SENAI – CFPOC/POUSO ALEGRE
4. Sensores Ativos
Como já foi dito anteriormente, os sensores ativos comportam-se como
geradores. Estes produzem um sinal elétrico a partir do fenômeno físico sem
requererem fontes externas de alimentação. Contudo, nem sempre a energia que
produzem é suficiente para, por si só, excitar o elemento da cadeia de medida que
se segue. Assim, frequentemente, os sensores ativos necessitam, tal como os
passivos, de fontes de energia auxiliares.
Uma particularidade deste tipo de sensor é a possibilidade de possuírem dois
regimes de funcionamento; por exemplo, o efeito que rege o seu funcionamento é
normalmente reversível. Assim, alguns dos tipos de dispositivos que serão
abordados nesta secção poderão ser usados tanto na vertente de sensoriamento
como de atuação.
Nesta secção serão objeto de estudo alguns dos tipos mais comuns de
sensores ativos tanto na perspectiva da sua aplicação como do seu princípio físico.
4.1. Sensores Eletromagnéticos
Para sensores baseados neste princípio, a variação de uma determinada
variável física reflete-se numa variação do campo magnético sem que seja
implicada, de uma forma direta, qualquer variação da indutância do sensor [1].
A maior parte dos sensores eletromagnéticos existentes baseia-se sobre a lei
de Faraday; por exemplo, quando se verifica um movimento relativo entre um
condutor e um campo magnético surge uma f.e.m. no condutor. Para o caso de um
indutor de n espiras, a f.e.m. induzida é dada por:
Onde se refere ao fluxo magnético que atravessa a bobina. Este fluxo pode ser
intrinsecamente variável como aquele que é produzido; por exemplo, devido a uma
corrente variável no tempo. De forma alternativa, a posição do circuito pode ser
variável em relação a um fluxo magnético constante.
4.1.1. Resolvers e Synchros
Um resolver é um tipo de transformador elétrico giratório usado para medir
graus de rotação. Relativamente à sua arquitetura, um resolver é semelhante a um
motor elétrico possuindo, tal como ele, um estator (parte fixa) e um rotor que pode
girar livremente no interior do primeiro. Estes dispositivos são sensores de posição
angular eletro-mecânicos que, através de princípios eletromagnéticos, fornecem um
sinal elétrico que é função da sua posição rotórica (o contrário também é válido).
Mais concretamente convertem a posição de um eixo numa diferença de fase de
uma tensão alternada em relação a outra tomada como referência.
1
Prof.: Anderson Dias de Oliveira
CLP
SENAI – CFPOC/POUSO ALEGRE
4.1.2. Sensores Eletromagnéticos de Fluxo (vazão)
Para o caso de um condutor retilíneo de comprimento l deslocando-se a uma
velocidade v transversal ente a um campo magnético B, a tensão induzida nesse
condutor é dada, em módulo, por [1]:
esta expressão mantém-se independentemente do tipo de material que
compõe o condutor servindo de base a um grande número de sensores
eletromagnéticos como, por exemplo, microfones, acelerômetros e sensores de
velocidade linear [1].
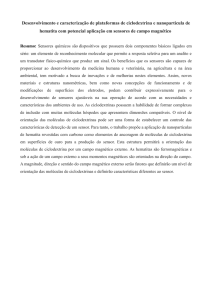
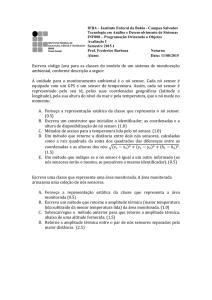
É também neste princípio que se baseia o medidor de vazão eletromagnético
usado para quantificar a velocidade média (vazão) de um fluído condutor. O seu
princípio de funcionamento resulta da aplicação directa de (5.9) em que o
comprimento l é substituído pelo diâmetro d do condutor por onde circula o fluído. A
sua filosofia de funcionamento é ilustrada na figura seguinte.
2
Prof.: Anderson Dias de Oliveira
CLP
SENAI – CFPOC/POUSO ALEGRE
Um fluido desloca-se ao longo de um tubo não metálico e não magnético (de
forma a não haver distorções do campo magnético) com uma velocidade v no interior
de um campo magnético B criado por duas bobinas externas. Do movimento do
líquido perpendicularmente ao campo magnético gerado resulta uma força
eletromotriz induzida detectada por dois eletrodos colocados transversalmente em
relação ao campo magnético e à direção do movimento do líquido.
Para este tipo de sensor, o campo magnético deve ser constante podendo ser
gerado tanto por uma corrente contínua como alternada. Normalmente uma corrente
alternada é utilizada de forma a minimizar problemas eletroquímicos nos eletrodos e
interferências termoelétricas [1]. A figura a seguir mostra um possível aspecto de um
sensor comercial desta natureza.
Existem diversos tipos de sensores de fluxo para líquidos apoiados nos mais
variados princípios físicos. No entanto, este método em particular permite medir, de
uma forma não invasiva, o fluxo de um líquido não necessitando portanto de
qualquer contato direto com a quantidade a medir. Assim sendo, este tipo de
dispositivos pode ser aplicado (sempre que as condições de funcionamento se
reunam) para medir, por exemplo, líquidos corrosivos ou com matéria sólida em
suspensão.
4.1.4. Sensores de Efeito Hall
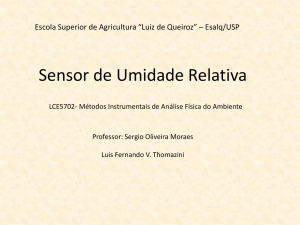
Estes dispositivos sensores têm por base, não a lei da indução de Faraday,
mas um outro efeito eletromagnético descoberto em 1879 pelo cientista E. H. Hall.
Hall verificou que submetendo um condutor simultaneamente a uma corrente elétrica
e a um campo magnético perpendicular à direção do fluxo dessa corrente,
desenvolvia-se uma tensão no condutor perpendicular a ambas as grandezas. Este
fenômeno ocorre devido ao desvio da trajetória das cargas elétricas provocada pela
força de Laplace. Assim criam-se distribuições assimétricas de cargas nas
superfícies laterais do condutor dando origem a uma diferença de potencial. Esta
ocorrência é ilustrada pela figura que se segue.
3
Prof.: Anderson Dias de Oliveira
CLP
SENAI – CFPOC/POUSO ALEGRE
Apesar do efeito Hall se verificar em qualquer material condutor, este fenômeno
é bastante mais intenso nos semicondutores. Além da sua maior sensibilidade ao
efeito, a utilização de materiais semicondutores introduz a vantagem suplementar de
ser possível a integração, numa mesma pastilha de silício, do sensor e respectivo
circuito de condicionamento de sinal. Desta forma, os sensores de efeito Hall
aparecem normalmente sob a forma de circuito integrado com encapsulamento de
três terminais como mostrado na figura 5.8.
4.2. Sensores Termoelétricos
Os sensores termoelétricos têm por princípio de funcionamento dois
fenômenos térmicos que se verificam sobre condutores. São eles o efeito Thomson
e o efeito Seebeck.
O efeito Thomson refere-se à força electromotriz que se observa num condutor
sujeito a um gradiente de temperatura; por exemplo, uma temperatura não
homogênea ao longo de um condutor origina uma f.e.m. Já o efeito Seebeck diz
respeito ao fenômeno elétrico (f.e.m) que se verifica quando se mantém as duas
junções de um circuito fechado, formado por dois condutores de diferentes metais, a
temperaturas distintas. Este último efeito é reversível e possui algumas aplicações
no domínio da atuação (efeito Peltier).
Uma das aplicações mais comuns deste último fenômeno térmico é em
sensores de temperatura designados por termopares. Conceitualmente estes
dispositivos são constituídos
4
Prof.: Anderson Dias de Oliveira
CLP
SENAI – CFPOC/POUSO ALEGRE
apenas por dois metais (ou ligas metálicas) distintos ligados por uma união de
soldadura (figura 5.10).
Segundo Seebeck, se dois metais (ou ligas metálicas) diferentes A e B são
unidos, uma diferença de potencial ocorre através da junção de A com B cuja
amplitude depende quer do tipo de metais utilizados quer da magnitude da diferença
entre a temperatura da junção (T1) e a temperatura da junção de referência (T2).
Assim, quando a junção de medida é aquecida ou arrefecida relativamente a
uma segunda junção de referência, a f.e.m. produzida pode ser caracterizada pela
seguinte equação :
Onde α1 e α2 são constantes e dependem dos materiais usados para a
construção do termopar. Verifica-se assim uma relação não-linear entre a f.e.m
produzida e a temperatura das junções. Por este motivo, a medição da temperatura
através destes dispositivos é efetuada com base em curvas ou tabelas de calibração
fornecidas pelos fabricantes. Para um determinado par específico de junções, estas
tabelas são determinadas com precisão para um conjunto vasto de temperaturas em
relação a uma temperatura de referência de 0ºC. A tabela a seguir apresenta alguns
dos pares de junções mais comuns para a concepção de termopares.
Adicionalmente apresentam-se também as respectivas referências comerciais
e algumas características metrológicas [3].
Os termopares são estruturas frágeis devendo portanto ser protegidos por um
invólucro que os proteja de deformações mecânicas e químicas. Assim, e em termos
de concepção, o termopar é primeiro colocado no interior de um isolador elétrico
(normalmente um material cerâmico) de forma a evitar qualquer contato elétrico com
o processo a medir. Posteriormente o conjunto é envolto num encapsulamento que
lhe fornece robustez mecânica e boa condução térmica (em regra utiliza-se o aço
inoxidável) [1] [2]. A figura 5.11 mostra o aspecto exterior de um termopar usado em
processos industriais.
5
Prof.: Anderson Dias de Oliveira
CLP
SENAI – CFPOC/POUSO ALEGRE
Nota: Constantan, Cromel, Alumel, Nirosil e Nisil são nomes comerciais de ligas
metálicas.
4.3. Sensores Piezoelétricos
Os sensores piezoelétricos, como o seu próprio nome indica, têm por princípio
físico de funcionamento um efeito que se verifica em determinados materiais a que
se dá o nome de efeito piezoelétrico. O efeito piezoelétrico consiste no aparecimento
de uma polarização eléctrica (d.d.p.) entre faces opostas de um dado material
quando este é submetido a uma tensão mecânica entre essas mesmas faces (figura
5.16 a). Adicionalmente, e tal como para o efeito termoelétrico, o fenômeno
piezoelétrico também é reversível; por exemplo, se for aplicada uma tensão entre
faces opostas do material este deforma-se (figura 5.16 b). Assim, o princípio de
piezoeletricidade pode ser aplicado tanto em sensores como em atuadores.
6
Prof.: Anderson Dias de Oliveira
CLP
SENAI – CFPOC/POUSO ALEGRE
A nível microscópico, a piezoeletricidade de um material está relacionada com
a sua distribuição iônica, mais propriamente com o fato de, na sua composição,
possuírem moléculas com distribuição assimétrica da carga elétrica. Assim, o efeito
piezoelétrico é predominante em materiais de estrutura cristalina tais como o
quartzo, o sal de Rochelle, alguns tipos de cerâmicas e polímeros. Adicionalmente, e
devido à natureza anisotrópica destes materiais, o efeito piezoelétrico depende
também da orientação relativa em que as deformações são efectuadas.
Num nível prático, este fenômeno possui um variado leque de aplicações tanto
no domínio do sensoriamento como da atuação. No que se refere ao primeiro
domínio, o efeito piezoelétrico é usado como base para diversos tipos de sensores
entre os quais se destacam, sensores de força, pressão, aceleração, umidade, e
ultra-sons (tanto para o receptor como para o emissor).
4.4. Sensores Piroelétricos
Tal como o efeito piezoelétrico, o efeito piroelétrico é verificado em materiais
cristalinos que geram cargas quando sujeitas a uma determinada grandeza física.
No entanto, e ao contrário do fenómeno piezoelétrico, não é uma deformação
mecânica que causa o aparecimento de uma carga elétrica superficial, mas sim a
variação da temperatura; por exemplo, radiação eletromagnética de baixo
comprimento de onda.
Estruturalmente, um sensor piroelétrico é similar ao sensor piezoelétrico
discutido anteriormente. De fato, e como se ilustra na figura 5.22, um sensor
piroelétrico consiste num cristal piroelétrico polarizado sobre o qual são depositados
dois eletrodos metálicos em faces opostas. Esta estratégia de concepção constitui
uma espécie de capacitor que opera como sensor de temperatura.
7
Prof.: Anderson Dias de Oliveira
CLP
SENAI – CFPOC/POUSO ALEGRE
A aplicação mais comum para o efeito piroelétrico é a detecção de radiação
térmica à temperatura ambiente. Este tipo de dispositivos tem sido aplicado em
pirômetros (medição da temperatura sem contato), sistemas de alarme, etc. [1]. Num
nível doméstico, este tipo de sensor tem sido cada vez mais utilizado sob a forma de
um interruptor piroelétrico. Um possível aspecto é ilustrado na figura a seguir.
Estes interruptores aparecem no mercado com três terminais de ligação e com
ajuste externo de sensibilidade. À frente do detector é aplicado um elemento de
focagem cujo objetivo principal é o de direcionar a radiação infravermelha para o
sensor servindo também como proteção.
4.5. Sensores Fotovoltáicos
Num material semicondutor do tipo p os portadores majoritários são as lacunas
no sentido em que existem mais lacunas disponíveis para a condução do que
elétrons. Já para o material semicondutor do tipo n verifica-se o contrário; por
exemplo, existem mais elétrons livres do que lacunas para a condução. No momento
em que estes dois tipos de semicondutores são unidos, e devido à agitação térmica,
dá-se na região de junção um fenômeno de recombinação dos elétrons em excesso
do material n com as lacunas em excesso do material p.
8
Prof.: Anderson Dias de Oliveira
CLP
SENAI – CFPOC/POUSO ALEGRE
Como resultado verifica-se, em ambos os lados da superfície de contato, uma
redução da concentração dos portadores de carga livres. Mais ainda verifica-se que,
em torno da junção, existe uma região no material do tipo p em que predominam
elétrons e uma região no material do tipo n em que predominam lacunas. Os íons
positivos na região n e os íons negativos na região p produzem um campo elétrico
que se opõe à difusão de cargas adicionais através dessa barreira de potencial.
Desta forma obtém-se um equilíbrio entre a corrente de difusão e a corrente induzida
por esse campo elétrico não se verificando, em regime estático, a passagem de
portadores de carga de um material para outro.
O efeito fotovoltáico consiste no aparecimento de um potencial elétrico numa
junção p-n quando radiação eletromagnética de comprimento de onda adequada
(designadamente na região referente à luz visível) ioniza a região de depleção.
A incidência de radiação eletromagnética na junção com energia superior à da
barreira de potencial cria pares adicionais de elétrons/lacunas traduzindo-se, em
última análise, numa diferença de potencial que pode ser avaliada aos terminais do
dispositivo. Essa tensão em circuito aberto, ou alternativamente a corrente de curto
circuito, aumenta com o aumento da intensidade da radiação até um ponto de
saturação determinado pela energia da junção.
Assim, os sensores fotovoltáicos são usados em aplicações onde se pretende
medir a intensidade luminosa ou, em alternativa, em aplicações onde a luz é usada
para medir uma variável diferente (ex. detecção de passagem). Apesar do elevado
número de dispositivos com esta base de funcionamento, nesta secção vamos
estudar dois: o fotodiodo e o fototransistor.
4.5.1. Fotodiodos
Embora qualquer diodo seja sensível à radiação eletromagnética, os fotodiodos
são dispositivos especialmente desenhados de forma a aproveitar ao máximo este
feito. Assim, em relação aos diodos normais, os fotodiodos possuem uma área de
9
Prof.: Anderson Dias de Oliveira
CLP
SENAI – CFPOC/POUSO ALEGRE
exposição da zona de junção mais elevada e um encapsulamento especialmente
concebido para ser permissivo à luz.
Por este motivo o invólucro é normalmente transparente ou, em alternativa,
possui uma janela ou lente de plástico transparente adaptada.
A resposta espectral dos fotodiodos depende do tipo de material e do
encapsulamento. No que se refere ao material utilizado, a maior parte destes
sensores são fabricados a partir de silício possuindo uma resposta espectral máxima
para comprimentos de onda em torno dos 800nm. Contudo, quando se pretende
melhor resposta a comprimentos de onda mais baixos, por exemplo, na zona do
infravermelho, o material usado é normalmente o germânio[4].
Na figura 5.27 é mostrado o esquema equivalente simplificado para um
fotodiodo.
Alguns exemplos de montagens de fotodiodos no modo fotovoltáico são
ilustrados na figura abaixo.
4.5.2. Fototransistores
Em termos de concepção, um fototransistor consiste, tal como o transistor
bipolar, num conjunto organizado de três camadas semicondutoras (normalmente do
tipo n-p-n) em que o fenômeno de condução é dependente da radiação
eletromagnética que incide na junção base/colector (figura 5.31 a). Desta forma, os
pares elétron/lacuna gerados pelo efeito fotovoltáico constituem uma pequena
corrente injetada na base que, em última análise, é responsável por colocar o
transístor na região ativa. Adicionalmente, e tendo em consideração a matéria
previamente exposta, o fototransistor pode ser visto como sendo um fotodiodo em
paralelo com a junção base coletor de um transistor bipolar normal como se ilustra
na figura 5.31 b. A corrente reversa do fotodiodo transforma-se na corrente de base
10
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
do transistor sendo amplificada por uma quantidade que depende do ganho em
corrente (hFE) do transístor, por exemplo
Em termos de encapsulamento, estes dispositivos possuem dois ou três
terminais (é possível encontrar fototransistores com a base acessível) estando a
junção base/colector exposta à luz através de uma pequena janela transparente
implantada no invólucro. Na figura seguinte são mostrados possíveis
encapsulamentos de fototransistores comerciais.
4.6. Sensores Digitais
Na realidade esta secção deveria ser chamada “métodos digitais de
sensoriamento” pois na realidade não existem sensores para os quais o processo de
sensoriamento resulte diretamente numa saída digital. O processo usual é o de
converter uma dada quantidade contínua no tempo num sinal digital por intermédio
de um sensor sem a exigência explicita da conversão de uma tensão analógica na
sua equivalente digital [1]. Dentro deste contexto, no decorrer desta secção, serão
objeto de estudo algumas técnicas de medida baseadas na medida da frequência de
um sinal modulado pelo processo a medir recorrendo (ou não) a um elemento
primário qualquer.
11
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
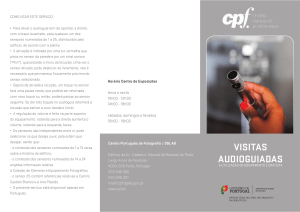
4.6.1. Tacômetro de Relutância Variável
O tacômetro de relutância variável é um dispositivo que pode ser utilizado para
a medição da velocidade angular ou posição de um veio. Conceitualmente, consiste
numa roda dentada feita de um material ferromagnético solidária com o eixo cuja
velocidade angular ou posição se pretende medir. O sensor propriamente dito
consiste num enrolamento condutor disposto em torno de um ímã permanente. Esta
estratégia de sensoriamento é esboçada na figura abaixo.
Devido à rotação da roda dentada, o intervalo de ar entre o sensor e o material
ferromagnético é alterado traduzindo-se numa modificação da relutância do
circuito magnético. Desta forma, o fluxo magnético na bobina varia resultando, em
última análise, numa variação da força eletromotriz induzida no enrolamento.
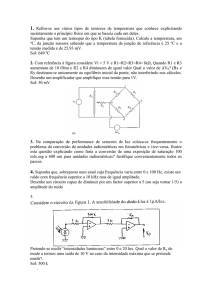
4.6.2. Codificador Incremental de Posição
Trata-se de um dispositivo mecânico muito simples que permite converter, de
forma imediata, a posição de um eixo numa informação binária (posições lineares
também podem ser medidas recorrendo a esta estratégia). Em termos de
concepção, e para o caso de codificadores ópticos para posições angulares, este
tipo de dispositivo consiste num disco com uma escala composta por segmentos
alternadamente transparentes e opacos.
Adicionalmente, possui em posições diametralmente opostas em relação a
cada uma das faces do disco um ou mais emissores de luz e um conjunto de
dispositivos sensíveis a essa mesma grandeza. Estes pares emissor/receptor são
responsáveis pela „leitura‟ da posição angular do disco.
Assim, considere-se o codificador incremental ilustrado na figura 6.2 a. Este
dispositivo gira solidário com a peça cuja posição se pretende conhecer. Para este
caso concreto, o codificador é composto por um disco com doze aberturas
igualmente espaçadas e por um par emissor e receptor de luz mecanicamente
isolados do disco; por exemplo, a sua posição é fixa em relação ao disco. O conjunto
emissor/receptor é colocado em faces opostas do disco numa posição, em relação
ao centro do disco, igual à distancia das aberturas ao eixo. O emissor (por exemplo
um LED) fornece radiação luminosa (visível ou não) e o receptor (normalmente um
fototransistor) recebe essa radiação modulada pela velocidade angular do disco.
12
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
Desta forma, com o movimento do disco, sempre que um feixe de luz passa
através das aberturas no disco é detectado pelo receptor que gera, através de um
condicionamento apropriado, um impulso elétrico. O número de pulsos produzidos
desde uma dada posição de referência é diretamente proporcional à posição angular
do disco; por exemplo, o deslocamento em relação a uma referência arbitrária é
conhecido por contagem de pulsos.
Assim, e para o exemplo concreto da figura 6.2 a, cada pulso de saída
corresponde a um deslocamento angular de _/6 radianos. Se ocorrerem quatro
pulsos desde a posição de referência, significa que a posição angular do eixo é de
2_/3 radianos. O processo de contagem é efetuado normalmente através de um
contador digital em que, por exemplo, o sinal de relógio é fornecido pela saída do
detector. Devido à natureza periódica do processo, ao fim de cada evolução
completa do disco o contador deve ser reinicializado a zero.
4.7 Características Fundamentais dos Sensores para
Automação
O sinal de um sensor pode ser usado para detectar e corrigir desvios em
sistemas de controle, e nos instrumentos de medição, que freqüentemente estão
associados aos sistemas de controle de malha aberta (não automáticos), orientando
o usuário, sendo caracterizados por:
13
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
Linearidade: É o grau de proporcionalidade entre o sinal gerado e a grandeza
física. Quanto maior, mais fiel é a resposta do sensor ao estímulo. Os sensores mais
usados são os mais lineares, conferindo mais precisão ao sistema de controle. Os
sensores não lineares são usados em faixas limitadas, em que os desvios são
aceitáveis, ou com adaptadores especiais, que corrigem o sinal.
Faixa de atuação: É o intervalo de valores da grandeza em que pode ser
usado o sensor, sem destruição ou imprecisão.
Histerese: É a distância entre os pontos de comutação do sensor, quando um
atuador dele se aproxima e se afasta. Este valor é importante, pois garante uma
diferença entre o ponto de acionamento e desacionamento, evitando que em uma
possível vibração do sensor ou acionador, a saída oscile.
Sensibilidade: É a distância entre a face do sensor e o atuador no instante em
que ocorre a comutação. As medidas na tabela são determinadas para um atuador
de chapa de aço quadrada com 1 mm de espessura, cujo lado é igual ao diâmetro
do sensor.
Superfície Ativa: É a superfície através da qual o campo eletro-magnético de
alta freqüência se irradia no meio externo. Esta área é definida pela superfície do
núcleo e corresponde aproximadamente à superfície da área externa deste núcleo.
Fator de correção: Fornece a redução da distância sensora em presença de
materiais cujas características apresentam desvios em relação ao ferro Fé 360
(definido pela ISSO 630).
Freqüência de Comutação: Corresponde à quantidade máxima de
comutações por segundo. Baseado nas características operacionais de cada
dispositivo, os transdutores são elementos de campo mais utilizados para controle,
enquanto queos sensores, também elementos de campo, são utilizados mais
especificamente em automação de processos.
Distância Sensora: Distância em que aproximando-se o acionador da face
sensora, o sensor muda o estado da saída.
Distância Sensora Nominal: Distância sensora teórica, a qual utiliza um alvo
padrão como acionador e não considera as variações causadas pela
industrialização, temperatura de operação e tensão de alimentação. É o valor em
que os sensores de proximidade são especificados. De acordo com a tabela a
seguir, é possível ter uma visão geral dos sensores a serem abordados:
14
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
4.8 Sensores Indutivos
Dispositivos de indução operam segundo o princípio de que havendo um
movimento relativo entre um campo magnético e um condutor, uma corrente poderá
ser induzida no condutor. Usualmente, o condutor é um fio, esse fio é enrolado de tal
maneira a produzir uma bobina. Assim que o campo magnético passa pela bobina,
ele induz nessa mesma bobina uma tensão que é proporcional à intensidade do
campo magnético, à velocidade do movimento e ao número de voltas do fio da
bobina.
A relutância em circuitos magnéticos é o equivalente à resistência em circuitos
elétricos. Um caminho de baixa relutância é um bom condutor magnético. Como
exemplo, se um material ferromagnético é aproximado de um imã permanente, o
campo que circunda o imã aumenta em intensidade, fazendo com que o fluxo seja
redirecionado para passar através do material.
De acordo com a figura a seguir, cada vez que o material magnético se
aproxima, o campo deverá ser alterado, e um pulso de corrente será induzido na
bobina.
4.8.1 Princípio de Funcionamento
Geração de um campo eletromagnético de alta freqüência, que é desenvolvido
por uma bobina ressonante instalada na face sensora.
15
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
A bobina faz parte de um circuito oscilador, que em condição normal
(desacionada), gera um sinal senoidal.
Quando um metal aproxima-se do campo, este por correntes de superfície,
absorve a energia do campo, diminuindo a amplitude do sinal gerado no oscilador.
Esta diminuição do valor original aciona o estágio de saída. Os sensores de
proximidade indutivos são equipamentos eletrônicos capazes de detectar a
aproximação de peças, componentes, elementos de máquinas, em substituição às
tradicionais chaves fim de curso.
A detecção ocorre sem que haja o contato físico entre o acionador e o sensor,
aumentando a vida útil do sensor por não possuir peças móveis sujeitas a desgastes
mecânicos.
4.9. Sensores Capacitivos
A capacitância depende da área das placas A, da constante dielétrica do meio,
_r, e da distância entre as placas, d:
Nos sensores Capacitivos podemos variar qualquer destes fatores, sendo mais
prático alterar a distância entre uma placa fixa e uma móvel, ou a área, fazendo uma
placa móvel cilíndrica ou em semicírculo (ou várias paralelas, como no capacitor
variável de sintonia) se mover em direção à outra fixa.
A variação na capacitância pode ser convertida num desvio na freqüência de
um oscilador, ou num desvio do equilíbrio (tensão) numa ponte feita com dois
capacitores e dois resistores, alimentada com corrente alternada. O desvio de
tensão será inversamente proporcional ao desvio na capacitância, neste caso e,
usando um sensor de distância entre as placas, será proporcional ao deslocamento
entre as placas.
Este método é usado em sensores de posição, força e pressão, havendo uma
mola ou diafragma circular suspenso por borda elástica (como o cone de um altofalante), suportando a placa móvel. Há também o sensor por diferença de
16
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
capacitância, que é um capacitor duplo, com duas placas fixas e uma móvel no
centro.
4.9.1. Princípio de Funcionamento
Baseia-se na geração de um campo elétrico, desenvolvido por um oscilador
controlado por capacitor.
O lado sensível de um sensor capacitivo é formado por dois eletrodos
metálicos dispostos concentricamente que se equivalem a um capacitor.
As superfícies dos eletrodos são conectadas em uma ramificação de
alimentação de um oscilador de alta freqüência sintonizado de tal maneira que não
oscilem quando a superfície está livre. Quando um objeto se aproxima da face ativa
do sensor, ele entra no campo elétrico sob a superfície do eletrodo e causa uma
mudança na capacitância do conjunto, ocorrendo uma oscilação com uma amplitude
tal que seja detectada por um circuito e convertida em um comando de
chaveamento.
4.10 Sensores Ópticos
4.10.1. Princípios de Funcionamento
Baseiam-se na transmissão e recepção de luz infravermelha, que pode ser refletida
ou interrompida pelo objeto a ser detectado.
17
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
4.10.2. Difusão
O transmissor e o receptor são montados na mesma unidade, sendo que o
acionamento da saída ocorre quando o objeto a ser detectado entra na região de
sensibilidade e reflete para o receptor o feixe de luz emitido pelo transmissor.
Distâncias nominais de até 2m aproximadamente.
4.10.3. Sensor Reflexivo
O transmissor e o receptor são montados na mesma unidade, sendo que o
acionamento da saída ocorre quando o objeto a ser detectado interrompe o feixe de
luz transmitido pelo transmissor que é refletido para o receptor por um espelho
prismático.
Este espelho faz garante o retorno da luz transmitida em feixe paralelo ao
recebido com inersão da polaridade. Essa característica proporciona ao sensor
reflexivo diferenciar uma superfície brilhante ou polida do espelho prísmático.
Distâncias nominais de até 20m aproximadamente.
18
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
4.10.4. Barreira de luz
O transmissor e o receptor são montados em unidades distintas, sendo que o
acionamento da saída ocorre quando o objeto a ser detectado interrompe o feixe de
luz transmitido pelo transmissor que é recebido pelo receptor.
Distâncias nominais de até 200m aproximadamente.
4.10.5. Exemplos de aplicações
19
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
4.11 Sensores Ultra-sônicos
4.11.1 Princípio de Funcionamento
O sensor emite pulsos cíclicos ultra-sônicos que refletidos por um objeto
incidem no receptor, acionando a saída do sensor.
20
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
Definição da faixa de medição.
Alinhamento angular
21
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
Alinhamento Angular – Aplicação
4.11.2. Exemplos de Aplicações
22
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
23
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
24
CLP
Prof.: Anderson Dias de Oliveira
SENAI – CFPOC/POUSO ALEGRE
5. Referências
[1] Pallás-Areny, R. e Webster, J. G. “Sensors and Signal Conditioning”. ISBN 0-47154565-1. John Wiley & Sons, Inc. (1991).
[2] Asch, G. et. al. “Les Capteurs en Instumentation Industrielle”. ISBN 2-04-0169482 Dunod (1987).
[3] Bolton, W. “Mechatronics: Electronic Control Systems in Mechanical and Electrical
Engineering”. ISBN 0-582-35705-5. Longman (1999).
[4] Bradley, D.A., Dawson, D., Burd, N.C. e Loader, A.J. “Mechatronics: Electronics in
Products and Processes”.ISBN 0-412-58290-2. Chapman & Hall (1991)
[5] J. G. Pinto, R.M. Vasconcelos, F. O. Soares, J. L. Monteiro, “High resolution yarn
mass measurement”, Conference Information Technology in Mechatronics, Istambul,
Turkey, 1-3 October, 2001, ISBN 975-518-171-1, pp425-430.
[6] Dailey, D. J. “Operational Amplifiers and Linear Integrated Circuits”. ISBN 0-07100693-1. McGraw-Hill (1991).
[7] Azinheira, J.R. “Sensores e Actuadores”. Instituto Superior Técnico
[8] Salgado, P. e Boaventura, J. “Instrumentação e Medidas”. Universidade de Trásos- Montes e Alto Douro (1996).
[9] Coelho, J.P., De Moura Oliveira, P.B. e Boaventura Cunha, J. "Greenhouse Air
Temperature Control using the Particle Swarm Optimisation Algorithm", 15th IFAC
World Conference on Automatic Control – Barcelona 2002
[10] Fraden, Jacob. “Handbook of Modern Sensors”. Third edition. ISBN 0-38700750-4. Springer (2004).
[11] Ripka, Pavel & Tipek, Alois. “Modern Sensors Handbook” ISBN 13:978-1905209- 66-8. ISTE Ltd (2007)
25
CLP
Prof.: Anderson Dias de Oliveira