CENTRO UNIVERSITÁRIO DE BRASÍLIA - UNICEUB
FACULDADE DE CIÊNCIAS EXATAS E TECNOLOGIA – FAET
CURSO: ENGENHARIA DE COMPUTAÇÃO
DISCIPLINA: MONOGRAFIA ACADÊMICA
PROFESSOR ORIENTADOR: ADERLON MARCELINO QUEIROZ
CONTROLE REMOTO INFRAVERMELHO PARA
AUTOMAÇÃO
RAFAEL RIBEIRO REZENDE LOMBARDI
REGISTRO ACADÊMICO: 2012652/1
Brasília/DF, Julho de 2006
CENTRO UNIVERSITÁRIO DE BRASÍLIA - UNICEUB
FACULDADE DE CIÊNCIAS EXATAS E TECNOLOGIA – FAET
CURSO: ENGENHARIA DE COMPUTAÇÃO
DISCIPLINA: MONOGRAFIA ACADÊMICA
PROFESSOR ORIENTADOR: ADERLON MARCELINO QUEIROZ
CONTROLE REMOTO INFRAVERMELHO PARA
AUTOMAÇÃO
RAFAEL RIBEIRO REZENDE LOMBARDI
REGISTRO ACADÊMICO: 2012652/1
Monografia apresentada como requisito para conclusão
do curso de Engenharia de Computação no UniCEUB –
Centro Universitário de Brasília.
Brasília/DF, Julho de 2006
II
CENTRO UNIVERSITÁRIO DE BRASÍLIA - UNICEUB
FACULDADE DE CIÊNCIAS EXATAS E TECNOLOGIA – FAET
CURSO: ENGENHARIA DE COMPUTAÇÃO
SUPERVISÃO DE MONOGRAFIA ACADÊMICA
MEMBROS DA BANCA EXAMINADORA
3.2.1.
MEMBROS DA BANCA
ASSINATURA
1. PROFESSOR(ª) ORIENTADOR(ª)
Prof. (ª): MC Aderlon Marcelino Queiroz
2. PROFESSOR(ª) CONVIDADO(ª)
Prof(ª).: MC Maria Marony Souza Farias Nascimento
3. PROFESSOR(ª) CONVIDADO(ª)
Prof(ª).: MC José Julimá Bezerra Júnior
MENÇÃO FINAL::
Brasília/DF, 07 de Julho de 2006.
III
DEDICATÓRIA
À Jesus,
Por sempre estar ao meu lado, me
guiando em cada passo na minha vida.
À Minha família,
Que me deu a base necessária para a
formação
da
independência
minha
e
personalidade,
educação,
me
incentivando sempre a lutar pelos meus
objetivos e ter um ideal de vida.
IV
AGRADECIMENTOS
À Deus,
Agradeço primeiramente a Jesus por
tudo o que tem feito na minha vida, me
guiando e iluminando em todos os
momentos para que eu possa tomar
decisões corretas.
À Família,
Meus pais, Hélio e Eliane e meu
irmão Thiago por sempre estarem ao meu
lado durante todo o tempo e por me
permitirem o direito de completar meus
estudos, sempre desejando o melhor tanto
para mim como para meu irmão.
À Mariana,
Minha namorada, que esteve ao meu
lado em momentos muito importantes e
marcantes da minha vida, me trazendo
sempre grande alegria com sua presença.
Ao Aderlon,
Meu professor orientador que me
ajudou
muito
monografia,
na
sempre
elaboração
corrigindo
da
e
propondo melhorias para o projeto.
Aos meus amigos do peito, que
caminharam
juntos
nessa
jornada
maravilhosa de aprendizagem, dos quais
sempre me lembrarei dos grupos de
V
estudo, futebol, churrascos, festas e
demais momentos que passamos.
VI
"O único homem que está isento de
erros, é aquele que não arrisca acertar."
(Albert Einstein)
"Viver é a coisa mais rara do mundo. A
maioria das pessoas apenas existe." (Oscar
Wilde)
"Diante da vastidão do tempo e da
imensidão do espaço é uma alegria para
mim compartilhar uma época e um planeta
com você." (Carl Sagan)
VII
RESUMO
Controle Remoto Infravermelho para Automação é um projeto que tem como
objetivo automatizar algumas atividades cotidianas com o uso do controle remoto. O
principal objetivo é montar um circuito infravermelho de baixo custo que possa ser
manipulado pelos mais variados tipos e marcas de controle remoto.
Este trabalho consiste em um estudo sobre processos e conceitos necessários
para a implementação do circuito infravermelho, conectado através da porta serial ao
computador. A execução de tarefas através do processamento desse computador foi feita na
medida em que os sinais do controle remoto são decodificados pelo software livre LIRC
(Linux Infrared Remote Control, Controle Remoto Infravermelho Linux). Tais aplicações
incluem o controle do cursor do mouse remotamente; Envio de combinações de teclas a
qualquer programa e a execução desses a partir de um botão pré-programado; Acender e
apagar uma lâmpada, usando a porta paralela do computador.
O projeto descreve a montagem de um segundo circuito conectado à porta
paralela do computador que irá receber sinais dos pinos de dados para ativar ou desativar o
circuito conectado à lâmpada. Dessa forma, através de um simples botão do controle
remoto será possível acender e apagar lâmpadas.
Palavras-chave: Infravermelho, Automação, Controle remoto.
VIII
ABSTRACT
The objective of Infrared Remote Control for Automation project is to automate
some common tasks of day with a remote control. The main purpose is to build a cheap
infrared circuit that can be manipulated by the most common kinds and brands of remote
controls.
It consists of a study on processes and concepts for the implementation of the
infrared circuit connected to a personal computer by the serial port. The execution of tasks
will be made by the computer after the signals of remote control be decoded by the free
software LIRC (Linux Infrared Remote Control). Some of the applications are the control
of the mouse movements remotely; Executing programs just by one button press; Turn on
and off a lamp connected to a parallel port circuit.
The project foresees the build of a second circuit that will be connected to
computer parallel port. This circuit will receive signals from data pins to activate or
deactivate a circuit connect to the relay coil that is directly connected to the lamp. In this
way, with just a button press it will be possible to turn on and turn off lamps.
Keywords: Infrared, Automation, Remote control.
IX
SUMÁRIO
ÍNDICE DE FIGURAS ................................................................................................................................ XII
ÍNDICE DE TABELAS...............................................................................................................................XIII
ÍNDICE DE TABELAS...............................................................................................................................XIII
ÍNDICE DE EQUAÇÕES ...........................................................................................................................XIV
LISTA DE SIGLAS E NOMENCLATURAS............................................................................................. XV
LISTA DE SIGLAS E NOMENCLATURAS............................................................................................. XV
1.
INTRODUÇÃO ....................................................................................................................................... 1
1.1.
1.1.
2.
INFRAVERMELHO .............................................................................................................................. 5
2.1.
2.2.
2.3.
2.4.
3.
MOTIVAÇÃO ..................................................................................................................................... 3
OBJETIVOS........................................................................................................................................ 3
CONCEITOS INICIAIS ......................................................................................................................... 5
INFRAVERMELHO WIRELESS ............................................................................................................. 9
CARACTERÍSTICAS ............................................................................................................................ 9
DETECÇÃO E NEP........................................................................................................................... 10
CIRCUITO INFRAVERMELHO ....................................................................................................... 13
3.1.
PADRÃO RS-232............................................................................................................................. 13
3.2.
CIRCUITO/HARDWARE.................................................................................................................... 19
3.2.1. Características TSOP 1738 ...................................................................................................... 23
3.2.2. Funcionamento ......................................................................................................................... 24
4.
AUTOMAÇÃO...................................................................................................................................... 27
4.1.
4.2.
4.3.
4.4.
4.5.
4.6.
APLICAÇÕES .................................................................................................................................. 27
CURSOR DO MOUSE ....................................................................................................................... 27
INTERFACE PARALELA ................................................................................................................. 28
CIRCUITO LED .............................................................................................................................. 32
CIRCUITO LÂMPADA ..................................................................................................................... 34
FLUXOGRAMA ............................................................................................................................... 37
.......................................................................................................................................................................... 37
5.
LIRC – LINUX INFRARED REMOTE CONTROL ........................................................................ 38
5.1.
INSTALAÇÃO DO PACOTE LIRC ................................................................................................... 39
5.1.1. Dependências ........................................................................................................................... 39
5.1.2. Instalação ................................................................................................................................. 41
5.1.3. Teste.......................................................................................................................................... 49
5.1.4. Programas LIRC ...................................................................................................................... 50
5.1.5. Diagrama de blocos.................................................................................................................. 52
6.
CONSIDERAÇÕES FINAIS................................................................................................................ 54
6.1.
6.2.
6.3.
CONCLUSÃO .................................................................................................................................. 54
DIFICULDADES .............................................................................................................................. 54
SUGESTÕES PARA TRABALHOS FUTUROS .................................................................................... 56
REFERÊNCIAS BIBLIOGRÁFICAS .......................................................................................................... 57
7.
APÊNDICES.......................................................................................................................................... 59
X
7.1.
FORMATO ...................................................................................................................................... 59
APÊNDICE A.................................................................................................................................................. 60
7.1.1.
LIRCD.CONF ........................................................................................................................... 60
APÊNDICE B.................................................................................................................................................. 64
7.1.2.
LIRCMD.................................................................................................................................... 64
APÊNDICE C.................................................................................................................................................. 68
7.1.3.
.LIRCRC.................................................................................................................................... 68
APÊNDICE D.................................................................................................................................................. 72
7.1.4.
LPT_COMPLETO..................................................................................................................... 72
APÊNDICE E.................................................................................................................................................. 73
7.1.5.
ESQUEMA ELÉTRICO CIRCUITO INFRAVERMELHO ........................................................ 73
APÊNDICE F .................................................................................................................................................. 74
7.1.6.
ESQUEMA ELÉTRICO CIRCUITO LÂMPADA ...................................................................... 74
XI
Índice de Figuras
FIGURA 2.1: ESPECTRO ELETROMAGNÉTICO ........................................................................................................ 6
FIGURA 2.2: FORMAS DE TRANSMISSÃO DO INFRAVERMELHO ............................................................................. 8
FIGURA 3.1: PINOS DA INTERFACE SERIAL RS-232 ............................................................................................ 15
FIGURA 3.2: PINOS CONECTOR RS-232.............................................................................................................. 15
FIGURA 3.3: PINOS USADOS NO PROJETO ........................................................................................................... 17
FIGURA 3.4: CONEXÕES FÍSICAS DO CIRCUITO RECEPTOR INFRAVERMELHO ...................................................... 20
FIGURA 3.5: ILUSTRAÇÃO DAS CONEXÕES ENTRE OS COMPONENTES ................................................................. 20
FIGURA 3.6: PINOS DO REGULADOR DE TENSÃO 78L05 ..................................................................................... 21
FIGURA 3.7: PINOS DO RECEPTOR TSOP 1738 ................................................................................................... 22
FIGURA 3.8: REPRESENTAÇÃO DAS CONEXÕES EM UMA MATRIZ 5X5 ................................................................ 25
FIGURA 3.9: FOTO DO CIRCUITO MONTADO NO PROTOBOARD............................................................................ 26
FIGURA 4.1: PINOS DA INTERFACE PARALELA RS-232....................................................................................... 29
FIGURA 4.2: TRANSISTORES EM SÉRIE ORIGINANDO CORRENTE ......................................................................... 31
FIGURA 4.3: TRANSISTORES EM SÉRIE DISSIPANDO CORRENTE .......................................................................... 31
FIGURA 4.4: POLARIZAÇÃO DO LED ................................................................................................................... 32
FIGURA 4.5: LED................................................................................................................................................ 32
FIGURA 4.6: ESQUEMA DE CONEXÃO DA PORTA PARALELA AOS LEDS ............................................................... 33
FIGURA 4.7: ESQUEMA DE MONTAGEM DO CIRCUITO PARA AUTOMAÇÃO LÂMPADA.......................................... 35
FIGURA 4.8: ESQUEMA COM A MESMA FUNCIONALIDADE DO CIRCUITO ABORDADO ANTERIORMENTE .............. 36
FIGURA 4.9: FLUXOGRAMA ............................................................................................................................... 37
FIGURA 5.1: CONFIGURAÇÃO DO KERNEL ......................................................................................................... 40
FIGURA 5.2: CONFIGURAÇÃO DO KERNEL ......................................................................................................... 41
FIGURA 5.3: SCRIPT DE CONFIGURAÇÃO LIRC .................................................................................................. 42
FIGURA 5.4: CONFIGURAÇÃO DO DRIVER .......................................................................................................... 43
FIGURA 5.5: CONFIGURAÇÃO DO DRIVER .......................................................................................................... 43
FIGURA 5.6: CONFIGURAÇÃO DE ENDEREÇO ENTRADA/SAÍDA E INTERRUPÇÃO ................................................ 44
FIGURA 5.7: OPÇÃO PARA TRABALHAR APENAS COM O MÓDULO RECEPTOR ..................................................... 44
FIGURA 5.8: CONFIGURAÇÃO DO LIRC............................................................................................................... 45
FIGURA 5.9: COMPILAÇÃO E INSTALAÇÃO DO LIRC ........................................................................................... 46
FIGURA 5.10: ALTERAÇÃO DE PERMISSÃO ......................................................................................................... 47
FIGURA 5.11: ESPECIFICAÇÃO DO DRIVER E ENDEREÇAMENTO ......................................................................... 48
FIGURA 5.12: ESPECIFICAÇÃO DO DIRETÓRIO DAS BIBLIOTECAS ....................................................................... 49
FIGURA 5.13: DIAGRAMA DE BLOCOS LIRC ...................................................................................................... 52
FIGURA 7.1: ESQUEMA ELÉTRICO CIRCUITO INFRAVERMELHO........................................................................... 73
FIGURA 7.2: ESQUEMA ELÉTRICO CIRCUITO LÂMPADA ...................................................................................... 74
XII
Índice de Tabelas
TABELA 2.1: SUBDIVISÕES DO INFRAVERMELHO ................................................................................................. 7
TABELA 3.1: RELAÇÃO DE PINOS E FUNÇÕES DO PADRÃO RS-232..................................................................... 18
TABELA 4.1: RELAÇÃO DOS PINOS E BITS REFERENTES ...................................................................................... 33
XIII
Índice de Equações
EQUAÇÃO 2.1: NEP
EQUAÇÃO 2.2: DETECTIVIDADE ESPECTRAL
EQUAÇÃO 2.3: DETECTIVIDADE ESPECÍFICA
EQUAÇÃO 2.4: RESPONSITIVIDADE
11
11
12
12
XIV
Lista de Siglas e Nomenclaturas
C
- Common, Comum
CMOS
- Complementary Metal-Oxide Semiconductor, Semicondutor de MetalÓxido Complementar
CTS
- Clear to Send, Livre para enviar
D
- Detectividade Espectral
D*
- Detectividade Específica
DCD
- Data Carrier Detect, Detector de Portadora de Dados
DCE
- Data Communication Equipment, Equipamento de Comunicação de
Dados
DSR
- Data Set Ready, Dados Prontos
DTE
- Data Terminal Equipment, Equipamento Terminal de Dados
DTR
- Data Terminal Ready, Terminal de dados Pronto
FIR
- Far Infrared, Infravermelho Distante
GND
- Ground, Terra
GNU
- General Public License, Licença Pública Geral
I/O
- Input/Output, Entrada/Saída
IRDA
- The Infrared Data Association, Associação de Dados Infravermelho
IRQ
- Interrupt Request, Requisição de Interrupção
ISA
- Industry Standard Architecture, Arquitetura Padrão de Indústria
LIRC
- Linux Infrared Remote Control, Controle Remoto Infravermelho Linux
MIR
- Medium Infrared, Infravermelho Médio
XV
NC
- Normally Closed, Normalmente Fechado
NEP
- Noise Equivalent Power, Potência Equivalente ao Ruído
NIR
- Near Infrared, Infravermelho Próximo
NO
- Normally Open, Normalmente Aberto
PCI
-
Peripheral
Component
Interconnect,
Componente
Periférico
de
Interconexão
PCM
- Pulse Codification Modulation, Modulação por Codificação de Pulso
PDA
- Personal Digital Assistants, Assitência Digital Pessoal
R
- Responsitividade
RTS
- Request to send, Pedido para enviar
RxD
- Received Data, Receptor de dados
TTL
- Transistor-Transistor Logic, Lógica Transistor-Transistor
TxD
- Transmitted Data, Transmissor de dados
UART
- Universal Asynchronous Receiver Transmitter, Receptor e Transmissor
Assíncrono Universal
XIR
- Extreme Infrared, Infravermelho Extremo
XVI
1.
INTRODUÇÃO
Este trabalho descreve como montar um circuito infravermelho de baixo custo
para facilitar e automatizar tarefas cotidianas.
Foram abordados conceitos sobre o funcionamento da tecnologia infravermelha
bem como todo o processo de montagem do circuito, programação e aprendizagem do
controle remoto além da customização do kernel do sistema operacional para a acoplagem
do circuito.
A aplicação prática de diversas matérias cursadas durante a faculdade foi de
fundamental importância durante a implementação do protejo. Certas habilidades como a
montagem de circuitos, soldagem em placas integradas foram aprimoradas durante esse
período.
O estudo durante todo o projeto, buscou sempre melhorar os resultados obtidos
durante a execução de testes e implementar novidades. Além disso, várias dificuldades
foram encontradas durante a implementação. Essas dificuldades são descritas sucintamente
nas considerações finais da monografia. Essas dificuldades serviram para enriquecer o
trabalho e descobrir realmente a causa dos problemas.
O projeto tem um forte embasamento teórico e busca fornecer os passos
necessários para a implementação do circuito receptor, mostrando algumas das possíveis
aplicações que podem ser desenvolvidas.
A monografia começa apresentando a teoria do infravermelho e seus conceitos
fundamentais. Logo em seguida foram descritos o funcionamento das portas seriais e
1
paralelas, necessárias para o funcionamento dos circuitos receptor infravermelho e da
aplicação que tem como função acender e apagar uma lâmpada através do controle remoto.
No capítulo três é enfatizado a parte de montagem do circuito receptor
propriamente dito. Nessa fase são descritos os componentes utilizados bem como o
funcionamento desse hardware através do software livre LIRC.
No capítulo quatro iniciou-se a fase de testes e as aplicações abordadas nessa
monografia. A primeira a ser descrita é a possibilidade de controlar o cursor e ações do
mouse pelo controle remoto, seguida pela execução de programas e o agendamento de
scripts. Para finalizar, são apresentadas as soluções para a parte de automação com a
montagem de um circuito capaz de acender e apagar uma lâmpada através de um botão do
controle remoto.
Já no capítulo cinco vem a descrição e o modo de instalação do software livre
LIRC que faz a decodificação dos sinais recebidos pelo controle remoto. Neste capítulo
ainda são descritos alguns dos principais programas do pacote LIRC.
Por fim, são descritas algumas propostas para a continuação desse projeto. Além
disso, na seção apêndices existem informações técnicas adicionais como códigos fontes de
programas e arquivos de configuração do software LIRC.
2
1.1.
MOTIVAÇÃO
Neste projeto é apresentada uma proposta para controle e automação utilizando
para isso um controle remoto infravermelho universal. Os principais fatores que motivaram
a realização deste trabalho são os seguintes:
• O controle de diversas aplicações sem a utilização de uma conexão por fios,
permitindo uma maior mobilidade.
• Utilização de plataforma com código livre licenciado pela GNU (General
Public License, Licença Pública Geral).
• O custo-benefício do projeto, já que os componentes utilizados na montagem
do circuito são baratos em relação a gama de aplicações que podem ser desenvolvidas.
• Consolidação dos conceitos adquiridos durante o curso de engenharia, como
a montagem de circuitos.
1.1.
OBJETIVOS
Este trabalho tem como principais objetivos:
1. O funcionamento do circuito infravermelho e sua integração com o software
livre LIRC. O circuito infravermelho captura os pulsos enviados pelo controle remoto
enviando-os para o computador através da interface serial. O software LIRC decodifica
esses pulsos, transformando-os em sinais válidos para que o computador possa processá-los
e apresentá-los em tempo real. Para que isso fosse possível foi necessário o teste de
hardware e software isoladamente.
3
2. Um segundo objetivo a ser alcançado é o funcionamento de algumas
aplicações isoladas do mundo externo, ou seja, que dependa somente do circuito receptor
montado e de aplicações existentes no servidor em questão. Tais aplicações são, por
exemplo, o controle do cursor do mouse e consequentemente a possibilidade da
apresentação de slides remotamente. A execução e manipulação de programas existentes, a
execução de scripts e agendar atividades.
3. O último objetivo é com relação a aplicações conectadas ao mundo externo.
Poderíamos citar inúmeras aplicações, mas o foco está voltado para o controle de uma
lâmpada. Dessa forma, foi possível ao final da implantação do projeto controlar esse
dispositivo através do controle remoto. Esse mesmo tipo de circuito pode ser usado como
exemplo para diversos tipos de aplicações envolvendo eletroeletrônica.
4
2.
2.1.
INFRAVERMELHO
CONCEITOS INICIAIS
O astrônomo William Herschel descobriu o infravermelho em 1800. William,
sabendo que a luz solar continha todas as cores do espectro eletromagnético, queria saber
qual cor era responsável pelo aquecimento dos objetos. Dessa forma, Herschel idealizou um
experimento usando um prisma, papelão e termômetros com bulbos pretos, medindo as
temperaturas de diferentes cores. Assim, concluiu que a temperatura mais elevada ocorria
além da luz vermelha e que não era visível ao olho humano. Na época, chamou essa
radiação invisível de “raios caloríficos” o que hoje é chamado de radiação infravermelha.
“A radiação infravermelha, está localizada abaixo (por isso o termo “infra”) da
faixa do vermelho na luz visível e acima de ondas de rádio no espectro eletromagnético”. 1
Energia infravermelha é uma luz invisível, pois seu comprimento de onda é
muito longo para ser detectado pelo olho. Assim sendo, é a parte do espectro
eletromagnético percebido como calor. Todos os objetos com temperatura acima de zero
absoluta emitem calor, portanto podem ser detectados através da tecnologia infravermelha.
A radiação infravermelha provoca vibração de átomos ou grupos de átomos em
um composto. Estas vibrações podem ter amplitudes e velocidades diferentes, ocorrendo
em torno das ligações covalentes que une os átomos, ou grupos de átomos.
A radiação visível corresponde a uma estreita faixa do espectro eletromagnético.
Para cada cor do espectro, está associado um comprimento de onda. Os comprimentos de
1
Vanzetti Riccardo. Practical Applications of Infrared Techniques. New York: John Wiley & Sons, Inc.,
1972. p.7
5
onda variam desde alguns poucos décimos de bilionésimos de metro, como é o caso das
ondas emitidas pelo raio-x, até várias dezenas de quilômetros como é o caso de ondas de
radio.
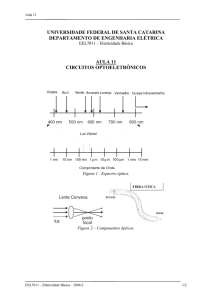
Figura 2.1: Espectro eletromagnético
Fonte: http://www.las.inpe.br/~cesar/Infrared/conceitos
Os limites do infravermelho são o visível no lado de menor comprimento de
onda e as microondas no lado de maior comprimento de onda.
“Nós podemos notar que a região do infravermelho é dividida em três áreas: o
infravermelho próximo, o intermediário, e o infravermelho distante. Essas divisões são
arbitrárias em seus limites superiores e inferiores.” 2
Na tabela 2.1 são apresentadas as subdivisões do infravermelho de acordo com a
faixa de comprimento de onda:
2
Vanzetti Riccardo. Practical Applications of Infrared Techniques. New York: John Wiley & Sons, Inc.,
1972. p.9
6
Tabela 2.1: Subdivisões do Infravermelho
Fonte: http://www.las.inpe.br/~cesar/Infrared/conceitos
“As origens da radiação infravermelha podem ser divididas em três grupos,
baseados na sua massa: Partículas subatômicas cujas vibrações se enquadram no
infravermelho próximo; Partículas atômicas cujas vibrações produzem radiação no
infravermelho intermediário; Moléculas, nas quais as vibrações e rotações geram radiação
no infravermelho distante.” 3
3
Vanzetti Riccardo. Practical Applications of Infrared Techniques. New York: John Wiley & Sons, Inc.,
1972. p.9
7
Para transmitir dados os sistemas infravermelhos utilizam freqüências muito
altas, um pouco abaixo da luz visível no espectro eletromagnético. Igualmente à luz, o sinal
infravermelho não pode penetrar em objetos opacos. Assim as transmissões por
infravermelho são diretas ou difusas.
Figura 2.2: Formas de transmissão do infravermelho
Fonte: www.dc.ufscar.br/lsredes/material/Apresent3.pdf
Este trabalho é focado no modo difuso e não direcionado, pois é assim que
funciona para controles remotos e aparelhos de DVD, televisão, som e etc. O campo de
visão do receptor não precisa ser direcionado e restrito a uma pequena linha imaginária reta
com o emissor. Ambos precisam estar no mesmo ambiente.
8
2.2.
INFRAVERMELHO WIRELESS
O infravermelho Wireless é o uso da tecnologia sem fio, através da qual, ondas
eletromagnéticas são responsáveis por transmitir sinais (dados) através do meio físico ar.
A tecnologia Wireless infravermelho é usada para pequenas e médias distâncias
de comunicação, podendo atingir até vinte metros dependendo das condições do ambiente,
do transmissor e receptor utilizados. A largura de banda utilizada é a mesma tanto no
emissor quanto no receptor. A comunicação é intermitente, diminuindo as possibilidades de
interferência.
2.3.
CARACTERÍSTICAS
“Quando a energia infravermelha colide com algum material físico, a porção
que é absorvida pelo corpo produz um efeito primário: Aumenta a energia de partículas
atômicas e subatômicas da qual a matéria física é formada, o que podemos detectar como o
fenômeno de aumento de temperatura. Essa mudança pode ser mensurada por um dos
efeitos secundários, como a variação de características físicas (volume, pressão, etc.), ou
características químicas (como em fotografia infravermelha), ou em propriedades elétricas
(condutividade, coeficiente dielétrico, emissão secundária, etc.). A velocidade com que
esses efeitos secundários se manifestam pode ser de algumas horas, necessárias para uma
reação química ou de frações de nano segundos para uma segunda emissão”.4
4
Vanzetti Riccardo. Practical Applications of Infrared Techniques. New York: John Wiley & Sons, Inc.,
1972. p.30
9
2.4.
DETECÇÃO E NEP
Todos os parâmetros de detectores infravermelhos são medidos em cima de
termos de ruído e sinal. Dessa forma, podemos dizer que os detectores podem ser sensíveis
ou não a certos ruídos. Os sensores são sensíveis quando técnicas de cancelamento de ruído
devem ser aplicadas para uma correta interpretação do sinal válido. As técnicas são as
seguintes:
• O sinal deve ser de uma natureza repetitiva, ou seja, pulsos de mesma
característica, repetidos em uma determinada freqüência.
• A existência de uma técnica para cancelar ruídos. Isso é feito através de um
equipamento chamado de Analisador de Junção Semicondutor.
Pode-se então considerar que “um detector pode detectar somente sinais cuja
magnitude é maior que o ruído gerado por si próprio” 5. Conseqüentemente, o nível de
ruído se torna o fator limitante, ou seja, quanto menor o ruído gerado pelo receptor, menor
será o nível de sinal que ele pode detectar.
NEP (Noise Equivalent Power, Potência Equivalente ao Ruído) é a potência do
sinal quando esta se iguala à potência do ruído. Assim, quanto menor o valor de NEP,
maior será a sensibilidade do detector.
5
Vanzetti Riccardo. Practical Applications of Infrared Techniques. New York: John Wiley & Sons, Inc.,
1972. p.32
10
NEP =
φ inc
Vs
Vn
(W )
(Eq. 2.1)
Equação 2.1: NEP
Onde,
φ inc é a potência radiante incidente (W);
Vs é a tensão rms do sinal de saída (V);
Vn é a tensão rms produzida pelo ruído (V);
Detectividade espectral (D) é o inverso de NEP. Essa fórmula foi criada com a
finalidade de aumentar-se a magnitude com a melhoria da performance, ou seja, quanto
maior o valor da detectividade espectral, maior será a sensibilidade do detector.
D=
1
NEP
(W )
−1
(Eq. 2.2)
Equação 2.2: Detectividade espectral
Onde,
D é a detectividade espectral;
NEP é a Potência Equivalente ao Ruído dada na fórmula anterior;
Considerando a dependência do desempenho de um detector em relação a sua
área ( AD ) e a faixa de ruído, normaliza-se a detectividade espectral e utiliza-se a
detectividade específica (D*).
11
D * = D AD
(cmHz
12
W −1 )
(Eq. 2.3)
Equação 2.3: Detectividade específica
Onde,
D* é a detectividade específica;
D é a detectividade espectral;
AD é a área do detector;
“Responsitividade de um detector é definido como a habilidade de converter
radiação em um sinal de tensão de saída. A medida é indicada como R . É expressa em
relação à tensão de saída (rms) por watt de radiação incidente.” 6
R=
D *V n
AD ∆ f
(Eq. 2.4)
Equação 2.4: Responsitividade
Onde,
R é a responsitividade;
D* é a detectividade específica;
Vn é a tensão rms produzida pelo ruído;
AD é a área do detector;
∆ f é a largura de banda;
6
Vanzetti Riccardo. Practical Applications of Infrared Techniques. New York: John Wiley & Sons, Inc.,
1972. p.33
12
3.
CIRCUITO INFRAVERMELHO
Nesse capítulo foi enfatizada a montagem do circuito receptor infravermelho e o
modo de funcionamento. Antes de seguir para a montagem do circuito, se faz necessário o
aprendizado de alguns conceitos importantes sobre a comunicação entre o circuito e o
microcomputador através do padrão RS-232.
3.1.
PADRÃO RS-232
RS-232, também chamado de conexão serial, é um padrão para a troca de dados
binários entre um DTE (Data Terminal Equipment, Equipamento Terminal de Dados) e um
DCE (Data Communication Equipment, Equipamento de Comunicação de Dados). Pode
utilizar tanto conectores DB9 (nove pinos) como conectores DB25 (vinte e cinco pinos). O
padrão de velocidade para cabos de até 15 metros é de até 115200 bits por segundo.
No protocolo de comunicação RS-232, caracteres são enviados como conjunto
de bits. A codificação mais usada é o “start-stop assíncrono” que usa um bit de início,
seguido por sete ou oito bits de dados, um bit de paridade e mais um ou dois bits de parada,
precisando de no mínimo dez bits para enviar um caractere. Por isso é necessário dividir
por dez a taxa de transmissão para obter a velocidade de transmissão.
Esse tipo de comunicação é definido na categoria “single-ended” e foi
introduzida no mercado em 1962. Canais independentes são estabelecidos em dois
caminhos (Full-Duplex). Os sinais RS232 são representados por níveis de voltagem através
13
da presença de tensão ou ausência dela. O estado “pronto” tem o nível de sinal negativo e o
estado “ativo” tem o sinal positivo.
A interface RS-232 pressupõe um aterramento comum entre o dispositivo
terminal de dados (DTE) e o dispositivo de comunicação (DCE). Isso é válido para
conexões em pequenas distâncias.
Os dados desse tipo de comunicação são bipolares, o que significa que na faixa
entre +3 Volts e + 12 Volts corresponde ao estado ligado (zero lógico) enquanto que na
faixa entre -3 Volts e -12 Volts corresponde ao estado desligado (um lógico). Os
computadores atualmente, têm a capacidade de ignorar níveis de tensão negativos e aceitam
0 Volts como desligado. Efetivamente, esses computadores precisam de tensões positivas
menores do que 3 Volts para entrar em estado lógico igual a zero. Dessa forma, qualquer
circuito de 5 Volts com corrente direta (DC) pode alimentar diretamente circuitos RS-232.
O sinal de saída da porta serial nos computadores geralmente varia de +12 Volts
a -12 Volts, contudo essa valor não é válido para a maioria dos laptops que possuem uma
saída entre +6 Volts e -6Volts. Nesse intervalo existe a chamada área morta (geralmente
entre -2 Volts e +2 Volts), designada para absorver os ruídos da linha. Nessa área não
existe presença nem ausência de pulsos.
Os chips típicos da interface RS-232, também chamados de UARTs (Universal
Asynchronous Receiver Transmitter, Receptor e Transmissor Assíncrono Universal)
permitem até 50 miliamperes (mA) de corrente por pino de saída (output), portanto se o
dispositivo a ser conectado precisar de mais de 50 miliamperes (mA) de corrente será
necessário usar no mínimo 2 pinos como fonte. Esse não é o caso do circuito receptor
infravermelho que precisa de apenas 5 Volts para operar e uma corrente de um pouco mais
de 1 miliampere (mA).
14
O conector DB9, utilizado pelo padrão RS-232, é demonstrado na Figura 3.1
com as funções de cada pino:
Figura 3.1: Pinos da interface serial RS-232
Fonte: http://www.arcelect.com/rs232.htm
Figura 3.2: Pinos conector RS-232
Fonte: http://www.arcelect.com/rs232.htm
Pino 1 – Data Carrier Detect – Detector de portadora de dados. Esse pino é
responsável por detectar os sinais transmitidos pelo controle remoto. Indica se uma boa
15
portadora está sendo recebida pelo DCE (Data Communication Equipment, Equipamento
de Comunicação de Dados).
Pino 2 – Received Data – Receptor de dados. Esse pino é responsável por
receber dados de um dispositivo DCE (Data Communication Equipment, Equipamento de
Comunicação de Dados). Não será usado no projeto, pois não existe a necessidade de se
receber dados do controle, mas apenas pulsos.
Pino 3 – Transmitted Data – Transmissor de dados. A função desse pino é
transmitir dados para um dispositivo DCE (Data Communication Equipment, Equipamento
de Comunicação de Dados).
Pino 4 – Data Terminal Ready – Terminal de dados Pronto – Esse pino indica
quando o DTE (Data Terminal Equipment, Equipamento Terminal de Dados) está pronto
para transmitir dados.
Pino 5 – Signal Ground – Sinal de Terra. Responsável pelo aterramento do
circuito.
Pino 6 – Data Set Ready – Pino responsável por indicar se o DCE (Data
Communication Equipment, Equipamento de Comunicação de Dados) está pronto para
enviar e receber dados.
Pino 7 – Request to Send – Pedido para enviar – Esse pino é responsável por
alimentar o circuito conectado na porta serial. Geralmente a alimentação é entorno de 10 a
12 Volts.
Pino 8 – Clear to Send – É o pino responsável por indicar se a transmissão pode
proceder.
Pino 9 – Ring Indicator – Pino responsável por detectar uma chamada
telefônica. Este sinal é utilizado por modems que trabalham com linha discada.
16
Para o projeto, não foi necessário a utilização de todos os pinos. Os pinos
usados pelo conector foram os seguintes:
Figura 3.3: Pinos usados no projeto
Fonte: http://www.arcelect.com/rs232.htm
•
Pino 5 (GND) – Terra
•
Pino 7 (RTS) – Fonte de tensão positiva
•
Pino 1 (DCD) – Sinal
17
O pino DCD é responsável pela presença ou ausência de sinal, que é detectado
pelo dispositivo receptor. A alimentação do circuito fica por conta do pino RTS. Essa
alimentação é de 12 Volts (no computador usado durante o projeto) e precisa ser
estabilizada em 5 Volts para alimentar o circuito. Por último o pino Terra (GND) é o
aterramento comum tanto para o computador (DTE) como para o circuito receptor (DCE) e
por essa razão se os equipamentos estiverem muito longe, com diferentes fontes de energia,
o aterramento se degradará entre os dois dispositivos e a comunicação irá falhar.
Na tabela 3.1 são demonstrados os principais pinos dos conectores DB9 e
DB25, suas nomenclaturas e siglas referentes:
Tabela 3.1: Relação de pinos e funções do padrão RS-232
Fonte: http://www.lirc.org
Sigla
TxD
RxD
RTS
CTS
DSR
GND
DCD
DTR
25 Pinos
2
3
4
5
6
7
8
20
9 Pinos
3
2
7
8
6
5
1
4
Função
Transmite dados
Recebe dados
Fonte
Transmissão procede
DCE pronto para enviar e receber
Terra
Portadora
DTE pronto para transmitir
18
3.2.
CIRCUITO/HARDWARE
O circuito eletrônico pode ser montado facilmente sem grandes custos,
possibilitando que qualquer usuário caseiro que tenha curiosidade ou pensa em facilitar as
tarefas cotidianas tome a iniciativa para a montagem do circuito.
Antes de descrever a montagem do circuito deve-se ressaltar que o driver da
porta serial do software LIRC suporta apenas chips do tipo UART (Universal
Asynchronous Receiver Transmitter, Receptor e Transmissor Assíncrono Universal)
compatíveis com o padrão 8250. UART é o chip responsável por tratar comunicações
seriais assíncronas. Os registradores compatíveis com o padrão 8250 geram interrupções
para cada caractere enviado ou recebido, que basicamente informa ao processador que
existe um dado a ser processado ou para alimentá-lo.
Existem no mercado diversos tipos de receptores infravermelhos, sendo que o
utilizado no projeto foi o Vishay TSOP 1738. Esse receptor que trabalha com a freqüência
de 38 kHz está na faixa de operação do controle remoto usado. Na maioria dos casos esse
valor fica por volta de 36 kHz a 38 kHz.
Além do receptor são necessários os seguintes componentes: Um capacitor de
4,7 Microfarad (µF); um diodo 1N4148 que protege o circuito de tensão negativa; um
resistor de 4,7 quiloohms (Kohm) que tem como objetivo manter a linha DCD em uma
tensão válida se o receptor não receber nenhum sinal; um regulador de tensão 78L05 que
irá converter a tensão de entrada em exatamente 5 Volts para que o circuito possa operar.
As ligações do circuito são ilustradas na Figura 3.4.
19
Figura 3.4: Conexões físicas do circuito receptor infravermelho
Fonte: http://www.lirc.org
Para melhor exemplificar os componentes utilizados, a Figura 3.5 demonstra
como as conexões foram feitas:
Figura 3.5: Ilustração das conexões entre os componentes
Fonte: http://www.lirc.org
É importante prestar atenção nos pinos do regulador de tensão para que o
circuito seja montado corretamente. O pino terra é o intermediário (2) e deve ser ligado em
20
série ao pino terra do receptor e ao pino terra (GND) do conector serial. O pino de entrada
(3) deve ser ligado em série ao diodo. Já o de saída (1) será conectado ao pino
correspondente à alimentação (Vcc+) do receptor. A Figura 3.6 mostra os pinos referentes:
Figura 3.6: Pinos do regulador de tensão 78L05
Fonte: http://www.tranzistoare.ro/datasheets/150/9358_DS.pdf
21
Pino 1 – Tensão de saída – Conectado em série ao pino de alimentação do
receptor TSOP 1738 (Vcc+).
Pino 2 – Terra – Conectado em série ao terra do receptor (GND) e ao pino terra
do conector serial (Pino 5 – GND).
Pino 3 – Tensão de entrada – Conectado em série ao diodo, que protege o
circuito de tensões negativas.
Os pinos relativos ao receptor TSOP 1738 são: Terra que é ligado ao pino terra
da porta serial do microcomputador. O pino de alimentação (Vs) do receptor é o
intermediário e deve ser conectado à saída do regulador de tensão. O último pino é relativo
aos sinais (pulsos) que serão recebidos pelo controle remoto. Esse pino deve ser ligado em
série com o resistor e o pino DCD da porta serial.
Figura 3.7: Pinos do receptor TSOP 1738
Fonte: http://irdeo.de/82030.pdf
22
3.2.1.
Características TSOP 1738
Existem vários tipos de detectores específicos para os mais variados tipos de
aplicações infravermelhas. Os detectores quânticos ou fóton detectores são importantes pois
serão tratados na implementação física do circuito. “Esses detectores são dispositivos
semicondutores cujas características elétricas são uma função do número de cargas que se
tornaram disponíveis pela divisão de pares de elétrons causada pela colisão de fótons no
material semicondutor.” 7
Os receptores infravermelhos Vishay TSOP 1738 são próprios para sistemas de
controle remoto infravermelho. O pino diodo é um semicondutor que opera como um
resistor entre a rádio freqüência e freqüências de microondas. O sinal de saída do receptor
pode ser diretamente decodificado por um microprocessador. Esse tipo de receptor suporta
a maioria dos códigos de transmissão.
Algumas de suas características principais são: A capacidade de ser um foto
detector e um pré-amplificador ao mesmo tempo, possuir um filtro interno para freqüências.
PCM (Pulse Codification Modulation, Modulação por Codificação de Pulso), proteção
contra distúrbios elétricos, compatibilidade com tecnologias TTL (transistor-transistor
logic, lógica transistor-transistor) e CMOS (complementary metal-oxide semiconductor,
semicondutor de metal-óxido complementar), baixo consumo de energia, alta imunidade
em ambientes com muita iluminação, transmissão de dados contínua (acima de 2400
bits/segundo).
7
Vanzetti Riccardo. Practical Applications of Infrared Techniques. New York: John Wiley & Sons, Inc.,
1972. p.45
23
3.2.2.
Funcionamento
A primeira característica a ser levada em conta é que a largura de banda
utilizada pelo sistema infravermelho é a mesma tanto no emissor quanto no receptor. A
comunicação é intermitente, diminuindo as possibilidades de interferência. Além disso,
existe o fator de limitação por parte dos receptores, sendo que os mais sensíveis podem
atingir o alcance de até 20 metros dependendo das condições do ambiente.
O circuito é alimentado através da porta serial do microcomputador no pino
RTS (Request to Send, Requisição para enviar). O diodo protege o circuito de tensões
negativas. O driver instalado na porta serial através do software LIRC muda as
características da porta serial durante sua inicialização para que o circuito consiga a tensão
positiva necessária para seu funcionamento. Na maioria dos microcomputadores a tensão na
porta serial é de aproximadamente 10 Volts. O papel do regulador de tensão é fazer com
que essa tensão de entrada se transforme em exatamente 5 Volts. Como a tensão de entrada
no regulador 78L05 deve ser no mínimo 2 Volts maior que a tensão de saída, em alguns
casos quando a tensão de entrada for menor ou igual a 7 Volts esse circuito não irá
funcionar, como é o caso de alguns laptops que possuem tensão de entrada igual ou menor
a 6 Volts. Caso a tensão de entrada seja baixa, a solução é trocar o regulador de tensão
citado por um regulador de baixa perda, ou seja, esses reguladores conseguem fornecer a
tensão de 5 Volts necessária para alimentação do circuito através de uma tensão de entrada
no valor de 6 ou 7 Volts.
24
Quando um pulso é transmitido do controle remoto para o circuito
infravermelho, o receptor detecta o sinal e puxa o sinal DCD para terra. Essa ausência de
tensão é interpretada como um sinal lógico 1 (DCD=0) pela porta serial do
microcomputador. Na ausência de pulso (sinal), o resistor mantém o sinal do pino DCD em
um nível de tensão válido, o que representa o sinal lógico 0. Cada botão de um controle
remoto possui pulsos diferentes, sendo assim a seqüência de “0”s e “1”s será diferente para
cada pulso permitindo com que o software possa aprender o que cada botão corresponde em
termos de seqüência binária. A diferença de tensão no circuito varia de 0 Volts a 5 Volts.
Para uma matriz de contatos ou protoboard 5x5 temos o seguinte esquema de
ligações:
Figura 3.8: Representação das conexões em uma matriz 5x5
Fonte: http://www.lirc.org
Após o término da montagem, o circuito receptor infravermelho teve sua
configuração conforme a foto ilustrada na Figura 3.9.
25
Figura 3.9: Foto do circuito montado no protoboard
Fonte: Autor
26
4.
AUTOMAÇÃO
Neste capítulo são abordadas algumas aplicações para o circuito receptor
infravermelho. A intenção é fazer com que algumas tarefas cotidianas sejam automatizadas
com o uso do controle remoto.
4.1.
Aplicações
A primeira aplicação para o circuito receptor infravermelho será o controle do
cursor do mouse através do controle remoto. Através dessa funcionalidade será possível
realizar apresentações de slides remotamente. Outra aplicação é executar programas,
scripts, agendar tarefas e até mesmo desligar o computador através de um botão préprogramado. Já na parte de controle de equipamentos externos será apresentado primeiro o
controle de leds conectados à porta paralela do computador. Em automação, ampliaremos
esse circuito para controlarmos equipamentos como motores, eletrodomésticos e
eletroeletrônicos. A automação a ser demonstrada será o controle de uma lâmpada através
do circuito proposto.
4.2.
Cursor do mouse
A primeira aplicação é controlar o cursor do mouse e seus comandos através do
controle remoto. Uma das vantagens é poder passar apresentações de slides sem precisar
ficar ao lado do computador. As apresentações se tornam mais dinâmicas e interessantes,
podendo ser apresentadas com a interação da platéia.
27
O software lircmd que acompanha o pacote LIRC é responsável por traduzir os
comandos do controle remoto em movimentos do mouse. Ele faz isso através da simulação
da porta do mouse. Todos os programas que acompanham o software livre LIRC,
necessários para o funcionamento da interface do circuito com o computador serão
descritos no próximo capítulo.
4.3.
Interface Paralela
Quando se fala em interface paralela (padrão RS-232) logo se pensa em um
único hardware: a impressora.
Além da impressora é possível controlar vários tipos de circuitos através da
porta paralela. É preciso ter cuidado ao montar circuitos conectados à interface paralela do
computador, pois com pequenos erros essa pode vir a ser danificada. Se a porta paralela for
integrada com a placa mãe e por algum motivo essa interface vir a ser danificada, o custo
para repará-la pode ser muito alto, compensando às vezes até mesmo substituir toda a placa
mãe do computador. Por tudo isso, o recomendado é que se compre uma placa ISA
(Industry Standard Architecture, Arquitetura Padrão de Indústria) ou PCI (Peripheral
Component Interconnect, Componente Periférico de Interconexão) com suporte à interface
paralela. Caso algum erro ocorra e a placa seja danificada, o custo será muito menor para
adquirir outra placa.
O conector da interface paralela possui 25 pinos que na maioria das vezes não
serão usados em todos os tipos de hardwares. Muitas vezes, bastam alguns pinos de saída
(dados) e pinos referentes à terra para montar variados tipos de circuitos com diversas
funcionalidades.
28
Na Figura 4.1 pode-se visualizar a funcionalidade dos pinos da porta paralela.
Figura 4.1: Pinos da interface paralela RS-232
Fonte: http://www.linhadecodigo.com.br/artigos/img_artigos/eric_cavalcanti/paralela1.gif
Registrador de dados (Data Lines) – Os pinos 2 a 9 são controlados pelo
registrador de dados (saída de dados). Através desses pinos pode-se controlar lâmpadas,
leds, equipamentos eletrodomésticos, motores e as mais variadas aplicações eletrônicas.
Através desse registrador é possível enviar dados do computador para o mundo externo
(hardware ligado à porta paralela). O endereço correspondente a esse registrador é o
seguinte: 888 (Decimal) ou 378h (Hexadecimal).
Registrador de Status (Status Lines) – Esse registrador permite que seja possível
receber dados de equipamentos conectados à interface paralela. Seu endereço é o seguinte:
889 (Decimal) ou 379h (Hexadecimal).
Registrador de controle (Control Lines) – Tem como função controlar a
impressora, embora também seja possível enviar dados para outros tipos de hardware. Tem
como endereço: 890 (Decimal) ou 37AH (Hexadecimal).
Os pinos 18 a 25 são usados como terra.
Os pinos controlados pelo registrador de dados operam com tensão de 5 Volts.
Dessa forma podemos acionar um desses pinos passando de nível lógico 0 (0 Volts) para
29
nível lógico 1 (5 Volts). A capacidade de corrente na porta paralela é limitada para poucos
miliamperes. Os pinos em questão podem tanto dissipar quanto originar corrente. Esses
pinos podem originar até 2,6 miliamperes e dissipar uma corrente de até 24 miliamperes.
Eles são formados basicamente por dois transistores empilhados em série entre +5 Volts e
terra, sendo que a saída vem da conexão entre eles. A qualquer momento um desses
transistores está conduzindo enquanto o outro não conduz.
Para colocar a saída em nível lógico elevado (nível 1), o transistor localizado
entre a tensão +5 Volts e a saída conduz, o que origina corrente positiva da saída (output)
para terra. Sendo assim, o dispositivo externo conectado entre um dos pinos de saída e um
pino terra será energizado.
30
Originando corrente – Nível lógico igual a 1:
+5 Volts
(Ligado) Alto
(Ligado)
Saída
(Desligado) Baixo
Terra
Figura 4.2: Transistores em série originando corrente
Fonte: Autor
Já para colocar a saída em nível lógico baixo (nível 0), somente o transistor
localizado entre o terra e a saída conduz, dissipando a corrente para terra.
Dissipando corrente – Nível lógico igual a 0:
+5 Volts
(Desligado) Alto
Saída
(Ligado) Baixo
Terra
Figura 4.3: Transistores em série dissipando corrente
Fonte: Autor
31
4.4.
Circuito Led
Esse circuito é muito simples de ser montado e os únicos componentes
necessários são um resistor de 470 ohms e um led que serão conectados em série. O resistor
serve apenas para limitar a corrente retirada da porta paralela para um valor aceitável,
fazendo com que o led acenda sem sobrecarregar o chip da porta paralela. Um dos pinos de
saída é conectado em série com o resistor que por sua vez é ligado ao ânodo do led. O
cátodo é ligado diretamente a algum pino terra.
Figura 4.4: Polarização do led
Fonte: http://www.clubedohardware.com.br/artigos/1147/3
Figura 4.5: Led
Fonte: http://en.wikipedia.org/wiki/LED
32
Dessa forma o esquema a ser montado é o seguinte:
Figura 4.6: Esquema de conexão da porta paralela aos leds
Fonte: http://www.epanorama.net/circuits/parallel_output.html
O controle dos leds é bastante simples. Ao ativar algum dos pinos
correspondente ao registrador de dados a tensão entre este pino e qualquer pino aterrado
será igual a 5 Volts, fazendo com que o led fique energizado.
Para manipular, por exemplo, o pino 2 (D0), o comando deve enviar uma saída
igual a 1 (Decimal) para habilitá-lo. Dessa forma, o sinal binário enviado será o byte
00000001. Esse sinal habilita o sinal do primeiro pino (D0) e desabilita todos os pinos
restantes. Da mesma forma, para habilitar apenas o segundo pino, a saída deve ser
acompanhada do número 2 (Decimal), e o byte fica da seguinte forma 00000010. Para
desabilitarmos todos os pinos a saída deve ser igual a zero.
O programa para que esta estrutura funcione é exemplificado no apêndice D.
Assim temos a seguinte relação:
Tabela 4.1: Relação dos pinos e bits referentes
Fonte: Autor
Byte
Pino
Decimal
Bit 8
D7
128
Bit 7
D6
64
Bit 6
D5
32
Bit 5
D4
16
Bit 4
D3
8
Bit 3
D2
4
Bit 2
D1
2
Bit 1
D0
1
33
4.5.
Circuito Lâmpada
O circuito com uma lâmpada já é mais complexo e necessita de maiores
precauções, já que este é ligado direto à rede elétrica de 110 ou 220 Volts. Essa aplicação já
pode ser considerada como uma automação. As pessoas podem ter a comodidade de
acender e apagar as luzes de qualquer ambiente da casa sem precisar se deslocar e podem
programar através do controle remoto um horário para que todas desliguem, ou ainda, essas
tarefas podem ser realizadas remotamente através da internet, bastando que o servidor tenha
conexão com a internet.
O circuito a ser demonstrado pode servir de exemplo para outras aplicações. É
possível controlar outros tipos de aparelhos como eletrodomésticos, robôs e
eletroeletrônicos. O princípio será o mesmo, sempre necessitando de um relé para ativar
(chavear) o circuito em questão. Como a porta paralela trabalha com uma tensão de 5 Volts
e correntes muito baixas são necessário outras fontes de alimentação para essas
automações.
O relé age como uma chave. Os três pinos que descrevem seu funcionamento
são descritos a seguir.
•
Normally Open (NO).
•
Normally Closed (NC).
•
Common (C).
34
O relé simplesmente abre e fecha um circuito elétrico, não originando energia de
forma alguma. Quando um relé está desenergizado (desligado) existe uma conexão elétrica
entre os pinos Normally Closed (NC) e Common (C), não existindo conexão entre os pinos
Normally Open (NO) e Common (C). A partir do momento em que o relé é energizado
(ligado), a conexão entre os pinos Normally Open (NO) e Common (C) é estabelecida,
fazendo com que o circuito conectado ao pino NO seja alimentado.
No caso da lâmpada, se faz necessário ligar o fio positivo da rede elétrica
110/220 Volts junto ao pino Common (C). Já o pino Normally Open (NO) será ligado à
parte positiva do bulbo da lâmpada. O neutro do bulbo da lâmpada é ligado diretamente ao
neutro da rede elétrica. Quando o relé for ligado, o pino Normally Open (NO) fechará uma
conexão com o pino Common (C), fazendo com que a energia flua pelo bulbo.
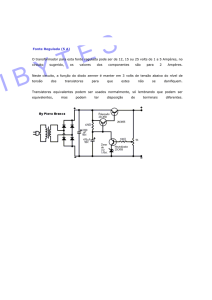
O circuito composto pelo relé e o transistor é demonstrado na Figura 4.7.
Figura 4.7: Esquema de montagem do circuito para automação lâmpada
Fonte: http://www.rogercom.com/pparalela/introducao.htm
35
• Um circuito integrado 74LS541 para proteger a porta paralela de altas
correntes.
• Um led verde para sinalizar que o circuito do relé está ativado.
• Um diodo 1N4148 em paralelo com o relé para prevenir picos de tensão.
• Um resistor de 2,2 Kohms para proteger o transistor de correntes elevadas.
• Um resistor de 470 Ohms para limitar a corrente que passa pelo led.
• Um transistor BD 137 para realizar o chaveamento entre os circuitos.
• Um relé de 12 Volts na bobina que suporte até cargas de 220 Volts/10A.
• Uma fonte de alimentação estabilizada de 12 Volts para alimentar o relé.
Outra forma de montar um circuito semelhante é a seguinte:
Figura 4.8: Esquema com a mesma funcionalidade do circuito abordado anteriormente
Fonte: Autor
36
No circuito apresentado na Figura 4.8, ao invés de usarmos o circuito integrado
para proteger a porta paralela de altas correntes, usamos dois diodos 1N4148 entre o pino
de saída e terra. Dessa forma, ao receber o sinal do pino de dados, o transistor fecha o
circuito do relé (coletor) com o terra (emissor).
Quando a corrente que passa pelo relé é retirada, esse gera um grande pico de
tensão já que sua indutância é altíssima. O diodo em paralelo com o relé previne picos de
tensão (gerados pelo relé) de danificar o computador.
4.6.
Fluxograma
Figura 4.9: Fluxograma
Fonte: Autor
37
5.
LIRC – LINUX INFRARED REMOTE CONTROL
O software livre LIRC (Linux Infrared Remote Control, Controle Remoto
Infravermelho Linux) inicialmente escrito por Ralph Metzler e atualmente mantido por
Christoph Bartelmus, tem como principal objetivo decodificar e enviar sinais
infravermelhos dos mais variados tipos de controles remotos.
O processo principal do software LIRC é o daemon lircd que irá decodificar os
sinais infravermelhos recebidos pelo driver da porta serial e prover esta informação de
forma que o processador possa interpretá-la. Além disso, o software aceita comandos para
que sinais infravermelhos sejam enviados.
Através do LIRC é possível controlar o computador pelo controle remoto,
tornando possíveis as mais diversas aplicações como as citadas em capítulos anteriores.
38
5.1.
Instalação do pacote LIRC
Para o correto funcionamento do software é necessária certa atenção e
compreensão do processo de instalação do pacote. Essas instruções são citadas a seguir.
5.1.1.
Dependências
Alguns pacotes são necessários que já estejam instalados para que o programa
LIRC obtenha sucesso na sua instalação. Para executar o script de instalação é necessário
que o sistema operacional possua o pacote dialog. Com esse script de instalação o processo
se torna mais fácil e compreensível.
Para compilar e usar todas as ferramentas disponíveis é necessário que se tenha
instalado o pacote svgalib. Caso no momento da instalação esteja faltando algum pacote de
dependência, o script de instalação notificará o usuário quais arquivos estão faltando e
consequentemente as devidas ferramentas não serão compiladas.
Antes de iniciar a instalação é necessário que o kernel do sistema operacional
seja recompilado. O arquivo fonte deve ser independente de qualquer distribuição Linux,
pois durante a compilação e instalação do software, o arquivo Makefile e a configuração do
kernel irão corrigir qualquer problema que possa vir a ocorrer. O link www.kernel.org
permite adquirir os arquivos fontes das mais variadas versões de kernel. No projeto, a
versão de kernel utilizada é a 2.4.22, considerada estável.
É recomendado que no momento da recompilação do kernel, o driver da porta
serial seja compilado como um módulo do kernel, pois normalmente o driver da porta serial
é carregado no momento que é identificado, fazendo com que os módulos do LIRC não
39
possam utilizá-lo. A opção Standard/generic (8250/16550 and compatible UARTs) serial
support deve ser configurada como módulo, para que os módulos do LIRC sejam
carregados antes do driver da porta serial. Outra solução para isso é usar o comando
setserial /dev/ttySx uart none para liberar a porta para uso do LIRC.
Antes de compilar o software LIRC é necessário escolher qual driver utilizar. O
script setup.sh facilita essa tarefa. Após escolher o driver é só salvar a configuração e
compilar o software. Caso o pacote dialog não esteja instalado será necessário configurar os
parâmetros manualmente através do comando ./configure (parâmetros).
Na Figura 5.1 é demonstrado a opção de menu que deve ser configurada para
habilitar o suporte ao módulo Standard/generic (8250/16550 and compatible UARTs) serial
support.
Figura 5.1: Configuração do Kernel
Fonte: Autor
40
Na Figura 5.2 é mostrado o referido driver da porta serial configurado como
módulo (M).
Figura 5.2: Configuração do Kernel
Fonte: Autor
5.1.2.
Instalação
Depois de compilado, para instalar o programa com as configurações realizadas
basta digitar o comando make install Todos os arquivos binários e módulos são instalados
nos locais padrões. Os dispositivos são gerados no diretório /dev.
As próximas figuras demonstram as telas de configuração, compilação e
instalação do software LIRC a partir do srcipt setup.sh.
41
Figura 5.3: Script de configuração LIRC
Fonte: Autor
42
Figura 5.4: Configuração do driver
Fonte: Autor
Figura 5.5: Configuração do driver
Fonte: Autor
43
Figura 5.6: Configuração de endereço Entrada/Saída e Interrupção
Fonte: Autor
Figura 5.7: Opção para trabalhar apenas com o módulo receptor
Fonte: Autor
44
Depois de tudo configurado o próximo passo é salvar a configuração e compilar
o software através da opção save configuration & run configure.
Figura 5.8: Configuração do Lirc
Fonte: Autor
45
Para compilar e instalar o software, após sua configuração deve-se digitar os
comandos make e make install respectivamente.
Figura 5.9: Compilação e instalação do Lirc
Fonte: Autor
O lircd (LIRC System Daemon, Daemon do Sistema LIRC), principal programa
do software LIRC executa todo o trabalho de decodificar sinais infravermelhos. Além
disso, o pacote possui um segundo daemon chamado lircmd que decodifica os comandos do
controle remoto para movimentos do mouse. Por padrão, esses daemons não são
principiados quando o sistema operacional é iniciado. Portanto, para não ter que executar
toda vez que o computador seja iniciado, o ideal é que seja criado um script de iniciação
para os daemons.
46
O próximo passo é configurar o dispositivo /dev/lircd (Socket para comunicação
com o lircd) com as permissões para que outros usuários possam se conectar ao lircd. As
permissões são alteradas utilizando-se o comando chmod 666 /dev/lircd. Isso faz com que
qualquer usuário do sistema operacional possa utilizar o socket.
Figura 5.10: Alteração de permissão
Fonte: Autor
O driver deve ser especificado no arquivo /etc/modules.conf. adicionando o
seguinte parâmetro: alias char-major-61 lirc_serial
Para especificar endereço IRQ (Interrupt Request, Requisição de Interrupção) e
I/O (Input/Output, Entrada/Saída) para o driver da porta serial deve ser adicionada a
seguinte linha no arquivo /etc/modules.conf.: options lirc_serial irq=4 io=0x3f8
47
Figura 5.11: Especificação do driver e endereçamento
Fonte: Autor
Os valores IRQ (Interrupt Request, Requisição de Interrupção) e I/O
(Input/Output, Entrada/Saída) mudam de acordo com as portas seriais que estão em uso.
Esses valores podem ser encontrados no CMOS (complementary metal oxide
semiconductor, Semicondutor complementar de óxido metal) ou no diretório /proc do
sistema de arquivo.
Para complementar a configuração, é necessário adicionar a linha /usr/local/lib
em /etc/ld.so.conf e executar o comando ldconfig. Esse arquivo especifica diretórios
padrões adicionais, que são usados como links para localizar bibliotecas compartilhadas
durante a execução do programa.
48
Figura 5.12: Especificação do diretório das bibliotecas
Fonte: Autor
5.1.3.
Teste
Para testar o hardware, o programa mode2 deve ser executado. Esse programa
carrega o driver da porta serial e mostra os sinais infravermelhos na tela em forma de
pulsos e espaços. A partir do momento em que o programa está em execução é necessário
que alguns botões do controle remoto sejam pressionados para verificar se o circuito foi
montado de forma correta.
Caso não apareça nenhum sinal de saída na tela, os procedimentos são: Verificar
primeiramente se o driver escolhido foi o correto com os parâmetros certos, em seguida
verificar se controle remoto está funcionando corretamente e finalmente verificar se o
circuito infravermelho está funcionando.
49
Para executar o daemon lircd, basta rodar o comando lircd /etc/lircd.conf, onde
se encontra o arquivo de configuração do controle remoto. Se o controle remoto a ser usado
já possuir um arquivo de configuração, basta copiá-lo para o diretório /etc com o nome
lircd.conf. Caso não exista o arquivo para o controle em questão, o programa irrecord deve
ser usado para “ensinar” o LIRC a entender o controle. Este programa deve ser executado
sem que o daemon princial lircd esteja em execução. O programa é auto-explicativo e
pedirá para apertar cada botão do controle informando os nomes correspondentes.
5.1.4.
5.1.4.1.
Programas LIRC
LIRCD
Daemon que decodifica sinais infravermelhos provendo uma interface uniforme
para diversas aplicações. A conexão com o daemon é feita através do socket /dev/lircd.
5.1.4.2.
LIRCMD
Traduz sinais infravermelhos em eventos do mouse. Esse daemon pode simular
os seguintes protocolos usados por diversos tipos de mouse: MouseSystems, IntelliMouse e
IMPS/2. Seu trabalho é o de capturar os botões recebidos pelo lircd e convertê-los em
movimentos e ações do mouse. Para que isso se torne possível é necessário criar um
arquivo de configuração somente para os eventos do mouse. Esse arquivo é o lircmd.conf.
50
5.1.4.3.
IREXEC
Tem a finalidade de executar programas ao pressionar um botão. Ao escolher
esse programa para ser executado alguns outros parâmetros de configuração devem ser
definidos de acordo com a necessidade.
5.1.4.4.
IRCAT
Imprime caracteres de acordo com a configuração.
5.1.4.5.
IRRECORD
Esse programa é fundamental para aprendizagem do controle remoto. O
programa é auto-explicativo e pedirá para apertar cada botão do controle informando os
nomes correspondentes. Dessa forma, é possível criar o arquivo de configuração do
controle remoto caso não exista no diretório contrib.
5.1.4.6.
MODE2
Esse programa mostra o tamanho dos sinais infravermelhos através de pulsos e
espaços. Através desse programa é possível certificar-se de que o circuito foi montado
corretamente ou não. Além dele, existem ainda o smode2 e o xmode2 que podem ser
executados através da interface gráfica mostrando a forma de onda captada pelo circuito.
51
5.1.5.
Diagrama de blocos
Figura 5.13: Diagrama de blocos LIRC
Fonte: Autor
52
O funcionamento é descrito baseando-se no diagrama apresentado na Figura
5.13. Como visto, o driver da porta serial usado pelo sistema operacional concorre com o
driver usado pelo sistema LIRC (Linux Infrared Remote Control, Controle Remoto
Infravermelho Linux). Assim o dispositivo /dev/lirc deve estar carregado como driver
enquanto que o dispositivo /dev/ttySxx não deve ser carregado durante a iniciação do
sistema operacional. Por isso, que ao configurar os parâmetros do kernel devemos compilálo com a opção Standard/generic (8250/16550 and compatible UARTs) serial support
configurada como módulo.
Após o sinal ser recebido pelo hardware e transmitido para o kernel do sistema
operacional através da conexão serial, este é processado pelo Daemon LIRCD (processo
principal em execução pelo software LIRC) que aceita as conexões na porta TCP 8765 e
decodifica os sinais recebidos. Após serem processados, os sinais serão tratados pelo socket
/dev/lircd que aceita várias conexões simultâneas. A partir daí serão divididos os processos
responsáveis por controlar os movimentos e ações do mouse e os demais processos que
utilizam programas secundários do pacote LIRC para executar diversos programas e tomar
certas ações ou agendar determinados scripts.
Caso a ação seja destinada ao dispositivo mouse, o processo lircmd irá tratar
esses sinais comparando ao arquivo de configuração lircmd.conf fazendo com que os sinais
sejam passados para o dispositivo /dev/lircm que se encarregará de realizar as ações
necessárias. Dessa forma, os movimentos e ações do mouse devem necessariamente ser
tratados pelo processo lircmd (lircm Daemon).
Caso os sinais recebidos pelo hardware sejam tratados por programas
secundários do pacote LIRC estes serão processados conforme as configurações do arquivo
.lircrc que se encontra no diretório home do usuário.
53
6.
6.1.
CONSIDERAÇÕES FINAIS
Conclusão
Neste trabalho foi apresentada uma proposta de automação utilizando o controle
remoto infravermelho com o objetivo de facilitar as tarefas cotidianas sem fins comerciais.
Ao longo do trabalho apresentado pode-se observar que existem uma gama de aplicações a
serem desenvolvidas.
Apenas algumas dessas aplicações foram abordadas no projeto. Outros tipos de
aplicações como o controle de motores, automatização predial, controle e programação de
outros aparelhos eletrônicos podem ser desenvolvidos.
6.2.
Dificuldades
Várias dificuldades foram encontradas durante a implementação do projeto.
A primeira foi o fato de que o receptor infravermelho Vishay TSOP 1738 não ter
sido facilmente encontrado. Este receptor foi adquirido pela internet após longo tempo de
procura.
Outra dificuldade no início foi a falta de experiência na montagem dos circuitos
e posteriormente sua soldagem em placas de circuito integrado.
Além disso, problemas na compilação do kernel foram bastante freqüentes até
que fosse possível compilá-lo com os devidos módulos.
A implementação do circuito não foi possível no notebook. Foi criada uma
máquina virtual através do software vmware, na qual foi instalado o programa LIRC. O
54
problema esta relacionado justamente ao fato de que o notebook não segue o padrão RS232 referente à tensão provida pela porta serial. O valor dessa tensão é de 6 Volts no
notebook utilizado e por isso o regulador de tensão utilizado no projeto não conseguiu
prover a tensão de 5 Volts, necessário para o funcionamento do circuito.
Outra grande dificuldade foi encontrar uma boa bibliografia sobre o assunto. A
solução foi recorrer para bibliografias internacionais que abrangem melhor o tema.
Apesar de todas as dificuldades, o resultado final correspondeu às expectativas,
sendo que foi possível implementar a automatização da lâmpada através do controle
remoto.
O custo para montar o circuito receptor é pequeno tendo em vista o grande
número de aplicações que podem ser elaboradas, o que deve servir de incentivo para que
outros projetos com base nesse possam implementar novas aplicações e até expandir o uso
do circuito para que o mesmo tenha outras finalidades.
55
6.3.
Sugestões para Trabalhos Futuros
Ampliação e desenvolvimento de outras aplicações, como por exemplo, a
automatização de uma casa com vários circuitos distribuídos pelos mais diversos ambientes
e conectados a um servidor central. Dessa forma, é possível realizar diversas tarefas com
apenas um ou mais controles remotos distribuídos pela casa. Com isso, seria possível abrir
uma porta ao acionar uma trava elétrica ou programar o microondas para ligar certo
horário. Outra possibilidade é acionar pequenos motores para fechar ou abrir persianas.
Poderia ser elaborado ainda um display acoplado ao controle remoto para receber
informações de status dos mais diversos objetos da casa.
Ainda nessa linha, é possível adicionar a esse circuito um led transmissor de
infravermelho para que se possa controlar outros dispositivos como o aparelho de TV,
DVD, som e demais aparelhos eletrônicos comandados por infravermelho.
Outra sugestão é modificar o circuito para implementar funções de transferência
de dados através do protocolo IRDA (The Infrared Data Association, Associação de Dados
Infravermelho), assim seria possível transferir dados de PDAS (Personal Digital
Assistants, Assitência Digital Pessoal) ou celulares para o computador e vice-versa.
56
REFERÊNCIAS BIBLIOGRÁFICAS
ARC Electronics. RS232 Data Interface a tutorial on Data Interface and cables. Disponível
em <http://www.arcelect.com/rs232.htm>. Acesso em: out 2005
BARTELMUS, CRISTOPH. LIRC Linux Infrared Remote Control. Disponível em
<http://www.lirc.org>. Acesso em: jun 2006
BOSCHETTI, CESAR. Conceitos Fundamentais: Radiação, Energia e Ondas. Disponível
em <http://www.las.inpe.br/~cesar/Infrared/conceitos.htm>. Acesso em: set 2005
ENGDAHL, TOMI. Parallel port interfacing made easy: Simple circuits and programs to
show how to use PC parallel port output capabilities. Disponível em
<http://www.epanorama.net/circuits/parallel_output.html>. Acesso em: fev 2006
FAGUNDES, EDUARDO. Fundamentos de Wireless LAN. Disponível em <
http://www.efagundes.com/Artigos/Wireless_LAN.htm>. Acesso em: jul 2005
FLIR
SYSTEMS.
História
do
Infravermelho.
Disponível
<http://www.flirthermography.com/brazil/about/ir_history.asp>. Acesso em: ago 2005
em
MEDEIROS,
MIGUEL.
Infravermelho
(IV).
<http://www.quiprocura.net/infra.htm>. Acesso em: set 2005
em
Mobilecomms-technology.com. IRDA (INFRARED
INTERNATIONAL.
Disponível
em
technology.com/projects/irda/>. Acesso em: mar 2006
Disponível
DATA ASSOCIATION),
<http://www.mobilecomms-
NOBILI,
PEDRO.
INFRAVERMELHO.
Disponível
<www.dc.ufscar.br/lsredes/material/Apresent3.pdf>. Acesso em: abr 2006
em
PIROPO, BENITO. Jornal o Estado de Minas. Artigo Conexões sem fio. Disponível em
<http://www.bpiropo.com.br/em20031215.htm>. Acesso em: set 2005
ROGÉRIO, ANTONIO. RORGERCOM Pesquisa e Desenvolvimento. Disponível em
<http://www.rogercom.com/ >. Acesso em: mai 2006
SearchNetworking.com.
IR
Wireless.
Disponível
em:
<http://searchnetworking.techtarget.com/sDefinition/0,,sid7_gci293474,00.html?offer=wla
nq>. Acesso em: ago 2005
SILVA, ADAILTON. As tecnologias de Redes Wireless. Disponível
<http://www.rnp.br/newsgen/9805/wireless.html#ng-ieee>. Acesso em: ago 2005
em
57
STRANGIO, CHRISTOPHER E. The RS232 Standard. Disponível em
<http://www.camiresearch.com/Data_Com_Basics/RS232_standard.html>. Acesso em: out
2005.
SUMMER, W. Ultra-violet and infra-red engineering. London: Isaac Pitman, 1962.
TORRES, GABIEL, LIMA, CÁSSIO. Construindo Protótipos Usando a Porta Paralela.
Disponível em <http://www.clubedohardware.com.br/printpage/1147>. Acesso em: fev
2006
VANZETTI, Riccardo. Practical applications of infrared techniques: A new tool in a
new di mengion for problem solving. New york: J Wiley, 1972.
VISHAY TELEFUNKEN. Photo Modules for PCM Remote Control Systems. Disponível
em <http://jap.hu/electronic/tsop17.pdf>. Acesso em: ago 2005
Wikipédia
A
enciclopédia
livre.
Artigo
RS-232.
<http://pt.wikipedia.org/wiki/RS-232>. Acesso em: out 2005
Disponível
em
58
7.
7.1.
APÊNDICES
Formato
A seguir são descritos os formatos de arquivos de configuração e do código
fonte dos programas tratados no projeto, além dos esquemas elétricos de cada circuito.
59
APÊNDICE A
7.1.1.
LIRCD.CONF
O arquivo lircd.conf que foi aprendido através do programa irrecord, possui o
seguinte formato:
# Please make this file available to others
# by sending it to <[email protected]>
# this config file was automatically generated
# using lirc-0.6.6(serial) on Thu Aug 12 16:53:23 2004
# contributed by brand: lircd.conf.panasonic.conf
# model no. of remote control:
# devices being controlled by this remote:
begin remote
name lircd.conf.panasonic.conf
bits
32
flags SPACE_ENC
eps
30
aeps
100
header
3533 1704
one
470 1268
zero
470 399
60
ptrail
474
pre_data_bits 16
pre_data
gap
0x4004
74353
min_repeat
toggle_bit
1
0
begin codes
1
0x0000000009000801
2
0x0000000009008881
3
0x0000000009004841
4
0x000000000900C8C1
5
0x0000000009002821
6
0x000000000900A8A1
7
0x0000000009006861
8
0x000000000900E8E1
9
0x0000000009001811
0
0x0000000009009891
r-tune
0x0000000009801C95
add/dlt
0x0000000009808C05
input
0x000000000900030A
book_mark
memory
reset
0x0000000009000900
0x000000000900CAC3
0x0000000009002A23
61
display
0x0000000009009C95
track-1
0x0000000009004D44
track-2
0x0000000009008D84
speed
0x00000000098050D9
vol_up
0x0000000001000405
vol_down
ch_up
ch_down
0x0000000001008485
0x0000000009002C25
0x000000000900ACA5
mute
0x0000000001004C4D
rotate
0x00000000098020A9
prog
0x0000000009808009
clear
0x000000000980A029
menu
0x0000000009806AE3
rec/time
0x0000000009001019
stop
0x0000000009000009
play
0x0000000009005059
ff
rew
pause/still
0x000000000900C0C9
0x0000000009004049
0x0000000009006069
slow
0x000000000900F0F9
skip
0x0000000009001F16
sleep
0x000000000100F0F1
on_timer
power
0x000000000100D0D1
0x000000000900BCB5
62
end codes
end remote
Cada botão é representado por um código em hexadecimal. “Os bits 0-23
contêm o tamanho pulso/espaço em microssegundos. O bit 24 é representado por zero
quando significa espaço ou um quando significa pulso. Todos os outros bits não são
usados” 8
8
Conforme BARTELMUS, Christoph. http://www.lirc.org Acesso em 22 maio/ 2006 às 23h37.
63
APÊNDICE B
7.1.2.
LIRCMD
Esse daemon é usado para emular um mouse com o controle remoto.
Dependendo do arquivo de configuração o programa converte sinais infravermelhos em
movimentos e ações do mouse. Atualmente suporta três tipos de protocolos usados por
mouse: MouseSystems, IntelliMouse e IMPS/2.
O lircmd pode ser usado com dois tipos de aplicações gráficas: X11 e gpm. O
projeto utilizou a interface gráfica X11 versão 4. Os seguintes parâmetros devem ser
adicionados na configuração do arquivo /etc/X11/XF86Config.
Section "InputDevice"
Identifier "LIRC-Mouse"
Driver
"mouse"
Option
"Device" "/dev/lircm"
Option
"Protocol" "IMPS/2"
Option
"SendCoreEvents"
Option
"Buttons" "5"
Option
"ZAxisMapping" "4 5"
EndSection
64
Além disso, a linha destacada em negrito deve ser adicionada na seção
ServerLayout:
Section "ServerLayout"
Identifier "Default Layout"
Screen
0 "Screen0" 0 0
InputDevice "Mouse0" "CorePointer"
InputDevice "Keyboard0" "CoreKeyboard"
InputDevice "DevInputMice" "AlwaysCore"
InputDevice "LIRC-Mouse"
EndSection
65
O arquivo de configuração lircmd.conf utilizado para emular os movimentos do
mouse possui o seguinte formato:
#
# lircmd config file
#
PROTOCOL IMPS/2
#PROTOCOL MouseSystems
# ACCELERATOR start max multiplier
ACCELERATOR 2 30 5
ACTIVATE lircd.conf.panasonic.conf menu
MOVE_N lircd.conf.panasonic.conf 2
MOVE_NE lircd.conf.panasonic.conf 3
MOVE_E lircd.conf.panasonic.conf 6
MOVE_SE lircd.conf.panasonic.conf 9
MOVE_S lircd.conf.panasonic.conf 8
MOVE_SW lircd.conf.panasonic.conf 7
MOVE_W lircd.conf.panasonic.conf 4
MOVE_NW lircd.conf.panasonic.conf 1
#MOVE_N lircd.conf.panasonic.conf ARROW_UP
#MOVE_E lircd.conf.panasonic.conf ARROW_RIGHT
#MOVE_S lircd.conf.panasonic.conf ARROW_DOWN
#MOVE_W lircd.conf.panasonic.conf ARROW_LEFT
MOVE_IN lircd.conf.panasonic.conf ch_up
MOVE_OUT lircd.conf.panasonic.conf ch_down
BUTTON1_TOGGLE lircd.conf.panasonic.conf 5
BUTTON2_TOGGLE lircd.conf.panasonic.conf 0
BUTTON3_TOGGLE lircd.conf.panasonic.conf play
BUTTON1_CLICK lircd.conf.panasonic.conf rotate
BUTTON2_CLICK lircd.conf.panasonic.conf mute
BUTTON3_CLICK lircd.conf.panasonic.conf prog
# BUTTONx_CLICK, BUTTONx_UP, BUTTONx_DOWN are also possible
66
Onde:
PROTOCOL – Este campo refere-se ao protocolo usado pelo mouse. As três
opções são: MouseSystems, IntelliMouse and IMPS/2
ACCELERATOR – Neste campo é possível alterar a velocidade do cursor de
acordo com o tempo em que o botão fica pressionado. O primeiro valor (start) corresponde
ao ponto inicial de aceleração. O segundo campo (max) especifica o número máximo de
pixels o cursor pode mover com um único comando. Já o terceiro campo (multiplier) é o
número que multiplicado pela quantidade de repetições de um mesmo sinal dá como
resultado o número de pixels que o cursor deve mover-se.
ACTIVATE – Tem como parâmetros o nome do controle remoto e o referido
botão para ativar o uso do controle para emular os movimentos do mouse.
TOGGLE_ACTIVATE – Tem a mesma função de ACTIVATE. A diferença é
que o comando TOGGLE_ACTIVATE se especifica o botão do controle remoto que serve
tanto para iniciar o modo de emulação do mouse quanto para parar esse modo. Já no
comando ACTIVATE, basta apenas pressionar um botão que não é usado pelo driver
lircmd para sair do modo de emulação do mouse.
MOVE_[ N [ E | W ] | E | S [ E | W ] | W ] – Especifica o botão que faz com que
o cursor do mouse se mova para um determinado ponto cardeal. O exemplo abaixo deixa
claro que o botão “2” do controle remoto panasonic faz com que o mouse se mova na
direção norte, ou seja, para cima.
MOVE_[IN|OUT] – Esse comando funciona apenas com os protocolos
IntelliMouse e IMPS/2, emulando as ações da “rodinha” do mouse.
BUTTONx_ [CLICK | DOWN | UP | TOGGLE] – Simula eventos do mouse de
acordo com a esquerda (x=1), meio (x=2) ou direita (x=3).
67
APÊNDICE C
7.1.3.
.LIRCRC
O arquivo .lircrc deve existir para que seja possível executar diversos tipos de
comandos através do controle remoto. A sintaxe desse arquivo é descrita abaixo:
begin
prog
remote
button
repeat
delay
config
mode
flags
= ...
= ...
= ...
= ...
= ...
= ...
= ...
= ...
end
“Essa sintaxe diz o seguinte: Qual o programa (prog) deve fazer o que (config,
mode, flags) se você pressionar um certo botão (remote, button) por um tempo específico
(repeat, delay).”9
PROG – Indica qual o programa a ser excutado.
REMOTE – Indica o controle remoto a ser usado para o determinado comando.
BUTTON – Especifica qual o botão deve ser pressionado para a execução do
programa. Seqüências de botões podem ser especificadas para a execução de um programa,
basta para isso repetir as opções remote/button quantas vezes forem necessárias.
REPEAT – Especifica o que acontece se houver repetição ao pressionar um
botão. O valor padrão é zero, fazendo que com que o driver ignore os botões repetidos.
9
Conforme BARTELMUS, Christoph. http://www.lirc.org Acesso em 12 maio/ 2006 às 17h54.
68
DELAY – Indica ao programa para ignorar um número específico de repetição
de um botão antes de usar a configuração de repetição acima. É usado para prevenir que um
evento seja executado mais de uma vez em um curto período. O valor padrão desse campo
é zero, o que desabilita o uso dessa função.
CONFIG – A execução da aplicação depende dessa função. Portanto, as ações
que devem ser tomadas dependem diretamente desse campo, como por exemplo a ação de
imprimir alguns caracteres na tela, ou abrir e fechar o driver do CD, ou ainda executar o
programa de acender e apagar a lâmpada.
MODE – Indica ao programa para iniciar em um modo específico.
FLAGS – Parâmetros adicionais ao MODE.
69
O arquivo .lircrc usado pelo projeto ficou da seguinte forma:
# defaults:
#
# remote = *
# repeat = 0
#
begin
remote = *
button = power
prog = irexec
repeat = 0
config = echo "Bem Vindo!"
end
begin
remote = *
button = on_timer
prog = irexec
repeat = 0
config = /usr/bin/ooimpress&
end
begin
remote = *
button = sleep
prog = irexec
repeat = 0
config = /usr/bin/eject
end
begin
remote = *
button = stop
prog = irexec
repeat = 0
config = shutdown -h now
end
begin
remote = *
button = 0
prog = irexec
repeat = 0
config = /home/rafael/lpt_completo 0
70
end
begin
remote = *
button = 1
prog = irexec
repeat = 0
config = /home/rafael/lpt_completo 4
end
71
APÊNDICE D
7.1.4.
LPT_COMPLETO
O programa lpt_completo envia um determinado valor para a porta paralela do
computador. Os valores são dados como parâmetro para o programa, sendo que podem ser
tanto decimal (0-255) como em formato hexadecimal (0x00-0xFF). Esse programa é
utilizado para acender e apagar a lâmpada.
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <asm/io.h>
#define base 0x378
/* Endereço da porta paralela*/
main(int argc, char **argv)
{
int value;
if (argc!=2)
fprintf(stderr, "Error: Esse programa precisa de um valor entre 0 e 255.\n"),
exit(1);
if (sscanf(argv[1],"%i",&value)!=1)
fprintf(stderr, "Error: Parâmetro não é um número.\n"),
exit(1);
if ((value<0) || (value>255))
fprintf(stderr, "Valor numérico inválido. O número deve estar entre 0 e 255\n"),
exit(1);
if (ioperm(base,1,1))
fprintf(stderr, "Error: Não consegue acessar a porta %x\n", base),
exit(1);
outb((unsigned char)value, base);
}
72
APÊNDICE E
7.1.5.
ESQUEMA ELÉTRICO CIRCUITO INFRAVERMELHO
A Figura 7.1 demonstra o esquema elétrico do circuito infravermelho montado
com a relação dos componentes utilizados.
Figura 7.1: Esquema elétrico circuito infravermelho
Fonte: http://www.vivaolinux.com.br/imagens/artigos/comunidade/thumb_LIRC_serial_rx1.png
Os componentes utilizados para a montagem do circuito foram os seguintes:
• 1 Receptor infravermelho Vishay TSOP 1738;
• 1 Capacitor de 4,7 µF;
• 1 Regulador de tensão 78L05;
• 1 Resistor de 4,7 Kohms;
• 1 Diodo 1N4148.
73
APÊNDICE F
7.1.6.
ESQUEMA ELÉTRICO CIRCUITO LÂMPADA
A Figura 7.2 demonstra o esquema elétrico do circuito que tem como função
ligar e desligar a lâmpada.
Figura 7.2: Esquema elétrico circuito lâmpada
Fonte: Autor
Os componentes utilizados para a montagem do circuito foram os seguintes:
• 1 LED verde ;
• 1 Diodo 1N4148;
• 1 Resistor R1: 2,2 Kohm;
• 1 Resistor R2: 470 ohm;
• 1 Transistor BD 137;
74
• 1 Circuito Integrado 74LS541;
• 1 Relé de 12 Volts na bobina – 220 V/ 10 A;
• 1 Fonte de alimentação estabilizada de 12 Volts.
75