APOSTILA
DO
SUCOSOFT – S4
MARÇO DE 2009
1
SUCOSOFT S4
O primeiro exercício no CLP PS4-201-MM1 e o de partida de motor trifásico por meio de
contator com acionamento por botões liga e desliga e com proteção por meio de relé térmico.
O programa utilizado é o Sucosoft S4 que possui 6 pastas de programação:
1 - Project Manager: faz o gerenciamento do programa;
2 – POU Editor: faz a edição do programa fonte (LD – FBD - IL);
3 - Topology Configurator: faz a edição da estrutura do CLP;
4 – Code Generation: faz a compilação do programa fonte para o programa executável;
5 - Test and Commissioning: faz a transferência do programa executável da CPU para o CLP;
6 – Form Editor: faz a impressão do programa na impressora.
A - Criação do Arquivo de Programação
A primeira pasta a ser aberta é a Project Manager e as demais pastas serão abertas na sequência
dada acima.
Na pasta Project Manager; clicar na opção Project e selecionar New.
Na caixa de diálogo New Project clicar em Select Directory.
No campo Directory é sugerido o caminho (path) C:\S4. Clicar Accept.
A caixa de diálogo New Project é aberta.
Digitar, após o caminho C:\S4, o nome do projeto. Podemos adotar como nome para o
1o exercício “EXERC01”. Vamos ter então: C:\S4\EXERC01
Nome: até 8 caracteres;
não utilizar . , ; - \ e espaços em branco;
não iniciar com algarismo.
Clicar em OK.
Deve aparecer então a estrutura do programa com o nome adotado.
Kompo.sys está marcada. Se não estiver marcá-la com o mouse.
Clicar novamente na opção Project e selecionar Exit.
Observar se a pasta
2
B – Edição do Programa Fonte
Entrar na pasta POU Editor, clicar na opção File e selecionar New.
Abre-se a caixa de diálogo New.
Clicar na opção Program e em seguida em New.
Deve então aparecer a tela de Programação dividida em duas Janelas:
- Janela esquerda - edição das variáveis.
- Janela direita: edição do programa.
Vamos iniciar com a janela da direita.
O programa pode ser escrito em uma das três linguagens aceitas:
IL - Instructions List.
LD - Ladder.
FBD – Function Block Diagram (portas lógicas).
A opção apresentada (default) é a IL.
Para mudar a linguagem para LD ou FBD clicar em Options e selecionar Programming
Language. Escolher LD.
A tela é mudada para o LD/FBD-Editor.
Montagem da Ladder para o EXERC01
Inicia-se a Ladder clicando no ícone
Surge na tela:
undef opd
undef opd
undef_opd: operador indefinido
(sem nome)
Para alterar o operador de aberto
acionar a barra de espaços.
para fechado
deve-se
Para dar nome ao elemento deve-se dar um duplo clique no elemento, o que fará abrir a caixa de
diálogo Name Element. Nesta caixa substituir o nome apresentado “undef_opd” pelo nome
escolhido. Clicar em OK.
Colocando os nomes LIGA no 1o elemento e MOTOR no 2o elemento vamos ter a Ladder:
LIGA
MOTOR
3
Para se inserir novos operadores em série na Ladder, deve-se selecionar com o mouse o local de
inserção e a seguir clicar no ícone indicado abaixo:
Repetindo esta operação 2 vezes, vamos obter:
LIGA
undef opd
undef opd
MOTOR
Para adicionar um elemento paralelo deve-se selecionar o operador onde será feito o paralelo
(no exemplo o elemento LIGA) e clicar no ícone indicado abaixo:
A Ladder terá o seguinte aspecto:
LIGA
undef opd
undef opd
MOTOR
RELE
MOTOR
undef opd
Atribuindo nomes aos operadores vamos ter:
LIGA
MOTOR
DESL
4
Declaração de Variáveis:
A declaração das variáveis é feita na janela à esquerda da tela (Syntax Controlled Variable
Editor).
Temos a seguinte tela:
Name
Type
Initial
Attribute
Address
Name:
Digitar o mesmo nome atribuído ao elemento na Ladder. O 1o elemento é LIGA.
Type:
Clicar na seta de rolagem e selecionar BOOL (booleano).
Variável booleana pode somente assumir dois valores: zero ou um.
Initial:
Deixar em branco.
Attribute:
Deixar em branco.
Address:
Fornecer o endereço do CLP. Os endereços podem ser de Entrada ou de Saída.
Entradas:
%I0.0.0.0.0
%I0.0.0.0.1
%I0.0.0.0.2
%I0.0.0.0.3
%I0.0.0.0.4
%I0.0.0.0.5
%I0.0.0.0.6
%I0.0.0.0.7
Saídas:
%Q0.0.0.0.0
%Q0.0.0.0.1
%Q0.0.0.0.2
%Q0.0.0.0.3
%Q0.0.0.0.4
%Q0.0.0.0.5
1a
2a
3a
4a
5a
6a
7a
8a
-
-
1a
2a
3a
4a
5a
6a
posição
posição
posição
posição
posição
posição
posição
posição
posição
posição
posição
posição
posição
posição
Após digitar esses dados para cada elemento clicar Add (adicionar à lista).
5
A lista completa será a seguinte:
LIGA
DESL
RELE
MOTOR
BOOL
BOOL
BOOL
BOOL
%I0.0.0.0.0
%I0.0.0.0.1
%I0.0.0.0.2
%Q0.0.0.0.0
Para se verificar a declaração completa clicar em Options e selecionar Free Mode.
Para retornar, clicar novamente em Options e selecionar Syntax Controlled Mode.
Terminada a declaração salvar o arquivo.
Clicar na opção File e selecionar Save as.
Abre-se a caixa de diálogo Save as.
Nesta caixa digitar o nome da POU. É conveniente adotar o mesmo nome do projeto, ou seja,
EXERC01. Clicar em OK.
Abre-se uma nova caixa Save POU as contendo o nome do arquivo POU. Clicar em OK.
Após salvar o arquivo é conveniente checar a existência de erros de sintaxe (não de lógica). Na
opção File, selecionar Syntax Check.
Se existir algum erro de sintaxe, abrirá uma caixa indicando os erros cometidos. Neste caso as
correções devem ser feitas e o arquivo salvado novamente.
Se não existirem erros, aparecerá a mensagem POU compiled error-free. Clicar em OK.
Para sair do modo de edição da POU clicar em File e selecionar Close.
Para sair do POU Editor clicar em File e selecionar Exit.
C - Edição da Configuração da Topologia
Entrar na pasta Topology Configurator, clicar na opção Configuration e selecionar New.
Abre-se a caixa de diálogo New configuration.
Digitar o nome do arquivo (é conveniente dar o mesmo nome do projeto, no caso EXERC01).
Em PLC type (tipo do CLP), selecionar PS4-201-MM1. Em seguida clicar OK.
Deve então aparecer a tela com o ícone do CLP.
Para gravar o arquivo de topologia, clicar em Configuration e depois selecionar Save as.
Aparece a caixa de diálogo Save file as e no campo nome do arquivo digitar o nome do
projeto (EXERC01). Clicar em OK.
Para sair da pasta Topology, clicar novamente em Configuration e selecionar Exit.
6
D - Compilação do Programa Fonte
Entrar na pasta Code Generation, clicar na opção Generate e selecionar New Make File
List.
Abre-se a caixa de diálogo New Make File com os programas do POU Editor e do Topology
Configurator. Verificar se os arquivos EXERC01.POE e EXERC.DCF aparecem como
nomes dos arquivos. Clicar em OK.
Deve então aparecer a caixa de diálogo Program Code Generation com a mensagem “Make
file generated”. Clicar em OK.
Para gerar o arquivo executável para o CLP clicar novamente na opção Generate e depois
selecionar Generate all.
Aparece a caixa de diálogo Compiller outputs, mostrando como Make File o nome
EXERC01.MAK. É mostrada a lista de arquivos. Se não ocorrer nenhum erro na compilação
aparecerá a mensagem “No errors during code generation”. Clicar em Close.
Caso ocorra algum erro nesta etapa, clicar em cima do erro apresentado e a tela do POU Editor
será aberta para edição.
Para sair da pasta Code Generation, clicar em File e selecionar Exit.
E - Transferência do Programa Compilado para o CLP
Antes de se fazer a transferência do programa é necessário estabelecer a ligação física entre a
CPU do micro-computador e a CPU do CLP. O cabo de sinal deve ser conectado à porta
serial COM1 (ou COM2) do micro-computador ao terminal PRG do CLP.
Após feita a ligação física, entrar na pasta Test and Commissioning. Se for a primeira vez
que for feita a transmissão de dados, deve-se fazer a ligação lógica entre o micro e o CLP.
Abre-se a caixa de diálogo Read in Communications Configuration, com uma mensagem de
que não existe ainda o arquivo de configurações de comunicação e que um novo arquivo deverá
ser criado. Clicar em OK.
Deve então aparecer a tela Test and Commissioning com as seguintes informações:
Device Name
Device Type
Status
Interface
EXERC01
PS4200
Disconnected
COM1
Line
Na função Interface selecionar a porta utilizada, COM1 ou COM2.
A seguir, para conectar logicamente o micro com o CLP, clicar em Connect, e o Status deve
mudar para Connected.
7
Device Name
Device Type
Status
Interface
EXERC01
PS4200
Connected
COM1
Line
Depois de conectado, transferir o programa cliclando em Transfer.
Aparece a caixa de diálogo Transfer/File Manager, mostrando o nome do arquivo a ser
transferido. Clicar sobre o nome para selecioná-lo e em seguida em Execute.
O CLP, ao ser ativado, assume o status RUN, passando a executar o último trabalho gravado
em sua memória. Para se processar a transferência de um novo programa, deve-se interromper a
execução do programa anterior. Aparece então a caixa de diálogo PLC Communication
solicitando a interrupção da execução do programa. Clicar em Yes.
Após a transferência do programa, a caixa de diálogo PLC Communication
perguntando se o programa deve ser iniciado. Clicar em Yes.
retorna
Na caixa de diálogo Transfer/File Manager clicar em Close. A partir deste momento pode
ser desfeita a ligação entre o micro e o CLP. O CLP permanecerá no status RUN.
Pode-se, entretanto, monitorar a execução do programa no monitor, na tela do POU Editor.
Para tanto, na tela Test and Commissioning clicar no ícone do POU Editor (em verde).
Aparece o quadro Program EXERC01.PCD. Clicar no nome do programa que é mostrado na
tela e em seguida em Display/Change POU.
Abre-se então a tela do POU Editor com o programa na linguagem IL (Instruction List).
Clicar em Options para selecionar LD (Ladder) ou FBD (diagrama de portas lógicas).
Para monitorar o estado das entradas e das saídas em tempo real, selecionar na parte inferior da
tela a função Status Display. Abaixo dos elementos da Ladder constará a indicação 0 para
aberto ou desligado e 1 para fechado ou ligado.
Antes de se fazer a ligação dos dispositivos ao CLP é conveniente fazer a simulação de
funcionamento do programa por meio das chaves de simulação acopladas à entrada do CLP.
Essas chaves, uma para cada entrada do CLP, são ligadas à fonte 24V e na simulação fazem o
papel dos dispositivos a serem ligados às entradas. Estas chaves são do tipo com retenção e,
quando fechadas, acendem os leds correspondentes às entradas. O resultado da execução do
programa pelo CLP é observado na saída, com o acendimento dos leds correspondentes às
saídas.
8
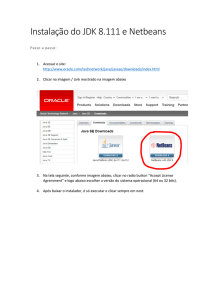
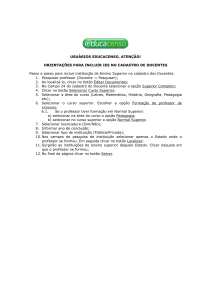
Diagrama de Ligação do Motor
R
S
T
24V
MOTOR
(Q0.0)
RELE
1
2
3
MOTOR TRIFÁSICO
4
5
6
LIGAÇÃO ESTRELA
9
Diagrama de Portas Lógicas
OU
LIGD
E
DESL
E
MOTOR
RELE
Diagrama Ladder
LIGA
MOTOR
DESL
RELE
MOTOR
10
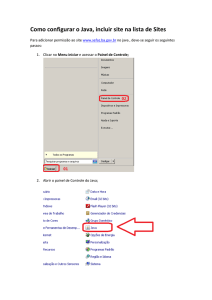
Ligação das Entradas e Saídas do CLP
LIGA
DESL
0
RELE
1
2
3
4
5
6
7
P
N
Digital Input
PRG
S.net
Digital Output
0
1
2
3
4
5
U0
MOTOR
ENTRADAS
LIGA
DESL
RELE
%I0.0.0.0.0
%I0.0.0.0.1
%I0.0.0.0.2
Botão liga (NA)
Botão desliga (NF)
Relé térmico (NF)
%Q0.0.0.0.0
Motor elétrico (Contator)
SAÍDAS
MOTOR
U1
U10 0V
11
INVERSÃO DE ROTAÇÃO DE MOTOR TRIFÁSICO
Para se inverter a rotação de um motor trifásico basta inverter a ligação de duas fases quaisquer,
mantendo a terceira inalterada.
R
S
T
T
S
R
1
2
3
1
2
3
4
5
6
4
5
6
LIGAÇÃO ESTRELA
LIGAÇÃO ESTRELA
MOTOR SENTIDO DIRETO
MOTOR SENTIDO INVERSO
A inversão de rotação pode ser feita por meio de contatores, um para ligação do motor no sentido
direto e outro para ligação no sentido inverso.
Para comandar os contatores temos um botão Liga (NA) para o sentido direto, outro botão Liga
(NA) para o sentido inverso e um botão Desliga (NF) para desligar o motor. Tem-se também
um relé térmico de proteção do motor.
Para se inverter a rotação com o motor em funcionamento deve-se primeiro desligar o motor e,
só então, fazer a inversão de rotação.
O programa em Ladder deve prever a impossibilidade de se fazer a inversão de rotação sem o
acionamento do botão Desliga (intertravamento entre os contatores).
12
Elaboração do Programa
Na pasta Project Manager; clicar na opção Project e abrir um novo projeto. Na caixa de
diálogo aceitar o caminho C:\S4 e em seguida digitar o nome escolhido para o projeto.
Clicar em OK e novamente na opção Project selecionar Exit.
Na pasta POU Editor, na opção File, abrir um novo arquivo.
Na tela de programação clicar em Options e selecionar a linguagem Ladder (LD).
A primeira linha do programa aciona o motor no sentido direto (acionamento do contator DIR).
0001
LDIR
DESL
RELE
INV
DIR
DIR
O elemento INV negado impossibilita o acionamento do contator DIR se o contator INV
estiver acionado (intertravamento entre DIR e INV).
A segunda linha aciona o motor no sentido inverso (acionamento do contator INV).
0002
LINV
DESL
RELE
DIR
INV
INV
O elemento DIR negado impossibilita o acionamento do contator INV se o contator DIR
estiver acionado (intertravamento entre DIR e INV).
13
Em sequência deve ser feita a declaração das variáveis na janela à esquerda da tela (Syntax
Controlled Variable Editor). Temos as seguintes variáveis:
LDIR
LINV
DESL
RELE
DIR
INV
BOOL
BOOL
BOOL
BOOL
BOOL
BOOL
%I0.0.0.0.0
%I0.0.0.0.1
%I0.0.0.0.2
%I0.0.0.0.3
%Q0.0.0.0.0
%Q0.0.0.0.1
Após a declaração das variáveis, salvar o programa clicando em File e selecionando Save as.
Após dar nome ao programa clicar OK.
Checar a existência de erros de sintaxe clicando em File e selecionando Syntax Check.
Sair da programação clicando em File e selecionando Close.
Sair do POU Editor clicando em File e selecionando Exit.
Em seguida passar pelas pastas:
Topology Configurator.
Code Generation.
Test and Commissioning.
14
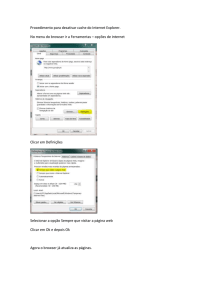
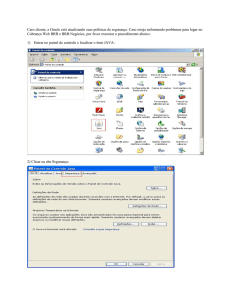
Diagrama de Ligação da Inversão do Motor
R
S
T
24V
24V
INV
(Q0.1)
DIR
(Q0.0)
RELE
1
2
3
MOTOR TRIFÁSICO
4
5
6
LIGAÇÃO ESTRELA
15
Diagrama de Portas Lógicas
OU
LDIR
E
DESL
E
E
DIR
E
E
INV
RELE
DESL
RELE
E
LINV
OU
16
Diagrama Ladder
LDIR
DESL
RELE
INV
DIR
DESL
RELE
DIR
INV
DIR
LINV
INV
ENTRADAS
LDIR
LINV
DESL
RELE
%I0.0.0.0.0
%I0.0.0.0.1
%I0.0.0.0.2
%I0.0.0.0.3
Botão liga direto (NA)
Botão liga inverso (NA)
Botão desliga (NF)
Relé térmico (NF)
%Q0.0.0.0.0
%Q0.0.0.0.1
Motor sentido direto
Motor sentido inverso
SAÍDAS
DIR
INV
17
Ligação dos Dispositivos ao CLP
LDIR
LINV
DESL
0
1
RELE
2
3
4
5
6
7
P
N
Digital Input
Digital Output
0
DIR
1
2
INV
3
4
5
U0
U1
U10
0V
18
TEMPORIZADORES
CLP PS4-201-MM1 possui temporizadores apresentados como Blocos de Função Definidos
pelo Fabricante (Manufacturer Defined Function Blocks).
IN
PT
XXX
Q
ET
IN - entrada (variável que habilita o temporizador)
Q - saída (variável comandada pelo temporizador)
PT - tempo de atuação
ET - indicador da passagem do tempo
XXX - tipo do temporizador
Os principais tipos de temporizadores são:
TP – Temporizador por Pulso: quando ativado (IN = 1) inicia a contagem do tempo e tem sua
saída alterada para 1 (Q = 1). Ao atingir o tempo de atuação definido em PT, a saída
volta a assumir o valor 0, independentemente do valor da entrada IN.
1
pulso
Entrada IN
0
1
Saída Q
0
tempo
tempo
19
TON – Temporizador com Atraso na Energização: quando ativado (IN = 1) inicia a contagem
do tempo e até atingir o valor especificado em PT. Neste instante tem sua saída alterada
para 1 (Q = 1). Quando a entrada voltar ao valor 0, a saída também assume o valor 0.
Se a entrada voltar ao valor 0 antes de decorrido o tempo em PT, a saída permanece no
valor 0.
1
Entrada IN
0
1
Saída Q
0
tempo
tempo
TOF – Temporizador com Atraso na Desenergização: quando ativado (IN = 1) tem sua saída
alterada para 1 (Q = 1). Quando a entrada voltar ao valor 0, inicia a contagem do
tempo mantendo a saída no valor 1. Quando o tempo decorrido atingir o valor
especificado em PT a saída volta ao valor 0.
1
pulso
Entrada IN
0
1
Saída Q
0
tempo
tempo
20
LIGAÇÃO ESTRELA-TRIÂNGULO
O motor trifásico normalmente funciona ligado em triângulo (ou delta), em que a tensão fasefase da rede (220V) é aplicada a seus enrolamentos. Quando ligado em estrela (ou ipsilon), seus
enrolamentos são submetidos à tensão fase-neutro (127V). Nesta ligação a potência
desenvolvida pelo motor é igual a 1/3 daquela desenvolvida em triângulo. Da mesma forma a
corrente é igual a 1/3 da corrente em triângulo.
Ao se dar partida no motor, o rotor encontra-se parado e, portanto, não gera força contraeletromotriz (fcem) que se opõe à tensão aplicada aos enrolamentos do motor. Neste instante
apenas a impedância dos enrolamentos limita a corrente elétrica. Durante a partida a corrente
atinge valores de 6 a 8 vezes maior que a nominal. À medida que o motor adquire velocidade,
vai sendo gerada uma fcem crescente que vai limitando o valor da corrente, até ser igual à
corrente nominal.
Uma das formas de se reduzir a corrente na partida e a utilização da ligação estrela-triângulo. O
motor parte em estrela e após um tempo suficiente para alcançar uma velocidade próxima à de
regime, passa para triângulo.
Descrição da Partida Estrela-Triângulo:
Vamos utilizar uma chave estrela-triângulo automática, onde são utilizados os seguintes
elementos:
Contator de linha CLIN
trifásica ( R, S e T).
-
liga a entrada do motor (terminais 1, 2 e 3) à rede
Contator estrela CY - liga a saída do motor ( terminais 4, 5 e 6) em um único ponto.
Contator triângulo CD - liga os terminais de saída do motor aos terminais de entrada:
1 com 5, 2 com 6 e 3 com 4 (ou também 1 com 6, 2 com 4 e 3 com 5).
Temporizador TempY - controla o tempo de atuação da ligação estrela.
Temporizador TempD - controla o tempo de atuação da ligação triângulo.
Temos também os botões Liga (LIG), Desliga (DESL) e o relé térmico (RELE).
Funcionamento:
Ao se apertar o botão LIG o motor parte em estrela, sendo fechados os contatores CLIN e
CY.
Decorridos 3 segundos, contados pelo temporizador TempY, é desligado o contator CY,
permanecendo CLIN ligado.
Após 0,5 segundos (3,5 segundos da partida), contados pelo temporizador TempD, é ligado o
contator CD. O motor passa a ser ligado em triângulo.
Para se desligar o motor deve ser acionado o botão DESL ou ocorrer a atuação do RELE.
21
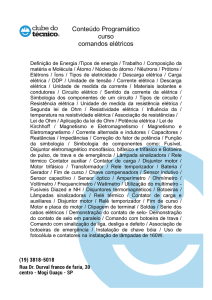
LIGAÇÃO ESTRELA
R
S
2
1
R
T
1
3
4
5
6
S
2
3
4
5
6
T
LIGAÇÃO TRIÂNGULO
R
S
T
R
1
4
2
5
3
5
1
6
2
4
S
6
T
3
22
Elaboração do Programa
Na pasta Project Manager; clicar na opção Project e abrir um novo projeto. Na caixa de
diálogo aceitar o caminho C:\S4 e em seguida digitar o nome escolhido para o projeto.
Clicar em OK e novamente na opção Project selecionar Exit.
Na pasta POU Editor, na opção File, abrir um novo arquivo.
Na tela de programação clicar em Options e selecionar a linguagem Ladder (LD).
Na primeira linha do programa é feita a ligação do contator de linha CLIN.
0001
LIGA
DESL
RELE
CLIN
CLIN
Para passar para a linha seguinte, clicar em
abaixo da linha 0001.
Na segunda linha é inserido o temporizador TempY. Este temporizador vai manter o contator
CY ligado por 3 segundos.
Para inserir o temporizador clicar na opção Symbols e selecionar Manufacturer Defined
Function Blocks. O programa abre o quadro Function Blocks e nele deve-se selecionar TP.
No quadro de diálogo digitar no campo Instance Name o nome do temporizador (TempY).
Clicar em Accept
Surge na tela o bloco de função:
0002
TempY
TP
IN
Q
PT
ET
23
Dar 2 cliques na posição IN. Abre-se a caixa de diálogo Name Element solicitando o nome
da entrada que habilita o temporizador. Digitar CLIN e dar OK..
Continuando, dar 2 cliques na posição Q e na caixa de diálogo digitar o nome da saída CY e
clicar OK.
Idem para a posição PT (tempo de atuação) e digitar T#3s. Clicar OK.
O temporizador TempY vai ter a seguinte configuração:
0002
TempY
CLIN
T#3s
TP
IN
Q
PT
ET
CY
Outra maneira de comandar a saída CY é a seguinte:
Deixar a posição Q em branco.
Criar uma linha abaixo de TempY com a seguinte configuração:
0003
TempY.Q
CY
TempY.Q é a saída do temporizador TempY. Genericamente as saídas são especificadas
como “nome do temporizador.Q”.
Na próxima linha será inserido o temporizador TempD, que 3,5 segundos após a partida do
motor vai ligar o contator CD.
Clicar na opção Symbols e selecionar Manufacturer Defined Function Blocks. Selecionar
o temporizador TON. Digitar o nome TempD e clicar Accept.
Vai aparecer no Ladder:
24
0003
TempD
TON
IN
Q
PT
ET
Digitar os nomes:
IN Æ CLIN
Q
Æ CD
TP Æ T#3.5s
0003
TempD
CLIN
T#3.5s
TON
IN
Q
PT
CD
ET
Em sequência deve ser feita a declaração das variáveis na janela à esquerda da tela (Syntax
Controlled Variable Editor). Temos as seguintes variáveis booleanas:
LIGA
DESL
RELE
CLIN
CY
CD
BOOL
BOOL
BOOL
BOOL
BOOL
BOOL
%I0.0.0.0.0
%I0.0.0.0.1
%I0.0.0.0.2
%Q0.0.0.0.0
%Q0.0.0.0.1
%Q0.0.0.0.2
Resta agora definir os temporizadores TempY e TempD.
TempY:
Name:
Digitar TempY
25
Type:
No menu superior clicar na opção Data Types e selecionar Manufacturer Defined Function
Blocks. Aparecerá um quadro com todos os blocos de função criados pelo fabricante do CLP e
dentre eles selecione o temporizador TP. Clicar em Accept.
Os demais campos, Initial, Attribute e Address não devem ser preenchidos.
Clicar em Add para adicionar à lista de variáveis.
TempD:
Name:
Digitar TempD
Type:
No menu superior clicar na opção Data Types e selecionar Manufacturer Defined Function
Blocks. Aparecerá um quadro com todos os blocos de função criados pelo fabricante do CLP e
dentre eles selecione o temporizador TON. Clicar em Accept.
Os demais campos, Initial, Attribute e Address não devem ser preenchidos.
Clicar em Add para adicionar à lista de variáveis.
A lista completa das variáveis terá o seguinte aspecto:
LIGA
DESL
RELE
CLIN
CY
CD
TempY
TempD
BOOL
BOOL
BOOL
BOOL
BOOL
BOOL
TP
TON
%I0.0.0.0.0
%I0.0.0.0.1
%I0.0.0.0.2
%Q0.0.0.0.0
%Q0.0.0.0.1
%Q0.0.0.0.2
Após a declaração das variáveis, salvar o programa clicando em File e selecionando Save as.
Após dar nome ao programa clicar OK.
Checar a existência de erros de sintaxe clicando em File e selecionando Syntax Check.
Sair da programação clicando em File e selecionando Close.
Sair do POU Editor clicando em File e selecionando Exit.
Em seguida passar pelas pastas:
Topology Configurator.
Code Generation.
Test and Commissioning.
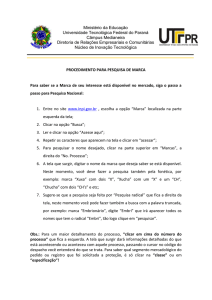
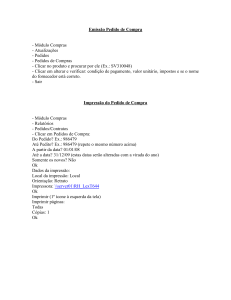
Diagrama de Ligação Estrela-Triângulo
R
S
T
24V
24V
CY
(Q0.1)
CLIN
(Q0.0)
24V
CD
(Q0.2)
6
5
4
RELE
1
2
3
4
5
6
MOTOR TRIFÁSICO
26
27
Ladder Completa
0001
LIGA
DESL
RELE
CLIN
0002
TempY
CLIN
T#3s
TP
IN
Q
PT
ET
CY
0003
TempD
CLIN
T#3.5s
TON
IN
Q
PT
CD
ET
ENTRADAS
LIGA
DESL
RELE
%I0.0.0.0.0
%I0.0.0.0.1
%I0.0.0.0.2
Botão liga (NA)
Botão desliga (NF)
Relé térmico (NF)
%Q0.0.0.0.0
%Q0.0.0.0.1
%Q0.0.0.0.2
Contator da linha
Contator estrela
Contator triângulo
SAÍDAS
CLIN
CY
CD
CLIN
28
Ligação dos Dispositivos ao CLP
LIGA
DESL
0
RELE
1
2
3
4
5
6
7
P
N
Digital Input
Digital Output
0
CLIN
1
2
CY
3
4
5
CD
U0
U1
U10 0V