Instrumentação e Aquisição de Sinais
MEBm – Mestrado Integrado em Engenharia Biomédica
2008/2009
Apoio ao Guia de Laboratório
ANÁLISE DE SINAIS
NO DOMÍNIO DO TEMPO
1. INTRODUÇÃO
Ao tratarmos qualquer instrumento de medição, é nossa preocupação constante estabelecer o domínio de
frequências em que ele pode ser utilizado. Ao considerarmos instrumentos que são não só de medição mas também
úteis do ponto de vista de visualização e registo de grandezas variáveis no tempo, essa preocupação reforça-se, uma
vez que a noção de largura de banda e de fidelidade de reprodução estão intimamente ligadas, como se sabe e
veremos de imediato a seguir.
Consideremos, então, um instrumento de visualização e registo, como por exemplo um osciloscópio analógico de
tempo real, como um sistema linear e invariante no tempo e assim caracterizado pelo seu operador linear de
transmissão (função de transferência), F(�) que estabelece a relação entre uma grandeza de entrada, e(t), e a sua
reprodução, r(t). Que devemos exigir a tal sistema para que r(t) seja uma reprodução fiel de e(t)?
Em primeiro lugar, convém ter presente que r(t) representará fielmente e(t) se e só se
r(t) � A e(t � �)
(1.1)
isto é, se r(t) e e(t) diferirem apenas de um factor de escala constante, A, e se r(t=t1) representar e no instante t1-� (�
atraso do sistema).
Para responder à questão formulada suponhamos que a grandeza de entrada é periódica de período
T=2�/�������������������������������������������������������������
�
e(t) � E0 � � En cos � n�t � �n �
(1.2)
n �1
e que o operador linear de transmissão do sistema é descrito no domínio da frequência por:
F(�) � F(�) � � j�( � )
Então, em regime forçado, a reprodução r(t) será dada por:
(1.3)
�
�
n �1
n �1
r(t) � R0 � � Rn cos � n�t � � n � � E0F(0)� � j�(0) � � EnF(n�)cos � n�t � �n � �(n��
(1.4)
Se o operador de transmissão for tal que:
F(�) � F
�n � ��
n = 0,1,2,...
(1.5)
a sua substituição em (1.4) conduz a:
�
�
r(t) � F �E0 � � En cos �n�(t � �) � �n � � F r(t � � )
n �1
�
(1.6)
isto é, se o operador linear de transmissão tiver uma característica de amplitude constante na frequência e uma
característica de fase variando linearmente com a frequência –relações (1.5)-, a reprodução será fiel – (1.6)-. A
conclusão agora obtida é a mesma ainda que a grandeza de entrada não seja periódica mas que possa ser
representada por uma transformada de Fourier.
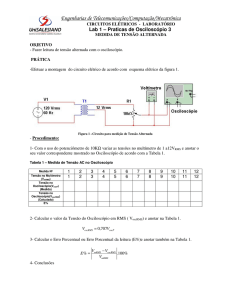
Os instrumentos de reprodução reais não são, obviamente, ideais mas sim do tipo passa baixo com um pólo
dominante, como se indica na Figura 1.1.
F(�)
F0
F0 / 2
0
0
�
�C
����
��
0
�
0
Figura 1.1: Características de amplitude e de fase de um sistema de reprodução ideal (traço contínuo) e real (tracejado).
Dessa figura constata-se que, como seria de esperar, até à frequência de corte, tais instrumentos têm um
comportamento quase ideal, pelo que na banda passante, 0-�c asseguram uma visualização correcta da respectiva
grandeza de entrada. É neste sentido que se especifica a banda útil por exemplo de um osciloscópio. Ao dizer-se que
um osciloscópio é de, por exemplo, 20 MHz tal significa que a sua banda de utilização é de 0-20 MHz, ou seja, que a
forma de onda apresentada no visor do instrumento representa correctamente a sua tensão de entrada desde que
esta tenha um conteúdo espectral importante apenas até 20 MHz; caso contrário, a forma visualizada pode ser
substancialmente diferente da realidade. Um exemplo de má utilização de um osciloscópio de 20 MHz é na
visualização de uma onda quadrada com essa frequência. A forma de onda visualizada nesse caso seria não
quadrada mas praticamente sinusoidal, uma vez que apenas a componente fundamental (20 MHz) da onda quadrada
estaria dentro da banda passante do sistema.
Uma outra manifestação da limitação resultante da banda passante finita de um instrumento de visualização real é
quando da visualização de troços de formas de onda com derivadas temporais elevadas. Este facto é naturalmente
de esperar, uma vez que, como se sabe, decisões instantâneas implicam larguras de banda infinitas. No caso de
sistemas passa baixo de 1ª ordem ou de ordem superior com pólo dominante, o produto largura de banda, �f, tempo
de crescimento, tc, é sensivelmente constante, independente do sistema, tendo-se:
�f � t C
0,35
Atente-se, por exemplo, que para um filtro passa baixo passivo RC se tem: �f �
(1.7)
1
e t C � 2,2RC .
2�RC
Assim, e ainda no caso do osciloscópio de 20 MHz ter-se-á:
tC �
0,35
� 17,5 ns
20 � 10 6
(1.8)
Significa isto que troços de formas de onda com tempos de crescimento menores do que 17,5 ns serão visualizados
com uma derivada correspondente a este valor imposto pelas características do instrumento e não pela forma de
onda a visualizar.
1.2
OSCILOSCÓPIO ANALÓGICO DE TEMPO REAL (OATR)
Os parágrafos que se seguem respeitam a um instrumento de medição fundamentalmente utilizado para visualizar
num alvo plano - coordenadas x,y, (ecrã) - a evolução no tempo de uma ou mais tensões, o osciloscópio analógico de
tempo real (OATR). Trata-se de um instrumento que opera sobre tensões eléctricas, que não recorre a amostragem e
que permite medir a amplitude, frequência, período e desfasagens entre tensões. Pode ser também utilizado
aplicando duas tensões sinusoidais de forma apropriada a medir frequências relativas e desfasagens através das
curvas de Lissajous.
A imagem é obtida a partir de fotões que são emitidos quando electrões de um feixe electrónico chocam num alvo
revestido de fósforo. O ponto de impacto do feixe em cada instante é o resultado do desvio nele provocado por duas
tensões eléctricas: uma, que produz o desvio segundo y, é proporcional à tensão a visualizar; outra, que desvia o
feixe segundo x, varia linearmente no tempo e é produzida internamente no instrumento nos circuitos ditos da base
de tempo. Para que o desvio provocado seja significativo as tensões em causa terão de ser relativamente elevadas,
isto é, tipicamente, da ordem das centenas de volt.
A persistência limitada do alvo leva a que nas versões de OATR ditos sem memória apenas possam ser visualizadas
tensões que se repetem no tempo, como é o caso das tensões periódicas.
Do que fica dito pode-se concluir que o OATR requer blocos que realizem as seguintes funções: geração, focagem,
aceleração e desvio de um feixe electrónico – tubo de raios catódicos –; condicionamento da tensão de entrada para
produção da tensão de desvio vertical – canal vertical –; geração da tensão que promove o desvio horizontal do feixe
– base de tempo – ; condicionamento desta tensão para aplicação às placas de desvio horizontal – canal horizontal –
. Para além disso, e como veremos ais adiante, é necessário garantir o sincronismo entre a base de tempo e a
tensão a visualizar, o que requer um conjunto de circuitos específicos designado por disparador.
Trata-se de um aparelho de medida versátil. Analisaremos a sua constituição começando pelo tubo de raios
catódicos, no qual a imagem é obtida, abordando depois os blocos que a partir da tensão que pretendemos observar
fazem o seu tratamento até ser aplicada ao tubo de raios catódicos.
1.2.1
Tubo de raios catódicos de um osciloscópio
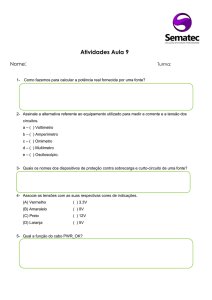
É um tubo de vidro dentro do qual se fez o vazio onde os electrões se vão mover. A Figura 1.2 representa,
esquematicamente, o interior do tubo.
W
A1
DH
Dv
FC A2
L
K
x’
y
F
y’
x
PA
Brilho
Focagem
UPA
F–
K–
W–
A1 –
FC –
A2 –
DV –
DH –
G–
PA –
L–
Filamento
Cátodo
Cilindro de Wehnelt
Primeiro ânodo de aceleração
Eléctrodo de focagem
Segundo ânodo de aceleração
Placas de desvio vertical
Placas de desvio horizontal
Revestimento interior de grafite
Ânodo de pós aceleração
Alvo formado por substância luminescente que reveste interiormente a face plana do tubo.
Figura 1.2: Interior do tubo de raios catódicos de um OATR.
Os electrões são libertados por efeito termoiónico por um cátodo K aquecido pelo calor produzido por efeito de Joule
devido a uma corrente eléctrica num filamento, F. Um eléctrodo, W (wehnelt) a um potencial negativo em relação ao
cátodo, permite comandar o brilho da imagem no alvo, uma vez que o seu potencial permite comandar o número de
electrões que sai do cátodo na unidade de tempo, ou seja, a intensidade do feixe electrónico. Se o wehnelt estiver
suficientemente negativo podem mesmo não sair electrões do cátodo. Diz-se então que o feixe está cortado.
Antes de ser desviado, o feixe electrónico é focado e acelerado recorrendo a um conjunto de eléctrodos metálicos
que devido ao potencial a que estão aumentam a velocidade dos electrões do feixe fazendo portanto uma préaceleração.
O sistema de desvio é formado por dois pares de placas de desvio. Cada par de placas paralelas produz no alvo um
desvio na direcção normal ao plano das placas e proporcional à tensão aplicada entre placas.
Assim. Se entre as placas yy’ tivermos uma tensão
Uy � UMy sen(�t � � )
(1.9)
o desvio segundo y será
Dy � CyUMy sen(�t � � )
(1.10)
sendo Cy a sensibilidade do desvio segundo y. O seu inverso é a constante de desvio que se exprime em V/cm.
Se entre as placas xx’ se se tiver
Ux � kt
(1.11)
onde k é uma constante e t o tempo (ver Figura 1.3), o desvio segundo x será
D x � Cx kt
(1.12)
onde Cx é a sensibilidade para este par de placas. A tensão aplicada a este par de placas é chamada a tensão de varrimento ou tensão da base de tempo.
Se de (1.12) tirarmos o tempo t
t�
Dx
k Cx
(1.13)
e substituirmos em (1.10) obtemos
D y � C yUMy sen � �Dx (k C x ) � � �
(1.14)
Comparando (1.14) com (1.9) vemos que a variação do desvio segundo y no alvo com x é semelhante à variação de
Uy com o tempo.
A tensão Ux dada por (1.11) não pode crescer indefinidamente (tempo de varrimento, Figura 1.3), senão o desvio
segundo x levaria o feixe a sair, pela direita, do visor. Assim, a tensão Ux volta a zero ao fim de um certo tempo
(tempo de retrocesso, Figura 1.3), tomando a forma de dente de serra da Figura 1.3.
Se o sistema parasse ao fim de t2 da Figura 1.3 a imagem via-se no alvo durante um tempo muito curto, porque o
(ecrã) alvo tem uma persistência curta. É então necessário, como já referimos, que o sistema repita a imagem no
alvo. Para que se possa repetir, é preciso que circuitos electrónicos exteriores ao tubo de raios catódicos disparem a
base de tempo, isto é, repitam a tensão Ux , partindo sempre do mesmo valor da tensão Uy . Para que a imagem se
repita deve partir sempre dos mesmos valores de Ux e Uy . A isso chama-se sincronizar a base de tempo com a
tensão a observar. Para que tal aconteça, e após o regresso do feixe electrónico à extremidade esquerda do visor, é
geralmente necessário aguardar algum tempo. A esse intervalo de tempo chama-se de tempo morto (ver Figura 1.3).
Figura 1.3: OATR: (a) tensão em dente de serra da base de tempo: 0-t1 - tempo de varrimento; t1-t2 – tempo de retrocesso; t2-t3 – tempo morto; (b) tensão que, integrada, produz o dente de serra (integrador com inversão).
Ux
0
(a)
t
t1 t 2 t 3
(b)
t
0
O feixe de electrões depois de abandonar as placas de desvio segue em linha recta em direcção ao alvo. Para isso
contribui um revestimento do tubo (G da Figura 1.2) feito com um material condutor (acuadag) que torna a superfície
do tubo equipotencial. O alvo está a uma tensão muito acima da do cátodo. Isso deve-se à tensão de pós aceleração
(alguns kV em relação ao cátodo), que na Figura 1.2 está aplicada ao anel AT. Graças a ela os electrões batem no
7
ecrã com grande velocidade (da ordem de 10 m/s) portanto com grande energia cinética. O alvo está revestido de
um material que transforma a energia cinética dos electrões em luz, sendo possível ver os pontos onde bateram, e
que como vimos reproduzem a tensão a observar. Para efeitos de medição, é colocada externamente ao tubo de
raios catódicos uma superfície plástica graduada tipicamente com 10 divisões horizontais e 8 divisões verticais.
1.2.2
Diagrama de blocos de um osciloscópio. Comandos acessíveis no painel e as suas funções
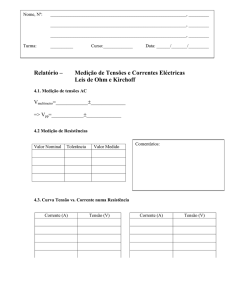
Como anteriormente referido, para além do tubo de raios catódicos, um OATR inclui ainda um canal vertical (canal y),
um cana horizontal (canal x), uma base de tempo e circuitos de disparo da tensão de varrimento associados. A
Figura 1.4 representa um diagrama de blocos de um OATR.
1.2.2.1
Canal Y
Tem por função condicionar a tensão aplicada à entrada Y de forma a estar em condições de ser aplicada às placas
de desvio segundo y.
Canal Vertical
I0
Atenuação
Amplificação
prévia
Amplificação
final
AC
Entrada Y
Atraso
DC
GND
Posição
Amplificação
da tensão de
sincronismo
Cal.
Canal Horizontal
Amplificação
Atenuação prévia
I1
AC
Entrada X
DC
GND
X-Ext.
Tubo de raios
catódicos
Amplificação
final
X-Int.
H
Posição
V
Base de Tempo
Disparador
I2
Disparo Disparo Ext.
Externo
Velocidade
Inclinação
Báscula de
disparo
+
�
Dif.
+
Báscula de
comando
Integrador
Óptica
Disparo Int.
Focagem
Estabilidade
Astigmatismo
-1
Nível
Báscula de
retrocesso
Intensidade
Manual
Figura 1.4: Diagrama de blocos do osciloscópio analógico de tempo real.
Comutador de entrada
Um comutador I0 (Figura 1.4) permite ligar a entrada do canal à terra (massa), posição GND (do inglês “ground”)
forçando que a tensão à entrada seja zero, ou à tensão a observar. Esta por sua vez pode ser ligada:
� Através de um condensador, posição AC de I0 sendo retirada a componente contínua da tensão aplicada.
Observa-se então só a componente variável no tempo da tensão.
� Directamente, posição DC de I0 . Então observa-se no alvo o sinal completo, com a componente contínua e
alternada.
Atenuador e amplificador
Como referido anteriormente, as tensões a aplicar às placas de desvio serão da ordem das centenas de volt. Isto
significa que a tensão de entrada tem de ser amplificada antes de ser aplicada às placas de desvio vertical. No
entanto, o amplificador em causa é de ganho fixo e ajustado para o menor valor da tensão de entrada que se
pretenda visualizar. Significa isto que tensões de entrada superiores terão de ser previamente atenuadas. Essa é a
função de um atenuador de tensão colocado entre a entrada do canal vertical do osciloscópio e a entrada do
amplificador. O atenuador pode ser ajustado através de dois botões: um de ajuste discreto usualmente na sequência
1, 2, 5 e graduado em volt/div (volt/divisão, também mais excepcionalmente volt/cm)); outro de variação contínua
não graduado. Note-se que o factor de escala devido ao atenuador e indicado pelo primeiro daqueles botões só é
válido se o botão de ajuste contínuo da atenuação estiver na posição de calibrado (CAL).
O botão da posição vertical do feixe actua no amplificador permitindo somar ao sinal amplificado a observar uma
componente contínua. Varia assim a posição vertical (direcção y) da imagem no alvo.
O ajuste CAL, que pode ser feito no painel com uma chave de fendas, permite ajustar o ganho do amplificador.
Colocando na entrada um sinal de amplitude conhecida, actua-se em CAL até que a amplitude da imagem no ecrã
esteja correcta para a posição escolhida para o botão volt/cm.
A saída do bloco canal y (Figura 1.4) entre o amplificador e o bloco de atraso é uma réplica da tensão de entrada.
Destina-se a poder comandar com esta tensão o instante em que é disparada a base de tempo, quando o disparo é
interno (Botão TRIG (do inglês “trigger”, gatilho) na posição INT, na Figura. 1.4 interruptor I2 ).
Bloco de atraso
O bloco de atraso assegura que a tensão que está aplicada na entrada y só seja aplicada às placas de desvio um
pouco depois de ter aparecido na entrada. Isto é necessário para dar tempo aos circuitos electrónicos, que geram a
tensão de varrimento (dente de serra) a aplicar segundo x, de actuarem. Se assim não fosse, não se chegava a ver o
início da tensão Uy que produzia o disparo da base de tempo, uma vez que esta só arrancava um pouco depois.
1.2.2.2
Canal X
É análogo ao canal y, possuindo também um atenuador, que é modificado pelo botão time/div (mais
excepcionalmente time/cm), um amplificador e um comando contínuo de posição na direcção x. Não possui no
entanto geralmente possibilidade de calibração externa. Se necessária, esta terá geralmente que ser feita na fábrica.
No modo de funcionamento mais habitual, que é o de visualização de tensões que variam no tempo, é aplicada a
este canal uma tensão em dente de serra, dita de varrimento e que é gerada internamente pela base de tempo.
Se pretendermos aplicar a este canal uma tensão exterior ao instrumento, existe para isso uma entrada x. Um
comutador deve ser colocado na posição x para desligar a base de tempo.
1.2.2.3
Disparo da base de tempo
Nos OATR actuais, a geração da tensão em dente de serra pode ser controlada ou não. No primeiro caso, dito modo
disparado (correspondente em inglês a triggered mas que pode ser identificado nessa língua por outros termos, como
normal), o instante em que se inicia a tensão de varrimento pode ser comandado pelo sinal a observar, aplicado na
entrada y, ou por um sinal exterior. Neste caso, esse sinal deve ser aplicado na entrada EXT (do inglês “external”).
Um comutador de disparo, (CH1, CH2, EXT são as posições), permite escolher o disparo pelo sinal no canal 1, 2 ou
exterior. No segundo caso, dito modo autónomo ou automático (em inglês, auto), a geração do dente de serra é
independente da existência de qualquer sinal nas entradas do OATR, incluindo a de disparo EXT; ajustada a
velocidade de varrimento no respectivo selector da base de tempo, a tensão em dente de serra é produzida com
tempos de varrimento e de retrocesso fixos e sem tempo morto (ver Figura 1.3). É ainda vulgar hoje em dia que em
modo autónomo a base de tempo passe automaticamente a modo disparado se existir tensão no canal de entrada a
visualizar.
O botão LEVEL (nível, em inglês) permite comandar o nível da tensão de disparo que provoca o início do dente de
serra em modo disparado. Comanda-se assim o valor da tensão a observar para o qual a imagem começa no alvo.
Este comando não está activo na posição AUTO, em que o disparo se faz de forma automática.
O comutador + – permite seleccionar o flanco (derivada) do sinal que é utilizado para início do varrimento.
1.2.2.4
Base de tempo
Trata-se do conjunto de circuitos que gera a tensão de varrimento, isto é, o dente de serra aplicado às placas de
desvio segundo x. O componente base é um integrador electrónico ao qual é aplicada uma tensão contínua (Figura
1.3 (b) cuja polaridade e amplitude depende de se tratar do intervalo correspondente ao varrimento do feixe da
esquerda para a direita (0-t1 na Figura 1.3 (a)) ou ao retrocesso da direita para a esquerda (intervalo t1-t2 na Figura
1.3 (a)).
O comando VAR permite variar continuamente a inclinação do flanco ascendente do dente de serra (do inglês
“variable”, variável). Atenção que também aqui a indicação do botão time/cm só é correcta de o comando de VAR
estiver na posição CAL (calibrado).
Da base de tempo sai também o sinal que corta o feixe de electrões durante o retorno da base de tempo (flanco
descendente do dente de serra) antes de novo varrimento. Se assim não fosse aparecia um traço no alvo ligando o
ponto em que a imagem termina com o ponto em que se inicia.
1.2.2.5
Entrada da Modulação Z
A entrada de modulação Z, Z MOD, geralmente na parte de trás do osciloscópio, dá acesso ao wehnelt e permite
controlar o brilho da imagem a partir de uma tensão externa. Podem-se assim obter zonas da imagem mais
brilhantes.
1.2.2.6
Visualização de vários sinais de entrada: Modos Alternado e Segmentado
Mesmo com um só cátodo, e portanto um só feixe de electrões, é possível observar mais de um sinal. Importa, nesse
caso, “partilhar” o feixe pelos diferentes canais a que são aplicados os sinais a visualizar. Há duas formas de
conseguir o resultado referido: modos alternado e modo segmentado (este segundo é designado em inglês por
“chopped”, que significa cortado em lascas ou fatias. Não confundir com osciloscópios de amostragem, que em inglês
se designam por “sampling oscilloscopes”).
Modo alternado
Neste modo, em varrimentos consecutivos da tensão em dente de serra da base de tempo são apresentadas às
placas x, alternadamente, as diferentes tensões a observar. Durante um dente aparece no alvo uma das tensões,
durante o seguinte a outra e assim sucessivamente, repetindo-se o processo.
Se a alternância for suficientemente rápida o observador não dá por isso, parecendo-lhe que as diferentes imagens
são simultâneas embora de facto o não sejam.
Este método só é possível quando o ritmo de repetição das tensões a observar é suficientemente elevado quando
comparado com a “resposta” da vista humana, que só distingue variações em tempos da ordem de 0,1 segundos.
Chama-se à atenção para o cuidado a ter para as medições de tempo envolvendo os diferentes sinais uma vez que
os instantes que representam o tempo no respectivo eixo (xx’) não são os mesmos. Assim, é possível obter
diferenças temporais relativas, mas não diferenças temporais absolutos.
Modo “Chopped” ou segmentado
Neste modo há circuitos electrónicos internos ao osciloscópio que em intervalos muito curtos �t (tipicamente
inferiores a 1 �s), colhem segmentos de um e outro sinal (ver Figura 1.5) alternadamente e os aplicam às placas de
desvio.
Trata-se de um modo que é útil quando as formas de onda a visualizar impõem velocidades lentas da base de tempo.
Nestas condições, o modo alternado é inadequado porque não permite visualização “simultânea” das diferentes
tensões de entrada, enquanto que o elevado número de troços que constituem cada um dos sinais visualizados
conduz a traços praticamente contínuos do ponto de vista do observador. Note-se, também, que o modo segmentado
é inadequado quando a velocidade da base de tempo é elevada, uma vez que nesse caso os diferentes segmentos
são ou podem ser visíveis. Porque o modo óptimo de comutação do feixe depende da velocidade de varrimento, é
comum nos OATR actuais não existir a possibilidade de selecção do modo mas antes esta ser feita em função da
posição do selector time/div da base de tempo.
u1
u2
tempo
tempo
Figura 1.5: Amostras alternadas de dois sinais, u1 e u2.
Visualização “simultânea” de sinais de diferentes frequências
Como se viu anteriormente, em modo disparado, a base de tempo sincronizará com o sinal utilizado para disparo.
Este facto leva a um problema quando se pretende visualizar sinais de diferentes frequências, uma vez que
estabilizada a imagem para um dos canais não o estará para os restantes. Este problema é superado se em modo
alternado se puder seleccionar o sinal visualizado em cada varrimento para sinal de disparo. Muitos instrumentos
actualmente têm esta possibilidade. Importa então seleccionar o modo alternado e no disparo, na fonte de disparo
(trigger source) a opção usualmente designada por vertical mode.
1.2.2.7
Especificações Essenciais
Para além da noção de largura de banda do osciloscópio, cuja importância para a correcta utilização de um OATR foi
analisada em 1.1, importa ter ainda em consideração o seguinte:
Osciloscópio de feixe simples (single beam) são aqueles que possuem um só cátodo, sistema de focagem, préaceleração, e em que, portanto, há no tubo só um feixe de electrões. Se houver dois diz-se que o osciloscópio é de
duplo feixe (dual beam extremamente raros hoje em dia).
Como se viu anteriormente, mesmo com feixe simples é possível observar várias tensões no alvo (dual ou multi-trace oscilloscope).
As entradas dos sinais a observar podem ser simples (as mais usuais), quando cada um dos sinais é aplicado entre
a entrada do canal e a terra (massa), ou diferenciais, quando há dois terminais de entrada ambos isolados da terra,
sendo a tensão a observar aplicada entre eles. Há então que ter o cuidado de não exceder a tensão diferencial
máxima, que é o valor máximo que a tensão entre as duas entradas pode tomar.
Porque os OATR actuais só permitem visualizar directamente tensões (porque o desvio é eléctrico) reportadas à terra
(ver 1.2.2.8), é normal providenciar uma solução para visualizar tensões ditas flutuantes, isto é, em que nenhum dos
dois pontos entre os quais ela é definida está ao potencial de referência. Isso passa pela possibilidade de visualizar a
soma dos dois sinais (posição ADD de um selector) e de poder trocar a polaridade do sinal aplicado a um dos canais
(selector invert). A este ponto voltaremos em 1.2.2.8.
A sensibilidade de um osciloscópio representa a menor amplitude de tensão de entrada que produz um desvio
observável. Especifica-se em mV/div ou �V/div e é o menor valor indicado no botão volt/div.
A exactidão (accuracy) traduz a aproximação entre os valores observados e a realidade. Define-se quer para a
escala vertical quer para a escala temporal da representação. É em ambos os casos tipicamente de �2% a �5%.
Exemplo: Se for de 5% quando em face da imagem no alvo e da posição do botão volt/div se ler 2 V, o erro é de
�0,05�2=�0,1 V sendo o valor medido 2 V � 0,1 V, portanto compreendido entre 1,9 V e 2,1 V.
1.2.2.8
Bornos BNC. Fichas “Schuko”. Sondas de medida. Precauções para evitar curto-circuito através da terra de vários instrumentos ligados simultaneamente
Os terminais de entrada dos canais Y, EXT e X são geralmente do tipo BNC (Figura 1.6 (a)) fêmea, sendo os cabos
para ligação do sinal do tipo BNC macho (Figura 1.6 (b)).
(a)
(b)
Figura 1.6: (a) Terminal BNC, fêmea. (b) Terminal BNC, macho.
A parte exterior do terminal de painel, está ligado à caixa metálica do osciloscópio, que por sua vez está ligada à terra
da ficha de alimentação a ligar à rede de energia (230 Vef). Ao orifício central é aplicado o sinal a observar em
relação à terra. O cabo através do qual o sinal é aplicado tem um terminal do mesmo tipo mas macho. O cabo de
dois condutores dito coaxial, tem um condutor interior, que transporta o sinal, isolado de uma trança metálica, o
condutor exterior, por um dieléctrico. Esta trança está ligada à parte metálica exterior do terminal BNC.
Como em muitos outros equipamentos, a ficha de ligação do osciloscópio à rede de 230 Vef, 50 Hz tem 3 terminais
(Figura 1.7).
Terminal de terra
Figura 1.7: Ficha “Schuko” de alimentação.
Dois terminais serão ligados à fase e neutro da rede de 230 Vef. São cilíndricos. Em montagens delicadas, e para
alguns instrumentos, não é indiferente qual fica ligado ao neutro e à fase do ponto de vista do ruído, isto é, do
aparecimento de tensões indesejáveis independentes do sinal a observar; geralmente é indiferente a ligação. O
terceiro terminal, terra, é formado por um par de patilhas metálicas laterais, uma de cada lado da ficha, que encaixam
em patilhas correspondentes da tomada. Quando se introduz a ficha nesta, a carcaça metálica do instrumento fica
ligada à terra da instalação de energia eléctrica e, portanto, à terra de todas as outras tomadas.
Tendo vários instrumentos, geradores, osciloscópios, etc., alimentados pela rede, as caixas metálicas de todos eles
ficam ligadas entre si à terra. Isto baixa o ruído. Há no entanto que ter este facto em atenção para evitar curtocircuitos ao fazer ligações entre diversos aparelhos.
Na Figura 1.8 apresenta-se um exemplo de uma ligação que faria um curto-circuito através da terra das fichas de
alimentação (F):
Osciloscópio
A
Gerador
de sinal
R1
U
u1
B
1
2
R2
Terra da
rede
Ligados por dentro
do instrumento
u2
BNC
C
Terra da
rede
Ligados por dentro
do instrumento
Figura 1.8: Curto-circuito devido às ligações à terra dos instrumentos.
Através da terra da rede, as carcaças dos dois aparelhos, gerador e osciloscópio, estão ligadas. Assim o ponto C
está ao potencial da terra através da carcaça do gerador. O ponto A está ao potencial da terra através da carcaça do
osciloscópio. Assim os pontos A e C estão ao mesmo potencial. Isto é, a saída do gerador está em curto circuito!!
Repare-se ainda que trocar a posição dos fios 1 e 2 não resolve o problema. Agora seriam os pontos B e C que
estariam em curto-circuito R2 estaria assim em curto-circuito, sendo U2 � 0 e portanto U1 � U .
A tensão U1 pode ser no entanto obtida como a diferença entre as tensões U e U2 que podem ser medidas sem
problema. Para isso, ligar-se-ia cada uma dessas tensões a um canal do osciloscópio, tendo o cuidado de ligar U2 a
um canal que pudesse ser invertido. Em seguida colocavam-se os selectores dos atenuadores dos dois canais na mesma posição, invertia-se o canal de U2 e somavam-se os dois sinais (botão ADD). Chama-se à atenção para
que a forma visualizada só corresponde a U-U2 se as escalas nos dois canais forem as mesmas.
As sondas de medida para osciloscópio, destinam-se a poder medir sinais em pontos de circuito onde não existe
terminal de saída (BNC ou outros como os terminais para banana, Figura 1.9). Permitem a ligação de um só condutor.
As sondas têm uma “garra” na ponta, que permite prender a sonda a qualquer fio nú, isto é sem isolamento, como os
terminais das resistências, transistores, etc..
Há sondas que são atenuadoras. Trata-se de divisores de tensão resistivos compensados, devendo o sinal medido
no osciloscópio ser multiplicado pelo valor da atenuação.
(a)
(b)
Figura 1.9: (a) Terminal para banana; (b) Cabo com banana.
Divisor (ou atenuador) de tensão resistivo compensado
Na versão mais simples, um divisor de tensão resistivo é constituído, como é sabido, por duas resistências,
R1 e
R2 , como se representa na Figura 1.10(a). Para essa configuração tem-se:
u2 �
R2
u1
R1 � R2
(1.15)
C1
R1
R1
R2
u1
(a)
u2
u1
R2
C2
u2
(b)
Figura 1.10: Divisor de tensão resistivo: (a) sem considerar a influência da capacidade de entrada do circuito que o procede; (b) com condensador de compensação C1.
Quando se liga o divisor a um circuito, como por exemplo o canal vertical de um OATR, dever-se-á ter em
consideração a impedância de entrada desse circuito. Normalmente essa impedância pode ser representada sob a
forma de um circuito RC paralelo. Para um OATR, R é geralmente 1 M� e a capacidade é de alguns pF. Deste modo,
e desde que R2 seja não superior, digamos, a 1 M�, pode-se dizer que o efeito da impedância de entrada do circuito
a jusante do divisor de tensão se pode reduzir à consideração da sua componente capacitiva, traduzida no
condensador C2 da Figura 1.10(b). O efeito desse condensador sobre a relação u2 u1 do divisor de tensão é o de a
tornar dependente da frequência, isto é, não dependendo apenas de R1 e R2 (supostas invariáveis na frequência),
mas também da frequência de u1 . De facto tem-se em regime alternado sinusoidal:
R2
1 � j�R2C2
R2
U2 �
U1
�
R2
(R1 � R2 � j�R1R2C2 )
R1 �
1 � j�R2C2
Em corrente contínua obtém-se, naturalmente a relação (1.15), mas quando
(1.16)
� � � a relação entre u2 e u2 tende
para zero.
Considere-se então o efeito de inclusão de um condensador em paralelo com R1 , C1 na Figura 1.10. A relação
(1.16) altera-se vindo agora:
R2
1 � j�R2C2
R2 (1 � j�R1C1)
�
U2 �
U1 �
R1
R2
(R1 � R2 ) � j�R1R2C2 � j�R1R2C1
�
1 � j�R1C1 1 � j�R2C2
(1.17)
R2
(1 � j�R1C1)
�
U1
R1 � R2 �
�
R1R2
�
�
�
1
j
(C
C
)
�
1
2 �
R1 � R2
�
�
Facilmente se conclui que neste caso se tem:
�U
lim � 2
�� 0 �� U1
�
R2
� a0
�� �
� R1 � R2
(1.18)
�U �
C1
lim � 2 � �
� a�
��� �� U1 �� C1 � C2
(1.19)
Pretendendo-se que a relação U2 U1 seja independente da frequência deverão (1.18) e (1.19) ser iguais, o que se
verifica quando:
R1C1 � R2C2
(1.20)
De facto, substituindo (1.20) em (1.18) obtém-se (1.15) que é a relação do divisor de tensão em vazio. Conclui-se,
portanto, que a inclusão de um condensador C1 , com o valor que se obtém a partir de (1.20) permite que o divisor de
tensão R2R1 estabeleça uma relação entre u2 e u1 equivalente à do divisor em vazio mas quando na realidade ele
se encontra ligado a um circuito de capacidade de entrada C2 .
Examinando (1.17) verifica-se que C1 introduz um zero na função de transferência U2 U1 quando esse zero se situa
na mesma frequência do pólo da respectiva função de transferência – zero do denominador de (1.17) – a função de
transferência vale (1.18) ou (1.19). Diz-se, neste caso, que o zero compensa o pólo na função de transferência e que
o divisor de tensão está compensado. A compensação de um divisor de tensão consiste, pois no ajuste de C1 de
modo a que isto ocorra. A verificação desse ajuste pode-se realizar experimentalmente por duas vias:
(a)
ajuste no domínio de frequência: uma vez que a situação de compensação corresponde a a0 � a� , pode-se
procurá-la aplicando ao divisor uma tensão u1 alternada sinusoidal de amplitude fixa e variando a sua
frequência: quando a tensão
u2 mantiver ao longo da frequência numa amplitude também constante então C1
está ajustado para o valor conveniente. Se u2 aumenta quando a frequência de u1 aumenta, C1 é superior a
esse valor dizendo-se que o divisor está sobrecompensado; se u2 diminui quando a frequência de u1 aumenta,
C1 é inferior ao de compensação dizendo-se que o divisor está subcompensado;
(b)
ajuste no domínio do tempo: aplicando ao divisor uma tensão u1 do tipo rectangular, a tensão u2 pode ter uma
das três formas representadas na Figura 1.11.
u2
u2
u2
t
t
t
Figura 1.11: Tensão de saída de um divisor de tensão com condensador para compensação quando a tensão de entrada é rectangular: (a) divisor compensado; (b) divisor sobrecompensado; (c) divisor subcompensado.
Quando essa tensão reproduz, à parte um factor de escala, a forma de tensão de entrada, o divisor está compensado
(Figura 1.11 (a)). Se os patamares de
u2 são atingidos por valores superiores (em módulo) (Figura 1.11 (b)) o divisor
está sobrecompensado, estando subcompensado no caso oposto (Figura 1.11 (c)). A explicação para este
comportamento passa pela análise da relação
u2 u1 no domínio do tempo.
Sondas atenuadoras de tensão
Um caso particular dos divisores, também designados por atenuadores de tensão compensados, são as chamadas
sondas atenuadoras de tensão vulgarmente utilizadas para acoplar, com atenuação, uma tensão eléctrica a um
instrumento de medida, nomeadamente a um osciloscópio. A Figura 1.12 representa o esquema eléctrico de uma tal
sonda.
Trata-se apenas de uma resistência em paralelo com um condensador ajustável, uma vez que o outro ramo RC
paralelo representado na Figura 1.10 (R2C2 ) é materializado pela impedância de entrada do instrumento ao qual se
liga a sonda (Re Ce ) , na Figura 1.12). Actualmente, e como se referiu anteriormente, esta impedância está
praticamente normalizada sendo Re � 1 M� e Ce � ��5, 35�� pF . Por tal facto R1 é fixo – por exemplo para uma
sonda atenuadora de 10� o seu valor será de 9 M� – e C1 é ajustável entre, tipicamente 1 e 10 pF. A normalização
da impedância de entrada dos instrumentos tem, entre outras a vantagem de permitir que uma mesma sonda seja
utilizada com diferentes instrumentos. No caso dos osciloscópios é comum estar acessível uma tensão rectangular
de 500 mV de amplitude que pode ser utilizada não só para verificar a calibração dos canais verticais do instrumento,
mas também para compensação das sondas que com ele vão ser usadas. Recorre-se ao método (b) atrás descrito,
sendo essa tensão aplicada à sonda e a tensão de saída respectiva visualizada no próprio osciloscópio.
C1
(a)
A
B
C
R1
Re
B'
A'
(b)
Ce
C'
Figura 1.12: Sonda de osciloscópio: (a) terminal para captação do sinal (A “garra” está recolhida no interior);(b) terminal ligado à blindagem (trança do cabo). Os terminais BB' são ligados ao instrumento de medida materializada pela sua impedância de entrada R e Ce , enquanto que aos terminais AA' é aplicada a tensão a medir.
1.3
OSCILOSCÓPIO DIGITAL (OD)
A crescente utilização de instrumentos de medição ditos digitais, isto é, que na sua estrutura interna utilizam
conversores analógico-digitais, fez-se sentir também a nível da oscilografia. De facto, hoje em dia, a procura de
osciloscópios digitais é muito superior à procura de osciloscópios analógicos. Tal facto deve-se às maiores
capacidades de visualização, mas sobretudo de medição, dos primeiros. Essa capacidade resulta do facto dos
osciloscópios digitais possuírem internamente capacidade de cálculo uma vez que incorporam um unidade de
processamento (CPU) e memória digital.
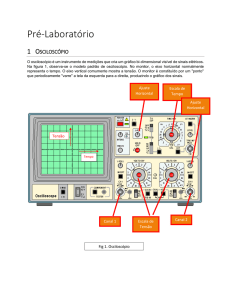
A Figura 1.13 representa um diagrama de blocos simplificado de um osciloscópio digital.
Visor
Sistema de Aquisição
Canal vertical
Atenuador
CPU
Conversor
A/D
Amplificador
Memória
Sistema de
Visualização
Digital
Base de Tempo
Sistema de
Disparo
Relógio de
amostragem
Figura 1.13: Osciloscópio digital.
Como se pode constatar, e embora possuindo um canal vertical e um sistema de disparo semelhantes aos de um
osciloscópio analógico de tempo real, o funcionamento, e por isso a constituição, de um osciloscópio digital são
radicalmente diferentes da de um OATR. De facto, enquanto que num OATR a tensão a visualizar produz
directamente o desvio vertical de um feixe electrónico, no caso de um OD a tensão de entrada é amostrada e
digitalizada em determinados instantes de tempo, sendo a informação assim obtida processada posteriormente para
poder ser apresentada num visor. Assim sendo, a dita base de tempo de um OD é constituída pelo conjunto de
circuitos que controlam os instantes em que a tensão de entrada é digitalizada e guardada em memória.
Também o visor de um OD é tipicamente diferente do de um OATR; enquanto o destes é do tipo vectores, isto é, o
ponto visualizado é a extremidade de um vector cujas componentes são as tensões de desvio horizontal e de desvio
vertical, o dos OD é do tipo varrimento (raster): a área do alvo é varrida por um feixe electrónico por linhas, do topo
superior esquerdo para o inferior direito, sendo a intensidade desse feixe modulada sim-não por um sinal produzido a
partir da informação em memória.
Tratando-se de um instrumento que utiliza amostragem, importa ter presente os aspectos relacionados com a teoria
da amostragem e com as técnicas de implementação de amostragem para se compreender bem o funcionamento, o
modo de operar e os critérios de selecção de um OD. Uma vez que o sinal é digitalizado, importa ainda ter em
consideração as características e limitações dos diferentes tipos de conversores analógico-digitais e as
consequências da sua integração neste tipo de instrumento. Todos esses aspectos estão, no entanto, fora do
contexto deste texto introdutório à oscilografia digital.
1.3.1
Utilização de um osciloscópio digital
Actualmente, a maioria dos osciloscópios digitais é provida de uma interface com o utilizador que apresenta muitas
semelhanças com a de um osciloscópio analógico. Assim, num OD, e do ponto de vista do utilizador, os comandos
do canal vertical, da base de tempo e do disparador produzem sobre o sinal visualizado o efeito que seria de esperar
dos seus homólogos de um OATR. Porém, e como foi dito, um OD dispõe de muitas outras funcionalidades não
existentes nos OATR, nomeadamente de medida, de auto-configuração e de comunicação com o exterior.
1.3.1.1
Funções de medida
Uma vez que existam memorizadas palavras que são suficientes para representar convenientemente o(s) sinal(is) a
visualizar e dispondo o instrumento de uma unidade com capacidade de processamento aritmético, é fácil
implementar rotinas que forneçam medidas de grandezas como o período, a amplitude, o valor eficaz, o tempo de
crescimento, intervalo de tempo entre amostras, diferença de amplitude entre amostras, tempo de crescimento,
transformada rápida de Fourier (FFT). Os comandos e operações necessárias para obter essas grandezas depende
muito de instrumento para instrumento, não sendo possível identificar uma tipologia padrão.
1.3.1.2
Auto-configuração
Julgamos não errar quando afirmamos que todos os osciloscópios digitais actuais dispõem da possibilidade de autoconfiguração. Trata-se de uma rotina, desencadeada normalmente por uma interrupção provocada pela pressão de
um botão do instrumento, que analisa os sinais à entrada dos canais verticais e, com base nessa análise, configura o
canal vertical (atenuador e acoplamento), base de tempo e disparador de modo a que os sinais sejam razoavelmente
visualizados no visor. Uma vez chegado a esse ponto, é mais fácil ao operador comandar o osciloscópio de modo a
obter uma visualização mais a seu gosto. O botão de auto-configuração é identificado de várias formas,
nomeadamente, auto scale, auto setup. Aconselha-se o leitor a identificar esse comando num OD antes do utilizar,
uma vez que ele lhe permite sair de situações de visualização incómodas.
1.3.1.3
Comunicação com o exterior
Pelo que fica dito, é fácil perceber que um osciloscópio digital é um sistema automático de aquisição de dados com
capacidade de visualização da informação sob a forma gráfica. È claro que as potencialidades instaladas no
instrumento são optimizadas se for possível comandar remotamente o instrumento e obter, também remotamente, a
informação guardada em memória. Essas capacidades conseguidas provendo o instrumento com interfaces de
comunicação normalizadas (não representadas na Figura 1.13), quer sejam do tipo série (ex: RS 232) ou paralelo
(ex: IEEE 488) e dos conectores respectivos.
1.3.2
Especificações
Devido ao seu princípio de funcionamento e constituição interna, os osciloscópios digitais incluem duas
especificações próprias: o ritmo de amostragem ou frequência de amostragem (sampling rate ou sampling frequency)
e a resolução do canal vertical.
O ritmo de amostragem, normalmente expresso em amostras/segundo, permite ter uma ideia do menor intervalo de
tempo entre amostras e também da frequência máxima do sinal de entrada que pode ser visualizado sem distorção
(teorema de Nyquist).
A resolução do canal vertical, expressa em bits, permite conhecer o número de intervalos de discretização do sinal de
entrada. O seu valor depende, naturalmente, do número de bits do conversor analógico-digital utilizado mas, também
do ruído interno do instrumento, o qual pode levar à perda de alguns bits da resolução do conversor.
No que respeita à largura de banda do instrumento, e uma vez que o ritmo de amostragem condiciona a frequência
máxima do sinal que pode ser visualizado sem distorção, ela é normalmente condicionada pelo amplificador do canal
vertical do instrumento. Assim, é normal que um OD com uma frequência máxima de 100 mega amostras/segundo
possua um canal vertical cuja largura de banda não seja superior a 50 MHz.