Universidade do Minho
Escola de Engenharia
ANDRÉ FILIPE GONÇALVES FERREIRA
LOCALIZAÇÃO 3D DENTRO DE EDIFÍCIOS
Outubro de 2012
Agradecimentos
Gostaria de agradecer ao meu orientador Professor João Monteiro, pelo tempo
disponibilizado, pelo incentivo e por todas as suas críticas e sugestões que se
demonstraram fundamentais na realização deste trabalho.
Gostaria de realçar o bom ambiente de trabalho do laboratório, o bom tempo que lá
passei e o companheirismo e entreajuda entre colegas de trabalho e amigos, em especial
o Nelson Barbosa e Duarte Fernandes.
Gostaria de agradecer aos meus pais que sempre me ajudaram e incentivaram nos
estudos e me deram todas as condições para que eu pudesse concluir com sucesso o meu
percurso académico.
Gostaria de agradecer também à minha namorada Carla Passos pela sua dedicação,
tempo despendido, apoio e paciência durante este tempo de escrita da dissertação.
Por fim, não queria deixar de agradecer a todos os meus colegas da universidade e fora
desta, que contribuíram para o meu sucesso académico.
i
ii
Resumo
Atualmente milhares de pessoas morrem ou ficam incapacitadas devido a acidentes de
trabalho, para travar este flagelo diversas medidas têm sido adotadas para proteger o
trabalhador. Contudo, existem profissões em que nem sempre é possível proteger
completamente o trabalhador, isto porque não é possível controlar o ambiente em que o
trabalhador se encontra.
Uma dessas profissões é a profissão de bombeiro, estes quando são chamados para
combater incêndios, quer estes ocorram dentro de edifícios ou nas florestas, o ambiente
que os rodeia não pode ser controlado e existem inúmeros perigos associados, tais
como: estes podem facilmente ficar cercados pelo fogo; dentro de edifícios podem
facilmente ficar desorientados, devido ao fumo; ou algum objeto pode cair em cima
destes.
Para ajudar os bombeiros na sua batalha diária contra o fogo, está a ser desenvolvido
pelo departamento de engenharia Têxtil da Universidade do Minho um protótipo de fato
bombeiro que deve ser capaz de garantir proteção, isolamento térmico, conforto e
segurança, esta a nível individual e coletivo. Para proporcionar estas características
devem ser integrados sistemas eletrónicos no fato, estes devem fornecer informações
sobre as condições de conforto (temperatura e humidade), localização, deteção de
movimento e sinais vitais. Estes dados devem ser enviados para uma estação de
controlo.
Nesta dissertação o sistema eletrónico a desenvolver é o da determinação da localização
3D do bombeiro dentro de um edifício. Assim, é efetuado um estudo sobre as diferentes
tecnologias sem fios e sobre os modelos de localização baseados na força do sinal. O
sistema é implementado recorrendo ao método de localização fingerprinting.
Palavras-chave: localização 3D, localização em edifícios, GPS, Wi-Fi, UWB, ZigBee,
modelos de propagação, fato bombeiro
iii
iv
Abstract
Nowadays thousands of people die or become disabled due to accidents at work, to halt
this scourge various measures have been taken to protect the worker. However, there are
professions where it is not always possible to completely protect the worker, because is
not possible to control the environment in which the worker is.
One of these profession is the profession of a firefighter, when they are called to fight
fires, whether they take place inside buildings or in forests, their environment cannot be
controlled, there are numerous dangers associated, such as: they can easily be
surrounded by fire; inside buildings they can easily become disoriented due to smoking,
or some object may fall upon these.
To help firefighters in their daily battle against the fire, is being developed by the
Department of Textile Engineering of University of Minho a firefighter suite prototype,
this prototype must be able to ensure protection, thermal insulation, comfort and
security, this individual or collective level. To provide these features should be
integrated electronic systems in suite, they should provide information on the conditions
of comfort (temperature and humidity), location, motion detection and vital signs. These
data must be sent to a control station.
In this dissertation the electronic system to be developed is to determine the 3D location
of the firefighter inside a building. Therefore, a study is made about the different
wireless technologies and on location models based on signal strength. The system is
implemented using the method of fingerprinting location.
Keywords: 3D location, indoor location, GPS, Wi-Fi, UWB, ZigBee, propagation
models, firefighter suite
v
vi
Índice
1
2
Introdução ................................................................................................................. 1
1.1
Motivação .......................................................................................................... 1
1.2
Objetivos ............................................................................................................ 1
1.3
Organização e Estrutura ..................................................................................... 2
Revisão das Técnicas e Principais Sistemas Existentes ........................................... 3
2.1
Resumo das Técnicas de Localização ................................................................ 3
2.2
Sistemas de Localização Exterior ...................................................................... 7
2.2.1
Global Positioning System (GPS) .............................................................. 7
2.2.2
Sistema de Localização para Telemóveis - E-911 ...................................... 8
2.3
3
Sistemas de Localização no Interior de Edifícios .............................................. 8
2.3.1
Active Badge .............................................................................................. 9
2.3.2
Active Bat ................................................................................................. 10
2.3.3
MontionStar Magnetic Tracker ................................................................ 10
2.3.4
Cricket ...................................................................................................... 11
2.3.5
In-building RADAR ................................................................................. 12
2.3.6
Easy Living ............................................................................................... 13
2.3.7
HilBall Tracker ......................................................................................... 13
2.3.8
Ubisence Location System ....................................................................... 14
Tecnologias Sem Fios ............................................................................................. 15
3.1
Classificação das Redes Sem Fios ................................................................... 15
3.1.1
Redes Sem Fios de Longa Distância (WWAN) ....................................... 16
3.1.2
Redes Sem Fios Metropolitanas (WMAN) .............................................. 17
3.1.3
Redes Sem Fios Locais (WLAN) ............................................................. 17
3.1.4
Redes Sem Fios Pessoais (WPAN) .......................................................... 18
3.2
Ultra Wideband (UWB) ................................................................................... 18
vii
3.2.1
História ..................................................................................................... 20
3.2.2
Regulamentação das Frequências e das Interferências ............................. 21
3.2.3
Formato do Pulso UWB ........................................................................... 23
3.2.4
Canais de Propagação ............................................................................... 25
3.2.5
Modulação ................................................................................................ 28
3.2.6
Vantagens e Desvantagens da Tecnologia UWB ..................................... 34
3.3
3.3.1
História ..................................................................................................... 37
3.3.2
Diferentes Padrões do Grupo de Trabalho 802.11 (ou Wi-Fi) ................. 38
3.3.3
Características e Arquitetura da Rede Wi-Fi ............................................ 39
3.3.4
Modulação ................................................................................................ 43
3.3.5
Vantagens e Desvantagens da Tecnologia Wi-Fi ..................................... 43
3.4
ZigBee .............................................................................................................. 44
3.4.1
História ..................................................................................................... 45
3.4.2
Características e Arquitetura das Redes ZigBee....................................... 45
3.4.3
Vantagens e Desvantagens da Tecnologia ZigBee ................................... 47
3.5
4
Wi-Fi (Wireless Fidelity) ................................................................................. 36
Comparação das Tecnologias Sem Fios .......................................................... 48
Modelos para Localização Indoor Baseados na Força do Sinal ............................. 51
4.1
4.1.1
Fase de Offline .......................................................................................... 52
4.1.2
Fase Online ............................................................................................... 53
4.2
viii
Modelos de Propagação Indoor ....................................................................... 54
4.2.1
Propagação Multicaminhos ...................................................................... 57
4.2.2
Modelos para as Perdas no Caminho........................................................ 58
4.2.3
Modelos para o Desvanecimento em Pequena Escala .............................. 65
4.3
5
Fingerprinting .................................................................................................. 51
Comparação dos Modelos ................................................................................ 68
Conceção e Implementação .................................................................................... 71
6
7
5.1
Requisitos do Sistema ...................................................................................... 71
5.2
Restrições do Sistema ...................................................................................... 72
5.3
Especificação de Hardware ............................................................................. 72
5.4
Especificação de Software ............................................................................... 74
5.5
Visão Global do Sistema.................................................................................. 75
5.6
Centro de Monitorização ................................................................................. 77
5.6.1
Interface com o Coordenador ................................................................... 77
5.6.2
Adicionar Entidades ao Sistema ............................................................... 80
5.6.3
Comunicação com os Users ..................................................................... 81
5.6.4
Criação do Mapa de Fingerprinting ......................................................... 83
5.6.5
Estimativa da Posição ............................................................................... 83
Testes e Resultados ................................................................................................. 85
6.1
Iniciar a Comunicação Série ............................................................................ 85
6.2
Introduzir as Coordenadas dos Routers ........................................................... 87
6.3
Visualização da Informação Referente aos Routers e Users ........................... 87
Conclusões e Trabalho Futuro ................................................................................ 91
Referências Bibliográficas .............................................................................................. 93
ix
x
Índice de Figuras
Figura 1 - Comparação das larguras de banda dos diferentes tipos de sistemas sem fios
(em cima); Princípio da sobreposição dos espectros (em baixo) [22]. ........................... 19
Figura 2 - PSD máxima permitida pela FCC indoor à esquerda e outdoor à direita [20].
........................................................................................................................................ 22
Figura 3 - A FCC definiu um sinal UWB como um sinal que possuí uma largura de
banda, no ponto de 10 dB de atenuação (90% da potência espectral da largura de
banda), maior que 20% da frequência modulada [23]. ................................................... 23
Figura 4 - A largura de banda de um sinal no domínio das frequências é inversamente
proporcional à largura do impulso no domínio das frequências [23]. ............................ 24
Figura 5 - Impulsos Gaussianos que são frequentemente utilizados nos sinais UWB. A
forma mais simples de impulso Gaussiano (Gaussian Monopulse) só serve como
referência, uma vez que esta induz uma componente DC ao sistema [23]. ................... 25
Figura 6 - O princípio da modulação OFDM: (a) implementação analógica e (b)
implementação digital [28]. ............................................................................................ 32
Figura 7 - Acesso múltiplo ao meio com utilizadores síncronos e assíncronos, utilizando
modulação por saltos de frequência [28]. ....................................................................... 33
Figura 8- Modelo OSI [42]. ............................................................................................ 37
Figura 9 – Camadas do modelo OSI que diferencia as comunicações sem fios da
Ethernet, exemplo para o padrão 802.11 [45]. ............................................................... 40
Figura 10 - Representação de uma rede Wi-Fi de infraestrutura [45]. ........................... 41
Figura 11 - Representação de um sistema Wi-Fi distribuído [47].................................. 41
Figura 12 - Representação de uma rede Wi-Fi ad hoc [45]............................................ 42
Figura 13 - Arquitetura da pilha protocolar ZigBee [50]. .............................................. 46
Figura 14 - Topologias possíveis da rede ZigBee [51]. .................................................. 47
Figura 15 - Mapa de Fingerprinting [55]. ....................................................................... 53
Figura 16 - Ilustração do perfil de atraso da potência recebida típico e definição dos
parâmetros de atraso [54]. .............................................................................................. 56
Figura 17 - Diagrama da Raven. ..................................................................................... 73
Figura 18 - Arquitetura da pilha protocolar do BitCloud [91]. ...................................... 73
Figura 19 - Funcionalidades do sistema do ponto de vista do monitor. ......................... 74
Figura 20 - Funcionalidades suportadas pelo posto de monitorização. .......................... 75
xi
Figura 21 - Visão global do sistema. .............................................................................. 76
Figura 22 - Fluxograma da inicialização da porta série. ................................................ 78
Figura 23 - Algoritmo para a descodificação dos dados recebidos pela porta série. ...... 79
Figura 24 - Processamento das tramas recebidas pela porta série, e identificação dos
respetivos dispositivos. ................................................................................................... 80
Figura 25 - Rotina que permite verificar se existe algum router sem coordenadas
atribuídas. ....................................................................................................................... 81
Figura 26 - Rotina para fazer pedidos ao dispositivo user. ............................................ 82
Figura 27 - Rotina para o envio da informação referente aos parâmetros do user. ........ 82
Figura 28 - Atualização da base de dados. ..................................................................... 83
Figura 29 - Rotina que realiza o cálculo da posição do utilizador. ................................ 84
Figura 30 - Form da inicialização da comunicação série. .............................................. 85
Figura 31 - Resultado dos dados recebidos pela porta série, já com a etapa da
descodificação realizada. ................................................................................................ 86
Figura 32 - Form que permite a introdução da posição do router. ................................. 87
Figura 33 - Form de visualização da informação referente aos routers. ........................ 89
Figura 34 - Form de visualização da informação referente aos users. ........................... 89
xii
Índice de Tabelas
Tabela 1 - Comparação dos diferentes padrões 802.11. ................................................. 39
Tabela 2 - Comparação das diferentes tecnologias sem fios, adaptado de [22]. ............ 49
xiii
xiv
Lista de Acrónimos e Siglas
ANN – Artificial Neural Network
AP – Access Point
APL – Application Layer
ASCII – American Standard Code for Information Interchange
BPSK - Binary Phase-Shift Keying
BSS – Basic Service Set
BSSID – Basic Service Set Identifier
BW – WideBand
CDMA – Code Division Multiple Access
CDMA - Code-Division Multiple Access
CDPD – Cellular Digital Packet Data
CPU – Central Processing Unit
CTS – Clear To Send
DC –Direct Current
DS–CDMA – Direct Sequence - Code-Division Multiple Access
DSSS – Direct-Sequence Spread Spectrum
DTOA - Difference in time of flight
EIRP – Effective Isotropic Radiated Power
ESS – Extended Service Set
ESSID – Extended Service Set Identifier
FAF- Floor Attenuation Factor
FCC – Federal Commission Communication
FDTD – Finite-Difference Time-Domain
FH – Frequency Hopping
FHSS – Frequency-Hopping Spread Spectrum
GO – Geometrical Optics
GPS – Global Positioning System
GSM – Global System for Mobile
GTD – Geometrical Theory of Diffraction
IBSS – Independent Basic Service Set
IEEE – Institute of Electrical and Electronics Engineers
IETF - Internet Engineering Task Force
xv
IFFT – Inverse Fast Fourier Transform
ISI – Inter Symbol Interference
ITU – International Telecommunications Union
LAN – Local Area Network
LEDs – Light Emission Diode
LLC - Logical Link Control
LOS – Line Of Sight
MAC - Media Access Control
MF – Mapa de Fingerprinting
MoM – Method of Moments
NWK – Network
OFDM - Orthogonal Frequency-Division Multiplexing
OFDM - Orthogonal Frequency-Division Multiplexing
OSI – Open System Interconnection
PAM – Pulse Amplitude Modulation
PDA – Personal Digital Assistant
PHY – Physical
PMM – Periodic Moment Method
PPM – Pulse Position Modulation
PSD – Power Spectral Density
RBF – Radial Base Functions
RF – Radio Frequency
RMS – Root Mean Square
RSSI – Received Signal Strength Indicator
RTS – Request To Send
SNR – Sinal – Noise Ratio
SSID – Service Set Identifier
TH-IR – Time Hopping Impulse Radio
USB – Universal Serial Bus
UTD – Uniform Theory of Diffraction
UWB – Ultra WideBand
WAF – Wall Attenuation Factor
WECA - Wireless Ethernet Compatibility Alliance
WECA - Wireless Ethernet Compatibility Alliance
WLAN – Wireless Local Area Network
xvi
WMAN – Wireless Metropolitan Area Network
WPAN – Wireless Personal Area Network
WPA2 – Wi-Fi Protected Access 2
WSSUS - Wide-Sense Stationary Uncorrelated Scattering
WWAN – Wireless Wide Area Network
xvii
xviii
1 Introdução
1.1 Motivação
Desde as primeiras civilizações sempre existiu uma enorme preocupação em saber onde
estavam as pessoas bem como bens/objetos importantes. Durante as guerras um fator
determinante no sucesso da batalha era localizar as tropas inimigas para verificar a sua
posição em relação às tropas aliadas, para melhor preparar o ataque, por outro lado era
muito importante para os comerciantes localizar as suas mercadorias para permitir que
se os piratas ou os ladrões as roubassem estes conseguissem rastreá-las e recuperá-las.
Por outro lado, saber onde está uma pessoa a um determinado instante pode ser um fator
chave para salvar essa mesma pessoa, por exemplo quando um bombeiro entra num
edifício em chamas para tentar apagar o incêndio e/ou salvar pessoas, este pode
facilmente ficar desorientado no meio do fumo, ou algum objeto pode cair e prender o
bombeiro, então para que outros bombeiros o possam socorrer é fundamental que estes
tenham acesso à informação sobre a sua localização, podendo deste modo orientar o
bombeiro ou enviar uma equipa para o resgatar.
Com o desenvolvimento das novas tecnologias tornou-se possível localizar pessoas e
bens tanto dentro do edifício como fora deste. Contudo existe uma lacuna nos sistemas
já desenvolvidos, uma vez que quando um bombeiro entra num edifício em chamas este
não pode aceder à energia elétrica do edifício e consequentemente não pode aceder à
rede desse mesmo edifício. Neste caso, e devido à ineficiência dos sistemas de
localização exterior (como por exemplo o GPS) em localizar pessoas e bens dentro de
edifícios, uma vez que o sinal de radio frequência não é forte o suficiente para
atravessar paredes, e os sistemas tradicionais de localização interior não podem ser
utilizados devido à falta de energia e de rede torna-se necessário criar uma alternativa a
estes sistemas.
1.2 Objetivos
O principal objetivo desta dissertação de mestrado passa por estudar as diversas
tecnologias existentes e selecionar uma, para conceber um sistema de localização 3D
1
Introdução
Organização e Estrutura
portátil, que não dependa nem da energia elétrica nem da rede do edifício, e que seja
capaz de monitorizar a posição do utilizador. Preferencialmente o sistema será
composto por dois módulos distintos, o módulo que o utilizador irá transportar e outro
(na realidade são no mínimo três, mas a constituição deles é a mesma) que será
colocado previsivelmente no exterior do edifício (devido às limitações que as
tecnologias apresentam em atravessar as paredes pode ser necessário conceber um
módulo que será colocado nas paredes do interior do edifício tendo como objetivo criar
uma rede ad hoc).
Neste sentido os principais objetivos deste trabalho são:
1. Fazer uma revisão da literatura sobre as diversas técnicas de localização,
quer seja dentro ou fora de edifícios, começando pelo estado da arte
versando as diversas tecnologias, as técnicas de calculo da distância e os
diversos sistemas já desenvolvidos.
2. Determinação de um sistema de coordenadas.
3.
Determinação da localização 3D do utilizador, a partir da tecnologia de
comunicação sem fios e fazendo a triangulação com o sistema de
coordenadas.
4.
Desenvolvimento de um módulo que integre o microcontrolador, o recetor
(tecnologia a selecionar), e a tecnologia de comunicação sem fios e o
desenvolvimento de um módulo que seja responsável por efetuar o eco.
5.
Desenvolvimento de uma interface para monitorizar no exterior do edifício a
posição do utilizador dentro do edifício.
1.3 Organização e Estrutura
Esta dissertação apresenta a seguinte estrutura: No capítulo 2 faz-se uma revisão às
técnicas utilizadas para a localização e os principais sistemas existentes de localização
indoor e outdoor, seguidamente, no capítulo 3 abordam-se as principais tecnologias de
comunicação sem fios, nomeadamente, UWB, Wi-Fi e ZigBee. No capítulo 4 faz-se
uma revisão aos modelos de localização baseados na força de sinal. O capítulo 5 trata a
conceção e implementação do sistema de localização, encontrando-se os testes e
resultados obtidos resultante desta implementação, no capítulo 6. Por fim o capítulo 7
apresenta as principais conclusões e trabalho futuro.
2
2
Revisão das Técnicas e Principais Sistemas Existentes
Um sistema de localização fornece a localização atual de um utilizador/objeto dentro de
um dado sistema de coordenadas. Para o cálculo da localização existem três técnicas
principais, que são: a triangulação; análise do cenário; e a proximidade. Os sistemas de
localização podem utilizar estas técnicas individualmente ou utilizar uma combinação
das mesmas para calcular a posição do utilizador/objeto.
Neste capítulo é efetuada uma análise dos vários sistemas de localização existentes bem
como as técnicas utilizadas para estimar a posição. Na secção 2.1 estão representadas as
diferentes técnicas que são utilizadas nos sistemas de localização. Na secção 2.2 são
estudados os diferentes sistemas de localização exterior existentes. Na secção 2.3 são
estudados os diferentes sistemas de localização no interior de edifícios existentes.
2.1 Resumo das Técnicas de Localização
Em seguida está uma breve explicação das técnicas utilizadas para determinar a posição
[1].
1. Triangulação. A técnica da triangulação utiliza as propriedades geométricas dos
triângulos para determinar a posição dos utilizadores/objetos. A triangulação é
dividida em duas subcategorias, a lateration e a angulação, na primeira são
utilizadas as distâncias medidas, enquanto na segunda são utilizados
essencialmente ângulos.
Lateration: a técnica lateration calcula a posição de um utilizador/objeto
através de distâncias medidas em relação a diferentes pontos de
referência. Para calcular a posição de um objeto a duas dimensões são
necessárias três medições de leitores não colineares, por outro lado, se se
pretende calcular a posição do utilizador/objeto a três dimensões são
necessárias quatro medições de leitores não complanares. Em muitos dos
sistemas desenvolvidos, quando se pretende determinar a posição do
utilizador/objeto a três dimensões, são necessárias apenas três medições,
isto porque estes sistemas aproveitam o facto de os leitores estarem
3
Revisão das Técnicas e Principais Sistemas Existentes
Resumo das Técnicas de Localização
sempre por cima do utilizador/objeto, uma vez que os leitores são
colocados no teto do edifício.
Angulação: a técnica angulação é bastante semelhante à técnica
lateration, mas ao contrário desta utiliza ângulos em vez de distâncias
para determinar a posição do utilizador/objeto. Nesta técnica quando se
pretende determinar a posição do utilizador/objeto a duas dimensões são
necessárias duas medidas de ângulos e um comprimento, comprimento
esse que é normalmente a distância entre dois pontos de referência
(leitores). No caso do cálculo a três dimensões, para além das já referidas
é necessária uma medição do azimute.
2. Análise do cenário. Nesta abordagem são utilizadas características imutáveis do
cenário observado, a partir de um ponto privilegiado de observação para que o
sistema possa retirar conclusões. Estas características por norma são formas
facilmente identificáveis pelo sistema. Sabendo a distância real a que estas se
encontram o sistema calcula o utilizador/objeto por comparação com estes
pontos conhecido. Na análise de um cenário estático, as características
observadas são procuradas em um conjunto de dados pré-definidos que os
mapeia com as localizações do utilizador/objeto. Em contraste, na análise do
cenário diferencial as diferenças entre as cenas sucessivas são utilizadas para
estimar a posição do utilizador/objeto. Assim, as diferenças no cenário vão
corresponder ao movimento do utilizador/objeto, e se no cenário existirem
pontos de referência cuja posição é conhecida, é possível calcular a posição do
utilizador/objeto em relação a esses pontos.
A técnica de análise de cenários apresenta como principais vantagens o facto de
a determinação da posição do utilizador/objeto ser passiva e as características
não são ângulos ou distâncias. Como desvantagem desta técnica é que é
necessário ter acesso aos pontos de referência do ambiente, através dos quais
vão ser comparadas as diferentes cenas. Além disso, mudanças no ambiente que
alterem os pontos de referência do cenário, pode levar a uma reconstrução do
conjunto de dados pré-definidos. As duas principais técnicas de análise do
cenário são: fingerprinting e análise de imagens.
4
Revisão das Técnicas e Principais Sistemas Existentes
Resumo das Técnicas de Localização
3. Proximidade. A técnica de localização por proximidade implica que é preciso
determinar quando é que um objeto está próximo de um ponto conhecido. A
presença do objeto é sentida através de um fenómeno físico com alcance
limitado. As três abordagens que normalmente são utilizadas são: deteção de
contato físico; monitoramento dos pontos de acesso sem fios de telemóveis; e
observar os sistemas automáticos de ID.
Técnicas de medição da distância
Das técnicas de localização referidas, a que mais se adequa para o problema abordado
nesta dissertação é a triangulação, mais concretamente a técnica lateration. Na técnica
lateration são necessárias medições das distâncias entre o utilizador/objeto e o leitor,
para determinar essa distância existem quatro abordagens principais [1].
Medição Direta. A técnica de medição direta da distância utiliza ações físicas
ou movimentos. Por exemplo, um robô pode estender o seu braço até tocar num
objeto sólido ou tirando medidas com uma fita métrica. As medições diretas são
fáceis de compreender mas muito difíceis de implementar, devido à
complexidade de coordenar o movimento físico em robôs autónomos.
Time of Flight. Nesta técnica é medido o tempo que demora a percorrer um
determinado percurso a uma velocidade conhecida. Esta técnica pode ser
utilizada para localizar utilizadores/objetos móveis ou estacionários, desde que a
sua velocidade seja conhecida num dado intervalo de tempo. Nesta técnica é
possível utilizar a luz ou sinais de rádio como sinal a enviar, mas a utilização da
luz vai requerer relógios com uma resolução muito maior (numa ordem seis
vezes superior), uma vez que a velocidade da luz é muito superior à velocidade
do som. Dependendo das características do objeto ou do recetor, pode ser
necessário calcular o tempo de atraso de ida e volta, que corresponde a duas
vezes a distância. Um dos grandes desafios desta técnica consiste em ignorar os
sinais que chegam ao recetor por via indireta devidos às reflexões do sinal, uma
vez que estes sinais, na perspetiva do recetor, são iguais. Existem sistemas que
eliminam este problema através da agregação de vários recetores e observando
as propriedades refletivas do ambiente.
Um outro problema quando se utiliza a técnica time of flight para realizar
medições das distâncias é a concordância do tempo. Por exemplo, em sistemas
5
Revisão das Técnicas e Principais Sistemas Existentes
Resumo das Técnicas de Localização
que só necessitam de uma medição não existe este problema pois o emissor é o
mesmo que o recetor e como tal o relógio é o mesmo, logo é fácil manter a
precisão das medições. Por outro lado, quando se necessitam de várias
medições, como no caso do sistema GPS, é essencial o sincronismo entre o
emissor e o recetor. No caso do sistema GPS é impossível sincronizar os
emissores com os recetores, por isso a estratégia é ligeiramente diferente e
consiste em ter os vários satélites sincronizados e utilizar uma variação da
técnica time os flight que é a técnica difference in time of flight.
Difference in time of flight (DTOA). Um dos grandes desafios desta técnica
consiste em ignorar os sinais que chegam ao recetor por via indireta devidos às
reflexões do sinal, uma vez que estes sinais, na perspetiva do recetor, são iguais.
Existem sistemas que eliminam este problema através da agregação de vários
recetores e observando as propriedades refletivas do ambiente.
Um outro problema quando se utiliza a técnica time of flight para realizar
medições das distâncias é a concordância do tempo. Por exemplo, em sistemas
que só necessitam de uma medição não existe este problema pois o emissor é o
mesmo que o recetor e como tal o relógio é o mesmo, logo é fácil manter a
precisão das medições. Por outro lado, quando se necessitam de várias
medições, como no caso do sistema GPS, é essencial o sincronismo entre o
emissor e o recetor. No caso do sistema GPS é impossível sincronizar os
emissores com os recetores, por isso a estratégia é ligeiramente diferente e
consiste em ter os vários satélites sincronizados e utilizar uma variação da
técnica time of flight que é a técnica difference in time of flight.
1
Atenuação. À medida que um sinal se propaga no meio, a distância em relação
ao emissor aumenta, fazendo com que a intensidade do sinal vá diminuindo
progressivamente. A diminuição da força deste sinal quando comparado com o
sinal original é a atenuação. Se para um determinado tipo de emissor, existir
uma função que relaciona o decréscimo da intensidade do sinal, relativamente ao
sinal original, torna-se possível estimar a distância de um utilizador/objeto a um
determinado ponto através da medição da intensidade do sinal quando atinge
6
Revisão das Técnicas e Principais Sistemas Existentes
Sistemas de Localização Exterior
esse ponto. Por exemplo, um sinal de rádio emitido em espaço livre vai ser
atenuado à razão de 1/r2 quando este atingir o recetor, em que r é a distância
entre o emissor e o recetor.
Em ambientes com muitos obstáculos, a medição da distância utilizando a
técnica de atenuação do sinal é geralmente menos precisa que a técnica time of
flight. A precisão desta técnica é bastante afetada pelos problemas relativos à
propagação de sinais, tais como: reflexão; refração; e a possibilidade de um sinal
atingir o recetor através de vários caminhos. Assim, esta técnica não é uma
técnica muito boa para determinar distâncias, uma vez que o cálculo destas é
baseado em estimativas imprecisas, o que geralmente resulta em medições de
distâncias imprecisas.
2.2 Sistemas de Localização Exterior
Os sistemas de localização exterior são de longe os sistemas mais utilizados e as suas
aplicações vão desde a aviação, navegação marítima, navegação militar e civil. Neste
subcapítulo vão ser abordados os sistemas mais importantes na localização exterior
vocacionados para calcular a posição de um utilizador. Assim sendo, sistemas como
SONAR,VOR [2], LORAN, RADAR, entre outros, não vão ser abordados uma vez que
estes sistemas utilizam como técnica principal de localização o sinal refletido pelo
objeto, que para o caso em estudo não se adequa.
2.2.1 Global Positioning System (GPS)
O sistema de posicionamento global (GPS) utiliza uma rede de satélites sincronizados,
que periodicamente transmitem sinais de posicionamento [3]. Os sensores de GPS
recebem os sinais de quatro ou mais satélites simultaneamente através de canais
ortogonais de RF. Os sinais de posicionamento são codificados de forma a permitir que
o recetor possa deduzir o tempo de offset entre cada par de sinais sincronizados. Por
outro lado as orbitas destes satélites também podem ser facilmente previstas, com isso é
possível calcular a posição do satélite num determinado instante. Conhecendo a posição
dos satélites e três ou mais valores do tempo de offset é possível calcular a posição do
recetor de GPS por triangulação. Existem recetores de GPS que possuem sensores
inerciais para fornecer a monitorização contínua da posição de objetos móveis, entre a
atualização do posicionamento do GPS. Com este sistema é possível obter uma precisão
7
Revisão das Técnicas e Principais Sistemas Existentes
Sistemas de Localização no Interior de Edifícios
da localização com poucos metros de erro, para ambientes ao ar livre. Contudo, em
ambientes fechados este sistema não funciona corretamente, uma vez que o sinal RF que
o satélite envia não é forte o suficiente para atravessar as paredes dos edifícios, sendo
atenuado e refletido por objetos metálicos [4].
2.2.2 Sistema de Localização para Telemóveis - E-911
A Comissão Federal de Comunicações (FCC) dos Estados Unidos através da diretoria
E-911 [5] exige que as operadoras de telemóveis sejam capazes de fornecer a
localização dos seus clientes, sempre que estes marquem o 911. Por si só o E-911 não é
considerado um sistema de localização, mas agregada a esta diretiva surgiram muitas
empresas a desenvolver sistemas de localização para telemóveis, tornando por isso esta
diretiva uma medida importante para o desenvolvimento da área de localização.
Esta iniciativa foi aproveitada pelas empresas para fornecer serviços complementares ao
E-911. Assim estas empresas, com base na posição do telemóvel do utilizador, podem
fornecer informações sobre o posto de gasolina mais próximo, cinemas, autocarros,
caixas multibanco, entre outros serviços. Recolhendo informações de vários utilizadores
é possível fornecer serviços bastante mais complexos e uteis como por exemplo o
congestionamento de trânsito numa determinada área.
Para cumprir os objetivos da diretoria E-911, algumas operadoras optaram por equipar
os seus telemóveis com recetor GPS, enquanto outras optaram por utilizar informações
recolhidas a partir da rede de telemóveis. A abordagem baseada na rede de telemóveis
utiliza uma combinação da técnica time of flight e o ângulo de chegada dos sinais do
telemóvel na antena de telemóveis parta calcular a posição do utilizador. O ângulo de
chegada é obtido pela comparação entre as diferentes intensidades do sinal recebido
pelas diferentes antenas de telemóveis dos operadores de comunicações móveis.
Contudo esta abordagem tem sérias limitações em Portugal, devido há legislação de
proteção da privacidade do utilizador. Contudo, a diretiva E-911 é um contributo
importante para a área de localização.
2.3 Sistemas de Localização no Interior de Edifícios
Os sistemas tradicionais de localização exterior como o GPS, etc. apresentam um erro
no cálculo da posição na ordem dos metros, o que para a generalidade das suas
8
Revisão das Técnicas e Principais Sistemas Existentes
Sistemas de Localização no Interior de Edifícios
aplicações é satisfatório. Contudo, quando tentamos utilizar estes sistemas para efetuar a
localização dentro de edifícios os resultados obtidos são bastante insatisfatórios, devido
às paredes dos edifícios e a dificuldade que os sinais de RF têm em atravessar estas, por
outro lado a exatidão destes sistemas pode não ser suficiente para a aplicação em causa.
Por outro lado, as aplicações que requerem uma localização no interior de um edifício
requerem uma pequena área de cobertura, quando comparado com a localização
exterior, normalmente esta localização só é efetuada dentro de um determinado edifício.
Neste sentido diversos sistemas foram desenvolvidos para colmatar esta necessidade da
localização dentro de edifícios.
2.3.1 Active Badge
É o primeiro e indiscutivelmente a referência nos sistemas de localização indoor, o
sistema de localização Active Badge, que foi desenvolvido no Laboratório de Pesquisa
Olivetti, agora AT&T Cambridge [6], consiste num sistema de proximidade celular que
utiliza a tecnologia de infravermelho difuso. Para que um utilizador/objeto possa ser
localizado pelo sistema este precisa de transportar um pequeno dispositivo
infravermelho. Este dispositivo emite um identificador único a cada 10 segundos ou a
pedido. O servidor central recolhe os dados dos sensores de infravermelhos fixos que
estão distribuídos pelo edifício, agrega-os, e fornece uma aplicação de interface para
utilizar os dados.
O sistema Active Badge faculta a informação relativa à localização absoluta. A
localização dos leitores é simbólica, representando, por exemplo salas em que o leitor
está localizado. O grupo de pesquisa de Cambridge também foi pioneiro em
desenvolver uma arquitetura de software para lidar com o tipo de dados de
representação simbólica.
Como qualquer sistema que utiliza a tecnologia de infravermelho difuso, Active Badges
apresenta problemas na determinação da localização em locais com luz florescente ou
luz solar direta, devido há componente infravermelha que estes tipos de iluminação
geram, causando interferências com o sistema. O infravermelho difuso tem um alcance
de vários metros, limitando desta forma o tamanho da divisão. Quando se pretende
implementar este sistema em divisórias grandes é necessário utilizar vários sinalizadores
de infravermelho.
9
Revisão das Técnicas e Principais Sistemas Existentes
Sistemas de Localização no Interior de Edifícios
2.3.2 Active Bat
Um trabalho mais recente do grupo de investigadores do AT&T foi o desenvolvimento
do sistema de localização Active Bat [7, 8] que utiliza a tecnologia de ultrassons e a
técnica de time of flight para melhorar a exatidão no cálculo da posição,
comparativamente com o sistema Active Badge.
Neste sistema os vários utilizadores/objetos que o constituem possuem um pequeno
transmissor sem fios, que permite ao sistema localizar estes utilizadores/objetos e
construir um banco de dados que contem a informação sobre a sua localização. O
sistema Active Bat é constituído por um conjunto de transmissores sem fios (podem ser
fixos ou móveis), uma matriz de recetores colocados no teto do edifício e uma estação
de RF central.
Quando o sistema emite um pedido via rádio, o transmissor Bat emite um pulso
ultrassónico que vai ser detetado pela matriz de recetores do teto. Ao mesmo tempo o
controlador envia o pedido por RF, ele também envia um sinal de reset sincronizado
com os sensores do teto, utilizando a rede cablada que liga os sensores de teto à central.
Cada sensor de teto mede o tempo entre o sinal de reset e a chegada do pulso
ultrassónico, depois calcula a distância entre o leitor e o transmissor Bat. Em seguida é
enviada esta informação para o controlador central que vai calcular a posição do
utilizador/objeto através do método da triangulação. Para eliminar erros devido à leitura
de pulsos de ultrassons refletidos, é utilizada uma análise estatística.
O sistema Active Bat é capaz de localizar os utilizadores/objetos com um erro circular
de 9 centímetros da sua verdadeira posição em 95% das medições. Cada transmissor Bat
tem um identificador para endereçar os pedidos e para o seu reconhecimento.
Contudo esta técnica requer uma infraestrutura de sensores colocados no teto muito
grande e o desempenho do sistema está muito dependente da colocação precisa destes
sensores no teto. Assim, a escalabilidade, a dificuldade de implementação e o custo são
as desvantagens desta abordagem.
2.3.3 MontionStar Magnetic Tracker
O MontionStar magnetic tracker foi desenvolvido pelo Ascension Technology
Corporation [9, 10].
10
Revisão das Técnicas e Principais Sistemas Existentes
Sistemas de Localização no Interior de Edifícios
Os sensores eletromagnéticos fornecem um método clássico na localização de
utilizadores/objetos. Contudo esta tecnologia continua muito atual pois é utilizada em
pesquisas e produtos que suportam a realidade virtual e de captura de movimentos para
a animação por computador.
Estes sistemas de localização geram pulsos de campo magnético DC a partir de uma
antena de transmissão fixa localizada num determinado local. O sistema calcula a
posição e a orientação das antenas de receção com base na medição da resposta dos três
eixos ortogonais ao pulso eletromagnético recebido, este é combinado com o efeito
constante do campo magnético da Terra.
Nestes sistemas de localização o sistema precisa das coordenadas físicas em relação à
antena de transmissão eletromagnética. Estes sistemas têm como principais vantagens: a
elevada precisão e exatidão, na ordem de menos de 1 milímetro de resolução espacial,
uma resolução temporal de 1 milissegundo, e uma capacidade de orientação de cerca de
0,1. Como principais desvantagens deste sistema temos: o custo de implementação
elevado, a necessidade de o utilizador/objeto a localizar ter uma unidade de controlo; os
sensores devem permanecer dentro de 1 a 3 metros do transmissor; e a precisão diminui
consideravelmente na presença de objetos metálicos.
2.3.4 Cricket
O sistema de apoio à localização Cricket utiliza emissores de ultrassons para criar a
infraestrutura de emissores no teto e recetores de ultrassons incorporados no
utilizador/objeto que vai ser localizado [11]. No entanto, esta abordagem implica que os
cálculos de triangulação têm de ser efetuados pelo dispositivo que é transportado pelo
utilizador/objeto. O sistema Cricket utiliza os sinais de RF não só para a sincronização
da medição do tempo de propagação do pulso de ultrassom, mas também para delimitar
o intervalo de tempo durante o qual o recetor deve considerar válidos os pulsos de
ultrassons recebidos. Deste modo, o sistema pode identificar os sinais de ultrassons
recebidos depois do sinal de RF ter acabado como sendo reflexos e assim ignora-los.
Um algoritmo aleatório permite a coexistência de vários beacons descoordenados no
mesmo espaço. Cada beacon envia uma sequência de dados que descreve a semântica
das áreas que delimita a utilização de sinais de rádio de curto alcance.
Tal como no sistema Active Bat, o sistema Cricket utiliza a tecnologia de ultrassons, a
técnica de time of flight e um sinal de controlo enviado por rádio frequência, contudo
11
Revisão das Técnicas e Principais Sistemas Existentes
Sistemas de Localização no Interior de Edifícios
neste sistema não é necessária a matriz de sensores colocados no teto com locais fixos,
uma vez que são os recetores móveis que executam a contagem do tempo de propagação
do pulso de ultrassons e realizam os cálculos computacionais. Contudo o sistema
Cricket é muito menos preciso que o sistema Active Bat, uma vez que a precisão do
primeiro é de 4 metros quadrados, enquanto no segundo a precisão é de 9 centímetros.
O sistema Cricket implementa as técnicas de proximidade e de lateration. Ao receber
vários beacons permite aos recetores triangularem a sua posição. No caso de só receber
um beacon continua a fornecer informação importante sobre a sua posição, quando
combinado com a sequência de dados enviados por rádio.
As principais vantagens do sistema Cricket são: a privacidade do utilizador; e a
escalabilidade descentralizada. Por outro lado as desvantagens deste sistema são:
ausência de gerenciamento centralizado ou monitorização; e a carga computacional
(consequentemente maior consumo de energia) que a contagem do tempo de
propagação, o processamento dos pulsos de ultrassom e dos dados do sinal de RF
implicam nos recetores móveis.
2.3.5 In-building RADAR
O sistema RADAR foi desenvolvido por um grupo de investigadores da Microsoft [12],
este sistema utiliza a tecnologia de redes sem fios IEEE 802.11 WaveLAN para localizar
utilizadores/objetos dentro de edifícios. Assim, o sistema recorre a uma rede de dados já
existente no edifício para obter informações sobre a posição do utilizador/objeto. Para
calcular a distância entre o transmissor e o objeto o sistema utiliza a informação sobre a
força do sinal de RF. Esta informação é depois processada para calcular a posição do
utilizador/objeto por triangulação.
Na fase de ensaio do sistema é construída uma base de dados da intensidade do sinal de
RF em conjunto com os recetores fixos. Para construir esta base de dados, são
colocados transmissores em posições conhecidas e regista-se a intensidade do sinal de
RF juntamente com a distância a que este se encontra dos diversos recetores fixos.
Quando o sistema está em funcionamento, a força do sinal de RF emitido pelo
transmissor é medido pelo conjunto de recetores fixos e é enviado para um computador
central que vai fazer a leitura da base de dados e atribuir por comparação a posição do
transmissor em relação ao recetor em questão.
12
Revisão das Técnicas e Principais Sistemas Existentes
Sistemas de Localização no Interior de Edifícios
O sistema RADAR permite calcular a posição de um utilizador/objeto dentro de 4,3
metros da sua posição real com uma probabilidade de 50%. Este sistema apresenta duas
vantagens principais: são necessários poucos recetores e utiliza a mesma infraestrutura
de rede sem fios, de uso geral, do edifício. Como desvantagens: o utilizador/objeto que
vai ser seguido deve suportar o protocolo de redes sem fios IEEE 802.11 WaveLAN, que
pode ser impraticável em dispositivos pequenos e/ou com limitações no consumo de
energia; e utilizar esta tecnologia em edifícios com vários pisos pode causar problemas
de difícil resolução.
Existem outros sistemas comerciais que utilizam estes conceitos, tais como: WhereNet
(http://www.widata.com) e Pinpoint (http://www.pinpointco.com).
2.3.6 Easy Living
O sistema Easy Living foi desenvolvido por um grupo de investigadores da Microsoft
tem como abordagem a tecnologia de visão por computador para determinar a posição
de utilizadores/objetos [13]. O sistema Easy Living utiliza o sistema em tempo real
Digiclops com câmaras em 3D, para proporcional uma visão stereo com capacidade
para localizar utilizadores/objetos em ambientes domésticos.
Apesar do sistema Easy Living possuir câmaras de elevada desempenho, estes sistemas
de visão requerem uma grande capacidade de poder de processamento para analisar as
frames capturadas, no entanto requerem pouco hardware.
Para melhorar o desempenho destes sistemas, ou seja, aumentar a exatidão o sistema
pode tentar identificar formas como a silhueta e o padrão do rosto, ou a cor de pele.
Contudo o desempenho deste sistema pode diminuir quando a complexidade do
ambiente aumenta e a câmara é obstruída por movimento.
2.3.7 HilBall Tracker
O sistema HiBall utiliza LEDs infravermelhos sincronizados e uma ótica de precisão
para determinar a posição do utilizador/observador com uma precisão de menos de um
milímetro com um tempo de latência inferior a um milissegundo [14].
Este sistema consiste na implementação de grandes conjuntos de LEDs sinalizadores no
teto e um sofisticado sensor "bola", que é composto por seis minúsculos sensores
infravermelhos e lentes óticas. A estimativa da posição e da orientação é efetuada pela
13
Revisão das Técnicas e Principais Sistemas Existentes
Sistemas de Localização no Interior de Edifícios
análise dos ângulos e a posição relativa dos LEDs no teto. Tanto as matrizes de LEDs
como o sensor são sincronizados por um computador central para determinar a posição
do utilizador/objeto.
Apesar da elevada precisão e do bom desempenho deste sistema, ele apresenta diversas
desvantagens, tais como: a dificuldade em desenvolver um painel de LEDs para cobrir
todo o edifício; a extensa cablagem, que torna o sistema caro e de difícil
implementação; o hardware da câmara é bastante caro; e o sistema está sujeito a
interferências causadas pela luz ambiente. Contudo, pode ser uma boa solução para
aplicações específicas que necessitem de uma boa resolução e que operem em
ambientes totalmente controlados.
2.3.8 Ubisence Location System
O sistema de localização Ubisence utiliza a tecnologia Ultra WideBand (UWB) para
determinar a distância. Este sistema consiste num pequeno número de recetores e
transmissores UWB que são transportados pelo utilizador/objeto, e tem uma exatidão na
estimativa da localização de aproximadamente 15 centímetros [15,16].
Este sistema utiliza uma arquitetura em que os transmissores é que são a parte ativa do
sistema, isto porque os transmissores de UWB são significativamente mais baratos que
os recetores. Quando comparado com a tecnologia de ultrassom, a tecnologia UWB tem
um alcance melhor, uma vez que este permite fazer medições precisas mesmo quando o
utilizador/objeto está fora da linha de visão do sistema.
14
3 Tecnologias Sem Fios
Quando se pretende desenvolver um projeto de localização um dos fatores mais
importantes, senão o mais importante, a ter em consideração para a sua implementação,
passa pela seleção da tecnologia sem fios. A seleção da tecnologia é um fator crítico no
sucesso do projeto, pois cada tecnologia apresenta um comportamento específico no que
diz respeito à sua atenuação, alcance máximo que pode atingir no meio de propagação,
consumo energético, potência do sinal transmitido, entre outras característica relevantes
para a aplicação.
No presente capítulo será apresentada uma breve descrição das topologias das redes sem
fios, caracterização e comparação das tecnologias mais relevantes. Na secção 3.1 será
efetuada uma descrição da topologia das redes sem fios, nas secções 3.2, 3.3 e 3.4 será
efetuada uma descrição das tecnologias UWB, Wi-Fi e ZigBee, respetivamente. Na
secção 3.5 encontra-se a comparação entre as diferentes tecnologias.
3.1 Classificação das Redes Sem Fios
Com o desenvolvimento das tecnologias sem fios foram surgindo enumeras alternativas
e cada uma dessas alternativas surgia com um protocolo de comunicação específico, o
que impedia sistemas de diferentes fabricantes comunicar entre si. Isto representava um
grande entrave no desenvolvimento de sistemas complexos pois estavam limitados aos
produtos que um determinado fabricante dispunha, assim tornou-se uma necessidade a
uniformização dos protocolos de comunicação. Com o objetivo da padronização das
redes sem fios, diversas organizações deram o seu contributo, entre elas temos: Institute
of Electric and Electronic Engineers (IEEE), Internet Engeneering Task Force (IETF),
Wireless Ethernet Compatibility Alliance (WECA) e a International Telecommunication
Union (ITU). Das organizações anteriormente enumeradas aquela que se destaca é a
IEEE, estas organizações ao desenvolverem os padrões das redes sem fios abordam
assuntos como o gerenciamento de energia, largura de banda, segurança entre outras
especificidades das redes sem fios.
Outro entrave na utilização de dispositivos sem fios para aplicações embebidas está
relacionado com a premissa que regulava o desenvolvimento destes sistemas, estes eram
15
Tecnologias Sem Fios
Classificação das Redes Sem Fios
focados na transmissão de dados e voz com elevadas taxas de transferência. Isto fazia
com que os sistemas desenvolvidos apresentassem um custo de aquisição e um consumo
energético muito grande, o que não correspondia às necessidades das aplicações
embebidas, regra geral estas não requerem uma taxa de transferência de dados muito
elevada mas por outro lado exigem um consumo energético baixo de modo a assegurar
o tempo de vida útil das suas baterias.
Para as comunicações sem fios, o grupo de trabalho utilizado é o 802 da organização
IEEE. Este grupo de trabalho está dividido em vários grupos de trabalho, que regulam a
operação das comunicações sem fios. Do mesmo modo que as redes tradicionais, as
redes sem fios podem ser classificadas segundo a distância máxima que estas podem
atingir, neste contexto existem quatro classificações possíveis para as redes sem fios
[17]:
WPAN – wireless personal area network;
WLAN – wireless local area network;
WMAN – wireless metropolitan area network;
WWAN – wireless wide area network.
3.1.1 Redes Sem Fios de Longa Distância (WWAN)
A aplicação mais conhecida que recorre à tecnologia WWAN, para garantir as
comunicações entre diferentes utilizadores, são os telemóveis. Esta tecnologia é capaz
de assegurar a comunicação entre dois dispositivos situados em diferentes
cidades/países, para isso recorre a uma vasta rede de antenas ou em certas aplicações a
sistemas de satélites, estes serviços são assegurados por um provedor que é responsável
por garantir os serviços das redes sem fios. Atualmente este tipo de serviço está dividido
entre os sistemas de segunda geração (2G) e os sistemas de terceira geração (3G). Os
sistemas 2G incluem o sistema global para a comunicação móvel (GSM), os pacotes de
dados digitais para telemóveis (CDPD) e a divisão do código para acesso múltiplo
(CDMA). Contudo, estas redes apresentam muitas limitações, uma vez que algumas
apresentam recursos móveis muito reduzidos e são incompatíveis entre si. Em 2003
começaram a ser implementados na Europa as primeiras redes 3G, estas têm como
principais objetivos aumentar a taxa de transferência de dados, permitindo ao utilizador
enviar imagens e fazer vídeo chamadas, bem como criar um padrão global para as
comunicações móveis. Neste sentido, a União das Telecomunicações Internacional
16
Tecnologias Sem Fios
Classificação das Redes Sem Fios
(ITU) criou o padrão IMT-2000 de modo a garantir a compatibilidade entre as
diferentes redes. Recentemente começaram a surgir sistemas de quarta geração (4G).
3.1.2 Redes Sem Fios Metropolitanas (WMAN)
As redes sem fios metropolitanas surgiram devido à necessidade da redução dos custos
de instalação que as redes de cobre e de fibra requerem, adicionalmente estas redes
podem servir de backup quando as redes cabladas não estão operacionais. Assim, as
redes sem fios metropolitanas têm com objetivo permitir aos usuários estabelecer
conexões sem fios entre vários locais de uma área metropolitana, como exemplo da
utilização deste tipo de rede é a rede sem fios disponibilizada pelos campus das
universidades. Para a propagação dos dados no meio, as WMAN recorrem às ondas de
rádio ou à luz infravermelha. A padronização desta tecnologia é da responsabilidade do
grupo de trabalho IEEE 802.16.
3.1.3 Redes Sem Fios Locais (WLAN)
As tecnologias WLAN foram criadas para permitir criar pequenas redes sem fios
limitadas a uma área local, normalmente esta área é um edifício (hospital, aeroporto,
escola, por exemplo) ou um parque público. Tal como as redes WMAN, as redes
WLAN permitem uma poupança considerável nos custos de instalação, uma vez que
não requerem redes cabladas tão extensas e tornam o sistema muito mais simples.
Assim, esta é a opção ideal quando se pretende instalar uma rede provisória ou quando
as necessidades do utilizador (no que respeita à transferência de dados) não são muito
exigentes. Outra característica importante na tecnologia WLAN é que esta pode ser
configurada para permitir que se estabeleçam conexões entre o dispositivo que se
pretende ligar à rede e o ponto de acesso sem fio. Por outro lado, caso não seja
necessário utilizar os recursos da rede é possível estabelecer ligações ponto a ponto
(redes ad hoc), permitindo que os utilizadores troquem informações entre si.
O padrão do IEEE que regula as comunicações WLAN é o 802.11, inicialmente este
especificava uma taxa de transferência de dados que podia ser de 1 a 2 megabits por
segundo (Mbps). Contudo, devido à crescente necessidade de transferir pacotes de
dados cada vez maiores e em curto espaço de tempo, foram criados os padrões 802.11b
e 802.11a que permitem uma taxa máxima de transferência de dados de 11 Mbps numa
17
Tecnologias Sem Fios
Ultra Wideband (UWB)
frequência de banda de 2,4 GHz e 54 Mbps numa frequência de banda de 5 GHz,
respetivamente.
3.1.4 Redes Sem Fios Pessoais (WPAN)
As redes WPAN surgiram, devido há necessidade dos usuários em fazer trocas de
dados, sem recorrer a fios, entre os seus dispositivos eletrónicos (computadores
portáteis, smartphones, PDA’s, impressoras, câmaras fotográficas digitais, entre outros).
Estas ligações são ligações ponto a ponto (ah hoc) e geralmente os dispositivos estão
relativamente perto uns dos outros, por isso e dependendo da distância que os separa
pode-se utilizar duas
tecnologias:
Bluetooth
e infravermelhos.
Devidos
às
potencialidades do Bluetooth (utiliza ondas de rádio para transmitir a informação) este
tem sido a principal escolha para este tipo de aplicações, uma vez que permite
comunicar com dispositivos que estejam num raio de 10 metros, atravessar paredes,
tecidos e pastas. Por outro lado, os dispositivos que utilizam infravermelhos não podem
estar distanciados a uma distância superior a 1 metro e têm de estar alinhados para
garantir a troca de informação.
O grupo de trabalho 802.15 foi criado pelo IEEE para padronizar as redes WPAN e tem
como principais objetivos a baixa complexidade, o baixo consumo energético, a
interoperabilidade e coexistência com as redes 802.11.
3.2 Ultra Wideband (UWB)
Recentemente as redes WPAN têm sido alvo de grande interesse, isto porque com o
desenvolvimento de vários dispositivos eletrónicos para o consumidor (computadores
portáteis, smartphones, PDA’s, televisões de alta definição, câmaras fotográficas
digitais, câmaras de filmar, entre outros dispositivos), aliado à necessidade de dar mais
comodidade ao utilizador, torna-se necessária uma tecnologia sem fios que permita a
comunicação entre todos estes dispositivos. Isto porque as tecnologias normalmente
utilizadas nas redes WPAN, Bluetooth ou Zigbee, não estão otimizadas para a utilização
de vários modelos de grande largura de banda e não possuem uma taxa de transmissão
de dados suficiente para satisfazer as necessidades de aplicações como a transmissão de
vídeo sem fios ou transferir grandes quantidades de dados de um dispositivo de
armazenamento para outro, por exemplo. Por outro lado as tecnologias sem fios
18
Tecnologias Sem Fios
Ultra Wideband (UWB)
utilizadas nas redes WLAN têm a desvantagem da transferência de dados não
determinística, elevado consumo energético e emitem radiação eletromagnética [18,19].
A tecnologia UWB pode ser descrita como um pulso RF de curta duração, que alcança a
largura de banda mais alta possível com o centro de frequência mais baixo possível. Ao
contrário das tecnologias de bandas estreita cuja largura de banda é tipicamente 10% ou
menos do seu centro de frequência, a tecnologia UWB possuí um espetro com uma
largura de banda superior a 500MHz ou superior a 25% do seu centro de frequência
[20]. Apesar de ser uma das primeiras formas de comunicação utilizada, o seu
desenvolvimento esteve muito tempo restringindo pela legislação. Até que em 2002 a
comissão federal para as comunicações dos Estados Unidos da Améria (FCC) aprovou
uma legislação para regular esta tecnologia [21].
Com as alterações na legislação aliada ao desenvolvimento da tecnologia de comutação
de alta velocidade a tecnologia UWB apresenta-se como uma alternativa muito
promissora pois permite múltiplas transferências de dados a elevadas taxas de
transferência em simultâneo, consome pouca quantidade de energia, pode ser
incorporada em dispositivos muito pequenos e não necessita de reservar uma alocação
no espetro pois o seu funcionamento não interfere com as restantes tecnologias (Figura
1).
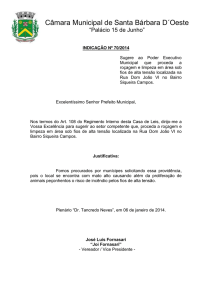
Figura 1 - Comparação das larguras de banda dos diferentes tipos de sistemas sem fios (em cima); Princípio da
sobreposição dos espectros (em baixo) [22].
19
Tecnologias Sem Fios
Ultra Wideband (UWB)
3.2.1 História
O primeiro dispositivo que integrou a comunicação por impulsos de rádio foi um
telégrafo criado por Heinrich Hertz (1888), baseado neste dispositivo Gulielmo Marconi
integrou o mesmo princípio de funcionamento nos rádios (1896) [23]. Contudo, estes
dispositivos eram muito afetados pelas interferências atmosféricas e outras fontes de
transmissão de energia/dados, pelo que foram ultrapassados pelos sistemas que
recorriam à transmissão de dados através de ondas contínuas de banda limitada, que
conseguirão maior alcance de transmissão do sinal bem como uma maior imunidade a
perturbações.
O desenvolvimento da tecnologia de comunicação por impulsos ficou estagnada durante
décadas, até que o desenvolvimento do osciloscópio de amostragem (1962) veio
permitir que a resposta ao impulso das redes de micro-ondas pudessem ser diretamente
observadas e medidas. Durante os anos 60, os estudos sobre as medições da propagação
de dados através de impulsos concluíram que esta tecnologia tinha o potencial para ser
utilizada em sistemas de radar e comunicações. Outra das limitações desta tecnologia
estava relacionado com o facto de não se saber como providenciar acesso múltiplo à
rede, até que no início dos anos 90 um trabalho pioneiro realizado por Win e Scholtz
[24–26] introduziu o conceito de impulso de rádio por tempo de salto (TH-IR), que
consiste na atribuição de tempos de transmissão aleatórios aos pulsos para diferentes
utilizadores, permitindo deste modo assegurar a coexistência de vários utilizadores na
mesma rede. Contudo, e apesar das suas potencialidades a utilização desta tecnologia foi
restringida para fins militares.
No ano de 2002 deu-se uma viragem na utilização desta tecnologia, pois a comissão
federal para as comunicações dos Estados Unidos da Améria (FCC) veio pela primeira
vez conceder uma alocação no espetro comercial não licenciada para transmissões
UWB de baixa potencia.
Devido às características únicas da tecnologia UWB esta é apontada como a solução
mais viável para satisfazer a crescente necessidade de transferência de grandes
quantidades de dados entre os dispositivos eletrónicos presentes nas casas dos
consumidores, bem como na conceção de dispositivos capazes de determinar a posição
de objetos/pessoas com elevada precisão [18–23].
20
Tecnologias Sem Fios
Ultra Wideband (UWB)
3.2.2 Regulamentação das Frequências e das Interferências
A legislação das comunicações UWB foi um fator de grande importância para a
definição da própria tecnologia, isto porque, além de permitir a utilização desta
tecnologia para fins comerciais é a legislação que confere algumas das características
mais importantes da tecnologia.
Uma das vantagens desta tecnologia, mas que também atrasou o seu desenvolvimento e
legislação, reside no facto desta poder operar no mesmo espetro de frequências das
tecnologias existentes. Esta coexistência é possível devido ao facto de a potência
transmitida por qualquer sistema poder ser definida aproximadamente como o produto
da densidade de potência espectral (PSD) e a largura de banda. Uma grande largura de
banda permite a um sistema transmitir um sinal com uma potência razoável e ao mesmo
tempo possuir uma baixa densidade de potência espectral. Deste modo, os sistemas que
operam com outras tecnologias apenas “veem” ruído que é característico à largura de
banda em que operam, que apenas representa uma pequena parte da largura de banda do
sistema UWB. Devido à baixa interferência entre os sistemas as diversas organizações
mundiais que regulam as comunicações permitem as emissões de sinais UWB no
regime de micro-ondas, que estão sujeitos a restrições para o espectro de energia com
emissões. A FCC foi a primeira organização mundial a criar regulamentos para a
utilização da tecnologia UWB em sistemas comerciais, sob a norma 15 das regras
estabelecidas pela comissão, que permite a emissão de sinais UWB sujeitos a limitações
na potência e na frequência a transmitir, com vista a minimizar a interferência devido à
partilha do espectro.
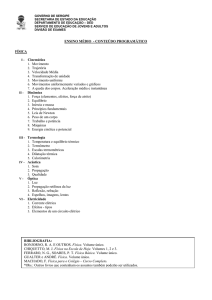
Nos Estados Unidos da América as máscaras das frequências dependem da aplicação e
do ambiente em que estes dispositivos vão operar. Para as comunicações indoor é
permitida uma PSD de -41.3 dBm/MHz na banda de frequências entre 3.1 e 10.6 GHz.
Fora deste intervalo de operação não são permitidas emissões intencionais e a PSD
admissível para as emissões ilegítimas requer uma atenção especial devido aos sistemas
GPS e serviços de telemóvel (Figura 2). Para os ambientes outdoor apenas são
permitidos sistemas móveis e alimentados por baterias. Também para estes sistemas as
emissões intencionais são permitidas na banda de frequências entre 3.1 e 10.6 GHz e a
máscara de frequências é diferente das aplicações indoor.
21
Tecnologias Sem Fios
Ultra Wideband (UWB)
As normas dos reguladores de frequência Europeu e Japonês são mais restritas. Na
gama de frequências entre os 3.4 e os 4.8 GHz, o funcionamento destes dispositivos
requer um mecanismo de deteção de sistemas que operem com outras tecnologias e caso
detete evitar a transmissão nessas frequências. Para gamas de frequência superiores (68.5 GHz na Europa e 7.25-1.25 no Japão) não é necessário utilizar o mecanismo
anteriormente referido e o sinal pode ser transmitido com uma PSD de -41.3 dBm/MHz.
Figura 2 - PSD máxima permitida pela FCC indoor à esquerda e outdoor à direita [20].
Para a regulamentação destes sistemas existiu sempre uma grande preocupação na
proteção dos sistemas existentes e se as máscaras são suficientes para garantir a
proteção destes sistemas quer a emissões intencionais quer a emissões ilegítimas.
Contudo ainda existe uma preocupação se o uso generalizado de sistemas UWB pode
levar a uma elevada interferência devido à agregação das mesmas, que levaria a um
impacto negativo no funcionamento dos sistemas existentes. Pesquisas sobre
interferência entre os sistemas indicam que sistemas UWB próximos dos outros
sistemas vão dominar o desempenho global desses sistemas [27]. Contudo, os resultados
desses estudos estão extremamente influenciados pela suposição do desvanecimento
exponencial do sinal, bem como da distribuição espacial dos emissores. Se um
dispositivo que utiliza a tecnologia UWB estiver muito próximo de outro dispositivo
que utilize outra tecnologia então é inevitável que exista uma forte interferência.
Contudo ainda não existe um consenso sobre a influência da interferência no
desempenho destes sistemas.
É de salientar que as entidades reguladoras apenas consideram a interferência que os
dispositivos UWB têm sobre os dispositivos que utilizam tecnologias de banda estreita.
Sendo que a interferência dos dispositivos de banda estreita nos UWB não está
22
Tecnologias Sem Fios
Ultra Wideband (UWB)
regulamentada e cabe aos dispositivos UWB lidar com as possíveis interferências
causadas pelos dispositivos de banda estreita [20, 28].
3.2.3 Formato do Pulso UWB
Na tecnologia UWB podem ser empregues uma ampla gama de sinais para efetuar a
comunicação, estes sinais são tão diferentes uns dos outros que a única característica
que lhes é comum é o facto de possuírem uma grande largura de banda.
Como os sinais UWB podem ser gerados de diversas formas, a FCC optou por definir a
tecnologia UWB baseando-se na largura de banda em vez do formato do sinal ou da
modulação. Assim, os sinais UWB foram definidos como sinais com uma percentagem
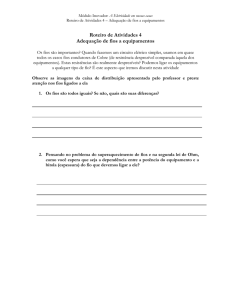
da largura de banda superior a 20% (Figura 3).
Figura 3 - A FCC definiu um sinal UWB como um sinal que possuí uma largura de banda, no ponto de 10 dB de
atenuação (90% da potência espectral da largura de banda), maior que 20% da frequência modulada [23].
O formato do pulso é importante pois este vai afetar as propriedades espectrais da
modulação UWB. Para evitar interferências com os resistentes sistemas, foram impostas
limitações na densidade de potência espectral dos sinais UWB, mas o formato da
frequência no domínio espectral está diretamente relacionado com o formato do impulso
no domínio dos tempos.
Teoricamente o impulso de Dirac, ou largura do impulso infinitamente estreita no
domínio dos tempos, cria uma resposta espectral infinitamente grande no domínio das
frequências. Através de uma cuidadosa alteração do formato do impulso é possível
23
Tecnologias Sem Fios
Ultra Wideband (UWB)
controlar a densidade de potência espectral do sinal UWB, como se pode observar na
Figura 4.
Figura 4 - A largura de banda de um sinal no domínio das frequências é inversamente proporcional à largura do
impulso no domínio das frequências [23].
O formato do pulso pode também alterar (Figura 5) a interferência entre símbolos (ISI)
e as características do multicaminho do sinal UWB. Ao contrário da maioria dos
sistemas tradicionais de banda estreita com modulação digital, que utilizam filtragem de
cosseno elevado e controlo dos tempos dos símbolos para evitar ISI, os sinais UWB
normalmente utilizam impulsos com formato Gaussiano que possuem a particularidade
de manter a sua forma quando são sujeitos aos efeitos dispersivos do canal. Contudo, os
impulsos com formato Gaussiano podem introduzir algum ISI, mas como os sinais
UWB possuem uma grande abundância de largura de banda basta ajustar a
temporização com vista a minimizar a interferência entre os símbolos.
Como já referido, o formato do espectro também é afetado pelo tipo de impulso. Por
isso, torna-se necessária uma manipulação cuidadosa da forma e da largura do impulso
de modo a selecionar impulsos que correspondam às necessidades espectrais e de ISI
[23].
24
Tecnologias Sem Fios
Ultra Wideband (UWB)
Figura 5 - Impulsos Gaussianos que são frequentemente utilizados nos sinais UWB. A forma mais simples de
impulso Gaussiano (Gaussian Monopulse) só serve como referência, uma vez que esta induz uma componente DC
ao sistema [23].
3.2.4 Canais de Propagação
Os canais de propagação UWB diferem dos canais de propagação de banda estreita em
vários aspetos fundamentais (para uma análise mais profunda ver [29–31]. Para uma
análise dos canais de propagação é bastante útil fazer uma distinção entre os canais com
uma grande largura de banda relativa e os canais com uma grande largura de banda
absoluta.
Canais com Grande Largura de Banda Absoluta:
Os canais de propagação que utilizam uma grande largura de banda absoluta permitem
transmissões de dados com taxas de transferência extremamente elevadas (> 100
Mbit/s), contudo e devido ao facto destas transmissões terem limitações na potência a
que cada bit pode ser transmitido, só é possível obter taxas de transferência de dados
elevadas para distâncias relativamente curtas (< 10 m). Por outro lado, para aplicações
que utilizem baixas taxas de transferência de dados (< 1 Mbit/s) é possível obter
distâncias muito superiores explorando o fator de ampla dispersão. Um exemplo da
aplicabilidade deste princípio é a placa de desenvolvimento da Time Domain [32], que
consegue alcances de transmissão na ordem dos 350 metros em ambientes livres de
obstáculos. Para além dos benefícios referidos, uma grande largura de banda absoluta
permite uma boa resolução na determinação do alcance, que torna muito apelativo para
25
Tecnologias Sem Fios
Ultra Wideband (UWB)
aplicações de radar ou de georreferenciação [33], introduz um elevado grau de
diversidade de frequências [34] e reduz a profundidade do desvanecimento das
componentes resolúveis dos multicaminhos [35]. Isto proporciona uma robustez ao
desvanecimento de pequena escala que é significativamente melhor que nos sistemas
convencionais de banda estreita.
Por outro lado, a grande largura de banda absoluta torna muito mais difícil a construção
de transmissores. Isto porque, estes sistemas normalmente requerem uma temporização
precisa bem como uma elevada taxa de amostragem e consequentemente uma elevada
capacidade computacional de modo a processar todas as amostras.
Os canais que utilizam uma grande largura de banda absoluta possuem as seguintes
características chave [28]:
A análise estatística da amplitude de desvanecimento das caixas de atraso não
recorre necessariamente ao método Rayleigh;
As respostas ao impulso podem tornar-se escassas. Por exemplo, as
componentes multicaminho resolúveis são separadas (no domínio dos atrasos)
por regiões de atraso que não contêm nenhuma contribuição significante de
energia;
As respostas ao impulso apresentam um início suave. Por exemplo, a energia
principal não é recebida (mesmo a média) ao mais pequeno atraso.
Canais com Grande Largura de Banda Relativa:
Os canais de propagação que utilizam uma grande largura de banda relativa também
proporcionam vantagens para os sistemas UWB, nomeadamente apresentam uma
grande robustez dos sinais ao sombreamento. Isto porque, as diferentes componentes de
frequência de um sinal “veem” diferentes condições de propagação no meio. Assim,
existe uma grande probabilidade que pelo menos algumas das componentes consigam
fazer o percurso entre o emissor e o recetor. Por um lado as baixas frequências
conseguem atravessar as paredes e o chão mais facilmente, enquanto as componentes de
altas frequências são refletidas por estes objetos, seguindo em trajetórias de zigzag até
ao recetor.
Por outro lado, construir transmissores UWB com uma grande largura de banda relativa
é particularmente difícil. Torna-se especialmente difícil construir antenas e
26
Tecnologias Sem Fios
Ultra Wideband (UWB)
amplificadores com mais de 10% de largura de banda relativa, quer seja por razões de
ordem prática quer por limitações teóricas.
Os canais que utilizam uma grande largura de banda relativa possuem as seguintes
características chave [28]:
Cada componente multicaminho sofre de distorção, pelo que a resposta ao
impulso não pode ser escrita como o somatório ponderado e os atrasos dos
pulsos delta. Como resultado, deixa de ser válida a suposição de WSSUS (widesense stationary uncorrelated scattering);
O sombreamento e as perdas no percurso tornam-se uma função da frequência
para a qual eles são considerados;
Do mesmo modo, a dispersão angular torna-se dependente da frequência.
O problema da conceção de antenas com uma largura de banda superior a 10% está
diretamente relacionado com estas propriedades. Além disso, o formato do padrão das
antenas altera-se com a frequência, que aumenta a potência isotrópica efetiva radiada
(EIRP) e torna os cálculos do ganho da antena para a conceção da formação dos feixes
mais complexo.
Para uma melhor compreensão das diferentes características chave dos dois canais devese consultar [28].
Modelos Padronizados dos Canais:
Para padronização dos sistemas de comunicação UWB foram padronizados dois
modelos de canais. O primeiro modelo foi o IEEE 802.15.3a que foi desenvolvido para
comparar as diferentes propostas de padronização para as redes WPAN com grandes
taxas de transferência de dados. Neste contexto os ambientes considerados foram
escritórios e residências com alcances inferiores a 10 m. Este modelo é baseado numa
série de medições relativamente pequenas e está descrito com detalhe em [36].
Para as comunicações com baixa taxa de transferência de dados, com um elevado
alcance e que são utilizados numa diversidade de ambientes, o modelo do canal é o
IEEE 802.15.4a. Na definição deste modelo foram considerados vários aspetos que
foram ignorados no IEEE 802.15.3a. Uma descrição detalhada do modelo encontra-se
em [37].
27
Tecnologias Sem Fios
Ultra Wideband (UWB)
No entanto, deve-se ressalvar que estes modelos não estão restringidos a taxas de
transferência de dados específicas [23].
3.2.5 Modulação
Para criar sinais com uma grande largura de banda pode-se utilizar uma grande
variedade de métodos. Aquele que se destaca dos demais é o impulso de rádio com
tempo de salto (TH-IR), esta técnica foi criada por Win and Scholtz [24–26]. Através da
utilização de pequenos pulsos tornou possível a criação de transmissores muito simples
e com uma boa eficiência. Outras técnicas que se destacam das demais são: saltos de
frequência, OFDM (orthogonal frequency-division multiplexing), sequência direta
CDMA (code-division multiple access), e outras técnicas que resultam da combinação
destas. Para todos estes métodos de propagação, é necessário assegurar a eficiência do
acesso múltiplo ao meio. Por exemplo, é necessário garantir várias transmissões UWB
(e assegurar a receção destas pelos respetivos recetores) em simultâneo, e com a mesma
banda de frequência [23].
Impulsos de Rádio:
A comunicação através da transmissão de pequenos impulsos tem várias propriedades
atrativas, como é o caso de permitir a construção de transmissores muito simples. No
entanto, o principal problema trata-se de assegurar uma eficiência espectral aceitável.
Numa primeira avaliação, parecia que com o impulso de rádio só um número reduzido
de utilizadores poderia estar a cada instante ativo. Isto considerando o cenário em que
apenas um símbolo é transmitido em cada pulso. Assim, e como os transmissores UWB
são dessincronizados, poderia ocorrer a situação normalmente designada de colisões
catastróficas, onde os pulsos de vários transmissores poderiam atingir o recetor ao
mesmo tempo. Neste caso o rácio sinal-interferência seria muito mau, originando uma
elevada probabilidade de erro na leitura do bit.
Os impulsos de rádio com tempo de salto (TH-IR) evitam as colisões catastróficas
através da representação de cada bit por vários pulsos pequenos. As posições possíveis
dos pulsos dentro de um símbolo seguem determinadas regras. A duração do pulso é
subdividida em frames Nf de igual tamanho e dentro desta o pulso pode ocupar uma
posição praticamente arbitrária, que lhe é determinada pelo código do tempo de salto.
Normalmente uma frame é subdividida em várias partes, e o tamanho de cada parte é
igual à duração do pulso. O código digital dos tempos de salto determina qual das partes
28
Tecnologias Sem Fios
Ultra Wideband (UWB)
possíveis é que o pulso vai ocupar e este código é diferente para todos os utilizadores.
Assim, mesmo que um pulso dentro do símbolo possa colidir com outro de um outro
utilizador, os restantes pulsos da sequência não colidem, deste modo, as colisões
continuam a existir mas os seus efeitos deixam de ser catastróficos.
Com vista a aumentar a robustez do processo, ao utilizar atrasos pseudoaleatórios dos
pulsos também se torna atrativo utilizar polaridades pseudoaleatórias para cada pulso
[38]. Este processo permite evitar as linhas espectrais que normalmente estão contidas
no espectro de um sinal quando todos os pulsos são transmitidos com a mesma
polaridade. Esta suavização espectral é extremamente importante, uma vez que a
maioria das entidades reguladoras das frequências define uma densidade de potência
espectral máxima que tem de ser assegurada. Se as linhas espectrais existirem, a
potência total transmitida tem de diminuir de modo a satisfazer a máscara espectral,
resultando na diminuição do rácio sinal-ruído (SNR).
A modulação desta sequência de pulsos pode ser:
Modulação da posição dos pulsos (PPM), tal como o sugerido em [25]. Esta
modulação utiliza simples detetores, que servem para determinar quando é que
existe mais energia, se no instante t0 ou em t0+δ. Isto permite tanto a utilização
de recetores não coerentes (detetores de energia) como de recetores coerentes.
No caso de se utilizar recetores não coerentes, o valor de δ deve ser maior que o
atraso da propagação do canal;
Modulação da amplitude dos pulsos (PAM), como é o caso dos BPSK (binary
phase-shift keying) [39]. Os BPSK apenas podem ser utilizados em conjugação
com recetores coerentes, contudo, estes proporcionam um melhor desempenho
que a modulação por posição dos pulsos. O sinal transmitido para o BPSK é
descrito pela seguinte equação:
( )
∑
[
(
]
)
2
∑
onde
(
)
(t) é a unidade de energia transmitida pelo pulso,
repetição do pulso,
é o tempo médio de
é o número de frames (e por consequência o número de pulsos)
29
Tecnologias Sem Fios
Ultra Wideband (UWB)
que representam a informação de um símbolo de tamanho
símbolo transmitido, ±1 por exemplo.
,e
é a informação do
( ) é a sequência de pulsos transmitidos que
representa um símbolo. A sequência de saltos no tempo fornece um deslocamento
adicional no tempo de
as partes e
segundos para o pulso do sinal , onde
é o intervalo entre
são os elementos da sequência pseudoaleatória, que recebe valores inteiros
no intervalo de 0 a
- 1. Para prevenir que os pulsos se sobreponham, o intervalo entre
as partes é selecionado de modo a satisfazer a condição
. A polaridade
aleatória é obtida através da multiplicação de cada pulso por uma variável
pseudoaleatória,
, que pode assumir valores de +1 ou -1 com igual probabilidade. As
sequências dos valores
e
são conhecidas pelo transmissor e pelo recetor.
DS-CDMA:
Desde cedo que a tecnologia UWB tem sido associada aos impulsos de rádio, no
entanto, outros métodos de propagação como a sequência direta CDMA, são uma boa
alternativa para gerar os sinais UWB. A modulação DS-CDMA propaga o sinal através
da multiplicação do sinal a ser transmitido com um segundo sinal que possuí uma
largura de banda muito grande. A largura de banda do sinal total é aproximadamente
igual à largura de banda do sinal de propagação de banda larga. As sequências de
propagação mais populares são as sequências m binárias (sequências de máximo
tamanho), geradas por registos de deslocamento com feedback. O sinal transmitido
recorrendo à modulação DS-CDMA pode ser expresso pela seguinte equação:
( )
∑
[
]
(
)
3
∑
(
)
onde os símbolos têm o mesmo significado que os da equação 2.
A diferença entre um sistema DS-CDMA convencional (o utilizado nos telemóveis, por
exemplo) e os sinais UWB é a velocidade do chip (
). Assim, tanto os aspetos
fundamentais teóricos como os de implementação do DS-CDMA estão bem
compreendidos e testados. O que facilita a sua integração nos sistemas UWB.
30
Tecnologias Sem Fios
Ultra Wideband (UWB)
Quando se compara as equações 2 e 3, é possível encontrar algumas semelhanças. Tanto
a modulação TH-IR como a DS-CDMA transmitem um bit através da multiplicação
deste com a sequência de propagação
( ), e a largura de banda é essencialmente
determinada pela duração e forma do pulso básico,
( ). A grande diferença entre as
duas técnicas reside na natureza da sequência de propagação. No caso de DS-CDMA
consiste apenas nos valores ±1, por outro lado, no caso da modulação IR consiste em
vários zeros com vários ±1 alocados em posições pseudoaleatórias. Como consequência,
os sinais DS-CDMA podem ser mais difíceis de gerar, pois não se trata apenas de gerar
pequenos pulsos entre longos intervalos de tempo, mas requer que estes sejam gerados
continuamente. Além disso, a modulação DS-CDMA anteriormente descrita não
permite a receção não coerente.
OFDM (Orthogonal Frequency-Division Multiplexing):
A modulação OFDM transmite a informação em paralelo através de um elevado número
de subportadoras, sendo que cada subportadora requer apenas uma largura de banda
relativamente pequena. Esta abordagem é bastante utilizada nos sistemas Wi-Fi e
WiMax, por isso a teoria e a implementação desta modulação são bem conhecidos. Na
Figura 6 encontra-se o diagrama de blocos da implementação analógica (a) e digital (b)
da modulação OFDM, numa primeira etapa o fluxo de dados é convertido de série para
paralelo. São então modelados para subportadoras e separados por espaçamentos de
frequência
, onde
é a largura de banda total da transmissão e
é o número de
subportadoras. Se nas implementações analógicas dos modeladores/desmoduladores é
possível a sua implementação (Figura 6 - a), os sistemas atuais utilizam a transformada
inversa rápida de Fourier (IFFT) para obter os mesmos resultados (Figura 6 - b). A
última abordagem referida não necessita de utilizar múltiplos osciladores locais, e por
isso é a que se encontra em uso atualmente. No entanto, necessita que o IFFT e o
conversor analógico/digital operem com elevadas velocidades (a velocidade de relógio
deve ser aproximadamente igual a
).
31
Tecnologias Sem Fios
Ultra Wideband (UWB)
Figura 6 - O princípio da modulação OFDM: (a) implementação analógica e (b) implementação digital [28].
O método de modulação espetral OFDM é altamente eficiente, contudo, não efetua a
propagação do sinal no meio. Por isso, deve ser utilizado em paralelo com outros
métodos de propagação do sinal, como por exemplo: o método de repetição da
codificação, saltos de frequência ou baixa taxa de codificação por convolução. Para
além disso, a modulação OFDM na sua forma original transmite cada símbolo de
informação num único portador, o que implica que este método não explore a
diversidade de frequências inerentes aos sistemas UWB. Para contornar este problema é
necessário utilizar codificação apropriada e/ou múltiplas portadoras CDMA [40].
O impacto gerado pelos canais e antenas dos sistemas UWB-OFDM é semelhante ao
causado nos sistemas OFDM convencionais. Em ambos os casos, o recetor determina a
distorção (atenuação e deslocamento de fase) de cada subportadora e compensa-os por
isso. A escolha do espaçamento entre as subportadoras depende maioritariamente das
características dos canais, especialmente o excesso de atraso máximo, e não da largura
de banda do sistema global.
Saltos de Frequência:
O método de modulação por saltos de frequência (FH) utiliza diferentes portadoras de
frequência em diferentes momentos. Em saltos de baixa frequência, um ou mais
símbolos são transmitidos numa determinada frequência. Em saltos de alta frequência, a
frequência de transmissão altera-se diversas vezes em cada símbolo a ser transmitido.
Neste caso a largura de banda do sinal resultante é determinada pela gama do oscilador
32
Tecnologias Sem Fios
Ultra Wideband (UWB)
e não pela largura de banda do sinal original que se pretende transmitir. Se diferentes
utilizadores utilizarem diferentes códigos de salto (que definem a sequência de
frequências que as portadoras utilizam), a interferências devida aos multiutilizadores
pode ser drasticamente reduzida. Isto porque, a interferência ocorre quando dois
dispositivos usam a mesma portadora de frequência a transmitir dados ao mesmo tempo.
Para detalhar melhor a modulação por saltos de frequência é necessário distinguir os
utilizadores entre síncronos e assíncronos. No caso dos utilizadores síncronos, todos
podem possuir o mesmo padrão de saltos, contudo estes devem ter diferentes offsets
(Figura 7 - a). No caso dos utilizadores assíncronos, não se tem o controlo dos tempos
relativos entre os diferentes utilizadores. Neste caso, as sequências de salto devem
assegurar que exista pouca interferência no acesso múltiplo ao meio para todas as
possibilidades de deslocamento temporal entre os diferentes utilizadores, caso contrário,
podem ocorrer colisões catastróficas entre as transmissões dos utilizadores (Figura 7 b). Este processo é análogo ao existente na modulação TH-IR, é que é necessário
assegurar sequências de tempo de salto únicas de modo a evitar colisões catastróficas.
Figura 7 - Acesso múltiplo ao meio com utilizadores síncronos e assíncronos, utilizando modulação por saltos de
frequência [28].
Um transmissor que utiliza a modulação por saltos de frequência para a tecnologia
UWB pode ser implementado do mesmo modo que um modelador de banda estreita
convencional, cuja saída é misturada com a saída de um oscilador de frequência
variável. Os recetores podem ser construídos recorrendo ao mesmo princípio. Estes
recetores podem ser utilizados desde que o atraso de propagação do canal seja muito
mais pequeno que o intervalo de salto, caso contrário, a energia dos multicaminhos irá
continuar a chegar a uma subportadora, mesmo que o recetor já tenha “saltado” para
uma frequência diferente.
33
Tecnologias Sem Fios
Ultra Wideband (UWB)
Os saltos de frequência podem ser utilizados quer como um regime de acesso múltiplo
próprio, ou pode ser combinado com outros sistemas, como é o caso do OFDM. Esta
última abordagem simplifica a implementação, uma vez que a amostragem e a
conversão analógico/digital só precisam de ser feitas com a taxa correspondente à
largura da largura de banda usada naquele instante pela técnica de modulação OFDM,
ao invés de toda a largura de banda do sistema UWB.
3.2.6 Vantagens e Desvantagens da Tecnologia UWB
Como foi sendo referido durante a descrição da tecnologia UWB, esta apresenta
enumeras vantagens em relação às demais tecnologias, nomeadamente as tecnologias de
banda estreita. Assim, é possível realçar as seguintes vantagens [18–20], [22], [23],
[28], [41]:
Fim da limitação da utilização do espectro. Atualmente o espetro disponível para
transmissões de dados é escasso. Com o desenvolvimento de novos produtos
torna-se necessário mais espetro para corresponder às necessidades que estes
dispositivos possuem, contudo, neste sector existe muita concorrência para o
espetro disponível e o custo de licenciamento é extremamente elevado. Com a
utilização do UWB é possível que todos esses dispositivos operem num só canal
sem ter de licenciar uma parte do espetro.
Aumento da capacidade do canal. Um canal é o meio RF através do qual a
informação é transferida. Pela equação de Shannon que calcula o limite de
capacidade do canal, é possível observar que a capacidade aumenta mais em
função da largura de banda (BW) do que da relação sinal-ruído (SNR), como se
pode observar na seguinte equação [20]:
(
onde
Hz e
)
é a capacidade do canal em bits/s, BW é a largura de banda do canal em
é a relação sinal-ruído, que é determinado pela seguinte equação:
,
onde
4
é a potência do sinal recebido e
5
é a densidade da potência espectral
do ruído. Assim, pela análise das equações é possível observar que para
aumentar a capacidade do canal é necessário um aumento linear da largura de
banda ou um aumento exponencial da potência de transmissão do sinal. Esta é a
34
Tecnologias Sem Fios
Ultra Wideband (UWB)
razão pela qual a tecnologia UWB tem um baixo consumo de energia, uma vez
que tem uma largura de banda muito grande.
Ao contrário das tecnologias sem fios tradicionais, que utilizam um mecanismo
de acesso ao meio cuja taxa de transferência de dados varia conforme a
ocupação do canal, o que pode levar a uma redução temporária da largura de
banda disponível. A tecnologia UWB permite que vários dispositivos estejam a
aceder ao meio sem que isso implique uma redução da largura de banda.
O tempo de latência nas comunicações UWB também é baixo, uma vez que esta
tecnologia possui uma baixa sobrecarga de protocolos.
Permite transmissões seguras, uma vez que os dispositivos UWB transmitem
milhões de pulsos codificados por segundo com emissões de baixa energia ao
longo de toda a largura de banda, e utilizando códigos de tempos de transmissão
únicos para cada par transmissor/recetor. Como estas transmissões possuem uma
assinatura de baixa frequência de rádio, proporciona transmissões seguras e
baixa probabilidade de serem detetadas/intersetadas.
Proporciona uma grande resolução para o cálculo da distância, que tem
particular interesse para aplicações de radar e georreferenciação.
Grande capacidade de transmissão de dados (superior a 400 Mbps) para
dispositivos que operem num raio inferior a 10 m.
Elevada robustez à interferência e ao desvanecimento do sinal. O
desvanecimento ocorre quando as reflexões aleatórias dos multicaminhos são
recebidas desfasadas em relação ao sinal original, originado uma redução da
amplitude deste mesmo sinal. Assim, devido às características do próprio sinal
UWB, estas flutuações aleatórias da amplitude do sinal são reduzidas e como os
pulsos são de curta duração previne a interferência destrutiva causada pelos
multicaminho. Outra característica muito importante na tecnologia UWB é que
para além de esta ser capaz de resolver os problemas causados pelos
multicaminhos estes ainda podem ser utilizados para melhorar a receção do
próprio sinal.
Contudo, esta tecnologia apresenta algumas desvantagens que têm impedido a sua
utilização generalizada nos dispositivos, entre elas temos:
35
Tecnologias Sem Fios
Wi-Fi (Wireless Fidelity)
Devido às restrições na potência do sinal impostas pelas diversas agências de
regulação das comunicações, só é possível obter elevadas taxas de transferência
de dados para aplicações de curto alcance (cerca de 10 metros). Contudo,
existem dispositivos, como o PulsON 400 RCM da Time Domain [32], que caso
a aplicação não necessite de elevadas taxas de transferência estes conseguem
distâncias de transmissão superiores a 350 metros.
Elevado custo das placas de desenvolvimento. A placa de desenvolvimento da
Time Domain utiliza uma técnica inovadora para garantir comunicações de
longo alcance e melhor desempenho, esta técnica baseia-se no processamento
coerente do sinal. Contudo, o preço de um Kit de desenvolvimento é bastante
caro, ficando por volta de 99905 USD mais portes de envio.
Necessidade de grande capacidade computacional para o tratamento dos dados.
Estes sistemas requerem uma temporização precisa, bem como uma elevada taxa
de amostragem, que implica uma capacidade computacional acrescida de modo
a processar todas as amostras.
Os sistemas com grandes larguras de banda tornam particularmente difícil a
conceção de transmissores eficientes bem como a construção de amplificadores
e antenas.
3.3 Wi-Fi (Wireless Fidelity)
O termo Wi-Fi (abreviatura de Wireless Fidelity) corresponde ao nome da certificação
dada pelo grupo Wi-Fi Alliance, este grupo é responsável por assegurar a
compatibilidade dos dispositivos de hardware com o padrão para as redes WLAN
802.11. Inicialmente o termo Wi-Fi só era utilizado nos produtos do subgrupo de
trabalho 802.11b, contudo, a Wi-Fi Alliance generalizou a utilização da marca
registrada Wi-Fi para todos os produtos das redes WLAN que operem sob os diferentes
subgrupos de trabalho do padrão 802.11. Assim, sempre que se utilize o termo Wi-Fi
está-se a referir a um dos subgrupos de trabalho do padrão 802.11.
Habitualmente, quando os utilizadores empregam o termo Wi-Fi é para se referir há
possibilidade de aceder à internet sem ter de utilizar fios. Contudo, nos dias de hoje esta
definição não é verdadeira, pois a tecnologia Wi-Fi permite fazer muitas mais coisas,
como por exemplo descarregar músicas para o MP3, enviar ficheiros para a impressora,
transferir fotografias/filmes do computador para a televisão, entre outras aplicações.
36
Tecnologias Sem Fios
Wi-Fi (Wireless Fidelity)
3.3.1 História
Tradicionalmente as tecnologias para as trocas de informação eram compostas por
ligações em redes de cobre ou de fibra ótica. Contudo, estas redes são extremamente
caras, muito complexas de construir e existem locais/ocasiões em que é praticamente
impossível a criação de redes cabladas (situações de guerra, por exemplo). Aliado a
estes fatores, o desenvolvimento dos computadores e dos dispositivos portáteis
(telemóveis, PDA, por exemplo) exigia mobilidade, algo que as redes cabladas eram
incapazes de fornecer. Por outro lado, os consumidores queriam garantias que os
produtos fossem capazes de comunicar entre si, mesmo sendo de fabricantes diferentes.
Assim, para assegurar a compatibilidade entre os diferentes produtos, o comité do IEEE,
já antes responsável pela padronização das redes LAN como a 802.3 Ethernet, foi
designado para criar um padrão para regular as comunicações sem fios. Em meados dos
anos 90 deu-se início ao processo de padronização das comunicações sem fios. Nessa
época o protocolo cablado LAN mais utilizado era a Ethernet, por isso o referido comité
decidiu que o padrão para as comunicações sem fios 802.11 que acima da camada data
link deveria ser compatível com a Ethernet. Este padrão descreve as características de
uma rede WLAN, que é em tudo idêntica à rede LAN tirando as camadas inferiores do
modelo OSI (Figura 8), nomeadamente a camada física e a data link.
Figura 8- Modelo OSI [42].
Em 1997 surge o primeiro padrão das comunicações sem fios, o IEEE 802.11 com uma
taxa de transferência de dados de 1 Mbps. Contudo, só em 1999 com o lançamento do
padrão do subgrupo de trabalho 802.11b é a que se começou a generalizar o uso das
WLAN. Em grande parte devido ao grupo Wi-Fi Alliance, formalmente designada de
WECA (Wireless Ethernet Compatibility Alliance), visto que este grupo é responsável
37
Tecnologias Sem Fios
Wi-Fi (Wireless Fidelity)
por assegurar a compatibilidade e correspondente certificação do hardware dos
diferentes dispositivos que utilizam o padrão 802.11. Assim, a Wi-Fi Alliance criou o
conceito Wi-Fi (Wireless Fidelity), que deriva do termo Hi-Fi (High Fidelity), para
garantir que um determinado produto está certificado. Normalmente, o nome Wi-Fi é
confundido com o próprio padrão 802.11, isto está diretamente relacionado com
questões de marketing. Os dispositivos certificados pela Wi-Fi Alliance possuem o
logotipo da marca, deste modo, é garantido aos utilizadores que os dispositivos que
possuem este símbolo podem comunicar entre si [44], [45].
Com os dispositivos Wi-Fi é possível criar redes WLAN de alta velocidade, permitindo
que os dispositivos móveis possam trocar dados entre si (redes ad hoc) ou com o ponto
de acesso para uma ligação à rede. Atualmente esta tecnologia tem uma vasta gama de
aplicações, podendo ser utilizada em casas, restaurantes, universidades, aeroportos,
estações de comboios, parques públicos, entre muitas outras aplicações [44].
3.3.2 Diferentes Padrões do Grupo de Trabalho 802.11 (ou Wi-Fi)
Na realidade o padrão 802.11 do IEEE foi apenas o primeiro padrão das comunicações
sem fios, este padrão permitia velocidades de transferência de dados na ordem dos 1-2
Mbps na banda de frequência de 2.4 GHz. Com o desenvolvimento das tecnologias de
informação, principalmente os computadores, estas taxas de transferência de dados eram
insuficientes para satisfazer as necessidades dos utilizadores. Tendo em consideração
estas exigências foram desenvolvidos novos subgrupos de trabalho dentro do padrão
802.11. Assim, cada um destes novos subgrupos de trabalho empregaram diferentes
técnicas, diferentes frequências e/ou modulações, com vista a satisfazer as necessidades
dos utilizadores. Na Tabela 1, baseada em [43], encontra-se uma comparação entre os
principais subgrupos de trabalho do padrão 802.11.
38
Tecnologias Sem Fios
Wi-Fi (Wireless Fidelity)
Tabela 1 - Comparação dos diferentes padrões 802.11.
Nome do
Padrão
Frequência de
Operação
Taxa de
Transferência
Máxima
Alcance
(Ambientes
Indoor)
Técnica de
Modulação
Utilizada
802.11a
5 GHz
54 Mbps
10m
OFDM
802.11b
2.4 GHz
11 Mbps
50m
DSSS
802.11g
2.4 GHz
54 Mbps
27m
OFDM
≈60m
BPSK, QPSK,
16-QAM ou 32QAM
802.11n
2.4/5 GHz
248 Mbps
Os valores da taxa de transferência e do alcance podem variar, dependendo das
condições do local em questão. Também é possível manipular a taxa de transferência de
modo a ser possível transmitir para distâncias superiores às apresentadas na Tabela 1,
como se pode observar em [45]. As técnicas de modulação serão explicadas na secção
3.3.4.
3.3.3 Características e Arquitetura da Rede Wi-Fi
Como já foi referido, o padrão 802.11 reserva os níveis inferiores do modelo OSI para
as comunicações sem fios que utilizam ondas eletromagnéticas, nomeadamente a
camada física também conhecida como PHY e a camada data link, esta última contem
duas subcamadas: a Logical Link Control (LLC) e a Media Access Control (MAC).
Na camada física é definida a modulação da onda de rádio e as características do sinal
para a transmissão de dados, por outro lado, na camada data link é definido o interface
entre o barramento da máquina e a camada física, em particular o método de acesso
próximo daquele que é utilizado no padrão Ethernet e as regras para a comunicação
entre as estações da rede. Na Figura 9 estão representadas as camadas acima referidas,
em que se pode verificar os diferentes tipos de modulações disponíveis na camada física
e a divisão da camada data link [45].
39
Tecnologias Sem Fios
Wi-Fi (Wireless Fidelity)
Figura 9 – Camadas do modelo OSI que diferencia as comunicações sem fios da Ethernet, exemplo para o padrão
802.11 [45].
Ligação entre um AP e um Cliente
Normalmente, uma rede Wi-Fi contém um ou mais pontos de acesso (AP) e um ou mais
cliente. Um AP difunde o seu SSID (identificador do serviço ou nome da rede) através
de pacotes que se designam por beacons, que por norma são difundidos a cada 100ms.
Estes beacons são transmitidos a 1 Mbps e têm uma duração relativamente curta, por
isso não afeta significativamente o desempenho do sistema. Por outro lado, como 1
Mbps é a taxa de transferência de dados mais baixa que uma rede Wi-Fi pode operar,
isso garante que quem recebe esse pacote pode comunicar pelo menos a 1 Mbps. O
cliente tem a liberdade de escolher o AP ao qual pretende estabelecer uma ligação, essa
escolha pode ser efetuada baseando-se nos parâmetros da rede, como por exemplo o
SSID. Caso dois APs possuam o mesmo identificador de rede (SSID) e estejam ao
alcance do utilizador, o firmware do cliente deve escolher a qual AP se vai ligar com
base no parâmetro da força do sinal que recebe. A região coberta por um ou mais APs é
designada de hotspot. O alcance do hotspot pode variar de uma sala até vários
quilómetros quadros, através da sobreposição de hotspots [43].
Modos de Operação da Rede Wi-Fi
O padrão 802.11 define dois modos de operação para as redes sem fios [45], [46]:
Modos de infraestrutura, neste modo os clientes que acedem às redes sem fios
ligam-se ao ponto de acesso (AP). Este é o modo por defeito estabelecido para
os clientes que operam no padrão 802.11b;
Modo ad hoc, neste modo os clientes estabelecem ligações uns com os outros,
sem recorrer a nenhum AP.
a) Modo de Infraestrutura:
No modo de infraestrutura (Figura 10), cada cliente conecta-se ao ponto de acesso
através de uma ligação sem fios. A ligação estabelecida entre o AP e a estação
40
Tecnologias Sem Fios
Wi-Fi (Wireless Fidelity)
localizada dentro hotspot é designado de conjunto de serviços básicos (BSS). Cada BSS
é identificado por um BSSID, um identificador de 6 bytes, que no caso do modo de
infraestrutura corresponde ao endereço MAC do AP. Por outro lado o AP também
desempenha a função de conector entre a rede cablada e a rede sem fios. Os APs fazem
parte integral da infraestrutura da rede cablada e tal como esta não são unidades móveis.
Figura 10 - Representação de uma rede Wi-Fi de infraestrutura [45].
É possível ligar vários APs entre si, basta utilizar uma ligação designada de sistema
distribuído, de modo, a formar um conjunto de serviços estendidos (ESS). Este sistema
distribuído tanto pode ser recorrendo a uma rede cablada (um cabo liga dois APs entre
si) ou por uma rede sem fios (Figura 11).
Figura 11 - Representação de um sistema Wi-Fi distribuído [47].
Um ESS é identificado por um ESSID (identificador dos conjunto de serviços
estendido), um identificador de 32 caracteres no formato ASCII que desempenha o
papel de identificador da rede. De certo modo, este ESSID desempenha uma medida de
segurança básica, uma vez que uma estação/cliente necessita de conhecer o ESSID para
estabelecer a ligação.
41
Tecnologias Sem Fios
Wi-Fi (Wireless Fidelity)
Quando um utilizador desloca num hotspot ESS, o seu dispositivo tem a capacidade de
trocar de AP mediante a qualidade do sinal que recebe dos vários APs. Por sua vez, os
APs comunicam uns com os outros no sentido de trocar informações sobre as
estações/clientes, e caso seja necessário, enviar informações das estações móveis. Esta
característica é designada de roaming [45], [47].
b) Modo ad hoc:
No modo ad hoc (Figura 12), os dispositivos que suportam ligações sem fios podem
ligar-se entre si e formar uma rede ponto a ponto, em que cada dispositivo atua tanto
como cliente e como AP. Neste caso quando um destes dispositivos transmite uma
trama de dados, todos os dispositivos vão receber essa mesma trama. Neste caso não
existe distinção do destinatário.
Figura 12 - Representação de uma rede Wi-Fi ad hoc [45].
O conjunto formado por estes dispositivos é chamado de conjunto de serviços básicos
independente (IBSS). Um IBSS é uma rede sem fios composta por pelo menos dois
dispositivos que não utilizam um AP para comunicar entre si. Esta tem como objetivo
permitir a criação de uma rede temporária para trocas de informação, e possui um
identificador da rede tal como no caso do modo de infraestrutura ESS.
Nestas redes o alcance IBSS é determinado pelo alcance de cada estação, o que implica
que dois dispositivos vão ser incapazes de se comunicar se estiverem fora do alcance
um do outro, mesmo que entre eles exista um outro dispositivo ligado há mesma rede
[45], [47].
42
Tecnologias Sem Fios
Wi-Fi (Wireless Fidelity)
3.3.4 Modulação
Como já foi referido anteriormente, é na camada física do modelo OSI que os diversos
métodos de modulação são especificados/implementados. As principais técnicas de
modulação utilizadas nas comunicações Wi-Fi são: infravermelhos; FHSS (saltos de
frequência); DSSS (dispersão do espetro por sequência direta); e OFDM (orthogonal
frequency division multiplexing). O princípio de funcionamento destas técnicas é em
tudo idêntico às referidas na secção 3.2.5, exceto a técnica que recorre a infravermelhos,
uma vez que esta não é utilizada na tecnologia UWB.
Apesar da técnica de modulação por infravermelhos ser algo rudimentar e em desuso,
esta foi a primeira técnica de modulação utilizada no padrão 802.11. Esta técnica tem
bastantes limitações, quer ao nível da taxa de transmissão de dados (apenas permitia 1
ou 2 Mbps), quer pelas limitações em propagar o sinal (este não atravessa paredes, e é
afetado pelos raios solares). Nesta técnica os bits são codificados em grupos de 2 ou 4
bits como um código grey de 16 bits [48].
3.3.5 Vantagens e Desvantagens da Tecnologia Wi-Fi
Como foi sendo referido, a tecnologia Wi-Fi é amplamente utilizada nas mais diversas
aplicações comerciais, isto deve-se ao facto desta tecnologia possuir enumeras
vantagens, entre as mais relevantes temos [43], [49]:
Boa taxa de transferência de dados. Os dispositivos que suportam a rede 802.11g
suportam velocidade de transferência de dados até 54 Mbps, o que satisfaz a
necessidade de grande parte das aplicações;
Baixo preço. Devido à grande variedade de fabricantes destes aparelhos, o preço
está constantemente a diminuir;
Garantia de compatibilidade com outros produtos de fabricantes diferentes. Os
produtos que possuem o logotipo da Wi-Fi Alliance estão certificados por esta e
por isso garantem 100% de compatibilidade com os restantes aparelhos;
Facilidade de instalação. Para instalar uma rede Wi-Fi não é necessário
instaladores profissionais e não é necessário fazer furos ou rasgos para passar
cabos;
Boa cobertura de rede. As ondas de rádio têm a característica de se propagar em
todas as direções, o que proporciona uma grande área de cobertura.
43
Tecnologias Sem Fios
ZigBee
Contudo, esta tecnologia também apresenta algumas limitações, entre as mais relevantes
temos [44], [45], [49]:
Segurança. Como as ondas de rádio se dispersão em todas direções, por vezes
torna-se complicado limitar o espaço da rede que se pretende criar, aliada a esta
característica alguns dos APs não vêm encriptados, o que proporciona uma
oportunidade para que intrusos possam aceder a informações sobre os dados que
se estão a partilhar e aceder à internet, por exemplo. Atualmente o melhor
método de proteger a rede é utilizar a encriptação de redes sem fios WPA2
(proteção do acesso Wi-Fi);
Interferência com outros dispositivos. Como estes dispositivos operam numa
frequência do espetro livre (2.4 ou 5 GHz) partilham esse mesmo espetro com
muitas outras aplicações, como é o caso dos telemóveis, dispositivos Bluetooth,
monitores de bebés, entre muitos outros. Se estes dispositivos estiverem a operar
próximos dos dispositivos Wi-Fi vai ocorrer uma forte interferência originando
uma quebra no desempenho dos dispositivos;
Dificuldade em detetar colisões. Ao contrário da rede cablada Ethernet, as redes
Wi-Fi não são capazes de detetar colisões no meio, por isso utilizam trocas de
pacotes (RTS/CTS) para tentar evitar os problemas das colisões nos canais. O
que afeta a velocidade de transferência de dados;
Consumo de energia. Esta tecnologia tem um consumo de energia elevado, o
que para as aplicações embebidas (como recorrem a baterias para o seu
funcionamento) torna-se inviável pois a carga da bateria é consumida muito
rapidamente.
3.4 ZigBee
A tecnologia ZigBee foi desenvolvida com os prossupostos de ser uma tecnologia sem
fios de baixo custo, baixo consumo e de comunicações nos dois sentidos. A sua
especificação foi desenvolvida sob o grupo de trabalho IEEE 802.15.4 que tem como
objetivo desenvolver padrões para WPAN.
44
Tecnologias Sem Fios
ZigBee
3.4.1 História
Com o rápido desenvolvimento dos dispositivos portáteis, foi necessário criar uma
alternativa às redes sem fios tradicionais pois estas não são apropriadas para aplicações
embebidas, pois estas requerem um baixo consumo.
A tecnologia ZigBee é relativamente recente, teve a sua primeira versão apresentada ao
público em meados de 2005. Com o objetivo de criar um modelo padrão para as
comunicações no âmbito dos sensores e dispositivos de controlo, a ZigBee Alliance
agregou-se com várias empresas por todo mundo para criar o padrão de comunicações
ZigBee, e este por sua vez opera sob as normas do grupo de trabalho do IEEE 802.15.4.
Atualmente esta tecnologia é aceite a nível global e está presente nas mais diversas
aplicações.
3.4.2 Características e Arquitetura das Redes ZigBee
A tecnologia ZigBee opera em três bandas do espetro que são isentas de licenciamento.
Grande parte dos dispositivos desenvolvidos opera na banda dos 2.4GHz, contudo, estes
também podem operar na banda 868 MHz e 915 MHz para a Europa e Estados Unidos
da América, respetivamente. O principal motivo por a maior parte dos dispositivos
operarem na banda dos 2.4GHz prende-se com o facto de nesta banda ser possível
atingir taxas de transmissão na ordem dos 250 Kbps e existirem 16 canais disponíveis.
Por sua vez caso opere na banda dos 868 MHz, só tem um canal disponível e uma taxa
de transferência de dados de 20 Kbps, ou no caso dos 915 MHz, uma taxa de
transferência de 40 Kbps e 10 canais disponíveis.
Arquitetura da Pilha
Tal como na tecnologia Wi-Fi, a tecnologia ZigBee também se baseia no modelo OSI.
Contudo, na pilha ZigBee algumas das camadas não estão definidas, uma vez que não
são necessárias para atingir as funcionalidades desejadas, por outro lado, a não inclusão
destas proporciona um melhor desempenho do sistema. Na Figura 13 está representada
detalhadamente a arquitetura protocolar ZigBee.
45
Tecnologias Sem Fios
ZigBee
Figura 13 - Arquitetura da pilha protocolar ZigBee [50].
Na camada física (PHY) e na camada de acesso ao meio (MAC) são especificados os
requisitos do grupo de trabalho 802.15.4. Por seu lado, na camada de rede (NWK) e na
camada da aplicação é especificado o protocolo ZigBee [50].
Topologias da Rede
A camada de rede da pilha protocolar ZigBee suporta as topologias em estrela, árvore e
malha. Na topologia em estrela, a rede é controlada por um único dispositivo chamado
de coordenador. O coordenador fica responsável por iniciar e manter os dispositivos na
rede. Os restantes dispositivos, designados de end device, comunicam diretamente com
o coordenador. No caso das topologias em árvore e em malha, o coordenador continua a
ser o responsável por iniciar a rede e definir alguns parâmetros chave da rede, para
estender o alcance da rede é necessário utilizar routers. No caso da topologia de rede em
árvore, os routers transferem dados e mensagens de controlo utilizando uma estratégia
de roteamento hierárquica. Na topologia de rede em malha as comunicações são
realizadas ponto a ponto, os routers podem comunicar diretamente com o coordenador
[50]. Na Figura 14 estão representadas as diferentes topologias de rede utilizadas nas
comunicações ZigBee.
46
Tecnologias Sem Fios
ZigBee
Figura 14 - Topologias possíveis da rede ZigBee [51].
Modos de Operação da Rede
Existem dois modos de operação: o modo beacon; e o modo non-beacon. No primeiro
modo, os dispositivos coordenador e routers enviam sinalizações periódicas a informar
a sua presença aos dispositivos end device, assim é possível aumentar a autonomia da
bateria dos mesmos. No modo non-beacon os dispositivos estão permanentemente
ligados, o que implica um consumo muito maior de energia que pode originar a
necessidade de uma fonte de alimentação.
3.4.3 Vantagens e Desvantagens da Tecnologia ZigBee
Entre as principais vantagens da tecnologia ZigBee temos:
Baixo consumo energético. Quando comparado com as restantes tecnologias a
tecnologia ZigBee apresenta um consumo energético muito inferior;
Baixo custo. A pilha protocolar implementada é bastante simplificada, o que
leva a uma grande redução no tamanho do código, conduzindo a interfaces de
baixo custo;
Possibilidade de formar uma rede com um grande número de dispositivos. Com
um único coordenador é possível ligar 65535 dispositivos;
Baixa latência. Os dispositivos requerem um tempo de ligação à rede inferior às
restantes tecnologias e a passagem do modo standby para ativo também é
menor;
Elevada fiabilidade e elevada segurança.
47
Tecnologias Sem Fios
Comparação das Tecnologias Sem Fios
Contudo, a tecnologia ZigBee também apresenta algumas desvantagens que limitam a
sua utilização, entre elas:
Baixa taxa de transferência de dados;
Baixo alcance de transmissão. É possível obter grandes distâncias de
comunicação mas tem de se recorrer a outros dispositivos intercalados;
Comunicações sujeitas à interferência causada por outros dispositivos que
operam na mesma banda de frequência.
3.5 Comparação das Tecnologias Sem Fios
Após uma análise das potenciais tecnologias a utilizar no desenvolvimento da aplicação,
trona-se necessário uma análise dos vários parâmetros relevantes à aplicação: taxa de
transferência de dados; alcance da transmissão; precisão na localização; consumo de
energia; desempenho com multicaminhos; interferência com outros sistemas;
complexidade e custo. Análise que se encontra na Tabela 2.
48
Tecnologias Sem Fios
Comparação das Tecnologias Sem Fios
Tabela 2 - Comparação das diferentes tecnologias sem fios, adaptado de [22].
Taxa de
Transferência de
Dados
ZigBee
Wi-Fi
UWB
Baixa (250 kbps
máximo)
Alta (54 Mbps no
caso da 802.11g+)
Variável (Pode
atingir 500 Mbps
para distâncias
pequenas)
Alcance da
Transmissão
Baixo (< 30 m)
Elevado (> 100 m)
Baixo (< 10 m)
para altas taxas de
transferência de
dados, caso
contrário pode
chegar aos 300 m
Precisão na
Localização
Baixo (poucos
metros)
Baixo (poucos
metros)
Elevado (< 50 cm)
Consumo de
Energia
Médio (de 20 mW)
Elevado (de 500
mW a 1 W)
Baixo (0.05 mW)
[52]
Desempenho com
Multicaminhos
Fraco
Fraco
Bom
Interferência com
outros Sistemas
Alta
Alta
Baixo
Complexidade e
Custo
Baixo
Elevado
Elevado
Após a análise da Tabela 2 é possível verificar que a tecnologia mais atrativa para a
aplicação em causa é a UWB, uma vez que as suas características são muito superiores
às restantes tecnologias. Contudo, e como já foi referido, o custo de aquisição de uma
placa de desenvolvimento é extremamente elevado, o que impossibilita a utilização
desta tecnologia no âmbito desta dissertação. Assim sendo, a melhor opção é a
tecnologia ZigBee.
Para o desenvolvimento do sistema proposto, será utilizada a placa de desenvolvimento
AVR Raven da Atmel [53]. Esta placa possui diversas vantagens, entre elas: reduzidas
dimensões; dois modos de alimentação (bateria e alimentação externa); antena e módulo
de comunicação RF integrado na placa; indicador dos parâmetros da comunicação
(RSSI); software dedicado às comunicações ZigBee (BitCloud); sensor de temperatura;
entre outras características relevantes. Uma descrição mais detalhada da placa será
efetuada no capítulo 5.
49
Tecnologias Sem Fios
Comparação das Tecnologias Sem Fios
Contudo, a placa de desenvolvimento AVR Raven não possuí um relógio com precisão
suficiente que permita determinar a localização através da técnica tempo de voo ou
similares. Assim, para o cálculo da posição serão utilizadas as técnicas que têm por base
a força do sinal. No próximo capítulo será efetuado um estudo sobre as técnicas
existentes.
50
4 Modelos para Localização Indoor Baseados na Força do
Sinal
Paralelo ao desenvolvimento dos sistemas de comunicação pessoais, surgiu um interesse
na caracterização da propagação dos sinais de rádio dentro dos edifícios. Os canais de
rádio indoors diferem dos outdoors em dois aspetos: a distância de cobertura é muito
menor; e para uma pequena distância de comunicação existe uma diversidade de
ambientes muito maior. Comparando as distâncias de comunicação dos dois sistemas, a
propagação dentro de edifícios possuí uma maior complexidade em lidar com os
multicaminhos que os sistemas outdoor. Em parte, isto deve-se à natureza das estruturas
utilizadas nos edifícios, do formato das divisórias, e o mais importante os materiais
utilizados [54].
Quando se pretende desenvolver um sistema de localização baseado na força do sinal
existem duas abordagens possíveis:
Utilização de modelos de propagação do sinal. Estes modelos são utilizados para
estimar a atenuação do sinal no meio de propagação, e com base nessa
estimativa utilizar o valor das distâncias calculadas para determinar a posição do
utilizador/objeto.
Técnica fingerprinting. Esta técnica baseia-se na comparação dos valores de
RSSI, recebidos pelos diferentes dispositivos da rede, com os valores
previamente obtidos, cuja posição já é conhecida.
4.1 Fingerprinting
O desenvolvimento da técnica fingerprinting está diretamente relacionado com o
desenvolvimento das redes de comunicações sem fios (IEEE 802.11), esta técnica é
baseada na recolha e armazenamento de características e comportamento do sinal de
rádio num determinado ambiente. Esta técnica possui a grande vantagem de não
necessitar de hardware especializado, pois o seu funcionamento tem por base a recolha
de dados referentes ao indicador da força do sinal (RSSI) de vários pontos de acesso,
colocados em posições previamente estabelecidas. Como o valor do RSSI é inerente a
qualquer dispositivo que comunique sem fios, o sistema de localização pode ser
51
Modelos para Localização Indoor Baseados na Força do Sinal
Fingerprinting
desenvolvido
exclusivamente
em
software,
que
reduz
significativamente
a
complexidade e o custo do sistema.
Normalmente, os sistemas que recorrem à técnica de fingerprinting só utilizam os
valores de RSSI para estimar a posição do utilizador/objeto. Contudo, é complementar
esta técnica com outros métodos de modo a melhorar a precisão do sistema. O
desenvolvimento destes sistemas consiste em duas fases: a fase offline ou fase de
calibração; e a fase online ou fase de operação [55].
4.1.1 Fase de Offline
Durante a fase offline, os dados relativos ao valor RSSI recebido de cada dispositivo,
são recolhidos e armazenados na base de dados, com a devida referência da posição em
que os dados foram recolhidos. Esta recolha de dados é manual e é efetuada no local
onde o sistema deve ser implementado.
Para o processo de calibração é útil criar uma grelha sobreposta à representação gráfica
do local onde se pretende efetuar as medições. Esta grelha permite identificar os locais
onde é necessário efetuar as medições. Para cada local são recolhidas as informações
necessárias e de seguida armazenados na base de dados, esta base de dados também é
conhecida como mapa de fingerprinting (MF). Na Figura 15 está representado um
exemplo de um MF.
52
Modelos para Localização Indoor Baseados na Força do Sinal
Fingerprinting
Figura 15 - Mapa de Fingerprinting [55].
Devido ao desvanecimento e outros fenómenos, o valor RSSI medido por um
dispositivo móvel num determinado lugar está sujeito a variações ao longo do tempo.
Para evitar estas interferências, pode-se armazenar os vários valores de RSSI obtidos
numa determinada posição e calcular a média dos valores obtidos. Na fase online serão
utilizados os valores médios das várias leituras para cada posição (tipicamente <20
leituras) para efeitos de cálculo da posição [55].
4.1.2 Fase Online
Na fase online, são recolhidos os valores de RSSI relativos às comunicações entre os
transmissores e os dispositivos móveis, depois de receber as informações de todos os
dispositivos, o sistema recorre a um complexo algoritmo de posicionamento e ao MP
para estimar a posição do utilizador/objeto. De seguida o sistema reporta a posição
estimada.
Esta técnica tem a grande desvantagem da forte dependência ao local onde o MF foi
efetuado, sendo impossível utilizar estes valores em outros locais. No caso de os
edifícios possuírem grandes dimensões a tarefa de criar o MF pode tornar-se
praticamente impossível. Outra desvantagem desta técnica é o facto de ser muito
53
Modelos para Localização Indoor Baseados na Força do Sinal
Modelos de Propagação Indoor
sensível a alterações no meio, basta colocar uma estante num determinado local para
invalidar os pontos do MF dessa região [55].
4.2 Modelos de Propagação Indoor
Nos dias de hoje, quando se pretende desenvolver um sistema de localização indoor,
dois dos principais requisitos é que este seja preciso e exato. Uma boa alternativa para
cumprir estes requisitos passa pela determinação das características de propagação do
sinal através do meio. Isto porque a construção de mapas de fingerprinting para locais
de grandes dimensões é extremamente cara e morosa, assim, os modelos de propagação
foram desenvolvidos para dar uma alternativa barata e conveniente. Estes modelos
dividem-se em duas grandes classes: modelos estatísticos e modelos específicos do
local.
Por outro lado, a modelização do canal torna-se um requisito para prever as perdas
durante o percurso e para a caracterização da resposta ao impulso do canal de
propagação. As perdas durante o percurso estão diretamente relacionadas com o projeto
dos dispositivos de transmissão, e através destas é possível calcular a potência que se
deve transmitir um sinal de forma a este cobrir uma determinada área. As principais
características de um canal de rádio são: perdas no caminho, desvanecimento, e atraso
na propagação. Esta análise dos modelos de propagação é baseada em [54].
Perdas no Caminho:
A atenuação média que um sinal RF sofre durante o percurso do transmissor até ao
recetor, após ter percorrido um caminho de vários comprimentos de onda, é designada
de perdas no caminho (PL). E é definido por [56]:
(
onde,
e
)
6
são a potência transmitida e recebida, respetivamente. No espaço livre, a
potência que o chega ao recetor (cuja distância à antena transmissora é representada por
d) é determinada pela equação de Friis em espaço livre:
(
onde,
e
)
(
)
são o ganho da antena transmissora e recetora, respetivamente.
7
é o fator
de perda do sistema, este não está relacionado com a propagação do sinal.
54
é o
Modelos para Localização Indoor Baseados na Força do Sinal
Modelos de Propagação Indoor
comprimento de onda em metros. E como se pode observar na equação 7 o valor de
não pode ser 0. Por isso, muitos modelos de propagação utilizam uma notação para
distâncias pequenas (
), conhecido por ponto de referência da potência recebida.
Normalmente a distância escolhida é 1 m. Como é natural, para os canais de rádio
realistas, a definição do meio como espaço livre não é apropriada. Neste sentido, um
modelo PL genérico utiliza o parâmetro
para indicar a relação entre distância e a
potência recebida. Assim, as percas do caminho (em decibéis) podem ser expressas
como [57]:
( )
onde
(
)
( )
,
8
corresponde ao espaço livre. Contudo, para os cenários de aplicação dos
canais de redes sem fios o valor de
é sempre superior.
indica a média zero da
variável aleatória gaussiana do desvio padrão σ, que reflete a variação média da
potência recebida, que normalmente acontece neste tipo de modelos baseados em PL.
As perdas no caminho são a principal componente dos modelos de propagação. Está
também relacionado com a área de cobertura da rede.
Atrasos na Propagação:
Nos canais de rádio móveis existe uma grande variação nos tempos de dispersão, isto
deve-se ao facto de as reflexões e dispersões ocorrerem em locais aparentemente
aleatórios, o que implica uma resposta do canal aos multicaminhos aparentemente
aleatória. Como o tempo de dispersão é dependente da relação da posição geométrica
entre o transmissor, o recetor e o ambiente físico circundante, alguns parâmetros desta
componente podem ser utilizados para quantificar os multicaminhos do canal. Estes
parâmetros representados na Figura 16 são: atraso da primeira chegada ( ); excesso de
atraso médio ( ); atraso RMS (
); e excesso de atraso máximo. Estes parâmetros
podem ser analisados mais detalhadamente em [54].
55
Modelos para Localização Indoor Baseados na Força do Sinal
Modelos de Propagação Indoor
Figura 16 - Ilustração do perfil de atraso da potência recebida típico e definição dos parâmetros de atraso [54].
Tipos de Desvanecimento:
O tipo de desvanecimento vivenciado por um sinal propagado através de um canal de
rádio móvel depende da natureza do sinal transmitido, bem como das características do
próprio canal. Ou seja, se dois sinais diferentes forem transmitidos no mesmo meio,
estes vão estar sujeitos a diferentes tipos de desvanecimento, de acordo com a relação
entre os parâmetros do sinal (perdas no percurso, largura de banda, período do símbolo,
entre outros) e os parâmetros do canal (atraso na propagação RMS e propagação
Doppler).
Um determinado canal possui desvanecimento seletivo em frequência quando o atraso
da propagação é maior que o período do símbolo. Isto ocorre sempre que as
componentes multicaminho recebidas de um símbolo se estender para além do tempo de
duração desses mesmos símbolos. Esta dispersão dos multicaminhos do sinal produz
uma interferência entre símbolos (ISI) que se designa de canal induzido ISI. Quando o
atraso de propagação é inferior ao período do símbolo, este canal possui um
desvanecimento plano e não existe uma distorção do canal induzido ISI. No entanto,
pode existir uma degradação do desempenho devido às componentes fasoriais
insolúveis adicionadas destrutivamente que produzem uma redução substancial na
proporção sinal-ruído (SNR) do recetor.
O desvanecimento rápido e lento é classificado com base na rapidez com que a banda
base do sinal transmitido se altera, quando comparado com a variação nas alterações dos
parâmetros elétricos do canal. Se a resposta ao impulso do canal se alterar a um ritmo
muito superior ao sinal transmitido, o canal pode ser considerado como sendo um canal
56
Modelos para Localização Indoor Baseados na Força do Sinal
Modelos de Propagação Indoor
de desvanecimento rápido. Caso contrário, o canal é considerado como sendo de
desvanecimento lento. É importante salientar que a velocidade da unidade móvel ou a
dos objetos, que utilizam o canal através de um sinal de banda de base, vai determinar
se o sinal vai sofrer um desvanecimento lento ou rápido.
4.2.1 Propagação Multicaminhos
Na generalidade dos sistemas de localização que recorrem às comunicações sem fios
para determinar a localização da pessoa/objeto, existe uma/várias estações fixas numa
posição previamente conhecida e uma ou mais estações móveis. Isto origina que a
comunicação entre estes dispositivos esteja sujeita a inúmeras interferências,
interferências que são conhecidas como dispersão, reflexão e difração do sinal. Estas
interferências são devidas há estrutura do próprio edifício, aos objetos contidos no
mesmo e principalmente devido às obstruções na linha de visão (LOS). Assim, o
fenómeno da propagação por multicaminhos pode ser descrito como o resultado das
ondas de rádio que chegam ao recetor móvel através de diferentes direções e
consequentemente possuem diferentes amplitudes, fases, e atrasos de propagação. O que
origina que o canal de rádio seja o resultado do somatório de todas as componentes dos
diferentes caminhos de propagação, que o sinal está sujeito. Neste caso, se o sinal de
( ), a resposta do canal pode ser descrita pela
entrada for um impulso unitário,
seguinte equação [58]:
( )
onde,
∑
(
)
,
9
representa os diferentes impulsos com atraso temporal relativos há resposta ao
impulso, cada um representado por uma atenuação e desfasamento relativamente ao
sinal original. Em que,
,
e
correspondem à atenuação, atraso na chegada, e fase
do percurso , respetivamente.
Contudo, a interferência que resulta dos multicaminhos é um fenómeno que degrada
bastante o desempenho dos sistemas de comunicações, e é pouco ou nada se pode fazer
para melhorar estas interferências. No entanto, se o meio for caracterizado
adequadamente, e se se possuir um bom conhecimento dos mecanismos de propagação
e a sua influência no desempenho do sistema, é possível escolher o sistema que melhor
se adequa para proporcionar um bom desempenho na propagação do sinal, e ao mesmo
tempo melhorar o serviço prestado.
57
Modelos para Localização Indoor Baseados na Força do Sinal
Modelos de Propagação Indoor
Existem três mecanismos básicos de propagação do sinal, que afetam a forma como esta
é efetuada nos sistemas de comunicações móveis, estes mecanismos de propagação são
[59]: reflexão; difração; e dispersão.
Reflexão:
A reflexão é o resultado da colisão de uma onda eletromagnética com um objeto de
dimensões muito superiores, quando comparado com o comprimento de onda da onda
propagada. A reflexão pode ser originada pela superfície do chão, paredes, e pelos
móveis. Como resultado da reflexão da onda eletromagnética, esta também pode estar
sujeita a uma refração parcial. Os coeficientes de reflexão e refração estão diretamente
relacionados com as propriedades materiais do meio de propagação, e normalmente
dependem da polarização da onda, do ângulo de incidência, e da frequência da onda
propagada.
Difração:
A difração ocorre quando o caminho de rádio entre o transmissor e o recetor é obstruído
por uma superfície com arestas vivas. Neste cenário, as ondas produzidas pela superfície
obstrutora vão estar presentes por todo o meio de propagação, até mesmo atrás do
obstáculo, originando uma flexão das ondas à volta do objeto. Para frequências
elevadas, a difração (tal como a reflexão) depende da geometria dos objetos, bem como
da amplitude, fase, e polarização da onda incidente no ponto de difração.
Dispersão:
A dispersão é o resultado da propagação da onda eletromagnética através de um meio
composto por objetos de pequenas dimensões, quando comparados com o comprimento
de onda do sinal transmitido, e onde existe um grande número de objetos por unidade de
volume. Estas ondas são originadas por superfícies rugosas, objetos pequenos, ou outras
irregularidades do canal. Se se possuir um bom conhecimento dos detalhes físicos dos
objetos, pode-se utilizar essa informação para prever com exatidão a força do sinal
disperso. Contudo, na maioria dos casos é possível ignorar o efeito da dispersão [60].
4.2.2 Modelos para as Perdas no Caminho
Quando se pretende caracterizar as perdas no caminho existem duas categorias
principais de modelos que se podem implementar: modelos empíricos (ou estatísticos);
e os modelos específicos para o local (ou determinísticos). A primeira categoria de
58
Modelos para Localização Indoor Baseados na Força do Sinal
Modelos de Propagação Indoor
modelos é baseada na caracterização estatística do sinal recebido. Estes são fáceis de
implementar, requerem menos capacidades computacionais e são menos sensíveis às
geometrias do ambiente em que estão inseridos. Os modelos específicos para o local por
seu lado, têm uma base física e por isso requerem uma grande quantidade de informação
sobre a geometria do ambiente em redor, do perfil do terreno, da localização do edifício
e do seu mobiliário, entre outras características relevantes. Por isso, estes modelos
requerem uma capacidade computacional considerável, mas proporcionam uma maior
precisão na localização.
Modelos Empíricos ou Estáticos para as Perdas no Caminho:
Ao contrário da propagação das ondas de rádio outdoor, a propagação indoor não é
influenciada pelo perfil do terreno, mas pode ser afetada pelo layout do edifício,
especialmente se este for construído em diferentes materiais. Como já foi referido,
objetos como paredes, janelas, portas interiores, mobília, entre outros, proporcionam
fenómenos de reflexão, refração, e difração na onda de rádio transmitida, fazendo com
que esta chegue ao recetor por vários caminhos.
O modelo que relaciona a distância-potência é o principal modelo de propagação para o
cálculo das perdas no caminho. Muitos investigadores estimaram a taxa de decaimento
pela relação da equação 8 [61–66]. Num ambiente fechado, quando o emissor e o
transmissor estão na mesma divisória e estão no campo de visão um do outro, o valor de
da equação 8, pode ser de 10 a 13. Por outro lado, se o transmissor e o recetor
estiverem em divisórias diferentes, pode assumir valores de três a quatro [61], [62],
[64], [65]. O valor de também pode variar consoante a frequência em que o sinal é
transmitido [62], e depende dos materiais utilizados no ambiente que se pretende
implementar o sistema [63].
Para aumentar a precisão dos sistemas, foram adicionados dois termos na equação 8,
tendo em vista incorporar a atenuação sofrida devido às paredes e ao chão. A nova
equação fica [67], [68]:
( )
(
)
( )
∑
onde,
( )e
)
( ),
∑
( )
10
( ) são o fator de atenuação de chão e da parede, respetivamente.
59
Modelos para Localização Indoor Baseados na Força do Sinal
Modelos de Propagação Indoor
Como se pode observar na equação 10 as perdas no caminho da propagação são uma
função da distância e define duas regiões distintas para ambientes indoor [69]. Por outro
lado, se radiação eletromagnética incide sobre uma parede ou chão de uma forma
oblíqua, menos potência vai ser transmitida através da parede, quando comparado com
uma incidência normal. No trabalho [67] os termos
( )e
( ) foram alterados
de modo a considerar o ângulo de incidência dos sinais nas paredes e chãos. Nas
situações em que a estação base está no exterior do edifício, as perdas no caminho no
edifício são calculadas com base na referência [70].
Os modelos de propagação empíricos ou estatísticos aqui descritos são simples e fáceis
de implementar, e são bastantes utilizados em aplicações cuja precisão não é um fator
determinante.
Modelos de Perdas no Caminho Específicos para um Local:
Os modelos de propagação específicos do local, também denominados modelos
determinísticos, são baseados na teoria da propagação das ondas eletromagnéticas. Ao
contrário dos modelos estatísticos, os modelos específicos do local não dependem de
medições extensivas, mas sim de um conhecimento aprofundado do meio, estes
modelos fornecem uma previsão bastante precisa da propagação do sinal.
Na teoria, resolvendo as equações de Maxwell é possível calcular exatamente as
características das ondas eletromagnéticas. Mas, este cálculo requer a utilização de
operações matemáticas complexas e uma grande capacidade computacional para
processar os dados. Uma aplicação deste método pode-se constatar em [71].
a) Técnica Ray-Tracing
A técnica do traçado dos raios é baseada na geometria ótica (GO), que pode ser
facilmente aplicada como um método aproximado para a estimativa dos níveis de alta
frequência dos campos eletromagnéticos. Nesta técnica assume-se que a energia pode
ser considerada como sendo radiada através de tubos infinitamente pequenos,
normalmente chamados de raios. Estes raios são normais à superfície do sinal de igual
potência. Eles encontram-se ao longo da direção de propagação e viajam em linhas
retas, desde que o índice de refração relativa do meio seja constante. Assim, a
propagação do sinal pode ser modelada através da propagação de raios. Quando se
utiliza o conceito traçado dos raios, os raios podem ser lançados de um transmissor, e a
interação dos raios pode ser descrita recorrendo às teorias bem conhecidas da reflecção
60
Modelos para Localização Indoor Baseados na Força do Sinal
Modelos de Propagação Indoor
e da refração, e da interação com meio em redor. Nos GO, apenas os raios que sofrem
reflexão e retração diretamente são considerados. Isto pode originar áreas de transição
abruptas, que correspondem às fronteiras das regiões onde existem esses raios. A teoria
da difração geométrica (GTD) e a sua extensão uniforme (UTD) [72], complementam a
teoria GO ao introduzir um novo género de raios, conhecidos como os raios difratados.
Estes raios têm como objetivo remover as descontinuidades no campo e introduzir uma
correção apropriada ao campo, especialmente nas regiões conhecidas como campo zero
já previstas na GO.
Os modelos de raios recorrem a dois conceitos básicos: o princípio de Fermat; e o
princípio do campo local. O princípio de Fermat afirma que os raios seguem o caminho
mais curto desde o ponto de origem até o ponto do campo, por outro lado, o princípio
dos campos locais afirma que os raios de altas frequências produzem reflexão, refração
e difração quando colidem com uma superfície. Isto depende unicamente das
propriedades elétricas e geométricas do dispersor na vizinhança imediata do ponto de
interação.
O método do traçado dos raios é amplamente utilizado em modelos de propagação e na
conceção de sistemas. Este é mais preciso quando o ponto de observação está afastado
vários comprimentos de onda do dispersor mais próximo. Os dispersores são assumidos
como sendo grandes, quando comparados com o comprimento de onda. Existem dois
tipos do método do trajeto dos raios: o método da imagem; e o método do traçado dos
raios por força bruta. Este métodos são detalhados em [54].
b) Modelos FDTD
O algoritmo do traçado dos raios, que é baseado nos GO e normalmente
complementado pelo UTD, proporciona uma opção relativamente simples para a
propagação de rádio. No entanto, é bem conhecido que o GO proporciona bons
resultados para objetos elétricos de grandes dimensões, e o UTD apenas é rigoroso para
fatias condutoras perfeitas. Assim, para complexas estruturas com perdas, o método do
traçado dos raios não é capaz de prever corretamente os campos de dispersão. Outro
grande problema, é que em meios de comunicação muito complexos, as antenas
transmissoras e recetoras costumam ser instaladas próximas de estruturas cujas
propriedades dos materiais são muito complexas, o que implica a impossibilidade de
utilizar soluções assintóticas. Contudo, estes problemas podem ser resolvidos
61
Modelos para Localização Indoor Baseados na Força do Sinal
Modelos de Propagação Indoor
numericamente recorrendo às equações de Maxwell. Em particular ao método das
diferenças finitas no domínio do tempo (FDTD). O método FDTD possui diversas
vantagens, entre elas as mais importantes são: é um método preciso; proporciona uma
solução completa para todos os pontos do mapa; e permite saber informações sobre a
cobertura do sinal numa determinada região.
No caso de ambientes outdoor, devido à sua simplicidade é normalmente utilizado o
método FDTD de duas dimensões [73]. Neste caso, foi desenvolvido um método
simples para corrigir a dispersão esférica das ondas. Uma comparação com as previsões
FDTD pode ser utilizada para avaliar e refinar os métodos baseados em GTD.
Em [74] foi utilizada uma fórmula reduzida do método FDTD (em vez de se utilizar as
seis componentes escalares do campo só foram utilizadas quatro), para prever as
características do canal dentro de um edifício. Para o cálculo da propagação indoor
foram estabelecidos os métodos 2.5D ou o FDTD multimodo, estes métodos permitem a
utilização de antenas com formatos diferentes [75].
Uma técnica hibrida é sugerida para proporcionar uma maior precisão na modelação da
propagação da onda de rádio [76], esta é baseada na combinação do método traçado dos
raios com o método FDTD. Esta técnica tem como princípio de funcionamento a
utilização da técnica traçado dos raios para efetuar uma análise em grandes áreas, e a
técnica FDTD para estudar as áreas próximas das estruturas onde existem materiais com
propriedades complexas, locais onde as soluções do método traçado de raios não tem
precisão suficiente.
Tal como, praticamente todos os métodos numéricos, o método FDTD requer grandes
quantidades de memória do computador para que seja possível rastrear a solução para
todos os pontos do meio, e cálculos extensivos para atualizar a solução a cada instante
de tempo. No entanto, a utilização de um método para a análise numérica precisa de
toda a região não é prática (requer muitos recursos computacionais), nem é necessária
para áreas amplas com poucos objetos.
c) Modelo Método dos Momentos
Os modelos baseados no traçado dos raios podem ser utilizados para prever a cobertura
do sinal com relativa precisão em edifícios grandes com um grande número de paredes
entre o recetor e o transmissor, por outro lado, o método dos momentos (MoM) é mais
adequado para edifícios mais pequenos e quando se pretende uma maior precisão. É
62
Modelos para Localização Indoor Baseados na Força do Sinal
Modelos de Propagação Indoor
possível combinar a utilização destes dois modelos e usufruir em simultâneo das
vantagens de ambos. A utilização do MoM é especialmente útil para cenários em que
existe uma grande diversidade de pequenos obstáculos, ou que os caminhos não podem
ser tidos em consideração no modelo do traçado dos raios [77], [78].
Quanto mais pequeno for o segmento espacial utilizado para os objetos, mais exatas são
as soluções numéricas determinadas pelo MoM. Devido às limitações de memória e do
tempo do CPU, o método MoM é especialmente utilizado para analisar objetos com
tamanho equivalente a dezenas de comprimentos de onda. Contudo, se o MoM for
utilizado para analisar objetos com dimensões equivalentes a poucos comprimentos de
onda, este método pode servir para testar e validar o método traçado dos raios. Um
exemplo da aplicação conjunta dos dois modelos é retratada em [77].
Um ponto crítico para os sistemas que incluem comunicações mistas, ou seja, indoor e
outdoor, passa pela transmissão dos sinais UHF através de paredes com janelas. Na
abordagem, baseada em MoM, presente em [79] foi utilizada uma abordagem diferente.
Durante as simulações, as paredes foram modeladas como sendo duas placas dielétricas
longas, suficientemente longas que permitiam ignorar a reflexão e difração provocadas
pelas arestas. Neste modelo não é feita nenhuma distinção entre as paredes de betão e de
tijolo, sendo tratadas de igual modo. O vido das janelas foi modelado assumindo que é
homogéneo e a caixilharia de alumínio é considerado como um condutor ideal. Os
resultados das simulações foram comparados com os de outros modelos e constatou-se
que este modelo possuía bons resultados.
Mais uma vez foi desenvolvida uma abordagem híbrida, que combinava o traçado dos
raios e o método dos momentos periódicos (PMM) para os objetos materiais, para
estudar a propagação das ondas no interior dos edifícios, as penetrações nos materiais, e
também as dispersões devidas às estruturas periódicas dos edifícios [80]. O PMM foi
utilizado para avaliar o reflexo do sinal transmitido e os coeficientes de reflexão das
estruturas periódicas. Por sua vez, o método traçado dos raios utilizava os valores
obtidos de modo a minimizar as interferências das estruturas periódicas.
d) Modelos de Redes Neuronais Artificiais
O principal problema dos modelos estatísticos prende-se com a sua baixa precisão, por
outro lado, os modelos específicos para o local têm o grande inconveniente da baixa
eficiência computacional (requerem muita memória e muito CPU para processar os
63
Modelos para Localização Indoor Baseados na Força do Sinal
Modelos de Propagação Indoor
cálculos). Assim, o uso das redes neuronais artificiais (ANN) veio demonstrar um bom
desempenho na resolução dos problemas das não-linearidades suaves dos conjuntos de
dados com ruído. Isto está relacionado com a dificuldade em prever o nível do campo,
pois os dados que são recolhidos das medições possuem sempre ruído. Uma outra
vantagem chave das redes neuroniais é o paralelismo intrínseco das mesmas, que
permite uma rápida avaliação das soluções apresentadas.
O modelo ANN [81] que está estruturado na forma de multicamadas de perceção, é
normalmente utilizado com doze entradas e uma saída. Este modelo foi desenvolvido
para prever a propagação das ondas em ambientes indoor. No caso retratado, um piso
plano bidimensional foi utilizado para uma base de dados com resolução de 10x10 cm.
Todas as regiões de interesse (como as paredes, corredor, laboratório, espaço exterior,
entre outras) foram classificadas em onze categorias distintas. Uma das entradas da
ANN representa a distância normalizada entre o transmissor e o recetor, adicionalmente
existe uma entrada para cada categoria de ambiente. As restantes entradas ou
representam o número de ocorrências normalizado (como portas e janelas), ou uma
percentagem adequada das diferentes categorias (paredes, corredores, por exemplo), que
existem no caminho em linha reta que separa o transmissor do emissor. O processo de
aprendizagem do sistema pode ser demorado, mas o processo de predição do nível de
campo é bastante rápido. A precisão deste tipo de sistemas de predição está diretamente
relacionada com as bases de dados do meio em que este está inserido.
Em [82], foram realizadas investigações teóricas acerca da adequabilidade das ANN
para a predição da intensidade do campo, baseando-se em dados topográficos e
morfográficos. Foi desenvolvido um processamento dos dados de entrada e saída eficaz,
através da utilização fórmulas determinísticas e heurísticas no treino do simulador das
redes neuronais. A rede utilizada neste trabalho foi semelhante à utilizada em [81].
Neste caso, as entradas do sistema eram a frequência, as alturas das antenas para a base
e para as estações móveis, respetivamente, e as distâncias entre as antenas. A saída do
sistema era a intensidade do campo magnético.
No entanto, a rede neuronal multicamada de [82] é um método bastante útil para estimar
as perdas na propagação, no entanto, este método tem a desvantagem da baixa
convergência e das soluções imprevisíveis durante a fase de aprendizagem. Para superar
estas desvantagens, foi proposta uma rede neuronal com funções de base radial (RBF),
cujos parâmetros têm uma representação linear, de modo a ser possível uma
64
Modelos para Localização Indoor Baseados na Força do Sinal
Modelos de Propagação Indoor
aprendizagem em tempo real e a atingir uma rápida convergência [83]. A rede neuronal
RBF é uma de duas camadas da rede recetiva de campo localizado, os nós de saída do
qual se formam uma combinação de funções de ativação radiais computadas pelo nó
oculto na camada. Com centros e pesos das conexões apropriados à rede RBF, é
possível criar uma rede capaz de formar a melhor aproximação a qualquer mapeamento
contínuo não-linear, até uma resolução arbitrária. Essa aproximação introduz uma
melhor capacidade de aproximação não-linear ao modelo de predição, tendo como
objetivo estimar com precisão as perdas na propagação ao longo de um ambiente
aleatório, baseando-se numa aprendizagem adaptativa dos dados recolhidos.
4.2.3 Modelos para o Desvanecimento em Pequena Escala
Grande parte dos modelos de desvanecimento recorre a processos estocásticos para
descrever a distribuição do sinal recebido. Estes modelos têm grande aplicabilidade para
a simulação dos canais de propagação e para estimar o desempenho dos sistemas em
ambientes homogéneos.
O desvanecimento de pequena escala está relacionado com alterações drásticas na
amplitude e fase do sinal, que podem ocorrer como resultado de pequenas alterações
(tão pequenas como metade do comprimento de onda do sinal) entre a separação física
do transmissor e do recetor. Estas alterações na onda do sinal recebido são descritas
estatisticamente por processos estocásticos.
A fim de obter uma boa compreensão do canal de propagação, torna-se importante um
estudo da distribuição das ondas dos sinais recebidos. Algumas das possibilidades de
modelar a distribuição da onda serão descritas a seguir. Contudo, tal como explicado e
realçado em [84], é necessário ter muito cuidado quando se utilizam modelos
estatísticos, uma vez que a falta de conhecimento do sistema não pode ser compensada
por uma distribuição estocástica.
Distribuição de Rician
Na literatura este modelo também pode ser referido como distribuição de Rice. Quando
existe uma componente dominante do sinal estacionário (não desvanecido), como
ocorre no caso de um percurso de propagação em linha de visão, a distribuição do
desvanecimento é Rician. A distribuição de Rician é dada pela seguinte expressão:
65
Modelos para Localização Indoor Baseados na Força do Sinal
Modelos de Propagação Indoor
( )
onde,
{
[
]
(
)
11
é a amplitude da onda do sinal recebido,
sinal de multicaminhos,
é a potência média prevista do
é o pico da amplitude do sinal dominante, e
( ) é a
função de Bessel modificada do primeiro tipo e de ordem zero. A distribuição de Rician
é frequentemente descrita em termos de um parâmetro (K), que é definido como a
relação entre a potência determinística do sinal e a variância dos multicaminhos. E é
calculado pela seguinte equação [59]:
(
)
.
12
é conhecido como o fator de Rician, e especifica a distribuição completamente.
Também é possível estimar o valor do fator de Rician ( ) de um sinal através das
medições da potência do sinal recebido em função do tempo. Uma abordagem que
permite fazer essa estimativa, passa por calcular as distribuições referentes às medições
dos dados e comparar esses resultados com um conjunto de hipóteses de distribuição,
utilizando um teste de ajuste adequado para o efeito. Outra opção passa por calcular
uma
estimativa
de
probabilidade
máxima
utilizando
um
algoritmo
espectável/maximização. No entanto, estas abordagens são um bocado complexas e
morosas. Foi desenvolvido um outro método muito mais simples e rápido, este baseia-se
no cálculo do primeiro e segundo momento de dados de uma série temporal. Este
método é bastante exato nas situações em que estimativas perfeitas dos momentos do
invólucro de Rician estão disponíveis. Nesse caso, o fator
só pode ser obtido
igualando implicitamente uma relação dos momentos medidos com uma função
complexa de
. Por contraste, o método descrito em [85] produz uma expressão de
explícita e bastante simples, em termos dos momentos medidos.
Distribuição Rayleigh
À medida que o sinal dominante na distribuição Ricean enfraquece, o sinal composto
assemelha-se a um sinal de ruído que tem a onda da distribuição Rayleigh. Nos canais
de rádio móveis, a distribuição Rayleigh é amplamente utilizada para descrever
estatisticamente a natureza de tempo variável da onda recebida do sinal de
desvanecimento plano, ou de uma componente individual dos multicaminhos. A
66
Modelos para Localização Indoor Baseados na Força do Sinal
Modelos de Propagação Indoor
distribuição Rayleigh tem uma função de densidade de probabilidade que é expressa
por:
( )
(
{
)
13
A probabilidade de a onda de um sinal recebido não exceder o valor específico R, é
dada pela função de distribuição cumulativa:
( )
onde,
(
)
∫
(
( )
é a amplitude da onda do sinal recebido, e
)
,
14
é a potência média prevista do
sinal de multicaminhos.
Como os dados do desvanecimento são geralmente medidos no âmbito das áreas, não
podem ser assumidas quantidades para uma distribuição particular. Normalmente é
preferida a utilização do valor da mediana em detrimento dos valores médios, e é fácil
de comparar diferentes distribuições do desvanecimento.
Modelo de Desvanecimento Log-Normal
Este método é utilizado para quantificar a distribuição dos raios que sofreram múltiplas
reflecções e difrações durante o percurso entre o transmissor e o recetor. A função da
densidade de probabilidade log-normal pode ser expressa como:
( )
onde,
{
[
( )
√
é o valor da mediana, e
]
}
,
15
é o desvio padrão da distribuição normal
correspondente, que é obtido através da mudança de variável
( ) [86]. Técnicas
como o método Monte Carlo e o método Schwartz e Yeh foram desenvolvidas para
simular a soma da potência das componentes log-normal [87].
Modelo Suzuki
O modelo de Suzuki combina duas distribuições, a distribuição log-normal e a
Rayleigh. Este modelo proporciona uma aproximação mais precisa da soma do
complexo correlacionado log-normal, para uma grande variedade de comportamentos
do canal. Normalmente, a distribuição Rayleigh é obtida a partir de dois processos
normais estatisticamente independentes,
( ) e
( ), com funções de auto
correlação idênticas, de acordo com a relação:
67
Modelos para Localização Indoor Baseados na Força do Sinal
Comparação dos Modelos
( )
√
( )
( ),
16
onde, ( ) pode ser considerado como o invólucro de um complexo processo de valor
( )e
aleatório normal, λ(t). O requisito da independência estatística entre
( )é
idêntico à necessidade de simetria da potência espectral para λ(t). A potência recebida,
calculada ao longo de um período de alguns segundos, pode variar consideravelmente,
devido às variações do efeito de sombreamento. Para adaptar o modelo a este
comportamento, o processo ( ) é substituído pelo produto ( )
( )
processo log-normal ( ( )
variância
e uma média
( )
) é definido pelo processo normal
( ), onde o
( ), com uma
. O processo do produto com esta distribuição singular da
amplitude de densidade é chamado de processo de Suzuki, e é calculado por [88]:
( )
onde,
é o desvio padrão e
∫
(
)
[
√
(
( )
)
]
,
17
é a amplitude. Por outro lado, assumir a independência
estatística nem sempre corresponde às condições reais de propagação pelos
multicaminhos da onda, assim, este modelo foi alterado [89], e simulado [90].
4.3 Comparação dos Modelos
Ao longo deste capítulo foram apresentados diversos modelos que permitem estimar a
posição de um utilizador/objeto recorrendo ao parâmetro da força do sinal. Uma
característica genérica de todos estes sistemas reside no facto de todos serem afetados
pelo meio. Outro fator que influência o desempenho destes modelos consiste na
variação do valor da força do sinal ao longo do tempo, ou seja, mesmo que as condições
do ambiente não se alterem o valor lido da forçado sinal (para a mesma posição), vai
variar ao longo do tempo. Devido a esta variação do valor da força do sinal, são
introduzidos erros no cálculo da posição do utilizar.
Outra característica destes sistemas é que em ambiente não estruturados, como é o
objetivo desta dissertação, os modelos existentes não proporcionam uma boa precisão
na localização, que é um requisito inicial do sistema. Para além disso a maioria destes
sistemas exige parâmetros da comunicação que o BitCloud não fornece, este apenas
fornece o valor referente ao RSSI da ligação.
68
Modelos para Localização Indoor Baseados na Força do Sinal
Comparação dos Modelos
Atendendo a estas circunstâncias, e devido às limitações da placa de desenvolvimento
AVR RZ Raven na obtenção dos parâmetros específicos à receção da onda propagada.
Assim, a melhor solução, mesmo contrariando grande parte dos objetivos inicias
propostos para esta dissertação, passa por utilizar o método de fingerprinting.
69
Modelos para Localização Indoor Baseados na Força do Sinal
Comparação dos Modelos
70
5 Conceção e Implementação
Como referido no capítulo anterior, o sistema proposto para a determinação da
localização vai-se basear na técnica de fingerprinting. Ao longo deste capítulo serão
descritos todos passos necessários para a conceção do referido sistema. Numa fase
inicial, vai-se proceder à identificação dos requisitos e das restrições do sistema a
desenvolver, bem como a especificação do hardware e software. Numa fase posterior
serão utilizados fluxogramas para descrever o funcionamento do sistema proposto.
5.1 Requisitos do Sistema
Os requisitos são um conjunto de informações vitais para o projeto e implementação do
sistema, estas indicam como um sistema deve atuar quando está sujeito a certas
situações. Existem dois tipos de requisitos: requisitos funcionais; e requisitos não
funcionais. Os requisitos funcionais especificam as ações que o sistema deve ser capaz
de executar quando está sujeito a determinadas condições, por outro lado, os requisitos
não funcionais estão relacionados com a qualidade do sistema a ser desenvolvido, ou
seja, especifica os atributos físicos do sistema e não as funcionalidades do mesmo.
Assim, o sistema a ser desenvolvido deve apresentar os seguintes requisitos funcionais:
O sistema deve ser capaz de comunicar mesmo que existam paredes a separar o
transmissor do recetor;
A apresentação da posição do utilizador deve ser em tempo real, no terminal de
monitorização;
O erro máximo no cálculo da posição do utilizador deve ser de 1-2m;
A alimentação do sistema deve ser independente da rede elétrica.
Os requisitos não funcionais do sistema são:
O tamanho do dispositivo a ser transportado deve ser de reduzidas dimensões;
Os diferentes módulos de comunicação devem ser robustos;
O interface com o utilizador deve ser agradável e intuitivo;
O dispositivo móvel de ter um baixo consumo energético.
71
Conceção e Implementação
Restrições do Sistema
5.2 Restrições do Sistema
Para a conceção do sistema de localização foram colocadas algumas restrições, tanto ao
nível do software como do hardware utilizado. Estas restrições condicionam o
desempenho global do sistema e definem como esse sistema é desenvolvido. Para o
sistema proposto foram colocadas as seguintes restrições:
Utilização da linguagem de programação C# para o desenvolvimento da
aplicação de monitorização da posição do utilizador;
Utilização da placa de desenvolvimento da Atmel a AVR RZ Raven, e
consequentemente a tecnologia de comunicações sem fios ZigBee (BitCloud),
para a determinação da posição do utilizador;
A determinação da localização do utilizador deve basear-se na técnica de
fingerprinting;
Utilização da linguagem de programação C para a comunicação entre os
diferentes dispositivos.
5.3 Especificação de Hardware
Para o desenvolvimento do sistema de localização foi proposta a placa de
desenvolvimento AVR RZ Raven. Este kit é composto por dois tipos de placas: a AVR
Raven que tem uma estrutura igual à presente na Figura 17; e RZUSBStick que contem
um interface USB para a comunicação com o computador e um microcontrolador para
comunicação ZigBee. A placa AVR Raven foi desenvolvida sob a forma de um
monobloco (Figura 17) e contem dois microcontroladores, o ATmega 3290P que é
responsável pelo interface com o LCD, com o sensor de temperatura e com o joystick. O
segundo microcontrolador é responsável pelo interface com o porto de entrada/saída, e
com o módulo AT86RF230-ZU que lida com as comunicações ZigBee. Para o
desenvolvimento de aplicações sem fios é fornecida uma estrutura da pilhar protocolar
ZigBee (Figura 18), o BitCloud, que é responsável pela gestão das comunicações sem
fios que operam na banda de frequência dos 2.4GHz. Tal como no ZigBee tradicional, o
BitCloud suporta três dispositivos: o coordenador (normalmente é o RZUSBStick);
routers; e os end device.
72
Conceção e Implementação
Especificação de Hardware
Figura 17 - Diagrama da Raven.
Figura 18 - Arquitetura da pilha protocolar do BitCloud [91].
O BitCloud é responsável pela gestão da rede, fornecendo à camada de aplicação (APL)
as informações necessárias para o utilizador. Deste modo, o utilizador pode abstrair-se
das especificações do protocolo e da gestão da rede, fazendo com que o
desenvolvimento das aplicações com recurso às comunicações sem fios seja bastante
rápido. Por outro lado a utilização desta placa de desenvolvimento suprime a
necessidade de utilizar qualquer outro hardware, tornando o desenvolvimento do
sistema
73
Conceção e Implementação
Especificação de Software
5.4 Especificação de Software
Nesta secção é especificado o software necessário para implementar o sistema de
localização. O sistema proposto só apresenta uma estação para a monitorização da
posição do utilizador, assim, a pessoa responsável pela monitorização da posição do
utilizador deve efetuar algumas ações de modo a colocar o sistema no correto
funcionamento. Na Figura 19 estão representadas as funcionalidades que o monitor
pode executar.
Figura 19 - Funcionalidades do sistema do ponto de vista do monitor.
Do ponto de vista da aplicação esta deve assegurar algumas funcionalidades (calcular a
posição do utilizador, adicionar remover routers, fazer pedidos, por exemplo), na Figura
20 estão representados os diferentes módulos de software e suas funcionalidades que
permitem uma interação do utilizador com o sistema.
74
Conceção e Implementação
Visão Global do Sistema
Figura 20 - Funcionalidades suportadas pelo posto de monitorização.
5.5 Visão Global do Sistema
Após o levantamento de todas as informações relevantes para o sistema (restrições e
requisitos), torna-se necessário idealizar o sistema a desenvolver. Resumidamente, este
sistema deve ser capaz de determinar a localização de um utilizador dentro de um
edifício, para tal definiu-se que a técnica a utilizar seria a técnica de fingerprinting. Para
a implementação deste sistema identificaram-se três entidades com comportamento e
funções diferentes, para simplificar utilizou-se uma nomenclatura semelhante à utilizada
nas redes ZigBee para definir o papel dessas entidades. Assim, no sistema proposto
existem as seguintes entidades:
Coordenador, o seu funcionamento é exatamente igual ao coordenador de uma
rede ZigBee, este é responsável por iniciar a rede e definir os parâmetros da
mesma. O coordenador está ligado diretamente ao posto de monitorização
(computador) por uma porta USB, pelo que corresponde ao módulo
RZUSBStick do kit AVR RZ Raven. A comunicação entre o módulo e o
computador é uma comunicação série, pelo que é necessário emular a porta USB
para uma porta série (o driver para emular a porta USB é fornecido juntamente
com o software do kit);
Routers, estes têm a função de estabelecer a comunicação com o dispositivo
transportado pelo utilizador. Esta comunicação deve ser efetuada a pedido do
coordenador, e tem como objetivo obter o valor RSSI da ligação bem como
75
Conceção e Implementação
Visão Global do Sistema
outras informações relevantes, como por exemplo a temperatura do ambiente em
que o utilizador está inserido.
Users, o funcionamento destes dispositivos é em tudo idêntico ao dos routers, de
facto o software é praticamente igual. A necessidade de utilizar este dispositivo
está relacionada com o facto de o end device não ser capaz de estabelecer
ligações com vários routers, só permite que haja comunicações com um
dispositivo. Assim, a entidade user só responde a pedidos efetuados pelos
routers.
Na Figura 21 estão representadas as diferentes entidades do sistema, bem como uma
visão global do seu funcionamento. O coordenador e o centro de monitorização estão
representados pelo monitor, os routers pelas antenas e o user é o bombeiro. É também
exemplificado o processo de determinação do valor RSSI, em que a aplicação faz um
pedido a um dos routers e esse comunica com o user determinado pela aplicação,
calcula o valor do RSSI e envia essa informação, juntamente com outras relevantes,
para o coordenador. Este por sua vez envia essa informação para a aplicação.
Figura 21 - Visão global do sistema.
76
Conceção e Implementação
Centro de Monitorização
5.6 Centro de Monitorização
A aplicação centro de monitorização é “coração” de todo o sistema de localização, ela é
responsável pelo tratamento dos dados recebidos pelo coordenador, enviar pedidos para
o coordenador, calcular a posição do utilizador e funciona como interface com o
monitor para este efetuar as operações necessárias para colocar o sistema em
funcionamento, bem como monitorizar a posição dos utilizadores. Tal como ilustrado na
Figura 21 o centro de monitorização divide-se em três subsistemas: o subsistema da
gestão dos módulos de comunicação; o subsistema da gestão do módulo do bombeiro; e
o subsistema de monitorização.
5.6.1 Interface com o Coordenador
Para estabelecer a comunicação série entre o coordenador e o centro de monitorização é
necessário selecionar todos os parâmetros da comunicação (baud rate, paridade, stop
bit, por exemplo), depois de definidos esses parâmetros é necessário escolher a porta
COM a utilizar. No fluxograma da Figura 22 está representado o processo de
estabelecimento da comunicação série.
77
Conceção e Implementação
Centro de Monitorização
Figura 22 - Fluxograma da inicialização da porta série.
Para aumentar a segurança das comunicações sem fios, e evitar que os dados sejam
intercetados por outras pessoas, o BitCloud utiliza um mecanismo de encriptação de
dados. Assim, para que seja possível tratar os dados recebidos convenientemente é
necessário descodificar os mesmos, no fluxograma da Figura 23 está representado o
algoritmo que permite descodifica-los.
78
Conceção e Implementação
Centro de Monitorização
Figura 23 - Algoritmo para a descodificação dos dados recebidos pela porta série.
79
Conceção e Implementação
Centro de Monitorização
5.6.2 Adicionar Entidades ao Sistema
Depois de devidamente tratados os dados recebidos pela porta série é necessário
identificar a qual dispositivo corresponde a trama recebida. Esta identificação tem por
base um parâmetro designado de ‘messageType’, em que a trama do coordenador é
identificada pelo valor 0, o router pelo valor 1 e o user pelo valor 2. Depois de
corretamente identificadas os dispositivos é necessário verificar se esse dispositivo já
existe, se sim são atualizados os parâmetros que variam no tempo (temperatura, RSSI,
por exemplo). Caso não existam, são criados. A informação recebida relativamente ao
coordenador não é tratada, visto que o coordenador não fornece nenhuma informação
relevante para a aplicação. No fluxograma da Figura 24 está representado todo o
processo de tratamento das tramas recebidas bem como a identificação dos dispositivos.
Figura 24 - Processamento das tramas recebidas pela porta série, e identificação dos respetivos dispositivos.
No instante em que se inicia a comunicação série, o sistema fica à “espera” que lhe
sejam adicionados routers, uma vez que é necessário introduzir a localização destes.
Com recurso a um timer, o sistema ciclicamente vai verificar se existe algum router no
sistema que não tenha a sua localização atribuída. Caso exista um router nestas
80
Conceção e Implementação
Centro de Monitorização
condições, é-lhe atribuído um número de identificação e é esperado que o monitor
introduza as suas coordenadas. No fluxograma da Figura 25 está representada essa
rotina.
Figura 25 - Rotina que permite verificar se existe algum router sem coordenadas atribuídas.
5.6.3 Comunicação com os Users
Logo que o primeiro user seja adicionado ao sistema, e desde que um número mínimo
de routers tenha sido adicionado com sucesso, o sistema ciclicamente deve efetuar
pedidos a esse user de modo a determinar o valor RSSI da ligação. Neste caso o sistema
efetua um pedido a um router de cada vez, para este comunicar com o user pretendido.
De seguida determina qual o próximo router que vai comunicar com o user. No
fluxograma da Figura 26 está representada a rotina que envia os pedidos ao coordenador
pela porta série, para pedir ao router que estabeleça a comunicação com o user de modo
a receber os parâmetros da ligação.
81
Conceção e Implementação
Centro de Monitorização
Figura 26 - Rotina para fazer pedidos ao dispositivo user.
Quando o dispositivo user recebe uma trama, este deve determinar o valor RSSI da
ligação e enviar esse valor, juntamente com as restantes informações dos sensores, para
o router que lhe fez o pedido. No fluxograma da Figura 27, estão representadas as
etapas dessa rotina.
Figura 27 - Rotina para o envio da informação referente aos parâmetros do user.
82
Conceção e Implementação
Centro de Monitorização
5.6.4 Criação do Mapa de Fingerprinting
Com as comunicações validadas, chega a fase de criar o mapa de fingerprinting para
auxiliar no cálculo da posição do utilizador. Nesta fase o sistema ainda não está
operacional e é necessário recolher os dados em vários pontos do local. Como um dos
grandes problemas dos sistemas de localização baseados na força do sinal reside no
facto de o valor de RSSI variar ao longo do tempo, por isso é necessário recolher vários
valores para cada localização de modo a estimar um valor médio para aquele local,
deste modo, tenta-se minimizar os erros das medições. No fluxograma da Figura 28 está
representado o algoritmo que estima o valor médio da força do sinal para cada posição.
Figura 28 - Atualização da base de dados.
5.6.5 Estimativa da Posição
Já com o mapa de fingerprinting criado, torna-se então possível calcular a posição do
utilizador. Esta é a etapa usualmente designada de fase online, em que os valores
obtidos das comunicações router-user são analisados e comparados com os valores
existentes na base de dados. Pela análise da menor diferença é estimada a posição do
83
Conceção e Implementação
Centro de Monitorização
utilizador. No fluxograma da Figura 29 está representada a rotina que calcula a posição
do utilizador.
Figura 29 - Rotina que realiza o cálculo da posição do utilizador.
84
6 Testes e Resultados
Com base nos fluxogramas apresentados no capítulo anterior, foi desenvolvida uma
aplicação de monitorização da posição do utilizador. Neste capítulo serão expostos
alguns dos testes e resultados efetuados. A estrutura deste capítulo será sob a forma de
um manual de utilização, permitindo uma fácil leitura bem como uma noção do
funcionamento do sistema por parte do leitor utilizador.
6.1 Iniciar a Comunicação Série
A primeira etapa quando se inicia o sistema passa pelo estabelecimento da comunicação
entre o centro de monitorização e o coordenador. Como já anteriormente referido, a
comunicação entre estes sistemas é efetuada recorrendo ao protocolo série, para tal é
utilizado um driver, que é fornecido pela Atmel, que proporciona uma emulação da
porta USB para uma porta série. Na Figura 30 está representada a form que permite a
escolha dos parâmetros de comunicação referentes à comunicação série, bem como a
possibilidade de selecionar a porta COM desejada para o estabelecimento da
comunicação.
Figura 30 - Form da inicialização da comunicação série.
85
Testes e Resultados
Iniciar a Comunicação Série
Para validar se as comunicações e o algoritmo de descodificação dos dados estavam a
funcionar corretamente, recorreu-se à ferramenta de debug do programa Visual Studio
para verificar se os dados recebidos pela comunicação série eram os espectáveis. O
resultado da leitura dos dados recebidos pela porta série, já com a etapa de
descodificação concluída, pode ser observado na Figura 31.
Figura 31 - Resultado dos dados recebidos pela porta série, já com a etapa da descodificação realizada.
Pela análise da Figura 31, pode concluir que esta trama corresponde a um router (o
primeiro byte recebido é ‘1’, que corresponde ao valor do ‘messageType’ designado
para os routers. Pela análise dos dados recebidos pode-se obter valores de outros
parâmetros, como por exemplo, o endereço longo atribuído pelo coordenador, o
endereço curto, o PANid da rede, a temperatura do local, a tensão da bateria, entre
outros parâmetros.
86
Testes e Resultados
Introduzir as Coordenadas dos Routers
6.2 Introduzir as Coordenadas dos Routers
Depois de iniciada a comunicação série é necessário introduzir a posição do router, pelo
processo explicado no capítulo anterior, sempre que é adicionado um novo router ao
sistema e desde que outro router não esteja pendente, no caso de estar pendente é
necessário introduzir primeiro as coordenadas desse router e só depois é que irá ser
apresentada a identificação do novo router adicionado ao sistema. Na Figura 32 está
representada a form que permite a introdução da informação referente à posição do
router. É de salientar que o botão que permite finalizar a adição desse router ao sistema
só está ativado caso sejam validadas as informações introduzidas referentes à
localização do router. Do mesmo modo, o botão que permite iniciar a localização só
está ativo assim que sejam introduzidos o número mínimo de router necessários para
calcular a posição do utilizador, o que não impede que possam ser adicionados mais
routers.
Figura 32 - Form que permite a introdução da posição do router.
6.3 Visualização da Informação Referente aos Routers e Users
Logo que se pressione o botão para iniciar a localização, vai ser apresentada uma nova
form onde é possível executar as seguintes tarefas:
87
Testes e Resultados
Visualização da Informação Referente aos Routers e Users
Visualização da informação referente aos routers (Figura 33). Nesta aba é
possível selecionar qual dos routers pretendemos visualizar os parâmetros. Entre
os parâmetros disponíveis temos: a posição do router; o valor LQI da ligação
entre o router e o coordenador; o valor RSSI da comunicação entre o router e o
coordenador; a tensão de alimentação, esta pode ser da bateria ou de uma fonte
de alimentação externa; e o valor da temperatura do local onde o router está
inserido;
Visualização da informação referente ao user (Figura 34). Tal como na aba dos
routers, aqui é possível selecionar qual o user que queremos visualizar a
informação. Entre os parâmetros disponíveis para visualização temos: a posição
estimada do user; o valor da tensão presente na bateria para a alimentação da
placa transportada pelo utilizador; e o valor da temperatura do ambiente onde o
utilizador se encontra;
Escolher um mapa de fingerprinting anteriormente criado. Com recurso ao botão
‘Choose Location’ podemos escolher um ficheiro correspondente a um local
onde já se tenha criado o MF. De salientar que neste caso os routers devem ser
colocados na mesma posição que estavam quando este MP foi criado;
Criar um mapa de fingerprinting. A outra opção que temos é a de criar um MF
para o local pretendido, neste caso é necessário clicar no botão ‘Create a
Location Database’ para abrir a form onde se vai tratar da informação recolhida
referente à posição do user e respetivos valores RSSI da comunicação userrouter.
88
Testes e Resultados
Visualização da Informação Referente aos Routers e Users
Figura 33 - Form de visualização da informação referente aos routers.
Figura 34 - Form de visualização da informação referente aos users.
89
Testes e Resultados
Visualização da Informação Referente aos Routers e Users
90
7 Conclusões e Trabalho Futuro
O grande desafio proposto para esta dissertação era o desenvolvimento de um sistema
de localização em ambientes não estruturados. Tanto no aspeto teórico como no aspeto
prático a realização de um sistema de localização nestas condições apresenta inúmeras
dificuldades. Isto porque, ao contrário dos ambientes outdoor, onde não existe grande
alternância das condições de propagação do sinal (se a área alvo estiver bem
delimitada), os ambientes indoor são “ricos” em estruturas que alteram (por vezes de
modo dramático) as condições de propagação do sinal, tornando a propagação do sinal
muito imprevisível.
Assim, era necessário identificar qual a tecnologia sem fios que melhor se adequava
para operar nestas condições. Depois de analisadas as tecnologias sem fios que
apresentavam maior potencial (UWB, Wi-Fi, ZigBee) para este tipo de aplicação,
constatou-se que a tecnologia UWB, em termos de potencial, superava em praticamente
todos os aspetos quando comparada com as restantes. Contudo, um aspeto em que as
demais tecnologias superavam a tecnologia UWB é o aspeto financeiro, o custo de
aquisição de um kit de desenvolvimento para operar com a tecnologia UWB é bastante
elevado (9995 USD), o que inviabilizou a seleção desta tecnologia para o
desenvolvimento do sistema proposto. Este foi o primeiro revés no desenvolvimento
deste projeto, uma vez que a tecnologia selecionada foi a ZigBee e esta apresenta
potencialidades muito inferiores à tecnologia UWB, adicionado à tecnologia outro
aspeto que limitou o desempenho do sistema foi a seleção da placa de desenvolvimento
(AVR RZ Raven), esta placa não possui um relógio com resolução suficiente que
permita utilizar as técnicas de localização por tempo de voo, assim, para o
desenvolvimento do sistema de localização só restava uma alternativa, a localização
com base no valor da força do sinal recebido.
Neste ponto, a “imposição” da utilização de modelos baseados na força do sinal aliado
às características do BitCloud, impossibilitou o requisito de determinar a localização em
ambientes não estruturados, pelo menos com a precisão pretendida. Uma vez que para
aumentar a precisão dos modelos de propagação do sinal é necessário fornecer
informações detalhadas sobre a constituição do meio. Assim, a única alternativa era
conceber um sistema baseado na técnica fingerprinting.
91
Conclusões e Trabalho Futuro
Tendo em consideração o principal objetivo desta dissertação: fazer um estudo dos
diversos sistemas de localização existentes, identificar as diferentes técnicas de
localização possíveis e um estudo detalhado das diferentes tecnologias sem fios. Esse
objetivo foi realizado com sucesso.
Assim, para ser possível desenvolver um sistema como o inicialmente proposto, deve
ser estudada a hipótese da utilização da tecnologia UWB bem como a possibilidade de
utilizar abordagens hibridas, como o sensor fusion, para aumentar a precisão do sistema.
A seleção da placa de desenvolvimento também tem de ser escolhida com bastante
cuidado, pois como foi possível verificar nesta dissertação, a placa de desenvolvimento
escolhida vai influenciar o desempenho global do sistema.
Também deve ser estudado um mecanismo para o cálculo automático das coordenadas
dos elementos router, como é natural para a aplicação em questão a localização dos
routers vai estar em constante alteração, outra questão preponderante está relacionada
com a falta de pontos de referência. O que inviabiliza a introdução manual das
coordenadas, além de ser um procedimento muito demorado está sujeito a muitos erros,
estes erros vão ser decisivos no desempenho global do sistema.
Outra questão importante passa pela criação de mecanismos de tolerância à falha. Em
situações de emergência é inconcebível que o sistema falhe, esta falha pode custar a
vida do bombeiro. Neste sentido deve ser estudada a hipótese da implementação de
mecanismos de tolerância à falha tanto em hardware como em software, de modo a
garantir
92
que
a
posição
do
bombeiro
está
sempre
atualizada.
Referências Bibliográficas
[1]
J. Hightower and G. Borriello, “Location sensing techniques,” IEEE Computer,
no. August, pp. 1–8, 2001.
[2]
A. Helfrick, Principles of Avionics, Third edit. 2004.
[3]
I. A. Getting, Perspective/navigation-The Global Positioning System, vol. 30,
no. 12. IEEE Computer Society Press, 1993, pp. 36–38, 43–47.
[4]
H. A. El-natour, E. Nationale, D. Aviation, and C. Tesa, “Impact of Multipath
and Cross-Correlation on GPS acquisition in Indoor Environments,” no. January, pp.
24–26, 2005.
[5]
“Melhorar
o
serviço
911.”
[Online].
Available:
http://www.fcc.gov/911/enhanced/.
[6]
R. Want, A. Hopper, V. Falcao, and J. Gibbons, “Active badge location system,”
ACM Transactions on Information Systems, vol. 10, no. 1, pp. 91–102, 1992.
[7]
A. Harter, A. Hopper, P. Steggles, A. Ward, and P. Webster, “The anatomy of a
context-aware application,” Proceedings of the 5th annual ACMIEEE international
conference on Mobile computing and networking MobiCom 99, vol. 1, no. 2, pp. 59–68,
1999.
[8]
A. Ward, A. Jones, and A. Hopper, A new location technique for the active
office, vol. 4, no. 5. IEEE, 1997, pp. 42–47.
[9]
“Technical description of dc magnetic trackers,” 2001.
[10]
F. H. Raab, E. B. Blood, T. O. Steiner, and H. R. Jones, “Magnetic Position and
Orientation Tracking System,” Ieee Transactions On Aerospace And Electronic
Systems, vol. AES-15, no. 5, pp. 709–718, 1979.
[11]
N. B. Priyantha, A. Chakraborty, and H. Balakrishnan, “The Cricket location-
support system,” Proceedings of the 6th annual international conference on Mobile
computing and networking MobiCom 00, vol. 2000, no. August, pp. 32–43, 2000.
[12]
P. Bahl and V. N. Padmanabhan, RADAR: an in-building RF-based user
location and tracking system, vol. 2, no. c. Ieee, 2000, pp. 775–784.
93
Referências Bibliográficas
[13]
J. Krumm, S. Harris, B. Meyers, B. Brumitt, M. Hale, and S. Shafer, Multi-
camera multi-person tracking for EasyLiving, vol. 6. IEEE Comput. Soc, 2000, pp. 3–
10.
[14]
G. Welch, G. Bishop, L. Vicci, S. Brumback, K. Keller, and D. Colucci, “The
HiBall Tracker: High-Performance Wide-Area Tracking for Virtual and Augmented
Environments,” in Proceedings of the ACM Symposium on Virtual Reality Software and
Technology, 1999, pp. 1–11.
[15]
“Ubisense homepage.” [Online]. Available: http://www.ubisense.net.
[16]
“Ultra
wideband
working
group
homepage.”
[Online].
Available:
http://www.uwb.org.
[17]
“Visão
geral
das
redes
sem
fios.”
[Online].
Available:
http://technet.microsoft.com/pt-br/library/cc784756(v=ws.10).aspx.
[18]
H. Gelke, “Wireless 480 Mbit/s UWB Link for Embedded Systems,” 2009.
[19]
Intel, “Ultra-Wideband ( UWB Technology ).” .
[20]
J. M. Wilson, “Ultra-Wideband / a Disruptive RF Technology ?” pp. 1–8, 2002.
[21]
H. F. Design, “A Summary of FCC Rules for Ultra Wideband,” 2005.
[22]
D. Porcino, “Ultra-Wideband Radio Technology : Potential and Challenges
Ahead,” no. July, pp. 66–74, 2003.
[23]
“Ultra-Wideband Technology and Test Solutions.”
[24]
R. Scholtz, Multiple access with time-hopping impulse modulation, vol. 2, no. c.
Ieee, 1993, pp. 447–450.
[25]
M. Z. Win and R. A. Scholtz, “Ultra-wide bandwidth time-hopping spread-
spectrum impulse radio for wireless multiple-access communications,” IEEE
Transactions on Communications, vol. 48, no. 4, pp. 679–689, 2000.
[26]
M. Z. Win and R. A. Scholtz, “Impulse radio: how it works,” IEEE
Communications Letters, vol. 2, no. 2, pp. 36–38, 1998.
[27]
P. C. Pinto and M. Z. Win, Spectral characterization of wireless networks, vol.
14, no. 6. 2007.
94
Referências Bibliográficas
[28]
A. F. Molisch, “Ultra-Wideband Communications: An Overview,” no. 329, pp.
31–42, 2009.
[29]
A. F. Molisch, “Ultrawideband Propagation Channels,” Proceedings IEEE, vol.
97, pp. 353–371, 2009.
[30]
A. F. Molisch, Ultrawideband propagation channels and their impact on system
design. Ieee, 2007, pp. K4– 1–K4– 5.
[31]
A. F. Molisch, Ultrawideband propagation channels-theory, measurement, and
modeling, vol. 54, no. 5. IEEE, 2005, pp. 1528–1545.
[32]
“Data Sheet PulsON 400 RCM,” 2011.
[33]
S. Gezici, G. B. Giannakis, H. Kobayashi, A. F. Molisch, H. V Poor, and Z.
Sahinoglu, “Localization via ultra-wideband radios: a look at positioning aspects for
future sensor networks,” IEEE Signal Processing Magazine, vol. 22, no. 4, pp. 70–84,
2005.
[34]
M. Z. Win and R. A. Scholtz, On the energy capture of ultrawide bandwidth
signals in dense multipath environments, vol. 2, no. 9. 1998, pp. 245–247.
[35]
D. Cassioli, M. Z. Win, and A. F. Molisch, The ultra-wide bandwidth indoor
channel: from statistical model to simulations, vol. 20, no. 6. IEEE, 2002, pp. 1247–
1257.
[36]
A. F. Molisch, J. R. Foerster, and M. Pendergrass, Channel models for
ultrawideband personal area networks, vol. 10, no. 6. 2003, pp. 14–21.
[37]
A. F. Molisch, D. Cassioli, C.-C. C. C.-C. Chong, S. Emami, A. Fort, B.
Kannan, J. Karedal, J. Kunisch, H. G. Schantz, K. Siwiak, and M. Z. Win, A
Comprehensive Standardized Model for Ultrawideband Propagation Channels, vol. 54,
no. 11. IEEE, 2006, pp. 3151–3166.
[38]
Y. P. Nakache and A. F. Molisch, Spectral shape of UWB signals - influence of
modulation format, multiple access scheme and pulse shape, vol. 4. 2003.
[39]
A. F. Molisch, “Wireless Communications,” 2005.
[40]
H. Lajos, T. Keller, M. Muenster, and B. J. Choi, “OFDM and MC-CDMA for
Broadband Multi-User Communications, WLANs and Broadcasting,” OFDM and
95
Referências Bibliográficas
MCCDMA for Broadband Multiuser Communications WLANs and Broadcasting. John
Wiley \&amp; Sons, Inc., p. 992, 2003.
[41]
“PulsON ® 400 Ranging & Communications Part Two : UWB Definition and
Advantages,” no. November. 2011.
[42]
“OSI
Model.”
[Online].
Available:
http://www.google.com/imgres?hl=en&sa=X&rlz=1C1ASUT_ptPTPT446PT446&tbm=isch&prmd=imvns&tbnid=l4dAPWI1HVKp3M:&imgrefurl=htt
p://computer.howstuffworks.com/osi1.htm&docid=z3AzwgdX0VcrsM&imgurl=http://s
tatic.ddmcdn.com/gif/osimodel.jpg&w=400&h=395&ei=sSaDUJWEFOrG0QXhq4HgBA&zoom=1&iact=hc&v
px=422&vpy=108&dur=360&hovh=145&hovw=148&tx=90&ty=139&sig=104163188
333373541182&page=1&tbnh=140&tbnw=142&start=0&ndsp=30&ved=1t:429,r:9,s:0,
i:165&biw=1536&bih=765.
[43]
S. Kaushik, “An overview of Technical aspect for WiFi Networks Technology,”
pp. 28–34.
[44]
S. Dhawan, “Analogy of Promising Wireless Technologies on Different
Frequencies,” no. AusWireless, 2007.
[45]
“Kioskea.net.”
[Online].
Available:
http://en.kioskea.net/faq/9081-wifi-
description-and-explanations.
[46]
“OpenLearn.”
[Online].
Available:
http://openlearn.open.ac.uk/mod/oucontent/view.php?id=397529&section=4.4.
[47]
P. Brenner, “A Technical Tutorial on the IEEE 802 . 11 Protocol,” 1997.
[48]
C. G. M. Bsnl, “WiFi and WiMax Break through in Wireless Access
technologies,” pp. 141–145, 1999.
[49]
“Crutchfield.”
[Online].
Available:
http://www.crutchfield.com/S-
nTxShGoBDhq/learn/learningcenter/home/wifi.html.
[50]
Z. Alliance, “ZIGBEE SPECIFICATION.” 2008.
[51]
“Topologias
da
rede
ZigBee.”
[Online].
Available:
http://www.google.com/imgres?hl=en&sa=X&rlz=1C1ASUT_ptPTPT446PT446&tbm=isch&prmd=imvns&tbnid=VWodq2DEng23CM:&imgrefurl=htt
96
Referências Bibliográficas
p://www.microgenios.com.br/site/index.php%3Foption%3Dcom_content%26view%3D
article%26id%3D64%26Itemid%3D93&docid=kZoy7RrQyr5yGM&imgurl=http://ww
w.microgenios.com.br/imagens/zigbee_aliance_rede.jpg&w=320&h=251&ei=BZMUNDjHpOIhQe6x4GwCQ&zoom=1&iact=hc&vpx=1100&vpy=354&dur=6863&ho
vh=200&hovw=255&tx=136&ty=94&sig=104163188333373541182&page=1&tbnh=1
24&tbnw=157&start=0&ndsp=25&ved=.
[52]
“Emerging Wireless Technologies: Ultra Wideband Communications.” .
[53]
“AVR
Raven.”
[Online].
Available:
http://www.atmel.com/tools/AVRRAVEN.aspx?tab=documents. [Accessed: 10-Mar2012].
[54]
T. K. Sarkar, Z. J. Z. Ji, K. K. K. Kim, A. Medouri, and M. Salazar-Palma, A
survey of various propagation models for mobile communication, vol. 45, no. 3. IEEE,
2003, pp. 51–82.
[55]
C. Systems, “Wi-Fi Location-Based Services — Design and Deployment
Considerations.” 2006.
[56]
H. L. Bertoni, Radio Propagation for Modern Wireless Systems. Prentice Hall
PTR, 2000, pp. 90–92.
[57]
J. B. Andersen, T. S. Rappaport, and S. Yoshida, Propagation measurements
and models for wireless communications channels, vol. 33, no. 1. IEEE, 1995, pp. 42–
49.
[58]
G. L. Turin, F. D. Clapp, T. L. Johnston, S. B. Fine, and D. Lavry, “A statistical
model of urban multipath propagation,” Vehicular Technology IEEE Transactions on,
vol. 21, no. 1, pp. 1–9, 1972.
[59]
T. S. Rappaport, Wireless Communications: Principles & Practice. Prentice Hall
PTR, 1996.
[60]
M. F. Catedra, J. Pkrez, and F. S. De Adana, “Efficient Ray-Tracing Techniques
for Three- Dimensional Analyses of Propagation in Mobile Communications :
Application to Picocell and Microcell Scenarios,” vol. 40, no. 2, pp. 15–28, 1998.
[61]
F. C. Owen and C. D. Pudney, “In-building propagation at 900 MHz and 1650
MHz for digital cordless telephones,” Antennas and Propagation, 1989. ICAP 89., Sixth
International Conference on (Conf. Publ. No.301). pp. 276–280 vol.2, 1989.
97
Referências Bibliográficas
[62]
P. Vlach, B. Segal, J. LeBel, and T. Pavlasek, “Cross-floor signal propagation
inside a contemporary ferro-concrete building at 434, 862, and 1705 MHz,” Antennas
and Propagation, IEEE Transactions on, vol. 47, no. 7. pp. 1230–1232, 1999.
[63]
S. E. Alexander, “Characterising buildings for propagation at 900 MHz,”
Electronics Letters, vol. 19, no. 20. p. 860, 1983.
[64]
R. Bultitude, “Measurement, characterization and modeling of indoor 800/900
MHz radio channels for digital communications,” IEEE Communications Magazine,
vol. 25, no. 6, pp. 5–12, 1987.
[65]
G. Hooghiemstra, L. Meester, and S. Sahid, A Statistical Model for Indoor
Multipath Propagation, vol. 5, no. 2. IEEE, 1987, pp. 128–137.
[66]
T. S. Rappaport and S. Sandhu, Radio-wave propagation for emerging wireless
personal-communication systems, vol. 36, no. 5. 1994.
[67]
K.-W. Cheung, J. H.-M. Sau, and R. D. Murch, “A new empirical model for
indoor propagation prediction,” Vehicular Technology, IEEE Transactions on, vol. 47,
no. 3. pp. 996–1001, 1998.
[68]
S. Y. Seidel and T. S. Rappaport, 914 MHz path loss prediction models for
indoor wireless communications in multifloored buildings, vol. 40, no. 2. IEEE, 1992,
pp. 207–217.
[69]
W. Honcharenko, H. L. Bertoni, J. L. Dailing, J. Qian, and H. D. Yee,
Mechanisms governing UHF propagation on single floors in modern office buildings,
vol. 41, no. 4. 1992, pp. 496–504.
[70]
S. Ruiz, Y. Samper, J. Perez, R. Agusti, and J. Olmos, “Software tool for
optimising indoor/outdoor coverage in a construction site,” Electronics Letters, vol. 34,
no. 22. pp. 2100–2101, 1998.
[71]
G. M. Whitman, K.-S. K. K.-S. Kim, and E. Niver, A theoretical model for radio
signal attenuation inside buildings, vol. 44, no. 3. 1995, pp. 621–629.
[72]
R. Luebbers, “Finite conductivity uniform GTD versus knife edge diffraction in
prediction of propagation path loss,” Antennas and Propagation, IEEE Transactions on,
vol. 32, no. 1. pp. 70–76, 1984.
98
Referências Bibliográficas
[73]
J. W. Schuster and R. J. Luebbers, “Comparison of GTD and FDTD predictions
for UHF radio wave propagation in a simple outdoor urban environment,” Antennas and
Propagation Society International Symposium, 1997. IEEE., 1997 Digest, vol. 3. pp.
2022–2025 vol.3, 1997.
[74]
G. D. Kondylis, F. De Flaviis, G. J. Pottie, and Y. Rahmat-Samii, Indoor
channel characterization for wireless communications using reduced finite difference
time domain (R-FDTD), vol. 3. IEEE, 1999, pp. 1402–1406.
[75]
A. Lauer, I. Wolff, A. Bahr, J. Pamp, and J. Kunisch, Multi-mode FDTD
simulations of indoor propagation including antenna properties, vol. 1. 1995.
[76]
Y. W. Y. Wang, S. Safavi-Naeini, and S. K. Chaudhuri, A hybrid technique
based on combining ray tracing and FDTD methods for site-specific modeling of indoor
radio wave propagation, vol. 48, no. 5. IEEE, 2000, pp. 743–754.
[77]
C.-F. Y. C.-F. Yang, B.-C. W. B.-C. Wu, and C.-J. K. C.-J. Ko, A ray-tracing
method for modeling indoor wave propagation and penetration, vol. 1, no. 6. 1998, pp.
907–919.
[78]
B. De Backer, H. Borjeson, F. Olyslager, and D. De Zutter, “The study of wave-
propagation through a windowed wall at 1.8 GHz ,” Vehicular Technology Conference,
1996. “Mobile Technology for the Human Race”., IEEE 46th, vol. 1. pp. 165–169
vol.1, 1996.
[79]
C.-F. Y. C.-F. Yang and B.-C. W. B.-C. Wu, Simulations and measurements for
indoor wave propagation through periodic structures, vol. 1, no. c. 1999, pp. 1–4.
[80]
Z. Sandor, L. Nagy, Z. Szabo, and T. Csaba, 3D ray launching and moment
method for indoor radio propagation purposes, vol. 1. IEEE, 1997, pp. 130–134.
[81]
A. Neskovic, N. Neskovic, and D. Paunovic, Indoor electric field level
prediction model based on the artificial neural networks, vol. 4, no. 6. 2000, pp. 190–
192.
[82]
K. E. Stocker, B. E. Gschwendtner, and F. M. Landstorfer, “Neural network
approach to prediction of terrestrial wave propagation for mobile radio,” Microwaves,
Antennas and Propagation, IEE Proceedings H, vol. 140, no. 4. pp. 315–320, 1993.
99
Referências Bibliográficas
[83]
P.-R. C. P.-R. Chang and W.-H. Y. W.-H. Yang, Environment-adaptation
mobile radio propagation prediction using radial basis function neural networks, vol.
46, no. 1. 1995.
[84]
T. K. Sarkar, M. C. Wicks, M. Salazar-Palma, and R. J. Bonneau, Smart
Antennas. New York: John Wiley and Sons, 2003.
[85]
L. J. Greenstein, D. G. Michelson, and V. Erceg, Moment-method estimation of
the Ricean K-factor, vol. 3, no. 6. 1999, pp. 175–176.
[86]
C. C. Hess, Handbook of Land-Mobile Radio System Coverage. Norwood:
Artech House, Inc.
[87]
A. Safak, “Statistical-Analysis of the Power Sum of Multiple Correlated Log-
Normal Components,” IEEE Transactions on Vehicular Technology, vol. 42, no. 1, pp.
58–61, 1993.
[88]
H.
Suzuki,
“A
Statistical
Model
for
Urban
Radio
Propogation,”
Communications, IEEE Transactions on, vol. 25, no. 7. pp. 673–680, 1977.
[89]
A. Krantzik and D. Wolf, Analysis of a modified Suzuki fading channel model.
1989.
[90]
M. Patzold, U. Killat, and F. Laue, “A Deterministic Digital Simulation Model
for Suzuki Processes with Application to a Shadowed Rayleigh Land mobile Radio
Channel,” European Sociological Review, vol. 17, no. 2, pp. 318–331, 2001.
[91]
“Atmel AVR2052: Atmel BitCloud Quick Start Guide.” [Online]. Available:
http://www.atmel.com/Images/doc8200.pdf.
100