D O S SI Ê T É C N I C O
Di m e n s i o n a m e n t o d e M o t o r e s El é t r i c o s
Gu s t a v o Pá e z
Re d e d e T e c n o l o g i a d a B a h i a – RET EC/B A
Abril 2007
DOSSI Ê T ÉCN I CO
6XPiULR
,1752'8d­2
2%-(7,92
7,326'(02725(6(/e75,&26
0RWRUHVGHFRUUHQWHFRQWtQXD
2.1.1 O circuito equivalente do Motor de Corrente Contínua, rotação,potência e torque
06
2.1.2 Motor de excitação série.
08
2.1.3 Motor de excitação em derivação ou shunt.
10
2.1.4 Motor de excitação composta ou compound.
11
2.1.5 Motor de excitação separada
12
2.1.6 Motor de imã permanente
12
0RWRUHVGHFRUUHQWHDOWHUQDGD
2.2 1Motores síncronos
13
2.2 2Características de potência e torque do motor síncrono
16
2.2.3 Motores de Indução
17
2.2.4 Circuito equivalente do motor de indução
18
2$&,21$0(1720275,=
&RQVLGHUDo}HVEiVLFDVSDUDRDFLRQDPHQWRGHXPDFDUJD
5(1',0(172()$725'(327Ç1&,$12602725(6(/e75,&26
'(&255(17($/7(51$'$
3$5Æ0(7526$6(5(0&216,'(5$'261$(/$%25$d­2'$(63(&,),&$d­2 '(02725
$61250$67e&1,&$63$5$(63(&,),&$d­2'(02725(6
(/e75,&26
(;(03/26'((63(&,),&$d­2'(02725
(VFROKDGHPRWRUSDUD%RPED
5HIHUrQFLDV
$QH[R
1
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
DOSSI Ê T ÉCN I CO
7tWXOR
Dimensionamento de Motores Elétricos
$VVXQWR
Fabricação de motores elétricos, peças e acessórios
5HVXPR
O trabalho de elaboração da correta especificação do motor elétrico projetado para a
utilização nos acionamentos motrizes de diversos processos industriais, é desenvolvido na
exposição sistemática dos parâmetros elétricos e mecânicos intervenientes nos cálculos de
dimensionamento, se ajustando,as recomendações contidas das normas técnicas, definindo
ainda as variáveis de operação para os diversos regimes de trabalho.
3DODYUDV&KDYH
Dimensionamento;eletricidade; motor; motor elétrico
&RQWH~GR
,1752'8d­2
O adequado dimensionamento dos motores elétricos se constitui na atualidade num
fundamento essencial na eficiência energética dos sistemas elétricos, que proporciona como
conseqüência um alto rendimento produtivo do processo fabril ao qual estão associados.
O conhecimento dos parâmetros elétricos e mecânicos envolvidos, junto com a aplicação das
normas técnicas são necessários no seu dimensionamento nos acionamentos de
equipamentos de processo industrial, para atingir um desempenho satisfatório.
São apresentadas as características fundamentais dos vários tipos de motores elétricos
existentes, que intervém diretamente no seu dimensionamento sendo que inicialmente são
expostos os fundamentos teóricos comuns a todos os tipos de máquinas elétricas girantes
Os equipamentos acionados, do mesmo modo que os acoplamentos ao motor elétrico são
analisados do ponto de vista energético.
Dos vários tipos de motores elétricos existentes, o motor de indução de corrente alternada é
o que encontra maior aplicação nos acionamentos existentes nos processos industriais, daí
que neste trabalho tenha um destaque maior.
2%-(7,92
A elaboração deste documento visa disponibilizar uma consulta rápida para o adequado
dimensionamento energético dos motores elétricos nos acionamentos mais comuns nos
processos industriais,
7,326'(02725(6(/e75,&26
A energia elétrica se caracteriza como serviço público deve estar ao alcance de toda a
sociedade, e devido a sua propriedade de ser um tipo de energia que não pode ser
2
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
armazenada na sua própria forma, tem de ser consumida no mesmo instante em que é
gerada a partir de qualquer das fontes primarias, necessitando para o atendimento da
demanda requerida, um cuidadoso planejamento de modo a antecipar a oferta em relação a
essa mesma demanda.
Daí surge a necessidade do dimensionamento adequado dos reservatórios para o
armazenamento de energia primaria e das redes de transmissão e distribuição, para a
potência elétrica de transporte, ajustando os valores das perdas aos mínimos possíveis, e.há
ainda a preocupação crescente quanto à eficiente utilização desta energia pelos
consumidores, já que da forma que for feito o uso da energia influirá no planejamento do
dimensionamento da demanda de potência a ser atendido pela distribuição, transmissão e
geração do sistema elétrico.
O motor elétrico é um equipamento de uso final da energia elétrica, que transforma a energia
da forma elétrica para a forma mecânica. Assim o motor é um elemento de transferência
entre a rede elétrica e o sistema mecânico acionado.
Os motores elétricos são classificados de modo geral de acordo com a corrente de
alimentação em motores de corrente contínua e motores de corrente alternada.
Os motores de corrente contínua podem ser, de excitação série, de excitação em derivação
ou shunt de excitação composta ou compound, excitação separada e de excitação por imã
permanente.
Já os motores de corrente alternada são classificados de forma geral de acordo ao número
de fases na sua alimentação de energia podem ser monofásicos ou trifásicos.
No quadro da FIG 1 visualiza-se a classificação geral dos motores apresentada no manual de
motores elétricos da WEG.
Figura1: Classificação dos motores elétricos
Fonte : Manual WEG
0RWRUHVGHFRUUHQWHFRQWtQXD
Os motores de corrente contínua são construídos com uma parte fixa estator ou indutor onde
estão localizados os pólos magnéticos, e uma parte móvel, rotor ou induzido e também
chamado armadura.
A corrente é conduzida aos enrolamentos da armadura por meio de escovas aos terminais de
bobina no comutador.
Na FIG. 2 a seguir é mostrado o motor elementar de corrente contínua, os pólos note e sul,
3
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
formam o estator ou indutor, e uma espira com seus terminais nas duas escovas dão forma
ao rotor ou armadura.
Figura: 2 Motor elementar de corrente contínua.
Fonte: Manual Weg
O estator ou indutor é formado pela carcaça e as peças polares e tem como finalidade
produzir o campo magnético. Este campo pode ser produzido por um imã permanente ou por
eletroímã, sendo que este último apresenta a vantagem de produzir um campo magnético
regulável.
Figura 3 Motor de Corrente Contínua de dois pólos
Fonte: Manual Weg
Como mostrado na FIG. 3, o indutor do motor de corrente continua é formado pela carcaça, o
enrolamento de campo ou bobinas de campo, pólos interpolos, enrolamentos de
compensação e porta escovas e escovas.
A carcaça sustenta as demais partes do motor e ainda atua como caminho de retorno para o
fluxo no circuito magnético criado pelas bobinas de campo.
4
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
O enrolamento de campo (bobinas de campo) é formado por espiras dispostas nas sapatas
polares,são os eletroímãs que com os ampéres espiras dão origem a força magneto
motriz,(f.m.m) para a produção de fluxo no entreferro, espaço entre o campo e a armadura,
necessário para a geração da força mecânica.
As peças polares ou sapatas polares são construídas em ferro maciço,ou em pacote de
laminas de chapas de aço silício aparafusados ao estator, sendo que as bobinas de campo
são colocadas nestas peças polares ou sapatas polares, enroladas de forma produzir
polaridades opostas quando da circulação de corrente.
Estas peças polares são dispostas em forma circular concêntrica ao eixo do rotor ou
armadura, como mostra a figura 3.
Quando necessário em motores de grande porte,são utilizados pólos adicionais chamados de
interpolos localizados entre os pólos principais com a finalidade de reduzir o efeito de
distorção de fluxo chamado de reação de armadura.
Os enrolamentos de compensação colocados em ranhuras axiais na sapata polar são
opcionais.
Figura 4: Motor de Corrente Contínua Carcaça com peças polares e Induzido/armadura com o coletor.
Fonte: Curso de Mestrado em Regulação da Indústria de Energia -Universidade do Salvador –
UNIFACS
Os interpolos e enrolamentos de compensação são ligados em série com o circuito da
armadura para que a f.m.m. produzida seja proporcional á corrente da mesma.
O induzido ou armadura, a parte girante do motor de corrente contínua, é constituída por o
eixo da armadura ,que é apoiado em mancais para permitir a rotação de armadura,
enrolamentos e comutador.
O núcleo da armadura está conectado ao eixo e é construído de camadas laminadas de aço
silício, provendo uma faixa de baixa relutância magnética entre os pólos. As lâminas servem
para reduzir as correntes parasitas no núcleo, e ainda para produzir uma baixa perda por
histerese. O núcleo contém ranhuras axiais na sua periferia para colocação do enrolamento
da armadura.
Enrolamento da armadura: é constituído de bobinas isoladas entre si e do núcleo da
armadura. É colocado nas ranhuras e eletricamente ligado ao comutador.
O comutador: devido à rotação do eixo, providencia o necessário chaveamento para o
processo de comutação. O comutador consiste em laminas de cobre, individuais isoladas
entre si e do eixo, eletricamente conectados às bobinas do enrolamento da armadura.
Escovas e Anéis-Suporte de Escovas: assim como os interpolos, são parte do circuito da
armadura. As escovas são de carvão e grafite, suportadas na estrutura do estator por um
suporte tipo anel, e mantidas no suporte por meio de molas, de forma que as escovas
manterão um contato firme com os segmentos do comutador. As escovas estão sempre
instantaneamente conectadas a um segmento e em contato com uma bobina a localizada na
5
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
zona interpolar.
Figura 5 : Corte de um Motor de Corrente Contínua.Ref Catálogo G.E.
Fonte : Manual Weg
2FLUFXLWRHTXLYDOHQWHGR0RWRUGH&RUUHQWH&RQWtQXDURWDomRSRWrQFLDHWRUTXH
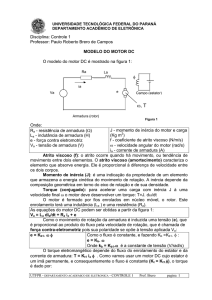
O circuito do motor de corrente contínua é mostrado na FIG.6
Figura 6: Circuito modelo do Motor de Corrente Contínua
Fonte: Manual Weg
De acordo a Lei de Kirchhoff no circuito armadura,
9D
Onde:
5D ,D
(
9DTensão de Armadura
5DResistência de Armadura
(Força Eletromotriz Induzida (fem) ou Contra-Força Eletromotriz (c.f.e.m)
A velocidade angular da armadura é,
Z . S . I
e
I
Onde:
3. Q
(2)
(3)
Z Velocidade angular em radianos por segundo
IFreqüência em Hertz
Q Velocidade de rotação em r.p.m.
6
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
A força eletromotriz induzida é
Z 1 D ) S
(
S
(4)
Ao introduzir as equações (2) e (3) na equação (4) a força eletromotriz induzida fica,
Q 3 1 D) S
(
Onde:
(5)
1 D Número de espiras de condutor na armadura
) S Fluxo por pólo no entreferro do motor, em Webers
Cada espira de bobina na armadura tem dois condutores, lados de bobina. Assim também,
em termos de espiras de condutor na armadura há
1D
Onde:
]D
(6)
] D Número total de condutores na armadura
Na prática uma máquina tem muitas bobinas na armadura que são distribuídas no induzido
em disposição série - paralelo com no mínimo de duas ranhuras paralelas. Uma expressão
para o valor médio da f.e.m. induzida, nos termos de condutores totais de armadura, é obtida
substituindo a equação (6) na equação (5). Ao fazer a substituição:
(
Onde:
Q3 ] D) S
D
(7)
D Número de ranhuras em paralelo
O tamanho do rotor do motor, do número de pólos do rotor, e a forma como esses pólos são
interconectados variam segundo a potência do motor, de tal modo que para cada motor de
corrente contínua há uma constante de valor:
N
] D3
D
(8)
Desta forma finalmente, a força eletromotriz de armadura fica
( NQ) S
(9)
Esta expressão ratifica a Lei da Indução de Faraday, que estabelece que a força eletromotriz
induzida é proporcional ao fluxo e à rotação.
Das equações (1) e (9) deduzidas do circuito equivalente, determina-se a velocidade de
rotação do motor de corrente contínua :
Q
9D
5D ,D
N)
[r.p.m.]
(10)
A potência mecânica desenvolvida no eixo do motor é:
3 ( ,D [ watts]
(11)
E o torque mecânico desenvolvido no eixo é:
7
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
7
( ,D
Z
[Nm]
(12)
Normalmente a potência mecânica do motor é especificada em kW. CV ou HP e a velocidade
de rotação em r.p.m.
A seguir as equações para o cálculo da potência nessas unidades e a equação para
determinação do torque mecânico quando a velocidade de rotação do motor esta em r.p.m
(TAB.1).
Em kW
Potência
3
do Motor
( ,D Em CV
3
Torque mecânico no
eixo do Motor
7
(velocidade em
( ,D Em HP
3
( ,D
Q S
( ,D [Nm]
r.p.m)
Tabela 1: Equações para potência e torque dos motores de corrente contínua
Fonte: Curso de Mestrado em Regulação da Indústria de Energia -Universidade do Salvador –
UNIFACS
Os terminais das máquinas de corrente contínua obedecem a uma nomenclatura normalizada
estabelecida pela norma IEC “International,Electrical Comission” e pela norma ANSI
“American National Standards Institute. (TAB.2)
Norma Técnica
Elemento
IEC
ANSI
Armadura ou Induzido
AB
A1 A2
Campo derivação ou Shunt
CD
F1 F2
Campo série
EF
S1 S2
Tabela 2 Nomenclatura elementos dos motores
de corrente conínua
Fonte: Curso de Mestrado em Regulação da Indústria de Energia -Universidade do Salvador –
UNIFACS
0RWRUGHH[FLWDomRVpULH
Este motor tem as bobinas de campo do indutor ligadas em série com o induzido ou
armadura, de tal modo que circula a mesma corrente por ambos, motivo pelo qual as bobinas
de campo são constituídas de condutor de bitola grossa e com poucas espiras, o que faz
deste motor um equipamento bastante robusto (FIG.7).
Figura 7: Excitação série bobinas de campo e
8
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
armadura ligadas em série.
Fonte: Manual Weg
No motor série, a corrente de armadura e a corrente do campo-série são as mesmas e o
fluxo produzido pelo campo-série é, em todo instante, proporcional à corrente de armadura.
Só há fluxo no entreferro da máquina quando a corrente da armadura for diferente de zero
(máquina carregada) .Assim o torque do motor série é proporcional ao quadrado corrente e
sua potência constante.
7 v ,D
Desde que o núcleo polar seja não-saturado, a relação entre o torque do motor série e a
corrente de carga é exponencial, motivo pelo qual. o motor com excitação série não pode
trabalhar em vazio, pois tende a acelerar continuamente e conseqüentemente atingir
elevadíssimas velocidades que podem provocar a desintegração do rotor da máquina (FIG.8).
Figura 8 : Curva característica do motor excitação série
Fonte : Manual Weg
Desde que o núcleo polar seja não-saturado, a relação entre o torque do motor série e a
corrente de carga é exponencial, motivo pelo qual. o motor com excitação série não pode
trabalhar em vazio, pois tende a acelerar continuamente e conseqüentemente atingir
elevadíssimas velocidades que podem provocar a desintegração do rotor da máquina.
Desta forma o motor com excitação série não é apropriado para acionamentos ou
transmissões motrizes com acoplamentos do tipo polia e correia (FIG.9).
Figura 9: Representação do Motor série de acordo à norma IEC
Fonte : Manual Weg
Com o torque de partida bastante elevado, decaindo com o aumento da velocidade, o motor é
largamente empregado em sistemas de tração e elevação de cargas, onde inicialmente é
necessário um alto torque de partida e, após atingir a faixa de velocidade estabelecida,um
pequeno torque para suprir as perdas de atrito e ventilação da máquina.
0RWRUGHH[FLWDomRHPGHULYDomRRXVKXQW
No motor shunt a corrente de campo não é afetada pela carga, enquanto que a tensão
aplicada ao motor seja constante. A armadura e o campo estão submetidos a mesma tensão
o que produz uma velocidade constante independente da carga (FIG.10)
9
!"#$ % &'(
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
Figura 10: Motor shunt as bobinas do campo indutor e
Armadura/induzido estão ligadas em paralelo
Fonte : Manual Weg
Durante a partida e funcionamento normal, a corrente no circuito do campo-shunt é
essencialmente constante para um valor estabelecido para o reostato de campo e o fluxo é
também essencialmente constante.
Aumentando-se a carga mecânica, a velocidade diminui, causando uma diminuição na contra
força eletromotriz e um aumento na corrente da armadura. Dessa forma, o torque pode ser
expresso como uma relação linear da corrente de armadura.
7 v ,D
Se o motor-shunt ao atingir a velocidade nominal e estiver operando sem carga, o fluxo polar
do motor, ignorando a reação da armadura, pode ser considerando constante e a velocidade
do motor pode ser expressa em função da equação básica da velocidade(GRA.1):
Gráfico 1: Curva característica do motor shunt
Fonte : Manual Weg
Quando uma carga mecânica é aplicada ao eixo do motor, a contra força eletromotriz
decresce e a velocidade cai proporcionalmente. Mas, como essa contra força eletromotriz
desde vazio até a plena carga sofre uma variação de 20% a velocidade do motor é
essencialmente constante.
Porém o motor campo shunt ou paralelo dispara na ausência de excitação do campo
(FIG.12).
10
!"#$ % &'(
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
Figura 11: Representação do Motor shunt
de acordo à norma IEC
Fonte : Manual Weg
Por estas características o motor shunt é utilizado para acionar equipamentos nos quais não
seja necessário partida a plena carga, mas que se necessite uma velocidade quase
constante.ou velocidade ajustável por a variação da tensão de armadura, como é o caso de
máquinas de ferramentas como tornos, retíficas de precisão.
0RWRUGHH[FLWDomRFRPSRVWDRXFRPSRXQG
O motor compound ou composto tem a excitação dos campos série e shunt ao se combinam
enrolamentos destes campos o motor poderá ser composto cumulativo ou diferencial
(FIG.12).
Figura 12 Representação do Motor compound cumulativo e diferencial
de acordo à norma IEC
Fonte : Manual Weg
No composto cumulativo, o fluxo do campo-série se soma ao fluxo do campo-shunt e, no
caso do motor composto diferencial, há um antagonismo entre os campos. A corrente no
circuito campo-shunt e o fluxo polar, durante a partida ou funcionamento normal, são
constantes. A corrente no campo-série é uma função da corrente de carga solicitada pela
armadura.
O motor compound cumulativo possui características semelhantes ao do motor com
excitação série, com a vantagem de um maior torque de partida e de não disparar em vazio.
Já o motor compound diferencial possui características semelhantes ao do motor com
excitação shunt com um menor torque de partida e uma velocidade mais constante.
11
!"#$ % &'(
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
Figura 13: Curvas velocidade – corrente de armadura
em motores série shunt e compound
Fonte : Manual Weg
0RWRUGHH[FLWDomRVHSDUDGD
No motor de excitação independente,os enrolamentos do campo indutor e da armadura ou
induzido formam circuitos elétricos independentes com distintas tensões de alimentação.
Mesmo assim,este motor também apresenta uma característica de velocidade constante para
qualquer valor de carga (FIG.14).
Figura 14 : Representação do Motor de excitação separadal
de acordo à norma IEC
Fonte : Manual Weg
Neste motor existe a vantagem de se poder inverter o sentido de rotação ao se inverter a
polaridade de uma das fontes de alimentação mantendo uma velocidade constante,sendo
seu uso.indicado para instalações de radar e antenas parabólicas
0RWRUGHLPmSHUPDQHQWH
Normalmente são motores de pequena potência,que possuem um imã fixo como campo no
estator, e uma armadura alimentada em corrente contínua por meio de um conjunto escova –
comutador. O comutador tem a finalidade de manter circulando a corrente no rotor sempre
num mesmo sentido dando origem a um torque motriz nesse sentido de giro.
Este tipo de motor tem grande volume de aplicação nas indústrias de brinquedos e
automotiva tendo ainda outras aplicações industriais,.onde são aproveitadas as vantagens
da.variação da sua velocidade pelo ajuste de tensão nos seus terminais, e versatilidade desta
máquina trabalhar como gerador de tensão contínua diretamente proporcional à velocidade,
quando da aplicação de uma força de rotação no seu eixo, o que permite sua utilização como
tacômetro.
Devido ao atrito e conseqüente faiscamento do conjunto escova comutador, que podem
produzir interferência eletromagnética em circuitos eletrônicos este motor apresenta baixa
!"#$ % &'(
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
12
vida útil como sua maior desvantagem ( TAB.3).
Tipo
Torque de partida
Velocidade
Utilização
Série
Alto
Variável, dispara em
Tração elevadores de
vazio
carga
Constante
Máquinas
Shunt
Baixo
ferramentas
Compound cumulativo
Alto
Pouco variável
Aparelhos Elevadores
Compound diferencial
Baixo
Constante
Máquinas
ferramentas e de
tecelagem
Excitação separada
Baixo
Constante
Radar
Tabela 3 Comparativo dos motores de corrente contínua
Fonte: Curso de Mestrado em Regulação da Indústria de Energia -Universidade do Salvador –
UNIFACS
Como desvantagens dos motores de corrente contínua podem-se enumerar:
•
•
•
•
Manutenção freqüente, escovas e comutador;
São mais caros e volumosos;
Reparo demorado e oneroso;
São ruidosos e produzem interferência eletromagnética.
0RWRUHVGHFRUUHQWHDOWHUQDGD
Na industria os motores de corrente alternada na sua grande maioria são motores trifásicos e
de acordo a sua construção podem ser síncronos ou assíncronos também chamados de
indução.
Diferentemente dos motores de corrente contínua os motores de corrente alternada trifásicos
são alimentados com três fases de tensões senoidais com a mesma freqüência angular e
amplitude, porem deslocadas em ângulo de 120º elétricos,a três enrolamentos dispostos nas
ranhuras do estator, também formando ângulos elétricos de 120º produzindo um campo
magnético girante cuja velocidade depende da freqüência da fonte de suprimento e do
número de pólos formados por cada fase.
0RWRUHVVtQFURQRV
No motor síncrono uma corrente contínua de campo produz um campo magnético no rotor do
motor. sendo que nos enrolamentos do estator da máquina é aplicado um sistema de trifásico
de tensões que produz um campo magnético girante.
Estes dois campos tendem a alinhar-se; no entanto os campos do rotor e do estator nunca
ficam perfeitamente alinhados, pois mesmo sem carga o rotor possui uma determinada
inércia e por tanto sempre haverá um desfasamento entre os dois campos, embora girando à
mesma velocidade.
Este desfasamento é medido pelo angulo chamado deângulo.de torque, que é tanto maior
quanto maior for o torque resistente, mas constante enquanto o torque resistente for
constante.
Os motores síncronos possuem como características essenciais a garantia da velocidade
dada a freqüência de alimentação já que o motor apresenta velocidade constante sob
variação da carga até atingir o seu torque máximo, e o controle sob o fator de potência
13
!"#$ % &'(
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
através da excitação de campo.
O controle do fator de potência é feito sobre a regulação da corrente de campo que não afeta
a potência desenvolvida no eixo do motor, e por este motivo é possível também o controle
dentro de certos limites a corrente absorvida da rede pelo motor.
Desta forma, quando aplicada ao campo uma corrente maior que a necessária para seu
funcionamento, o motor se transforma em uma carga capacitiva para a rede de suprimento
(FIG.15) .
Figura 15: Campo magnético no motor síncrono
Fonte: Curso de Mestrado em Regulação da Indústria de Energia -Universidade do Salvador –
UNIFACS
Trabalha o motor desta forma superexcitado.se tornando um equipamento extremamente útil
ao possibilitar seu uso para compensar a energia reativa consumida por outros motores numa
mesma instalação (FIG.16).
14
!"#$ % &'(
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
)+*,.-0/2143650-+, 798+:4; *=< 8+10>,?; @4-
)+*,.-0/2193A50-+, 7984:+; *CBD8E; , F9/?; -
)+*,.-0/2193A50-+, 7984:+; *HGI*EJ+*+:4; ,K; @9-
Figura 16:controle do fator de potência com a corrente de excitação
Fonte: Curso de Mestrado em Regulação da Indústria de Energia -Universidade do Salvador –
UNIFACS
Por isto muitas concessionárias do serviço público de energia elétrica possuem algumas
máquinas deste tipo ligadas em alguns pontos da rede, normalmente a funcionar em vazio,
para que toda a sua potência aparente esteja disponível para “fornecer” ou “consumir”
energia reativa indutiva. Estas máquinas assumem a designação de FRPSHQVDGRUHV
VtQFURQRV (FIG.17)
Figura 17: Curvas em “V” do motor síncrono
Fonte: Curso de Mestrado em Regulação da Indústria de Energia -Universidade do Salvador –
UNIFACS
O motor síncrono não tem torque ao se conectar à rede de suprimento a partir do repouso, se
15
!"#$ % &'(
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
não à velocidade de sincronismo, e deve ser dada a partida por um processo auxiliar, como
um motor de arranque que leve o conjunto motor+carga até à velocidade correta e depois
seja desligado,havendo ainda a alternativa da partida assíncrona, possível quando o motor
possui um enrolamento amortecedor, do tipo gaiola de esquilo como um tipo de motor de
indução.
Desse modo, não alimentando o enrolamento de excitação, obtém-se um modo de
funcionamento assíncrono, que possibilita atingir uma velocidade muito próxima da de
sincronismo, sendo então possível que ao alimentar o enrolamento de excitação o torque
oscilante leve o motor à velocidade de sincronismo.
Figura 18 : Esquema do circuito equivalente da máquina síncrona
Fonte: Curso de Mestrado em Regulação da Indústria de Energia -Universidade do Salvador –
UNIFACS
&DUDFWHUtVWLFDVGHSRWrQFLDHWRUTXHGRPRWRUVtQFURQR
Uma máquina síncrona está normalmente ligada a um barramento de tensão fixa, e roda a
uma velocidade constante. Existe então um limite para a potência que uma máquina
funcionando como gerador consegue entregar à rede, sem perda de sincronismo.
No circuito equivalente, sendo:
9W
9W ;
(13)
(
( G (14)
M ;V
e =V 5V
(15)
=V
=V MV
(16) a potência aparente é
9W
( M M
9W MM
S
G
MV
6
H
H
.......(17)
=V
=V
Ao se desprezar 5Vfica =V ;Ve MV
trifásica a potência ativa é:
3
S
9I ( ;V
em radianos, portanto para uma máquina
VHQ G em W ou kW
(18)
Ao trabalhar a máquina síncrona como motor na equação (18) da potência, o ângulo de de
torque , representa a carga mecânica, e pode ser visualizado dado o atraso que o eixo polar
do rotor tem relativamente ao eixo polar do estator.Pode verificar-se que esse ângulo
aumenta com a carga, e o seu máximo é novamente
A expressão do torque do motor é então :
7
3
ZV
9W (
ZV ;V
Onde I é a freqüência da rêde.
S
9W (
em Nm
S I ;V
(FIG.19)
16
!"#$ % &'(
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
Figura 19 : Torque do motor síncrono
Fonte: Curso de Mestrado em Regulação da Indústria de Energia -Universidade do Salvador –
UNIFACS
A FIG. 20 mostra um quadro sinóptico da aplicação dos motores de indução e síncronos, em
função da potência (CV) e velocidade (RPM), onde se pode notar a supremacia absoluta dos
motores de indução de qualquer potência para os motores de alta velocidade (2 e 4 polos em
60 Hz.)
Figura 20: Quadro sinóptico de aplicação de motores de indução e síncronos
Fonte: Curso de Mestrado em Regulação da Indústria de Energia -Universidade do Salvador –
UNIFACS
0RWRUHVGH,QGXomR
Os motores de indução trifásicos são os mais utilizados industrialmente e, dentre eles, o de
rotor em gaiola, cujo campo de aplicação se estende, praticamente, a todo tipo de
acionamento.
A sua robustez, baixo custo, simplicidade operacional e de manutenção, o tornam preferido
para acionar máquinas de qualquer potência. Sua principal limitação, que residia no fato de
ele ser um motor de velocidade praticamente constante, isto é, não proporcionar condições
de um eficiente controle de velocidade, está sendo hoje superado pelo uso extensivo de
inversores estáticos de freqüência para fazer este tipo de controle. Os motores de rotor
17
LMNOP Q RST
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
bobinado ou de anéis são utilizados em aplicações onde se deseja manter um elevado torque
de aceleração, como por exemplo na operação de pontes rolantes.
O rotor do motor de indução gira a uma velocidade Qmenor do que a velocidade Qdo
campo magnético girante do estator. A velocidade Qdo campo magnético girante do estator
está relacionada com a freqüência da rede e o número 3 de polos do motor através das
seguintes equações
3 Q I
Q
(20)
I (21):
3
A diferença entre as duas velocidades é chamada HVFRUUHJDPHQWR. Devido ao
escorregamento, um campo magnético girante é induzido no enrolamento do rotor e, da
interação entre os dois campos magnéticos, resulta o WRUTXHHOHWURPDJQpWLFRGRPRWRUque
o faz girar.
O escorregamento é tomado sempre em valores percentuais ou em por unidade (p.u),. da
velocidade síncrona, ou seja:
Q
V
Q
Q
Q Q V
(22)
(23)
Normalmente para o desenvolvimento dos cálculos no sistema internacional de medidas se
expressa a velocidade dos motores com já visto em radianos por segundo :
Z
S Q
(24)
&LUFXLWRHTXLYDOHQWHGRPRWRUGHLQGXomR
Figura 21: Circuito equivalente do motor de indução
Fonte: Curso de Mestrado em Regulação da Indústria de Energia -Universidade do Salvador –
UNIFACS
Onde:
9 = tensão por fase aplicada ao motor.
( = tensão induzida pelo fluxo girante nos terminais do motor
, = corrente do estator.
U= resistência ôhmica do enrolamento do estator.
[ = reatância de dispersão do enrolamento do estator.
UZ = resistência equivalente às perdas magnéticas do estator.
[P = reatância de magnetização.
,R= corrente a vazio.
18
LMNOP Q RST
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
,Z= corrente correspondente às perdas magnéticas do estator.
,P = corrente magnetizante.
U= resistência de uma fase do enrolamento do rotor, referida ao estator.
[ = reatância de dispersão de uma fase do rotor, referida ao estator.
,= corrente do rotor, referida ao estator.
A potência de placa de um motor de indução trifásico é dada em CV ou HP assim. as
potências elétricas do motor podem ser calculadas a partir dos dados de placa do motor:
•
Potência aparente do motor
6
3 em kVA para P em CV ou 6
FRV M K
3 em kVA para P em HP
FRV M K
Onde
(25)
FRV M é o fator de potência e o rendimento do motor
Potencia ativa absorvida pelo motor
3 6 FRV M em kW
(26)
• Potencia reativa absorvida pelo motor
4 6 VHQ M em kVAR
(27)
Com a tensão nominal do motor calcula-se a corrente,
•
,
6
9
em ampéres estando expressa a tensão V em kV
(28)
Do circuito equivalente pode-se calcular:
SH
•
Perdas no estator.
•
Perdas no rotor
SU
•
Perdas no ferro
SI
, U
, U
(
(29)
(30)
(31)
UZ
Ainda há que adicionar as perdas por atrito e ventilação SDY e as perdas adicionais SD
•
Potencia no entreferro do motor
3J
SU
V
(32)
O rendimento do motor de indução é determinado por
3 SH SU SI SDY SD (33)
3
SU V Potência mecânica do motor no eixo
3P
em W ou kW
V
3P
7Q
O torque mecânico nominal do motor é
em Nm
(35)
ZU
K
•
•
(34)
Onde 3Pdeve estar expresso em Watts e Ua rotação nominal do motor em radianos
por segundos. Lembrando a conversão de Q em r.p.m. para U em radianos como
mostra q equação (24)
• 7RUTXH GH SDUWLGD RX 7RUTXH FRP URWRU EORTXHDGR 73 É o torque que o motor
desenvolve no momento em que ele é ligado a uma rede de tensão e freqüência nominais,
com o rotor parado.
• 7RUTXH PtQLPR 7PtQ É o menor valor que o torque assume durante o período de
aceleração, representado pelo ponto mais baixo da característica, entre a velocidade zero e a
velocidade correspondente ao torque máximo, sob tensão e freqüência nominais. É um valor
importante de se conhecer, principalmente quando são usadas chaves redutoras de tensão
para dar a partida no motor.
• 7RUTXH Pi[LPR RX 7RUTXH FUtWLFR 7P É o máximo valor de torque que o motor pode
desenvolver durante a sua operação. Ele divide a curva característica em duas regiões
distintas: a primeira, chamada UHJLmR HVWiYHO compreendida entre o torque máximo e o
19
UVWXY Z [\]
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
torque nulo (V = 0); a segunda, chamada UHJLmR LQVWiYHO compreendida entre o torque
máximo e o torque de partida. O motor trabalha em suas condições normais na região
estável, no ponto de encontro das curvas características do motor e da máquina acionada.
Enquanto o motor trabalhar nesta região, o seu funcionamento será estável, isto é, a toda
variação do torque da máquina acionada corresponderá uma variação do torque motor no
mesmo sentido. Porém, se por qualquer razão o torque da máquina acionada aumenta o seu
valor e ultrapassa o valor do torque máximo do motor, mesmo que momentaneamente, o
motor não terá como equilibrar este aumento com um aumento do seu torque. À medida que
o torque da máquina faz aumentar o escorregamento, o torque do motor diminui e ele entra
num processo de desaceleração até parar. Por este motivo, torque máximo recebe também o
nome de torque crítico e o escorregamento correspondente é chamado de escorregamento
crítico. O valor do torque crítico determina a capacidade momentânea de sobrecarga
mecânica do motor. Quando ele é tomado em por unidade (p.u). do torque nominal, que é o
caso normal, recebe o nome de )DWRU GH VREUHFDUJD PHFkQLFD e é representado na
literatura técnica pela letra grega .
g
gEh
g9i
gEhkj l
gEl
Figura 22: Curva de torque do motor de indução Norma ABNT NBR 7094
Fonte: Curso de Mestrado em Regulação da Indústria de Energia -Universidade do
Salvador – UNIFACS
7RUTXHQRPLQDORXGHSOHQDFDUJD7QCE o conjugado que o motor desenvolve na sua
condição nominal de operação, isto é, com tensão e freqüência nominais aplicadas aos
terminais do motor, ele gira à velocidade nominal, fornecendo a potência nominal no seu
eixo.Os catálogos dos fabricantes fornecem o torque nominal útil, disponível no eixo, do qual
já foi subtraído o torque associado às perdas rotacionais.
Da mesma forma, os valores de 7Se 7P, que são dados em porcentagem ou em p.u. deste
valor.
A norma brasileira ABNT NBR-7094, que fixa os requisitos básicos a serem atendidos pelos
motores de indução, estabelece o que ela denomina de categoria dos motores de indução
trifásicos de rotor em gaiola à qual estão associadas as grandezas torque de partida, torque
mínimo e torque máximo que, por sua vez, dependem do valor da resistência do rotor.
Estas categorias receberam as designações N, H e D e as características de torque típicas
correspondentes são mostradas na figura 23 As configurações dependem do valor da
resistência do rotor. Assim, por exemplo, um motor de categoria D possui uma resistência de
rotor maior do que os de mesma potência e número de pólos das demais categorias, sendo o
de categoria N o de menor resistência.
Ainda segundo a ABNT NBR-7094, para que os motores sejam enquadrados em cada uma
das categorias acima, eles devem satisfazer a valores mínimos de torque de partida, torque
mínimo e torque máximo, conforme tabelas estabelecidas e aceitas em comum acordo por
todos os fabricantes.
20
^_`ab c def
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
Esta classificação dos motores em categorias é válida para motores de fabricação seriada,
com tensão até 600 V e com limite de potência e número de pólos. Os grandes motores
especiais, de tensão e potência superiores aos valores normalizados pela norma ABNT NBR7094, também podem nela se enquadrar de acordo com os valores de seus torques.
De uma maneira geral, podemos dizer que os motores de categoria N devem ser usados no
acionamento de cargas que possuem um baixo conjugado resistente na partida, tais como
bombas centrífugas, ventiladores, exaustores, etc. Estes motores possuem um baixo
conjugado de partida comparado com as duas outras categorias.
Os motores de categoria D são ideais para o acionamento de cargas de grande impacto tais
como as prensas ou máquinas de corte que exigem um elevado conjugado durante a sua
operação e que operam em regimes intermitentes.
Os motores de categoria H são aplicados em situações intermediárias entre a categoria N e D
e são muito usados no acionamento de ventiladores de grande potência e elevada inércia. Os
motores de dupla gaiola ou de barras profundas são exemplos típicos de motores desta
categoria:
Figura 23 Curvas de torque para motores de indução
segundo norma ABNT NBR 7094.
Fonte: Curso de Mestrado em Regulação da Indústria de Energia -Universidade do Salvador –
UNIFACS
Em geral, o mínimo torque disponível 7G para aceleração deve ser ao menos 10% do torque
nominal de plena carga.Isto quer dizer que em qualquer ponto do período de aceleração
dever-se-á cumprir a equação:
7G
7P
7Q
7U
em p.u
(36)
Onde 7P é o torque motriz após considerar as eventuais quedas de tensão que afetam o
torque nominal do motor e 7Ué o torque resistente da carga referido ao eixo do motor.
A norma ANSI/NEMA MG.01.20.4.1,indica que as curvas de torque motriz e torque resistente,
até atingir-se a velocidade de regime nominal, devem guardar a relação de no mínimo de Assim o torque acelerante 7D será no mínimo em por unidade [p.u.],
7D 7S
7S
p.u. (37)
Ao se considerar as tolerâncias prescritas pelas mesmas normas técnicas, que permitem em
geral aos fabricantes de máquinas girantes um desvio de 10% do valor garantido do torque
de partida, uma partida satisfatória para um conjunto motor de indução mais carga terá um
torque disponível de:
21
^_`ab c def
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
7G 7S
7S
7S
em pu
(38)
,QpUFLD
No regime de trabalho de um motor alem da definição da duração do ciclo é necessário
especificar a inércia do motor e a inércia externa da carga, ambas referidas ao eixo do motor.
•
A norma ABNT NBR 7094 estabelece que a inércia externa de um motor de indução obedece
a equação:
- 3P
S
em kgm²
(39)
Onde:
3PPotência no eixo do motor em kW
Snúmero de pares de pólos
2DFLRQDPHQWRPRWUL]
Quando o conjunto motor carga se põe em movimento, aparecem dois tipos de torques que
podem ser diferenciados pelo seu modo de atuação: o primeiro tipo atua no sentido de
propagar e sustentar o movimento e o segundo, atua no sentido de se opor a esta
propagação e sustentação do movimento.
Ao primeiro tipo, que se desenvolve no acionador, denomina-se de torque motriz; ao
segundo, que se desenvolve na máquina acionada, denomina-se torqueresistente.
O movimento do conjunto pode ser uniforme, se a velocidade do eixo do motor for
constante, ou não uniforme, se ela for variável.
O movimento uniforme ocorre, por exemplo, quando a máquina trabalha em regime contínuo
na sua condição nominal. O movimento não uniforme ocorre em condições transitórias, isto é,
durante a partida e aceleração, frenagem ou uma súbita variação da carga.
O torque resistente da máquina é composto de duas parcelas: a primeira, que designa-se
como torque útil, 7X é, o torque que ela desenvolve ao realizar o trabalho para o qual foi
construída; a segunda, é o torque proveniente do atrito entre as partes móveis e fixas da
máquina, que se transforma em perdas, chamado de torque de atrito7RPode-se escrever
então a equação para o torque resistente:
7U 7X 7R
(40)
Quando o movimento é do tipo não uniforme, o torque desenvolvido pelo motor deve
equilibrar, além do torque resistente desenvolvido pela máquina, o torque inercial 7Ldevido à
inércia das massas do conjunto que se põem em movimento.
Este torque é também um torque resistente, pois ele se opõe ao torque desenvolvido pelo
motor tendendo a retardar o movimento, quando o motor está se acelerando, e a mantê-lo,
quando o motor está desacelerando. A sua expressão é :
7L - Onde:
GZ
GW
-é a inércia das massas que estão em movimento rotativo e
(41)
GZ
GW
representa a aceleração
angular. Qualquer que seja a condição operacional do conjunto, os torques presentes durante
a operação devem estar em equilíbrio, isto é, o torque motor é igual à soma de todos os
torques resistentes. Este é o conceito fundamental sobre o qual se fundamenta a teoria do
acionamento. A partir desse conceito pode-se estabelecer a equação do acionamento:
22
^_`ab c def
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
7X 7U
Onde:
7L 7U
-
GZ
GW
(42)
7Xé o torque útil desenvolvido pelo motor, disponível no seu eixo, e -a inércia de todas as
massas em movimento, inclusive a massa do rotor do motor.
A equação (42) parte do pressuposto de que o motor e a máquina acionada giram à mesma
velocidade ou seja, o acoplamento entre o motor e a máquina é um acoplamento direto.
Na realidade, é muito comum a máquina acionada girar a uma velocidade diferente da do
motor. Nesse caso, deve-se considerar um conjunto equivalente.
&RQVLGHUDo}HVEiVLFDVSDUDRDFLRQDPHQWRGHXPDFDUJD
Para o acionamento de uma carga por meio de um motor elétrico deve-se considerar:
•
•
•
•
•
•
•
•
Potência mecânica requerida pela carga;
Velocidade de giro da carga;
Torque resistente a ser acionado;
Inércia da carga;
Tensão disponível no sistema elétrico ao qual será ligado o motor para acionamento da
carga;
Forma e simetria de tensões e correntes do sistema elétrico ao qual será ligado o motor
para acionamento da carga;
Nível de curto circuito do sistema elétrico para elaborar estudo e dimensionar o tipo de
partida do conjunto motor carga;
Regime de serviço a que ficará submetido o conjunto motor carga
5HQGLPHQWRHIDWRUGHSRWrQFLDQRVPRWRUHVHOpWULFRVGHFRUUHQWHDOWHUQDGD
A imensa maioria dos motores de corrente alternada utilizados na atualidade é do tipo de
indução gaiola de esquilo.
A legislação vigente referente a eficiência energética estabelece níveis de alto rendimento
para motores de indução gaiola de esquilo de 2 e 4 pólos até potências de 250 CV, de 6
pólos até potência de 200 CV e de 8 pólos até potencia de 150 CV; com tensão nominal até
600 volts e freqüências de 60 Hz e 50 Hz.
Ainda a legislação vigente estabelece na resolução 456 da ANEEL que o fator de potência de
referência indutivo ou capacitivo terá como limite mínimo permitido para as instalações
elétricas dos consumidores o valor de Os motores de indução que atendem a legislação em vigor quanto ao alto rendimento, em
geral para as distintas faixas de carga apresentam um fator de potencia indutivo inferior ao
estabelecido pela resolução da ANEEL.
Assim necessário se faz fazer a correção do fator de potencia.
Das várias formas existentes pra proceder a esta necessária correção, do ponto de vista
energético visando um melhor rendimento para a instalação elétrica, correção individual em
cada motor é a mais confiável e fácil de manobrar já que utiliza os mesmos equipamentos
que são empregados para o chaveamento do motor:
23
mnopq r stu
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
Figura 24 Instalação de capacitores para
correção de fator de potência .
Fonte: Curso de Mestrado em Regulação da Indústria de Energia -Universidade do Salvador –
UNIFACS
O cálculo da potencia do condensador a ser instalado é:
4 3 . ( WDQ( DFRV ( IS ) )
WDQ( DFRV ( ) ) ) kVAR..........(43)
Onde
3è a potência absorvida do sistema elétrico pelo motor em kW
ISé o fator de potência nominal do motor é o fator de potência do conjunto motor condensador.
É adotado o valor de 0.95 para o conjunto motor condensador tendo em vista as variações do
fator de potência do motor, havidas com as variações de carga.
Um cuidado importante que há de se ter ao adotar este tipo de correção de manobrar o
conjunto motor - condensador com os mesmos equipamentos utilizados para chavear o
motor é que a corrente nominal do condensador deve ser no máximo igual a 90% da corrente
em vazio do motor.
3DUkPHWURVDVHUHPFRQVLGHUDGRVQDHODERUDomRGDHVSHFLILFDomRGHPRWRU
Para elaboração da especificação de motor deve ser considerado:
7RUTXH: A curva de torque do motor deve ser adequada a carga a ser acionada
Verificar caso seja o caso, algumas equivalências de torques normalizados por normas
técnicas estrangeiras, tais como:
Torques equivalentes
ABNT NBR 7094
ANSI/NEMA
N
AeB
H
C
D
D
,QpUFLD A inércia da carga acionada deve estar de acordo com a inércia externa do motor
estabelecido pelas normas técnicas (vide equação 39).Se a inércia da carga estiver em
rotação diferente da do motor como nos acoplamento por polias e/ou engrenagens este
deverá ser referido ao eixo de rotação do motor com a expressão
QF
-UP -F.
em kgm²
QP
(44)
Onde
-UPInércia da carga referida ao eixo do motor
-FInércia da carga
QFRotação da carga em r.p.m
QPRotação nominal do motor em r.p.m
24
mnopq r stu
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
•
7HPSRGH$FHOHUDomRPara verificar o coreto acionamento deve-se calcular o tempo
de aceleração do conjunto motor carga e comparar com o tempo de rotor bloqueado
do motor obtido nos ensaios Este tempo de aceleração é calculado pela expressão
W
-.
Z
7D
GZ em segundos (45)
Onde
WTempo de aceleração do motor em segundos
-Inércia do conjunto motor carga em kgm²
Velocidade angular em radianos por segundo
7DTorque de aceleração do conjunto em Nm
• Ainda há que se considerara na especificação do motor observando as normas
técnicas, local de instalação tipo de manobra da máquina e tipo de carga,:
9 Tensão de alimentação
9 Invólucro
9 Forma construtiva
9 Fator de serviço
9 Classe de isolamento
9 Regime de serviço
9 Temperatura ambiente e altitude
9 Vibração
9 Nível de ruído
9 Proteção por detecção direta de temperatura
9 Ensaios
$VQRUPDVWpFQLFDVSDUDHVSHFLILFDomRGHPRWRUHVHOpWULFRV
A Associação Brasileira de Normas Técnicas - ABNT, tem editado várias normas que dizem
respeito à fabricação e aplicação das máquinas girantes em geral. A seguir essa normas:
NBR-5031-Máquinas elétricas girantes: classificação das formas construtivas e montagens;
NBR-5110- Máquinas elétricas girantes: classificação dos métodos de resfriamento;
NBR-5117- Máquinas síncronas: Especificação;
NBR-5363- Invólucros à prova de explosão para equipamentos elétricos;
NBR-5383 - Máquinas elétricas girantes: determinação das características das máquinas
de indução; Métodos de ensaio;
NBR-5418- Instalações elétricas em ambientes com líquidos, gases ou vapores inflamáveis;
NBR-5432 - Máquinas elétricas girantes: dimensões e potências nominais;
NBR-5453 - Sinais e símbolos literais para eletricidade;
NBR-5457 - Terminologia para máquinas elétricas girantes;
NBR-7034 - Classificação térmica dos materiais isolantes elétricos;
NBR-7094 - Máquinas elétricas girantes: especificação de motores de indução;
NBR-7565 - Máquinas elétricas girantes: limites de ruído;
NBR-7844 - Identificação dos terminais e terminações de equipamentos elétricos;
NBR-9383 - Equipamentos elétricos para atmosferas explosivas;
NBR-9884 - Máquinas elétricas girantes: graus de proteção dados pelos invólucros;
NBR-10350 - Motor de indução de gaiola para uso nava;
NBR-11723-Máquinas elétricas girantes: motores assíncronos trifásicos de anéis para regime
intermitente
Ainda são de utilidade as normas americanas, IEEE Std 112.-“IEEE Standard Test Procedure
for Polyphase Induction Motors and Generators” e “IEEE Std 113.-IEEE Guide: Test
Procedures for Direct-Current Machines”.
([HPSORVGHHVSHFLILFDomRGHPRWRU
Escolha de Motores Elétricos de Indução para acionamento de bomba centrífuga
CV
Potência da Bomba 3 %
+3
vwxyz { |}~
kW
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
25
kW
&9
A.- Motor com tensão de 440 Volts
Potência do Motor da Bomba 3 PD
Fator de potência IS D
KD
Rendimento
Capacitor
4F D
kVAR
Volts
9D
Tensão
CV
kVA/CV
Motor Categoria * D
Horas de funcionamento em um ano +D
horas,
horário fora de ponta.
Potência aparente do conjunto Motor - Capacitor:
3 PD. &9
6D
IS D. K D
M . DFRV IS D
.H
6 D = + M
kVA
4F D. H
S
M .
6 D = kVA
5H 6 D 3 D = kW
4 D ,P 6 D 4 D = kVAR
3D
ID
.
S
I D = DUJ 6 D
graus
Fator de Potência corrigido,
3D
IS FD
6D
IS FD = Corrente do motor a plena carga,
, PD
3 PD. &9 . . 9 D. IS D. K D
, PD = .H
M . DFRV IS D
M
, PD = A
A
Corrente do conjunto motor - condensador a plena carga,
,D
6 D. . 9 D
, D = M
Impedância do Motor,
A
, D = A
9 D . IS D. K D M . DFRV IS D
.H
= PD
3 PD. &9 . = PD = + M
= PD = 5 PD
5H = PD
5 PD = 26
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
; PD
; PD = ,P = PD
Em por unidade ba base de 100 MVA
= PDSX
= PD.
= PDSX = + M
9 D. p.u @ 100 MVA
Impedância do Condensador,
9D
=F D
4F D. S
M .
.H
=F D = M
(PSRUXQLGDGHEDEase de 100 MVA
=F DSX
=F DSX = M
=F D.
9 D. p.u @ 100 MVA
Impedância equivalente Motor - Condensador em operação normal,
=F PD
= PD
9HULILFDoão,
=HF PD
=F D
9D
6 D. =F PD = + M
=HF PD =
+ M
(PSRUXQLGDGHED base de 100 MVA
=HF PDSX
=HF PD.
=HF PDSX = + M
9 D. p.u @ 100 MVA
Comportamento do motor na partida.
Môdulo da potência aparente na partida,
6 SD
3 PD. * D
Fator de potência na partida,
IS SD
3 PD. &9
6 SD
6 SD = kVA
IS SD = Corrente do Motor na partida,
, SD
6 SD. . 9 D
, SD = .H
M . DFRV IS SD
Impedância do Motor na partida,
M
A
, SD = © Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
A
27
9D
= SD
6 SD. L . DFRV IS SD
.H
= SD =
+ L
(PSRUXQLGDGHQDEDVHGH09$
= SDSX
= SDSX = + M
= SD.
9 D. p.u @ 100 MVA
Impedância equivalente Motor - Condensador na partida, em por unidade na base de
100 MVA
=HS DSX
= SDSX
=F DSX
=HS DSX = + M
SX#09$
&DUUHJDPHQWRGR0RWRU
&RPDERPEDIXQFLRQDQGRDSOHQDFDUJDWHPRVTXHRFDUUHJDPHQWRGRPRWor será;
& PD
3%
3 PD
& PD = p.u satisfaz
&DERVDOLPHQWDGRUHVDR0RWRU
. . PP
OF D metros
Bitola dos cabos
Comprimento
Isolamento
Classe isolamento
Resistência do cabo
Reatância do cabo
(35
UF D
(9$
N9
[F D
NP
Ampéres
Capacidade de condução de corrente dos cabos , QFD
trifólio dentro de Eletroduto.
Percentual de condução de corrente de sobrecarga do cabo
, QFD
SVFD
, PD
. SVFD = em
%
Este percentual satisfaz, tendo em vista que com o condensador a corrente que conduzirão
normalmente os cabos será , D = Amperes com o que o percentual de
condução de corrente de sobrecarga do cabo passa para:
, QFD
SVFD
,D
. SVFD = %
Impedância do cabo alimentador,
]F D
OF D . . UF
D
IF D
L . [F D ]F D = + L
]F D = .
S
DUJ ]F D
IF D = graus
Em por unidade na base de 100 MVA
28
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
=F DSX
=F DSX = + M
]F D.
9 D. p.u @ 100 MVA
Queda de tensão no alimentador com o Motor somente em operação,
UF D
. , PD . OF D. .
'9 D
'9 D = . IS
[F D
D
9D
. VLQ DFRV IS
D
. %
Queda de tensão no alimentador com o Conjunto Motor - Condensador em operação,
UF D
. , D . OF D. .
'9 DF
'9 DF = . IS
FD
[F D
. VLQ DFRV IS
FD
. 9D
%
Suportabilidade ao curto circuito,
,FF D
. . .
.
ORJ
,FF D = kA
Energia consumida pelo conjunto Motor - Condensador em um ano:
[ D 3 D. +D [ D = kWh
Perda de Energia anual no Motor :
[ D. S[ PD
S[ PD = KD
kWh
Perda de Energia anual nos cabos de alimentação ao conjunto Motor - Condensador
.
UF D
.
.
. , D . OF D
S[ FD
+D. S[ FD = kWh
Energia consumida pelo funcionamento da instalação conjunto Motor - Condensador
em um ano:
[ LD [ D S[ FD [ LD = kWh
Perda de Energia anual da instalação:
S[ DW S[ PD S[ FD
S[ DW = kWh
Percentual de perdas de energia da instalação:
S[ DW .
S[ DW
[ LD
S[ DW = %
Percentual de perda de energia anual nos cabos de alimentação ao conjunto
Motor - Condensador
S[ FD
S[ FD .
S[ FD = %
[ LD
Perda de Energia anual nos cabos de alimentação ao Motor somente
S[ PFD
.
, PD
.
UF D
.
.
.
OF D
+D. S[ PFD = kWh
29
¡¢
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
Energia consumida pelo funcionamento da instalação do Motor em um ano:
[ LPD [ D S[ PFD [ LPD = kWh
Perda de Energia anual da instalação:
S[ PDW
S[ PD
S[ PDW = S[ PFD
kWh
Percentual de perdas de energia da instalação:
S[ PDW .
S[ PDW
[ LPD
S[ PDW = %
Percentual de perda de energia anual nos cabos de alimentação ao Motor:
S[ PFD.
S[ PFD
[ LPD
B.- Motor com tensão de 4160 Volts
Potência do Motor da Bomba 3 PE
KE
Capacitor
4F E
9E
Tensão
CV
Fator de potência IS E
Rendimento
S[ PFD = %
kVAR
Volts
kVA/CV
Motor Categoria * E
Horas de funcionamento em um ano +D
horas
Potência aparente do conjunto Motor - Capacitor:
3 PE. &9
6E
IS E. K E
M . DFRV IS E
.H
6 E = + M
kVA
4F E. H
S
M .
6 E = 5H 6 E 3 E = kW
4 E ,P 6 E 4 E = kVAR
3E
IE
.
S
DUJ 6 E
I E = kVA
graus
Fator de Potência corrigido,
3E
IS FE
6E
IS FE = Corrente do motor a plena carga,
, PE
3 PE. &9 . . 9 E. IS E. K E
, PE = .H
M
M . DFRV IS E
A
, PE = A
Corrente do conjunto motor - condensador a plena carga,
,E
6 E. . 9 E
30
£¤¥¦§ ¨ ©ª«
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
, E = M
, E = A
Impedância do Motor,
9 E . IS E. K E M . DFRV IS E
.H
3 PE. &9 . = PE
= PE = + M
5 PE
= PE = 5 PE = 5H = PE
,P = PE
; PE
A
; PE = Em por unidade ba base de 100 MVA
= PESX
= PE.
= PESX = + M
9 E. p.u @ 100 MVA
Impedância do Condensador,
=F E
9E
4F E. S
M .
.H
=F E = M
(PSRUXQLGDGHEDEDse de 100 MVA
=F ESX
=F ESX = M
=F E.
9 E. p.u @ 100 MVA
Impedância equivalente Motor - Condensador em operação normal,
=F PE
= PE
=F E
Verificação,
=HF PE
9E
6 E. =F PE = + M
=HF PE =
+ M
(PSRUXQLGDGHEDEDVe de 100 MVA
=HF PESX
=HF PE.
=HF PESX = + M
9 E. p.u @ 100 MVA
Comportamento do motor na partida.
Môdulo da potência aparente na partida,
6 SE
3 PE. * E
Fator de potência na partida,
6 SE = kVA
31
¬­®¯° ± ²³´
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
3 PE. &9
IS SE
IS SE = 6 SE
Corrente do Motor na partida,
6 SE. , SE
. 9 E
M . DFRV IS SE
.H
, SE = M
, SE = A
Impedância do Motor na partida,
= SE
9E
6 SE. .H
L . DFRV IS SE
= SE =
+ M
(PSRUXQLGDGHQDEDVHGH09$
= SESX
= SE.
= SESX = + M
A
9 E. p.u @ 100 MVA
Impedância equivalente Motor - Condensador na partida, em por unidade na base de
100 MVA
=HS ESX
= SESX
=F ESX
=HS ESX = + M
SX#09$
&DUUHJDPHQWRGR0RWRU
&RPDERPEDIXQFLRQDQGRDSOHQDFDUJDWHPRVTXHRFDUUHJDPHQWRGRPRWRUVHUá;
& PE
3%
3 PE
& PE = p.u satisfaz
&DERVDOLPHQWDGRUHVDR0RWRU
. PP
OF E metros
Bitola dos cabos
Comprimento
Isolamento
Classe isolamento
Resistência do cabo
Reatância do cabo
(35
UF E
[F E
(9$
N9
NP
NP
Ampéres
Capacidade de condução de corrente dos cabos , QFE
em trifólio dentro de Eletroduto.
Percentual de condução de corrente de sobrecarga do cabo
SVFE
, QFE
, PE
. SVFE = %
Este percentual satisfaz, tendo em vista que com o condensador a corrente que
conduzirão normalmente os cabos será , E = Amperes com o que o percentual
de condução de corrente de sobrecarga do cabo passa para
SVFE
µ¶·¸¹ º »¼½
, QFE
,E
. SVFE = %
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
32
Impedância do cabo alimentador,
OF E
]F E
]F E = .
IF E
L . [F E ]F E = + M
. UF
E
S
IF E = DUJ ]F E
Em por unidade na base de 100 MVA
=F ESX
]F E.
=F ESX = + M
graus
9 E. p.u @ 100 MVA
Queda de tensão no alimentador com o Motor somente em operação,
UF E
. , PE . OF E.
'9 E
'9 E = . IS
E
[F E
. VLQ DFRV IS
E
. 9E
%
Queda de tensão no alimentador com o Conjunto Motor - Condensador em operação,
'9 EF
UF E
. , E . OF E.
'9 EF = . IS
FE
[F E
. VLQ DFRV IS
FE
. 9E
%
Suportabilidade ao curto circuito,
,FF E
. .
.
ORJ
,FF E = kA
Energia consumida pelo conjunto Motor - Condensador em um ano:
[ E 3 E. +D [ E = kWh
Perda de Energia anual no Motor :
S[ PE
[ E. KE
S[ PE = kWh
Perda de Energia anual nos cabos de alimentação ao conjunto Motor - Condensador
S[ FE
UF E
. +D. . , E . OF E.
S[ FE = kWh
Energia consumida pelo funcionamento da instalação do conjunto Motor - Condensador em
um ano:
[ LE [ E S[ FE [ LE = kWh
Perda de Energia anual da instalação:
S[ EW S[ PE S[ FE
S[ EW = kWh
Percentual de perdas de energia da instalação:
S[ EW
S[ EW .
[ LE
S[ EW = %
Percentual de perda de energia anual nos cabos de alimentação ao conjunto
Motor - Condensador
33
¾¿ÀÁ à ÄÅÆ
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
S[ FE .
S[ FE
[ LE
S[ FE = %
Perda de Energia anual nos cabos de alimentação ao Motor somente
S[ PFE
.
, PE
UF E
.
. +D. OF E.
S[ PFE = kWh
Energia consumida pelo funcionamento da instalação do Motor em um ano:
[ LPE [ E S[ PFE [ LPE = kWh
Perda de Energia anual da instalação:
S[ PEW
S[ PE
S[ PEW = S[ PFE
kWh
Percentual de perdas de energia da instalação:
S[ PEW
S[ PEW .
[ LPE
S[ PEW = %
Percentual de perda de energia anual nos cabos de alimentação ao Motor:
S[ PFE
S[ PFE.
[ LPE
S[ PFE = %
O valor médio da Energia elétrica para o setor industrial na região nodeste é,
7[
R$/kWh
assim o custo anual da energia com a alternativa A, motor suprido em 440 volts seria:
4 D [ LD . 7[
4 D = Reais,
e o valor anual das perdas totais é.
4SWD = Reais,
e o valor anual das perdas nos cabos alimentadores é.
4FD S[ FD. 7[
4FD = Reais quando da operação do
Conjunto Motor- Condensador e,
4PFD S[ PFD. 7[
4PFD = Reais quando da operação do
motor de acionamento ad Bomba somente.
4SWD
S[ DW. 7[
Na alternativa B, com o motor suprido em 4160 volts o custo anual da energia seria:
4 E [ LE . 7[
4 E = Reais,
e o valor anual das perdas totais é.
4SWE
S[ EW . 7[
4SWE = Reais,
e o valor anual das perdas nos cabos alimentadores é.
4FE S[ FE. 7[
4FE = Reais quando da operação do Conjunto
Motor- Condensador e,
4PFE S[ PFE. 7[
4PFE = Reais quando da operação do
motor de acionamento ad Bomba somente.
Verifica-se que a operação mais adequada dos pontos de vista energético e
econômico é a alternativa B com motor suprido em 4160 volts e corrigindo o fator de
potência do mesmo com condensador de 200 kVAR.
&RQFOXV}HVHUHFRPHQGDo}HV
Este dossiê não tem nem a mínima pretensão de esgotar um estudo bastante extenso como
é o acionamento motriz elétrico de cargas.
Esta introdução pretende somente pontuar alguns itens de importância principalmente no que
se refere aos motores mais utilizados na atualidade como são os motores de indução gaiola
de esquilo.
34
ÇÈÉÊË Ì ÍÎÏ
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
Numa necessária complementação, há necessidade de ilustrar o dimensionamento motriz
para cargas como compressores, ventiladores moinhos transportadores elevadores etc.
sempre mantendo o enfoque da eficiência energética.
5HIHUrQFLDV
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS
ALGERPHILIP L. Induction Machines. Their Behavior and Uses.
AMÉRICO,MÁRCIO .Apontamentos de motores.
CEPEL Guia operacional de motores elétricos
CHARLES I. HUBERT -Electric Machines, Theory, Operation, Aplications Adjustament, and
Control.
FITZGERALD , A.E., C. Kingsley Jr, A. Kusko, Máquinas Elétricas,
GEORGE Mc. PHERSON An Introduction to Electrical Machines and Transformers.
IEEE The Institute of Electrical and Electronics Engineers, Inc
LEANDER W. MATSCH - Eletromagnetic and Eletromechamical Machines
MICHAEL LIWSCHITZ-GARIK and CLYDE C. WHIPPLE - Máquinas de Corrente Contínua
Vol I e Máquinas de Corrente Alternada Vol II
KOSTENKO, M. e L. PIOTROVSKY - Máquinas Elétricas Vol I e II
STEPHEN J. CHAPMAN - Electric Machinery Fundamentals
VINCENT DEL TORO - Fundamentos de Máquinas Elétricas
$QH[RV
0RGHOR)ROKDGHGDGRVGHHVSHFLILFDomRPRWRUGH,QGXomR
ESPECIFICAÇÕES GERAIS
01
MOTOR Nº
02
DADOS DO FABRICANTE
34
CORRENTE DE MAGNETIZAÇÃO
MÁQUINA ACIONADA
35
FABRICANTE
03
TIPO.
36
SÉRIE DO MOTOR Nº
04
CARCAÇA:
NEMA
[
]
IEC
[
]
ABNT
[
37
Nº
]
ANO DE FABRICAÇÃO
39
MODELO
05
PÊSO
06
MOMENTO MÁX. SOBRE A BASE
07
POTÊNCIA NOMINAL NO EIXO:
08
TENSÃO:.
41
TIPO DE MONTAGEM.
09
NÚMERO DE FASES.
42
INSTALAÇÃO
10
FREQUÊNCIA.
43
TEMPERATURA
11
NÚMERO DE POLOS.
44
12
ROTAÇÃO
13
REGIME DE SERVIÇO:
14
FATOR DE SERVIÇO:.
15
CICLO DE SERVIÇO.
16
PARTIDAS POR HORA.
17
CLASSE DE ISOLAMENTO:
A [
TIPO DE LIGAÇÃO:
DELTA [
18
SÉRIE PARALELO
kgf
LOCAL DE FABRICAÇÃO
38
A
[
40
kgm²
HP,
CV,
PLENA
CONTÍNUO [
kW
CARGA
]
DADOS PARA INSTALAÇÃO
.
INTERMITENTE [
DESENHO DE REFERÊNCIA
45
]
ABRIGADA
AO TEMPO [
ALTITUTE.
<
CLASSIFICAÇÃO DO LOCAL
M
DIRETO [
]
P/ POLIAS[
47
]
C/ REDUTOR[
]
]
INSTRUÇÕES DE ACOPLAMENTO
E [
]
a) FORNECIMENTO FABRICANTE DO MOTOR:
ESTRELA [
]
MEIO ACOP. [
]
]
AMBIENTE.
EIXO INTERMEDIÁRIO [
]
]
TIPO DE ACOPLAMENTO À MÁQUINA ACIONADA:
46
]B [
[
]
ACOP. [
]
GABARITO
[
b) FORNECIMENTO FABRICANTE EQUIPAMENTO ACIONADO
]
35
ÐÑÒÓÔ Õ Ö×Ø
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
19
20
21
MEIO ACOP. [
MÉTODO DE PARTIDA:
CURVA CONJUGADO X VELOCIDADE.
SEGUNDO NORMA:.
HORÁRIO [
AMBOS [ X ]
] ANTIHORÁRIO [
]
48
OLHANDO-SE P/ LADO DO ACOPLAMENTO
CORRENTE COM ROTOR TRAVADO.
23
LETRA DO CÓDIGO NEC:
Cós
49
ϕ
RENDIMENTO
SOBRE CARGA
CONJUGADO
DE
ROTOR
TRAVADO
CONJUGADO
51
MÁXIMO
CONJUGADO
CONJUGADO
PLENA
CARGA
CARGA
53
ELEVAÇÃO DE TEMPERATURA NO ROTOR A PLENA
]
NÃO [
]
TENSÃO
,
FASE
PROTEÇÃO CONTRA SURTOS
] NÃO [
SIM [
]
]NÃO [
TIPO
]
APRESENTAR CERTIFICADOS DE ENSAIOS EM PROTÓTIPO
SIM [ X
]
NÃO [
]
NORMA DE EXECUÇÃO DOS ENSAIOS:
O FABRICANTE DEVERÁ REALIZAR TODOS OS ENSAIOS
OPERAÇÃO.
DO
MOTOR:.
b) PARTES GIRANTES DA MÁQ. ACIONADA:
kgm²
c) VOLANTE DA MÁQ. ACIONADA
kgm²
54
55
DE ROTINA, E APRESENTAR CERTIFICADOS ORIGINAIS
kgm²
NORMA DE EXECUÇÃO DOS ENSAIOS:
OBSERVAÇÕES
56
EFEITO VOLANTE (GD²)
- ROTOR DO MOTOR
57
O FABRICANTE DEVERÁ PREENCHER TODOS OS ESPAÇOS
BRANCO DESTA FOLHA DE DADOS
OS MOTORES TERÃO PLACA DE IDENTIFICAÇÃO SEGUNDO
TEMPO PERMITIDO PARA ACELERAÇÃO COM CARGA DE
NORMA:
MOMENTO DE INÉRCIA IGUAL A
FORNECER:
% DO MOMENTO
DE INÉRCIA DO ROTOR DO MOTOR
33
t
:
COM RESULTADO DOS MESMOS
ROTOR
NOMINAL,
]
ENSAIOS DE ROTINA
ºC
TEMPO ADMISSÍVEL DE ROTOR TRAVADO PARTINDO DA
TEMPERATURA
DE
]
] NÃO[
ENSAIOS
52
PLENA
]
] NÃO[
CLASSE PRECISÃO
MÍNIMO
DE
ELEVAÇÃO DE TEMPERATURA NO ENROLAMENTO DO ESTATOR
a)
[
RELAÇÃO
%
MOMENTO DE INÉRCIA (J):
32
[
DIFERENCIAL AUTO BALANCEADA
CARGA
31
[
½ CARGA
A
30
SIM
TRANSFORMADORES DE CORRENTE PARA PROTEÇÃO
Nm
29
NÃO[
[
SIM
SIM [
c)
28
]
¾ CARGA
d)
GABARITO
RESISTÊNCIAS AQUECEDORAS DE DESUMIDIFICAÇÃO
SIM
50
b)
27
]
PLENA CARGA
a)
26
a) NOS ENROLAMENTOS: SIM [
b) NO NÚCLEO:
c) NOS MANCAIS:
CORRENTE
25
ACOP. [
DETETORES DE TEMPERATURA
SENTIDO DE ROTAÇÃO:
22
24
]
ACESSÓRIOS
FREQUÊNCIA
E
a) CURVA CONJUGADO X VELOCIDADE:
% DA TENSÃO
PERDAS
INDICADAS,
Ta
58
TEMPO EM QUE É ATINGIDA A TEMP. MÁXIMA DE ROTOR
TRAVADO, Ts
SIM [
b) CURVA % IP/IN X VELOCIDADE:
Seg
TEMPO DE CIRCUITO ABERTO,
]
NÃO [
SIM [
]
]
NÃO
c) CIRCUITO EQUIVALENTE COM INDIÇÃO DOS PARÂMETROS DO
MOTOR:
SIM [
]
NÃO [
]
d) FATORES DE VARIAÇÃO DE RESISTÊNCIA E DE REATÂNCIA
To
Seg
COM O ESCORREGAMENTO:
SIM [ x ] NÃO [
]
1RPHGRWpFQLFRUHVSRQViYHO
Gustavo Paez.
1RPHGD,QVWLWXLomRGR6%57UHVSRQViYHO
Rede de Tecnologia da Bahia – RETEC/BA
'DWDGHILQDOL]DomR
21 abril 2007
36
ÐÑÒÓÔ Õ Ö×Ø
© Serviço Brasileiro de Respostas Técnicas - SBRT - http://www.sbrt.ibict.br
[