .
Padrões Irregulares . . . . . . . . . . . . . . . . .
Diagrama morfológico representativo dos padrões.
Transformada de Fourier dos Padrões. . . . . . . .
Raio de Giração e Borda do Padrão. . . . . . . . .
Número de partículas na borda do padrão. . . . . .
Orientação das esferas formando um padrão. . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
34
35
37
38
39
40
41
41
43
6.1
6.2
6.3
6.4
6.5
6.6
6.7
6.8
6.9
Rede triangular. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Colisão entre discos pequenos. . . . . . . . . . . . . . . . . . . . . . . . . . .
Colisão entre discos grandes. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Colisão entre discos grandes e discos pequenos. . . . . . . . . . . . . . . . . .
Simulação de discos pequenos em um substrato com discos grandes (ppg =83%).
Simulação de discos pequenos em um substrato com discos grandes (ppg =33%).
Simulação de discos pequenos em um substrato com discos grandes (ppg =17%).
Simulação de discos pequenos em um substrato com discos grandes (pv =17%).
Simulação de discos pequenos em um substrato com discos grandes (pv =83%).
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
46
47
48
48
50
50
51
51
52
ix
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
x
LISTA DE FIGURAS
6.10
6.11
6.12
6.13
6.14
6.15
6.16
6.17
6.18
6.19
6.20
6.21
6.22
6.23
6.24
6.25
6.26
6.27
6.28
6.29
6.30
6.31
6.32
6.33
6.34
6.35
6.36
6.37
6.38
6.39
Simulação de discos pequenos em um substrato com discos grandes (ppg =17%). . . .
Simulação de discos pequenos em um substrato com discos grandes (ppg =83%). . . .
Simulação de discos pequenos pp1 =67% e ppg =17%. . . . . . . . . . . . . . . . . . .
Simulação de discos pequenos pp1 =67% e ppg =83%. . . . . . . . . . . . . . . . . . .
Regras de movimento na rede. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Simulação de discos grandes em um substrato com discos pequenos. . . . . . . . . .
Simulação de discos grandes sem um substrato com discos pequenos. . . . . . . . .
Padrão em uma rede L=311x311. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Padrão irregularcom pontas em uma rede L=311x311. . . . . . . . . . . . . . . . . .
Padrão de seis pontas em uma rede L=311x311. . . . . . . . . . . . . . . . . . . . .
Padrão em uma rede L=311x311 com 3000 discos grandes. . . . . . . . . . . . . . .
Padrão em uma rede L=1111x1111 com 10000 discos grandes. . . . . . . . . . . . .
Padrão em uma rede L=1111x1111 com 10000 discos grandes. . . . . . . . . . . . .
Padrão em uma rede L=1111x1111 com 10000 discos grandes. . . . . . . . . . . . .
Padrão em uma rede L=1111x1111 com 20000 discos grandes. . . . . . . . . . . . .
Padrão em uma rede L=1111x1111 com 20000 discos grandes. . . . . . . . . . . . .
Diagrama morfológico obtido por simulação numérica. . . . . . . . . . . . . . . . .
Gráfico ln(N(r)) versus ln(r) para uma rede L=1111x1111 com 10000 discos grandes.
Gráfico ln(N(r)) versus ln(r) para uma rede L=1111x1111 com 10000 discos grandes.
Gráfico ln(N(r)) versus ln(r) para uma rede L=1111x1111 com 10000 discos grandes.
Gráfico ln(N(r)) versus ln(r) para uma rede L=1111x1111 com 20000 discos grandes.
Gráfico ln(N(r)) versus ln(r) para uma rede L=1111x1111 com 20000 discos grandes.
Gráfico ln(N(r)) versus ln(r) para uma rede L=311x311 com 900 discos grandes. . .
Gráfico ln(N(r)) versus ln(r) para uma rede L=311x311 com 900 discos grandes. . .
Gráfico ln(N(r)) versus ln(r) para uma rede L=311x311 com 900 discos gandes. . . .
Gráfico ln(Rg (N)) versus ln(N) para uma rede L=1111x1111 com 10000 discos grandes.
Gráfico ln(Rg (N)) versus ln(N) para uma rede L=1111x1111 com 10000 discos grandes.
Gráfico ln(Rg (N)) versus ln(N) para uma rede L=1111x1111 com 10000 discos grandes.
Gráfico ln(Rg (N)) versus ln(N) para uma rede L=1111x1111 com 20000 discos grandes.
Gráfico ln(Rg (N)) versus ln(N) para uma rede L=1111x1111 com 20000 discos grandes.
x
53
53
54
54
55
56
57
58
58
59
59
60
60
61
62
62
63
65
65
66
67
67
68
68
69
70
71
71
72
72
Capítulo 1
Introdução
Todos nós já nos deparamos com meios granulares, como areia, pós e grãos. Seja numa caixa de
areia, quando deixamos a areia escorrer por entre os dedos, ou na praia quando tentamos construir
castelos de areia e parte dele desaba em uma pequena avalanche. Ou mesmo quando despejamos açúcar em uma lata e damos pequenas pancadas na sua lateral com o intuito de fazer com que o açúcar se
compacte, para caber sempre um pouco mais. O comportamento exótico de certas propriedades dos
sistemas granulares faz com que estes constituam um estado da matéria entre fluidos e sólidos. Eles
podem fluir quando são colocados a vibrar ou podem formar pilhas indicando uma tensão de cisalhamento estática diferente de zero, que é uma característica dos sólidos. Os fundamentos das teorias
existentes para os sistemas granulares está, sob o ponto de vista da mecânica estatística moderna, em
aberto, o que os torna um campo atrativo, principalmente se levarmos em conta que estas teorias não
são aplicáveis à maioria dos sistemas reais nos quais os sistemas granulares mudam suas densidades
espontaneamente.
Recentemente, os sistemas granulares se tornaram novamente o foco de interesse dos pesquisadores [1, 2, 3, 4, 5, 6, 7, 8] (já que no século XIX haviam fascinado pessoas como Michael Faraday, Osborne Reynolds e Gotthilf Hagen): a utilização de modernos computadores tornou possível
compreender melhor suas propriedades possibilitando o desenvolvimento de materiais novos e mais
avançados. Modelos de avalanches e intermitência foram desenvolvidos por diversos pesquisadores
estimulados pelo modelo de pilha de areia. O uso de computadores tornou possível simular - via
Dinâmica Molecular - trajetórias de milhões de grãos, permitindo o estudo de fenômenos coletivos.
Assim, podemos calcular a trajetória de cada grão durante um intervalo de tempo realístico e investigar o comportamento simultâneo de até milhares de grãos, utilizando leis de forças simplificadas
para descrever as interações entre eles. Alguns fenômenos como a emergência de grãos de grande
tamanho dentro de recipientes com grãos pequenos, a formação de ondas de densidade em canos,
estratificação e segregação de grãos de diferentes tipos já estão bem compreendidos e descritos. Um
exemplo de segregação pode ser visto quando se mistura aleatoriamente em um copo alguns grãos de
arroz e de feijão, ambos não cozidos. Se submetermos nosso sistema (copo + arroz + feijão) a um tipo
de vibração, por exemplo dando tapas na lateral do copo, notaremos que o arroz e o feijão começam a
1
Introdução
2
se separar. Continuando com os tapas, verificaremos que o arroz irá se situar predominantemente no
fundo do copo, ao passo que o feijão se situará na parte superior do copo. Tal segregação se dá, não
devido às diferentes densidades entre os dois meios granulares, mas, aparentemente, somente devido
ao fato de os grãos de feijão terem uma granulometria maior que os grãos de arroz.
Estudos recentes com tipos diferentes de grãos de arroz mostraram que as avalanches que ocorrem
nas pilhas de arroz de um determinado tipo de grão (mais pontiagudos) apresentam características de
criticalidade auto-organizada onde a probabilidade de ocasionar avalanches de determinado tamanho
é proporcional ao tamanho da avalanche elevado a um expoente -α, com α ligeiramente maior que
2, ao passo que para outros tipos de grãos (mais esféricos) a probabilidade varia exponencialmente
existindo assim um tamanho típico de avalanche.
Os materiais granulares são comuns no nosso cotidiano. Eles são encontrados em ingredientes alimentares (açúcar, café, arroz, cereais, etc), cápsulas de medicamentos e pílulas, pós faciais, materiais
de construção (areias, britas, cimento). Na engenharia, o estudo dos meios granulares pode conduzir
a um melhor entendimento de problemas que podem ocorrer durante empilhamento de minérios nos
pátios, transportes em correias transportadoras e veículos, etc.
Um sistema granular rarefeito, algumas vezes dito gases granulares ou líquidos granulares, uma
vez que o comportamento do material é dominado por colisões entre partículas devido à vibrações,
é modelado com razoável sucesso utilizando teoria cinética. Neste caso, são as flutuações nas velocidades dos grãos que determinam as quantidades físicas dos sistemas [9]. Entretanto, uma teoria
quantitativa para materiais granulares densos está longe de um desenvolvimento pleno [10]. Um meio
granular é dito denso, quando os grãos possuem interações de longo alcance, isto é, o sistema é dominado por um contato prolongado entre os grãos. Nesse caso, as forças de contatos entre os grãos
se propagam em estruturas filamentares conhecidas como cadeias de tensão e podem ter correlações
espaciais de longo alcance. Tais correlações provocam alterações nas propriedades do material como
um todo, tais como, consequências para a propagação do som, propagação das forças e das tensões,
o amontoamento dos grãos e efeitos de memória [11, 12]. Caso os grãos dos sistemas densos se
deformem, essas cadeias de tensão podem se modificar e provocar grandes flutuações nas forças do
sistema, influenciando o tensor deformação. Em geral, essa flutuações não são fáceis de serem caracterizadas e não se pode prevers seus impactos no comportamento macroscópico do sistema. Nos
últimos anos, consideráveis esforços têm sido feitos no sentido de tentar esclarecer o processo de
propagação das tensões ao longo dos meios granulares densos.
A formação de padrões em meios granulares tem ganho a atenção de vários pesquisadores, como
veremos mais adiante. A formação de padrões se dá devido à vibração e/ou rotação dos meios granulares e também devido à inserção de grãos de um determinado tamanho médio em meio composto
por grãos cujo tamanho médio seja diferente do inserido.
Nesse trabalho estamos interessados em reproduzir e entendermos melhor a formação de padrões
nos meios granulares densos. Para isso, desenvolvemos modelos teóricos computacionais que simulam os comportamentos experimentais observados para um determinado sistema granular.
2
Capítulo 2
Sistemas Granulares
2.1 Introdução
A fim de entendermos a formação de padrões em meios granulares torna-se necessário conhecermos um pouco do que está sendo desenvolvido sobre esses sistemas. Quando os sistemas granulares
são formados por grãos não coesivos, as forças entre os grãos são somente forças de repulsão, de tal
modo que a forma do material é determinada pelas condições externas (por exemplo, a forma do recipiente) e a força de gravidade. Se os grãos são secos, qualquer fluido intersticial, tal como o ar, pode
ser desprezado no estudo das propriedades estáticas e de fluidos do sistema. Os sistemas granulares
comportam-se diferentemente de qualquer outro estado da matéria conhecido (sólido, líqüido e gás)
e, por isso, até poderia ser considerado um outro estado da matéria.
Existem dois aspectos importantes que contribuem para esse comportamento diferenciado dos
sistemas granulares: Primeiro é com relação à temperatura ambiente. Ela não tem tanta importância nesses sistemas quanto tem, por exemplo, no estudo dos gases. Outro aspecto é com relação à
interação entre os grãos. Essa interação se dá de modo dissipativo, pois as colisões entre os grãos
são inelásticas. A princípio somos tentados a pensar num fluxo de grãos como se fossem gases bem
densos, uma vez que esse também é formado por partículas discretas sem forças de coesão entre
elas. Entretanto, no caso dos sistemas granulares, a escala de energia kB T, onde kB é a constante de
Boltzmann e T a temperatura, é insignificante, uma vez que a energia relevante é a potencial mgd de
um grão de massa m e diâmetro d caindo com aceleração da gravidade g. Essa energia é cerca de
1012 vezes a energia kB T de um grão de areia à temperatura ambiente, o que torna os argumentos da
termodinâmica sem utilidade nesse caso.
Muitos estudos [13, 14, 15] têm mostrado que, quando os sistemas granulares entram em vibração
ou rotação, grãos de diferentes tamanhos são induzidos a se separarem em diferentes regiões do
recipiente. Como não existem forças de coesão entre os grãos, essa separação parece à primeira
vista violar a Segunda Lei da Termodinâmica, uma vez que se esperaria que os grãos se misturassem.
Assim, o fato de a energia térmica dos grãos ser desprezível mostra que considerações de entropia
devem ser substituídas por considerações dinâmicas. Outro fator importante é que em gases, a escala
3
Sistemas Granulares
4
de velocidades microscópicas está relacionada com a temperatura. Nos sistemas granulares, a escala
de velocidade é imposta pela própria velocidade do fluxo dos grãos. Alguns autores [14, 16, 17]
utilizam uma temperatura granular efetiva definida em termos da flutuação das velocidades em torno
da velocidade média do fluxo. Entretanto, essa aproximação nem sempre resgata a termodinâmica
devido a natureza inelástica das colisões.
2.2 Propriedades dos Sistemas Granulares
Em seguida, vamos mostrar algumas das propriedades características dos sistemas granulares que
são diferentes daquelas normalmente associadas aos sólidos, líquidos e gases e quais são as pesquisas
desenvolvidas mais recentemente nessa área.
2.2.1
Pilhas - Avalanches - Estratificação
Diferentemente dos fluidos, a superfície de um meio granular em repouso sobre uma superfície
horizontal não é plana, mas pode mostrar ondulações (dunas, ondas) ou formar montes (como as
pilhas de areia). Isto é devido ao fato de que acima de um ângulo máximo, chamado ângulo de
máxima estabilidade θm , os grãos podem se arranjar de um modo estatisticamente estável (figura
2.1(a)). As avalanches podem ocorrer espontaneamente quando a inclinação do material granular
excede um certo ângulo crítico, ou podem ter início a ângulos menores que o crítico, quando se
aplicam pequenas perturbações nos meios granulares. Em experimentos reais, quando se constrói
uma pilha de areia depositando os grãos lentamente, em determinado momento a superfície livre
atinge uma inclinação que a torna instável. A partir daí, a adição de novos grãos provoca avalanches
(fluxos de grãos) que tendem a manter, em média, o ângulo de inclinação em torno de seu valor
crítico que é mantido mais ou menos constante. As avalanches podem se dar numa fina camada da
superfície da pilha ou mover um grande volume da própria pilha. No entanto, uma distribuição tipo
lei de potência para os tamanhos de avalanches é muito difícil de se verificar devido ao tamanho dos
grãos.
Herrmann [7] propôs um modelo teórico simples que permite calcular o ângulo de inclinação
crítico com sucesso e que mostra também o comportamento logaritmo do perfil (superfície) da pilha
(equação 2.1). Neste modelo, quando grãos de areia são abandonados de uma determinada altura
sobre uma superfície horizontal, a superfície da pilha de grãos de areia, após estes entrarem em
repouso, pode ser descrita pela equação:
x=
hm − y
hm
+ u ln( ),
tg(θ)
y
(2.1)
onde hm é a altura do cume da pilha, x é a posição horizontal da superfície da pilha com a origem
no centro da pilha (x(hm )=0), y é a posição vertical (altura) de um determinado grão da superfície da
4
2.2 Propriedades dos Sistemas Granulares
5
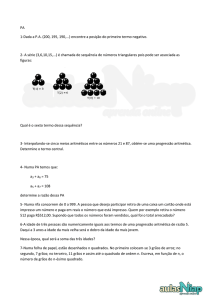
Fig. 2.1: (a) Inclinação de uma Pilha de Areia - Ângulo Crítico; (b) Perfil de uma Pilha de Areia
mostrando a origem do sistema de coordenadas.
δ
pilha, θ é a inclinação da tangente passando por este grão e paralela à inclinação da pilha e u= rsen(θ)
,
onde δ é o diâmetro médio dos grãos e r a taxa de agregação dos grãos de areia, suposta constante.
O primeiro termo à direita da equação 2.1 representa uma reta com inclinação θ e o segundo termo
representa o perfil da superfície sobre a reta e devido aos degraus formados pelo grãos que compõem
a superfície (figura 2.1(b)). Como os grãos de areia são em geral muito pequenos, outros tipos de
grãos podem ser selecionados para se estudar outros comportamentos das avalanches. O comportamento de avalanches formadas por grãos de arroz, e não de areia, foi estudado por Frette et al. [18].
Nesse caso, os grãos de arroz, por suas dimensões, são mais apropriados para a seleção individual. O
objetivo era procurar uma realização experimental de criticalidade auto-organizada. Os resultados
mostraram que, para determinados tipos de grãos (mais alongados, polidos ou não), existe um ajustamento interno para a pilha estar sempre próxima do equilíbrio e sempre perto de romper o precário
balanço de forças. Esse tipo de equilíbrio chama-se criticalidade auto-organizada. Para que ocorra a
criticalidade auto-organizada, é necessário que além de existir um reajustamento interno que mantém
a iminência do deslizamento, ocorram avalanches de todos os ’tamanhos’. Matematicamente, temos
que a probabilidade de ocorrência de uma avalanche de um dado tamanho varia, em função do tamanho, como uma lei de potência, inexistindo, portanto, um tamanho típico ou médio de avalanche. Os
autores mostraram que a probabilidade P(ε) de ocorrer uma avalanche de tamanho ε (definida como
a distância vertical percorrida por cada grão no decorrer da avalanche, ou seja, a energia média total
ε dissipada no campo gravitacional terrestre entre a situação inicial e a final) é dada por:
P (ε) ∝ ε−α ,
(2.2)
onde o expoente α é ligeiramente maior que 2. No entanto, para o caso de grãos mais redondos
(esféricos) os resultados mostram uma distribuição variando exponencialmente. No caso desses grãos
mais esféricos existe, portanto, um tamanho típico de avalanche. Fisicamente, a diferença provém do
fato de que os grãos esféricos tendem a rolar uns sobre os outros, ao passo que os alongados (polidos
ou não) necessitam deslizar para se moverem, dissipando energia devido ao atrito a cada momento,
o que mantém a pilha sempre no estado crítico. Convém ressaltar que, nesse caso, esses fluxos de
grãos nada têm de semelhante ao fluxo de um fluido comum, uma vez que o fluxo se dá somente na
superfície da pilha e não há movimento da pilha como um todo, isto é, os grãos do interior da pilha
5
Sistemas Granulares
6
permanecem em repouso.
Durante uma avalanche numa pilha de areia, por exemplo, onde os grãos não possuem todos as
mesmas dimensões, pode ocorrer um processo de estratificação espontânea [19, 20]. Nesse processo,
grãos de tamanhos diferentes se separam em camadas monodispersas ao longo da superfície da pilha.
Mais precisamente, para ocorrer a estratificação é preciso que os grãos grandes da mistura possuam
rugosidade (não sejam lisos) permitindo, assim, que o ângulo de inclinação da pilha seja elevado, e
é necessário que o fluxo dos grãos seja lento o bastante para provocar avalanches intermitentes ao
longo da superfície da pilha. Quando a avalanche ocorre, o fluxo de grãos ao longo da superfície cria,
constantemente, buracos nas camadas superficiais da pilha, de maneira que os grãos pequenos sejam
mais facilmente capturados por eles. Dessa forma, é criado um fluxo descendente de grãos pequenos
e relativamente um ascendente de grãos grandes, ambos transversais ao fluxo principal paralelo à
superfície da pilha. Em cada avalanche temos a formação de um novo par de camadas intercaladas,
onde os grãos de diferentes espécies são separados. Esse par de camadas cresce da base da pilha pela
propagação ascendente de buracos onde os grãos pequenos são capturados por baixo dos grandes.
A estratificação espontânea pode também ser encontrada para mais de dois tipos de grãos [21]. As
camadas formadas também são paralelas à superfície da pilha e ordenadas do centro da pilha para a
superfície e, no caso de três tipos de grãos, a sequência é: grãos pequenos-médios-grandes. Contudo,
quando os grãos grandes são lisos e os pequenos são ásperos, ao invés de uma estratificação, temos
uma segregação em larga escala. Nesse caso, os grãos grandes ficam embaixo da pilha e os pequenos
se acumulam no topo da pilha[19, 22].
Este fenômeno tem relevância em diferentes áreas, tais com geomorfologia. Rochas originadas
em dunas de areias solidificadas apresentam sucessivas camadas alternadas de grãos de diferentes
tipos. Essa regularidade não pode ser explicada por sedimentação periódica, mas pode ser imaginada
como se as dunas de areias fossem construidas com areias trazidas pelo vento e fluindo abaixo da
superfície inclinada das dunas, como acontece nos experimentos[19, 21].
Outra importância do fenômeno está na indústria, onde o processamento e transporte de grãos
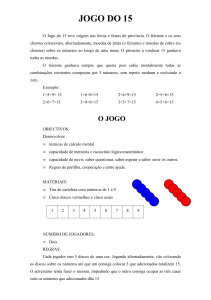
inicialmente misturados podem conduzir à estratificação. Um modelo de Automata Celulares (veja
capítulo 4) foi proposto [19, 22] para a pilha de areia. Neste modelo (figura 2.2), os grãos de areia
são retângulos com a mesma dimensão horizontal, mas com diferentes alturas. Os grãos são soltos
sequencialmente do topo da pilha e permitidos a rolarem pilha abaixo. O grão irá rolar se a inclinação
local (definida como a diferença entre colunas vizinhas) exceder o ângulo critico. Quatro ângulos
críticos θαβ foram introduzidos para grãos tipo α rolando em substrato tipo β (α, β ∈ {1,2}, onde 1 e
2 referem-se, respectivamente, a grãos grandes e pequenos), afim de levar em conta a diferença entre
as propriedades dos grãos. Como os grãos pequenos tendem a ficar acima dos grandes, normalmente
temos θ21 < θ12 . Também, em geral, θ21 < θ11 e θ12 < θ12 . Entretanto, θ22 e θ11 dependem da rugosidade dos grãos. Para θ21 < θ11 < θ22 < θ12 os grãos grandes são mais rugosos e o modelo fornece
estratificação em concordância com o experimento. Se θ22 < θ11 , grãos pequenos mais rugosos, o
modelo fornece somente segregação em larga escala (grãos grandes separados na base da pilha).
Outra característica dos materiais granulares é o fato de que quando esses materiais estão em
repouso dentro de um recipiente alto, tipo um silo de armazenagem de grãos de cereais, a pressão
6
2.2 Propriedades dos Sistemas Granulares
7
Fig. 2.2: Modelo de Automata Celulares para a estratificação de material granular (a-c); Abaixo:
Imagem mostrando os padrões de estratificação obtidos por simulação numérica [21].
7
Sistemas Granulares
8
na parte mais baixa do recipiente não tem uma dependência com a altura da coluna de grãos como
acontece num fluido, isto é, a pressão na base do recipiente não cresce indefinidamente à medida que
a altura de material dentro cresce. À medida que se colocam grãos dentro do recipiente a pressão
nas camadas mais baixas aumenta até atingir um limite que é seu valor máximo e é independente da
altura dos grãos dentro do recipiente. Devido às forças de contato entre os grãos e o atrito estático
com as paredes laterais, torna-se possível ao recipiente suportar um peso extra. É essa característica
que torna possível ao fluxo de areia através de um orifício ser quase constante, tornando possível
a utilização das ampulhetas. Contudo, esse fluxo temporal médio possui um comportamento muito
complicado [23, 24, 25, 26].
A distribuição de forças P(f) numa pilha, onde f é a força que um grão exerce no fundo do recipiente é dada por [27]
−f
P (f ) = Ce f0 ,
(2.3)
onde C e f 0 são constantes. A flutuação de f é grande e escala com a profundidade, semelhantemente
à força média, ou seja com o quadrado. Esse comportamento foi explicado por um modelo simples
no qual massas dispostas numa rede distribuem desigual e aleatoriamente seus pesos sobre as partículas das camadas mais baixas. Outro fato de interesse é que as forças dentro da pilha são muito
heterogênias, formando camadas ao longo das quais as tensões são muito intensas. Essas cadeias são
extremamente importantes para muitas propriedades dos sistemas granulares. Por exemplo, se uma
onda sonora é iniciada num ponto qualquer do meio, sua transmissão para outro ponto é sensível ao
arranjo de todos os grãos do meio [14, 28, 29]. Essa dependência com o arranjo microscópico dos
grãos mostra que fenômenos macroscópicos podem ser afetados pelo posicionamento e movimento
de até mesmo um único grão do meio. Essa sensibilidade é maior do que aquelas encontradas nos
fenômenos de interferência convencional, onde perturbações devem ser comparadas ao comprimento
de onda. Essa sensibilidade pode ser explicada pela extrema heterogeneidade do material: perto das
cadeias de forças o efeito sobre a transmissão local das ondas sonoras pode ser maior que longe das
cadeias de força.
2.2.2
Empacotamento
Vejamos agora uma questão fundamental, que é o empacotamento dos materiais granulares. Este
fenômeno é de grande importância tanto na indústria, quanto no cotidiano de uma pessoa. Como sabemos, um pacote de grãos pode ser estável em muitas configurações diferentes, que podem apresentar
densidades locais diferentes do valor global, dependendo de quão compacto está o material em cada
região. Considera-se que empacotamentos aleatórios (obtidos derramando-se os grãos e sem qualquer
procedimento extra de compactação) têm uma densidade média ρ compreendida entre dois valores:
ρbd , para o empacotamento de mais baixa densidade (obtido através da passagem de ar através dos
grãos, por exemplo) e ρad , que representa a densidade do empacotamento aleatório mais denso. Estes
limites não são bem definidos e dependem de diversas propriedades do material e da história da preparação do empacotamento. Tecnologicamente, é de grande importância poder controlar a densidade
8
2.2 Propriedades dos Sistemas Granulares
9
do material, como nos casos de produção de cerâmicas de alta resistência, ligas especiais e materiais
porosos. Dependendo do processo de enchimento do recipiente, um aglomerado aleatório de grãos
esféricos pequenos pode ser formado em qualquer lugar. Esses aglomerados possuem um volume
fracionário η que pode variar de η=0,55 até η=0,64 [30]. Através de um atrito estático, a cadeia de
forças pode manter a pilha de grãos numa configuração meta-estável entre esses dois limites. Uma
vez que kB T é desprezível, a mudança na densidade só pode ser feita por um estímulo externo, como
uma vibração. Para essa situação em particular, foi montado um novo formalismo em substituição à
Termodinâmica tradicional [31, 32]. A hipotese inicial, hipotese ergódica, é a de que todos os pós
com as mesmas especificações de conteúdo, formados por uma manipulação extensiva e ocupando o
mesmo volume possuem as mesmas propriedades macroscópicas. Depois, a temperatura é ignorada uma pilha de areia “quente“ é a mesma que uma “fria“. Entretanto, os pós possuem densidade variável, isto é, um pó de grãos esféricos possui uma densidade mínima e uma máxima. Isto sugere uma
analogia entre o volume de um pó e a energia de um sistema estatístico, tornando necessário definir
o equivalente a um Hamiltoniano para os pós, que expresse seu volume macroscópico em termos das
coordenadas microscópicas. Portanto, nesse novo formalismo, a energia foi negligenciada uma vez
que a única interação entre os grãos é de repulsão (tipo esfera dura) e o Hamiltoniano é substituído
por um volume fracionário, a entropia é ainda o logaritmo do número de estados acessíveis a um
dado volume e as outras quantidades termodinâmicas são definidas de modo análogo à Termodinâmica tradicional. Assim, ao invés de kB T, tem-se uma nova temperatura efetiva dada em função da
compactação, isto é, de quão compacto é o material. O estímulo externo destrava o empacotamento,
permitindo ao sistema viajar através do espaço de fases [33].
Um grupo experimental [34] realizou cuidadosos experimentos sobre compactação de bolas de
vidro e outros tipos de grãos dentro de uma coluna vertical submetido a “tapinhas“ bem controlados
e estudaram sistematicamente a dependência da densidade com a duração, intensidade e história das
seqüências dos tapinhas. A densidade encontrada cresceu, na média, com o tempo segundo uma lei
logarítmica:
ρ∞ − ρ0
ρ(t) = ρ∞ −
,
(2.4)
1 − ln(1 − τt )
onde ρ0 é a densidade inicial, ρ∞ a densidade final e τ um tempo característico. Observou-se que a
densidade final depende da velocidade (ou freqüência) com a qual a amplitude dos tapinhas foram
crescendo e decrescendo com o tempo.
2.2.3
Vibração - Segregação
Até agora, lidamos com sistema formados por grãos similares. No mundo real, contudo, aplicações comuns envolvem processos com partículas de diferentes tamanhos, densidades e formas. Uma
característica dos sistemas granulares é seu comportamento de separação dos grãos por tamanho,
quando o sistema é colocado para vibrar. Em muitos casos, grãos com propriedades não uniformes
separam-se interiamente em pouco tempo. O fenômeno pode ter sérias implicações práticas: se grãos
de diferentes tamanhos possuem também diferentes composições químicas - uma situação comum na
9
Sistemas Granulares
10
indústria - uma segregação rápida pode comprometer a qualidade do produto industrial final. Até o
momento, não há uma visão unificada no entendimento da segregação, e naturalmente o tema permanece cheio de controvérsia em todos os seus aspectos. Tentativas têm sido feitas a fim de tentar
predizer a segregação do ponto de vista da Termodinâmica [31, 35], apesar dos sistemas granulares
serem sistemas bem longe do equilibrio. O processo de segregação, em geral, ocorre em três situações: quando os sistemas entram em vibração, durante o encher e o esvaziar de um vazilhame e
quando entram em rotação. Durante a compactação de grãos pela ação da vibração ocorre uma segregação das partículas granulares por tamanho, efeito esse conhecido como “Efeito Castanha do Pará”
[36]. Nesse processo, o que se leva em conta é apenas a diferença de tamanho. A fim de entendermos
esse efeito vamos considerar um exemplo prático no qual se misturam em um recipiente alguns grãos
de arroz e de feijão, ambos sem nenhum tipo de cozimento. Os grãos são colocados aleatoriamente
no recipiente. Se submetermos nosso sistema (recipiente + arroz + feijão) a um tipo qualquer de vibração (por exemplo, tapinhas na lateral do recipiente), notaremos que o arroz e o feijão começam a
se separar. Continuando com os tapas, verificaremos que o arroz irá se situar predominantemente no
fundo do recipiente, ao passo que o feijão se situará na parte superior do recipiente. Tal segregação se
dá não por causa das diferenças de densidades entre os dois meios granulares, mas sim devido ao fato
de os grãos de feijão terem uma granulometria maior que os grãos de arroz. Se introduzirmos agora
uma partícula muito maior que o tamanho médio das partículas de feijão, e conseqüentemente que
as de arroz, a nova partícula adicionada, mesmo que esta esteja inicialmente no fundo do recipiente,
atingirá a superfície desse, quando em vibração, e ficará sobre as partículas de feijão e de arroz (figura
2.3). A este efeito de movimento ascendente dos grãos de maior diâmetro em relação aos demais em
um sistema granular vibrando é que dá-se o nome de efeito Castanha do Pará. Esse efeito aparece
em vários processos utilizados no cotidiano, sem muitas vezes ter o conhecimento de sua existência
ou sua importância. Um exemplo de processo que sofre influência deste efeito é o simples ato de
se executar um peneiramento. Quanto se peneira submete-se um pacote granular a uma determinada
vibração, vibração esta que promove o efeito Castanha do Pará e uma segregação por tamanhos. As
partículas de menor tamanho movem-se para a parte inferior do pacote e se deparam com as aberturas
da peneira. As partículas suficientemente pequenas atravessam os orifícios da peneira e o pacote todo
desce, até que só restem partículas maiores que o orifício da peneira no pacote granular.
Experimentos com sistemas granulares oscilando verticalmente [13] mostram uma ligação direta
entre a convecção dos grãos e a separação por tamanho. Quando os grãos maiores entram no fluxo
de convecção ascendente elas permanecem nesse fluxo até atingirem o topo da superfície. Uma
vez lá permanecem, pois não podem seguir os grãos menores no fluxo de convecção descendente
ao longo das paredes do recipiente. Dessa forma observamos que existe uma predominância da
Dinâmica sobre a Termodinâmica. O que prevalece é a separação e não, como seria de se esperar
semelhantemente aos fluidos comuns, a mistura homogênea favorecida pela entropia. Como citado,
ainda não são entendidas as causas que provocam a separação por tamanho induzidas por vibração
nos sistemas granulares. Porém, existe uma questão importante, principalmente para a indústria, que
é de como a mistura de grão ocorre como uma função da fração do recipiente que está cheia com os
grãos. Argumentos geométricos simples parecem ser suficientes para predizer a taxa de mistura e a
10
2.2 Propriedades dos Sistemas Granulares
11
Fig. 2.3: Segregação por diferença de tamanho - Efeito “Castanha do Pará” [36].
eficiência desse efeito [14].
Outro comportamento desses sistemas que, juntamente com aquele descrito anteriormente, tem
provocado um intenso debate é a causa do fluxo de convecção de grãos induzido pela vibração, a formação de pilha na parte superior desse fluxo e qual o papel do gás intersticial nesse comportamento.
Tanto a segregação quanto o fluxo de convecção ocorrem quando o sistema vibra verticalmente. Suponha um vasilhame cilíndrico contendo grãos. O vasilhame passa a vibrar verticalmente e sua posição
vertical (direção z) em função do tempo é dado pela equação[14]:
z(t) = A cos(ωt),
(2.5)
onde A é a amplitide de vibração e ω a freqüência. Quando a aceleração específica
Γ≡
2
Aω 2
4π 2 fext
A
=
,
g
g
(2.6)
onde g é a aceleração da gravidade e f ext é a freqüência externa de oscilação, for maior que a unidade,
o material, para cada ciclo, perde contato com o fundo do recipiente, ocorrendo então um fluxo
macroscópico de grãos. Este fluxo toma a forma de correntes de convecção, promovendo o transporte
de grãos (figura 2.4). Quando o recipiente é cilíndrico ou retangular, esse fluxo é ascendente na parte
central do recipiente e descendente junto as suas paredes laterais, levando a formação de uma pilha
central de grãos no topo do sistema seguida de uma avalanche estacionária. Entretanto, diferentes
condições iniciais, tal como a inclinação das paredes do recipiente, tornam possível inverter o sentido
do fluxo de convecção, fazendo com que ele seja descendente no centro. É o que acontece quando a
forma do recipiente muda para a forma de um cone invertido. Nesse caso, temos um fluxo descendente
na parte central e ascendente nas paredes laterais [13, 34, 37, 38, 39, 40, 41]. Geralmente, a forma
11
Sistemas Granulares
12
Fig. 2.4: Esquema mostrando a convecção de partículas em recipientes de formatos diferentes. Na
seqüência temos da esquerda para a direita e de cima para baixo: a configuração inicial; configuração
após algumas vibrações; configuração após as esferas das paredes laterais terem alcançado o fundo
do fluxo de convecção; configuração mostrando a parede direita com atrito e a esquerda sem atrito
e finalmente um recipiente com seção transversal cônica. Nesse caso, o fluxo se dá invertido, isto é,
ascendente junto as paredes laterais e descendente ao centro [14].
12
2.2 Propriedades dos Sistemas Granulares
13
do vasilhame, o atrito entre os próprios grãos e o vazilhame podem ser combinados para reverter a
direção do fluxo de convecção [42]. Existem dois mecanismos que são utilizados para explicar o
comportamento: Primeiro uma teoria que envolve o atrito dos grãos com as paredes do recipiente.
Algumas experiências e simulação [7, 13, 23, 39, 41, 43] mostram uma espécie de efeito catraca
que produz um fino e rápido movimento das camadas perto das paredes e conduz ao fluxo circular.
Experimentos com imagens de ressonância magnética foram capazes de mostrar um movimento suave
de grãos em todo o vasilhame [44]. Destas medidas obteve-se tanto a dependência da velocidade de
convecção com a profundidade, quanto o detalhamento do perfil das velocidades. Os experimentos
mostram que um fluxo mais rápido ocorre numa fina camada perto das paredes. Isso é muito diferente
do que se espera ocorrer com um fluido convencional e levanta um número de problemas para as
condições de contorno corretas para a convecção granular e outros fluidos.
No segundo mecanismo a convecção e o empilhamento ocorrem na presença de gás intersticial.
Esse efeito domina quando o atrito com as paredes laterais do recipiente é reduzida ou eliminada,
por exemplo, escolhendo condições de contorno periódicas que podem ser realizadas, pelo menos,
parcialmente em experimetos e/ou escolhendo grãos relativamente pequenos. Experimentos [37, 45]
tentaram mostrar qual é o papel do gás interticial na convecção granular. Alguns indicam que o
fluxo é interrompido quando a pressão interior é reduzida, enquanto outros indicam que a convecção
permanece inalterada para pressões abaixo de 4 torr. Pak et al. [45] resolveram o conflito realizando
um experimento onde a pressão é mantida fixa com valores desde 1 atm até o vácuo. Os resultados
mostram que a pilha devido ao fluxo de convecção persiste para pressões até 10 Torr. Quando a
pressão decresce mais ainda, a altura h da pilha normalmente diminui. Este efeito foi observado
para grãos com diâmetro acima de 1mm, e o efeito é mais pronunciado para grandes amplitudes de
oscilação. Ainda hoje, permanece o desafio de desenvolver uma teoria que incorpore tanto o atrito
quanto o efeito do gás intersticial.
2.2.4
Formação de Padrões na Superfície dos Meios Granulares
Fenômenos ondulatórias na superfície livre dos sistemas granulares aparecem quando esses entram em vibração [40, 46, 47, 48, 49]. Isso pode ser observado em experimentos com esferas de
vidro ou cobre de pequenos diâmetros d colocadas dentro de um recipiente (em geral, cilíndricos ou
cúbicos) até atingirem uma determinada altura h dentro do recipiente. Passa-se, então a vibrar verticalmente o recipiente. Em resposta a essas vibrações observamos a formação de ondas estacionárias
sobre a superfície com diversos padrões que vão desde quadrados (que consistem de duas ondas estacionárias com vetores de onda perpendiculares oscilando com freqüência f = f ext /2) a tiras, passando
por dobras e figuras hexagonais, tudo dependendo da freqüência com que o recipiente vibra. Podem
ser ondas que se propagam, quando o material forma pilhas íngremes na superfície, ou ondas estacionárias, quando as pilhas são suaves e pequenas, ou mesmo não existem.Também, existe a formação
de outros padrões mais complexos com a possibilidade de até um estado caótico [38, 49, 50].
Essas ondas estacionárias são caracterizadas por um comprimento de onda λ, definido como sendo
a distância entre duas cristas sucessivas (distância entre duas linhas claras na figura 2.5). Estes ex13
Sistemas Granulares
14
perimentos exploram um estado dinâmico altamente longe da configuração de equilíbrio ao nível da
superfície livre. Não existe nenhuma aproximação teórica que descreve os padrões observados, e nem
mesmo suas principais características, tais como a seleção dos comprimentos de onda, ainda são bem
entendidos. Diferentemente dos líquidos, o diâmetro dos grãos (esferas) é uma parcela significativa
na altura h da camada de material dentro do recipiente e nos comprimentos de onda λ, dos padrões
formados. Além do mais, os padrões não são uma mera perturbação da superfície do sistema, eles
envolvem uma grande quantidade do material como um todo. Isto já é suficiente para limitar as aplicações da hidrodinâmica e da teoria do contínuo. Além de algumas similaridades entre os padrões
observados, ainda está em aberto a questão de qual correspondência existe entre esses sistemas e os
líquidos vibrando .
Fig. 2.5: Padrões formados para N=h/d=8 e fext =67Hz. a) Tiras: f/2 e Γ=3.3; b) Hexágonos: f/2 e
Γ=4.0; c) Ondas planas com dobras: Γ=5.8 ; d) Competição entre quadrados e tiras: f/4 e Γ=6.0; e)
Hexágonos: f/4 e Γ=7.4; f) Desordem:Γ=8.5 [49].
Uma das características observadas nos experimentos é que a formação dos padrões está relacionada com a altura da camada formada pelos grãos dentro da célula experimental. De fato, os padrões
são formados somente quando N=h/d é de ordem igual ou superior a 3. Os experimentos mostram
que os parâmetros importantes são a aceleração adimensional de vibração Γ (equação 2.6) e a razão
14
2.2 Propriedades dos Sistemas Granulares
15
das energias cinética e potencial . Nesses resultados experimentais, para uma dada freqüência externa
fext (fext > 10 Hz) existe uma aceleração crítica Γ on (que implica na variação da amplitude externa
A) a partir da qual os padrões começam a se formar. Para o caso de camadas rasas (N=4 até N=8)
observa-se que existe uma aceleração Γof f a partir da qual os padrões parecem desaparecer, isto é,
para uma dada freqüência fext os padrões são formados para acelerações Γ tais que Γ on (fext ) < Γ(fext )
< Γof f (fext ) , e a transição em Γof f (fext ) corresponde à transição de ondas para superfície plana com
dobras (flat with kinks). Para N>4 existe formação de padrão para freqüências superiores a 10 Hz
(pelo menos até 110 Hz para N=6). Os padrões observados para uma dada aceleração exatamente
acima de Γon (fext ) vão de padrões quadrados (que consistem de duas ondas estacionárias com vetores
de onda perpendiculares oscilando com freqüência f= fext /2) a baixa freqüência, a padrões que tem a
forma de tiras (consistindo de uma única onda estacionária) a altas freqüências. Essas tiras parecem
ter em comum o fato de serem perpendiculares as paredes das células, o que acarreta uma forte curvatura perto das paredes. À medida que a freqüência externa fext aumenta, novas tiras nucleiam nas
regiões de alta curvatura e defeitos são gerados no centro da célula onde o comprimento de onda é
menor. A freqüência externa na qual ocorre a transição de quadrados para tiras depende do tamanho
das partículas e da altura h das esferas dentro do recipiente. Os padrões são invariantes por translação, de modo que durante sucessivos períodos de vibração um quadrado (ou tira) é simplesmente
transladado para frente e para trás por meio comprimento de onda. Uma análise da dispersão dos
padrões revelou que existe uma freqüência f0 (diferente da freqüência de transição) abaixo da qual o
comprimento de onda parece ser linear com fext −2 (f0 =22Hz para N=8). A equação é
−2
λ = gef f fext
+ λmin ,
(2.7)
onde gef f é proporcional a g (gef f = 325 cms−2 para Γ=3) e λmin varia de 5 a 10 diâmetros dos
grãos. Acima de f0 o comprimento de onda praticamente não depende da freqüência externa, fext .
Também a diferença entre o que é uma freqüência baixa e uma freqüência alta torna-se evidente no
gráfico comprimento de onda ( λd ) versus aceleração adimensional Γ, onde se observa que ( λd ) cresce
lentamente com Γ a baixas freqüências e a altas freqüências decresce rapidamente Outra importante
característica dos sistemas granulares advém das interações entre os grãos. Diferentemente do que
acontece nos gases ou líquidos, nos materiais granulares densos as interações são inelásticas, de forma
que existe perda de energia em cada colisão. Assim, todas as aproximações baseadas puramente
nas interações elásticas ou leis de conservação (Teoria dos Gases Ideais) não podem ser utilizadas,
levando à necessidade de uma nova formulação da Mecânica Estatística desses sistemas. È importante
ressaltar que qualquer semelhança com o comportamento dos fluidos é meramente aparente uma
vez que para os materiais granulares as ondas nas superfícies não nascem como resposta linear à
energia externa aplicada, mas como uma transição de histerese altamente não linear do estado sólido.
O comportamento tipo fluido dos meios granulares somente tem início acima de um determinado
nível de excitação e devido às colisões inelásticas os grãos retornam quase que imediatamente ao
repouso assim que o estímulo externo é retirado. Essa inelasticidade inerente às colisões entre grãos
levam a complicações se tentarmos utilizar as Leis de Newton para as interações grão-grão, uma vez
15
Sistemas Granulares
16
que carecemos de uma visão coerente das forças dissipativas envolvidas. Questões sobre qual é a
dependência correta das forças de atrito com a velocidade e qual é a importância da duração dos
impactos ou a inclusão dos graus de liberdade rotacional têm sido amplamente debatidas [51, 52, 53,
54, 55, 56, 57, 58]. O tratamento das colisões não frontais que ocorrem a baixas velocidades trás
incertezas, uma vez que ele envolve uma imprecisão no que se chama atrito estático e atrito dinâmico
em termos granulares.
Outra característica observada nos meios granulares, e que é resultado da inelasticidade das colisões, é a formação de aglomerados em determinadas regiões do meio. Esse efeito mostra uma falha
da aplicação da hidrodinâmica Newtoniana, pois uma vez formados os aglomerados eles não são mais
capazes de se desfazerem. A energia fornecida pode não ser suficiente para termalizar o sistema, como
num banho térmico comum [53, 59]. Uma estimativa das condições sob as quais os aglomerados se
formam é feita se considerarmos um sistema linear de comprimento L num estado inicial uniforme
onde os grãos ocupam um volume fracionário η. A solução prevista pela hidrodinâmica Newtoniana
é que os aglomerados se formam quando o produto ηL torna-se menor que um determinado valor que
depende do grau de inelasticidade. Para L grande, o modelo fornece que o sistema sempre apresentará
a formação de aglomerados, não importando quão pequena é a contribuição da inelasticidade de cada
colisão. Em algumas situações a inelasticidade pode conduzir as partículas a colidirem infinitas vezes
num tempo finito. Isso é um tipo especial de aglomerado conhecido como colapso inelástico [60, 61].
Fisicamente, o colapso inelástico consiste de uma sucessão de colisões inelásticas entre as partículas
fazendo com que elas permaneçam muito próximas, quase que em contato, sem movimento relativo
entre elas. Ele foi observado em uma dimensão, porém aparentemente também existe em dimensões
superiores [62]. Entretanto, a relação que realmente existe entre colapso inelástico e o fenômeno de
formação dos aglomerados, que é a condição para a não utilização da hidrodinâmica, ainda necessita
um melhor esclarecimento. Uma das hipóteses é que uma vez formados os aglomerados, o colapso
inelástico só ocorre quando a energia perdida por partícula excede um valor crítico. Um dos mais
notáveis aspectos dos aglomerados, que é também verdade para o regime de colapso elástico, é assumirem a configuração de grãos em forma de cordas. Nesse sentido, a figura 2.6 assemelha-se muito à
Fig. 2.6: A formação de aglomerados em 2-d devido a colisão inelástica de 40000 discos rígidos. O
tempo é equivalente a 500 colisões por partículas e a área fracionária média ocupada pelas partículas
é 0,05. [14, 59].
16
2.2 Propriedades dos Sistemas Granulares
17
densidade de mapas qualitativa do universo visível.
Nos sistemas granulares, as forças de atrito tangenciais possuem um papel fundamental, principalmente nos sistemas granulares densos. As forças de atrito são praticamente incontroláveis e
altamente dependentes da história. O contato entre dois grãos pode gerar um atrito cinético devido
ao deslizamento de um grão sobre o outro ou pode ser um contato de pressão devido ao ”aperto“
do aglomerado ou uma combinação desses. Esse forte comportamento não linear torna a análise do
atrito nos meios granulares extremamente difícil. Na maior parte dos estudos teóricos adota-se a
forma mais simples da Lei de Coulomb. Isto quer dizer que, nos estudos teóricos, o atrito torna-se
praticamente independente da velocidade relativa durante o deslizamento tão logo a força tangencial
atinge um limiar. Entretanto, o problema mais desafiador é como calcular a força de atrito estático.
A força de atrito de contato entre sólidos é praticamente impossível de sere determinada, no caso de
muitas partículas, devido ao fato de que existem menos vínculos que componentes no balanceamento
das forças [63, 64].
Como tivenos a oportunidade de observar, os sistemas granulares oferecem um campo complexo e
ainda inteiramente aberto à pesquisa. Muitos de seus fenômenos são, se não por completo, quase que
inteiramente desprovidos de um explicação teórica satisfatória. A maioria dos estudos em sistemas
granulares se concentra na área experimental, fornecendo dados, evidenciando fenômenos, porém
deixando a interpretação teórica em aberto. Na tentativa de suprir essa deficiência teórica, estudos
utilizando simulação numérica (principalmente Dinâmica Molecular e Automata Celulares) têm sido
realizados. É nesse rumo que esse trabalho tende a seguir: utilizar computadores na tentativa de construir conceitos teóricos que possam explicar determinados comportamentos dos sistemas granulares.
17
Sistemas Granulares
18
18
Capítulo 3
Fractais
3.1 Introdução
Quanto mede, afinal, a costa da Bretanha? É com essa frase que Benoît Mandelbrot inicia
seu célebre livro, onde ele introduz o conceito de Fractal [65]. A ideia básica é saber qual é o comprimento de uma curva sinuosa. Se tivéssemos um linha toda embolada sobre uma mesa a resposta
seria fácil, bastando para isso esticarmos a linha e utilizarmos uma régua milimetrada ou mesmo um
metro padrão qualquer. Mas, e a costa da Grã- Bretanha que é completamente sinuosa e não pode ser
esticada? E como medir qualquer outra curva sinuosa como, por exemplo, o contorno de uma nuvem
ou mesmo a distância entre dois pontos localizados sobre as montanhas do Parque do Itacolomi, que
são completamente cheias de “pontas” devido às rochas.
Se considerarmos uma linha imaginária entre dois pontos distantes quaisquer sobre as montanhas
do Parque do Itacolomi, parece óbvio que o comprimento da linha entre esses dois pontos sobre a
montanha, deva ser no mínimo igual à distância, em linha reta, desses mesmos dois pontos. Porém,
devido à sinuosidade da montanha, espera-se que o comprimento da linha deva ser maior que a distância em linha reta. Obviamente, poder-se-ia pensar num grande número de processos para se fazer
essas medidas. Por exemplo, poderiamos fornecer a um estudante um metro padrão rígido e pedirmos
que fosse ao Parque fazer sucessivas medidas ao longo da linha. Se não ficássemos satisfeitos com
o resultado, poderíamos fornecê-lo uma régua, por exemplo de 30 cm e calibrada conforme o metro
padrão utilizado anteriormente, e solicitarmos que refizesse a medida. Como a régua é menor que o
metro utilizado anteriormente, poderiamos ter uma medida um pouco mais precisa. E assim sucessivamente, quanto menor a “régua” utilizada, mais precisa deveria ser a medida. Desta forma, também
parece natural que quanto menor a “régua”, maior deveria ser a medida do comprimento. No limite,
a utilização de “réguas” infinitamente pequenas poderia gerar comprimentos tendendo ao infinito.
Na prática, o método de medida descrito seria inexeqüível. Na tentativa de resolver problemas
dessa natureza, é que nascem conceitos como os de fractais, dimensão fractal, etc. Baseado nisso,
vejamos a seguir uma breve revisão sobre Fractais.
19
Fractais
20
Fig. 3.1: Estrutura Fractal-Imagem de um objeto dendrítico formado pela injeção de ar atmosférico
em silicone (Diâmetro 200mm) [66].
3.2 Geometria Fractal
Durante algum tempo, físicos de diversas áreas perceberam que muitas estruturas resultantes de
seus experimentos apresentavam um tipo especial de complexidade geométrica. Isso se deve, em
parte, a B. Mandelbrot [65], que foi quem chamou a atenção para um conjunto de objetos que apresentavam uma propriedade geométrica muito particular: seus contornos são muito sinuosos. Esses
objetos são a região costeira de alguns continentes, o traçado no mapa de alguns paises que, em geral, utilizam os rios como fronteira, as siluetas das árvores e até mesmo as superfícies das nuvens.
Mandelbrot nomeou essas formas complexas de fractais, a fim de expressar o que poderia ser caracterizado por uma dimensionalidade não-inteira (fractal). Com o desenvolvimento das pesquisas
a lista de exemplos de fractais tornou-se longa e inclui estruturas desde agregados microscópicos até
aglomerados de galáxias.
Uma área onde os fractais são comumente observados são nos fenômenos de crescimento longe do
equilíbrio. Como exemplos desses processos, temos a formação de dendritos durante a solidificação
de um meio superresfriado, os dendritos formados quando um fluido viscoso é injetado noutro mais
viscoso e a deposição de íons em um eletrodo. A figura 3.1 mostra um exemplo de uma estrutura
fractal.
Um característica comum dos objetos fractais é o fato de eles serem auto-similares, isto é, são
invariantes segundo uma transformação por escala isotrópica, ou seja, quando todos os seus eixos são
reescalados por um mesmo fator. Isso significa que eles são formados por partes que são similares ao
todo. Se cortarmos uma parte de um objeto fractal, e olharmos este pedaço como um todo, o objeto
resultante parecerá (num sentido estatístico) com o original. Por exemplo, se pegarmos uma folha de
20
3.2 Geometria Fractal
21
um galho de uma samambaia, ela parece com o galho original. A folha e o galho não se sobrepõem,
mas suas propriedades estatísticas são as mesmas. Para formas simples, a auto-similaridade não é
necessariamente satisfeita. Por exemplo, um círculo e seu arco não parecem o mesmo. Outros tipos
de fractais são exatamente auto-similares, e não num sentido estatístico como os exemplos anteriores.
Um dos exemplos mais simples de auto-similaridade exata é o conjunto de Cantor. É um fractal de
tamanho finito contendo partes desconexas imersas no espaço unidimensional (d=1). Sua construção
é fundamentada na divisão subseqüente de intervalos gerados de um intervalo maior [0, 1]. Primeiro,
o intervalo maior é dividido em três segmentos idênticos menores de comprimento 1/3. Remove-se
o segmento do meio. No proximo passo, a regra é aplicada aos dois intervalos recém criados, e o
processo é repetido ad infinitum. O resultado é um fractal determinístico exatamente auto-similar.
k=0
k=1
k=2
k=3
Para vermos a auto-similaridade basta olharmos, por exemplo, a geração 3 e verificarmos que
os quatro primeiros segmentos não vazios são indênticos à geração 2 como um todo, ou seja, se
crescermos parte da geração 3 por um fator três, obtemos a geração 2. Em geral, se crescermos parte
de uma geração k por um fator três obtemos a geração k-1. Na literatura, encontramos outros fractais
matemáticos que apresentam auto-similaridade exata, e a título de exemplo podemos citar a curva de
Koch e o triângulo de Sierpinski [69].
3.2.1
Dimensão Fractal - Definição
Para caracterização quantitativa de um sistema auto-similar, é necessário conhecer algumas definições. A menor dimensão Euclidiana do espaço no qual o objeto está imerso chama-se dimensão de
imersão d. Dessa forma a dimensão de imersão de uma linha é 1. de um disco é 2 e de um cubo é 3.
O volume, V(r), de qualquer objeto pode ser medido cobrindo-o com caixas de aresta r, e volume rd .
São necessárias N(r) caixas para cobrí-lo. Assim, a expressão
V (r) = N (r)rd ,
(3.1)
fornece o volume do objeto. Se mudamos a unidade de medida de r (reescalar), no mínimo devemos
esperar que para qualquer objeto N(r)∼r−d . Semelhantemente, para os fractais, em geral, temos:
N (r) ∼ r−D .
(3.2)
onde D < d é conhecida como dimensão fractal [65, 66, 68]. Para ser mais preciso, um fractal é
21
Fractais
22
definido por D > dT , onde dT é a dimensão topológica do objeto estudado. Assim, para um conjunto
desconexo temos dT =0, para uma curva dT =1, para uma superfície dT =2 e para um sólido dT =3. Da
equação 3.2 obtemos:
ln(N (r))
D = lim
.
(3.3)
r→0 ln(r −1 )
Para o conjunto de Cantor, o comprimento do menor intervalo numa interação k é rk =(1/3)k . O
número de intervalos de comprimento rk na interação k é N(rk )=2k . Portanto, da equação 3.3 obtemos
D= ln(2)
= 0,639..., ou seja, o conjunto de Cantor é um fractal, já que D > dT = 0.
ln(3)
3.2.2
Fractais Auto-afins
A auto-similaridade de um objeto é equivalente à invariância de suas propriedades geométricas
numa escala isotrópica de comprimento. Entretanto, em muitas situações físicas relevantes a estrutura
do objeto é tal que ele é invariante sob uma transformação de escala somente se seus comprimentos
escalam em cada direção espacial com fatores diferentes, isto é, bR=(b1 x1 ,b2 x2 ,b3 x3 ,...) Esta anisotropia fractal é conhecida como auto-afim. Para um fractal determinístico auto-afim essa invariância
por escala significa que o sistema reescalado bR é idêntico a uma parte do sistema original R. Para
um fractal estocástico auto-afim, esta identidade é somente no sentido estatístico.
Uma função que representa um perfil típico dos fractais auto-afins, e que é unívoca, tem a seguinte
propriedade:
F (x) ' b−H F (bx),
(3.4)
onde H > 0, conhecido como expoente auto-afim ou expoente de Hurst, é um expoente que expressa
uma quantidade mensurável chamada de rugosidade da função F(x). A equação 3.4 mostra que uma
função auto-afim deve ser reescalada diferentemente na abscissa e na ordenada. Se a abscissa é
escalada por um fator b (x → bx), a ordenada deve ser escalada por um fator bH (F(x) → bH F(x)),
a fim do objeto resultante sobrepor o objeto obtido na geração anterior. No caso especial de H=1, a
transformação por escala é isotrópica e o objeto é auto-similar.
Uma conseqüência importante da equação 3.4 está relacionada com a escala da diferença da imagem de dois pontos x1 e x2 pertencentes ao domínio de F(x), isto é, a escala da diferença de “altura”
∆(r)≡|F(x1 )-F(x2 )| entre dois pontos separados pela distância r≡|x1 -x2 |. Para sistemas auto-afins
∆(r) satisfaz a equação 3.4. A solução da equação 3.4 é a lei de potência:
∆ ∼ rH .
(3.5)
Pode-se também associar às funções auto-afins a dimensão fractal D. Para isso, considere uma função
auto-afim definida no intervalo [0, 1]. Cobre-se a função com caixas de tamanho r. Primeiro dividese o domínio horizontal da função em N s segmentos tal que o comprimento de cada segmento seja
22
3.2 Geometria Fractal
23
Fig. 3.2: Perfil da função de Weierstrass: original (superior) e reescalada (inferior). Elas não são
iguais, mas estatisticamente semelhantes. Fator de escala: b=1/2 e H=0,3 [70].
r= N1s . Num intervalo horizontal de tamanho r a altura ∆ escala conforme a equação 3.5, tal que são
necessários ∆r ∼ rH−1 caixas para cobrir a função. Supondo que ∆¿r, e uma vez que são necessárias
rH−1 caixas para cobrir a variação de um segmento, para N s segmentos o número total de caixas
necessárias é:
N (r) ∼ Ns × rH−1 ∼ rH−2 .
(3.6)
D = 2 − H.
(3.7)
Assim, da equação 3.2 temos
Uma generalização desse argumento, leva a uma generalização da equação 3.7:
D = d − H,
(3.8)
onde nesse caso d é a dimensão na qual a função auto-afim está imersa. A figura 3.2 mostra o perfil
da função de Weierstrass [70]. Esta função é um exemplo de uma função auto-afim. Ela é contínua,
mas não é diferenciável em nenhum ponto. Ela é muito útil quando se deseja testar um método, pois
gera perfis com valores controlados de H, como se pode observar na figura 3.2.
23
Fractais
24
24
Capítulo 4
Metodologia - Automata Celulares
4.1 Introdução
Como podemos observar, os sistemas granulares têm imposto vários desafios. Um grande números de experimentos têm sido realizados na tentativa de entender seu comportamento, porém uma
teoria um pouco mais completa que descreva os resultados e/ou que venha prever novos resultados
ainda não foi criada. Tem-se tentado tratar os sistemas granulares ora como sólidos, ora como fluidos,
porém o comportamento exótico que eles apresentam tem imposto limites a esses tipos de tratamentos. Entretanto, nenhum modelo de simulação computacional para sistemas granulares densos, onde
existe movimento de grãos de tamanhos diferentes, foi ainda utilizado para se tentar entender os dados experimentais ou até mesmo obter novas previsões. A simulação é uma técnica poderosa que tem
sido muito útil nos últimos tempos para se entender outros tipos de sistemas.
Das técnicas computacionais utilizadas para se atacar os problemas granulares, uma se destaca por
sua simplicidade: Automata Celulares. Os Automata Celulares são modelos computacionais onde o
tempo e o espaço são ambos discretizados e a evolução do sistema obedece a regras específicas.
Esse modelos permitem estudar sistemas de grande tamanho em um tempo aceitável e a um custo
computacional relativamente baixo.
4.2 Automata Celulares
4.2.1
Introdução
Automata Celulares foram desenvolvidos na segunda metade do século XX por J.Von Neumann
[71], que pretendia desenvolver uma máquina auto-replicante e um computador universal, também
conhecido como Máquina de Turing [72]. Ele conseguiu um automato que tivesse tal propriedade,
porém era extremamente complexo: possuia 29 estados por célula e 200000 células. Jamais foi
implementado num computador. Posteriormente, foram desenvolvidas versões mais simples e consequentemente muitos outros automata foram inventados. Alguns deles são apenas padrões replicantes
25
Metodologia - Automata Celulares
26
enquanto outros são máquinas de Turing.
Automata Celulares foram intorduzidos na Física por S. Wolfram [73], que defendia a tese de que
todas as leis da natureza podiam ser modeladas via automata celulares. Devido à sua simplicidade,
os automata celulares permitem análises matemáticas detalhadas de fenômenos complicados e são
facilmente transformados em modelos simples para descreverem uma grande variedade de sistemas
físicos, químicos, biológicos e outros sistemas. Stephen Wolfram implementou a primeira classificação sistemática e propôs medidas de propriedades físicas como entropia, expoente de Liapunov e
transientes. Outro esforço pioneiro foi feito pelo grupo de Informação Mecânica no M.I.T. [74], que
construiu e comercializou o primeiro computador de automata celulares.
Em meados da década de 80 um número considerável de físicos estatísticos já fazia trabalhos
nesta área, estudando automata que pudessem ser aplicados em realizações físicas. Alguns desses
automata reproduziram certos modelos conhecidos em Física Estatística e outros exibiram novos
tipos de transição de fase.
4.2.2
Definição
Automata Celulares são modelos dinâmicos que possuem graus de liberdade discretos. Na realidade, o tempo e o espaço e o número de estados são discretos e a evolução do sistema obedece a
regras específicas. Cada elemento discreto do espaço - conhecido como célula- tem um dado número
de entradas e uma regra que define seu estado no próximo passo de tempo como função das entradas.
As regras são simultaneamete atualizadas. O espaço discreto é representado por uma rede regular,
algumas vezes infinita, e a cada sítio da rede é associada uma variável discreta σi que pode ter k
diferentes estados σi =0,1,2,3...,k-1. O estado do sistema no tempo t é definido pelos valores de σi
para todos os sítios no tempo t. Sua evolução temporal ocorre de acordo com regras locais onde os
valores de σi no tempo t depende, de modo determinístico ou probabilístico, do estado do sistema no
tempo t-1. Todos os sítios são atualizados simultâneamente a cada passo de tempo.
4.2.3
Automata Celulares Determinísticos
Um dos mais simples automata celulares é o caso de um automato celular determinístico (DCA)
em uma dimensão. Considere uma rede regular unidimensional infinita, onde cada sítio pode assumir
dois valores: 0 ou 1 (base 2). O estado de um dado sítio no tempo t dependerá do estado do própio sítio
e do estado de seus dois primeiros vizinhos, um à esquerda e o outro à direita, no tempo t-1. Desta
forma, existem 23 possíveis estados para os três sítios adjacentes, que são a representação de cada
estado na base 2, isto é, o estado 0 é 000, o estado 1 é 001, o estado 2 é 010 e assim, sucessivamente
até o estado 7, que é 111:
26
4.2 Automata Celulares
Estado 0 −→
Estado 1 −→
Estado 2 −→
Estado 3 −→
Estado 4 −→
Estado 5 −→
Estado 6 −→
Estado 7 −→
27
0x22 +0x21 +0x20 −→
0x22 +0x21 +1x20 −→
0x22 +1x21 +0x20 −→
0x22 +1x21 +1x20 −→
1x22 +0x21 +0x20 −→
1x22 +0x21 +1x20 −→
1x22 +1x21 +0x20 −→
1x22 +1x21 +1x20 −→
000
001
010
011
100
101
110
111
Dizemos então que o automato celular unidimensional de três vizinhos é representado por um
número binário de oito dígitos. Uma vez que qualquer binário de 8 dígitos especifica um automato
celular, existem 28 =256 diferentes regras de automata celulares unidimensional de 3 vizinhos. Porém,
devido ao fato de que o estado 0 sempre fornece 0 no próximo passo de tempo (o que deixaria um
estado inicialmente nulo inalterado) e devido à simetria de reflexão dos estados 1 com 4 e 3 com 6,
temos somente25 =32 regras consideradas válidas (conhecidas com regras legais). Estas regras locais
para um automato celular, também podem ser consideradas como uma função Booleana dos sítios da
vizinhança local [73].
Vejamos a regra 90 (regra legal), que é exemplo de uma classe de automata, conhecida com
“complexa” ou “caótica”, que fornece um padrão não trivial (outros exemplos seriam as regras 18 e
22). Na base 2 temos: (90)2 =01011010. Desta forma, a regra para a evolução dos estados dos sítios
centrais será:
111 110 101 100 011
0
1
0
1
1
010
0
001
1
000
0
Aplicando esta regra para uma rede unidimensional infinita, cujo estado inicial é composto por
um sítio no estado 1 e os outros no estado 0 (não mostrados), temos para os oito primeiros passos de
tempo:
27
Metodologia - Automata Celulares
28
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
Este processo é semelhante ao crescimento de um cristal a partir de uma semente microscópica.
Porém nem todos automata se comportam como o mostrado acima (regra 90). Alguns conduzem a
um estado final onde todos os sítios ficam nulos imediatamente (regra 0 e 160) ou onde todos os sítios
permanecem inalterados (regra 4 e 36). Alguns, como por exemplo, os automata 50 e 122 copiam o
estado 1 do sítio inicial e geram uma estrutura uniforme, onde o estado 1 do sítio inicial é expandido
em cada direção em cada passo de tempo. Os automata celulares caóticos não tendem para um estado
uniforme e fornecem, no limite de tempo infinito, uma configuração auto-similar, no sentido de que a
visão de configurações com diferentes aumento, mas com a mesma resolução são indistingüíveis.
4.2.4
Automata Celulares Probabilísticos
Também conhecidos como Automata Celulares Estocásticos, os Automata Celulares Probabilísticos (PCA) possuem como característica o fato da evolução temporal de cada sítio da rede obedecer a
determinadas regras probabilísticas. Eles podem modelar reações quimicas, modelos de crescimento
de cristais, turbulência, problemas biológicos ou outros processos não-lineares fora do equilíbrio
térmico [75]. Apesar dos automata celulares probabilísticos d-dimensionais descreverem processos
fora do equilíbrio, eles podem ser mapeados em modelos de Mecânica Estatística (d+1)-dimensionais
[76, 77]. Em geral, correspondem a modelos de spin anisotrópicos e envolvem interações multispin
e campos, cujas constantes de acoplamento são calculadas dos parâmetros (probabilidades condicionais) que especificam a regras de evolução do PCA. Os PCA exibem, mesmo em uma dimensão,
transição de fase contínua com expoentes críticos universais e leis de escala.
Como um exemplo de PCA temos o automato celular de Domany-Kinzel [78]. Este modelo de
PCA é especialmente útil no estudo de catálise em reações químicas [79], além do que ele contém, como caso particular, a percolação direcionada na rede quadrada [80]. O modelo de PCA tipo
Domany-Kinzel consiste de uma rede unidimensional com N sitios, i=1,2,3,...,N, com condições de
28
4.2 Automata Celulares
29
contorno periódicas. Cada sítio i da rede possui dois estados possíveis σi =0, 1. No caso geral, o
estado do sistema no tempo t é especificado pelo conjunto dos σi (t) para todo i. No próximo passo
de tempo (t+1), o estado de um dado sítio é σi (t+1)=0 ou 1, dependendo dos estados σi e σi−1
no tempo t de acordo com o conjunto de probabilidades condicionais P(σi−1 (t),σi (t)/σi (t+1)), que
são P(0,1/1), P(1,1/1) e P(1,0/1). Exite uma superfície crítica no espaço dos parâmetros P(0,1/1),
P(1,1/1), P(1,0/1), e os vértices do cubo unitário nesse espaço são os automata celulares determinísticos. No caso de P(0,1/1)=P(1,0/1) e P(1,1/1)=0, obtem-se a regra 90 (DCA) decrita anteriormente. A
evolução temporal deste automato depende dos valores das probabilidades condicionais. Dependendo
dos valores destas probabilidades, a evolução temporal (t→∞) conduz a um estado homogênio, onde
todos os sítios estão no estado 0 (conhecido como fase congelada) ou a um estado que possui uma
fração finita de sítios intercalados com estado 1 (fase ativa). Esta transição de fase é contínua e caracterizada por um expoente crítico universal, associado a um parâmetro de ordem definido como a
fração de sítios cujo estado seja 1. Dentro da fase ativa, existe uma região que é sensível às condições
iniciais (fase caótica). Ou seja, dados dois automata sujeitos à mesma regra de evolução e à mesma
seqüência de números aleatórios, porém com os estados iniciais diferindo apenas o estado de um
único sítio, atingirão, depois de um tempo longo, estados completamentes diferentes. Ao contrário,
na fase ativa não caótica, esta pequena diferença não conduz a estados finais diferentes [79, 80].
4.2.5
Automata Celulares de Gás de Rede
O automato celular gás de rede (LGA) foi proposto por Frisch et al [81] como uma alternativa aos tradicionais métodos de solução numérica das equações de movimento. Foi utilizado uma
classe de gás de rede determinístico com elemenos Booleanos discretos para simular a equação de
Navier-Stokes. O LGA é um tipo de sistema dinâmico-molecular que oferece a vantagem de garantir
estabilidade numérica juntamente com uma simplicidade computacional excepcional. A idéia básica
por trás dos LGA é definir convenientemente um automato celular juntamente com leis de conservação apropriadas, que conduzem à equação do movimento. Em comparação aos gases reais e aos
líquidos reais, o modelo considera um micro-mundo de partículas, representando as moléculas, que
estão dispostas nos sítio de uma rede regular (a triangular foi originalmente proposta). As partículas
podem se mover de sítio a sítio ao longo das arestas da rede, obedecendo a regras previamente estabelecidas, que representam entidades físicas tais como energia, momento linear, etc. Este movimento
sobre a rede é similar ao das moléculas de um gás, dando origem ao nome “gás de rede“. O sucesso
do método foi imediato sendo, então, utilizado em inúmeros trabalhos que estudaram avalanches em
pilhas de areia [82, 83, 84], velocidades dos fluxos granulares [85], fluidos Newtonianos [86, 87, 88]
e materiais granulares em geral [89, 90, 91]. Como o modelo LGA utiliza probabilidades, ele às
vezes aparece na literatura com o nome de Automato Celular de Gás de Rede Probabilístico (PLGA).
A seguir mostramos dois exemplos simples de utilização do PLGA.
29
Metodologia - Automata Celulares
30
O modelo Tetris
Para a Física Estatística, vários estados microscópicos podem levar a um mesmo estado macroscópico. Semelhantemente, para um sistema granular, um grande número de estados microscópicos
pode fornecer uma determinada densidade macroscópica. Como citado anteriormente (equação 2.4),
a densidade de compactação de um meio granular seco apresenta uma lei do inverso do logarítmo
com o número de “tapinhas”. O modelo Tetris [92] é um modelo computacional em que obtém-se um
“pacote granular” em uma configuração estável através da simulação computacional da formação de
uma pilha. Várias configurações finais para um pacote granular podem ser obtidas para os mesmos
tipos e quantidades de partículas colocadas numa rede. É um modelo similar ao jogo “Tetris”, muito
comum nos computadores de hoje, no qual grãos vizinhos podem fazer parte de diferentes pacotes
dependendo de suas orientações geométricas.
O modelo Tetris aborda a formação de um pacote granular numa rede bidimensional, em que as
partículas movem-se na rede, somente podendo ocupar os nós da rede e movimentando-se sempre
sobre influência da força da gravidade (sentido descendente da rede). Isso obriga as partículas a
se moverem sempre para baixo, isto é, para o fundo do pacote. No modelo Tetris a rede é estável e
apenas as partículas são dotadas de movimento (a única força atuante nas partículas é a gravitacional),
sendo que somente uma partícula se move a cada iteração. A escolha de qual partícula entrará na rede
e em que posição da rede ela será inserida é feita aleatóriamente. Um software gera uma seqüência de
números pseudo-aleatórios que são utilizados para efetuar estas escolhas. Uma vez inserida na rede,
a partícula só poderá se mover para uma das duas posições inferiores a que esta se encontra na rede.
Novamente através do gerador de números pseudo-aleatórios será efetuada a escolha de qual será a
nova posição que a partícula irá ocupar. A figura 4.1(a) e (b) mostram as representações gráficas de
dois instantes diferentes do modelo Tetris, onde uma partícula é inserida na rede e começa a se mover.
Uma partícula mover-se-á na rede até que esta chegue ao final da rede ou até que esta encontre outras
partículas já previamente dispostas e estáveis na rede impedindo, assim, que a partícula continue a se
mover, conduzindo-a à estabilidade. Para o caso em que já existem partículas na rede, são executadas
iterações que testam o movimento da partícula em relação às partículas que já ocupam uma posição
na rede.
Uma variação desse modelo [36] consiste de uma rede com dimensões que podem ser alteradas
e partículas de três formatos distintos. Como as partículas tem formatos distintos, o movimento de
cada partícula em relação às outras partículas também será diferente, ou seja, partículas de formatos
diferentes interagem diferentemente em sua dinâmica. A figura 4.1(c) mostra uma rede já povoada
com algumas partículas. Pode-se perceber a diferença entre os três tipos de partículas que estão
dispostos na rede. Nota-se na figura 4.1(c) que algumas partículas podem parecer instáveis na atual
configuração da rede, mas convém lembrar que as partículas só podem se mover pela rede, que na
figura 4.1, é representada pelas linhas oblíquas. Desta forma, algumas partículas, apesar de parecerem
instáveis, permaneceram estáveis na rede. É devido ao fato de restarem vazios na rede que se explica o
fato de que, ao submetermos um pacote granular como o da figura 4.1(c) à uma determinada vibração,
nota-se que o pacote tem seu volume reduzido, ou seja, este sofre uma compactação. Tal consideração
30
4.2 Automata Celulares
31
Fig. 4.1: Representação gráfica do modelo Tetris. Evolução temporal desse modelo, (a) e (b). Vários
tipos de partículas no modelo Tetris (c). [36]
pode ser facilmente demonstrada na prática, para isto basta derramar açúcar dentro de um pote. O
açúcar ao ser derramado no pote, formará uma pilha cônica e o encherá. Se ao cessar o derramamento
de açúcar dentro do pote forem aplicados tapinhas na lateral do pote verifica-se que o açúcar parece
diminuir dentro do pote. O que acontece na verdade é que o açúcar, como qualquer outro meio
granular, sofre compactação pela ação da vibração. O fato é que a vibração provoca um rearranjo
das partículas que antes estavam estáveis formando uma nova configuração no pacote, tornando-o
mais compacto que anteriormente. Durante tal rearranjo os espaços previamente deixados na rede
serão ocupados por uma partícula que estava em uma posição adjacente. O arranjo final é um pacote
granular mais denso que o inicial.
O modelo de Petri e Oliveira
O modelo de Petri e Oliveira [1] consiste na elaboração de uma malha horizontal, onde as partículas granulares são dispostas de forma a se arranjarem de uma forma estável. Porém, apesar de
inicialmente as partículas se encontrarem estáveis, existem buracos ou lacunas na malha e quando
se submete o pacote a um movimento vibracional qualquer, as partículas se movem pela malha provocando um rearranjo na malha. Este rearranjo interfere tanto no tamanho quanto na posição das
lacunas.
Quando uma lacuna se situa sob uma partícula pertencente à linha imediatamente superior à linha
da primeira e se a lacuna é maior ou igual ao tamanho da partícula, a partícula se move da malha
superior para a inferior preenchendo a lacuna. Tal movimento, unicamente descendente, provoca um
aumento na densidade da malha inferior e, conseqüentemente, do pacote granular como um todo. A
figura 4.2 mostra uma representação gráfica de três instâncias do modelo de Petri e Oliveira.
Nota-se na figura 4.2 que as partículas podem se mover livremente pela malha horizontal e,
31
Metodologia - Automata Celulares
32
Fig. 4.2: Representação gráfica do modelo Petri e Oliveira. [36]
quando possível, podem se mover também na vertical. Para um dado movimento vibratório, as partículas se moverão mais ou menos rapidamente de acordo com a amplitude e freqüência do movimento
a que estas estão submetidas. As colisões entre partículas também são consideradas neste modelo,
pois estas influem na posição que as partículas irão ocupar.
32
Capítulo 5
Padrões em Meios Granulares Densos - Dados Experimentais
5.1 Introdução
Em um trabalho experimental realizado no Departamento de Física da Universidade Federal de
Viçosa, estudou-se a formação de padrões na interface entre dois tipos de materiais granulares densos
[91, 93]. Neste experimento, um tipo de grão é injetado em uma monocamada de outro tipo de
grão em regime quase-estático. O experimento foi realizado confinando-se os grãos numa célula de
Hele-Shaw. Como veremos mais adiante, padrões váriados e inesperados foram observados devido
ao deslocamento de um meio granular no outro. Esses padrões variam desde padrões circulares
até padrões dentríticos. Os resultados parecem ter alguma analogia com a formação de dendritos,
quando se injeta um fluido viscoso noutro. Não foi encontrado na literatura nenhum resultado para
deslocamento grão-grão em célula de Hele-Shaw, o que torna este estudo original e desafiador. Este
tipo de experimento é muito utilizado no estudo da interação fluido-fluido, mas esta é a primeira vez
que este tipo de experimento foi feito com materiais granulares.
5.2 Célula de Hele-Shaw
Muito do estudo experimental de sistemas granulares é feito utilizando um dispositivo simples
conhecido como Célula de Hele-Shaw. Este dispositivo, também muito empregado no estudo dos
fluidos convencionais, consiste de duas placas fixas, com pelo menos uma delas feita de material
transparente (vidro, acrílico), dispostas paralelamente. A separação entre as placas depende do estudo
que se deseja fazer. No caso dos sistemas granulares, ela possui uma separação da ordem do diâmetro
dos grãos, e é amplamente utilizada quando se deseja realizar experimentos quase-bidimensionais.
33
34
Padrões em Meios Granulares Densos - Dados Experimentais
Fig. 5.1: Célula de Helle-Shaw utilizada na montagem experimental[93]
5.3 Montagem Experimental
Na montagem experimental foram utilizadas duas placas quadradas de vidro para se montar uma
célula de Hele-Shaw, disposta na posição horizontal [93]. A placa inferior possui as dimensões
(1,30x1,30x0,01)m, ao passo que a placa superior, com dimensões (0,80x0,80x0,01)m possui um
furo central de 6 mm de diâmetro, através do qual os grãos são injetados. As duas placas são colocadas na horizontal e mantidas separadas por espaçadores localizados nas bordas da placa inferior. Uma
monocamada circular de grãos com densidade uniforme é formada sobre a placa inferior e a placa
superior é colocada sobre os espaçadores. Placas de granito são colocadas sobre a placa superior para
evitar o movimento desta na direção vertical, durante a realização do experimento. Um segundo tipo
de grão é, então, injetado manualmente através do orifício na placa superior, com a ajuda de uma
bastão de teflon (TFE), cujo diâmetro é exatamente igual ao do orifício central, deslocando assim, os
grãos da camada inicial. Os grãos são injetados um a um de uma maneira quase estática e, no início,
deslocam tipicamente três grãos do substrato inicial. O deslocamento é feito por meio de choque inelástico de esferas rígidas ou macias considerando-se trajetórias comuns entre duas colisões. Os grãos
injetados jamais atingem as bordas da célula de Hele-Shaw. A camada inicial foi formada de duas
maneiras diferentes: completamente ordenada, em um arranjo hexagonal compacto (figura 5.2(a))
ou desordenada (figura 5.2(b)). O experimento foi realizado utilizando-se diferentes combinações de
grãos e grãos de diferentes tamanhos. Além de testar o efeito de se ordenar ou não a monocamada
inicial, testou-se também o efeito da variação do espaçamento entre as placas. Esse espaçamento
sempre foi ligeiramente maior que diâmetro do maior grão utilizado em cada experimento.
No experimento estudou-se a distribuição de tensões nos meios granulares. Porém, antes da injeção do segundo tipo de grão, um líquido (óleo de soja) com o mesmo índice de refração do material
fotoelástico (foram utilizados esferas de vidro Pyrex) é injetado entre as duas placas de vidro. Todo o
arranjo é iluminado por baixo com luz polarizada e monitorado por cima, através de um polarizador
cuja direção de polarização é perpendicular à do primeiro polarizador. O líquido é necessário para
que o espalhamento de luz nas superfícies dos grãos seja eliminado. Durante o desenvolvimento do
padrão filmou-se e fotografou-se o experimento em intervalos de tempo iguais, correspondendo à
quantidades iguais de grãos injetados. Assim pode-se acompanhar a evolução na formação da interface entre os dois tipos de grãos. As filmagens foram feitas por baixo da célula, através de um espelho
34
5.3 Montagem Experimental
35
Fig. 5.2: Monocamada inicial com esferas de plástico (5,9±0,1)mm:
desordenada[93]
(a) ordenada e (b)
e as fotos foram feitas por cima da célula. Para poder filmar com melhor resolução os experimentos
em que utilizou-se esferas de aço, usou-se uma fonte de luz polarizada e colocou-se um polarizador
cruzado numa câmera CCD utilizada para filmar os experimentos. Dessa forma, eliminou-se os reflexos das esferas de aço, conseguindo uma boa qualidade nas imagens. Pode-se, então, observar a
interface dos meios utilizados em cada experimento com muita clareza . As fotos foram em formato
slide. Todos os reflexos do ambiente foram eliminados. As fontes de luz foram ajustadas para que
se pudesse visualizar a segunda camada formada em alguns experimentos. Diferentes experimentos foram feitos variando-se o espaçamento entre as placas de vidro para um dado par de sistemas
granulares e variando-se os grãos usados para um determinado espaçamento das placas.
O filme de slide foi projetado em tamanho real e desenhado manualmente o contorno da borda dos
padrões obtidos nos experimentos. Em seguida, estes contornos foram digitalizados via um scanner
e as imagens tratadas para serem utilizadas por um software próprio. Este procedimento provou ser
mais eficiente do que tentar detectar diretamente a borda dos padrões utilizando-se um software de
processamento de imagens. O software fornece dois resultados. Primeiro, calcula o centro de massa
da figura que representa a borda do padrão e determina a distância de cada ponto da borda até o centro
de massa anteriormente encontrado. Segundo, calcula o raio de giração (Rg ) da borda dos padrões,
definido como:
s
I
Rg =
,
(5.1)
M
onde I é o momento de inércia e M a massa total. Como todas as esferas possuem a mesma massa,
temos:
s
1 X 2
Rg (N ) =
(ri ),
(5.2)
N
onde N é o número de esferas e ri é a distância da esfera i ao ponto (eixo) em relação ao qual se
calcula o raio de giração. O raio de giração (Rg ) representa a distância radial a um eixo que passa
pelo centro de massa, na qual a massa de um corpo poderia ser concentrada, sem alterar a sua inércia
rotacional em relação a esse eixo. Assim, pode-se traçar os gráficos do raio de giração (Rg ) em
35
36
Padrões em Meios Granulares Densos - Dados Experimentais
função do número de partículas no interior do padrão (N) e os gráficos do número de partículas na
borda do padrão (N p ) em função do número de partícula no interior do padrão (N), para alguns dos
experimentos realizados. Nestes casos, tanto N p quanto N são dados em números de pixels na figura
digitalizada.
A distância de cada ponto da borda ao centro de massa foi, então, utilizada pelo software Origin
(Microcal) para se fazer o cálculo da Transformada de Fourier (FFT - Fast Fourier Transformation)
do padrão. Com este cálculo pode-se evidenciar os picos de freqüência.
5.4 Resultados Experimentais
Os resultados mostraram que os padrões formados pela interface entre os dois tipos de grãos
apresentam características que não dependem nem do tipo de grãos utilizados e nem da presença ou
não do líguido utilizado entre as placas para eliminar o espalhamento de luz nas superfícies dos grãos.
A figura 5.3 mostra alguns padrões regulares formados e a figura 5.4 mostra alguns padrões irregulares
formados. Observe que nestes últimos a formação de alguns “dedos” predomina sobre a formação de
outros, gerando pontas de tamanhos diferentes, dai a denominação de padrões irregulares.
Observou-se que os padrões formados mudam de acordo com o espaçamento utilizado para um
mesmo par de grãos. Quanto menor é o espaçamento entre as placas, mais irregular é o padrão, e
quanto maior é o espaçamento, mais regular é o padrão formado. Ou seja, mantendo-se o mesmo par
de grãos uma mudança morfólogica de padrões irregulares para padrões regulares ocorre quando o
espaçamento entre as placas vai aumentando. A transição de padrões com dedos até padrões arredondados se dá de modo contínuo.
Um diagrama morfológico que representa os diferentes tipos de padrões obtidos em função do
tamanho do grão da camada inicial e do espaçamento entre as placas da célula é mostrado na figura
5.5(a). As regiões onde ocorrem as mudanças na morfologia do padrão estão delimitadas pelas linhas
verticais. Cada um dos pontos mostrados no diagrama representa um experimento realizado naquelas
condições do diagrama. Os três padrões mostrados no diagrama são representativos dos padrões
obtidos em cada uma daqulelas três regiões. Não importa qual o tipo de grão (plástico, vidro, aço,
canjiquinha) utilizado como monocamada inicial, sempre teremos um diagrama similar ao mostrado
na figura 5.5(a), A delimitação de cada região é função apenas do diâmetro dos grãos. Quando a
monocamada inicial é feita com esferas de isopor, e somente nesse caso, foi observado, que existe
uma divisão, em todas as direções, dos “dedos” que são formados. A figura 5.5(b) mostra em detalhes
a evolução de um dedo com sua divisão (tip-splitting). Como as esferas de isopor foram as únicas
“esferas macias” utilizadas como monocamada inicial, suspeita-se que a divisão de dedos ocorra
devido a grande deformação que estas esferas sofreram durante o experimento. Essa deformação fez
com que as esferas logo à frente da interface formassem um arranjo mais compacto, influenciando o
movimento das esferas que foram injetadas na monocamada.
Os padrões mais irregulares, com a presença de “dedos” foram formados apenas quando o grão
injetado é maior que o grão que compõe a monocamada inicial. Neste caso, os “dedos” foram extre36
5.4 Resultados Experimentais
37
Fig. 5.3: Padrões Regulares:(a) esferas de plástico ((5,9±0,1) mm) em cilindros cerâmicos ((4,0±0,2)
mm; (b) esferas de aço ((3,94±0,03) mm) em esferas de chumbo ((2,7±0,1) mm); (c) esferas de aço
((3,94±0,03) mm) em canjiquinha (aproximadamente 1 mm); (d) esferas de plástico ((5,9±0,1) mm)
em esferas de aço ((3,94±0,03) mm). [91, 93]
37
38
Padrões em Meios Granulares Densos - Dados Experimentais
Fig. 5.4: Padrões Irregulares:(a) esferas de aço ((3,94±0,03) mm) em esferas de isopor polidisperso ((2,9±0,6) mm); (b) esferas de aço ((3,94±0,03) mm) em esferas de chumbo ((2,7±0,1)
mm); (c) esferas de aço ((3,94±0,03) mm) em esferas de vidro ((1,80±0,01) mm); (d) esferas de
aço ((3,94±0,03) mm) em esferas de vidro ((1,80±0,01) mm) mais óleo de soja.[91, 93]
38
5.4 Resultados Experimentais
39
Fig. 5.5: (a) Diagrama morfológico representativo dos padrões. Os dados do diagrama são para
esferas de aço ((3,94±0,03)mm) injetadas numa monocamada de isopor (diâmetro variando de 0,5mm
a 4,0mm e diâmetro médio de (2,9±0,6)mm);(b) Seqüência da divisão dos dedos (tip-splitting) numa
monocamada de isopor.[93]
39
40
Padrões em Meios Granulares Densos - Dados Experimentais
Fig. 5.6: Evolução temporal da Transformada de Fourier para padrões dendríticos (a) e para padrões
circulares (b) [93].
mamente pronunciados, resultando num padrão bastante irregular (5.4(b) e (c)). Quando as esferas
injetadas são do mesmo diâmetro das esferas que compõem a monocamada inicial ou menores que
estas, os padrões são quase que circulares, não apresentando a formação de “dedos”. Esses resultados
parecem não depender de como a monocamada inicial foi preparada, isto é, se esferas dessa camada
estavam ordenadas ou desordenadas.
Ao fazer a análise da Transformada de Fourier dos padrões, observou-se a seleção de modos
para os padrões dendríticos. À medida que os padrões dendríticos crescem, a amplitude de alguns
números de ondas cresce e ao mesmo tempo o vetor de onda k= 2π
de maior amplitude diminui, como
λ
consegüência do aumento do comprimento da borda do padrão. A figura 5.6 mostra esse resultado.
Com relação ao raio de giração Rg , definido pela equação 5.2 e ao número de partículas na borda
de um padrão, temos que ambos obedecem, respectivamente, as seguintes leis de potência:
Rg (N ) ∼ N a
e
Np (N ) ∼ N b .
(5.3)
Os valores de a obtidos são 0,49 ≤ a ≤ 0,52 e os de b são 0,47 ≤ b ≤ 0,61. O limite inferior
corresponde a padrões arredondados e o limite superior a padrões dendríticos (figuras 5.7 e 5.8). O
expoente a (raio de giração) está relacionado com a dimensão fractal D do padrão (ver equação 3.3)
a= D1 . O valor obtido para o expoente levou a D entre D=1,92 e D=2,04. Isso pode indicar que o
40
5.4 Resultados Experimentais
41
Fig. 5.7: Raio de Giração Rg para padrões dendríticos [93].
Fig. 5.8: Número de partículas na borda do padrão Np (b) para padrões dendríticos [93].
padrão não é fractal, já que D∼2,00. Na verdade, o cálculo do raio de giração desprezando o tamanho
dos grãos, reduzindo-os ao seu centro de massa, não permite uma avaliação clara da dimensão fractal.
Essa questão será aprofundada quando da discussão dos resultados do nosso modelo. Observa-se no
experimento, que os valores dos expoentes a e b aumentam à medida qu os padrões vão ficando mais
irregulares e os “dedos” mais evidentes.
Nos padrões onde existem as formações dendríticas, salvo poucas exceções, as esferas injetadas
se cristalizam espontaneamente numa rede triangular, apresentando diversos contornos de grão, que
formam regiões com um arranjo hexagonal compacto. A diferença entre as regiões é somente a
direção de alinhamento do arranjo hexagonal. Na direção dos “dedos”, as esferas estão posicionadas
ao longo da direção principal da rede, de modo que a força aplicada a uma esfera é transmitida
diretamente à seguinte e assim sucessivamente. Isso promove o movimento das esferas nessa direção
privilegiando o crescimento dos dedos. Na região entre dois “dedos” adjacentes, o posicionamento
41
42
Padrões em Meios Granulares Densos - Dados Experimentais
das esferas se dá numa direção que faz 30◦ com a direção dos “dedos”. Essa direção é tal que a força
aplicada a uma esfera é transmitida a duas direções diferentes dificultando a formação de dedos (figura
5.9). Quando o espaçamento da célula é muito grande ou os grãos que compõem a monocamada
inicial são maiores que os injetados, esses possuem maior liberdade de movimento tanto no plano
da célula, quanto na vertical (os grãos podem se sobrepor). Isso inviabiliza a formação de arranjos
hexagonais compactos o que parece impedir a formação de “dedos”.
Pode-se ver também da figura 5.9, que existe uma região completamente desordenada na interface
entre os grãos injetados e os grãos que formam a monocamada inicial. Isso acontece sempre que os
grãos injetados são maiores que os grãos que formam a monocamada inicial, desde que espaçamento
entre as placas da célula de Helle-Shaw seja suficiente para permitir o movimento ascendente dos
graõs menores. Um vez que esses grãos estão em contato com ambas as placas da célula, sua resistência ao movimento é muito maior que a resistência ao movimento dos outros grãos que compõem
a monocamada inicial. Portanto, essa região impede o movimento dos grãos injetados. Em analogia
com os padrões formados no deslocamento de um fluido em outro, essa região de alta resistência
para a frente de propagação corresponde a um fluido com alta viscosidade, conduzindo à formação
de padrões dendríticos.
Em resumo, tem-se que os padrões formados podem ser regulares ou irregulares, dependendo do
espaçamento entre as placas da célula de Helle-Shaw e do diâmetro das esferas injetadas e das que
compõem a monocamada inicial. Em alguns padrões irregulares, os “dedos” formados são extremamente alongados em relação aos outros no mesmo padrão, enquanto determinados padrões apresentam a divisão dos “dedos” e outros não. Os processos pelos quais os padrões se desenvolvem, ora
irregulares, ora regulares, ainda não são completamente conhecidos, mas a formação de regiões com
arranjos hexagonais compactos fornece um indício para a formação dos “dedos”.
42
5.4 Resultados Experimentais
43
Fig. 5.9: Orientação das esferas formando um padrão. Os dedos, em (a) parecem estar orientados ao
longo da direção mostrada em (b), enquanto a região entre dedos adjacentes, os grãos estão orientados
ao longo da direção mostrada em (c). Esfera de plástico de (5,9±0,1) mm numa monocamada com
esferas de aço de (3,94±0,03) mm e espaçamento entre as placas de (6,3±0,1) mm [93].
43
44
Padrões em Meios Granulares Densos - Dados Experimentais
44
Capítulo 6
Simulação Numérica de Padrões Em Meios Granulares Densos.
6.1 Introdução
Como se pôde observar, o experimento realizado pelo grupo de sistemas complexos do Departamento de Física da Universidade Federal de Viçosa (UFV) [91, 93] revelou padrões ricos formados
na interface entre dois tipos de materiais granulares densos. Esses padrões possuem características
inéditas em meios granulares densos. São padrões ora circulares, ora dendríticos, dependendo de
fatores tais como diâmetro de grãos utilizados como monocamada inicial e espaçamento entre as placas da célula de Helle-Shaw. No intuito de tentar entender melhor esse comportamento dos sistemas
granulares densos, desenvolvemos um modelo para realizarmos simulação computacional. O modelo
desenvolvido baseia-se em automata celular de gás de rede (PLGA).
6.2 O Modelo
A versão do PLGA do experimento da célula de Helle-Shaw se dá em uma rede triangular bidimensional cujas arestas valem a, onde são distribuidos dois tipos de discos: um pequeno de diâmetro a e o outro grande cujo diâmetro é 2a. Esses discos fazem o papel dos grãos. Nessa rede,
cada disco fica posicionado sobre o nó da rede. Desta forma, cada disco pequeno ocupará um sítio
da rede, que representa seu centro de massa, e metade de cada uma das seis arestas vizinhas a este
sítio, ao passo que o disco grande ocupa sete sítios da rede, um que representa seu centro de massa
e os seis outros vizinhos mais próximos, que representaram a borda do disco grande. A cada disco
é permitido mover-se somente sobre as arestas da rede. Assim, para um disco, em um determinado
sítio, é permitido somente seis sentidos diferentes de movimento, que é o movimento para um dos
seis primeiros sítios vizinhos (figura 6.1). As regras do movimento são definidas de modo a simular
propriedades dinâmicas ou mecânicas dos grãos, tais como elasticidade das partículas, inércia, atrito
entre eles ou mesmo resistência ao movimento dos grãos devida ao atrito entre eles e as placas da
célula e também devido à compressão dos grãos.
Discos de um determinado tamanho (grandes ou pequenos) são dispostos sobre a rede ocupando
todos os sítios desta, formando assim, um substrato. Então, discos com raios diferentes dos discos
45
46
Simulação Numérica de Padrões Em Meios Granulares Densos
Fig. 6.1: Rede triangular: Disco pequeno na rede (a), Disco grande na rede (b) e os seis sentidos
possíveis para o movimento de um disco (c).
do substrato são inseridos na rede pelo sítio central, empurrando os discos já dispostos sobre a rede.
Se o sítio onde é colocado o disco estiver ocupado, o novo disco da rede empurra os discos de sua
vizinhança e estes empurram outros discos, e assim sucessivamente, até encontrar um sítio da rede
vazio ou chegar na extremidade da rede e ser retirado. A ordem dos discos que são empurrados é
definida aleatoriamente, podendo ter mesma probabilidade nas seis direções, ou induzir uma dada
direção preferencial aumentando a probabilidade desta, resultando assim nas diversas morfologias da
interface, associadas às diferentes probabilidades de movimentação dos discos introduzidos na rede.
As probabilidades com que os discos são empurrados obedecem as seguintes características:
i- disco grande empurrando disco grande: O movimento do disco empurrado se dá na direção
da linha que une os centros de massa, com probabilidade pg1 , ou na direção do movimento do disco
incidente, com probabilidade pg2 , tal que pg1 + pg2 =1.
ii- disco grande empurrando disco pequeno ou disco pequeno empurrando disco grande: Nesse
caso, o movimento do disco empurrado se dá na direção do movimento do disco incidente, (com
probabilidade p1 ) ou fazendo um ângulo de sessenta graus com essa linha (com probabilidade p2 ), tal
que novamente p1 + p2 =1.
iii- disco pequeno empurrando disco pequeno: Nesse caso, o movimento do disco empurrado
pode se dar em três direções: na direção da linha que une os centros de massa (com probabilidade
pp1 ) ou fazendo um ângulo de ±60◦ com essa linha (com probabilidade pp2 e pp3 , respectivamente),tal
que pp1 + pp2 + pp3 =1.
Tanto a primeira quanto a segunda regra se devem ao fato de que uma colisão entre os discos pode
ocorrer de duas maneiras: ou frontalmente, ou tangencialmente. No caso da colisão entre dois discos
grandes, temos: se a colisão for frontal, a probabilidade de o disco empurrado continuar na direção do
movimento é sempre 100%, pois nesse caso, a direção do movimento do disco incidente e a direção
da linha que une os centros de massa coincidem. Essa condição implica na lei da conservação do
momento linear. Quando a colisão se der tangencialmente, a probabilidade pg1 do movimento do
disco empurrado se dá na direção da linha que une os centros de massa dos discos implica na lei da
conservação do momento linear. De maneira semelhante, podemos interpretar a segunda regra. É só
termos em mente que ela se aplica a colisões entre discos de tamanho diferentes.
A terceira regra diz respeito à colisão entre discos pequenos. Nesse caso, o disco empurrado
46
6.3 Resultados
47
Fig. 6.2: Colisão entre discos pequenos.
sempre terá a probabilidade de mover-se em três direções, seja numa colisão frontal, ou numa colisão
tangencial. O sentido de movimento do disco empurrado, que se dá na direção da linha que une os
centros de massa dos dois discos (probabilidade pp1 ), é o sentido que corresponde à lei de conservação
do momento linear. As figuras 6.3, 6.4 e 6.2 exemplificam as três regras mencionadas.
6.3 Resultados
A simulação númerica foi realizada utilizando-se primeiramente um substrato formado inicialmente com discos grandes e os discos pequenos são então inseridos um a um pelo sítio central da
rede. Depois o processo foi repetido inicialmente distribuindo uniformemente os discos pequenos
sobre a rede e depois inserindo discos grandes um a um pelo sítio central. Em nenhum dos dois
processos é permitido a qualquer disco sobrepor outro.
6.3.1
Resultados com monocamada inicial de discos grandes
Neste caso, primeiramente a rede é preenchida com discos de diâmetro 2a. Em seguida são
colocados, um a um no sítio central, discos de diâmetro a. Observa-se que, quando um disco grande
empurra outros discos grandes a rede vai se povoando de sítios desocupados. Cada disco grande
que é retirado da rede pela extremidade dessa, geram-se sete sítios desocupados. Por esse motivo,
achamos razoável levar em consideração a chance de um disco pequeno ocupar um sítio vazio, ao
invés de sempre tentar empurrar um disco grande. Parece razoável pensar que, na natureza, os grãos
sempre tentam escapulir para um lugar com ausência de grãos e portanto com ausência de forças de
47
48
Simulação Numérica de Padrões Em Meios Granulares Densos
Fig. 6.3: Colisão entre discos grandes: colisão frontal (a) e colisão tangencial (b).
Fig. 6.4: Colisão entre discos grandes e discos pequenos: colisão frontal (a) e colisão tangencial (b).
48
6.3 Resultados
49
resistência.
Foram obtidos vários resultados com morfologias diferentes, de acordo com a variação das seguintes probabilidades:
i- probabilidade pv de o disco pequeno deslocar-se para o sítio vazio ao invés de empurrar um
outro disco,
ii- probabilidade de o disco pequeno deslocar-se para frente,
iii- probabilidade ppg de o disco pequeno mover um disco grande.
O primeiro item está de acordo com o discutido anteriomente. O segundo item está de acordo
com as probabilidades discutidas no modelo. Quanto ao terceiro item, temos que ele está de alguma
forma relacionado com o item “ i ”. Quando a um disco pequeno não for permitido empurrar um
determinado disco grande, haverá três outras possibilidades: ocupar um sítio vazio, ou empurrar um
outro disco pequeno, ou empurrar um outro disco grande. Em todas as simulações a rede estava
inicialmente preenchida com discos grandes (representados nas figuras a seguir com a cor vermelha)
e foram colocadas entre 4.000 e 6.000 discos pequenos (representados nas figuras seguintes com a
cor azul).
As figuras 6.5, 6.6 e 6.7 mostram os padrões obtidos, quando se considera a probabilidade relacionada no item “ i ” igual a pv =100%, isto é, o disco pequeno sempre ocupa um sítio vazio, e a
relacionada no item “ ii ” também igual a 100%. Este caso implica em fazer pp1 =1 na figura 6.2.
Ou seja, existe conservação do momento linear. A diferença é somente devido ao terceiro item. Observamos que quando a probalilidade do disco pequeno empurrar o disco grande é alta esse abre
“caminhos” para os discos pequenos nos seis sentidos possíveis do movimento e o resultado mostra
os discos pequenos percorrendo caminhos quase que retilíneos ao longo desses seis sentidos até atingirem a extremidade da rede e serem retirados dela (figura 6.5). Caso a probabilidade do item “ iii ”
seja 100%, os caminhos são perfeitamente retilíneos.
À medida que a probabilidade do disco pequeno mover um grande diminui, existe uma tendência
de os discos pequenos se aglomerarem em torno do sítio central da rede. Nesse caso, alguns sentidos
tornam-se preferenciais à medida que os discos pequenos, via esses caminhos, atingem a borda da
rede e são retirados dela. Os sentidos que se tornaram ”menos preferenciais“ têm a tendência de se
estagnarem no interior da rede. Isso é semelhante ao fluxo de trânsito de automóveis numa grande
cidade. A via congestionada tende a se estagnar e o fluxo de automóveis a se desviar para as vias
menos congestionadas. Neste modelo, poderíamos interpretar esta queda na probabilidade de os
discos pequenos moverem os grandes como um aumento da resistência ao movimento oferecida pelos
discos grandes. Como as colisões são inelásticas, a energia da colisão entre um disco pequeno e um
grande não seria suficiente para se transmitir de disco grande a disco grande até atingir o mais externo,
retirá-lo da rede e, então, abrir caminho para os outros discos grandes se moverem um a um e, então,
cederem “lugar” aos discos pequenos. Essa resistência, no caso do experimento, poderia ser devido
ao atrito dos grãos com as placas da célula de Helle-Shaw, ou devido à inércia dos grãos grandes,
ou até mesmo devido a pouca energia dada aos grãos pequenos, quando introduzidos na célula não
permitindo aos grãos pequenos moverem grãos que pertencessem a um grande aglomerado compacto.
Outro aspecto verificado é qual a influência da probabilidade de o disco pequeno deslocar-se para
49
50
Simulação Numérica de Padrões Em Meios Granulares Densos
Fig. 6.5: Simulação de discos pequenos em um substrato com discos grandes. A rede é de L=111x111,
pv =100%, pp1 =100% e ppg =83%
Fig. 6.6: Simulação de discos pequenos em um substrato com discos grandes. A rede é de L=111x111,
pv =100%, pp1 =100% e ppg =33%
50
6.3 Resultados
51
Fig. 6.7: Simulação de discos pequenos em um substrato com discos grandes. A rede é de L=111x111,
pv =100%, pp1 =100% e ppg =17%
Fig. 6.8: Simulação de discos pequenos em um substrato com discos grandes. A rede é de L=111x111,
pv =17%, pp1 =63% e ppg =2%
o sítio vazio ao invés de empurrar um outro disco (item “ i ”). As figuras 6.8 e 6.9 mostram os resultados dessas simulações. Nessas duas figuras os discos pequenos possuem as mesmas probabilidades
de se moverem para frente (menor que 100%) e possuem as mesmas probabilidades de moverem
os discos grandes. Podemos relacionar o fato de os discos pequenos procurarem um espaço vazio
para se alojarem à reflexão desses com os discos grandes devido a uma possível perda de energia
durante a colisão inelástica. Podemos observar que, morfologicamente, os padrões são semelhantes e
circulares.
Quando se mantém fixa a probabilidade de o disco pequeno se mover para frente, porém com
valor menor que 100% e se varia a probabilidade de o disco pequeno mover um disco grande temos
padrões circulares que se assemelham ao caso em que variamos somente a probabilidade de os discos
pequenos ocuparem espaços vazios. Esses resultados estão representados nas figuras 6.10 e 6.11. Po51
52
Simulação Numérica de Padrões Em Meios Granulares Densos
Fig. 6.9: Simulação de discos pequenos em um substrato com discos grandes. A rede é de L=111x111,
pv =83%, pp1 =63% e ppg =2%
rém, comparando-os com o primeiro caso, onde a probabilidade de os discos pequenos moverem os
discos grandes também são variáveis (figuras 6.5, 6.6 e 6.7) observamos uma diferença na morfologia
dos padrões formados. Eles se modificam de padrões em forma de estrela para padrões circulares.
Como podemos observar, naquele caso existe uma forte probabilidade (100%) de os discos pequenos
conservarem o momento linear durante o movimento. Eles estão sempre se movendo “para frente“.
Isso parece ser um fator diferenciador na formação dos padrões. Finalmente, fixamos as probalilidades de os discos pequenos ocuparem um espaço vazio e de empurrarem um disco grande e variamos
a probabilidade de o disco pequeno se mover para frente, porém com valor sempre menor que 100%.
Os resultados estão representados nas figuras 6.12 e 6.13. Na figura 6.12 as probabilidades de os
discos pequenos ocuparem um sítio vazio e de moverem um disco grande são as mesmas apresentadas para a figura 6.10. A diferença nas probabilidades de o disco pequeno mover-se para frente são
pp1 =33% para a figura 6.10 e de pp1 =67% para a figura 6.12. Na figura 6.13 as probabilidades de os
discos pequenos ocuparem um sítio vazio e de moverem um disco grande são as mesmas apresentadas para a figura 6.11, ou seja pv =100% e ppg =83%. A diferença está nas probabilidades de o disco
pequeno mover-se para frente, que são pp1 =33%, para a figura 6.11, e de pp1 =67%, para a figura 6.13.
Novamente, morfologicamente essas figuras são semelhantes.
6.3.2
Resultados com monocamada inicial de discos pequenos
Semelhantemente ao caso anterior, neste, a rede é, primeiramente, preenchida com discos de
diâmetro a. Em seguida são colocados, um a um no sítio central, discos de diâmetro 2a. Nessa fase
da simulação, quando um disco pequeno tenta se mover, ele sempre empurra três discos pequenos, se
ele está com todos os três primeiros sítios vizinhos à frente ocupados por discos pequenos. O mesmo
acontece com os discos grandes. Um movimento desses pode, no máximo, empurrar simultaneamente
três discos grandes, ou três discos pequenos, ou uma pequena combinação que envolva os discos
52
6.3 Resultados
53
Fig. 6.10: Simulação de discos pequenos em um substrato com discos grandes. A rede é de
L=111x111, pv =100%, pp1 =33% e ppg =17%
Fig. 6.11: Simulação de discos pequenos em um substrato com discos grandes. A rede é de
L=111x111, pv =100%, pp1 =33% e ppg =83%
53
54
Simulação Numérica de Padrões Em Meios Granulares Densos
Fig. 6.12: Simulação de discos pequenos em um substrato com discos grandes. A rede é de
L=111x111, pv =100%, pp1 =67% e ppg =17%
Fig. 6.13: Simulação de discos pequenos em um substrato com discos grandes. A rede é de
L=111x111, pv =100%, pp1 =67% e ppg =83%
54
6.3 Resultados
55
Fig. 6.14: Regras de movimento na rede. O disco grande (a) ao avançar no sentido mostrado, deve
empurrar o disco pequeno (b) e também o disco grande (c). No sítio (j) não é permitido um disco
grande.
grandes e pequenos. Porém, como a rede está povoada inicialmente com discos pequenos, esses, ao
atingirem a extremidade da rede e serem retirados, não necessariamente liberam sítios próximos que
possam ser ocupados por um disco grande.
Conforme mencionado anteriormente na definição do modelo, não é permitido em qualquer hipótese aos discos se sobreporem. Isso poderia estar vinculado a algum tipo de deformação dos discos e
como estamos simulando materiais densos não haveria razão para impor tal deformação. Entretanto
essa imposição conduz a uma atenção redobrada durante a movimentação dos discos. Ao se mover
um disco grande, por exemplo, é necessário analisarmos não somente os sítios primeiros vizinhos
do disco, mas também alguns sítios segundos vizinhos ao centro de massa do disco que estão localizados à frente do movimento. É preciso lembrar que os discos possuem dimensões não nulas e ao
se moverem sobre as arestas de um sítio a outro é preciso passar sem tocar noutro disco, senão esse
também deverá ser empurrado, e ao chegar no novo sítio nenhuma de suas partes pode estar sobre
partes de outros discos. Ele deverá estar isolado ou no máximo tangenciando outros discos. A figura
6.14 mostra algumas dessas possibilidades. O disco grande (a) ao mover-se para o sítio seguinte no
sentido indicado, deve empurrar o disco pequeno (b) aleatoriamente, num dos três sentidos indicados. Ao ser colocado na nova posição ele irá sobrepor o disco grande (c). Então esse também deve
ser movimentado aleatoriamente num dos dois sentidos indicados. No momento mostrado na figura
6.14, o sítio (j) não comporta um disco grande, pois esse iria se sobrepor ao disco grande (a). Porém,
esse sítio (j) comporta um disco pequeno que não seria, de imediato, influenciado pelo movimento do
disco grande (a) no sentido indicado.
Dessa forma, quando um determinado disco vai entrar em movimento, primeiramente, é escolhido
aleatoriamente o sentido de movimento. Depois, estuda-se seus primeiros vizinhos (e no caso dos
discos grandes, também seus segundos vizinhos) imediatamente à frente no sentido do movimento.
Os discos nesses vizinhos são retirados da rede e entram aleatoriamente numa fila com seus sentidos
de movimento já definidos de acordo com as regras de movimento. Só então o primeiro disco é
colocado em sua nova posição. O processo é repetido para cada disco da fila até que os discos atinjam
55
56
Simulação Numérica de Padrões Em Meios Granulares Densos
Fig. 6.15: Simulação de 500 discos grandes em um substrato com discos pequenos. A rede é de
L=111x111, pgg =50%, pgp =ppg =ppp =100%, pg1 =20% e p1 =20%
a extremidade da rede e sejam retirados dela ou encontrem um sítio vazio. Durante o movimento é
possível que algum disco da fila volte a colidir com o disco que deu origem ao processo que o colocou
na fila.
As regras do movimento utilizadas são as descritas no modelo (veja figuras 6.2, 6.3 e 6.4). Porém,
introduzimos determinadas probabilidades de discos empurrarem discos e verificarmos qual deveria
ser a influência delas na formação dos padrões. Essas probabilidades são:
i- probabilidade pgp de disco grande empurrar disco pequeno,
ii- probabilidade pgg de disco grande empurrar disco grande,
iii- probabilidade ppg de disco pequeno empurrar disco grande,
iv- probabilidade ppp de disco pequeno empurrar disco pequeno.
Os resultados mostram que essas probablidades combinadas com as impostas pelas regras do
movimento geram padrões que podem apresentar morfologias diferentes e padrões com morfologia
semelhantes. Esses vários padrões são mostrados a seguir.
A figura 6.15 mostra a simulação de uma pequena rede L=111x111. Ela possui 12321 sítios que
foram inicialmente preenchidos com discos pequenos (em azul). Foram em seguida introduzidos
cerca de 500 discos grandes (em vermelho). Para esse padrão formado, foi permitido que durante
as colisões somente cerca de 20% dos discos tanto grandes (probabilidade pg1 ), quanto pequenos
(probabilidade p1 ), prosseguissem seus movimentos no sentido em que estavam sendo empurrados, ou
seja, no sentido de conservar a componente do momento linear transferida a eles. Observe na figura
6.15 que os discos grandes nessas condições chegam perto da fronteira da rede. Ao se modificar
determinadas probabilidades o padrão formado sofre alteração e evidencia mais as pontas. Isso é
mostrado na figura 6.16 onde dessa vez as probabilidades p1 =100%, pgg =100% e ppg =0,1%. Nessa
figura retiramos o substrato de discos pequenos, a fim de realçar o padrão de discos grandes. Essa
prática será adotada nas figuras seguintes.
As figuras seguintes (6.17, 6.18 e 6.19) mostram três padrões diferentes para uma mesma rede
L=311x311 e a introdução de 900 discos grandes. Elas correspondem à transição de um padrão cir56
6.3 Resultados
57
Fig. 6.16: Simulação de 500 discos grandes em um substrato com discos pequenos. A rede é de
L=111x111, ppg =0,1%, pgp =pgg =ppp =100%, pg1 =20% e p1 =100%
cular a um padrão em forma de estrela deformada. Para gerar esses três padrões, variamos apenas a
probabilidade ppg de um disco pequeno empurrar um disco grande. As outras probabilidades permaneceram iguais na formação dos três padrões. Os dois primeiros padrões são similares aos da figura
5.4 (b) e (d). Já o padrão da figura 6.19 se assemelha a um padrão regular de seis pontas. Mostramos
também, na figura 6.20, um padrão irregular formado pela injeção de 3000 discos grandes numa rede
L=311x311. Ele está na transição entre um padrão circular e um padrão regular de seis pontas. Na
formação desse padrão, as probabilidades pgp , pgg , ppp e ppg são todas iguais a 100%. Também foi de
100% a probabilidade p1 de os discos pequenos preservarem a componente do momento linear transferido a eles após a colisão. Entretanto, a conservação da componente do momento linear transferido
aos discos grandes é de 20%, isto é, pg1 =20%.
A seguir apresentamos padrões formados em uma rede L=1111x1111 que possui pouco mais
de 1,2x106 sítios. Vamos mostrar como as probabilidaes interferem na formação dos padrões. Primeiramente, temos a injeção de 10000 discos grandes com a formação de um padrão completamente
circular, um intermediário que é um padrão circular se deformando e, por fim, um em forma de estrêla
um pouco deformada. A diferença na formação dos três padrões está na variação da probabilidade
pg1 , que começa com 100% e vai diminuindo para 15% e 8% respectivamente. As outras probabilidades são todas mantidas em 100%. Esses padrões estão mostrados nas figuras 6.21, 6.22 e 6.23. Este
último padrão (6.23) é semelhante ao padrão obtido experimentalmente e mostrado na figura 5.4(c).
Como podemos observar dessas figuras, a variação da probabilidade pg1 (probabilidade de um
disco grande seguir no sentido em que foi empurrado) altera drasticamente o padrão formado. À
medida que diminuimos a probabilidade pg1 , mantendo fixo o número de discos grandes e as outras
probabilidades, a tendência dos padrões formados é irem deformando o padrão circular e se transformando em padrões pontiagudos, como os mostrados. Essa tendência se revelou verdadeira para
57
58
Simulação Numérica de Padrões Em Meios Granulares Densos
Fig. 6.17: Simulação de 900 discos grandes em uma rede L=311x311, ppg =60%, pgp =pgg =ppp =100%,
pg1 =20% e p1 =100%
Fig. 6.18: Simulação de 900 discos grandes em uma rede L=311x311, ppg =0,1%, pgp =pgg =ppp =100%,
pg1 =20% e p1 =100%
58
6.3 Resultados
59
Fig. 6.19: Simulação de 900 discos grandes em uma rede L=311x311, ppg =30%, pgp =pgg =ppp =100%,
pg1 =20% e p1 =100%
Fig. 6.20: Simulação de 3000 discos grandes em uma rede L=311x311, ppg =pgp =pgg =ppp =100%,
pg1 =20% e p1 =100%
59
60
Simulação Numérica de Padrões Em Meios Granulares Densos
Fig. 6.21: Simulação de 10000 discos grandes em uma rede L=1111x1111, ppg =pgp =pgg =ppp =100%,
pg1 =100% e p1 =100%
Fig. 6.22: Simulação de 10000 discos grandes em uma rede L=1111x1111, ppg =pgp =pgg =ppp =100%,
pg1 =15% e p1 =100%
60
6.3 Resultados
61
Fig. 6.23: Simulação de 10000 discos grandes em uma rede L=1111x1111, ppg =pgp =pgg =ppp =100%,
pg1 =8% e p1 =100%
todos os tamanhos de rede utilizados e também para todos os números de discos grandes inseridos. A
título de ilustração mostramos na figuras 6.24 e 6.25 esta tendência com a simulação de 20000 discos
grandes inseridos na rede L=1111x1111. Em resumo, as probabilidades que se mostram relevantes
na alterações dos padrões de circulares para padrões pontiagudos são pg1 (probabilidade de um disco
grande seguir no sentido em que foi empurrado), como mostrado nas figuras 6.21 a 6.25 e ppg (probabilidade de um disco pequeno empurrar um disco grande), como mostrado nas figuras 6.17 a 6.19.
As outras probabilidades quando variadas, mantendo fixa pg1 e ppg , não apresentaram padrões que
variassem significativamente. Os padrões se apresentaram morfologicamente semelhantes.
Nas simulações, utilizamos redes que variaram do tamanho L=111x111 até o tamanho L=1411x1411.
O limite superior foi imposto pelos tipos de máquinas disponíveis para a simulação. O número de discos grandes inseridos dependia do tamanho da rede, podendo ser 500, 5000, 10000, 30000 e 50000.
Em todos os tipos de redes foram reproduzidos os vários tipos de padrões. A transição de um padrão
a outro se faz de modo contínuo, simplesmente modificando as probabilidades adequadamente. Na
figura 6.26 tentamos exemplificar grosseiramente como é a transição entre os padrões em função da
probabilidade pg1 . As posições das linhas verticais entre as figuras são meramente especulativas, uma
vez que a transição é contínua. Com elas, tentamos simplesmente mostrar as regiões onde, para a maioria das simulações, os padrões pareciam se formar. À medida que a probabilidade pg1 vai diminuindo
e os padrões tendem a ser pontiagudos, os discos tendem a atingir a borda da rede mais rapidamente
(em menos passos de computação). Como são retirados da rede assim que atingem a fronteira, esse
fato limita o número de discos grandes que deve ser inserido no caso de padrões pontiagudos.
A probabilidade pg1 de o disco grande seguir no sentido em que foi empurrado está relacionada
com a componente do momento linear que é transferido ao disco grande quando esse sofre a colisão. Diminuir essa probabilidade significa fazer com que o disco grande redirecione seu movimento
61
62
Simulação Numérica de Padrões Em Meios Granulares Densos
Fig. 6.24: Simulação de 20000 discos grandes em uma rede L=1111x1111, ppg =pgp =pgg =ppp =100%,
pg1 =100% e p1 =100%
Fig. 6.25: Simulação de 20000 discos grandes em uma rede L=1111x1111, ppg =pgp =pgg =ppp =100%,
pg1 =10% e p1 =100%
62
6.3 Resultados
63
Fig. 6.26: Diagrama morfológico obtido por simulação numérica. A transição entre os padrões é
contínua. As linhas verticais são apenas ilustrativas. As probabilidades pg1 onde os padrões são
formados dependem do tamanho de rede utilizado. Todas as outras probabilidades são mantidas fixas
com valores iguais a 100%
para o mesmo sentido do disco que provocou a colisão. É como se ele, após a colisão, tivesse sido
comprimido contra um aglomerado com uma massa inercial efetiva muito grande. Assim, teria a
direção do movimento alterada drasticamente. O fato do sentido do disco que sofreu a colisão tender
a ser a mesma do disco que provocou a colisão, faz com que os discos se movam paralelamente. Isso
aumenta as chances de colisões frontais e, também, a transferência de força de tensão aos discos à
frente, propiciando, assim, a formação das pontas ou “dedos”.
Como a rede é inicialmente povoada com discos pequenos, eles estão, a princípio, sempre à frente
dos discos grandes. Quando um disco pequeno se move, ele tem prossibilidade de empurrar três
discos pequenos à sua frente: Um frontal e os outros dois lateralmente, um a cada lado do disco
frontal. A tendência dos discos laterais é provocar um movimento de semi-círculo para trás, um
de cada lado do disco que se movimentou frontalmente. Assim, quando os dedos começam a se
formar a tendência dos discos pequenos em fluxo retrógrado é de colidirem com os discos grandes
que compõem os dedos dos padrões provocando dessa forma uma turbulência que tende a destruir os
dedos. Portanto, diminuir a probabilidade ppg de o disco pequeno empurrar um disco grande contribui,
se não para formar, pelo menos para ajudar a manter os dedos. O aumento dessa probabilidade deve
beneficiar em parte a destruição dos dedos. É o que obervamos nas simulações.
63
64
Simulação Numérica de Padrões Em Meios Granulares Densos
6.4 Dimensão Fractal e Raio de Giração dos padrões
A fim de podermos entender melhor as propriedades dos padrões formados, vamos estudar o
comportamento do raio de giração Rg e da dimensão fractal D para os padrões. Ao observarmos os
padrões formados, percebemos que eles apresentam uma estrutura muito semelhante a estrutura de
um fractal.
6.4.1
Cálculo da Dimensão fractal
Como já vimos anteriormente, um fractal é caracterizado por uma dimensão fracionária conhecida
com Dimensão Fractal D. Se cobrirmos um fractal com caixas de tamanho (lado) r, de modo a utilizar
o menor número de caixas possíveis, temos que o número de caixas N(r) necessárias para se cobrir o
fractal obedece à lei de potência dada pela equação 3.2, ou seja
N(r) ∼ r-D .
À medida que o tamanho da caixa r vai aumentando, o número de caixas N(r) vai diminuindo.
Quando r atinge o tamanho do fractal, apenas uma caixa é suficiente para cobrí-lo. O maior número
de caixas necessário para cobrí-lo é aquele para o qual r tem as dimensões da menor estrutura do
fractal. Com base nisso, podemos cobrir os padrões formados com caixas cujo menor tamanho seja o
de um disco grande até caixas cujo maior tamanho seja o do próprio padrão. Caso o padrão seja fractal
ele obedecerá a lei de potência acima (equação 3.2). A dimensão fractal D do padrão será obtida da
equação 3.3, que na prática pode ser obtido traçando o gráfico ln(N(r)) versus ln(r). A inclinação da
reta que melhor se ajusta aos pontos, nesse gráfico ln(N(r)) versus ln(r), fornece a dimensão fractal
dos padrões. As figuras 6.27, 6.28, e 6.29 mostram os gráficos ln(N(r)) versus ln(r) para uma rede
L=1111x1111 e cerca de 10000 discos grandes. Essas figuras correspondem, respectivamente, aos
padrões mostrados nas figuras 6.21, 6.22 e 6.23, que são os três padrões típicos representados no
diagrama morfológico da figura 6.26.
Esses padrões foram obtidos variando apenas a probabilidade pg1 . As outras probabilidades são todas iguais a 100% para esses três padrões. As dimensões fractais relativas a cada um dos três padrões
são: D=1,80±0,01 para a probabilidade pg1 =100%, D=1,70±0,01 para a probabilidade pg1 =15% e
D=1,66±0,01 para a probabilidade pg1 =8%. Os gráficos 6.30 e 6.31 são referentes a 20000 discos
grandes na rede L=1111x1111. Eles correspondem, respectivamente, a um padrão que está na transição entre o circular e o de dedos a um padrão bem pontiagudo. Novamente, a única probabilidade que
variou foi pg1 . Para essas figuras, todas as outras probabilidades são novamente 100%. As dimensões
fractais foram D=1,79±0,01 para pg1 =20% e D=1,69±0,01 para pg1 =2%.
Em março de 2008, foi publicado um artigo ([94]) onde foi descrito um experimento, utilizandose material granular denso, similar ao realizado na UFV. Nesse experimento, esferas de vidro foram
colocadas entre placas de uma célula de Helle-Shaw, similar à utilizada no experimento da UFV. A
célula passava a vibrar a fim de compactar os grãos, tornando-os um meio denso. Então, por um
furo central numa das placas, injetou-se gás a uma determinada pressão para espalhar as esferas de
vidro e observar os padrões formados. Como resultado, obteve-se padrões dendríticos. O cálculo da
64
6.4 Dimensão Fractal e Raio de Giração dos padrões
65
Fig. 6.27: Gráfico ln(N(r)) versus ln(r) para uma rede L=1111x1111 com 10000 discos grandes,
ppg =pgp =pgg =ppp =100%, pg1 =100% e p1 =100%. D=(1,80±0,01)
Fig. 6.28: Gráfico ln(N(r)) versus ln(r) para uma rede L=1111x1111 com 10000 discos grandes.
ppg =pgp =pgg =ppp =100%, pg1 =15% e p1 =100%. D=(1,70±0,01)
65
Simulação Numérica de Padrões Em Meios Granulares Densos
66
ln(N(r))
8
6
4
2
0
0
1
2
3
ln(r)
4
5
6
7
Fig. 6.29: Gráfico ln(N(r)) versus ln(r) para uma rede L=1111x1111 com 10000 discos grandes,
ppg =pgp =pgg =ppp =100%, pg1 =8% e p1 =100%. D=(1,66±0,01)
dimensão fractal forneceu D=1,68±0,02, que mostra que a dimensão está em acordo com os modelos
DLA (Diffusion-limited aggregation), cuja dimensão fractal é D=1,70±0,02. Esse experimento fornece uma dimensão fractal igual a prevista pelo nosso modelo. Nas simulações em larga escala nosso
modelo prevê uma dimensão fractal D=1,70±0,01 para os padrões em forma de dedos (figura 6.28) e
uma dimensão fractal D=1,66±0,01 para os padrões pontiagudos (figura 6.29).
Os gráficos ln(N(r)) versus ln(r) para as redes menores (L=311x311) estão mostrados nas figuras 6.32, 6.33 e 6.34. Elas correspondem aos padrões formados com as probabilidades ppg =60%,
ppg =0,1% e ppg =30%, respectivamente. As outras probabilidades desses três padrões são: pg1 =20%
e pgp =pgg =ppp =p1 =100%. As dimensões fractais obtidas para esses três padrões são todas iguais a
D=1,58±0,02. Essa rede é pequena e foram inseridos poucos discos grandes (900). Esse número foi
mais ou menos o limite dentro do jogo das probabilidades utilizado. Um aumento nesse número de
discos grandes, faz com esses atinjam a fronteira da rede e sejam retirados dela. Esse valor da dimensão fractal, D=1,58±0,02, não está de acordo com os resultados obtidos para redes maiores, apesar
de a rede fornecer padrões similares ao de redes maiores. Por exemplo, para uma rede L=811x811
com 2000 discos, probabilidades ppg =0,01%, pg1 =15% e demais iguais a 100% (padrão similar ao da
figura 6.22), o cálculo da dimensão fractal forneceu D=1,66±0,02, o que está em acordo comos valores obtidos com 10000 e 20000 discos grandes inseridos numa rede L=1111x1111. Provavelmente,
a rede L=311x311 ainda é muito pequena para se fazer simulação dos meios granulares com intuito
de se obter a dimensão fractal.
66
6.4 Dimensão Fractal e Raio de Giração dos padrões
67
10
ln(N(r))
8
6
4
2
0
0
1
2
3
ln(r)
4
5
6
7
Fig. 6.30: Gráfico ln(N(r)) versus ln(r) para uma rede L=1111x1111 com 20000 discos grandes.
ppg =pgp =pgg =ppp =100%, pg1 =20% e p1 =100%. D=(1,79±0,01)
ln(N(r))
8
6
4
2
0
0
1
2
3
ln(r)
4
5
6
7
Fig. 6.31: Gráfico ln(N(r)) versus ln(r) para uma rede L=1111x1111 com 20000 discos grandes,
ppg =pgp =pgg =ppp =100%, pg1 =2% e p1 =100%. D=(1,69±0,01)
67
68
Simulação Numérica de Padrões Em Meios Granulares Densos
Fig. 6.32: Gráfico ln(N(r)) versus ln(r) para uma rede L=311x311 com 900 discos grandes, ppg =60%,
pgp =pgg =ppp =100%, pg1 =20% e p1 =100%.(D=1,58±0,02)
Fig. 6.33: Gráfico ln(N(r)) versus ln(r) para uma rede L=311x311 com 900 discos grandes, ppg =0,1%,
pgp =pgg =ppp =100%, pg1 =20% e p1 =100%.(D=1,58±0,02)
68
6.4 Dimensão Fractal e Raio de Giração dos padrões
69
Fig. 6.34: Gráfico ln(N(r)) versus ln(r) para uma rede L=311x311 com 900 discos grandes, ppg =30%,
pgp =pgg =ppp =100%, pg1 =20% e p1 =100%.(D=1,58±0,02)
6.4.2
Cálculo do Raio de Giração
O Raio de Giração (Rg ) foi definido pela equação 5.2. Fisicamente, o raio de giração (Rg ) representa a distância radial a um eixo que passa pelo centro de massa, na qual a massa de um corpo
poderia ser concentrada, sem alterar a sua inércia rotacional em relação a esse eixo. Ele deve obedecer
a uma lei de potência com o número de partículas N dada por
Rg (N ) ∼ N ν .
(6.1)
Para um objeto fractal, o expoente ν está relacionado com a dimensão fractal D por ν= D1 . Portanto, a inclinação dos gráficos ln(Rg (N)) versus ln(N) também é um meio de se determinar a dimensão fractal D. As figuras 6.35, 6.36 e 6.37 mostram o gráfico ln(Rg (N)) versus ln(N) para a rede
L=1111x1111 e 10000 discos grandes injetados. As probabilidades são as mesmas utilizadas para gerar as figuras 6.27, 6.28, e 6.29. Os resultados de ν são respectivamente, ν=0,45±0,01, ν=0,40±0,01
e ν=0,48±0,01, para o raio de giração calculado em relação ao centro de massa. As dimensões
fractais obtidas desses valores de ν são, respectivamente, iguais a D=2,22±0,05, D=2,50±0,07 e
D=2,08±0,05.
As figuras 6.38 e 6.39 são os gráficos para a mesma rede L=1111x1111 e a injeção de 20000
discos grandes. As probabilidades são as mesmas referentes as figuras 6.30 e 6.31. Os expoentes ν
são respectivamente, ν=0,41±0,01 e ν=0,61±0,01, quando o raio de giração é calculado em relação
69
70
Simulação Numérica de Padrões Em Meios Granulares Densos
Fig. 6.35: Gráfico ln(Rg (N)) versus ln(N) para uma rede L=1111x1111 com 10000 discos grandes,
ppg =pgp =pgg =ppp =100%, pg1 =100% e p1 =100%. ν=0,45±0,01
ao centro de massa. As corespondentes dimensões fractais são D=2,44±0,06 e D=1,64±0,03.
Como podemos observar, as dimensões fractais relativas aos padrões mostrados não coincidem
com as calculadas utilizando o método de “contar caixinhas”. Entretanto, estes valores apesar de
estarem relativamente mais próximos dos valores obtidos experimentalmente pelo grupo de sistemas
complexos da UFV, são superiores à dimensão em que os padrões estão imersos (d=2), o que é uma incoerência. Isso leva-nos a concluir que nesse caso o método de calcular a dimensão fractal utilizando
o raio de giração não é o método mais adequado.
70
6.4 Dimensão Fractal e Raio de Giração dos padrões
71
Fig. 6.36: Gráfico ln(Rg (N)) versus ln(N) para uma rede L=1111x1111 com 10000 discos grandes.
ppg =pgp =pgg =ppp =100%, pg1 =15% e p1 =100%. ν=0,40±0,01
Fig. 6.37: Gráfico ln(Rg (N)) versus ln(N) para uma rede L=1111x1111 com 10000 discos grandes,
ppg =pgp =pgg =ppp =100%, pg1 =8% e p1 =100%. ν=0,48±0,01
71
72
Simulação Numérica de Padrões Em Meios Granulares Densos
Fig. 6.38: Gráfico ln(Rg (N)) versus ln(N) para uma rede L=1111x1111 com 20000 discos grandes.
ppg =pgp =pgg =ppp =100%, pg1 =20% e p1 =100%. ν=0,41±0,01
6
ln(Rg)
5,5
5
4,5
4
6
7
8
ln(N)
9
10
Fig. 6.39: Gráfico ln(Rg (N)) versus ln(N) para uma rede L=1111x1111 com 20000 discos grandes,
ppg =pgp =pgg =ppp =100%, pg1 =2% e p1 =100%. ν=0,61±0,01
72
Capítulo 7
Conclusão
O experimento realizado no Departamento de Física da Universidade Federal de Viçosa - UFV
mostrou padrões não antes observados nos meios granulares densos. A principal pergunta era: qual o
mecanismo físico responsável pela formação desses padrões? Nossa proposta foi apresentar um modelo simples de automato celular de gás de rede (PLGA) para tentar explicar a formação dos padrões.
O modelo consiste de uma rede triangular regular, onde podem ser dispostos discos de dois tamanhos
diferentes. Inicialmente, é criado um substrato formado por discos de um determinado tamanho. Posteriormente, pelo sítio central da rede, discos de outro tamanho são inseridos e obedecendo a certas
regras probabilísticas de movimento, empurram os discos já localizados sobre a rede. As regras de
movimento relacionam-se a propriedades mecânicas: atrito entre as partículas e entre elas e as placas. Também estão relacionadas à conservação de energia nas colisões, bem como à conservação da
componente do momento linear na direção das colisões. O movimento de um disco só pára quando
ele encontra um sítio vazio para se localizar, ou quando ele atinge a borda da rede e é retirado dela.
Foram analisados dois casos. O primeiro é aquele em que discos maiores formam um substrato
na rede e discos menores são inseridos pelo sítio central. Para esse caso, os padrões observados são
similares aos obtidos no experimento realizado na UFV. A mudança de um tipo de padrão circular
para outro com crescimento de pontas, formando padrões tipo estrelas, é dominada pela probabilidade pp1 de o disco pequeno deslocar-se para frente, relacionada à conservação da componente do
momento linear na direção do movimento durante a colisão. Existe uma “transição de fase” nos padrões, ocasionada pela variação dessa probabilidade. Quando pp1 é igual a 100%, ou seja pp1 =1, o
padrão formado é sempre no formato de uma estrela, regular ou não. No caso de a probabilidade do
disco pequeno deslocar-se para frente ser menor que 100%, sempre teremos padrões circulares. Não
importam as probabilidades de o disco pequeno ocupar um sítio vazio e nem as probabilidades de
o disco pequeno empurrar um disco grande, desde que essa última seja diferente de zero. Sempre
teremos padrões circulares morfologicamente semelhantes. Isso está de acordo com o experimento
feito pelos pesquisadores da UFV. Quando grãos de diâmetro menor que o diâmetro dos grãos que
compõem a monocamada inicial são inseridos, sempre os padrões formados são circulares.
Este fato, pelo que pudemos perceber, parece estar relacionado com a perda de energia dos grãos
73
Conclusão
74
pequenos ao colidirem com os grãos grandes, que compõem a monocamada inicial. Esses grãos
maiores, ao se amontoarem, formam um aglomerado denso. Portanto, sua massa inercial aumenta.
Assim, com a perda de energia durante as colisões, os grãos menores tendem a se acomodarem
simetricamente em torno do furo central. Dessa maneira, eles formam um aglomerado compacto com
grande massa inercial e como um todo, vão movendo os grãos maiores.
No segundo caso, discos grandes são inseridos pelo sítio central da rede. A rede está preenchida por uma monocamada formada por discos pequenos. Também nesse caso, foram obtidos os
padrões experimentais, que vão de circulares a dedos pontiagudos, dependendo das probabilidades
utilizadas nas regras do movimento. Reproduzimos qualitativamente o diagrama morfológico obtido
experimentalmente. A probabilidade que mostrou maior relevância na formaçao dos padrões é a probabilidade pg1 de um disco grande mover-se sempre na direção em que foi empurrado. Também a
probabilidade ppg de um disco pequeno empurrar um disco grande mostrou contribuir na formação
dos padrões.
A probabilidade pg1 de o disco grande seguir no sentido em que foi empurrado está relacionada
com a componente do momento linear que é transferido ao disco grande, quando esse sofre uma colisão. Diminuir essa probabilidade significa fazer com que o disco grande redirecione seu movimento
para o mesmo sentido do disco que provocou a colisão. É como se ele, após a colisão, tivesse sido
comprimido contra um aglomerado com uma massa inercial efetiva muito grande. Assim, teria a
direção do movimento alterada drasticamente. O fato do sentido do disco que sofreu a colisão tender
a ser a mesma do disco que provocou a colisão, faz com os discos se movam paralelamente. Isso
aumenta as chances de colisões frontais e também a transferência de força de tensão aos discos à
frente, propiciando assim, a formação das pontas ou “dedos”.
Observamos que nas regiões de formação dos dedos, os discos grandes estão dispostos mais
ordenadamente, formando o processo de cristalização observado experimentalmente, ao passo que
nas regiões entre dois dedos adjacentes, os discos grandes se apresentam numa disposição mais desordenada. Essa cristalização dos discos grandes se dá na direção dos eixos da rede triangular, de
modo a formar aglomerados mais compactos nas regiões de formação dos dedos. Esses aglomerados
mostram-se resistentes e parecem não se desfazerem ao longo do tempo. Isso ajuda a propagaçao das
forças numa direção privilegiada, ao longo dos discos, até atingir o disco mais externo, ajudando na
formação dos dedos. Nas regiões mais desordenadas, não existe propagração de forças numa direção
privilegiada. Também, não há formação de dedos.
Como a rede é inicialmente povoada com discos pequenos, eles estão, a princípio, sempre à frente
dos discos grandes. Quando um disco pequeno se move, ele tem possibilidade de empurrar três
discos pequenos à sua frente: um frontal e os outros dois lateralmente, um a cada lado do disco
frontal. A tendência dos discos laterais é provocar um movimento de semi-círculo para trás, um
de cada lado do disco que se movimentou frontalmente. Assim, quando os dedos começam a se
formar, a tendência dos discos pequenos em fluxo retrógrado é de colidirem com os discos grandes
que compõem os dedos dos padrões, provocando, dessa forma, uma turbulência, que tende a destruir
os dedos. Portanto, diminuir a probabilidade ppg de o disco pequeno empurrar um disco grande
contribui, se não para formar, pelo menos para ajudar a manter os dedos. Como a probabilidade
74
75
desse fluxo retrógrado de empurrar um disco grande dos dedos é baixa, isso faz com que os discos
pequenos desse fluxo procurem outra direção de movimento. Nessa nova direção, eles podem ocupar
um espaço vazio da rede ou, até mesmo, colidir com outros discos grandes, que ainda não pertencem
aos dedos. Essa colisão pode empurrar um disco grande para os dedos, ajudando a aumentá-los, ou
mesmo empurrá-los para fazerem parte de um aglomerado, aumentando a cristalização e beneficiando
a formação dos dedos. O aumento da probabilidade ppg beneficia, em parte, a destruição dos dedos.
É o que observamos nas simulações. A instabilidade criada pelo fluxo retrógrado de discos pequenos
parece ser similar a instabilidade de Saffmann-Taylor [95], que ocorre no deslocamento de um fluido
noutro. Uma vez que os dedos começaram a se formar, eles tendem a favorecer seu crescimento.
Também o aspecto fractal dos padrões foi observado. Utilizando o método de “contar caixinhas”,
calculamos as dimensões fractais de vários tipos de padrões. Fazendo simulações em larga escala,
verificamos uma tendência de comportamento entre os padrões e a dimensão fractal dos padrões.
Os padrões circulares possuem dimensão fractal mais elevadas (D=1,79±0,01), enquanto para os
padrões pontiagudos a dimensão fractal é menor (D=1,66±0,01). A dimensão fractal dos padrões
pontiagudos que obtivemos foi verificada experimentalmente, recentemente ([94]). No experimento
utilizado, esferas de vidros eram dispostas entre as placas de uma célula de Hele-Shaw. Por um
furo central numa das placas, injetava-se gás sob pressão. Variando-se a pressão dos gás, obtevese padrões dendríticos. A dimensão fractal obtida (D=1,68±0,02) está de acordo com o valor que
previamos para os padrões pontiagudos.
Utilizamos, também, o cálculo do raio de giração para vários padrões, a fim de obtermos o expoente ν, que pode ser relacionado com a dimensão fractal. Os valores obtidos para a dimensão fractal,
por esse método, não coincidem com os as calculadas utilizando o método de “contar caixinhas”,
exceto para um padrão. Estes valores, apesar de estarem relativamente mais próximos dos valores
obtidos experimentalmente pelo grupo de sistemas complexos da UFV, são superiores à dimensão
em que os padrões estão imersos (d = 2), o que é uma incoerência. Isso leva-nos a suspeitar, que
nesse caso, o método de calcular a dimensão fractal utilizando o raio de giração não é o método mais
adequado.
Dos cálculos dos raios de giração para os padrões mostrado, aquele cuja dimensão fractal coincide
em ambos métodos, é aquele apresentado pela figura 6.39. Porém, uma análise mais atenta da curva
apresentada nessa figura, leva-nos a suspeitar da existência de mais de um regime durante a evolução
do padrão. Cada regime parece apresentar uma inclinação diferente, o que forneceria dimensões
fractais diferentes. Entretanto, cada regime possui um número muito pequeno de pontos simulados.
Dessa forma, o ajuste feito para esse padrão e o valor da dimensão fractal obtido parece não ser um
valor confiável. Para o caso desse padrão, necessitaríamos de uma simulação com maior número de
pontos para obtermos uma dimensão fractal mais confiável.
Assim, apresentamos um modelo que reproduz qualitativamente a morfologia dos padrões observados experimentalmente. O modelo também reproduziu resultados quantitativos, obtidos no experimento original. Nosso modelo foi capaz de fornecer elementos importantes para a explicação dos
fenômenos observados. Mais do que isso, permitiu-nos fazer previsões quantitativas sobre essa morfologia, que foram observadas em experimentos realizados posteriormente. Estudos futuros poderão
75
Conclusão
76
ser dedicados a outros tipos de fenômenos observados em sistemas granulares densos.
76
Referências Bibliográficas
[1] Oliveira, M.J. de and Petri, A., Slow relaxation In a diffusional Model for granular compactation, In: Encontro Nacional de Física da Matéria Condensada 22, São Paulo, Resumos,
Sociedade Brasileira de Física, 1999.
[2] Binder, K. and Herrmann, D. W., Monte Carlo Simulation in Statistical Physics, Berlin, Cardona, Fulde, Klitzing and Queisser - Springer, Heidelberg, 1997.
[3] Oliveira, M.J. de and Petri, A., J. Phys. A 31, L425.
[4] Herrmann, H. J. and Luding, S., Modeling Granular Media on the computer In: Continuum
Mechanics and thermodynamics, Berlin, Springer, Heidelberg, 1998.
[5] Herrmann, H. J., Computer Simulation of Granular Media, Amsterdam, Bideau, D. and Hansen - Elsevier Science Publisher B. V., A., 1993.
[6] Bunde, A. and Havlin, S., Fractals and Disordered Systems, New York, Springer, 1995.
[7] Herrmann, H. J., Physica A 51, 263, 1999. Jones and Bartlet publishers, 1999.
[8] Herrmann, H.J.Simulation Granular Media on The Computer, In: 3rd Granada Lectures in
Computational Physics, Berlin, Garrido, P. L. and Marro, J. - Spriner, Heidelberg, 1995.
[9] Brilliantov, N. V. and Pöschel, T., Kinetic Theory of Granular Gases, Oxford, Oxford University, 2004.
[10] Midi, G. D. R., Eur. Phys. J. E 14, 367, 2004.
[11] Claudin, P. and Bouchaud. J. P., Phys. Rev. Lett. 78, 231, 1997.
[12] Kolb, E., Cviklinski, J., Lanuza, P., Claudin, P. and Clément, E., Phys. Rev. E 69, 031306,
2004.
[13] Knight, J.B., Jaeger, H.M. and Nagel, S.R., Phys. Rev. Lett. 70, 3728, 1993.
[14] Jaeger, H.M., and Nagel, S. R., Rev. Mod. Phys. 68, 1259, 1993.
[15] Hill, K. M. and Kakalios, J., Phys. Rev. E 49, 3610, 1994.
77
78
REFERÊNCIAS BIBLIOGRÁFICAS
[16] Ippolito, I., Annic, C., Lemaitre, J., Oger, L. and Bideau, D., Phys. Rev. E 52, 2072,1995.
[17] Warr, S. and Huntley, J. M., Phys. Rev. E 52, 5596, 1995.
[18] Frette, V., Christensen, K. Mathe-Sörenssen,A., Feder, J., Jössang, T. and Meakin, P., Nature
349, 49,1996.
[19] Cizeau, P., Makse, H. A. and Stanley, H. E., Phys. Rev. E 59, 4408, 1999.
[20] Arason, I. S. and Tsimring, L. S., Rev. Mod. Phys. 78, 641, 2006.
[21] Makse,H. A., Havlin, S., King, P. R. and Stanley, H. E., Nature 386, 379, 1997.
[22] Meakin, P., Physica A 163, 733, 1990.
[23] Gallas, J. A. C., Herrmann, H. J. and Sokolowiski, S., J. Mod. Phys. B 7, 1179, 1993.
[24] Gallas, J. A. C., Herrmann, H. J. and Sokolowiski, S., Phys. Rev. lett. 69, 1371, 1992.
[25] Peng, GW. and Herrmann, H.J., Phys. Rev. E 51 1745, 1995.
[26] Gallas, J. A. C., Herrmann, H. J. and Sokolowiski, S., Physica A 189, 437,1992.
[27] Liu, C. H., Nagel, S. R., Schecter, D. A., Coppersmith, S. N., Majumdar, S., Narayan, O. and
Witten, T.A., Science 269, 523, 1995.
[28] Liu, C. H., Nagel, S. R., Phys. Rev. lett. 68, 2301,1992.
[29] Liu, C. H. Phys. Rev. B 50, 782, 1994.
[30] Onoda, G. Y. and Liniger, E. G., Phys. Rev. lett. 64, 2727,1990.
[31] Mehta, A. and Edwards, S. F., Physica A 157, 1091,1989.
[32] Pouliquen, O. and Gutfrain, R., Phys. Rev. E 53, 552, 1996.
[33] Backer, G. C. and Metha, A., Phys. Rev. E, 4, 184,1993.
[34] Knight, J.B., Fandrich, C. G., Jaeger, H. M. and Nagel, Phys. Rev. E 51, 3957,1995.
[35] Alexander, F. J. and Lebowitz, J. L., J. Phys. A 23, L375, 1990.
[36] Silva, A. C., and Bernardes, A. T., Relatório de Iniciação Científica, Ouro Preto, Universidade
Federal de Ouro Preto - UFOP, 2000.
[37] Evesque, P. and Rajchenbach, J., Phys. Rev. lett. 62, 44, 1989.
[38] Pak, H. K. and Behinger, R. P., Nature 371, 231, 1994.
78
REFERÊNCIAS BIBLIOGRÁFICAS
79
[39] Lee, J., Phys. Rev. E 49, 281, 1994.
[40] Pak, H. K. and Behinger, R. P., Phys. Rev. Lett. 71, 1832,1993.
[41] Borurzuschky, M. and Miller, J., Phys. Rev. Lett. 74, 2216, 1995.
[42] Aoki, K. M., Akiyama, T., Maki, Y. and Watanabe, T., Phys. Rev. E 54, 874,1996.
[43] Pschel, T. and Herrmann, H. J., Europhys.Lett. 29, 123, 1995.
[44] Ehrichs, E. E., Jager, H. M., Karczmar, G. S., Knight, J. B., Kuperman, V. Yu. and Nagel, S.
R., Science 267, 1632, 1995.
[45] Pak, H. K., Van Doorn, E. and Behinger, R. P., Phys. Rev. Lett. 74, 4643, 1995.
[46] Melo, F., Umbanhower, P. and Swinney, H. L., Phys. Rev. Lett. 72, 172, 1993.
[47] Brennen, C.E., Ghosh, S. and Wassgren, C. R., J.Appl. Mech. 63, 156,1996.
[48] Metcalf, T. H., Knight, J.B. and Jaeger, H. M., Physica A 236, 202, 1997.
[49] Melo, F., Umbanhower, P. and Swinney, H. L., Phys. Rev. Lett. 75, 3838, 1995.
[50] Douady, S., Fauve, S. and Laroche, C. Europhys.Lett. 8, 621, 1989.
[51] Jaeger, H. M., Liu, C.H., Nagel, S. R. and Witten, T. A., Europhys.Lett. 11, 619, 1990.
[52] Herrmann, H. J., Physica A 191, 263, 1992.
[53] Walton, O. R., Particulate Two-phase Flow, Part I, Boston, C. Roco-Butterworth-Heinemann,
1992.
[54] Oerster, S. F., Louge, M., Chang, H. and Allia, K., Phys. Fluids 6, 1108, 1994.
[55] Brilliantov, N. V., Spahn, F., Hertzsch, J. M. and Pöschel, T., Phys. Rev. E 53, 5382, 1996.
[56] Hertzsch, J. M., Spahn, F. and Brilliantov, N. V., Phys. Rev. Lett. 78, 1596, 1997.
[57] Luck, J. M. and Mehta, A., Phys. Rev. E 43, 3988, 1993.
[58] Radjai, F. and Roux, S., Phys. Rev. E 51, 6177, 1995.
[59] Goldhirsch, I. and Zanetti, G., Phys. Rev. Lett. 70, 1619,1993.
[60] McNamara, S. and Young, W. R. , Phys. Rev. E 50, 28, 1994.
[61] Kadanoff, L. P., Rev. Mod. Phys. 71, 453, 1999.
[62] Zhou, T. and Kadanoff, L. P, Phys. Rev. E 54, 623, 1996.
79
80
REFERÊNCIAS BIBLIOGRÁFICAS
[63] McNamara, S., Garcia-Rojo, R. and Herrmann, H. J., Phys. Rev. E 72,021304, 2005.
[64] Unger, T., Kertéz, J. and Wolf, D. E. Phys. Rev. Lett. 94, 178001, 2005.
[65] Mandelbrot, B. Objectos Fractais - Forma, Acaso e Dimensão, Lisboa, Gradiva Publicações
Ltda., 1991.
[66] Sharon, E., Moore, M. G., McCormick, W. D. and Swinney, H. L., Phys. Rev. Lett. 91, 2055041, 2003.
[67] Hastings, H. M. and Sugihara, G., Fractals - A User’s guide For The Natural Sciences, Oxford,
Oxford Sciene Publications, 1998.
[68] Vicsek, T., Fractal growth Phenomena, Singapore, World Scientific, 1989
[69] Scheinerman, E. R., Invitation to Dynamical Systems, New York, Prentice Hall, 1996.
[70] Castro e Silva, A. V. C., Dissertação de Mestrado, Belo Horizonte, UFMG, 1995.
[71] von Neumann, J., The General and Logical Theory of Automata, Collected Works, New York,
A. H. Taub, 5, 288, 1963.
[72] Penrose, R., A Nova Mente do Rei - Computadores, Mentes e as Leis da Física, Rio de Janeiro,
Campus, 1991.
[73] Wolfram, S., Rev Mod. phys. 55, 601, 1983.
[74] Herrmann, H. J., Nonlinear Phenomena in complex systems, New York, A. N. Proto - Elsevier
Science Publissher B. V., 1989.
[75] Wolfram, S., Theory and Applications of Cellular Automata, Singapore, World Scientific,
1986.
[76] Rujan, P., J. Stat. Phys. 49, 139, 1987.
[77] Georges, A. and Le Doussal, P., J. Stat. Phys. 54,1011, 1989.
[78] Domany, E. and Kinzel, W., Phys. Rev. Lett. 53, 447, 1985.
[79] Martins, M. L., Verona de Resende, H. F., Tsallis, C. and Magalhães, A. C. N, Phys. Rev. Lett.
66, 2045, 1991.
[80] Verona de Resende, H. F., Martins, M. L., Magalhães, A. C. N. and Tsallis, C., Nonlinear Phenomena in Fluids, Solids and Complex Systems, Amsterdam, P. Cordero and B. Nachtergaele Elsevier Science Publisher B. V., 1991.
[81] Frisch, U., Hasslacher, B. and Pomeau, Y., Phys. Rev. Lett. 56, 1505, 1986.
80
REFERÊNCIAS BIBLIOGRÁFICAS
81
[82] Peng, GW. and Herrmann, H. J., Physica A 199, 476, 1993.
[83] Peng, GW.,Physica A 201, 573, 1993.
[84] Peng, GW. and Herrmann, H. J., Phys. Rev. E 49, R1796, 1993.
[85] Peng, GW. and Ohta, T., Phys. Rev. E 55, 6811, 1997
[86] Kadanoff, L. P., McNamara, G. R. and Zanetti, G., Phys. Rev. E 40, 4527, 1989.
[87] Balasubramanian, D. H. and Zaleski, S., Phys. Rev. E 36, 2248, 1987.
[88] Rothman, K., Hayot, F. and Saam, W. F., Rev. Mod. Phys. 66, 1417, 1994.
[89] Alonso, J. J. and Herrmann, H. J., Phys. Rev. Lett. 76, 4911, 1996.
[90] Vollmar, S. and Herrmann, H. J., Physica A 215, 411, 1995.
[91] Pinto, S. F., Couto, M.S., Atman, A. P. F., Alves, S. G., Bernardes, A. T., Resende, H. F. V. and
Souza, E. C., Phys. Rev. Lett. 99, 1 ,2007.
[92] Caglioti, E.; Loreto, V.; Herrmann, H. J. and Nicodemi, M., Phys. Rev. Lett. 79, 1575, 1997.
[93] Pinto, S. F., Dissertação de Mestrado em Física, Universidade Federal de Viçosa, Centro de
Ciências Exatas, Departamento de Física, 2006.
[94] Cheng, X., Xu, L. Patterson, A. Jaeger, H. M. and Nagel, S. R., Nature Physics 4, 234, 2008.
[95] Meakin, P., Fractal, Scaling and Growth far from Equilibrium, Cambridge, Cambridge University Press, 1988.
81
82
REFERÊNCIAS BIBLIOGRÁFICAS
82
Apêndice A
Apêndice A: Programa para gerar os padrões. Linguagem
FORTRAN 90.
83
84
Apêndice A: Programa para gerar os padrões. Linguagem FORTRAN 90.
84
85
85
86
Apêndice A: Programa para gerar os padrões. Linguagem FORTRAN 90.
86
87
87
88
Apêndice A: Programa para gerar os padrões. Linguagem FORTRAN 90.
88
89
89
90
Apêndice A: Programa para gerar os padrões. Linguagem FORTRAN 90.
90
91
91
92
Apêndice A: Programa para gerar os padrões. Linguagem FORTRAN 90.
92
93
93
94
Apêndice A: Programa para gerar os padrões. Linguagem FORTRAN 90.
94
95
95
96
Apêndice A: Programa para gerar os padrões. Linguagem FORTRAN 90.
96
97
97
98
Apêndice A: Programa para gerar os padrões. Linguagem FORTRAN 90.
98
99
99
100 Apêndice A: Programa para gerar os padrões. Linguagem FORTRAN 90.
100
101
101
102 Apêndice A: Programa para gerar os padrões. Linguagem FORTRAN 90.
102
103
103
104 Apêndice A: Programa para gerar os padrões. Linguagem FORTRAN 90.
104
Apêndice B
Artigo Publicado
• Granular Fingeres on Jammed Systems: New Fluidlike Patterns
Arising in Grain-Grain Invasion Experiments.
Physical Review Letters 99, 068001, 2007.
105
Apêndice B: Artigo Publicado
106
106
107
107
Apêndice B: Artigo Publicado
108
108
109
109


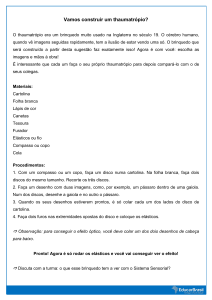
![Placa politica [Modo de Compatibilidade]](http://s1.studylibpt.com/store/data/001387353_1-84a06ffbaac79996f12efc78806a6b1e-300x300.png)