Introdução
1
Em estática estudamos o equilíbrio dos
corpos sob a ação de forças que são aplicadas a eles. Nosso objetivo é fornecer
uma introdução à ciência, à habilidade e
à arte envolvidas na modelagem e projeto de sistemas mecânicos cotidianos.
Começaremos o estudo da estática com
uma visão geral, partindo depois para os
elementos da física e da matemática (especialmente vetores) necessários para
analisar o equilíbrio das partículas e dos
corpos rígidos. Ao longo do livro, veremos
muitas discussões e aplicações de projetos de engenharia.
1.1
ENGENHARIA E ESTÁTICA
Os engenheiros projetam estruturas, máquinas, processos e muito mais para o
benefício da humanidade. No processo de desenvolvimento, eles devem responder a questões como “Isto é forte o bastante?”, “Durará muito tempo?”
e “É seguro o suficiente?”. Para responder a essas questões, necessitamos da
habilidade de quantificar fenômenos importantes no projeto ou sistema que
temos em mãos, e comparar essas medidas com critérios conhecidos para o que
é aceito ou não. Para tanto, é preciso que o engenheiro tenha conhecimentos
aprofundados de ciência, matemática e ferramentas computacionais, e criatividade para explorar as leis da natureza no desenvolvimento de novos projetos.
O cerne de tudo é a habilidade de idealizar problemas cotidianos com modelos
matemáticos que capturem a ciência essencial do problema, de forma a serem
suficientemente tratáveis para serem analisados. A proficiência em tal habilidade é uma característica que leva a engenharia para além da ciência pura.
Na maioria das disciplinas de engenharia, entender a resposta de materiais ou objetos sujeitos à ação de forças é importante, e os conceitos fundamentais da ciência que regem essa resposta são conhecidos como mecânica
newtoniana.* Este livro examina aplicações deste tópico para problemas de
* Quando a velocidade de um objeto está próxima da velocidade da luz, a física relativística é requerida.
_Livro_Plesha.indb 1
17/09/13 15:51
2
Mecânica para engenharia: estática
Estática
Dinâmica
Dinâmica avançada
Mecânica dos materiais
Mecânica avançada
de materiais
Vibrações
Controles
Análise (computacional)
de elementos finitos
Robótica
Análise estrutural
Astrodinâmica
Estruturas aeroespaciais
Mecânica de satélites
Projeto de máquinas
Dinâmica de máquinas
Projeto de aço e concreto
Mecânica dos solos e rochas
Biomecânica
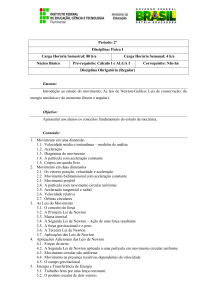
Figura 1.1 Hierarquia das disciplinas e temas frequentemente estudados em engenharia. As disciplinas em estática, dinâmica e mecânica dos materiais fornecem conceitos
fundamentais e uma base para estudos mais avançados. Muitos temas, como vibrações e
análise de elementos finitos, desenvolvem fortemente conceitos de dinâmica e mecânica
dos materiais.
engenharia quando um sistema se encontra em equilíbrio de forças; por isso,
esta disciplina é chamada de estática. A estática costuma ser a primeira disciplina dos cursos de engenharia. Ela é um assunto importante por si só e desenvolve a base essencial para estudos mais avançados
Se você está lendo isto, é porque quer estudar estática, e este livro deverá
ajudá-lo. Na Figura 1.1 vemos a hierarquia das disciplinas, muitas das quais
você estudará em engenharia. Seguindo a disciplina de estática, há disciplinas
introdutórias em dinâmica e mecânica dos materiais. A dinâmica estuda o movimento de partículas e corpos sujeitos a forças que não estão em equilíbrio. A
mecânica dos materiais introduz modelos para o comportamento dos materiais
e métodos para determinar tensões e deformações em estruturas. Os conceitos
aprendidos nessas três disciplinas básicas são usados diariamente por quase
todos os engenheiros que lidam com a resposta mecânica de estruturas e materiais! Seguindo essas disciplinas básicas, temos uma ampla variedade de temas
avançados, como vibrações, análise de tensões, robótica, análise de elementos
finitos, projeto de máquinas, projeto de estruturas em aço e concreto, e assim
por diante.
O objetivo deste livro é fornecer um conhecimento sólido e abrangente em estática. Frequentemente, quando os problemas de engenharia são
resumidos em seus elementos essenciais, eles se tornam notavelmente sim-
_Livro_Plesha.indb 2
17/09/13 15:51
Capítulo 1 Introdução
3
ples de ser analisados. Na verdade, como veremos ao longo deste livro, a
matemática necessária para analisar problemas é simples. O grande desafio
encontra-se geralmente na idealização de um problema cotidiano por um
modelo, mas acreditamos que você aprenderá a desenvolver suas habilidades para fazer isso.
1.2
UMA BREVE HISTÓRIA DA ESTÁTICA*
A história da estática está intimamente ligada ao desenvolvimento da dinâmica e da mecânica dos materiais. Os primeiros cientistas e engenheiros foram
chamados de filósofos, e seu nobre empreendimento foi usar o raciocínio lógico para fornecer explicações para os fenômenos naturais. A maior parte de
seu foco estava no entendimento e na descrição do equilíbrio de objetos e no
movimento dos corpos celestiais. Com poucas exceções, seus estudos tinham
que render resultados que fossem intrinsecamente belos e/ou compatíveis com
a religião dominante na época e local. O que segue é um curto levantamento
histórico dos principais personagens, os quais influenciaram profundamente o
desenvolvimento de aspectos-chave da mecânica, e que são também especialmente significativos na estática.
Por séculos, os filósofos estudaram o equilíbrio e o movimento dos corpos com pouco entendimento, o qual às vezes era incorreto. Dentre esses notáveis precursores estão:
• Aristóteles (384-322 a.C.), que escreveu sobre ciência, política, economia e biologia, e propôs o que é frequentemente chamado de “física do
senso comum”. Ele estudou alavancas e, embora tenha atribuído sua eficiência às propriedades “mágicas” do círculo, entendeu alguns conceitos
básicos do momento de uma força e seus efeitos no equilíbrio. Aristóteles
classificou os objetos como leves ou pesados, e acreditava que os objetos
leves caíam mais devagar do que os objetos pesados. Ele também reconheceu que os objetos podiam se mover em outras direções, além de para
cima ou para baixo, e disse que isso era contrário ao movimento natural
do corpo, e que alguma força devia continuar a agir no corpo para que
ele se movesse nesse caminho. Mais importante, afirmou que o estado
natural dos objetos é estar em repouso.
• Arquimedes (287-212 a.C.), que postulou vários axiomas baseados em
observações experimentais do equilíbrio das alavancas e, usando-os, provou várias proposições. Seu trabalho mostra um avanço no entendimento
dos efeitos do momento de uma força no equilíbrio. Arquimedes é talvez
mais conhecido pelo trabalho pioneiro sobre hidrostática da mecânica
dos fluidos, em que uma de suas descobertas é a de que um corpo que é
colocado em um fluido deslocará um volume de fluido cujo peso é igual
ao peso do corpo. Recentemente, foram encontradas evidências de que
ele também tenha descoberto alguns conceitos elementares de cálculo.
• Leonardo da Vinci (1452-1519), cuja imaginação ativa o levou a abordar uma ampla variedade de problemas. Ele entendeu corretamente o
* Esta história foi selecionada dos excelentes trabalhos de C. Truesdell, Essays in the
History of Mechanics, Springer-Verlag, Berlin, 1968; I. Bernard Cohen, The Birth of a
New Physics, edição revisada e atualizada, W. W. Norton & Company, New York, 1985;
R. Dugas, A History of Mechanics, Dover, Mineola, NY, 1988; e James H. Williams, Jr.,
Fundamentals of Applied Dynamics, John Wiley & Sons, New York, 1996.
_Livro_Plesha.indb 3
Fato interessante
Início do desenvolvimento de códigos estruturais Enquanto a maior
parte da nossa discussão foca a realização dos filósofos, houve também
outras realizações significantes no
desenvolvimento de códigos de projeto estruturais ao longo de séculos.
Alguns desses incluem os livros antigos de Ezequiel e Vitruvius e os livros
secretos das lojas maçônicas medievais. J. (Veja-se, por exemplo, Heyman,
“Truesdell and the History of the Theory of Structures”, um capítulo em Essays on the History of Mechanics, editado por A. Becchi, M. Corradi, F. Foce
e O. Pedemonte, Birkhauser, Boston,
2003.) Esses códigos eram regras de
proporção amplamente empíricas utilizadas no projeto e construção de estruturas de alvenaria. Os grandes templos gregos, os aquedutos romanos e
as catedrais góticas são testemunhas
de sua capacidade. Embora os autores
desses códigos não fossem filósofos,
suas realizações de engenharia foram
impressionantes.
O Partenon em Atenas, Grécia, foi terminado em 438 a.C, e é um exemplo
da precoce construção de colunas e
vigas em alvenaria.
17/09/13 15:51
4
Mecânica para engenharia: estática
momento da força e usou a terminologia braço de alavanca potencial
para descrever o que chamamos hoje de braço de momento. Embora suas
conclusões estivessem erradas, ele estudou o equilíbrio de um corpo suportado por duas cordas. E também conduziu experimentos de resistência
de materiais estruturais.
Seguindo o progresso destes e de muitos outros filósofos iniciais, vem o
trabalho de Galileu e Newton. Com eles há um rápido progresso na consecução dos elementos essenciais de uma teoria do movimento dos corpos, e suas
realizações representam o mais importante marco na história da mecânica até o
trabalho de Einstein. As contribuições de Galileu e Newton são discutidas em
mais detalhes no decorrer desta seção.
Galileu Galilei (1564-1642)
Figura 1.2
Retrato de Galileu pintado em 1636 por
Justus Sustermans.
Galileu Galilei (1564-1642) teve grande interesse em matemática, mecânica,
astronomia, calor e magnetismo. Fez importantes contribuições ao longo da
vida, apesar da perseguição da Igreja por seu apoio à teoria de Copérnico de
que a Terra não era o centro do Universo. Uma de suas mais importantes contribuições foi seu raciocínio experimental no qual concluiu que um corpo em
seu estado natural de movimento tem velocidade constante. Galileu descobriu
a lei correta para a queda livre de um corpo: a distância percorrida pelo corpo
é proporcional ao quadrado do tempo. E concluiu também que dois corpos de
pesos diferentes cairão com a mesma taxa de velocidade, e que quaisquer diferenças são devidas à resistência do ar. Galileu desenvolveu uma teoria (com
alguns pequenos erros) para a resistência de vigas, como a mostrada na Fig.
1.3. Ele foi o primeiro a usar o conceito de tensão como uma medida fundamental da carga que o material suporta, e é visto como o pai da mecânica dos
materiais. Ele descobriu também que a resistência das estruturas não é medida
linearmente; isto é, se as dimensões de uma viga são dobradas, a carga que a
viga pode suportar não dobra. Por isso, especulou que árvores e animais, por
exemplo, possuem limites naturais para seu tamanho antes que possam falhar sobre seu próprio peso. Mais importante, seu trabalho mostrou que novas,
estruturas maiores não podem ser necessariamente feitas a partir da simples
ampliação das dimensões de estruturas menores que foram construídas com
sucesso.
Isaac Newton (1643*-1727)
Figura 1.3
Um desenho da última obra de Galileu, Discursos sobre duas novas ciências, publicada em 1638, onde ele estuda a resistência
das vigas, entre vários outros tópicos.
_Livro_Plesha.indb 4
Newton foi um dos maiores cientistas de todos os tempos. Fez importantes
contribuições em ótica, astronomia, matemática e mecânica, e sua obra Princípios matemáticos da filosofia natural, ou Princípios, como é geralmente conhecida, publicada em 1687, é considerada por muitos a maior obra científica
já escrita.
Em Princípios, Newton analisou o movimento dos corpos como “resistentes” e “não resistentes”. Ele aplicou seus resultados a corpos em órbita,
projéteis, pêndulos e objetos em queda livre próximo à Terra. Comparando sua
“lei da força centrífuga” com a terceira lei de Kepler do movimento planetário,
Newton ajudou a demonstrar que os planetas eram atraídos pelo Sol por uma
força que variava com o inverso do quadrado da distância, e generalizou que
* Data de acordo com o calendário gregoriano, ou “moderno”. Pelo calendário juliano, o
qual era usado na Inglaterra à época, Newton nasceu em 1642.
17/09/13 15:51
Capítulo 1 Introdução
todos os corpos celestes são mutuamente atraídos na mesma direção. No primeiro livro de Princípios, Newton desenvolveu suas três leis do movimento;
no segundo livro, alguns conceitos em mecânica dos fluidos, ondas, e outras
áreas da física; e no terceiro livro, sua lei da gravitação universal. Suas contribuições no primeiro e no terceiro livros são especialmente significativas para a
estática e a dinâmica.
O Princípios de Newton foi a peça final na base das leis que governam
o movimento dos corpos. Dizemos base porque ela tomou o trabalho de
Daniel Bernoulli (1700-1782), Johann Bernoulli (1667-1748), Jean le Rond
d’Alembert (1717-1783), Joseph-Louis Lagrange (1736-1813) e Leonhard
Euler (1707-1783) para esclarecer, aperfeiçoar e progredir a teoria da dinâmica dentro do formato que é usado atualmente. As contribuições de Euler
são especialmente notáveis, uma vez que ele usou o trabalho de Newton
para desenvolver a teoria da dinâmica dos corpos rígidos*. Os trabalhos
de Newton, juntamente com os de Galileu, também forneceram a base da
teoria do comportamento mecânico dos corpos deformáveis, comumente
chamada de mecânica dos materiais. Contudo, ela aproveitou o trabalho de
Charles-Augustin Coulomb (1736-1806), Claude Louis Marie Henri Navier
(1785-1857) e Augustin Cauchy (1789-1857) para aperfeiçoar ainda mais
o conceito de tensão dentro do formato atual; o trabalho de Robert Hooke
(1635-1703) e Thomas Young (1773-1829) para desenvolver uma teoria
para a deformação elástica dos materiais; e o trabalho de Leonhard Euler
para considerar as deformações de uma estrutura (em particular na zona
elástica).†
1.3
5
Figura 1.4
Um retrato de Newton pintado em 1689
por Sir Godfrey Kneller, o qual pertence ao
décimo Conde de Portsmouth. Ele mostra
Newton antes de ir para Londres tomar o
cargo de Inventor Real, quando estava em
seu auge científico.
PRINCÍPIOS FUNDAMENTAIS
Espaço e tempo É muito provável que você já tenha um bom entendimento intuitivo dos conceitos de espaço e tempo. Na verdade, aperfeiçoar
conceitos de espaço e tempo não é fácil e pode não servir aos esclarecimentos que gostaríamos. Espaço é o conjunto de todas as posições que um
ponto pode ocupar no nosso universo. O local de um ponto é normalmente
descrito com um sistema de coordenadas, onde as medições são feitas a
partir de alguma posição de referência usando as direções de referência do
sistema de coordenadas. Embora a seleção de uma posição e das direções
de referência seja arbitrária, ela é geralmente baseada na conveniência. Devido ao espaço ser tridimensional, três variáveis, chamadas coordenadas,
são necessárias para localizar um ponto no espaço. Geralmente usamos um
sistema de coordenadas cartesianas retangulares no qual as distâncias até
um ponto são medidas em três direções ortogonais a partir de um local de
referência. Outros sistemas de coordenadas, tais como coordenadas esféricas e cilíndricas (e coordenadas polares em duas dimensões), às vezes são
mais convenientes. Todos os problemas de engenharia são tridimensionais,
mas também podemos idealizar um problema como bidimensional ou unidimensional. O tempo fornece uma medida de quando um evento, ou uma
sequência de eventos, ocorre.
* Para comentários adicionais a respeito da dinâmica, ver G. L. Gray, F. Costanzo e M. E.
Plesha, Mecânica Vetorial: Dinâmica, McGraw-Hill, New York, 2009.
†
Para comentários adicionais a respeito da mecânica dos materiais, ver M. Vable, Mechanics of Materials, Oxford University Press, New York, 2002.
_Livro_Plesha.indb 5
17/09/13 15:51
6
Mecânica para engenharia: estática
Massa e força Massa é a quantidade de matéria, ou material, em um objeto.
Força é uma ação capaz de produzir movimento em um objeto. Forças podem
surgir do contato ou interação entre objetos, através de atração gravitacional
ou magnética, entre outras. Como discutido na Seção 1.5, a interpretação e a
quantificação da massa e da força devem ser vistas como estando relacionadas
à segunda lei de Newton do movimento. A força será discutida mais adiante,
na Seção 1.4.
Uma partícula é um objeto cuja massa está concentrada em um
ponto. Por essa razão, uma partícula é também chamada de massa pontual,
e se diz que tem volume zero. Uma consequência importante dessa definição
é que o conceito de movimento rotacional da partícula é inexpressivo. Obviamente, não há partículas reais na natureza, mas sob adequadas circunstâncias
é possível idealizar objetos reais como partículas. Objetos relativamente pequenos podem ser idealizados como partículas em um problema. Por exemplo,
para determinar a órbita de um satélite ao redor da Terra, podemos idealizá-lo
como uma partícula. Os objetos não precisam, necessariamente, ser pequenos
para serem idealizados como partículas. Por exemplo, para um satélite em órbita, a Terra não é pequena, mas para muitos propósitos nosso planeta pode ser
idealizado como sendo apenas uma partícula.
Partícula
Um corpo tem massa e ocupa volume no espaço. Na
natureza, todos os corpos são deformáveis. Ou seja, quando um corpo está
sujeito a forças, a distância entre quaisquer pontos no corpo podem mudar.
Um corpo rígido é um corpo que não é deformável, e por isso a distância entre
quaisquer pontos nele nunca muda. Não existem corpos rígidos reais na natureza, mas isso não significa que não podemos idealizar um objeto como um
corpo rígido, o que proporciona uma considerável simplificação devido ao fato
de que os complexos detalhes de como o corpo se deforma não precisam ser
contabilizados em uma análise. Além disso, em estática estaremos habilitados
a fazer afirmações precisas sobre o comportamento de corpos rígidos, e estabeleceremos métodos de análise exatos.
Corpo e corpo rígido
Alerta de conceito
Vetores Um vetor é uma entidade que
possui tamanho e direção. Os vetores
são muito úteis em mecânica, e a habilidade de usá-los para representar
força, posição e outras entidades é
essencial.
Escalares e vetores Um escalar é uma grandeza caracterizada completamente por um único número. Por exemplo, temperatura, comprimento e
densidade são escalares. Neste livro, os escalares estão denotados por símbolos em itálico, como s. Um vetor é uma entidade que possui tamanho (ou
magnitude) e direção. Muito será dito sobre os vetores no Capítulo 2, mas
algumas noções básicas já serão úteis imediatamente. Afirmações como
“meu apartamento está 1 km a nordeste do Salão de Engenharia” ou “estou caminhando para o norte a 3 km/h” são demonstrações de quantidades
vetoriais. No primeiro exemplo, a posição de um local em relação a outro
é especificada, enquanto no segundo exemplo a velocidade é especificada.
Em ambos os casos, as noções norte e leste de referência são utilizadas. Os
vetores são muito úteis para descrever diversas entidades em mecânica. Eles
oferecem uma representação compacta e de fácil manipulação, e podem ser
transformados. Ou seja, se um vetor está estabelecido em um conjunto de
coordenadas direcionais, ao utilizarmos determinadas regras de transformação, ele poderá ser conhecido em qualquer outro conjunto de coordenadas
direcionais. Neste livro, os vetores são denotados por uma flecha em cima
do símbolo do vetor, como .
Posição, velocidade e aceleração são
exemplos de vetores. Se considerarmos uma partícula que possui posição re-
Posição, velocidade e aceleração
_Livro_Plesha.indb 6
17/09/13 15:51
Capítulo 1 Introdução
7
lativa a alguma localização, então a velocidade da partícula é a taxa de variação
no tempo de sua posição:
(1.1)
onde d / dt significa a derivada em relação ao tempo.* Similarmente, a aceleração é a taxa de variação da velocidade no tempo:
(1.2)
, nossa
Uma vez que a estática está preocupada com situações em que
discussão das Eqs. (1.1) e (1.2) será breve. Se a aceleração de uma partícula é
zero, então a integração da Eq. (1.2) mostra que a partícula possui velocidade
constante, que pode ser igual ou diferente de zero. Se a velocidade é zero, então
a Eq. (1.1) mostra que a posição da partícula não varia; mas se a velocidade é
diferente de zero, a integração da Eq. (1.2) mostra que a posição da partícula
varia linearmente em função do tempo. Se a aceleração é diferente de zero,
então a partícula se moverá com velocidade e posição variáveis no tempo.
Leis do movimento de Newton
Inspirado no trabalho de Galileu e no de outros, Newton postulou suas três leis
do movimento em 1687:
Primeira lei Uma partícula permanece em repouso, ou continua a se mover em
linha reta com velocidade uniforme, se não houver força desbalanceada
agindo sobre ela.
A aceleração de uma partícula é proporcional à força resultante
que age sobre ela e ocorre na direção da força. A afirmação matemática
desta lei† é
Segunda lei
(1.3)
onde F é a força resultante atuando na partícula, é a aceleração da partícula,
e a constante de proporcionalidade é a massa m da partícula. Na Eq. (1.3), F
e são vetores, significando que possuem magnitude (ou módulo), direção e
sentido. Os vetores serão discutidos em mais detalhes no Capítulo 2.
Terceira lei As forças de ação e reação entre corpos que interagem são iguais
em magnitude, opostas em sentido, e colineares.
Alerta de conceito
As leis do movimento de Newton, especialmente a da Eq. (1.3), são a base da
mecânica. São postulados cuja validade e exatidão foram confirmadas por incontáveis experimentos e aplicações ao longo de mais de três séculos. Infelizmente, não há uma prova fundamental de sua validade, e temos de aceitá-las
como regras que a natureza segue. A primeira regra foi originalmente estabe-
Segunda lei de Newton A segunda lei
de Newton,
, é o princípio fundamental mais importante em que estática, dinâmica e mecânica se baseiam.
* As Eqs. (1.1) e (1.2) são válidas independentemente de como o vetor deve ser representado. Contudo, os detalhes de como a derivada no tempo é calculada depende da representação do vetor (isto é, cartesiana, esférica, etc.) que é usada. A dinâmica explora esses
detalhes mais adiante.
†
Na verdade, Newton expôs sua segunda lei na forma mais geral F = d(m )/dt, onde é
a velocidade da partícula e d(m )/dt é a taxa de variação no tempo do produto m , o qual
é chamado de momento da partícula. Quando a massa é constante, essa equação transforma-se na Eq. (1.3). Para problemas nos quais a massa não é constante, como no movimento
de um foguete que queima massa substancial de combustível, a forma mais geral da segunda lei de Newton é necessária.
_Livro_Plesha.indb 7
17/09/13 15:51
8
Mecânica para engenharia: estática
Fato interessante
Medindo a força Além da capacidade
de produzir aceleração em um corpo
sem suporte, uma força causa deformação em um corpo, ou mudança de
forma. Isso sugere duas maneiras de
medir a força. Primeiro, para um corpo
em aceleração e com massa m conhecida, medimos a aceleração ; logo,
podemos determinar a força aplicada ao corpo, usando a lei de Newton
Esta abordagem é comum
em mecânica celeste e movimento de
projéteis, mas não pode ser usada em
objetos que estão em equilíbrio estático.
Uma segunda abordagem, que é
mais comum para aplicações estáticas
e dinâmicas, é medir a deformação
(isto é, a mudança de forma) que a
força produz no objeto cujo comportamento é conhecido. Um exemplo é a
balança de molas manual que é usada
para pesar bananas.
O peso das bananas faz o comprimento da mola mudar, e como a rigidez
da mola é conhecida, a força aplicada
pelas bananas sobre a balança pode
ser determinada. Uma breve discussão
histórica das medidas de massa e força é dada em notas sobre a dinâmica
em J. C. Maxwell, Matter and Motion,
Dover Publications, Inc., New York,
1991, com prefácio de 1877. Uma discussão mais contemporânea sobre as
medidas de força (e medidas em geral)
está disponível no National Institute of
Standards and Technology (NIST) (ver
http://www.nist.gov/).
lecida por Galileu. Das três leis, apenas as duas últimas são independentes.
Na Eq. (1.3), vemos que se a força resultante F agindo na partícula é zero,
então a aceleração da partícula também é zero, e por isso ela pode se mover
com velocidade uniforme, que pode ser igual ou diferente de zero em valor.
Portanto, quando não existe aceleração (isto é,
), diz-se que a partícula
está em equilíbrio estático. A terceira lei desempenhará um importante papel
na elaboração de diagramas de corpo livre, os quais veremos que são uma
ajuda essencial na aplicação de
1.4
FORÇA
Forças são de evidente importância para nós. Em estática, estamos geralmente
interessados em como as estruturas suportam as forças que nelas são aplicadas,
e em como projetar estruturas que suportem forças. Em dinâmica, geralmente
estamos interessados no movimento dos objetos causado por forças aplicadas
neles. Nesta seção, discutiremos a força em alguns detalhes, examinaremos
alguns diferentes tipos de força e veremos como as forças são produzidas.
De forma simples, uma força é qualquer agente capaz de produzir aceleração em um corpo sem suporte.* Embora essa definição possa parecer vaga,
ela é compreensível. Todas as forças são produzidas a partir da interação de
dois ou mais corpos (ou conjuntos de matéria), a qual pode assumir diversas
formas que dão origem aos diferentes meios de produzir forças.
Para muitos propósitos, uma força pode ser categorizada como de contato ou de campo.
• Força de contato Quando dois corpos se tocam, desenvolvem-se forças de contato entre eles. Em geral, as forças de contato são distribuídas
sobre uma área finita de contato – são forças distribuídas com dimensões
de força/área. Se os corpos se tocam em uma pequena região, ou se trocarmos a força distribuída por uma força concentrada equivalente, como
discutido no Capítulo 7, então as forças de contato são concentradas em
um ponto. As forças de contato são formadas de duas partes: uma força
na direção normal e uma força na direção tangencial, que é também chamada de força de atrito. Exemplos de forças de contato incluem as forças
entre seus pés e o solo quando você está parado, e a força aplicada pelo ar
em um edifício durante uma ventania.
• Força de campo Uma força entre corpos que atua através do espaço é
chamada de força de campo. As forças de campo agem através de todo o
volume de um objeto e por isso possuem dimensões de força/volume. As
forças de campo são frequentemente chamadas de forças de corpo. Para
muitas aplicações, podemos representar uma força de campo por uma
força concentrada que age em um ponto. Exemplos de forças de campo
incluem o peso de um objeto, a força atrativa entre a Terra e a Lua, e a
força de atração entre um ímã e um objeto de ferro.
Alguns exemplos de forças de contato e de campo são dados na Figura 1.5.
Apesar de a definição das forças de contato dada anteriormente ser útil,
uma reflexão mais cuidadosa em uma escala de comprimento atômica mostra
que as forças de contato são na verdade um caso especial de uma força de
campo. Imagine, por exemplo, que os átomos de duas superfícies opostas se
aproximam gradualmente; eles não se tocam, mas desenvolvem uma força de
* Quando um corpo específico acelera ou não depende da resultante de todas as forças nele
aplicadas.
_Livro_Plesha.indb 8
17/09/13 15:51
Capítulo 1 Introdução
9
campo repulsiva que aumenta à medida que chegam mais perto um do outro.
Contudo, o intervalo de distâncias sob a qual essas forças atuam é muito pequeno (na ordem de dimensões atômicas), e, para aplicações macroscópicas,
nossa definição de forças de contato permanece útil.
1.5
UNIDADES E CONVERSÃO DE UNIDADES
As unidades são uma parcela essencial de qualquer medida quantificável. A lei
de Newton
, escrita aqui de forma escalar, prevê a formulação de um
consistente e inequívoco sistema de unidades. Neste livro, empregaremos as unidades SI (Sistema Internacional*), como mostrado na Tabela 1.1.
Tabela 1.1 Sistemas de unidades SI
Dimensão-base
SI
força
massa
comprimento
tempo
newtona(N) ≡ kg·m/s2
quilograma (kg)
metro (m)
segundo (s)
ª Unidade derivada
Cada sistema possui três unidades-base e uma quarta unidade derivada. No
sistema SI, as unidades-base medem massa, comprimento e tempo usando kg,
m e s, respectivamente; e a unidade derivada é obtida da equação
,a
qual nos dá a unidade de força em kg·m/s2, que é definida como 1 newton,
N. Podemos, ocasionalmente, usar medidas diferentes, mas consistentes, para
algumas unidades. Por exemplo, podemos usar minutos em vez de segundos,
gramas em vez de quilogramas e assim por diante. Contudo, a definição de 1
newton será sempre como mostrada na Tabela 1.1.
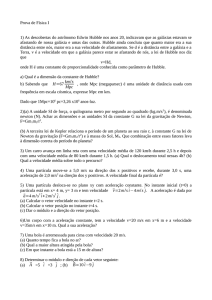
Figura 1.5
Exemplos de forças de contato e forças de
campo. (a) Uma bola de basquete repousa
numa superfície plana e dura. (b) Um livro
é empurrado sobre uma mesa. Em ambos
os exemplos, a força de campo é o peso W
do objeto, e as forças de contato são a força normal N, a força de atrito F e a força
P aplicada no livro. Na bola de basquete,
o contato ocorre em uma região muito pequena, e é aceitável idealizá-la como um
ponto. No livro, o contato ocorre em toda
a superfície da capa, o que não impede que
se modelem as forças de contato como forças concentradas agindo em um ponto.
Erros comuns
Peso e massa não são a mesma coisa Infelizmente, é comum as pessoas
se referirem ao peso usando unidades de massa. Por exemplo, quando
alguém diz “Eu peso 70 kg”, está na
verdade querendo dizer “Minha massa é 70 kg”. Neste livro, assim como
em toda a engenharia, precisamos
ser exatos com nossa nomenclatura.
Pesos e forças serão sempre apresentados usando unidades apropriadas de
força, e massas serão sempre apresentadas usando unidades apropriadas de massa.
Homogeneidade dimensional e conversão de unidades
Como todos sabem, o símbolo “” significa que o que está do lado esquerdo
é igual ao que está do lado direito. Então, para uma expressão estar correta,
ela deve estar tanto numérica quanto dimensionalmente correta. Normalmente,
isso significa que os lados esquerdo e direito têm o mesmo valor numérico e
as mesmas unidades.† Muitas vezes, as unidades são desprezados nos cálculos,
sendo incorretamente presumidas no final. Por isso, recomendamos que você
sempre utilize as unidades apropriadas em todas as equações. Tal prática ajuda
a evitar erros catastróficos e fornece uma verificação útil na solução, pois se for
encontrada uma equação dimensionalmente inconsistente, é porque um erro
certamente foi cometido.
Prefixos
Os prefixos são uma alternativa útil na notação científica para representar números muito grandes ou muito pequenos. Os prefixos mais comuns e um resumo das regras para seu uso são dados na Tabela 1.2.
* SI foi adotado como abreviação do francês Le Système International d’Unités.
†
Um exemplo simples de uma exceção é a equação 1000 mm 1 m. Tais equações desempenham um papel fundamental na realização de conversão de unidades.
_Livro_Plesha.indb 9
O
L
Informações úteis
Dimensões versus unidades Dimensões e unidades são coisas diferentes.
Dimensões são extensões mensuráveis de algum tipo, enquanto unidades
são usadas para medir uma dimensão.
Por exemplo, comprimento e tempo
são dimensões, e metro e segundo
são, respectivamente, unidades usadas para medir essas dimensões.
17/09/13 15:51
10
Mecânica para engenharia: estática
Regras para o uso de prefixos
1. Os prefixos, com poucas exceções, devem ser usados somente no numerador de combinações de unidades. Uma exceção comum é o kg, o qual
pode aparecer no numerador ou no denominador.
2. Deve-se usar um ponto ou traço para simbolizar a multiplicação de unidades. Por exemplo, N·m ou N-m.
3. A exponenciação aplica-se tanto às unidades quanto aos prefixos. Por
exemplo, mm2 (mm)2.
4. Quando o número de dígitos em ambos os lados de uma vírgula decimal
passa de 4, é comum agrupar os dígitos em grupos de 3, com os grupos separados por pontos ou pequenos espaços. Visto que muitos países
usam um ponto para representar uma vírgula decimal, o espaço às vezes
é preferível. Por exemplo, 1234,0 poderia ser escrito como tal, e 12345,0
deveria ser escrito como 12.345,0 ou 12 345,0.
Tabela 1.2 Prefixos comumente usados no sistema de unidades SI
Fator de multiplicação
1 000 000 000 000 000 000 000 000
1 000 000 000 000 000 000 000
1 000 000 000 000 000 000
1 000 000 000 000 000
1 000 000 000 000
1 000 000 000
1 000 000
1 000
100
10
0,1
0,01
0,001
0,000 001
0,000 000 001
0,000 000 000 001
0,000 000 000 000 001
0,000 000 000 000 000 001
0,000 000 000 000 000 000 001
0,000 000 000 000 000 000 000 001
24
10
1021
1018
1015
1012
109
106
103
102
101
10−1
10−2
10−3
10−6
10−9
10−12
10−15
10−18
10−21
10−24
Prefixo
Símbolo
yotta
zetta
exa
peta
tera
giga
mega
kilo
hecto
deka
deci
centi
milli
micro
nano
pico
femto
atto
zepto
yocto
Y
Z
E
P
T
G
M
k
h
da
d
c
m
μ
n
p
f
a
z
y
Enquanto os prefixos podem ser facilmente incorporados em uma expressão por
inspeção, as regras para a realização disso são idênticas àquelas para a realização de transformações de unidades, como mostrado nos exemplos desta seção.
definição de medida
em radiano
Figura 1.6
Definição de medida em radiano para ângulos.
_Livro_Plesha.indb 10
Medidas angulares
Os ângulos costumam ser medidos tanto em radianos (rad) quanto em graus
(°). A medida em radianos do ângulo θ mostrado na Fig. 1.6 é definida como
a razão entre a circunferência c de um arco circular e o raio r do arco. Deste
modo, como visto nos exemplos da Fig. 1.7, o ângulo de um quarto de um arco
circular é
rad (ou 1,571 rad), e para um arco circular completo o ângulo é
rad (ou 6,283 rad). A medida em graus escolhe arbitrariamente
17/09/13 15:51
Capítulo 1 Introdução
11
o ângulo de um arco circular completo como 360°, caso em que 1° é o ângulo
de um arco que é 1/360 partes de um círculo completo. Assim, a transformação
entre medidas em radianos e graus é
(1.4)
As transformações são realizadas usando os procedimentos descritos nesta seção. Por exemplo, para converter o ângulo θ 12° para radianos, usamos a Eq.
(1.4) para escrever
(1.5)
Radianos são uma medida de ângulo que surge naturalmente em matemática e
ciência, e a maioria das equações derivadas dos princípios fundamentais utiliza
a medida em radianos. Não obstante, a medida em graus tem apelo intuitivo e
é usada amplamente.
Quando escrevermos ângulos, sempre os registraremos como radianos ou
graus. Contudo, radianos e graus não são unidades como as citadas previamente e, embora talvez intrigante, ambas as medidas são adimensionais. Isso pode
. Com c e r
ser visto examinando a definição de radiano na Fig. 1.6:
tendo as mesmas unidades de comprimento, o ângulo θ é claramente adimensional. Deste modo, radianos e graus não são realmente unidades, mas declarações da convenção usada para medir ângulos. Não obstante, para propósitos
práticos, podemos considerá-los como unidades, e os transformaremos usando
nossos procedimentos habituais. Além disso, se derivarmos uma expressão que
esperávamos ser adimensional e descobrirmos que ela possui unidades em radianos ou graus, então não deveríamos necessariamente nos alarmar.
Figura 1.7
Exemplos de ângulos medidos em radianos.
O
Exatidão de cálculos
A exatidão das respostas obtidas para um problema específico é tão precisa
quanto a mais grosseira, ou menos exata, informação usada na análise. Por
exemplo, considere os números 1,23 e 45,67. Ao escrever esses números usando três ou quatro dígitos, respectivamente, a implicação é que são conhecidos
três e quatro dígitos significativos de exatidão. O produto exato desses números é 56,1741. Mas é errado concluir que o produto possui seis dígitos de exatidão. Além disso, é apropriado informar o produto com o mesmo número de
dígitos significativos como a parte de informação menos exata utilizada. Então,
iremos arredondar o produto exato para três dígitos significativos e informaremos a resposta como 56,2.
O uso do número de dígitos que implica precisão, como sugerido acima,
é ambíguo. Considere o número 6000; não está claro se este número possui um,
dois, três ou quatro dígitos significativos. Para incorporar a informação de exatidão nos números, é melhor usar a notação científica. Assim, por exemplo, se
o número 6000 possuísse três dígitos significativos, poderíamos escrever 6,00
× 103 com a convenção de que o número de dígitos usados indica a exatidão do
número. Neste livro, usaremos uma abordagem mais pragmática e geralmente
será assumido que os dados conhecidos terão três dígitos significativos. Quando
você está efetuando cálculos, uma boa prática é levar uns poucos dígitos extras
de exatidão para cálculos intermediários; e se uma calculadora ou computador
é usado, então certamente você pretenderá usar toda a precisão disponível. Não
obstante, as respostas finais devem ser interpretadas como tendo uma precisão
proporcional à precisão dos dados usados. O texto ao lado descreve a convenção
para a exatidão dos números usados na realização de cálculos neste livro.
_Livro_Plesha.indb 11
L
Informações úteis
Exatidão dos números em cálculos Neste livro, assumiremos de forma geral que os dados informados
nos problemas possuem três dígitos
significativos de exatidão. Quando os
cálculos são realizados, tal como nos
problemas de exemplo, todos os resultados intermediários são armazenados
na memória de uma calculadora ou
computador, usando a máxima precisão que essas máquinas oferecem.
Contudo, quando estes cálculos intermediários são informados no texto,
eles são arredondados para quatro dígitos significativos. As respostas finais
são normalmente informadas com três
dígitos significativos. Se você verificar
os cálculos usando os números arredondados que são informados, poderá
ocasionalmente encontrar resultados
um pouco diferentes dos mostrados.
17/09/13 15:51
12
Mecânica para engenharia: estática
EXEMPLO 1.1
Conversão de unidades
Converta a velocidade s 5,6 m/s para km/h.
SOLUÇÃO
Roteiro Começando com s = 5,6 m/s, multiplicaremos o lado direito desta expressão
por fatores de conversão apropriados para atingir a unidade de conversão desejada.
Equações governantes e cálculos A velocidade
s = 5,6 m/s
(1)
Para obter s em unidades km/h, realizamos as seguintes transformações na Eq. (1):
Erros comuns
Omitindo unidades em equações O
erro mais grave ao realizar conversões
de unidades (assim como quando escrevemos equações em geral) é omitir
as unidades nas equações. Embora
escrever unidades nas equações leve
algum tempo, isso ajudará a evitar erros que são consequência da falta desta prática.
_Livro_Plesha.indb 12
5,6
Discussão e verificação
20,16
(2)
Quando possível, as respostas devem ser conferidas para
verificar se são razoáveis.
17/09/13 15:51
Capítulo 1 Introdução
1.6
13
LEI DA GRAVITAÇÃO DE NEWTON
Como o peso produzido pela gravidade é algo onipresente, vale a pena examinar a origem dessas forças com atenção e compreender as limitações das
expressões comuns, tais como
, onde m é a massa de um objeto, g é a
aceleração da gravidade e W é o peso do objeto. Em 1666, Newton desenvolveu
sua lei da atração gravitacional universal conforme abaixo:
(1.6)
onde
m1, m2 massas das partículas 1 e 2
r distância entre as partículas
G constante gravitacional universal,
determinada como aproximadamente
66,74 × 10−12 m3/(kg·s2)
F força de atração entre duas partículas
Foi amplamente comentado que a inspiração de Newton para esta lei foi
o movimento de uma maçã caindo de uma árvore, mas ele também reconheceu
que a mesma lei deveria ser aplicada na atração mútua dos corpos celestes.
Embora Newton tenha postulado a lei em 1666, foi somente em 1687 que ele
publicou suas ideias em Princípios. Esse atraso se deveu, em parte, à necessidade de provar que os objetos, assim como a Terra (se assumida como esférica
e uniforme), poderiam ser tratados como um ponto com massa para efeitos
gravitacionais sobre as partículas vizinhas; e, para provar isso, ele desenvolveu
o cálculo.* A primeira medida precisa do G foi dada por Lorde Cavendish, em
1798, e este valor foi corrigido por meio de experimentos mais cuidadosos ao
longo dos dois últimos séculos, conduzindo ao valor relatado aqui. A lei da
atração gravitacional universal é um postulado, e, assim como as três leis do
movimento de Newton, devemos aceitar isso como uma regra que a natureza
segue sem uma prova fundamental de sua validade.
Para a grande maioria das aplicações na Terra, a Eq. (1.6) toma a forma
simples e conveniente
, como segue. Considera-se m1 na Eq. (1.6)
como a massa m de um objeto, e m2 como a massa da Terra (com um valor
aproximado mTerra 5,9736 × 1024 kg). Se o objeto está sobre ou perto da
superfície da Terra, então a sua posição r é aproximadamente a mesma que o
raio médio da Terra (com um valor aproximado de 6,371 × 106 m). A força
F na Eq. (1.6) é então chamada de peso W do objeto, e a Eq. (1.6) pode ser
reescrita como
Alerta de conceito
Força devido à gravidade A força devido à atração gravitacional entre dois
objetos é um vetor; portanto, ela tem
magnitude, direção e sentido. A equação (1.6) dá a magnitude, e a direção é
a de uma linha que conecta os centros
de gravidade dos dois objetos.
(1.7)
Da Eq. (1.7), vemos que g não é uma constante, pois depende do valor de r.
No entanto, para a maioria das aplicações onde os objetos estão próximos da
* O cálculo também foi desenvolvido independentemente por Gottfried Wilhelm Leibniz
(1646-1716), e ele e Newton tiveram uma longa disputa sobre quem era o verdadeiro autor.
Os registros históricos mostram que, embora Newton tenha sido o primeiro a descobrir o
cálculo (cerca de 10 anos antes de Leibniz), Leibniz foi o primeiro a publicar a sua descoberta (cerca de 15 anos antes de Newton). Em alguns aspectos, Leibniz ganhou, uma vez
que é a sua notação superior que usamos no cálculo atualmente.
_Livro_Plesha.indb 13
17/09/13 15:51
14
Mecânica para engenharia: estática
superfície da Terra, os efeitos de pequenas mudanças em r são desprezíveis, e
os valores comumente usados para a aceleração da gravidade são
(1.8)
Note que se os valores informados anteriormente para G, para a massa
da Terra e para o raio médio da Terra forem utilizados na Eq. (1.7), o valor
de g produzido será ligeiramente diferente de 9,81 m/s2. A diferença entre o
valor aceito de g e o valor calculado teoricamente fornecido pela Eq. (1.7) tem
diversas fontes, incluindo que a Terra não é perfeitamente esférica e não tem
distribuição uniforme de massa, além de os efeitos da aceleração centrípeta
devido à rotação da Terra não serem contabilizados. Devido a essas considerações, a aceleração real devido à gravidade é cerca de 0,3% menor no equador, e
0,3% maior nos polos, em relação aos números indicados na Eq. (1.8), que são
para uma latitude norte ou sul de 45° ao nível do mar. Além disso, pode haver
pequenas variações locais na aceleração da gravidade devido aos efeitos da
geologia. No entanto, neste livro, vamos utilizar os valores padrão de g dados
na Eq. (1.8).
O
L
Informações úteis
Centro de gravidade O centro de
gravidade é o ponto através do qual o
peso de um corpo, ou de um conjunto
de corpos, pode ser considerado como
atuante. Nas figuras, denotaremos o
centro de gravidade com o símbolo .
Para ilustrar, imagine um garçom em um
restaurante trazendo-lhe vinho e massa
em uma bandeja. Ele deve posicionar a
mão de forma que o peso combinado da
bandeja e de tudo que está sobre ela fique sobre seus dedos.
Relação entre peso específico e densidade
As densidades de alguns materiais comuns são apresentados na Tabela 1.3. A
densidade é definida como a massa de um volume unitário de material. Para o
aço, a densidade é ρ 7850 kg/m3. A densidade dos materiais também pode
ser descrita usando o peso específico (também conhecido como densidade de
peso e peso unitário). Essas medidas são relacionadas pela Eq. (1.7). Imagine
Tabela 1.3 Densidade de alguns materiais comuns. Exceto para água e
gelo, os números informados correspondem a 20ºC. Os dados
podem variar de acordo com a composição, elementos de liga,
temperatura, umidade da madeira, etc
Material
centro de gravidade
Os pesos do vinho (12 N), da massa
(10 N) e da bandeja (8 N) podem ser
analisado como uma única força de
30 N agindo no centro de gravidade
do conjunto de objetos. O centro de
gravidade e como ele é determinado
são minuciosamente discutidos no
Capítulo 7, onde é visto que os dois
sistemas de forças acima são sistemas
de forças equivalentes. Entretanto, um
conhecimento prático desta definição
será útil.
_Livro_Plesha.indb 14
ferro (puro)
ferro (fundido)
alumínio (puro)
alumínio (liga)
aço
aço inoxidável
bronze
titânio
borracha
náilon (fibra sintética)
concreto
rocha (granito seco)
osso cortical (adulto)
madeira (abeto seco Douglas)
água (fresca, 4°C, 1 atm)
gelo
combustível de jato JP-4
Densidade ρ
(kg/m3)
7860
7210 ± 240
2710
2710 ± 160
7850
8010
8610 ± 130
4480
1120 ± 160
1120
2400
2640
1900
510 ± 30
1000
920
770
17/09/13 15:51
Capítulo 1 Introdução
15
que um certo volume V de material tem peso (na Terra) W e massa m. Dividindo a Eq. (1.7) pelo volume V, temos
(1.9)
é a definição do peso específico , e
Nesta expressão,
da densidade ρ. Deste modo, a Eq. (1.9) transforma-se em
é a definição
(1.10)
_Livro_Plesha.indb 15
17/09/13 15:51
16
Mecânica para engenharia: estática
EXEMPLO 1.2
Peso e força de atração mútua
Duas bolas de boliche em repouso numa prateleira se tocam. As bolas têm 220 mm
de diâmetro e são feitas de plástico, com densidade ρA 1170 kg/m3 para a bola A
e ρB 980 kg/m3 para a bola B. Determine o peso de cada bola e a força de atração
mútua.
SOLUÇÃO
As forças a serem determinadas são mostradas na Fig. 2. Os pesos das bolas
A e B são forças (vetores) com magnitudes WA e WB, respectivamente, e estas forças
atuam na direção vertical para baixo. A força da atração mútua entre as duas bolas tem
magnitude F, com direções mostradas na Fig. 2. Observe que a terceira lei de Newton
requer que as forças de atração mútua entre as duas bolas tenham a mesma magnitude e
sentido oposto. Vamos supor que ambas as bolas são uniformes (isto é, a densidade é a
mesma por toda a bola) e vamos desprezar a presença dos furos para os dedos. Primeiro,
determinaremos a massa de cada bola. Depois, calcularemos o peso de cada bola, usando
e
, e, então, a força de atração mútua, usando a lei da atração
gravitacional de Newton.
Roteiro
Figura 1
A massa mA da bola A é o produto da densidade
e o volume da bola VA, e o mesmo para a bola B. Assim,
Equações governantes e cálculos
do material
Figura 2
O peso de cada bola e a força de atração
mútua são vetores com as direções mostradas.
Nota importante: As bolas de boliche
também estão sujeitas a outras forças que
não são mostradas (veja Informações úteis
abaixo).
O peso de cada bola é
A força de atração mútua é dada pela Eq. (1.6) (com os subscritos 1 e 2 substituídos por A e B) como
O
L
Informações úteis
Forças adicionais As bolas mostradas
na Fig. 2 estão sujeitas a forças adicionais que não são mostradas. Por exemplo, a prateleira exerce uma força em
cada bola, e provavelmente há forças
de contato entre as duas bolas onde
elas se tocam. Claramente, sem essas
forças adicionais, as bolas de boliche
não poderiam estar em equilíbrio estático. O Capítulo 3 irá discutir exaustivamente essas forças adicionais e como
elas podem ser determinadas.
_Livro_Plesha.indb 16
Na Eq. (5),
é a distância entre o centro de cada bola.
Discussão e verificação Como você deve ter suposto, a força de atração mútua entre
as duas bolas é muito pequena comparada ao peso das bolas (9 ordens de magnitude
menor). Ao desenvolver modelos para problemas de engenharia, a força de atração mútua geralmente será pequena se comparada com outras forças e, quando assim for, será
desprezada.
17/09/13 15:51
Capítulo 1 Introdução
1.7
17
FALHA
Dentre todos os objetivos que confrontam os engenheiros quando eles projetam
estruturas e máquinas, o mais importante é desenvolver projetos os mais seguros possíveis. Infelizmente, apesar de todos os esforços humanos, às vezes,
isso não é possível, e por razões que são quase sempre inesperadas. Quando
a falha ocorre, temos de aprender com ela para que nossos erros e/ou falta de
previsão não se repitam no futuro.* Nesta seção, alguns exemplos de falhas de
engenharia serão destacados.
• Ponte Tacoma Narrows Apenas quatro meses após a inauguração em
1940, a ponte suspensa Tacoma Narrows, em Washington, desabou violentamente devido às fortes vibrações produzidas por forças aerodinâmicas que não foram totalmente previstas e contabilizadas em seu projeto
(ver Fig. 1.8). Curiosamente, a ponte Deer Isle, na costa do Maine, um
tanto menor, era de construção semelhante. Ela foi inaugurada um ano
antes e também experimentou as vibrações produzidas pelo vento. No
entanto, seu projetista havia adicionado carenagens ao longo da ponte
para conferir a ela melhores propriedades aerodinâmicas, e uma amarração extra com cabos diagonais para propiciar maior rigidez. Essa ponte
é usada até hoje.†
• Ponte Escambia Bay Cinquenta e seis seções da ponte Interestadual
10 que cruza Escambia Bay em Pensacola, Flórida, foram desalojadas
devido ao Furacão Ivan em setembro de 2004, incluindo várias seções
que foram levadas completamente para dentro da água (ver Fig. 1.9).
Cada uma dessas seções pesava cerca de 220 toneladas. O Serviço Nacional de Meteorologia classifica a intensidade dos furacões por meio de
uma escala de 1 a 5. Quando o Ivan atingiu a ponte Escambia Bay, foi
classificado como um furacão da categoria 3 com ventos na faixa de 177208 km/h. Embora o Ivan não fosse um furacão violento de acordo com
essa escala, os danos causados à ponte Escambia Bay foram extremos.
• Falha do Airbus A300 Em 12 de novembro de 2001, poucos minutos
após a decolagem, o voo da American Airlines 587, um Airbus A300,
caiu em uma área residencial de Belle Harbor, New York, por causa do
estabilizador vertical que se separou da aeronave devido a uma falha
nos terminais de ligação entre o estabilizador e a fuselagem (ver Fig.
1.10). Todas as 260 pessoas a bordo e cinco pessoas em terra morreram.
A National Transportation Safety Board‡ (NTSB) investigou o acidente e
atribuiu a causa às elevadas cargas aerodinâmicas resultantes dos movimentos desnecessários e excessivos no pedal do leme, feitos pelo piloto
em reação à turbulência causada por outra aeronave. O programa de treinamento de pilotos da companhia aérea e o projeto do leme do avião também foram citados como fatores contribuintes. Entre as recomendações
* Para estudos de casos interessantes de falhas, ver H. Petroski, Design Paradigms: Case
Histories of Error and Judgments in Engineering, Cambridge University Press, New York,
1994.
†
Para leitura adicional, ver B. Moran (1999), “A Bridge That Didn’t Collapse”, Invention
and Technology, 15(2), pp. 10-18.
‡
A National Transportation Safety Board (NTSB) é uma agência federal independente
investida pelo Congresso para investigar todos os acidentes da aviação civil nos Estados
Unidos e acidentes significativos em outros tipos de transporte, incluindo ferrovias, rodovias, hidrovias e tubulares, e para a emissão de recomendações de segurança destinadas a
prevenir futuros acidentes. Embora a implementação das recomendações da NTSB não seja
obrigatória, mais de 80% têm sido adotadas.
_Livro_Plesha.indb 17
Figura 1.8
Falha na ponte Tacoma Narrows, em Tacoma, Washington, em 1940, por causa das
fortes vibrações produzidas por um vento
de 67 km/h.
Figura 1.9
Falha na ponte Escambia Bay, em Pensacola, Flórida, durante a passagem do furacão Ivan em setembro de 2004.
17/09/13 15:51
18
Mecânica para engenharia: estática
Figura 1.10
O estabilizador vertical de uma aeronave
A300 da Airbus separou-se durante o voo
e foi recuperada em Jamaica Bay, a cerca
de 1,6 km do local do acidente.
feitas pela NTSB, estava a modificação dos sistemas de controle do leme
para aumentar a proteção contra forças elevadas, devido a movimentos
perigosos no pedal aplicados em altas velocidades.
• Hotel Kansas City Hyatt Regency Em 17 de julho de 1981, duas passarelas suspensas no hotel Kansas City Hyatt Regency desmoronaram durante uma festa, matando 114 pessoas e ferindo gravemente muitas outras. O
desmoronamento ocorreu devido a uma falha nas conexões, como mostrado na Fig 1.11 (a). O projeto original das conexões, conforme a Fig 1.11
(b), foi alterado durante a construção do projeto, conforme mostrado na
Fig 1.11 (c), com a concordância de todas as partes envolvidas. Enquanto
o projeto original tinha condições suficientes para suportá-lo, o projeto
modificado era mais fácil de fabricar, caracterizando-se por barras mais
curtas que estavam prontamente disponíveis, e era bem mais simples do
que o projeto original, potencialmente confuso. No entanto, o projeto modificado nunca foi analisado para determinar a sua adequação.*
(a)
(b) projeto original
(c) como construído
Figura 1.11 (a) Falha em uma conexão de apoio de uma passarela no Kansas City
Hyatt Regency Hotel, onde uma haste de apoio foi deslocada para uma viga de seção
quadrada, causando o colapso da passarela. (b) O projeto original, que tinha resistência
suficiente. (c) O projeto modificado, que era mais fácil de construir.
Figura 1.12
Inspetores vistoriam os cinco andares que
desmoronaram em um estacionamento em
construção no Tropicana Casino and Resort, em Atlantic City, New Jersey, em 30
de outubro de 2003.
• Estacionamento do Tropicana Casino Em 30 de outubro de 2003, um
estacionamento de 10 andares em construção, no Tropicana Casino and
Resort, em Atlantic City, New Jersey, desmoronou, matando quatro trabalhadores e ferindo outros 21 (ver Fig. 1.12). A falha ocorreu enquanto
o concreto estava sendo despejado em uma das plataformas do piso superior. A Occupational Safety and Health Administration† (OSHA) investigou a falha e multou a empreiteira responsável pelo concreto pelo
desrespeito intencional das normas de segurança por falhas na elevação,
no suporte, na escora diagonal e por não manter uma estrutura que fosse
capaz de suportar as cargas laterais e verticais esperadas durante a construção. O projeto por si só era adequado, mas o projeto das estruturas
necessárias para a sua construção não. Observa-se que o concreto exige
um tempo após despejo (comumente 28 dias) para atingir a sua resistência final de projeto.
* Aspectos adicionais dessa falha são discutidos em H. Petroski, Design Paradigms: Case
Histories of Error and Judgments in Engineering, Cambridge University Press, New York,
1994.
† A missão e o poder regulatório da Occupational Safety and Health Administration
(OSHA) são descritos na p. 317.
_Livro_Plesha.indb 18
17/09/13 15:51
Capítulo 1 Introdução
1.8
19
REVISÃO DO CAPÍTULO
Definições, conceitos e equações importantes deste capítulo serão resumidos
aqui. Para equações e/ou conceitos que não estão claros, você deve verificar os
números da equação original citada para detalhes adicionais.
Um escalar é uma grandeza completamente caracterizada por um único número. Um vetor tem tamanho (ou magnitude) e direção.
Neste livro, os escalares são indicados por símbolos em itálico, como s, e
os vetores são indicados por uma seta colocada acima do símbolo do vetor,
como .
Escalares e vetores
Posição, velocidade e aceleração Posição, velocidade e aceleração são
grandezas vetoriais. Se indica a posição de uma partícula em relação a
uma posição, então a velocidade e a aceleração dessa partícula são definidas como
Quando
, a partícula está em equilíbrio estático, e pode tanto estar se
movendo com velocidade constante quanto permanecer estacionária no espaço.
Se
, então a partícula se moverá com velocidade e posição variando com
o tempo.
Leis do movimento As três leis do movimento de Newton são as seguintes:
Uma partícula permanece em repouso, ou continua a se mover
em linha reta com velocidade uniforme, se não houver força desbalanceada agindo sobre ela.
Primeira lei
A aceleração de uma partícula é proporcional à força resultante
que age sobre ela e ocorre na direção da força.
Segunda lei
Terceira lei As forças de ação e reação entre corpos que interagem são iguais
em magnitude, opostas em sentido e colineares.
Equilíbrio estático Na Eq. (1.3), se a força resultante agindo em uma partícula é zero, então a aceleração da partícula também é zero, e por isso ela pode
se mover com velocidade uniforme em uma linha reta, que pode ser zero ou
diferente de zero em valor. Assim, quando não há aceleração (isto é,
),
diz-se que a partícula está em equilíbrio estático.
_Livro_Plesha.indb 19
17/09/13 15:51
20
Mecânica para engenharia: estática
Lei da gravitação de Newton A lei de Newton da atração gravitacional uni-
versal é
13
onde
m1, m2 massas das partículas 1 e 2
r distância entre as partículas
G constante gravitacional universal, determinada como
aproximadamente 66,74 × 10−12 m3/ (kg.s2)
F força de atração entre duas partículas
Quando escrita para objetos em repouso na superfície da Terra ou perto dela,
essa lei toma a forma simples e útil
13
onde m é a massa de um objeto, g é a aceleração da gravidade (g 9,81 m/s2)
e W é o peso do objeto.
A densidade ρ de um material
é definida como a massa do material por unidade de volume. O peso específico
γ de um material (às vezes também chamado de densidade de peso ou peso
unitário) é definido como o peso do material na Terra por unidade de volume.
A relação entre eles é
Relação entre peso específico e densidade
15
Atenção para as unidades É fortemente recomendado que você sempre use
unidades apropriadas em todas as equações. Tal prática ajuda a evitar erros
catastróficos e possibilita uma verificação útil em uma solução, pois se uma
equação vier a ser dimensionalmente inconsistente, é porque certamente algum
erro foi cometido.
_Livro_Plesha.indb 20
17/09/13 15:51
Capítulo 1 Introdução
21
PROBLEMAS DE REVISÃO
Problema 1.1
(a) Considere uma situação em que a força F aplicada a uma partícula de massa m
é zero. Multiplique a forma escalar da Eq. (1.2), p. 7 (isto é, a = dv/dt), por dt
e integre ambos os lados para mostrar que a velocidade v (também um escalar) é
constante. Em seguida, use a forma escalar da Eq. (1.1), p. 7, para mostrar que a
posição r (escalar) é uma função linear do tempo.
(b) Repita a parte (a) quando a força aplicada à partícula é uma constante diferente de
zero, para mostrar que a velocidade e a posição são funções linear e quadrática do
tempo, respectivamente.
Problema 1.2
Use a Eq. (1.7), na p. 15, para calcular um valor teórico da aceleração devido à gravidade g, e compare esse valor com a aceleração real devido à gravidade nos polos da
Terra, que é cerca de 0,3% superior ao valor relatado na Eq. (1.8), p. 14. Comente sobre
a concordância.
Problema 1.3
Dois asteroides idênticos viajam lado a lado enquanto se tocam. Se os asteroides são
compostos de ferro puro homogêneo e são esféricos, qual o diâmetro em metros que
eles devem ter para que exista uma atração gravitacional mútua de 4,5 N?
Problema 1.4
A massa da Lua é aproximadamente 7,35 × 1022 kg e sua distância média até a Terra é
cerca de 3,80 × 108 km. Determine a força de atração gravitacional mútua em Newtons
entre a Terra e a Lua. Depois, discuta por que a Lua não colide com a Terra.
Problema 1.5
Se uma pessoa em pé na entrada do primeiro andar do Sears Tower, em Chicago, pesa
exatamente 68 kg, determine o peso dessa mesma pessoa no topo do prédio, a 442 m
acima da entrada do primeiro andar. Qual deve ser a altura do topo do prédio para que o
peso da pessoa seja 99% do valor na entrada do primeiro andar?
Problema 1.6
Uma Super Bola é uma bola de brinquedo feita de uma borracha sintética dura chamada
Zectron. Esse material tem coeficiente de restituição de forma tão elevado que, ao cair
de certa altura sobre uma superfície dura e fixa, rebota a uma parcela considerável de
sua altura original. Se a Super Bola tem 50 mm de diâmetro e a densidade do Zectron é
de aproximadamente 1500 kg/m3, determine o peso da Super Bola.
_Livro_Plesha.indb 21
17/09/13 15:51
22
Mecânica para engenharia: estática
Problema 1.7
Um disco de hóquei no gelo é um pequeno cilindro achatado de borracha vulcanizada
com 76 mm de diâmetro e 25 mm de espessura, com peso entre 156 e 170 kg. Calcule
o intervalo de densidades da borracha, em unidades SI convencionais, que permitirá
encontrar um disco nessas especificações.
Problema 1.8
Converta os ângulos dados para as unidades indicadas.
para rad.
(a)
para mrad.
(b)
rad para graus.
(c)
(d)
mrad para graus.
Problema 1.9
Muitos dos exemplos de falha discutidos na Seção 1.7 têm causas comuns, como as
cargas que não foram previstas, a superestimação da resistência dos materiais, o uso
imprevisto, etc. Identifique aqueles exemplos que têm causas comuns de falha e discuta
que causas são essas.
Nota: Problemas conceituais requerem explicações, não cálculos.
_Livro_Plesha.indb 22
17/09/13 15:51