Ministério da Educação
Universidade Tecnológica Federal do Paraná
Campus Cornélio Procópio
Coordenação de Eletrotécnica
Experiência 1 - Sistema em malha aberta
e malha fechada
Módulo Servo-mecanismo
Objetivo
Verificar experimentalmente as vantagens e desvantages de um sistema em malha
aberta e malha fechada.
Introdução
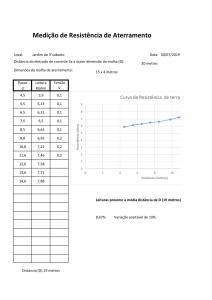
O diagrama de blocos do sistema servomecanismo em malha aberta está representado na Fig. 1. O Driver realiza o acionamento do motor de corrente contı́nua através
da tensão VU que é aplicada em sua entrada. O sinal (nı́vel de tensão) VM gerado pelo
Driver é aplicado no servo-motor que por sua vez o converte em energia mecânica para
realizar o movimento rotacional apropriado do Braço/Ponteiro. No diagrama de blocos,
a grandeza ω representa a velocidade angular do Braço/Ponteiro. O objetivo da Parte
I desta experiência é controlar a velocidade angular ω usando a configuração do
sistema em malha aberta.
VM
VU
Driver
Motor &
Engrenagem
Braço/
Ponteiro
ω
Figura 1: Diagrama de blocos do servomecanismo em malha aberta.
De modo a diferenciar as vantagens e desvantagens do sistema em malha aberta
quando comparado ao sistema em malha fechada, desenvolve-se a Parte II via diagrama
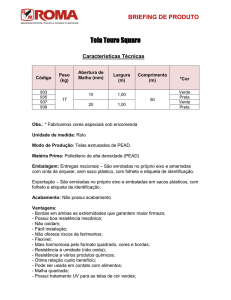
de blocos da Fig. 2. No sistema em malha fechada da Fig. 2, a informação da
velocidade angular ω é usada na entrada do Transdutor de Rotação – este elemento de
instrumentação transforma a velocidade ω em nı́vel de tensão VN . Cabe ressaltar que o
nı́vel de tensão VN é proporcional à rotação do eixo do Braço/Ponteiro. A idéia então é
utilizar um elemento chamado “Controlador”, que faz o papel de um “cérebro”, que deve
constantemente tomar decisões baseadas no nı́vel de tensão em VN . O “Controlador”
tem a capacidade de diminuir, aumentar ou manter a tensão em VU em cada instante
de tempo, mas estas decisões são tomadas levando-se em conta ambos:
• qual a velocidade angular ω desejada pelo usuário ;
• qual o nı́vel de tensão apresentada em VN .
O principal objetivo do “Controlador” é tomar decisões que mantenham a variável
controlada ω o mais próximo possı́vel de um determinado valor de referência (nos
experimentos adota-se 1 rad/s).
VM
VU
Controlador
Motor &
Engrenagem
Driver
Braço/
Ponteiro
ω
VN
Transdutor
Figura 2: Diagrama de blocos do servomecanismo em malha fechada.
Parte I - Experimento Malha Aberta
1. Mantenha o módulo com a chave de alimentação (na parte de trás) desligada (o
LED indicador deve estar apagado).
2. Montar o circuito indicado na Fig. 3 no protoboard do Módulo (certifique-se que
o Módulo está desligado). Os valores dos componentes são: R1 = R2 = 12KΩ;
P OT = 10KΩ. Certifique-se que o ponto +VU está conectado ao Módulo.
+5V
+5V
R2
R1
+VU
P OT
GN D
Figura 3: Circuito da Parte I.
3. Efetue as ligações indicadas na Tabela 1 mantendo o Módulo desligado. Certifiquese que o PC está conectado a Placa de Aquisição através do cabo USB.
2
Conector de acesso
+VN
−VN
Placa de aquisição
AI1 (pino 5)
GND (pino 1)
Tabela 1: Parte I: Ligação entre a Placa de aquisição e Módulo
4. Ligue o módulo.
5. Execute o aplicativo PID VELOCIDADE e dentro do ambiente do aplicativo
coloque a chave na posição LIGA.
6. Após efetuar os passos 1 a 5 você deve obter um gráfico semelhante a Fig. 5.
Altere a escala do gráfico caso necessário (seta em vermelho na Fig. 5). A curva
em “vermelho” apresenta a velocidade angular ω da haste do módulo servomecanismo. Altere o cursor do potenciômetro livremente e veja o que ocorre com
a velocidade da haste.
Figura 4: Parte I. 1a. tela.
Estudo de caso
Problema: Suponha que o servo-mecanismo está em uso em uma indústria alimentı́cia, e que para obter um alimento com propriedades adequadas é necessário manter
o processo com velocidade de rotação ω(t) = 1 rad/s.
1. Ajuste o potenciômetro P OT de modo a obter a velocidade de rotação ω o mais
próximo possı́vel de 1 rad/s.
⋆ Questão 1: A velocidade de rotação ω obtida apresenta variação superior a
5% em relação a velocidade desejada? (Justifique apresentando um gráfico).
3
2. Nesta etapa simula-se uma falha de carga no processo (situação extremamente
comum em processos industriais devido a possı́vel adição/remoção de carga no
sistema associado). Mantenha a velocidade de rotação ω o mais próximo possı́vel
de 1 rad/s. Remova do circuito o resistor R2 (veja a Fig. 3).
⋆ Questão 2: O que ocorre com a velocidade de rotação ω após remover-se o
resistor R2 ? (Justifique apresentando um gráfico).
3. Ajuste o potenciômetro P OT de modo a tentar corrigir a falha e restabelecer a
velocidade de rotação ω o mais próximo possı́vel de 1 rad/s.
4. Mantendo a velocidade de rotação ω o mais próximo possı́vel de 1 rad/s, reintroduza no circuito o resistor R2 .
⋆ Questão 3: O que ocorre com a velocidade de rotação ω? (Justifique apresentando um gráfico).
5. Fato: Sempre que houve uma falha você teve que intervir de modo a realizar um
“controle manual” do processo objetivando manter a velocidade de rotação ω o
mais próximo possı́vel de 1 rad/s.
⋆ Questão 4: Quais as vantagens e/ou desvantagens de tal procedimento?
6. Após concluı́do o experimento desligue o módulo e logo após desligue o aplicativo PID VELOCIDADE.
Parte II - Experimento Malha Fechada
Nesta Parte II utiliza-se o PC para fazer o papel do “Controlador” na Fig. 2.
1. Mantenha o módulo com a chave de alimentação (na parte de trás) desligada (o
LED indicador deve estar apagado).
AO0 (pino 14)
Monte o circuito da figura ao lado no Protoboard.
Observe que P OT = 10KΩ. Uma extremidade
2. do potenciômetro deve estar conectado a +VU e a
outra extremidade deve estar conectado em AO0
(pino 14) da Placa de Aquisição de dados.
P OT
+VU
3. Efetue as ligações indicadas na Tabela 2 mantendo o Módulo desligado. Certifiquese que o PC está conectado a Placa de Aquisição através do cabo USB.
Conector de acesso
+VN
−VN
Placa de aquisição
AI1 (pino 5)
GND (pino 1)
Tabela 2: Ligação entre a Placa de aquisição e Módulo
4. Ligue o módulo. Execute o aplicativo PID VELOCIDADE e dentro do ambiente do aplicativo coloque a chave na posição LIGA.
4
5. Certifique-se que o aplicativo PID VELOCIDADE possui valores Kp = Ki = 1
e SetP oint = 1. Este valor SetP oint = 1 representa a referência desejada, ou
seja, no experimento representa a velocidade de rotação ω que deseja-se que o
servomecanismo mantenha durante a sua operação.
Figura 5: Parte II. Tela do aplicativo PID VELOCIDADE.
6. Verifique se a velocidade de rotação ω mantêm-se próximo do valor desejado de
1 rad/s.
⋆ Questão 5: A velocidade de rotação ω obtida apresenta variação superior a
5% em relação a velocidade desejada? (Justifique apresentando um gráfico).
7. Nesta etapa simula-se uma falha no sistema. Ou ainda uma alteração de carga
no Braço/Ponteiro, semelhante a alteração da densidade do alimento processado
dentro de um tanque industrial. Altere abruptamente o cursor do potenciômetro
P OT – posicionando-o numa extremidade e após 30 segundos posicionando-o na
outra extremidade.
⋆ Questão 6: O que ocorre com a velocidade de rotação ω? (Justifique apresentando um gráfico).
⋆ Questão 7: Você precisou alterar manualmente algum elemento do sistema
para manter a velocidade de rotação ω o mais próximo possı́vel de 1 rad/s? Podese então concluir que o sistema conseguiu corrigir as falhas “automaticamente”?
⋆ Questão 8: Quais as principais vantagens e/ou desvantagens do sistema em
malha aberta em comparação ao sistema em malha fechada?
5