INSTITUTO FEDERAL DE EDUCAÇÃO,
CIÊNCIA E TECNOLOGIA DE SÃO PAULO.
RELATÓRIO
Disciplina: Gravitação e Leis de Conservação Turma:
Z2
Professores: Osvaldo Canato Júnior
20/09/2015
Data de entrega:
Rodrigo Sponchiado
Nomes dos alunos
Prontuário
Camila de Oliveira Primo
1560875
Stephanie Katarinie Monteiro
1564161
Título:
Análise de Movimentos no Tracker
São Paulo - SP
2015
Sumário
Objetivo ............................................................... Error! Bookmark not defined.
Introdução Teórica .............................................. Error! Bookmark not defined.
Equipamentos .................................................. Error! Bookmark not defined.
Procedimeto........................................................................................................ 4
Dados Coletados: ................................................ Error! Bookmark not defined.
Análise................................................................................................................ 6
Queda livre...................................................................................................... 6
Lançamento oblíquo........................................................................................ 6
Plano inclinado................................................................................................ 6
Conclusão........................................................................................................... 7
Objetivo:
Encontrar o valor da aceleração gravitacional através do estudo dos movimentos de queda
livre, lançamento oblíquo e deslize no plano inclinado com a utilização do Tracker.
Introdução teórica:
Queda livre:
A queda livre é um tipo de movimento uniformemente variado
(MRUV), se tratando de um movimento acelerado. Nesse caso
particular do MRUV, o objeto que está suspenso em uma
determinada altura é solto tendo apenas a força peso agindo sobre o
mesmo.
Lançamento oblíquo: Nesse tipo de movimento o objeto se desloca pelo eixo x e pelo eixo y. O
movimento é uniforme, pois a aceleração é constante. Este é um caso particular da queda
livre.
Plano inclinado: O plano inclinado é um tipo de máquina simples. A aceleração encontrada
não será a mesma da gravidade, então, para encontrá-la serão utilizadas as relações
trigonométricas do triângulo retângulo.
Materiais utilizados:
Esferas
Massores
Plano inclinado
Trena
Régua
Câmera
Carrinho
Apoio para a câmera
Procedimento:
O procedimento para analisar os três tipos de movimento foram muito parecidos. Depois que
o lugar onde a filmagem seria feita foi definido, escolhemos algo que pudesse servir de
referencial de medida de espaço para analisar no Tracker.
Dados:
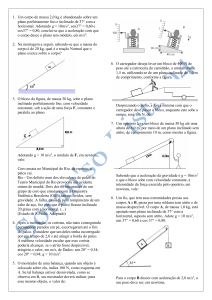
Queda livre A
9
8
7
6
Tempo
5
4
3
2
1
0
0
0.2
0.4
0.6
0.8
1
y=
Altura
-5.1667x2
1.2
+ 1.2426x + 7.5723
Função horária da posição: y = -5,1667t2 + 1,2426t + 7,5723
Função horária da velocidade: v = -10,3334t + 1,2426
Aceleração: 10,33 m/s2
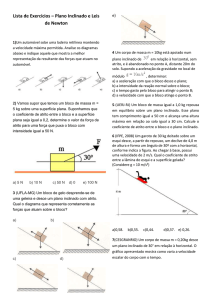
Queda Livre B
Queda Livre B
y = -4.2862x2 - 0.626x + 4.9567
6
5
4
3
2
1
0
0
0.2
0.4
0.6
0.8
Função horária da posição: y = -4,2862x2 - 0,626x + 4,9567
1
1.2
1.4
Função horária da velocidade: v = -8,5724x -0,626
Aceleração: 8,5724m/s2
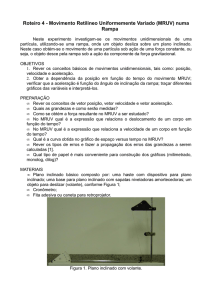
Plano Inclinado A
y = -0.1387x2 - 0.0574x - 0.0992
0.00
0.00
0.50
1.00
Plano inclinado A
1.50
2.00
2.50
3.00
3.50
4.00
-0.50
-1.00
-1.50
-2.00
Função horária da posição: y = -0,1387x² - 0,0574x - 0,0992
Função horária da velocidade: v= -0,2774x -0,0574
Aceleração: -0,2774 m/s²
Plano inclinado B
Plano inclinado B
y = -0.141x2 - 0.0807x - 0.1152
0.00
0.00
-0.50
-1.00
-1.50
-2.00
-2.50
0.50
1.00
1.50
2.00
2.50
3.00
3.50
4.00
Função horária da posição: y = -0,141x2 - 0,0807x - 0,1152
Função horária da velocidade: v = -0,282x -0,0807
Aceleração: -0,2820 m/s²
Lançamento Oblíquo:
Lançamento Oblíquo
y = -6.5074x2 + 7.9395x - 0.083
3
2.5
2
Tempo (s)
1.5
1
0.5
0
-0.5 0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
-1
-1.5
-2
-2.5
Posição (m)
Função horária da posição: y = -6,5074x2 + 7,9395x - 0,083
Função horária da velocidade: v = 7.9395 -13.0148x
Aceleração: 13.0148m/s2
Anáalise:
1. Queda livre
Obtivemos o gráfico a partir da utilização do Tracker, depois de acharmos a equação,
derivamos duas vezes encontrando a velocidade em f’(x) e a aceleração em f’’(x).
No movimento de queda livre a aceleração coincide com a aceleração da gravidade se
aproximando razoavelmente do valor esperado de 9,80m/s2 com uma diferença de
0,53m/s2 na queda livre A e 1,23m/s2 na queda livre B .
2. Lançamento oblíquo
Sendo o lançamento oblíquo um caso particular da queda livre, a aceleração
encontrada por meio das derivadas é igual ao valor da gravidade. O resultado
encontrado foi 13.0148m/s2, com diferença grande de 3,21m/s2 do valor esperado.
Ainda sim, comparado com o método do plano inclinado, é um resultado
consideravelmente próximo.
3. Plano inclinado
Para obtermos o valor da gravidade através do plano inclinado utilizamos da seguinte
equação:
𝑃. 𝑠𝑒𝑛𝑎 = 𝑚. 𝑎
𝑚. 𝑔. 𝑠𝑒𝑛𝑎 = 𝑚. 𝑎
|𝑎|
|𝑔| =
sen 𝑎
P = peso
m = massa
g = gravidade
𝑎 = aceleração
sen 𝑎 = seno do ângulo
sen 𝑎 =
0,12𝑚
2𝑚
= 0,06
Logo, para o plano inclinado A:
|𝑔| =
|−0,2774|
= 4.6233
0,06
Para o plano inclinado B:
|𝑔| =
|−0,2820 |
0,06
= 4.7000
O valor da gravidade encontrado foi muito distante do valor esperado da gravidade.
No plano inclinado A tivemos uma discrepância de aproximadamente 5,18m/s2 e no
plano inclinado B de 5,10 m/s2. Os motivos dessa distinção podem ser o atrito, não tão
desprezível, e a quantidade maior de variáveis no problema que geram mais
incertezas.
Conclusão: Dependendo das situações, o programa Tracker pode ser extremamente
eficaz para encontrar valores muito aproximados do valor real. Porém, quanto mais
variáveis, mais incertezas serão ocasionadas, podendo gerar valores muito
discrepantes do valor real.