Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
MODELAGEM E ANÁLISE DINÂMICA DE INVERSOR FONTE DE TENSÃO E
CONTROLADORES DE DROOP
JAKSON P. BONALDO
Departamento de Engenharia Eletrônica, Universidade Tecnológica Federal do Paraná
Via Rosalina Maria dos Santos, 1233, Campo Mourão, PR, Brasil, 87301-899
E-mail: [email protected]
JOSÉ ANTENOR POMILIO
Faculdade de Engenharia Elétrica e de Computação, Universidade Estadual de Campinas
Av. Albert Einstein, 400, Campinas, SP, Brasil, 13083-852
E-mail: [email protected]
HELMO K. M. PAREDES
Grupo de Automação e Integração de Sistemas, UNESP - Univ Estadual Paulista
Av. Três de Março, 511, Sorocaba, SP, Brasil, 18087-180
E-mails: [email protected]
Abstract
This work deals with voltage source inverters used as interface between local power sources and the grid utility. It is
modelled and analysed the current and voltage control loops of the voltage source inverter, which use a LC structure as filter
element. The droop controllers are analysed in a dynamic point o view concerning its stability and dynamic behaviour. Simulations are carried out for modelling validation.
Keywords
Distributed generation, droop, converter modelling, load sharing, power electronics, voltage source inverter
Resumo
Este trabalho trata de inversores fonte de tensão empregados em geração distribuída para conectar fontes locais de
energia na rede elétrica. São modeladas e projetadas as malhas de controle de corrente e tensão de um inversor com filtro LC na
saída e realizada a análise de estabilidade. A partir do modelo do inversor, o comportamento dinâmico dos controladores de droop é modelado e analisado. Simulações são realizadas para validar os conceitos apresentados, considerando a utilização de um
único inversor e a utilização de dois inversores em paralelo.
Palavras-chave
Geração distribuída, droop, eletrônica de potência, inversor fonte de tensão, modelagem de conversores..
operação de um único inversor operando nos modos
ilhado e conectado a rede. O segundo sistema é composto por dois inversores operando em paralelo, onde
também são considerados os dois modos de operação.
1 Introdução
Inversores fonte de tensão são largamente utilizados para conexão de fontes locais de energia, renováveis ou não, na rede elétrica. Em uma microrede
estes inversores devem ser capazes de operar em
paralelo de modo a conectar as fontes de energia, que
podem estar distribuídas ao longo da rede. Uma forma de alcançar a operação em paralelo de inversores
sem a necessidade de comunicação entre eles é a
utilização de controlador com droop para gerar a
referência de tensão que deve ser sintetizada por cada
um dos inversores. Esta técnica permite transições
suaves entre os modos de operação conectada e ilhada (Shang-Hung, 2011).
Este trabalho tem o objetivo de modelar e analisar a
resposta dinâmica, bem como a estabilidade, do inversor e dos controladores de droop, necessários para
possibilitar a interconexão das fontes locais de energia. Na análise dos controladores de droop é incluído
o modelo equivalente do inversor, o qual é obtido por
meio da modelagem e análise das malhas de controle
de corrente e tensão (Guan Yajuan, 2010).
Para demonstrar a validade da análise realizada, são
simulados dois sistemas. No primeiro é analisada a
2 Modelagem do Inversor Controlado em Tensão
2.1 Modelagem do Inversor
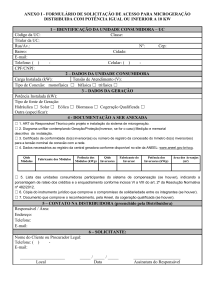
O circuito do inversor de tensão é mostrado na
Figura 1.a. Neste trabalho, tal estrutura é denominada
CEP (Conversor Eletrônico de Potência). A representação do CEP por blocos funcionais é mostrada na
Figura 1.b. de onde pode ser obtida a relação da
corrente de saída, pelo indutor, em função da tensão
sintetizada pelo inversor, conforme (1).
•
•
•
•
•
4256
: Ganho estático do inversor (dado pela
tensão no barramento, );
: Controlador de corrente;
: Ganho do sensor de corrente;
: Ganho do sensor de tensão;
s
: Controlador de tensão;
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1 + =
+ + Lf
VCC
2.2 Projeto dos Controladores
(1)
Os principais parâmetros do inversor, projetado
conforme metodologia descrita por (Pottker, 2004),
são mostrados na Tabela 1. Os controladores de tensão e corrente foram projetados considerando o pior
caso, que ocorre quando o inversor opera sem carga.
Nesta situação o amortecimento do sistema é mínimo
e, portanto, se o controlador projetado for capaz de
garantir a estabilidade para o inversor sem carga,
certamente o sistema será estável na condição de
carga nominal (Poh Chiang, 2005).
IL
CCC
Cf Ro
Vinv
Vo
a)
Vo
+
-
Cv
Iref +
-
Ci
VCC
-+
Vref
IL
Vo
Vinv
Ksi
Tabela 1 - Parâmetros do inversor
Parâmetro
Tensão nominal da rede, +
Frequência nominal da rede ,
Indutância do filtro LC, Resistência série equivalente de do indutor, Capacitância do filtro LC, Resistência da carga
Tensão do barramento CC, Capacitância de filtro do barramento CC, Ksv
b)
Figura 1 – Modelo do inversor de tensão: a) Circuito do inversor;
b) diagrama de blocos do inversor incluindo as malhas de controle
da tensão e da corrente.
A função de transferência da tensão de saída pela
corrente do indutor é dada por (2).
=
(2)
1 + Valor
220V
60Hz
1mH
100mΩ
40uF
16Ω
450V
1mF
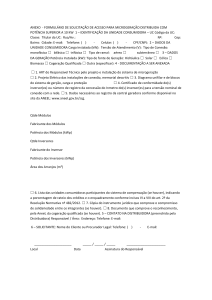
O controlador de corrente do tipo proporcional integral, (8), é projetado a partir de (3), visando garantir
margem de fase de 45° e banda passante de 1800 Hz.
A Figura 2 mostra uma comparação entre a função de
transferência em malha aberta da corrente sem compensação e com compensação utilizando C. s
.
0
(8)
= / +
A função de transferência de malha aberta do controle da corrente é dada por (3).
1 + (3)
= + + A função de transferência de malha fechada que
relaciona a referência de corrente I ! com a corrente
efetivamente obtida pelo indutor é dada por (4).
/
" =
=
(4)
#$ 1/ + A partir da função de transferência da corrente em
malha fechada, (5), é obtida a função de transferência
em malha aberta da tensão, (6), e, consequentemente,
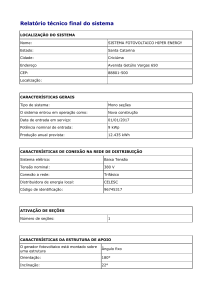
a função de malha fechada (7), a qual é mostrada na
Figura 3. O controlador , mostrado em (9), é do
tipo proporcional ressonante. A margem de fase do
sistema de controle da tensão é 65° e a largura de
banda é 300 Hz. Os parâmetros dos controladores de
corrente e tensão estão resumidos na Tabela 1Tabela
2..
223 0 = / + (9)
+ 223 + 2
Se a referência de corrente (I !) for normalizada,
então o ganho estático da função 4
pode ser dado
por (5) (Matavelli, 2006).
1
" '|)* =
(5)
Já o controle da tensão de saída é analisado utilizando a função de transferência de malha aberta (6). A
função de transferência em malha fechada do controle de corrente, (5), está no caminho direto da realimentação de tensão, e por isso deve ser considerada
na obtenção de (6).
= " (6)
+ 1
Tabela 2 - Parâmetros dos controladores
Parâmetro
Valor
Ganho proporcional controlador
1
de corrente, /
Ganho integral controlador
4000
de corrente, 0
Ganho proporcional controlador
1
de tensão, /
Ganho integral controlador de tensão, 0
100
Largura do pico ressonante do controlador
6,28 rad/s
resonante de tensão, 23
Frequência de sintonia do
377 rad/s
controlador resonante, 23
Assim, a função de transferência de malha fechada
do controle de tensão é obtida conforme (7).
/
(7)
" =
1/ + 4257
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
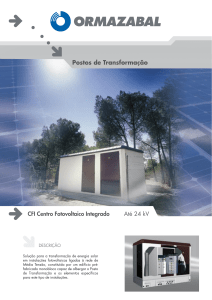
A Figura 5.a mostra o conceito clássico de droop
aplicado ao controle da frequência, enquanto a Figura 5.b traz o controle da tensão do inversor. V0 e F0
representam os valores nominais de tensão e frequências do inversor, enquanto P0 e Q0 representam
as potências ativa e reativas de referência, isto é, a
quantidade de potência que se deseja injetar na rede.
Os coeficientes k ! e k > determinam a inclinação das
retas de droop. Conforme (12), o droop da frequência
pela potência ativa, f-P, determina a frequência da
onda de tensão produzida pelo inversor considerando
o nível de potência entregue pelo conversor. Assim,
se a carga aumenta a frequência diminui. O mesmo
ocorre com o droop V-Q, pois, conforme (13), se a
potência reativa entregue pelo inversor aumenta, a
amplitude da tensão de saída sofre um decréscimo
(Jenkins, 2004).
Figura 2 - Função de transferência em malha aberta do controle de
corrente, antes e depois da compensação.
finv
Vinv
F0
V0
kV
kf
P0
a)
P
Q0
b)
Q
Figura 5 - Conceito de droop aplicado para gerar as referências de
tensão e frequência de saída de um conversor.
Figura 3 - Função de transferência em malha aberta do controle de
tensão, antes e depois da compensação.
Com base em (14) observa-se que controlando a
frequência da tensão gerada, (f.@A ), controla-se o
ângulo de potência, (δ), e consequentemente a potência ativa.
B = B* + C 4* − 4 (12)
3 Análise de Estabilidade da Operação com
Droop
= * + CD 5* − 5 A análise de estabilidade é realizada conforme a
metodologia mostrada em (Santos Filho, 2009) e
aplicada conforme (Ming Hua, 2012). Porém, neste
trabalho, a análise considera que o inversor está acoplado à rede por uma impedância predominantemente indutiva. Na prática, esta condição é alcançada
pela adição do indutor de / , conforme Figura 4.
Assim, as equações de potência ativa (4) e reativa
(5) considerando acoplamento indutivo são o ponto
de partida para esta analise.
/
(10)
4=
789
6
− / ;<9
5=
(11)
6
Vg
Rg
Lg
9 = E ΔB GH
(14)
Assim, a aplicação do método de droop imita o comportamento de uma máquina síncrona, a qual apresenta uma impedância série, predominantemente
indutiva, que produz uma queda de tensão que é
proporcional à potência entregue pela máquina. A
frequência da tensão gerada pela máquina síncrona
diminui se a carga aumenta e se nenhuma atitude é
tomada para corrigir este desvio.
3.1 Analise de Pequenos Sinais
ChCEP
Chg
(13)
O modelo de pequenos sinais para os controladores de droop é obtido pela injeção de pequenas perturbações, (15) e (16), nas equações das potências
ativa (10) e reativa (11).
(15)
= I + J
̅
L
(16)
9 = 9+9
PAC
Carga
O símbolo M indica variável em regime permanente
e N indica perturbação. A equação (17) é obtida pela
substituição de (16) em (10).
CEP
Figura 4 - Inversor conectado à rede elétrica.
4258
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
4 = 4I + 4J =
I + J /
789̅ + 9L 6
C/ + C0
23
VZ
[ 4J
9L = −U
+ 23 (17)
A equação da potência ativa devido a pequenas perturbações é linearizada considerando que cosδJ ≈ 1
e sinδJ ≈ δJ, resultando em (18).
I /
/
4J = 9L
;<9̅ + J
789̅ (18)
6
6
Substituindo a equação da potência para pequenos
sinais, (18), em (24), tem-se (25).
9L = − U
Da mesma forma, a equação de pequenos sinais para
a potência reativa é obtida, substituindo (15) em (11),
e realizando a análise de pequenos sinais com
cosδJ ≈ 1 e sinδJ ≈ δJ, tem-se (19).
2I J I / 9L 789̅ 5J =
+
6
6
(19)
J / ;<9̅ −
6
(25)
A análise realizada na subseção anterior é estendida, nesta subseção considerando a relação entre a
tensão do inversor e a potência reativa. Assim , partindo de (13) e considerando o efeito do filtro utilizado no cálculo da potência reativa, tem-se (26).
ω_
[ 5* − 5 = * + CD Z
(26)
s + ω_
Da análise de pequenos sinais, substituindo Q.@A =
N .@A + Q
M .@A , V.@A = V
M.@A + V
N.@A em (26) e desconsiQ
derando os valores de referência, tem-se (27).
23
[ 5J
J = −CD Z
(27)
+ 23 A equação de droop, (12), pode ser combinada
com (14) resultando em (20) que relaciona a potência
ativa e o coeficiente de droop k ! com o angulo δ
Da transformada de Laplace, tem-se (21).
1
9 = 9* − C 4* − 4 C/ + C0
23
I /
VZ
[ \9L
;<9 ̅
+ 23
6
/
+ J
789̅ ]
6
3.3 Equação Característica Devido a Tensão 3.2 Equação Característica Devido a Fase 9
9 = E B* + C 4* − 4 GH
(24)
(20)
Portanto, substituindo a equação da potência reativa
para pequenos sinais (19) em (27), tem-se (28).
(21)
3.4 Consideração sobre a Dinâmica Introduzida
pelo Inversor
Para se obter uma resposta dinâmica melhor de δ
pode-se substituir o integrador com ganho k ! por um
controlador de qualquer ordem, podendo ser utilizado
um controlador PI. Assim, a equação da fase é dada
por (22).
C/ + C0
V 4* − 4 9 = 9* − U
(22)
O cálculo da potência ativa é realizado pela multiplicação dos sinais de tensão e corrente seguido por
uma filtragem do tipo passa-baixas. O mesmo procedimento é utilizado no cálculo da potência reativa,
porém, utilizado um sinal de tensão defasado 90°.
Para atenuar a oscilação presente na potência calculada, o filtro passa-baixas deve apresentar frequência
de corte no mínimo 10 vezes menor que a frequência
do sinal resultante do produto de tensão por corrente.
Como o sistema elétrico apresenta frequência nominal de 60 Hz, então a frequência oscilatória presente
na potência calculada é de 120 Hz. É usado um filtro
passa-baixas com frequência de corte f_ = 12Hz.
Assim, a frequência de corte do filtro (12Hz) é muito
menor que a banda passante do inversor (300 Hz).
Pode-se então desconsiderar a dinâmica do inversor e
considerar apenas a banda passante do filtro na análise do sistema de droop.
Onde δ* é a referência de fase e P* é a referência de
potência ativa, as quais, por simplicidade, podem ser
pré-ajustadas em zero. Se o ganho K !Y for nulo, (22)
toma exatamente a forma de (21), isto é, a equação
tradicional de droop P − f. Assim, realizando uma
análise de pequenos sinais, substituindo (15) e (16)
em (22), obtém-se (23).
C/ + C0
V 4J
9L = −U
(23)
O efeito causado pelo atraso no cálculo da potência
ativa pode ser incluído no modelo pela introdução de
um filtro passa-baixas, resultando em (24).
CD 23 I / sin9̅
J = −9L
6 + 23 + 2CD 23 I − CD 23 / cos9̅ C/ + C0
I /
CD 23 I /
sin 9̅
V \9L
e
0 = 9L + 23 U cos9̅ − 9L + 23
6
6 + 23 + 2CD 23 I 6 − CD 23 / 6 cos9̅ 4259
(28)
(29)
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
controlador de droop toma como entradas as potências ativa e reativa de referência, 4 e 5 ; a frequência e a tensão que se deseja, geralmente configuradas
com os valores nominais da rede; os coeficientes das
retas de droop / e D ; e por fim, os valores medidos das potências ativa e reativa na saída do conversor de potência. Existem três modos de operação
possíveis, os quais são analisados a seguir.
3.5 Equação Característica Geral de Droop
A equação característica geral de droop é obtida
pela substituição de (28) em (25), resultando em
(29).
Logo, a equação característica é formada pela soma
do numerador com o denominador de (29), resultando em uma equação de terceira ordem, conforme
(30), cujos coeficientes são dados por (31), (32) e
(33).
(30)
f + g + h + ; = 0
Onde:
23
i26 + 2CD 6I − CD / 6;<9 ̅
6
+ C/ I j33 6;<9̅k
23 C/ /
h=
\2CD ;<9̅
6
− CD / ;< 9̅ − CD / 78 9̅ + 6;<9 ̅
C0 6;<9 ̅
2CD 6
+
+ 23 C/
23 C/ /
CD 6;<9̅
6
e
−
+
C/ C/ /
C0 CD I / 23
;=
l2I ;<9̅
6
− / ;< 9̅ 6
− / 78 9̅ + ;<9 ̅]
CD
g=
δg
+-
PI sinc_f
δCEP
fo
Vo
Po
Qo
P
Q
(31)
finv
Droop |Vinv|
Qo
+-
δ
1 S1
2
2 S3
1
1 S2
2
Vref
|Vinv| sin(δ)
PI Q
Q
(32)
VCEP
+-
Psinc_v
Vg
Figura 7 - Topologia de droop incluindo etapas de sincronismo
com a rede.
(33)
4.1 Tipos de Operação
Operação conectado a rede: Neste modo de operação, a tensão de referência #$ sintetizada pelo CEP
é gerada a partir do controlador de droop B − 4.
Como saída do controlador de droop se obtém a
frequência B , que é integrada para produzir a referência de fase. A chave Sf é configurada na posição
1. A referência de amplitude | | é obtida de modo
a garantir que o CEP disponibilize a potência reativa
de referência 5 . Para isto é utilizado o controlador
proporcional integral 4t que aplica a referência de
amplitude de tensão ao oscilador através da configuração da chave uv na posição 2 e da chave u na
posição 1.
3.6 Análise de Estabilidade
A Figura 6 mostra os pólos da equação características, mantidos os valores de C/ e CD e variando
valor de C0 . Com o incremento no valor de C0 os
pólos se movem do eixo real na direção do eixo imaginário, tornando o sistema menos amortecido. De
qualquer forma, o sistema é estável para qualquer
valor de C0 .
Operação ilhada: Na operação ilhada, tanto a referência de fase quanto a referência de amplitude são
geradas pelo controlador de droop. Assim, o CEP
comporta-se como uma fonte de tensão, suprindo à
carga a potência ativa e reativa necessárias. Neste
modo, as chaves uv , u e uf estão na posição 1.
Sincronização: Quando as chaves u e uf estão na
posição 2, as referências de fase e amplitude são
obtidas da saída dos controlador 43_ e 43_ ,
respectivamente. O controlador 43_ faz com que
a frequência e a fase da tensão do CEP se iguale a
tensão da rede. Para tal, são monitorados, os ângulos
da tensão do CEP (9x/ ) e da tensão da rede (9+ ).
Tais ângulos são obtidos pela implementação de
PLLs (Phase Locked Loops), conforme (Marafão,
2004). De modo similar, o controlador 43_ torna
a amplitude da tensão na saída do CEP igual à amplitude da tensão da rede.
Figura 6 - Variação de C0 variando de 10mn a 10mf com C/ = 3 ⋅
10mq e CD = 3 ⋅ 10mr.
4. Topologia de Droop Incluindo Etapas de
Sincronismo
A topologia do sistema de droop, incluindo as
etapas de sincronismo, é mostrada na Figura 7. O
4260
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
estabilidade é realizada através da Figura 9 que mostra o lugar das raízes do controlador de droop.
4.2 Funcionamento do Sistema de Sincronismo
O modo de sincronismo, mostrado na Figura 7, é
ativado apenas quando o conversor estiver ilhado e
se desejar voltar ao modo conectado. O modo sincronismo pode ser iniciado automaticamente se a tensão
e a frequência da rede retornarem para valores dentro
de limites aceitáveis. A configuração mostrada na
Figura 4 é utilizada para demonstrar a operação do
sistema de sincronismo. Para simplificar a simulação,
não é utilizado um algoritmo de detecção de ilhamento. O sistema é considerado ilhado assim que a
chave ℎx/ é aberta.
Uma falha na rede elétrica é simulada pela abertura
da chave Ch{, desconectado a rede do PAC. Assim
que o ilhamento é detectado, a chave Ch|}Y é aberta,
desconectando o inversor do PAC, e o modo de operação do controlador de droop da Figura 7 é ajustado
para o modo ilhado e a carga local é alimentada pelo
inversor. Quando a rede é normalizada, o que é simulado pelo fechamento da chave Ch{, dá-se início à
sincronização da tensão do inversor com a tensão da
rede ao configurar S e Sf na posição 2. Quando os
valores de frequência, fase e amplitude da tensão do
inversor estiverem próximos aos valores da tensão da
rede, a chave Ch|}Y é fechada, reconectando o inversor à rede elétrica. Neste instante, o controlador de
droop da Figura 7 deve alterar as chaves S e Sf para
a posição 1 e Sv para posição 2.
A Figura 8 ilustra as etapas de operação. Nota-se que
durante o período de sincronismo a potência suprida
à carga sofre um leve aumento. Isto é devido à impedância constante da carga e ao aumento da amplitude
da tensão gerada pelo CEP.
Tabela 3- Parâmetros utilizados na simulação do inversor operando com droop
Parâmetros
Valores
Tensão da rede
+ = 220/60
Indutância da fonte Renovável
3j = 2
+ = 2
Indutância da rede
Resistência da rede
+ = 0
Carga linear
= 9,8 + 7,7
C0 = 0.0001
Coeficientes de Droop
C/ = 0
CD = 0.0001
5* = 2C
4* = 4C
PI Potência Reativa
/ = 0.001
(Conectado a Rede)
= 0.01
/ = 4
PI Re-sincronismo Fase
= 0.5
/ = 0.5
PI Re-sincronismo Tensão
= 0.05
Figura 9 - Root Locus do regulador de droop usando os parâmetros
da Tabela 3.
A Figura 10 traz os resultados da simulação do comportamento dinâmico do sistema. Inicialmente, para
t<1s o inversor está conectado à rede, injetando os
valores nominais de potência ativa e reativa. Em t=1s
o inversor é desconectado da rede e em t=1,25s é
detectado o ilhamento. A amplitude e a frequência da
tensão de saída são reajustadas pelo regulador com
droop, atendendo à demanda da carga por potência
ativa e reativa. Em t=2s a rede torna-se novamente
disponível, sendo iniciado o processo de sincronismo
do inversor com a rede. Em t=3s o inversor é reconectado à rede, voltando a injetar os valores nominais
de potência.
Conforme Figura 10, a tensão no ponto de acoplamento / é menor que a tensão nominal da rede,
que seria de 220V. Isto se deve à queda de tensão
sobre a impedância da rede (+ e + ) e devido à
queda de tensão na indutância de acoplamento do
inversor com a rede (j3 ).
A tensão no PAC poderia ser ajustada por meio de
uma malha de controle secundária, externa ao controle por droop − 5. A frequência também pode ser
ajustada para um nível mais próximo da frequência
nominal, por meio de uma malha de controle secun-
Figura 8 - Sincronização do PEC com a rede elétrica.
5 Simulações
5.1 Simulação de um Único Inversor
Nesta seção, o CEP da Figura 4 e o controlador
de droop da Figura 7 são simulados utilizando os
parâmetros mostrados na Tabela 3. A análise de
4261
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
dária que reajusta a referência de potência ativa,
utilizada no controlador primário de droop B − 4.
Vg
VPAC
finv
Vinv
kV2
kfI2
VCEP
V01
V02
F01
F02
kfI1
Pg
PCARGA
PCEP
Qg
QCARGA
QCEP
P01
a)
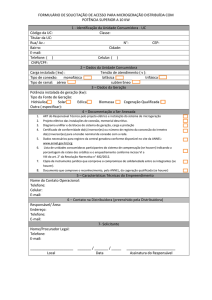
5.2 Aplicação de Droop no Paralelismo de Inversores Fonte de Tensão
Nesta simulação são utilizados dois inversores,
isto é CEPs, conectados ao ponto de acoplamento,
compartilhando uma carga comum com a rede. A
cada um dos inversores está associada uma carga
local. A potência total demandada pelas cargas deve
ser igual a soma das potências entregues pelos
inversores durante a operação ilhada, conforme (34).
(34)
4 = ∑ 4
Chg
Parâmetros
Tensão da rede
Impedância da rede
Carga Linear Comum
Carga Linear do CEP 1
Carga Linear do CEP 2
CEP 1
Rl1 Lg1
PAC
Ch1
Ch2
CEP 2
Carga
CEP1
Q02
Q
Tabela 4 - Parâmetros utilizados na simulação da Figura 11.
Rl2 Ll2
R g Lg
Q01
b)
A Tabela 4 mostra os parâmetros utilizados nas simulações do sistema da Figura 11. A Figura 13 mostra as correntes na rede e nos inversores. A Figura 14
mostra as potências ativa e reativa na rede e nos
inversores. No intervalo H < 0,6 as chaves estão
todas fechadas, isto é, ℎ+ . = ℎ1 = ℎ2 = 1 e os
inversores estão suprindo potência a suas cargas
locais e compartilhando a carga comum com a rede.
Em H = 0,6 ocorre o ilhamento, simulado pela
abertura da chave ℎ+ . Assim que o ilhamento é
detectado, as chaves ℎ1 e ℎ2 são abertas e os
inversores suprem energia somente para suas cargas
locais.
Figura 10 - Simulação de um inversor utilizando controle por
droop nos modos de operação conectada e ilhada.
Vg
P02
Figura 12 - Retas de droop para dois inversores com capacidades
distintas.
FCEP
)v
kV1
P
Carga
1
Carga
2
CEP2
Valores
+ = 220/60
+ = 2, + = 0,2
v = 2 , v = 0,1
= 0,5 , = 0,1
3jv = 2, 3jv = 0,1
3j = 2, 3j = 0,2
= 9.7993 + 7,6913
v = 15 + 13,2
v = 15 + 13,2
5 = 2C
4* = 4C
C/ = 0,0001
CD = 0,0001
5 = 2C
4* = 3C
C/ = 0,0001
CD = 0,0001
Em H = 1 a rede torna-se disponível novamente,
suprindo toda a energia demandada pela carga comum, pois os inversores estão desconectados. Em
H = 1,25 o inversor 1 termina o processo de sincronismo e é reconectado ao PAC. A corrente por este
inversor aumenta, pois o excedente de energia disponível da fonte local que não é consumida pela carga
local é injetada no PAC. Nota-se que a corrente pela
rede diminui, pois, a carga local está compartilhada
entre a rede e o inversor 1. Em H = 1,75 o inversor
2 é reconectado ao PAC, levando a um aumento da
potência injetada na rede. Durante este intervalo, a
somada das potências do inversor 1 e do inversor 2
injetadas no PAC é maior que a potência demandada
pelas cargas locais e pela carga comum. Logo, o
excedente é injetado na rede, o que se observa pela
inversão do sinal da potência pela rede (4 ).
Figura 11 - Operação de inversores em paralelo injetando energia
oriunda das fontes locais.
Assim, o método de droop surge como uma alternativa interessante para a operação autônoma de inversores fonte de tensão conectados em paralelo. A frequência e a amplitude da tensão gerada pelos conversores dependem do nível de potência entregue por
cada um dos conversores. Se os conversores forem
configurados seguindo as relações (35) e (36), todos
operarão com tensão e frequência iguais, conforme
mostrado na Figura 12.
Não é necessário que os conversores sejam iguais,
isto é, podem apresentar capacidades diferentes,
desde que as relações abaixo sejam verificadas.
(35)
C0v 4*v = C0 4*
(36)
CDv 5*v = CD 5*
4262
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
Porém, como verificado na Figura 13 e na Figura 14,
com a conexão dos inversores em paralelo, a resposta
dinâmica tornou-se mais oscilatória, indicando que
não é suficiente analisar a estabilidade de apenas um
conversor quando se pretende interligar várias destes
em paralelo. Uma possível extensão deste trabalho
seria a investigação das características dinâmicas de
um sistema com vários inversores e a interação entre
eles.
Agradecimentos
Este trabalho foi financiado pela Fundação de
Amparo a Pesquisa do Estado de São Paulo FAPESP, processos número 2011/15884-6 e
2013/08545-6 e pela Universidade Tecnológica Federal do Paraná - UTFPR.
Referências Bibliográficas
Mattavelli, P. and Buso, S. (2006) Digital Control in
Power Electronics. 1st ed. Morgan & Claypool
Publishers.
Santos Filho, R. M., (2009) "Contribuição ao
controle digital doparalelismo sem comunicação
desistemas de energia ininterrupta", Tese de
Doutorado, UFMG, Belo Horizonte.
Shang-Hung Hu; Chun-Yi Kuo; Tzung-Lin Lee;
Guerrero, J.M., (2011) "Droop-controlled
inverters with seamless transition between
islanding and grid-connected operations,"
Energy Conversion Congress and Exposition
(ECCE), 2011 IEEE , vol., no., pp.2196,2201,
17-22 Sept
Poh Chiang Loh; Holmes, D.G., (2005)"Analysis of
multiloop control strategies for LC/CL/LCLfiltered voltage-source and current-source
inverters,"
Industry
Applications,
IEEE
Transactions on , vol.41, no.2, pp.644,654,
March-April 2005.
Ming Hua; Haibing Hu; Yan Xing; Guerrero, J.M.,
(2012) "Multilayer Control for Inverters in
Parallel
Operation
Without
Intercommunications," Power Electronics, IEEE
Transactions on , vol.27, no.8, pp.3651,3663.
Guan Yajuan; Wu Weiyang; Guo Xiaoqiang; Herong
Wu, (2010) "An improved droop controller for
grid-connected voltage source inverter in
microgrid," Power Electronics for Distributed
Generation Systems (PEDG), 2010, vol., no.,
pp.823,828, 16-18 June 2010.
Pottker, F.; Ignatowicz, E.; Barbi, I., (2004) "Filtros
Ativos Monofásicos para Instalações de Média
Potência". Congresso Brasileiro de Automática,
2004, Gramado, 2004.
Marafão, F. P.; Deckmann, S. M.; Pomilio, J. A.;
Machado, R. Q.; (2004), A Software-Based PLL
Model: Analysis and Applications. In:
Congresso Brasileiro de Automática, 2004,
Gramado-RS, 2004.
Figura 13 - Correntes pelo inversor 1, inversor 2 e rede.
6 Conclusão
A análise de estabilidade para um inversor com
referência de tensão gerada a partir do controlador de
droop mostrou que se um único inversor fonte de
tensão for conectado a uma microrrede, sua operação
será sempre estável e que sua resposta dinâmica pode
se tornar mais oscilatória para valores elevados dos
coeficientes de droop. Os resultados de simulação
mostram que a utilização de controlador de droop
possibilita a conexão em paralelo de inversores fonte
de tensão.
PCEP1
PCEP2
PG
QCEP1
QCEP2
QG
Figura 14 - Potência ativa da rede (4 ), inversor 1 (4x/v ) e inversor 2 (4x/ ); Potência reativa da rede (5 ), inversor 1 (5x/v) e
inversor 2 (5x/).
4263