Universidade do Vale do Paraíba
Faculdade de Engenharias Urbanismo e Arquitetura
Curso de Engenharia Elétrica/Eletrônica
GIGA DE TESTES PARA RIB
Teste dos circuitos DCDC e RS485
FÁBIO UMEHARA
MARCOS PAULO A. VILLAS-BÔAS
Relatório do Trabalho de Conclusão de Curso
apresentado à Banca Avaliadora da Faculdade de
Engenharias Urbanismo e Arquitetura da
Universidade do Vale do Paraíba, como parte dos
requisitos para obtenção do Título de Bacharel em
Engenharia Elétrica/Eletrônica.
São José dos Campos – SP
Novembro 2014
GIGA DE TESTES PARA RIB
FÁBIO UMEHARA
MARCOS PAULO A. VILLAS-BÔAS
Banca Avaliadora
Presidente Alderico Rodrigues de Paula Junior
Orientador Alessandro Corrêa Mendes
Membro A
Membro B
______________________________________
Alessandro Corrêa Mendes
Orientador Acadêmico
______________________________________
José Ricardo Abalde Guedes
Coordenador da Disciplina de TCC
Data:
Agradecimentos
Agradecemos primeiramente
a Deus, Criador de todas as coisas.
Agradecimento especial às nossas
famílias que diretamente contribuíram
para a realização deste trabalho, aos
colegas, aos professores e os
colaboradores que sempre estiveram
prontos a nos ajudar.
A todos, nosso “muito obrigado”.
Resumo
Foi desenvolvido um projeto de uma estação de teste para uma placa específica
da empresa Ericsson Telecomunicações S.A. de São José dos Campos, tendo o nome
técnico RIB (Placa de Interface de Rádio, do inglês “Radio Interface Board”). A RIB é
uma placa interna de uma RRU (Unidade de Rádio Remoto, do inglês “Remote Radio
Unit”) e tem como função realizar a interface de sinais analógicos e digitais entre a RRU
e a BTS (Estação Base de Transmissão, do inglês “Base Transceiver Station”). A placa
possui como principais conexões a Ethernet, transceptores ópticos, sinais de alarmes
externo e conectores usados somente em instalações e manutenções da RRU, assim,
através do microcontrolador da família MSP430 (Texas Instruments) desenvolveu-se uma
estação em que são testados funcionalmente os sinais de comunicações e alarmes
externos, e tendo como principais objetivos, abranger todos os tipos de simulações
possíveis semelhantes ao seu funcionamento em campo e ao mesmo tempo minimizar o
custo do projeto com soluções simples, porém eficaz. Neste projeto serão abordados os
testes nos circuitos DCDC e RS485 da RIB.
Palavras-chave: Microcontrolador; MSP430; Ethernet; RS232; Fibra-óptica.
Abstract
Develops a design of a test station for a specific board of the company Ericsson
Telecommunications SA of São José dos Campos, the technical name is RIB (Radio
Interface Board). The RIB is an internal board of RRU (Remote Radio Unit) and has the
function to interface of analogue and digital signals between the RRU and BTS (Base
Transceiver Station). The board has as main connections to Ethernet, optical transceivers,
external alarm signals and connectors used only in installation and maintenance of RRU,
thus by the MSP430 microcontroller family (Texas Instruments) developed a station
where are functionally tested signals communications and external alarms, and having as
main objectives reach all similar functions like field operation while minimizing possible
simulations project cost with simple but effective solutions. In this project will be covered
the test in the circuits DCDC and RS485 of the RIB.
Keywords: Microcontroller; MSP430; Ethernet; RS232; Fiber-optics.
Sumário
BANCA AVALIADORA ............................................................................................... II
AGRADECIMENTOS ................................................................................................ III
RESUMO ....................................................................................................................... IV
ABSTRACT .................................................................................................................... V
ÍNDICE DE FIGURAS .............................................................................................VIII
ÍNDICE DE TABELAS ................................................................................................. X
LISTA DE ABREVIAÇÕES........................................................................................ XI
INTRODUÇÃO ............................................................................................................. 12
1.1 ANTECEDENTES .................................................................................................. 12
1.2 DESCRIÇÃO DO PROBLEMA ........................................................................... 14
1.3 OBJETIVO .............................................................................................................. 15
1.4 RESTRIÇÕES......................................................................................................... 15
1.5 ORGANIZAÇÃO O TRABALHO........................................................................ 15
EMBASAMENTO TEÓRICO .................................................................................... 16
2.1 CONHECIMENTOS BÁSICOS SOBRE A RIB ................................................. 16
2.2 CONCEITOS BÁSICOS ........................................................................................ 17
2.2.1 MSP-EXP430F5529LP ...................................................................................... 17
2.2.2 Efeito Hall .......................................................................................................... 19
2.2.3 COMUNICAÇÃO RS232.................................................................................... 20
2.2.4 Conversores de nível TTL / RS232 .................................................................... 25
2.2.5 COMUNICAÇÃO RS485.................................................................................... 26
2.3 METODOLOGIA ................................................................................................... 27
DESENVOLVIMENTO ............................................................................................... 30
3.1 MATERIAIS ........................................................................................................... 30
3.1.1 Circuito Principal ............................................................................................... 30
3.1.2 Circuito DCDC................................................................................................... 33
3.1.3 Circuito RS485 ................................................................................................... 34
3.2 PROJETO DETALHADO ..................................................................................... 35
3.3 PROGRAMAÇÃO.................................................................................................. 40
3.4 FLUXOGRAMA ..................................................................................................... 41
RESULTADOS ............................................................................................................. 43
4.1 CIRCUITO TESTE DCDC.................................................................................... 43
4.1.1 Teste funcional ................................................................................................... 43
4.1.2 Teste de Confiabilidade...................................................................................... 43
4.2 TESTE RS-485 ........................................................................................................ 44
4.2.1 Teste Funcional .................................................................................................. 44
4.2.2 Teste de confiabilidade ...................................................................................... 44
4.3 PLACAS CONFECCIONADAS ........................................................................... 45
CONCLUSÕES ............................................................................................................. 48
REFERÊNCIAS BIBLIOGRÁFICAS ........................................................................ 49
ANEXO 1 – ESQUEMA ELÉTRICO......................................................................... 50
ANEXO 2 – CÓDIGO “MAIN” .................................................................................. 56
Índice de Figuras
Figura 1 – Exemplo de Instalação de RRUS nas configurações estrela e cascata .......... 14
Figura 2 – Desenho simplificado dos conectores da RIB ............................................... 16
Figura 3 - MSP-EXP430F5529LP LaunchPad ............................................................... 18
Figura 4 - diagrama para o estudo do efeito “hall” ......................................................... 19
Figura 5 - EIA232 em sua aplicação mais comum ......................................................... 22
Figura 6 - Pinagem completa do padrão EIA232 para dispositivo DTE (usualmente um
PC) ........................................................................................................................... 23
Figura 7 - Pinagem completa do padrão EIA232 para dispositivo DCE (usualmente um
modem) .................................................................................................................... 24
Figura 8 - Convenção utilizada para os sinais mais comuns. ......................................... 25
Figura 9 - Estados lógicos da linha A e B de acordo com o dado que o transmissor
deseja enviar ............................................................................................................ 27
Figura 10 – Diagrama esquemático da Giga de Teste da placa RIB .............................. 28
Figura 11 – Bloco Principal ............................................................................................ 36
Figura 12 – Bloco DCDC ............................................................................................... 37
Figura 13 – Pinagem do CI Hall ACS 712 ..................................................................... 38
Figura 14 - Bloco RS485 / Ethernet................................................................................ 38
Figura 15 - PCB Circuito DCDC (TOP) ......................................................................... 45
Figura 16 - PCB Circuito DCDC (BOT) ........................................................................ 45
Figura 17 - PCB Circuito RS485/Ethernet (TOP) .......................................................... 46
Figura 18 - PCB Circuito RS485/Ethernet (BOT) .......................................................... 46
Figura 19 – Circuito Estação RIB parcialmente completo utilizado para testes ............ 47
Índice de Tabelas
Tabela 1 Estudo dos principais defeitos possíveis na RIB ............................................. 35
Tabela 2 – Resultados dos testes no circuito DCDC ...................................................... 43
Tabela 3 – Resultados dos testes no circuito RS-485 ..................................................... 44
Lista de Abreviações
RIB
Radio Interface Board
RRUS
Remote Radio Unity
RBS
Radio Base Station
BTS
Base Transmission Station
HW
Hardware
LED
Light Emitting Diode
NC
Not connected
OVP
Over Voltage Protection
PCB
Printed Circuit Board
RET
Remote Electrical Tilt
SFP
Small Form Pluggable transceiver
XALM
External Alarm
CI
Circuito integrado
AC
Corrente Alternada
DC
Corrente Contínua
Capítulo 1
Introdução
1.1 Antecedentes
A RIB (Placa de Interface de Rádio, do inglês “Radio Interface Board”), produzida
atualmente na empresa Ericsson, é uma placa interna essencial das RRUS (Unidades de
Rádio Remoto, do inglês “Remote Radio Unity”) que são capazes de ampliar o alcance
da RBS (Estação Rádio-Base, o inglês “Radio Base Station”) em dezenas de quilômetros
e, devido a isso, é um componente muito importante e faz parte das tecnologias que
possuem o papel de solucionar a problemática do aumento recente de demanda de banda
larga e tráfego de redes móveis.
O tráfego de dados móveis atualmente já ultrapassou o de voz e continua
crescendo segundo as tendências globais . Em regiões como Oriente Médio, África e
América Latina o tráfego de banda larga móvel tem quase que dobrado a cada ano e a
projeção para os próximos anos indica um crescimento exponencial [2]. A Ericsson prevê
um aumento de dez vezes no tráfego de dados até 2019 em relação aos dados de 2013,
resultado de vários fatores, como o crescimento global em dispositivos sem fio em redes,
o aumento no uso de “smartphones”, e a implantação de redes mais rápidas que os
padrões atuais 2G e 3G em todo o mundo [3].
Os serviços de 4G / LTE e 5G prometem a solução para o aumento da demanda
com a ampliação da largura de banda, o que de fato, é muito importante, no entanto cada
vez mais no meio técnico-científico tem crescido também outra escola de pensamento
que sugere como solução uma melhoria na eficiência das redes e defende o uso de um
modelo híbrido (redes heterogêneas ou “Het Nets”), geralmente composto de várias
tecnologias de acesso de rádio, diferentes arquiteturas, soluções de transmissão e estações
rádio-base com vários níveis de potência de transmissão. As redes heterogêneas fazem o
“offload” da rede e favorecem a cobertura “indoor”, pois funcionam com uma cobertura
de pequenas células (“small cells”) subjacente à cobertura de células macro e com a
integração de tecnologia Wi-Fi [4].
Para que se compreenda melhor o problema da ineficiência da rede convém citar
o exemplo recente quando na abertura da Copa do Mundo, na partida entre Brasil e
Croácia, segundo a SindiTelebrasil, a tecnologia 3G teve picos de tráfego e
congestionamentos momentâneos devido a grande concentração de usuários conectados
12
em um mesmo lugar [5]. E vale ressaltar que na arena de São Paulo, a cobertura “indoor”
contava com 337 antenas interligadas por 12 quilômetros de fibras ópticas e a área externa
do estádio ainda foi reforçada com mais 22 antenas móveis.
Para os sistemas públicos, especialmente ao ar livre e se a rede macro existente é
demasiado escassa para atender a demanda de tráfego e a cobertura adequada, a
implantação de nós de baixa potência ao ar livre é o mais adequado, pois podem oferecer
cobertura a uma vasta área com vários edifícios e abranger vários locais fechados
(“indoor”).
Existem vários tipos de nós de baixa potência, cada um com exigências diferentes
do “backhaul” (infraestrutura de conexão dos pontos de concentração da rede de acesso
com o núcleo de alta capacidade de transmissão da rede, também conhecido como
“backbone”) [6]. Para redes onde o “backhaul” tem características de baixa latência e alta
capacidade, a implantação de RRUS é a abordagem mais praticada.
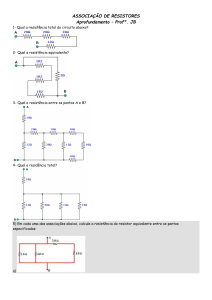
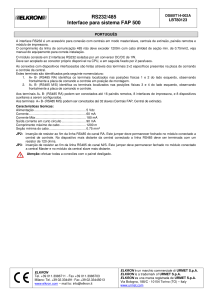
A RRU tem o potencial de melhorar o desempenho geral da rede e é instalada
através de uma configuração estreita entre os nós exemplificada na Figura 1 e que
geralmente compreende antenas para enviar e receber a transmissão de rádio, bem como
uma unidade de processamento de frequência de rádio. Uma unidade central de controle
recebe os sinais de várias RRUS e realiza os processamentos de sinal e de camada
superior. A unidade de controle e as RRUS devem ser conectadas diretamente com uma
baixa latência e interface de alta capacidade, por isso um “backhaul” baseado em fibra
óptica é o mais adequado para a implantação de RRUS.
A RIB tem como principal função realizar a interface de sinais analógicos e
digitais entre a RRU e a BTS (Estação Base de Transmissão, do inglês “Base Transceiver
Station”). A placa possui conectores utilizados na instalação e manutenção da RRU e
trabalha com sinal digital RS485, conexões no padrão Ethernet, transceptores ópticos e
sinal analógico RET VCC.
13
Figura 1 – Exemplo de Instalação de RRUS nas configurações estrela e cascata
1.2 Descrição do problema
Devido à sua complexidade e a importância da RIB na RRU, torna-se
indispensável que haja planos de amostragem e procedimentos para inspeção por
atributos dos lotes de RIBs, ou seja, deve haver um teste simples na linha de produção
segundo o qual a unidade de produto seja classificada como defeituosa ou não em relação
a um dado requisito ou conjunto de requisitos.
Atualmente a inspeção de um lote na linha de produção é feita com a montagem
completa de uma RRU, e em seguida são feitos vários ensaios das principais funções do
equipamento para verificar se a RIB não apresenta defeitos.
Apesar da eficácia deste processo, ele ocasiona minutos de linha parada enquanto
se espera o resultado do teste, e consequentemente, diminui a produtividade na linha.
No mercado não foram encontrados equipamentos específicos que atendessem as
necessidades do teste da RIB. Por se tratar de uma placa muito singular, exige-se um
dispositivo fabricado segundo as necessidades do processo que seja simples, prático e de
baixo custo.
14
1.3 Objetivo
Estudar o funcionamento da RIB para projetar uma estação de teste (Giga de
Teste) de baixo custo que simule e teste as funções dos circuitos DCDC e RS485 da RIB.
Melhorar a metodologia de inspeção no processo de fabricação da RIB,
apresentando ao usuário o resultado do teste ao usuário de maneira mais simples.
Obter resultados mais rápidos no processo de inspeção da RIB para liberar os lotes
em menos tempo, reduzindo o tempo de linha parada e consequentemente o custo da
produção da RIB.
1.4 Restrições
Este trabalho irá se dedicar somente ao estudo dos circuitos DCDC e RS485 da
RIB, não se aprofundando nos testes de outros blocos da RIB tais como o Óptico e o de
padrão Ethernet.
Como já foi esclarecido, este projeto tem como finalidade a redução de custo no
processo de fabricação da RIB, portanto a principal restrição para este trabalho é que o
custo da Giga de Teste não seja demasiado elevado, prejudicando assim sua viabilidade
para a empresa.
A placa RIB, suas especificações (“datasheets”), normas de processo, os
documentos e equipamentos envolvidos em seu processo de fabricação e nem mesmo o
protótipo da Giga de Teste não puderam ser retirados da empresa Ericsson por motivo de
sigilo empresarial. No entanto, com autorização das gerências da empresa, os estudos
puderam ser realizados nas dependências da Ericsson e com isto os autores conseguiram
reunir neste trabalho todo o conhecimento adquirido com esta experiência.
1.5 Organização o Trabalho
O capítulo 2 apresenta o embasamento teórico do funcionamento da RIB e da Giga
de Teste e os principais conceitos utilizados na solução do problema. O capítulo 3
apresenta os materiais e a metodologia utilizada no processo de teste dos circuitos DCDC
e RS485 da RIB no projeto da Giga de Teste. O capítulo 4 apresenta os resultados obtidos
e faz uma discussão usando-se dos conhecimentos adquiridos. O último capítulo traz as
conclusões gerais sobre o projeto e apresenta as proposições para novos estudos e futuros
desafios.
15
Capítulo 2
Embasamento Teórico
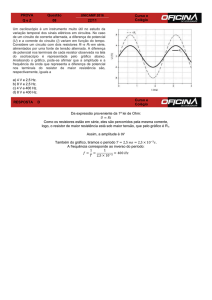
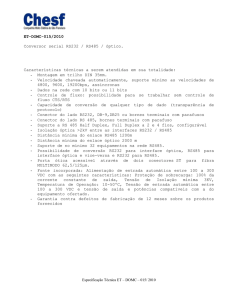
2.1 Conhecimentos básicos sobre a RIB
A RIB (Placa de Interface de Rádio) tem como principal função realizar a
interface de sinais analógicos e digitais na instalação e manutenção da RRU, por isso
trabalha com diferentes tipos de sinais e níveis de tensão simultaneamente e possui vários
conectores, que estão listados a seguir e podem ser vista na Figura 2:
RJ-45 (8 pinos)
RET (6 pinos)
XALM (4 pinos)
Conector de teste (24 pinos)
SFP A (20 pinos)
SFP B (20 pinos)
Conector RIB (80 pinos)
Figura 2 – Desenho simplificado dos conectores da RIB
16
Para facilitar o seu estudo podemos dividir a RIB em quatro circuitos, de acordo
com os sinais e conectores envolvidos: circuito de sinal digital RS485, circuito de
comunicação no padrão Ethernet, circuito de comunicação óptica e circuito de sinal
analógico RET VCC.
O procedimento de inspeção da RIB na linha de produção deve testar cada um
destes quatro circuitos e o requisito para que a amostra e, assim também, o lote sejam
classificados como não defeituosos é que todos os quatro circuitos não apresentem falha,
ou seja, se um ou mais destes circuitos apresentar mau funcionamento, o lote deve ser
classificado como defeituoso e não pode ser liberado para a próxima fase.
Como já foi mencionado na introdução, este trabalho irá se dedicar somente ao
estudo de como serão testados na Giga de Teste os circuitos DCDC e RS485 da RIB. Este
processo envolve como componentes principais dois microcontroladores da família
MSP430 (Texas Instruments), um CI que faz a medição indireta da corrente do circuito
mensurando o efeito “hall” e um módulo conversor de sinal digital RS232 / RS485.
2.2 Conceitos Básicos
2.2.1 MSP-EXP430F5529LP
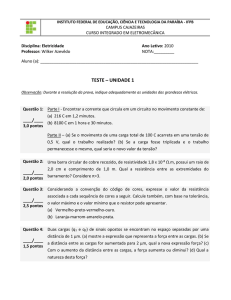
O MSP-EXP430F5529LP LaunchPad conforme a Figura 3, ou simplesmente
“F5529 LaunchPad”, é um kit de desenvolvimento para o microcontrolador USB
MSP430F5529 que oferece emulação “on-board” para programação e “debug” e dispõe
de LEDs para simplificar a interface com o usuário.
O microcontrolador 16-bit MSP430F5529 tem 128KB de memória “flash”, 8KB
RAM e velocidade de processamento de 25MHz, USB integrado e a possibilidade de
trabalhar com diversos periféricos, a critério do usuário. Sua tensão de operação é de 1,8V
a 3,6V.
17
Figura 3 - MSP-EXP430F5529LP LaunchPad
Seus principais recursos são:
cinco “timers”
sistema de “clock” até 25MHz
pode trabalhar com até quatro interfaces de comunicação serial (SPI,
UART, I²C).
conversor analógico-digital (AD) de 12 bits
entradas analógicas e digitais com função de “pull up” e ”pull down”
interno.
A Giga de Teste da RIB utiliza dois kits de microcontroladores
MSP-EXP430F5529LP LaunchPad nos testes dos cicruitos DCDC e RS485, que serão
aqui representados por MSP_A e MSP_B.
18
2.2.2 Efeito Hall
Em 1879, foi publicado um artigo escrito por Hall, que tinha como objetivo
explicar um fenômeno muito interessante que acontecia com circuitos elétricos quando
estes eram submetidos a um campo magnético: a presença de uma diferença de potencial.
Na época, não se conhecia muito sobre a corrente elétrica; sabia-se da existência da
mesma, mas suas características e propriedades, bem como sua constituição, eram apenas
especulações.
O fenômeno descrito, segundo Hall, era mais perceptível se fosse inserido no
circuito elétrico uma chapa metálica, ou um material semicondutor. No experimento
realizado por Hall em 1879, ele utilizou uma placa fina de germânio, ou seja, um material
semicondutor. Conectando-se um voltímetro (instrumento para medir diferença de
potencial) na placa, Hall constatou a existência de uma tensão, denominada tensão “hall”.
Este efeito, a existência de uma tensão no material quando o mesmo é submetido a um
campo magnético, é conhecido como efeito “hall”.
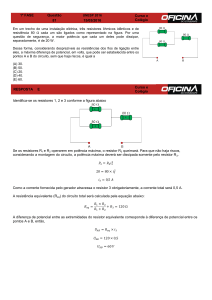
Figura 4 - diagrama para o estudo do efeito “hall”
A Figura 4 representa um diagrama para o estudo do efeito “hall”. O diagrama
ilustra uma bateria (5) que alimenta o elemento ou sensor “hall” (2) com o fluxo de
19
elétrons (1) no sentido real (e não convencional) e dois imãs (3) aplicam um campo
magnético (4) na direção perpendicular ao plano do sensor “hall”. Conforme indicado no
quadro “A” o sensor “hall” recebe uma carga negativa na extremidade superior
(simbolizado pela cor azul) e uma positiva na extremidade inferior (cor vermelha).
Nos quadros “B” e “C”, observa-se que a inversão da corrente elétrica ou do
campo magnético causam a polarização reversa. Invertendo ambas, corrente e campo
magnético no quadro “D”, o elemento “hall” novamente assume a carga negativa na
extremidade superior.
Este efeito foi descoberto em 1879 por Edwin H. Hall durante seu doutorado em
física sob a supervisão de Henry A. Rowland na Universidade Johns Hopkins em
Baltimore, Maryland. Durante seus estudos experimentais sobre a influência do campo
magnético nos portadores de carga da corrente elétrica ele determinou a existência de
portadores de carga negativa muitos anos antes da descoberta dos elétrons por J. J.
Thompson.
O efeito Hall permite a obtenção de dois resultados importantes: o sinal da carga
dos portadores, apartir da medição da diferença de potencial entre as superfícies superior
e inferior, e a densidade de portadores [7].
2.2.3 Comunicação RS232
Quando se trata de transferência de dados, diversas tecnologias ainda utilizam o
sistema de comunicação serial, na qual os bits de dados são enviados sequencialmente
através de um canal de comunicação ou barramento [9]. Existem, no entanto, diversos
parâmetros a se definir, como em qualquer outro tipo de comunicação, tais como níveis
de tensão, codificação do sinal, frequência de transmissão e até mesmo o tipo de conexão
mecânica. Devido a isso normalmente trabalha-se adotando um padrão de interface, que
nada mais é que um grupo de normas para regulamentar um determinado tipo de
comunicação.
No início de 1960, um comitê de padrões, hoje conhecida como a Electronic
Industries Association (EIA), desenvolveu um padrão de interface para transferência
serial de dados entre equipamentos. Naquele tempo, a comunicação de dados
compreendia a troca de dados digitais entre um computador central (mainframe) e
terminais de computador remotos, ou entre dois terminais sem o envolvimento do
computador. Estes dispositivos poderiam ser conectados através de linha telefônica, e
20
consequentemente necessitavam um modem em cada lado para fazer a decodificação dos
sinais [1].
Dessas ideias nasceu o padrão RS232. “RS” é uma abreviação de “Recommended
Standard” (padrão recomendado). As principais normas que o padrão RS232 abrange
envolvem:
Funções de cada circuito no conector da interface
Características elétricas, como taxa de sinalização, níveis de tensão,
comportamento de curto-circuito e carga máxima da capacitância.
Características mecânicas da interface, como tipos de conectores e identificação
dos pinos.
Todavia o padrão RS232 não define elementos como:
Taxas de bit para transmissão, apesar de o padrão ser destinado para taxas de bits
menores que 20.000 bits por segundo.
Codificação de caracteres (por exemplo, ASCII, código Baudot ou EBCDIC)
Enquadramento dos caracteres no fluxo de dados (bits por caractere, bits de início
e parada, paridade)
Protocolos para detecção de erros ou algoritmos para compressão de dados
Fornecimento de energia para dispositivos externos
Ao longo de cinquenta anos desde que este padrão foi desenvolvido, a EIA
publicou três modificações, sendo o mais recente o padrão EIA232F introduzido em 1997.
Apesar dessas revisões, as normas desse padrão sofreram apenas pequenas alterações e a
designação mais utilizada ainda é RS232. Hoje este padrão é muito utilizado pela sua
simplicidade e possibilidade de ser aplicado tanto em equipamentos novos quanto nos
mais antigos.
As maiores dificuldades encontradas pelos usuários na utilização deste padrão de
interface são relativamente pequenas, pois apresentam pequeno risco aos “drivers” e CIs
e incluem pelo menos um dos seguintes fatores:
A ausência ou conexão errada de sinais de controle resultam em estouro do buffer
(“overflow”) ou travamento da comunicação.
21
Função incorreta de comunicação para o cabo em uso resulta em inversão das
linhas de transmissão e recepção, bem como a inversão de uma ou mais linhas de
controle (“handshaking”).
O cabo de comunicação deve limitar-se a aproximadamente dez metros de
comprimento e deve ser isolado de outros cabos de potência, para evitar o
aparecimento de interferências.
Se aplicada em sua totalidade a EIA232 conforme a Figura 5, o equipamento que
faz o processamento dos sinais é chamado DTE (Data Terminal Equipment – usualmente
um computador ou terminal), tem um conector DB25 macho, e utiliza 22 dos 25 pinos
disponíveis para sinais e o terra. O equipamento que faz a conexão (normalmente uma
interface com a linha telefônica) é denominado de DCE (Data Circuit-terminating
Equipment – usualmente um modem), tem um conector DB25 fêmea, e utiliza os mesmos
22 pinos disponíveis para sinais e terra. Um cabo de conexão entre dispositivos DTE e
DCE contém ligações em paralelo, não necessitando mudanças na conexão de pinos.
Figura 5 - EIA232 em sua aplicação mais comum
Se o dispositivo DCE for mesmo um modem diversos sinais são necessários para
a conexão. Normalmente isso não acontece e o DCE não é um modem, ou dois
dispositivos DTE são conectados diretamente e poucos sinais são necessários.
Deve-se notar que nas figuras 6 e 7 existe um segundo canal que inclui um
conjunto de sinais de controle duplicados (“Secundary”). Este canal secundário fornece
sinais de gerenciamento do modem remoto, habilitando a mudança de taxa de transmissão
22
durante a comunicação, efetuando um pedido de retransmissão se erros de paridade forem
detectados, e outras funções de controle.
Figura 6 - Pinagem completa do padrão EIA232 para dispositivo DTE (usualmente um
PC)
Os sinais de temporização de transmissão e recepção são utilizados somente
quando o protocolo de transmissão utilizado for síncrono. Para protocolos assíncronos,
padrão 8 bits, os sinais de temporização externos são desnecessários.
Os nomes dos sinais que implicam em uma direção, como “Transmit Data” e
“Receive Data”, são nomeados do ponto de vista dos dispositivos DTE, conforme a
23
Figura 6. Se a norma EIA232 for seguida a risca, estes sinais terão o mesmo nome e o
mesmo número de pino do lado do DCE, conforme a Figura 7. Entretanto, normalmente
isto não é feito na prática pela maioria dos engenheiros, provavelmente porque em alguns
casos torna-se difícil definir quem é o DTE e quem é o DCE.
Figura 7 - Pinagem completa do padrão EIA232 para dispositivo DCE (usualmente um
modem)
O Pino 7, o pino 1, e a carcaça tem função de “ground” e “shield”. O cabeamento
possui caminhos diferentes para cada um, no entanto internamente muitas vezes conectase o pino 1 e o cabo da carcaça (“shield”) ao sinal de terra no pino 7 [8].
24
Todos os sinais são referenciados a um terra comum que é definido pela tensão no
pino 7 e este pode ou não ser conectado ao terra do dispositivo DCE [8]. Essa é uma das
principais características que fazem o RS232 ser diferente de muitos outros padrões e é
também a razão deste padrão apresentar maior ruído em relação aos outros.
Figura 8 - Convenção utilizada para os sinais mais comuns.
Sinais com tensão entre -3 volts e -25 volts com relação ao terra (pino 7) são
considerados nível lógico “1” , e tensões entre +3 volts e +25 volts são considerados nível
lógico “0”. A faixa de tensões entre -3 volts e +3 volts é considerada uma região de
transição para o qual o estado do sinal é indefinido [8].
Os demais pinos não citados no texto seguem a convenção utilizada conforme a
Figura 8.
2.2.4 Conversores de nível TTL / RS232
A maioria dos equipamentos digitais, inclusive os microcontroladores utilizados
na Giga de Teste, utilizam níveis TTL ou CMOS, portanto, para conectar um equipamento
digital a uma interface RS232 é necessário transformar níveis TTL (0 a 5 volts) em RS232
e vice-versa com o auxílio de conversores de nível.
25
Existe uma variedade grande de equipamentos digitais que utilizam o “driver”
1488 (TTL => RS232) e o “receiver” 1489 (RS232 => TTL). Estes CIs contém quatro
inversores de um mesmo tipo, sejam “drivers” ou “receivers”. O “driver” necessita de
duas fontes de alimentação +7,5 volts a +15 volts e –7,5 volts a –15 volts, o que é um
problema para sistemas que utilizam somente uma fonte de +5 volts.
Em vista disso, outro CI que está sendo amplamente utilizado é o MAX232 (da
Maxim) que inclui um circuito de “charge pump” capaz de gerar tensões de –10 volts e
+10 volts a partir de uma fonte de alimentação simples de +5 volts, bastando para isso
alguns capacitores externos. Este CI também tem 2 “receivers” e 2 “drivers” no mesmo
encapsulamento. Nos casos onde serão implementados somente as linhas de transmissão
e de recepção de dados, não seria necessário 2 chips e fontes de alimentação extras.
2.2.5 Comunicação RS485
A comunicação RS485 surgiu a partir do padrão RS232, mas funciona no que se
pode chamar de “modo diferencial”, ou seja, a diferença entre as tensões na linha resulta
se o mestre está transmitindo “1” ou “0” e não há um sinal terra de referência como em
RS232.
A RS485 suporta a comunicação “half-duplex” e “full-duplex”; para a primeira
há necessidade da utilização de um cabo com um par trançado enquanto no segundo são
necessários dois pares de cabos.
Este tipo de comunicação alcança grandes distâncias de cabo. Podemos chegar
até 1200m de cabo funcionando a 9600 bps. Conforme o “baud-rate” aumenta, o tamanho
do cabo diminui.
Este padrão possibilita o trabalho em rede e utiliza a estrutura mestre-escravo onde
há uma máquina que faz a pergunta e os escravos respondem de acordo com o frame que
chegar se estiver com o mesmo endereço ajustado no escravo.
O cabo de comunicação 485 é composto de dois fios, um destes é chamado de A
e o outro de B. Os estados lógicos da linha A e B variam de acordo com o dado que o
transmissor deseja enviar, conforme a Figura 9.
Quando o transmissor (INPUT D) fica em alto, a linha A fica mais positiva que a
B e o inverso ocorre quando o estado inverte. Note-se também que também há uma linha
de controle chamada DE e quando a mesma fica em nível lógico baixo, o barramento fica
em alta-impedância.
26
Para que o receptor identifique um sinal válido, a diferença entre os terminais A e
B deve ser maior que 200 mV. Entre 200mV e –200mV o sinal é indefinido.
Figura 9 - Estados lógicos da linha A e B de acordo com o dado que o transmissor
deseja enviar
2.3 Metodologia
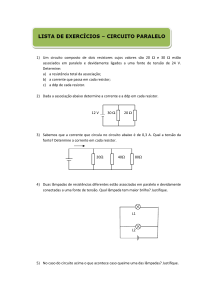
Antes de iniciar o procedimento de inspeção da RIB com a Giga de Teste, o
operador liga a fonte alimentação (5V) para energizar os microcontroladores da estação
e encaixa a RIB que será testada.
27
Figura 10 – Diagrama esquemático da Giga de Teste da placa RIB
A Figura 10 representa o diagrama de blocos da Giga de Teste. Para dar início ao
teste pressiona-se o botão START. O microcontrolador chaveia o circuito do regulador
de tensão LM317 que energiza a RIB com 5V. Se houver curto-circuito o próprio LM317,
que possui proteção de sobrecorrente, abre o circuito instantaneamente. A corrente que
entra na RIB é medida por efeito hall pelo circuito do ACS7/2T. Se a corrente medida
pelo microcontrolador for nula indica que a RIB é defeituosa, o teste é encerrado e o LED
“FAIL” é aceso; e se a corente estiver dentro dos limites normais de operação, é iniciado
o ciclo de testes nos principais circuitos e conectores da RIB.
Logo em seguida inicia-se o teste do circuito RS485 da RIB. O MSP_A enviará
um dado pra o MSP_B através do circuito RS485 da RIB, se o MSP_B receber o dado
corretamente, ele responderá com outro dado novamente através da RIB e o MSP_A
processará este dado para verificar se chegou corretamente. Caso haja alguma divergência
na comunicação entre os microcontroladores, o teste é encerrado e o LED “FAIL” é aceso.
28
Se os dados forem recebidos corretamente, conclui-se que o circuito RS485 não possui
defeitos e passa-se para a próxima etapa de teste.
Ao final do teste, depois de todas as etapas, se em momento algum a amostra não
apresentar defeito, o LED “PASS” é aceso e o usuário pode remover a RIB da Giga de
Teste.
O botão RESET permite que o usuário reinicie um teste a qualquer instante.
29
Capítulo 3
Desenvolvimento
3.1 Materiais
O custo total desse projeto foi de R$230,00; os principais módulos e os kits dos
microcontroladores foram adquiridos no exterior e a compra foi feita via internet. O
custo do fret foi incluído no custo total.
3.1.1 Circuito Principal
Peça
C2
Valor
100nF
Dispositivo
C-EUC0402K
Ecapsulamento
C0402K
C3
100nF
C-EUC0402K
C0402K
C4
100nF
C-EUC0402K
C0402K
C5
100nF
C-EUC0402K
C0402K
DCDC
10PIN
DRIVE
RS
IC2
10 PIN
4052N
4052N
-2510 PAK100/250010
-2510 PAK100/250010
DIL16
IC3
4052N
4052N
DIL16
JP1
ETH_LOOP_
0
ETH_LOOP_
1
UART_MSP
430
CTRL_LED1
CTRL_LED2
JP1E
JP1
Descrição
CAPACITOR,
European symbol
CAPACITOR,
European symbol
CAPACITOR,
European symbol
CAPACITOR,
European symbol
3M (TM) Pak 100
4-Wall Header
3M (TM) Pak 100
4-Wall Header
Dual 4-channel
ANALOG
MULTIPLEXER
Dual 4-channel
ANALOG
MULTIPLEXER
JUMPER
JP1E
JP1
JUMPER
JP2Q
JP2Q
JUMPER
JP1E
JP1E
SSW-102-02-S-D
JP1
JP1
SSW-102-02-SD
SSW-102-02-S-D
SSW-102-02-SD
LEDCHIPLED_08
05
CHIPLED_0805
JUMPER
JUMPER
THROUGH-HOLE
.025" SQ POST
SOCKET
THROUGH-HOLE
.025" SQ POST
SOCKET
LED
JP2
JP3
JP4
JP5
JP8
JP9
LED1
UART_CTR
L1
30
LED2
OPTCO
_A
OPTCO
_B
PAINE
L
R1
UART_CTR
L2
20 PIN
LEDCHIPLED_08 CHIPLED_0805
05
-2520 PAK100/250020
20 PIN
-2520 PAK100/250020
-2510
-2510 PAK100/250010
33 R-US_R0402
R0402
R4
33 R-US_R0402
R0402
R6
2k2
R-US_R0402
R0402
R7
2k2
R-US_R0402
R0402
33 R-US_R0402
R0402
R-US_R0402
R0402
R12
33 R-US_R0402
R0402
R13
33 R-US_R0402
R0402
R14
33 R-US_R0402
R0402
R15
33 R-US_R0402
R0402
R16
33 R-US_R0402
R0402
R17
33 R-US_R0402
R0402
R18
33 R-US_R0402
R0402
R19
33 R-US_R0402
R0402
R20
33 R-US_R0402
R0402
R21
33 R-US_R0402
R0402
R22
33 R-US_R0402
R0402
R8
R11
1k
R37
1K
R-US_R0402
R0402
R39
2K2
R-US_R0402
R0402
R40
1K
R-US_R0402
R0402
R41
2K2
R-US_R0402
R0402
LED
3M (TM) Pak 100
4-Wall Header
3M (TM) Pak 100
4-Wall Header
3M (TM) Pak 100
4-Wall Header
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
RESISTOR,
American symbol
31
R53
1K
R-US_R0402
R54
2K2
R-US_R0402
R55
1K
R-US_R0402
R56
2K2
R-US_R0402
R57
47K
R-US_R0402
R58
470 R-US_R0402
R59
470 R-US_R0402
R60
470 R-US_R0402
R61
470 R-US_R0402
U2
MSP430
U4
MSP430
X200
QSE-040-02
MSPEXP430F5529LP
MSPEXP430F5529LP
QSE-040-02
R0402
RESISTOR,
American symbol
R0402
RESISTOR,
American symbol
R0402
RESISTOR,
American symbol
R0402
RESISTOR,
American symbol
R0402
RESISTOR,
American symbol
R0402
RESISTOR,
American symbol
R0402
RESISTOR,
American symbol
R0402
RESISTOR,
American symbol
R0402
RESISTOR,
American symbol
MSP-EXP430F5529LP
MSP-EXP430F5529LP
QSE-040-02
0,80mm HISPEED SOCKET
QSE Serie
32
3.1.2 Circuito DCDC
Peça
Valor
5V_ON
Dispositivo
LEDCHIPLED_08
05
C-USC0603K
Ecapsulame
nto
CHIPLED_0
805
C0603K
C2
100nF
C3
1uF
C-USC0603K
C0603K
C4
100nF
C-USC0603K
C0603K
C5
100nF
C-USC0603K
C0603K
DCDC
10PIN
2510
IC1
317T
317T
PAK100/250
0-10
TO220H
IC2
317T
317T
TO220H
J4
ON/OFF
R1
12V
DCJ0303
CON_P CON_PWR_2P
WR
240
R-US_R0402
DCJ0303
PWR_CON
R0402
R2
360
R-US_R0402
R0402
R3
390
R-US_R0402
R0402
R4
360
R-US_R0402
R0402
R5
2K2
R-US_R0402
R0402
R6
360
R-US_R0402
R0402
R7
1.8k
R-US_R0402
R0402
R8
240
R-US_R0402
R0402
R9
1k
R-US_R0402
R0402
R10
1.8k
R-US_R0402
R0402
LEDCHIPLED_08
05
BC817-16-NPNSOT23-BEC
MODULE_ACS71
2
CHIPLED_0
805
SOT23-BEC
RIB_VC
C_ON
T1
U1
BC817
ACS71
2T
Descrição
LED
CAPACITOR,
American symbol
CAPACITOR,
American symbol
CAPACITOR,
American symbol
CAPACITOR,
American symbol
3M (TM) Pak 100 4Wall Header
Positive VOLTAGE
REGULATOR
Positive VOLTAGE
REGULATOR
DC POWER JACK
RESISTOR, American
symbol
RESISTOR, American
symbol
RESISTOR, American
symbol
RESISTOR, American
symbol
RESISTOR, American
symbol
RESISTOR, American
symbol
RESISTOR, American
symbol
RESISTOR, American
symbol
RESISTOR, American
symbol
RESISTOR, American
symbol
LED
NPN Transistror
MODULE_A
CS712
33
3.1.3 Circuito RS485
Peça
C1
Valor
100nF
Dispositivo
CEUC0402K
CEUC0402K
CEUC0603K
CEUC0603K
CEUC0402K
-2510
Ecapsulamento
C0402K
C2
100nF
C3
1uF
C4
1uF
C5
100nF
DRIVERS
10 PIN
IC5
MAX3232C MAX3232CS SO16
SE
E
MODULE
RS485
OPT1
DB9
F09HP
F09HP
FODM121
SFH6186-2
SMD4
OPT2
FODM121
SFH6186-2
SMD4
C0402K
C0603K
C0603K
C0402K
PAK100/250010
R1
220 R-US_R0402
R0402
R2
220 R-US_R0402
R0402
RET_CABLE
RS232
RS232_RX/TX
RS485
UART_RX/TX
XALARM_CAB
LE
DB9
CON1
F15
F09HP
53047-03
JP2Q
JP2Q
JP2Q
F15HDH
F09HP
53047-03
JP2Q
JP2Q
JP2Q
HDF15H
Descrição
CAPACITOR,
European symbol
CAPACITOR,
European symbol
CAPACITOR,
European symbol
CAPACITOR,
European symbol
CAPACITOR,
European symbol
3M (TM) Pak
100 4-Wall
Header
True RS-232
Transceivers
3.0V to 5.5V,
Low-Power
SUB-D
Optocoupler,
Phototransistor
Output, Low
Input Current
Optocoupler,
Phototransistor
Output, Low
Input Current
RESISTOR,
American symbol
RESISTOR,
American symbol
SUB-D
CONNECTOR
JUMPER
JUMPER
JUMPER
SUB-D
34
3.2 Projeto Detalhado
Para que se elabore a metodologia de um processo de inspeção deve-se conhecer
antes de qualquer coisa, os padrões de qualidade do produto a ser testado. Para isso
estudou-se os parâmetros de uma placa não defeituosa – comumente chamada na empresa
de placa “Master” – para que sirvam de referência.
Outro ponto importante quando se projeta uma estação de teste é conhecer os
principais defeitos que podem resultar em um produto não conforme. Isto é importante
principalmente para que se tenham critérios de funcionamento da estação, ou seja, a Giga
de Teste deve ser capaz de “perceber” cada um dos defeitos, ainda que não seja capaz de
isolá-los, mas precisa garantir que a amostra, quando aprovada no teste, de fato não possui
nenhum defeito.
Tabela 1 Estudo dos principais defeitos possíveis na RIB
Causa
Componentes
com orientação /
polaridade
invertida
Efeito
Sintoma
Teste
O componente com orientação / polaridade invertida
irá se danificar e há pequena
possibilidade de danificar
outros componentes ligados
diretamente a ele.
Perda de sinal.
O bloco do circuito
onde o componente
estiver não funcionará corretamente. O
sinal “morre” nele.
Medição dos sinais de
entrada e saída do
componente, em seguida
verificação visual da
serigrafia do componente.
Sinais ligados aos
terminais do componente faltando apresentarão variação nos
níveis de tensão ou
serão nulos.
O bloco do circuito
onde o componente
estiver não funcionará corretamente e
pode haver curtocircuito.
Apenas realizar inspeção
visual.
Aparecimento
de
ruídos no circuito
envolvido.
Identificar a região do
circuito que apresenta
falha através do multímetro e em seguida com
auxilio
de
um
microscópico realizar uma
inspeção
visual
até
identificar o problema na
solda.
Comparar os sinais de
entrada e saída do
componente e comparar os
valores com valores de
uma placa de referência
(placa Master).
Componentes
Faltando
Ponte de Solda
(“Solde bridge”)
Outros
problemas
relacionados à
solda (Solda fria,
insuficiência, etc)
Falha funcional
do componente
Em terminais de sinais
digitais, poderá danificar o
próprio componente com a
ponte de solda e em caso de
ponte de solda entre VCC e
GND a placa entrará em
curto-circuito, danificando
o circuito da fonte.
O circuito pode apresentar
“mau-contato” e intermitência.
O circuito relacionado ao
componente
defeituoso
apresentará mau funcionamento ou não funcionará.
Sinais de entrada no
componente estarão
funcionando perfeitamente, porém não
haverá sinal de saída.
Identificar o circuito com
falha com um ohmímetro e
realizar a inspeção visual
com um microscópio.
35
Nesse sentido, estudaram-se as causas e efeitos dos diversos defeitos em lotes não
liberados na empresa Ericsson pôde-se listar em síntese todos os defeitos possíveis na
RIB. Para que seja possível detectar certo defeito deve-se conhecer não somente as causas
e efeitos, mas também seus sintomas, ou seja, os principais indícios de que este defeito
está presente. Analisando vários casos de lotes defeituosos, pôde-se elencar os principais
sintomas de defeitos e então ficou mais fácil de estabelecer quais os tipos de testes que a
Giga de Teste deveria ser capaz de realizar para garantir a qualidade da RIB. Todas essas
informações foram sintetizadas na Tabela 1.
Excetuando-se a verificação de componentes com o microscópio e a inspeção
visual, os testes que a Giga de Teste deve realizar são simples: medição de corrente, teste
de continuidade e queda de tensão.
Os dois microcontroladores estarão conectados aos quatro circuitos de teste da
Giga, como mostra a Figura 11. O circuito RS 485 é representado junto ao de padrão
Ethernet por utilizar o mesmo multiplexador. No entanto, como já foi mencionado, os
objetos de estudo deste trabalho serão somente os testes do circuitos DCDC e RS485.
MSP430_A
UART
MSP430_B
UART
UART
DCDC
RS 485/Ethernet
Óptico
Painel LEDs
Figura 11 – Bloco Principal
Ao ligar a fonte de alimentação, a tensão é regulada em 5V pelo LM 317 para
energizar a Giga de Teste (seus microcontroladores). E ao ser pressionado o botão
START do microcontrolador, ele envia um sinal para um segundo LM317, que fecha o
circuito e alimenta a RIB que será testada, conforme a Figura 12. Os LM317 possuem
proteção contra sobrecorrente que abrem o circuito se a corrente extrapolar um limite,
assegurando que a RIB conectada à Giga de Teste não receba a corrente de curto.
36
Fontes 12-24V
ON/OFF
LM 317
LM 317
5V
5V
MSP
Medição de
corrente
Estação RIB
CI – Hall
ACS 712 T
RIB
Figura 12 – Bloco DCDC
O MSP realiza uma medição da corrente que sai do LM317 e vai para a RIB a fim
de comparar com o valor da placa Master e detectar já nesse processo inicial se há algum
mau funcionamento na amostra e se esse for o caso, encerra o teste e acende o LED
“FAIL”.
A medição de corrente é feita por um circuito contendo o CI Hall ACS 712
mostrado na Figura 13, que oferece soluções para sensores de corrente AC e DC nas mais
diversas aplicações, como controle de motores, fontes de alimentação e proteção contra
sobrecorrente. O dispositivo consiste de um circuito Hall preciso e linear que possui
internamente uma trilha de cobre (dos pinos 1 e 2, para os pinos 3 e 4) com baixa
resistência interna (1.2 mΩ nominal, para que a haja baixa perda de potência). Quando é
aplicado fluxo de corrente através dessa trilha de cobre cria-se um campo magnético que
o transdutor do CI Hall converte numa tensão de nível proporcional.
Os terminais da trilha condutiva são isolados das outras entradas/saídas de sinal
(pinos 5 a 8), o que permite que o ACS712 seja utilizado em aplicações que requerem
37
isolação elétrica sem elevar muito o custo do projeto. A tensão gerada na saída do CI Hall
(VIOUT) é enviada ao pino de entrada analógica do MSP_A P6.5 para ser processado.
Figura 13 – Pinagem do CI Hall ACS 712
MSP430_A
UART
UART_A
Multiplex
4052
UART_B
Placa RIB
Módulo
Ethernet / RS232
Módulo RS
232/485
Placa RIB
MAX 232
Backloop
MSP430_B
UART
Figura 14 - Bloco RS485 / Ethernet
Na sequência, inicia-se o teste do circuito RS485, que foi esquematizado na Figura
14. Devido a grande quantidade de pinos a serem testados, foi utilizado um componente
multiplexador que comuta a conexão de um pino entre vários caminhos, servindo como
uma extensão do microcontrolador. No processo do teste, o MSP_A enviará um dado para
o MSP_B através do multiplexador que estará conectado à RIB, ou seja, o dado irá passar
38
pelo circuito RS485 da RIB até chegar ao segundo microcontrolador. O MSP_B então
envia uma resposta ao MSP_A pelo mesmo canal RS485.
Para que o código ficasse mais leve e simples, adotou-se um módulo conversor
de forma que a RIB trabalhe com RS485 e os microcontroladores, RS232. Depois de os
receberem, os microcontroladores analisarão os dados e, se verificarem sua integridade,
o teste passa para as próximas etapas.
39
3.3 Programação
O programa inicia em um “loop” de Decisão, no qual aguarda o BOTAO_START
ficar em nível alto, que acontece quando o operador deseja iniciar o teste da RIB e aciona
o BOTAO_START;
Após acionado o BOTAO_START, é feito a leitura da corrente consumida pela
RIB através de uma porta analógica (I_SUPERV) do MSP_A, e se a corrente for menor
que 90d ou maior que 120d o teste é finalizado cortando a alimentação da RIB e
acionando o LED_FAIL(vermelho), e caso a corrente estiver entre 90d a 120d o teste
continua para próxima etapa;
Na etapa seguinte é testada a comunicação serial RS-485, na qual o MSP_A
configura o multiplexador para direcionar a saída serial do MSP_A para o módulo
conversor RS-232/RS485, através do “set” em A e B para zero; em seguida o MSP_A
envia o caracter “a” e aguarda uma resposta de um caracter “b” do MSP_B, nessa etapa
o MSP_B fica aguardando um caracter “a” via serial e em seguida envia um caracter “b”.
Ao receber o caracter “b”, o MSP_A finaliza o teste da RIB cortando a alimentação da
RIB e acionando o LED_PASS (verde), caso não recebe o caracter “b”, o teste é finalizado
indicando falha.
40
3.4 Fluxograma
MSP430_A
INÍCIO
MSP430_B
BOTÃO_START =
1
DELAY_MS = 1000
LER I_SUPERV
90 <
I_SUPERV
< 120
CALL FAIL
A = 0; B = 0
UART_A_TX = “a”
41
C=1; C<500; C++
INTERRUPÇÃO UART_B
CALL FAIL
UART_A_RX
== “b”
UART_B_RX
== “a”
CALL FAIL
RIB_ON/OFF = 0
RIB_ON/OFF = 0
LED_PASS = 1
UART_B_TX = “b”
LED_FAIL = 1
FIM
FIM
FIM
42
Capítulo 4
Resultados
4.1 Circuito Teste DCDC
4.1.1 Teste funcional
No planejamento das medições, consideramos uma faixa de corrente aceitável
(110 ±10 mA) para o funcionamento de uma RIB e foi implantado juntamente ao circuito
de teste DCDC, um limitador de corrente, para que não ocorresse nenhum dano a placa
ou a estação de testes. Foram disponibilizadas para a realização deste teste 10 RIBs e
apenas duas falharam. Os testes foram realizados em 5 minutos (em média 30 segundos
para cada placa), tempo melhor do que havíamos previsto.
4.1.2 Teste de Confiabilidade
As mesmas 10 RIBs testadas na estação, passaram pelo teste de bancada (teste
realizado por técnicos que a analisam quando realmente é necessário o reparo dessas
placas) e foram confirmados todos os resultados retornados pela estação. As duas placas
que não passaram no teste da estação, realmente estavam com problemas ocorridos no
processo produtivo, como mostra a Tabela 2.
Tabela 2 – Resultados dos testes no circuito DCDC
Após realizados os testes, todas as RIBs com problema na região de DCDC
Valor Medido em
Bancada (mA)
Resultado do teste
(DCDC)
Resultado Teste
(RIB)
110
110
110
200
110
Pass
Pass
Pass
Failed
Pass
Pass
Pass
Pass
Failed
Pass
50
Failed
Failed
110
Pass
Pass
100
Pass
Failed
110
110
Pass
Pass
Pass
Pass
Observação
Técnica
Curto por solda
Faltando
Componente
Falha em outra região,
DCDC ok
foram reparadas para serem utilizadas no próximo teste.
43
4.2 Teste RS-485
4.2.1 Teste Funcional
Conforme planejado, o teste RS-485 foi realizado enviando um dado via RS-232
convertido à RS485 e injetado a RIB e lido de forma inversa através de outro conector da
própria RIB. Foram utilizadas as mesmas 10 RIBs disponibilizadas para o teste e
nenhuma falhou.
4.2.2 Teste de confiabilidade
Como não é possível realizar este teste em bancada, fizemos o seguinte teste: Não
conectamos totalmente o cabo na RIB, simulando algum problema de solda fria ou até
mesmo falta de solda ou ainda a falta de um componente causando problema na
comunicação ou no recebimento do dado enviado. Como previsto em todos os casos a
estação as reprovou.
Tabela 3 – Resultados dos testes no circuito RS-485
Resultado Teste
RS-485
Pass
Resultado do
teste (RIB)
Pass
Resultado Teste
(RRU)
Pass
Pass
Pass
Failed
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Pass
Observação Técnica
Componente deslocado na PAU (Power
Amplifier Unit)
Para confirmar o teste, levamos as 10 RIBs para serem testadas no nível de rádio
(RRU) e apenas uma RRU foi reprovada. Os técnicos analisaram e RRU reprovada e
constataram um defeito de processo produtivo em outro componente da RRU que não a
RIB, como demonstra a Tabela 3.
44
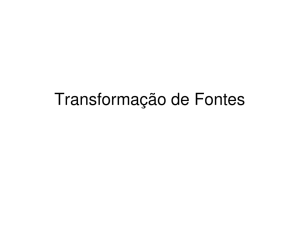
4.3 Placas Confeccionadas
As Figuras 15 e 16 mostram a placa de circuito impresso da parte DCDC da Giga
de Teste, onde possui um sistema de proteção de curto circuito, regulador de tensão
configurado para 5V e um módulo medidor de corrente por efeito “hall”.
Figura 15 - PCB Circuito DCDC (TOP)
Figura 16 - PCB Circuito DCDC (BOT)
As Figuras 17 e 18 mostram a placa de circuito impresso responsável pela
comunicação RS485.
45
Figura 17 - PCB Circuito RS485/Ethernet (TOP)
Figura 18 - PCB Circuito RS485/Ethernet (BOT)
Conforme a Figura 19, todas placas de circuito impresso foram conectadas à placa
de controle onde estão localizados os dois kits MSP430F5520LP.
46
Figura 19 – Circuito Estação RIB parcialmente completo utilizado para testes
47
Capítulo 5
Conclusões
Com este projeto os autores puderam estudar o funcionamento da RIB e trabalhar
no projeto da estação de teste (Giga de Teste), que chegou a ser testada na linha de
produção da empresa Ericsson. O dispositivo fabricado mostrou-se como uma inovação
de baixo custo capaz de simular e testar as funções dos circuitos DCDC e RS485 da RIB.
Com a Giga de Teste melhorou-se a metodologia de inspeção no processo de
fabricação da RIB, e possibilitou-se que o usuário obtivesse o resultado do teste de
maneira simples, rápida e de baixo custo.
Este projeto conseguiu também ampliar a visão dos envolvidos sobre o processo
de inspeção da RIB, deixando oportunidades de melhoria para implementação futura das
quais se destacam:
Estudar o circuito Óptico da RIB e criar uma metodologia para testá-lo na
Giga de Teste;
Estudar o circuito com padrão Ethernet e aprimorar este dispositivo para
testá-lo também;
Criar uma interface no computador ou tela de LCD para melhorar a
apresentação dos resultados.
48
Referências Bibliográficas
[1] - C. E. STRANGIO. The RS232 STANDARD, A Tutorial with Signal Names and
Definitions. CAMI Research Inc., Acton, Massachusetts (1993-2012) Disponível em:
http://www.camiresearch.com/Data_Com_Basics/RS232_standard.html Acesso em: 27
jul. 2014.
[2] - CISCO. Cisco Visual Networking Index: Global Mobile Data Traffic Forecast
Update, 2013–2018 Disponível em:
http://www.cisco.com/c/en/us/solutions/collateral/service-provider/visual-networkingindex-vni/white_paper_c11-520862.html Acesso em: 27 set. 2014.
[3] - CNET. Ericsson predicts tenfold increase in mobile data traffic in five years.
Disponível em: http://www.cnet.com/news/ericsson-predicts-tenfold-increase-inmobile-data-traffic-in-five-years/ Acesso em: 28 set. 2014.
[4] - E-THESIS. Small cells: você ainda vai ter a sua... Disponível em:
http://www.e-thesis.inf.br/index.php?option=com_content&task=view&id=7912&Itemi
d=52 Acesso em: 4 out. 2014.
[5] - SINDITELEBRASIL, SINDICATO NACIONAL DAS EMPRESAS DE
TELEFONIA E DE SERVIÇO MÓVEL CELULAR E PESSOAL. Copa 2014: mais de
1 milhão de comunicação de dados no jogo do Brasil x Croácia. Disponível em:
http://www.sinditelebrasil.org.br/sala-de-imprensa/na-midia/2210-copa-2014-mais-de1-milhao-de-comunicacao-de-dados-no-jogo-do-brasil-x-croacia Acesso em: 5 out.
2014.
[6] - TELECO. Redes WiMAX: Regras para o Dimensionamento Disponível em:
http://www.teleco.com.br/tutoriais/tutorialredeswimax/pagina_4.asp Acesso em: 27 set.
2014.
[7] - UFRGS. O Efeito Hall. Disponível em:
www.if.ufrgs.br/tex/fis142/mod08/m_s03.html Acesso em: 26 jul. 2014.
[8] - V. A. SOUZA. Comunicação RS232 e RS485 (2010). Disponível em:
http://www.ebah.com.br/content/ABAAAAMYcAI/protocolos-rs232-rs485 Acesso em:
20 jul. 2014.
[9] - WEG. Manual da Comunicação Serial RS232 / RS485, Série: CFW-11, Número
do Documento: 0899.5740 / 03 (2010). Disponível em:
http://ecatalog.weg.net/files/wegnet/WEG-cfw-11-manual-da-comunicacao-serialrs232-rs485-0899.5740-manual-portugues-br.pdf Acesso em: 19 jul. 2014.
49
Anexo 1 – Esquema Elétrico
50
51
52
53
54
55
Anexo 2 – Código “Main”
MSP_A
#include <msp430f5529.h>
volatile unsigned int results[10];
// Needs to be global in this example
// Otherwise, the compiler removes it
// because it is not used for
anything.
unsigned int c;
int Analog;
int RS485_check = 0;
void Pass(void)
{
unsigned int a;
P2OUT |=
P1OUT |=
P6OUT &=
for(a=0;
BIT7;
BIT6;
~BIT6;
a<10000; a++);
while (!(UCA1IFG&UCTXIFG));
UCA1TXBUF = 'p';
//
//
//
//
DESLIGA VCC_RIB
SET UART MSPA=MSPB
SET UART MSPA=MSPB
delay
// USCI_A0 TX buffer ready?
// TX -> RXed character
}
void Fail(void)
{
unsigned int b;
P2OUT |=
P1OUT |=
P6OUT &=
for(b=0;
BIT7;
BIT6;
~BIT6;
b<10000; b++);
while (!(UCA1IFG&UCTXIFG));
UCA1TXBUF = 'f';
//DESLIGA VCC_RIB
// SET UART MSPA=MSPB
// SET UART MSPA=MSPB
// delay
// USCI_A0 TX buffer ready?
// TX -> RXed character
}
int main(void)
{
WDTCTL = WDTPW+WDTHOLD;
// Stop watchdog timer
//Configuração portas
P2DIR |= BIT7;
P2OUT |= BIT7;
// RIB_ON/OFF
// DESLIGA
P3DIR &= ~BIT1;
P3REN |= BIT1;
P3OUT |= BIT1;
// START_BUTTON
// ATIVA PULL UP/DOWN
// SET PULLUP
P6DIR &= ~BIT5;
// I_SUPERV (ANALOGICO)
P1DIR |= BIT6;
P6DIR |= BIT6;
// UART SELECT = A
// UART SELECT = B
56
//Configuração UART
P3SEL = BIT3+BIT4;
// P3.4,5 = USCI_A0 TXD/RXD
UCA0CTL1 |= UCSWRST;
// **Put state machine in reset**
UCA0CTL1 |= UCSSEL_2;
// SMCLK
UCA0BR0 = 6;
// 1MHz 9600 (see User's Guide)
UCA0BR1 = 0;
// 1MHz 9600
UCA0MCTL = UCBRS_0 + UCBRF_13 + UCOS16;
// Modln UCBRSx=0, UCBRFx=0,
UCA0CTL1 &= ~UCSWRST;
// **Initialize USCI state machine**
UCA0IE |= UCRXIE;
// Enable USCI_A0 RX interrupt
__bis_SR_register(GIE);
// interrupts enabled
//Configuração ADC
P6SEL = 0x0F;
// Enable A/D channel inputs
ADC12CTL0 = ADC12ON+ADC12MSC+ADC12SHT0_2; // Turn on ADC12, set sampling
time
ADC12CTL1 = ADC12SHP+ADC12CONSEQ_1; // Use sampling timer, single sequence
ADC12MCTL0 = ADC12INCH_0;
// ref+=AVcc, channel = A0
ADC12MCTL1 = ADC12INCH_1;
// ref+=AVcc, channel = A1
ADC12MCTL2 = ADC12INCH_2;
// ref+=AVcc, channel = A2
ADC12MCTL3 = ADC12INCH_3+ADC12EOS;
// ref+=AVcc, channel = A3, end seq.
ADC12MCTL5 = ADC12INCH_5;
// ref+=AVcc, channel = A5
ADC12IE = 0x08;
ADC12CTL0 |= ADC12ENC;
// Enable ADC12IFG.3
// Enable conversions
while(1)
{
nok:
while((P3IN & BIT1)==0);// Aguarda o operador acionar o botão START
for(c=0; c<15000; c++);
// Delay
P2OUT &= ~BIT7;
// Acionada a alimentação da RIB
for (c=1; c<4000; c++);
// Delay para a RIB estabilizar
// Leitura da corrente
ADC12CTL0 |= ADC12SC;
// Start convn - software trigger
Analog = ADC12MEM5;
// Leitura analogica do I_Superv
if ((90 < Analog) && (Analog < 150)) // Limites de corrente de uma
placa ok
goto ok;
// se ok continua para proxima etapa
else
{
Fail();
goto nok;
// senão termina o teste
}
ok:
for(c=1; c<10000; c++);
//Inicio do teste RS485
P1OUT &= ~BIT6;
P6OUT &= ~BIT6;
// delay
// SET UART RS485
// MSP_A = UART_A / MSP_B = UART_D
for(c=1; c<10000; c++);
// delay
while (!(UCA1IFG&UCTXIFG));
UCA1TXBUF = 'a';
for(c=1; c<20000; c++)
// USCI_A0 TX buffer ready?
// TX -> RXed character
57
{
if(RS485_check == 1) goto ok1;
}
Fail();
// RS485 ok!
ok1:
Pass();
}
}
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=ADC12_VECTOR
__interrupt void ADC12ISR (void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(ADC12_VECTOR))) ADC12ISR (void)
#else
#error Compiler not supported!
#endif
{
switch(__even_in_range(ADC12IV,34))
{
case 0: break;
// Vector 0: No interrupt
case 2: break;
// Vector 2: ADC overflow
case 4: break;
// Vector 4: ADC timing
overflow
case 6: break;
// Vector 6: ADC12IFG0
case 8: break;
// Vector 8: ADC12IFG1
case 10: break;
// Vector 10: ADC12IFG2
case 12:
// Vector 12: ADC12IFG3
results[0] = ADC12MEM0;
// Move results, IFG is cleared
results[1] = ADC12MEM1;
// Move results, IFG is cleared
results[2] = ADC12MEM2;
// Move results, IFG is cleared
results[3] = ADC12MEM3;
// Move results, IFG is cleared
results[5] = ADC12MEM5;
__bic_SR_register_on_exit(LPM4_bits);
// Exit active CPU, SET
BREAKPOINT HERE
case 14: break;
// Vector 14: ADC12IFG4
case 16: break;
// Vector 16: ADC12IFG5
case 18: break;
// Vector 18: ADC12IFG6
case 20: break;
// Vector 20: ADC12IFG7
case 22: break;
// Vector 22: ADC12IFG8
case 24: break;
// Vector 24: ADC12IFG9
case 26: break;
// Vector 26: ADC12IFG10
case 28: break;
// Vector 28: ADC12IFG11
case 30: break;
// Vector 30: ADC12IFG12
case 32: break;
// Vector 32: ADC12IFG13
case 34: break;
// Vector 34: ADC12IFG14
default: break;
}
}
// Echo back RXed character, confirm TX buffer is ready first
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=USCI_A0_VECTOR
__interrupt void USCI_A0_ISR(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(USCI_A0_VECTOR))) USCI_A0_ISR (void)
#else
#error Compiler not supported!
58
#endif
{
switch(__even_in_range(UCA0IV,4))
{
case 0:break;
case 2:
if(UCA1RXBUF == 'b')
{
RS485_check = 1;
}
break;
case 4:break;
default: break;
}
}
// Vector 0 - no interrupt
// Vector 2 - RXIFG
// Vector 4 - TXIFG
59
MSP_B
#include <msp430f5529.h>
int main(void)
{
WDTCTL = WDTPW+WDTHOLD;
// Stop watchdog timer
//Configuração portas
P1DIR |= BIT4;
P1OUT &= ~BIT4;
// LED_PASS
// APAGA
P1DIR |= BIT5;
P1OUT &= ~BIT5;
// LED_FAIL
// APAGA
//Configuração UART
P3SEL = BIT3+BIT4;
// P3.4,5 = USCI_A0 TXD/RXD
UCA0CTL1 |= UCSWRST;
// **Put state machine in reset**
UCA0CTL1 |= UCSSEL_2;
// SMCLK
UCA0BR0 = 6;
// 1MHz 9600 (see User's Guide)
UCA0BR1 = 0;
// 1MHz 9600
UCA0MCTL = UCBRS_0 + UCBRF_13 + UCOS16;
// Modln UCBRSx=0, UCBRFx=0,
UCA0CTL1 &= ~UCSWRST;
// **Initialize USCI state machine**
UCA0IE |= UCRXIE;
// Enable USCI_A0 RX interrupt
__bis_SR_register(GIE);
// interrupts enabled
while(1);
}
// Echo back RXed character, confirm TX buffer is ready first
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=USCI_A0_VECTOR
__interrupt void USCI_A0_ISR(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(USCI_A0_VECTOR))) USCI_A0_ISR (void)
#else
#error Compiler not supported!
#endif
{
switch(__even_in_range(UCA0IV,4))
{
case 0:break;
// Vector 0 - no interrupt
case 2:
// Vector 2 - RXIFG
if(UCA1RXBUF == 'a')
// RS485 TEST
{
while (!(UCA1IFG&UCTXIFG));
// USCI_A0 TX buffer ready?
UCA1TXBUF = 'b';
}
if(UCA1RXBUF == 'p') P1OUT |= BIT4;
// LED_PASS ON
if(UCA1RXBUF == 'f')
P1OUT |= BIT5;
// FAIL_PASS ON
60
break;
case 4:break;
default: break;
}
// Vector 4 - TXIFG
}
61