UNIVERSIDADE FEDERAL DO PARANÁ
RENATO FRANÇA SARAN
GRR20001270
DESENVOLVIMENTO DE UMA
CARGA ELETRÔNICA DC
CURITIBA – PR
NOVEMBRO – 2006
UNIVERSIDADE FEDERAL DO PARANÁ
SETOR DE TECNOLOGIA – CENTRO POLITÉCNICO
DEPARTAMENTO DE ELETRICIDADE
CURSO DE ENGENHARIA ELÉTRICA
RENATO FRANÇA SARAN
GRR20024554
DESENVOLVIMENTO DE UMA
CARGA ELETRÔNICA DC
Trabalho de graduação apresentado
à disciplina TE105 – Projeto de graduação,
sob a orientação do Professor Odilon Luís
Tortelli e co-orientação do engenheiro
Robert César Weber.
CURITIBA – PR
NOVEMBRO – 2006
ii
AGRADECIMENTOS
Agradeço, em primeiro lugar, aos meus pais e familiares, que sempre me
deram total apoio e condições para que eu pudesse atingir meus objetivos.
Agradeço aos verdadeiros amigos que nos acompanharam nestes anos de luta,
compartilhando bons momentos e acima de tudo me ajudando e motivando em momentos
de dificuldade.
Agradeço ao Engenheiro Eletricista co-orientador Robert César Weber, pela
sua colaboração e apoio ao projeto.
Agradeço ao Professor Orientador Odilon Luis Tortelli, por ter se mostrado
sempre à disposição e pronto para ajudar.
Agradeço às empresas SyncTec e Gauss por terem possibilitado o
desenvolvimento do projeto através da parceria realizada com o autor.
Agradeço ao Professor Horácio Tertuliano dos Santos Filho, pela sua paciência
e atenção dedicada aos acadêmicos, e por sua luta constante pela melhoria do nosso curso.
iii
SUMÁRIO
LISTA DE ILUSTRAÇÕES ........................................................................................VII
LISTA DE TABELAS................................................................................................ VIII
LISTA DE ABREVIATURAS E SIGLAS ................................................................... IX
RESUMO.........................................................................................................................X
1.
INTRODUÇÃO ....................................................................................................... 1
1.1.
Considerações Iniciais ....................................................................................... 1
1.2.
Objetivo do trabalho .......................................................................................... 2
2.
PARCEIRIAS ............................................ERROR! BOOKMARK NOT DEFINED.
2.1.
SyncTec Projetos e Automação.......................... Error! Bookmark not defined.
2.2.
Gauss Indústria e Comércio de Autopeças ......... Error! Bookmark not defined.
3.
EXEMPLOS DE APLICAÇÕES: .......................................................................... 4
3.1.
Bancada para testes de alternadores automotivos ............................................... 4
3.2.
Test Bed utilizado para desenvolvimento de um controlador de retificadores:..... 5
4.
METODOLOGIA DE DESENVOLVIMENTO .................................................... 8
5.
VISÃO SISTÊMICA ............................................................................................... 9
5.1.
Placa controladora: ............................................................................................ 9
5.1.1.
Função gerenciamento de carga ................................................................... 10
5.1.1.1.
Acionamentos de relês.......................................................................... 10
5.1.1.2.
Porta PWM .......................................................................................... 10
5.1.1.3.
Conversor analógico digital.................................................................. 11
5.1.1.4.
Master I2C ........................................................................................... 11
5.1.2.
Função HMI ................................................................................................ 11
5.1.3.
Função interface........................................................................................... 12
5.1.3.1.
RS-232................................................................................................. 12
iv
5.1.3.2.
5.2.
RS-485................................................................................................. 12
Placa driver e módulo de potência ................................................................... 12
5.2.1.
Placa driver.................................................................................................. 13
5.2.2.
Módulo de potência ..................................................................................... 13
6.
DETALHAMENTO DO HARDWARE E CONFIGURAÇÃO........................... 15
6.1.
Placa controladora ........................................................................................... 15
6.1.1.
Microcontrolador ......................................................................................... 15
6.1.2.
Sinais PWM................................................................................................. 16
6.1.3.
Sinais para acionamentos de relês ................................................................ 17
6.1.4.
Conversor analógico digital.......................................................................... 18
6.1.5.
Interface USART ......................................................................................... 19
6.1.5.1.
Interface RS-232 .................................................................................. 19
6.1.5.2.
Interface RS-485 .................................................................................. 21
6.1.6.
Máster I2C................................................................................................... 22
6.1.7.
Display ........................................................................................................ 23
6.1.8.
Teclado........................................................................................................ 24
6.1.9.
Rotary encoder............................................................................................. 25
6.2.
Placa driver...................................................................................................... 25
6.3.
Módulo de potência ......................................................................................... 29
7.
ESTRUTURAÇÃO DO FIRMWARE.................................................................. 31
7.1.
Estruturação dos dados .................................................................................... 31
7.2.
A estrutura MMI.............................................................................................. 31
7.3.
A função Main................................................................................................. 32
8.
SOFTWARE DE GERÊNCIA.............................................................................. 35
9.
ANÁLISE DE CUSTOS ........................................................................................ 36
v
10.
CONCLUSÃO................................................................................................ 37
11.
BIBLIOGRAFIA ........................................................................................... 38
vi
LISTA DE ILUSTRAÇÕES
ILUSTRAÇÃO 1 – BANCADA DE TESTES DE ALTERNADORES AUTOMOTIVOS,
G-5000. ..................................................................................................................... 5
ILUSTRAÇÃO 2 – TEST BED UTILIZADO PARA TESTES E VALIDAÇÃO DO
CONTROLADOR DE RETIFICADORES................................................................ 7
ILUSTRAÇÃO 3 – DIAGRAMA EM BLOCOS DA PLACA CONTROLADORA........ 10
ILUSTRAÇÃO 4 – DIAGRAMA EM BLOCOS MÓDULO DE POTÊNCIA + PLACA
DRIVER ................................................................................................................. 13
ILUSTRAÇÃO 6 – MODOS DE OPERAÇÃO DO TIMER B........................................ 17
ILUSTRAÇÃO 7 – CIRCUITO DE CONDICIONAMENTO E PROTEÇÃO PARA
ENTRADAS ANALÓGICAS ................................................................................. 18
ILUSTRAÇÃO 8 – FORMATO DO CARACTERE RS-232........................................... 20
ILUSTRAÇÃO 9 – MAX232.......................................................................................... 21
ILUSTRAÇÃO 10 – CI SN75176 ................................................................................... 21
ILUSTRAÇÃO 11 – PROTOCOLO I2C......................................................................... 23
ILUSTRAÇÃO 12 – INTERFACE ENTRE MSP E LCD. .............................................. 24
ILUSTRAÇÃO 13 – CIRCUITO DO TECLADO. .......................................................... 25
ILUSTRAÇÃO 14 – CIRCUITO DRIVER DE CORRENTE........................................... 26
ILUSTRAÇÃO 15 – EXEMPLO DE SINAL PWM........................................................ 27
ILUSTRAÇÃO 16A – TENSÃO DE BASE E SINAL PWM.......................................... 28
ILUSTRAÇÃO 16B - TENSÃO DE BASE APÓS ALTERAÇÃO NO DUTY CICLE. ... 29
ILUSTRAÇÃO 17 – FOTO MÓDULO DE POTÊNCIA E PLACA DRIVER. ................ 30
ILUSTRAÇÃO 18 – FLUXOGRAMA FUNÇÃO MMI ................................................. 32
ILUSTRAÇÃO 19 – FLUXOGRAMA DA FUNÇÃO MAIN......................................... 34
ILUSTRAÇÃO 20 – TELA DE EXEMPLO DO SOFTWARE DE GERÊNCIA............. 35
vii
LISTA DE TABELAS
TABELA 1 – VALORES MÁXIMOS DE OPERAÇÃO DO TBJ DE POTÊNCIA
................................................................ ERROR! BOOKMARK NOT DEFINED.
TABELA 2 – ESTIMATIVA DE CUSTOS PARA O EQUIPAMENTO.............. ERROR!
BOOKMARK NOT DEFINED.
TABELA 3 – CUSTO DAS CARGAS ELETRÔNICAS AGILENT.................... ERROR!
BOOKMARK NOT DEFINED.
viii
LISTA DE ABREVIATURAS E SIGLAS
DC
- Direct current
RS-232
- Padrão elétrico para comunicação serial
RS-485
- Padrão elétrico para comunicação serial
GPIB
- Tipo de protocolo para comunicação
HMI
- humam machine interface
PWM
- Pulse width modulation
I2C
- Inter IC Control
LCD
- Liquid Crystal Display
ADC
- Analogic Digital Converter
RISC
- Reduced Instruction Set Complex
USART
- Universal Synchronous Asynchronous Receive Transmit
UART
- Universal Asynchronous Receive Transmit
QFP
- Quad Flat Package
RAM
- Random Access Memory
JTAG
- Joint Test Action Group
CPU
- Central Processor Unit
MSP
- Mixed Signal Processor
SPI
- Synchronous Peripheral Interface
EIA
- Eletronics Industries Alliance
ASCII
- American Standard Code for Information Interchange
ix
RESUMO
Diversas áreas da indústria são compostas por sistemas que envolvem
equipamentos geradores, conversores ou armazenadores de energia. Quando em fase de
desenvolvimento tanto os sistemas quanto os equipamentos precisam ser testados e
homologados, para tanto é uma prática comum a aplicação de cargas neste tipo de sistema
para que se possa simular várias situações práticas. Existem cargas podem ser puramente
resistivas, estas quando de alta potência possuem grandes dimensões físicas e praticamente
não são utilizadas em sistemas que utilizam testes com certo grau de automação. Uma
alternativa é o uso de cargas eletrônicas, que são equipamentos relativamente mais
compactos, com maior grau de flexibilidade e com recursos que permitem que os testes
sejam facilmente automatizados, este documento descreve o desenvolvimento de uma
carga eletrônica para corrente contínua que apesar de ter requisitos voltados a uma
aplicação especifica foi desenvolvida de forma a permitir maior flexibilidade e potencial de
utilização em áreas diversas.
x
1. INTRODUÇÃO
1.1. Considerações Iniciais
Grande parte dos equipamentos eletrônicos é alimentada por tensão contínua
e pode exigir diferentes níveis de tensão para que seus componentes sejam alimentados de
forma adequada, por este motivo há uma diversidade de componentes que constituem
circuitos de alimentação. Entre estes componentes encontram-se fontes de alimentação,
conversores DC-DC, reguladores de tensão e controladores de hot-swap, os itens citados
acima tem grande probabilidade de serem encontrados em placas para equipamentos
usados em telecomunicações, projetos de automação e na maioria dos circuitos eletrônicos.
Os dispositivos descritos até agora são integrantes geralmente de circuitos de
alimentação para equipamentos de pequeno e médio porte, a maioria com potência baixa,
de até 30 ou 40 watts.
Entre circuitos de alimentação há também equipamentos que possuem a
função de alimentar grandes sistemas como armários de telecomunicações, centrais
telefônicas ou até sistemas embarcados como no caso da parte elétrica de um carro, nestes
casos a potência pode chegar a valores muito elevados como 50 kW ou mais e passam a
fazer parte destes sistemas retificadores de tensão e bancos de baterias.
Todos estes componentes e sistemas quando em fase de desenvolvimento ou
quando se faz necessário algum tipo de alteração precisam ser testados e homologados.
Muitas vezes pode ser excessivamente trabalhoso, caro ou até mesmo impossível realizar
todos os testes necessários em campo, ou com sistemas completos como os que serão
utilizados na prática, portanto o que geralmente se faz é utilizar equipamentos que simulem
as cargas as quais os sistemas e circuitos serão submetidos durante sua utilização prática.
Para tanto pode-se usar cargas puramente resistivas, porém estas quando de alta potência
tornam-se fisicamente grandes, além de possuir menor flexibilidade para realizar testes
dinâmicos e dificilmente são utilizadas em testes que exigem certo grau de automatização.
Uma alternativa é a utilização de cargas eletrônicas, apesar de haver no
mercado diversos tipos de cargas eletrônicas de vários tamanhos e potências elas são
relativamente mais compactas do que as cargas puramente resistivas e podem chegar a
dissipar uma potência de 50 kW, são variáveis e podem ser controladas por uma interface
homem-máquina e geralmente têm disponível algum tipo de interface capaz de se
comunicar com outros equipamentos como RS-232, RS-485, GPIB e outras. Este tipo de
1
interface possibilita a automatização de testes, uma ferramenta que pode ser bastante útil
quando a carga é utilizada em aplicações especificas.
1.2. Objetivo do trabalho
O Projeto surgiu com a necessidade de se realizar testes em alternadores
automotivos, um sistema capaz de realizar testes de forma automatizada foi desenvolvido,
tal sistema pressupõe que esteja conectado a ele um equipamento que possa drenar corrente
do alternador, a corrente deve variar dependendo do tipo de teste que esta sendo realizado
no momento.
Partindo do pressuposto de que a aquisição de uma carga eletrônica
disponível no mercado e que cumprisse os requisitos do projeto inviabilizaria em termos de
custos a implantação do sistema de testes, a solução encontrada foi desenvolver uma carga
eletrônica.
Como foi observado que tal equipamento poderia com pouco esforço extra em
termos de desenvolvimento cumprir não só os requisitos desta aplicação específica, mas
também de várias outras aplicações, foi decidido que seria desenvolvido uma carga
eletrônica DC, que teria seus requisitos não só atrelados às necessidades dos testes em
reguladores automotivos mas que seria também dentro das possibilidades o mais flexível
possível para que ao final do desenvolvimento torne-se não apenas uma solução para esta
aplicação mas também um produto que possa ser utilizado em uma gama maior de
aplicações.
1.3. Parcerias
Para tornar viável o desenvolvimento deste projeto o autor o fez em parceria
com a empresa SyncTec. Durante o desenvolvimento de uma bancada para testes de
alternadores a SynTec constatou que havia necessidade de uma solução adequada para
drenar corrente dos alternadores ou baterias para que os testes fossem realizados de forma
satisfatória. Tal solução deveria possibilitar a variação da carga aplicada de acordo com o
teste que esta sendo realizado e, portanto estabelecer uma comunicação com o sistema de
testes para que este informe qual o valor da corrente que deve ser drenada em determinado
momento. Este foi o passo inicial para se começar a pensar no desenvolvimento de uma
carga eletrônica DC.
2
1.3.1.SyncTec Projetos e Automação
A SyncTec está localizada na cidade de Curitiba e atua no ramo de projetos
eletrônicos e de automação industrial desde 2002, entre os pontos fortes de seus serviços
está o desenvolvimento de sistemas de testes.
A empresa conta com laboratório de eletrônica devidamente equipado e tem a
disposição todos os recursos necessários para o desenvolvimento de um projeto desde
compiladores necessários para o desenvolvimento de firmware até fornecedores para
fotolitos e placas de circuito impresso.
Os recursos necessários para realizar o desenvolvimento de hardware,
software e firmware para o projeto foram disponibilizados ao autor pela empresa.
1.3.2.Gauss Indústria e Comércio de autopeças
A Indústria Gauss atua no ramo de componentes elétricos automotivos e vem
desenvolvendo projetos com a SyncTec já a algum tempo. Os projetos são na maioria
sistemas de teste e calibração dos componentes automotivos fabricados, entre os principais
projetos estão o teste automático de retificadores automotivos, e o teste/calibração
automático de reguladores automotivos.
A bancada para testes de alternadores automotivos foi um sistema inovador
para o qual surgiu a necessidade do desenvolvimento de uma carga eletrônica. Detalhes
desta aplicação serão expostos no capítulo aplicações.
A Gauss se dispôs a desenvolver a solução mecânica tanto para os módulos de
potência que são integrantes da carga eletrônica, quanto para o gabinete padrão rack 19
polegadas no qual o equipamento será acomodado.
3
2. EXEMPLOS DE APLICAÇÕES
O Autor teve a oportunidade de acompanhar algumas situações em que a
carga eletrônica em questão poderia ser utilizada resultando em ganhos para os sistemas,
estes sistemas tiveram suas características observadas e durante o desenvolvimento da
carga eletrônica seus requisitos foram levados em conta e resultaram no desenvolvimento
de recursos e funcionalidades da carga.
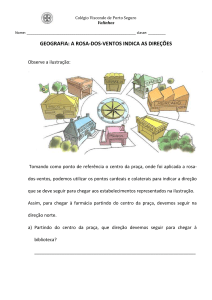
2.1. Bancada para testes de alternadores automotivos
Um dos focos de aplicação para a carga eletrônica foi a bancada de testes para
alternadores automotivos G-5000. Esta bancada constitui um sistema inovador para testes
de alternadores automotivos proporcionando testes práticos e automatizados.
Dentre os objetivos da bancada está o de simular o funcionamento do alternador em um
carro ou caminhão, para tanto há acoplado ao alternador um motor capaz de controlar a
rotação do mesmo e é necessário que haja uma carga variável que possa ser controlada
pelo sistema, para que seja simulada a carga de um veículo. São partes integrantes do
sistema também um banco de baterias e um monitor LCD que exibi os resultados dos
testes.
A G-5000 comunica-se com a carga eletrônica por meio de uma interface RS-232. A
Ilustração 1 é uma foto da G-5000, podemos notar do lado esquerdo uma carga resistiva
variável que foi adaptada temporariamente para que os testes fossem realizados. Como esta
carga é controlada manualmente assim também são feitos os testes, implicando em menor
precisão
dos
resultados
e
4
maior
tempo
despendido.
Ilustração 1 – Bancada de testes de alternadores automotivos, G-5000.
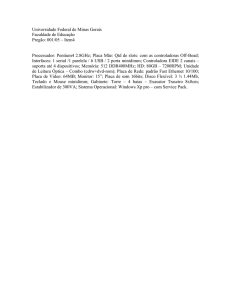
2.2. Test Bed utilizado para desenvolvimento de um controlador de retificadores
5
Uma empresa conhecida e atuante no mercado de telecomunicações está
desenvolvendo um controlador de retificadores, tal equipamento é utilizado para gerenciar
circuitos de alimentação utilizados em telecomunicações. Os componentes básicos deste
sistema são retificadores, banco de baterias e o controlador de retificadores. O controlador
é um equipamento extremamente versátil, capaz de se comunicar com vários tipos de
retificadores e assegurar seu uso adequado de acordo com a carga a qual o sistema esta
submetido em determinado momento e de acordo com o tipo das baterias utilizadas no
sistema.
Para simular as cargas reais que seriam alimentadas por tal sistema pode-se
utilizar cargas eletrônicas e assim realizar testes em funções do controlador como o
compartilhamento de carga entre retificadores, drenar corrente do banco de baterias
fazendo com que sua tensão caia e verificar se o sistema inicia uma carga de baterias e
diversas outras funções.
A carga eletrônica por ser um equipamento flexível no qual o usuário pode
programar facilmente a corrente de entrada de acordo com sua necessidade tornaria o
sistema de testes muito prático e flexível. Na Ilustração 12 uma foto do test bed. Podemos
identificar a presença de retificadores na parte superior da imagem, bancos de baterias na
parte inferior e cargas resistivas à esquerda. Há também um painel com disjuntores
6
utilizado para conectar os retificadores, baterias e as cargas ao barramento DC.
Ilustração 2 – Test bed utilizado para testes e validação do controlador de
retificadores.
7
3. METODOLOGIA DE DESENVOLVIMENTO
Para tornar o desenvolvimento do projeto mais prático e ao mesmo tempo
otimizar o uso do tempo o projeto pode ser dividido em work packages, ou seja, áreas que
podem ser ativadas e validadas de maneira independente, realizando-se em determinado
momento a integração de todos os componentes.
Abaixo estão listados os work packages identificados pelo autor:
Adaptação da placa controladora aos requisitos do projeto e ativação de seus recursos;
Desenvolvimento da placa driver;
Acompanhamento do desempenho dos módulos de potência durante os testes;
Projeto do firmware para o microcontrolador na placa controladora;
Projeto do software de gerência para o equipamento.
Acompanhamento da solução mecânica.
No entendimento do autor a divisão proposta é importante, pois alguns dos
itens acima podem ficar por períodos de tempo bloqueados já que exigem recursos
externos, como a confecção de placas e fotolitos, o projeto mecânico e outros, em situações
deste tipo o autor pôde voltar seus esforços para outro ponto do projeto que podia ser
desenvolvido.
8
4. VISÃO SISTÊMICA
Neste capítulo é apresentada uma visão geral dos recursos de hardware do
sistema. Os diagramas tem por objetivo ilustrar apenas os principais sinais e suas funções,
portanto não são apresentados os circuitos elétricos.
O equipamento foi projetado de forma modular, a placa controladora é capaz
de controlar independentemente quatro módulos de potência. A configuração completa do
equipamento inclui uma placa controladora, quatro placas driver e quatro módulos de
potência. Caso seja necessária a retirada ou a desativação de qualquer um dos módulos, os
demais continuarão funcionando sem problema algum. Neste caso a potência total da carga
torna-se flexível e varia de acordo com o número de módulos que estão sendo utilizados.
Outras vantagens como a facilidade de manutenção e montagem, o controle
independente de cada módulo e a otimização de custos para determinadas aplicações que
demandam menor potência são conseqüências desta arquitetura.
Utilizando-se desta arquitetura o operador tem flexibilidade para configurar o
equipamento segundo suas necessidades. O funcionamento foi estruturado em quatro
grupos, os módulos são independentemente configurados em um dos quatro grupos ou não
configurados, o que faz com que sejam desativados. Por exemplo, se o operador deseja
disponibilizar toda a potência da carga para apenas uma fonte de energia ele pode
configurar os quatro módulos para operarem no mesmo grupo. Mais detalhes sobre esta
estruturação serão dados no capítulo 7.
4.1. Placa controladora:
9
...
...
RS-485
RS-232
Ilustração 3 – Diagrama em blocos da placa controladora.
A placa controladora desempenha as funções de gerenciamento de carga,
HMI e interface da carga eletrônica com outros equipamentos.
4.1.1.Função gerenciamento de carga
A função gerenciamento de carga envolve os sinais utilizados para o controle
(saídas) e monitoramento (entradas) dos módulos de potência. Cada tipo de sinal está
brevemente descrito a seguir:
4.1.1.1.Acionamentos de relês
Na Ilustração 3 podemos observar a existência de sinais para acionamento de
relês. Os sinais de acionamentos de relês são saídas que controlam os relês das placas
driver. São quatro sinais, um para cada placa driver. Quando acionado o relê polariza os
circuitos necessários para a ativação dos módulos de potência, neste estado o sinal PWM
passa a controlar a corrente drenada pelo módulo, se o relê for desativado o módulo de
potência é desativado, não drena corrente, e o sinal PWM não surti nenhum efeito.
4.1.1.2.Porta PWM
A ilustração 3 mostra uma porta PWM. Na porta PWM são gerados os sinais
PWM que controlam a corrente drenada por cada módulo de potência. Nesta porta são
gerados 4 saídas PWM, uma para cada placa driver. Os sinais PWM são controlados de
10
forma independente e controlam a corrente drenada pelos módulos de potência de acordo
com o duty cicle do sinal PWM gerado. Uma informação detalhada sobre a programação
desta porta pode ser obtida no capítulo 6.
4.1.1.3.Conversor analógico digital
Na Ilustração 3 há um bloco de conversor analógico digital. Para utilização do
conversor analógico digital são disponibilizadas oito entradas analógicas de tensão. As
entradas de A0 a A3 foram utilizadas para realizar as leituras das saídas analógicas
provenientes dos sensores de corrente nas placas driver, estes sensores medem a corrente
drenada por cada módulo de potência As entradas de A4 a A7 foram utilizadas para
monitorar a tensão de entrada em cada módulo de potência.
4.1.1.4. Master I2C
Na placa controladora foi implementado um barramento I2C. Tal barramento
é utilizado para estabelecer a comunicação com os sensores de temperatura presentes nos
módulos de potência. Esse barramento oferece muita praticidade para este tipo de
aplicação, pois utilizando-se de apenas dois pinos do microcontrolador é possível se
comunicar com vários dispositivos I2C conectados em paralelo. Nesta solução o
barramento I2C é utilizado para que o microcontrolador possa se comunicar com quatro
sensores de temperatura, um em cada módulo de potência.
4.1.2.Função HMI
HMI é um termo comummente usado entre desenvolvedores e vem do inglês
Humam Machine Interface, ou seja, interface homem máquina. É através da HMI que o
operador poderá de forma manual ter acesso a menus de configuração, monitoramento,
controle da carga eletrônica DC.
Para este equipamento foi desenvolvida uma HMI muito simples e prática,
composta por um LCD, um teclado com seis botões e um rotaty encoder, um rotary
encoder é uma chave digital muito usada tanto em aparelhos de som, como em áreas
11
industriais e é um método muito prático quando se quer incrementar ou decrementar
valores.
4.1.3.Função interface
Os recursos de interface são utilizados para que a carga eletrônica possa ser
gerenciada por outros equipamentos, possibilitando assim a automatização de testes. Estão
disponíveis no hardware dois tipo de interfaces que podem ser utilizadas para estes
propósitos, uma RS-232 e uma RS-485, estas interfaces estão descritas abaixo.
4.1.3.1.RS-232
A interface RS-232 é uma interface full duplex utilizada para estabelecer
comunicação ponto a ponto. Para esta aplicação a interface RS-232 é utilizada para que a
carga possa estabelecer comunicação com o software de gerência ou para que a mesma seja
gerenciada por algum outro equipamento.
4.1.3.2.RS-485
A interface RS-485 é uma interface half duplex e é capaz de estabelecer
comunicação multi ponto. Apesar de esta interface estar disponível no hardware ela não
foi ativada por não ser necessária a nenhuma aplicação imediata. Esta interface poderia ser
utilizada, por exemplo em alguma aplicação onde fosse necessário conectar em paralelo
várias cargas eletrônicas e fosse utilizado o compartilhamento de corrente entre cargas,
apesar de esta ser uma aplicação interessante, no entendimento do autor seria um próximo
passo do projeto, talvez uma nova versão já que a implementação deste tipo de recurso
teria grande impacto no firmware e no hardware atual.
4.2. Placa driver e módulo de potência
Neste capitulo são descritos os sinais presentes na placa driver e no módulo
de potência.
12
Ilustração 4 – Diagrama em blocos módulo de potência + placa driver
4.2.1.Placa driver
Esta placa faz a interface do módulo de potência com a fonte externa sob teste
e também com a placa controladora, enviando e recebendo desta, sinais de gerência.
Na Ilustração 4 as flechas grandes vermelha e preta indicam os terminais de entrada e saída
de corrente da fonte externa, respectivamente.
A placa driver recebe da placa controladora dois sinais, o sinal de
acionamento do relê que ativa o módulo de potência e o sinal PWM, o sinal que é aplicado
na base dos transistores de potência é um sinal DC e varia de acordo com o duty cicle do
PWM.
São enviados para a placa controladora dois sinais analógicos, um é a saída do
sensor de corrente presente nesta placa e o outro uma amostra da tensão na entrada da
carga, estes sinais após condicionados são lidos pelo ADC.
É também através desta placa que a placa controladora se comunica com os sensores de
temperatura, já que a placa controladora não possui interface direta com os módulos de
potência.
4.2.2.Módulo de potência
O módulo de potência é uma placa muito simples da qual fazem parte apenas
os transistores TBJ de potência, resistores de potência, o sensor de temperatura e um
conector que faz a interface com a placa driver. Na Ilustração 4 a flecha vermelha indica os
coletores dos transistores que são conectados em paralelo, barramento positivo da fonte
externa, os emissores são conectados por meio de resistores de potência de baixa
13
impedância ao barramento negativo da fonte. As bases também todas em paralelo recebem
um sinal DC que varia de acordo com o duty clicle do sinal PWM, controlando assim a
corrente que é drenada pelo conjunto de transistores.
14
5. DETALHAMENTO DO HARDWARE E CONFIGURAÇÃO
Neste capítulo são apresentadas especificações do hardware, e alguns detalhes
de especificação do firmware, detalhes estes que impactam diretamente no hardware como
a configuração de dispositivos programáveis. Serão descritos também os circuitos
integrados utilizados e diagramas elétricos.
5.1. Placa controladora
5.1.1.Microcontrolador
O microcontrolador utilizado foi o MSP430F149 da Texas Instruments. Logo
abaixo alguns recursos deste dispositivo:
Pode ser alimentado com baixa tensão de 1,8 a 3,6 volts;
Arquitetura RISC de 16 bits;
Executa uma instrução de código a cada 125ns;
Dois timers de 16 bits;
Conversor analógico digital de 12 bits;
Duas interfaces de comunicação serial, USART;
Encapsulamento QFP de 69 pinos.
Memória flash de programa de 60 kbytes;
Memória flash de informação de 256 bytes;
Memória RAM de 2 kbytes;
Interface JTAG de programação em placa, regulamentada pela IEEE 1149.1;
Este microcontrolador é o que possui mais recursos em sua família. Tem 6
portas de 8 pinos cada, que podem ser configurados como entradas, saídas ou ainda para
executar uma função periférica do dispositivo, na ilustração 5 podemos observar
arquitetura e recursos.
15
Ilustração 5 – Arquitetura do microcontrolador
O Microcontrolador é programado em placa através da interface JTAG que
pode ser usada também para emulação em tempo real. Possui entradas para dois cristais,
neste projeto foram usados um cristal de 8 MHz e um de 32 kHz. O cristal de 8 MHz é
utilizado como clock para CPU e o cristal de 32 kHz como referência para os timers.
5.1.2.Sinais PWM
Para que fosse possível gerar os sinais PWM o timer B foi configurado no
modo up e o modo de saída como Reset/Set. Com o timer B configurado desta maneira e a
porta 4 configurada para exercer sua função periférica os sinais PWM serão gerados na
porta 4. O período dos sinais PWM é configurado através do registrador TBCCR0 e o duty
cicle de cada um dos sinais é configurado independentemente através dos registradores
TBCCR1, TBCCR2, TBCCR3 e TBCCR4. Os modos de operação do timer B podem ser
observados na Ilustração 6.
16
Ilustração 6 – Modos de operação do timer B.
Convém notar que no modo Reset/Set o registrador TBCL1 deve ser carregado com o
tempo que se deseja que o sinal permaneça em nível lógico alto, e o registrador TBCL0
deve ser carregado com o período do sinal.
Este modo de geração de sinais PWM é muito útil, pois, depois de configurado
ele passa a atuar por hardware e não utiliza processamento da CPU, possibilitando assim
que os quatro sinais sejam controlados de forma independente sem que haja perda de
desempenho da CPU.
Os quatro sinais PWM gerados na placa controladora passam por um buffer e
são transmitidos para a placa driver.
5.1.3.Sinais para acionamentos de relês
Os sinais de acionamentos de relês estão localizados na porta 5 e os pinos
estão configurados como saídas. Como as saídas do MSP são de 3,3V, que é tensão de
alimentação do chip, e os relês utilizados são acionados por 12V , um ULN2003 foi
usado para realizar a interface. O ULN2003 é um array de transistores integrado. Quando
17
as entradas estão em nível lógico 1 as saídas são chaveadas para o terra, quando as entradas
estão em nível lógico 0 as saídas ficam em coletor aberto. O circuito do relê será
apresentado no capítulo sobre a placa driver.
5.1.4.Conversor analógico digital
O Microcontrolador é equipado com um conversor analógico digital de 12
bits. O conversor possui oito entradas analógicas externas que são multiplexadas
internamente. No caso da carga eletrônica DC as entradas de A0 a A3 são utilizadas para
leitura das saídas dos sensores de corrente e as entradas de A4 a A7 são usadas para medir
a tensão de entrada nos módulos de potência.
Todas as entradas analógicas possuem um circuito para o condicionamento do
sinal e proteção das entradas, conforme o circuito da Ilustração 7.
VDD
D1
R1
Sinal externo
Entrada analógica
R2
D2
C1
Ilustração 7 – Circuito de condicionamento e proteção para entradas analógicas
Os diodos D1 e D2 são diodos schottky, ou seja, de condução rápida e baixa
queda de tensão quando polarizados diretamente. Os resistores R1 e R2 são resistores com
precisão de 1% para minimizar erros nas medidas.
Os resistores R1 e R2 são ajustados de maneira que a máxima amplitude
esperada do sinal externo não ultrapasse na entrada analógica o valor de VDD que é a
tensão de alimentação do MSP e a referência para o ADC. Caso alguma perturbação ocorra
no sinal externo e ele assuma um valor maior que VDD, o diodo D1 conduzirá e a tensão
na entrada analógica será pouco maior do que VDD. Caso o sinal externo assuma um valor
negativo o diodo D2 passará a conduzir protegendo a entrada analógica.
18
O capacitor C1 é um capacitor de aproximadamente 100nF e sua função é
implementar um filtro passa baixas, evitando que perturbações indesejadas de alta
freqüência no sinal externo ocorram na entrada analógica.
O ADC foi programado para operar no modo para converter repetidamente
uma seqüência de canais, O primeiro canal da seqüência é A0 e o último A7. Assim que é
terminada uma seqüência de conversões uma outra é iniciada, mantendo sempre atualizadas
as medidas de tensão e corrente de cada módulo.
5.1.5.Interface USART
Como já foi dito o MSP430F149 é equipado com duas interfaces USART,
universal
synchronous/asynchronous
receive/transmit,
que
são
utilizadas
para
comunicação serial de dados. Para a família na qual se encontra o MSP430F149 esta
interface pode ser configurada para operar no modo SPI ou no modo UART. E m outras
famílias do MSP430 ela pode ser configurada também no modo I2C.
O modo SPI, Synchronous Peripheral Interface, é utilizada para conectar o
MSP a um sistema externo através de três ou quatro fios, sendo que um deles é o sinal de
clock, já que esta é uma interface síncrona. Este modo não foi utilizado no projeto.
O Modo I2C, Inter IC Control, possibilita uma interface entre o MSP e
dispositivos gerenciáveis via interface I2C, através do barramento de dois fios I2C. Como
este modo de operação não está disponível no MSP430F149 e a interface I2C é necessária
para que o MSP se comunique com os sensores de temperatura. Este modo de operação foi
emulado em dois pinos de entrada/saída do MSP e sua utilização será descrita
posteriormente.
O modo UART, universal asynchronous receive/transmit, é utilizado para
conectar o MSP a um sistema externo através de apenas dois fios: um transmissor e um
receptor. Como é uma interface assíncrona, transmissão e recepção são eventos
independentes e não há um sinal de clock para sincronizar os dois sistemas. Portanto para
que a comunicação funcione os dois sistemas precisam operar com as mesmas
configurações. Este modo foi usado para implementar as interfaces RS-232 e RS-485.
5.1.5.1. Interface RS-232
19
A EIA, Eletronics Industries Alliance, padronizou no RS-232 apenas as
características elétricas dos sinais e a numeração dos pinos. O conector tipo D, o uso de
código ASCII, o formato dos dados e a comunicação assíncrona não são parte do RS-232,
apesar de serem comumente utilizados.
O padrão RS-232 estabelece comunicação serial com dois fios, full duplex,
ponto a ponto. No modo de comunicação UART, caracteres são enviados um a um como
um conjunto de bits. A codificação mais comumente usada é o start-stop assíncrono que
usa um bit de inicio, seguido por sete ou oito bits de dados, possivelmente um bit de
paridade, e um ou dois bits de parada sendo, então, necessários 10 bits para enviar um
caractere. Na Ilustração 8 podemos observar o formato do caractere UART.
Ilustração 8 – Formato do caractere RS-232.
Para este projeto a UART foi configurada para uma taxa de transmissão de
9600 bits por segundo, paridade ímpar, um stop bit, e oito bits de dados.
Como os níveis lógicos na USART do MSP e no padrão RS-232 são diferentes um circuito
integrado foi usado para realizar o condicionamento do sinal.
Na USART o nível lógico 1 é +3,3V e o nível lógico 0 é 0V, enquanto no sinal RS232 o nível lógico 1 é -10V e o nível lógico 0 é +10V. O transceiver MAX232 da
MAXIM faz a conversão do sinal tanto do lado do microcontrolador quanto do lado
externo. Na Ilustração 9 podemos observar o circuito integrado MAX232 e seu diagrama
interno.
20
Ilustração 9 – MAX232
5.1.5.2.Interface RS-485
A EIA, Eletronics Industries Alliance, padronizou no RS-485 apenas as
características elétricas do transmissor e receptor e não especifica ou recomenda nenhum
tipo de protocolo. RS-485 possibilita configuração de uma rede local barata e links de
comunicação multi ponto. A interface oferece altas velocidades na transmissão de dados,
35Mbits/s até 10m e 100kbits/s até 1200m. Como são usadas linhas de transmissão
diferencias balanceadas, podem alcançar longas distâncias.
Ilustração 10 – CI SN75176
A Ilustração 10 mostra o transceiver bidirecional SN75176 utilizado para
implementar uma rede RS-485 utilizando-se a interface USART do MSP.
21
Como podemos notar na figura, as linhas de transmissão A e B são linhas de transmissão
diferencias balanceadas. O que define o nível lógico do dado é a diferença de tensão entre
as linhas. A diferença deve ser de pelo menos 0,2V e a tensão aplicada nas linhas pode ser
de -10V a +15V. Os pinos DE e RE habilitam transmissão e recepção respectivamente e
podem ser conectados juntos e utilizados como direção de comunicação. Os pinos D e R
são transmissor e receptor do lado do MSP, respectivamente.
5.1.6.Master I2C
Uma interface I2C é necessária para que o MSP se comunique com os
sensores de temperatura. Como a USART do MSP430F149 não permite configuração no
modo I2C esta interface foi emulada utilizando-se dois pinos do MSP. Como já foi dito, a
interface I2C estabelece comunicação síncrona entre dispositivos através de dois fios. Em
uma rede I2C sempre há um dispositivo master e um ou vários dispositivos slave. Os dois
fios são conectados a todos os dispositivos formando um barramento. Cada dispositivo
slave é identificado por um endereço configurado por hardware . A ssim o máster pode se
comunicar com qualquer um dos slaves independentemente enviando no barramento o
endereço do dispositivo com o qual deseja se comunicar. Um dos pinos é o pino de dado.
Este pino é bidirecional, portanto usado para a transmissão de dados tanto pelo máster
quanto pelos slaves. O outro pino é o pino de clock e é controlado pelo máster.
Apesar de cada dispositivo possuir seus próprios comandos, a maneira como estes
comandos são enviados é padrão e segue o seguinte esquema:
O dispositivo máster ajusta a condição inicial;
O dispositivo máster envia 7 bits de endereçamento;
O dispositivo máster envia o oitavo bit que indica que será feita uma operação de escrita
ou leitura.
O dispositivo slave envia um sinal de ACK;
O dispositivo máster/slave envia pacotes de 8 bits de dados sempre aguardando um ACK
do dispositivo slave/máster confirmando a recepção.
Caso seja o último pacote, o dispositivo máster encerra a comunicação.
Na Ilustração 11 podemos observar o diagrama deste protocolo.
22
Ilustração 11 – Protocolo I2C.
5.1.7.Display
Para o projeto da HMI foi utilizado um display alfa-numérico de 2 linhas e 20
colunas. O LCD é utilizado para que o operador possa configurar manualmente o
equipamento, navegar entre os menus e fazer leituras de medidas.
Na Ilustração 12 podemos ver parte do circuito usado para fazer a interface
entre o MSP e o LCD.
23
VDD >>>>> VCC
U1A
MC74HC244AN
1
2
4
6
8
{
LCD_RS
LCD_R/W
LCD_E
VCC
20
A1
A2
A3
A4
Y1
Y2
Y3
Y4
VDD
GND
18
16
14
12
VCC
10
50k
SN74LVC4245A
2
DIR
A8
A7
A6
A5
A4
A3
A2
A1
10
9
8
7
6
5
4
3
1
VCC
GND
GND
GND
23
24
B8
B7
B6
B5
B4
B3
B2
B1
VDD
VDD
{
LCD
Dados
14
15
16
17
18
19
20
21
DPY1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
1
VEE
U3
LCD_D7
LCD_D6
LCD_D5
LCD_D4
LCD_D3
LCD_D2
LCD_D1
LCD_D0
VCC
P1
13
12
11
LCD
Controle
OE
VDD
VL
RS
R/W
E
D0
D1
D2
D3
D4
D5
D6
D7
A
K
VSS
DISP LCD OCM-162
VDD
VCC
VCC
VDD <<<>>> VCC
Ilustração 12 – Interface entre MSP e LCD.
Para a interface com o display são usados sinais de controle e sinais de dados.
Os sinais de controle são unidirecionais, apenas do MSP para o LCD. Como o
LCD é alimentado com 5V e não identifica sinais de 3,3V, que é a tensão de alimentação do MSP,
como sendo nível lógico alto, um buffer foi utilizado para fazer a interface. O buffer
identifica os sinais do MSP de 3,3V em sua entrada como sendo nível lógico alto e como é
alimentado com 5V, coloca na saída 5V que é o nível adequado ao LCD.
Os sinais de dados ocupam uma porta do MSP e são bidirecionais, ou seja,
são utilizados tanto pelo MSP quanto pelo LCD para o envio de dados. Para fazer a
interface foi utilizado um buffer bidirecional. A direção do buffer é controlada pelo sinal
R/W ( read/write), através do qual o MSP indica se será feita uma operação de escrita ou
leitura no LCD. Quando está sendo feita uma escrita, os sinais de 3,3V do MSP passam
para o lado do LCD com 5V. Quando é feita uma leitura, os sinais de 5V do LCD passam
para o lado do MSP com 3,3V. Neste caso a porta do MSP é configurada como leitura.
O potenciômetro P1 é utilizado para ajustar o contraste do LCD.
5.1.8.Teclado
24
Para possibilitar ao operador navegar entre os menus foi projetado um teclado
com seis botões. O circuito para o teclado é bastante simples e pode ser observado na
ilustração 13.
VDD
S1
SW-PB
S2
SW-PB
S3
SW-PB
S4
SW-PB
S5
SW-PB
S6
SW-PB
S1
S2
S3
S4
S5
S6
}
Entradas
Digitais
Teclado
R12 R13 R14 R15 R16 R17
4K7 4K7 4K7 4K7 4K7 4K7
Ilustração 13 – Circuito do teclado.
Quando uma das teclas é pressionada o nível lógico no pino do MSP
configurado como entrada passa a ser 1 identificando que a tecla foi pressionada.
Considerações sobre como o teclado é lido serão feitas no capítulo 7.
5.1.9.Rotary encoder
Para facilitar algumas funções de navegação foi incluído na HMI um rotary
encoder, que é uma chave digital giratória com dois pinos de saída, através
dos quais o firmware é capaz de identificar para que lado o rotary encoder está sendo
girado. O rotary encoder é usado por funções onde há valores que precisam ser
configurados pelo usuário. Q uando o usuário gira para a direita o valor é incrementado e
quando gira para a esquerda o valor é decrementado.
5.2. Placa driver
25
A placa driver é mecanicamente acoplada no módulo de potência através de
um conector de potência e comunica-se com a placa controladora através de um cabo flat.
O circuito básico driver de corrente está representado na ilustração 14.
12V
12V
RLY1
R1
4k7
D1
1N4148
12V
Acionamento
RELAY-SPDT
Fonte +
CN1
R3
3
R6
3k9
VCC
2
3
C1
470uF
3
2
4k7
Q4
Q3 1
1
3
1
Sinal PWM
2
Q1
TIP-142
1
P1
Pot 1
Q2
BC337
1
CON-01
2
R4
1k5
100R
R5
R7
10R
R2
10R
Módulo
De
Potência
U1
1
3
Saída sensor
2
VCC Ip+
4
OUT
GND Ip-
CN2
5
ACS750xCA-100
1
CON-01
Fonte -
Ilustração 14 – Circuito driver de corrente
Para explicar o funcionamento do circuito é necessário fazer algumas
considerações:
O relê RLY1 é usado para polarizar Q1;
Q1 trabalha na região ativa;
Q2 trabalha em corte e saturação;
Q3 e Q4 exemplificam a arquitetura do módulo de potência;
U1 é um sensor de corrente;
R2 e R7 são resistores de potência;
O equipamento sob teste é conectado entre os terminais CN1 e CN2.
Consideremos primeiro a situação em que há um sinal de zero volts na base
de Q2, PWM com duty cicle de 0%.Qquando RLY1 for acionado ele polarizará o circuito de
Q1, e Q1 terá em sua base aproximadamente 8,5V,que é a tensão no divisor resistivo entre
R4 e R6. Esta é a condição em que Q1 terá a maior tensão em sua base e assim fornecerá o
26
máximo de corrente para as bases dos transistores do módulo de potência que por sua vez
conduzirão a corrente máxima.
Consideremos agora que um sinal de nível lógico 1, PWM com duty cicle de
100%, é aplicado na base de Q2. Q2 entrará no modo de saturação e o circuito se
comportará como se o resistor equivalente entre R3 e P1 fosse colocado em paralelo com
R6. Isto fará com que a resistência equivalente em R6 diminua e juntamente com ela a
tensão na base de Q1. Nesta situação a tensão na base de Q1 chega ao seu valor mínimo e
deve fazer com que Q1 entre em corte e, portanto pare de fornecer corrente aos transistores
do módulo que potência que também entrarão em corte.
A função do sinal PWM aplicado na base de Q2 é fazer com que a tensão na
base de Q1 varie entre o valor máximo e o valor mínimo, controlando a corrente que está
sendo drenada pelo módulo de potência.
Para que a tensão na base de Q2 não fique alternando entre o valor máximo e mínimo o
capacitor C1 de valor elevado é colocado em paralelo com R6. Ele evita variações de alta
freqüência na tensão e faz com que ela fique estável em um valor intermediário
dependendo do duty cicle do PWM.
Para ilustrar o funcionamento do circuito, admitimos que um sinal PWM como
o da ilustração 15 é aplicado na base de Q2. Q uando o sinal está em nível 1, Q2 satura
aplicando em C1 o valor mínimo de tensão. Quando o sinal vai para nível 0 Q2 entra em
corte e C1 fica exposto ao valor máximo de tensão. Variando-se o duty cicle do PWM
variamos o tempo que C1 fica exposto ao valor máximo e mínimo de tensão e após alguns
períodos T o capacitor se carrega com uma tensão entre o máximo e o mínimo.
1
0
T
Ilustração 15 – Exemplo de sinal PWM.
Em série com o módulo de potência é colocado um sensor de corrente que
funciona como uma realimentação para o sinal PWM. Quando a corrente atual no módulo
de potência é menor que a desejada, diminuímos o duty cicle do sinal PWM, o que causa um
aumento de corrente. O sensor de corrente é lido novamente e o procedimento repetido até
que se atinja a corrente desejada.
27
A Ilustração 16 é uma foto de osciloscópio. O sinal DC na parte superior é o
sinal na base de Q1 e tem seu valor medido na parte inferior da figura como Vbase(2)
1,75V. O sinal PWM é o sinal aplicado na base de Q2 e tem seu duty cicle medido como
duty cicle(1) 45,33%. Podemos compará-la com a Ilustração 17, onde o duty cicle do sinal
PWM foi diminuído para 18,66 %, causando um aumento na tensão na base de Q1 para
2,68V e consequentemente um aumento na corrente do módulo de potência.
Ilustração 16 – Tensão de base e sinal PWM
28
Ilustração 17 - Tensão de base após alteração no duty cicle.
5.3. Módulo de potência
A arquitetura do módulo de potência já foi apresentada na ilustração 14.
Para o módulo de potência utilizado atualmente são usados oito transistores
de potência cujas características estão Ilustradas na tabela 1.
Parâmetro
Tabela 1 - Valores máximos de operação do TBJ de potência
Valor
Unidade
Tensão coletor-emissor
140
[V] dc
Corrente de emissor
25
[A] dc
Potência a 25ºC
250
[W]
Queda acima de 25ºC
1,43
[W/ºC]
Temperatura de operação
-60 a +200
[ºC]
Na tabela 1 podemos observar que a potência máxima dissipada pelo
transistor varia de acordo com a temperatura do mesmo. Isto é controlado no firmware
lendo o sensor de temperatura e calculando-se qual a potência máxima do transistor em
29
dado instante. Caso esta potência seja excedida, o usuário recebe um alarme e a corrente no
módulo é automaticamente diminuída.
A Ilustração 18 é uma foto do módulo de potência, junto com a placa driver.
Para aumentar a troca de calor entre os transistores e o ar, eles foram parafusados ao
dissipador e, com intuito de aumentar a condução de calor entre os transistores e o
dissipador, a área entre eles foi coberta por paste térmica. Dentro do equipamento os
módulos são posicionados lado a lado na frente de ventiladores que realizam a convecção
forçada, aumentando a dissipação de calor.
Ilustração 18 – Foto Módulo de potência e placa driver.
30
6. ESTRUTURAÇÃO DO FIRMWARE
Neste capítulo será apresentada a estrutura básica do firmware e o modo
como foram projetadas as principais funções.
6.1. Estruturação dos dados
As principais variáveis utilizadas foram implementadas na forma de
estruturas. C ada módulo e cada grupo tem três tipos básicos de estruturas: estruturas de
alarmes, estruturas de medidas e estruturas de configuração.
Estes três tipos de estruturas não contém os mesmos tipos de variáveis para módulos e
grupos, porém sua função principal é a mesma.
Estruturas de alarmes contêm as variáveis utilizadas pelos alarmes como flags
e histerese de cada tipo de alarme.
Estruturas de medidas contem todas as medidas de determinado módulo ou
grupo, como corrente, tensão, temperatura e potência. As medidas dos grupos são obtidas
sempre a partir das medidas dos módulos que estão operando naquele grupo. Para isso
existe uma função no loop principal do firmware que verifica em que grupo os módulos
trabalham e realiza a atualização das medidas dos grupos. Caso o software de gerência do
equipamento estiver sendo usado, o MSP envia periodicamente para o software as
estruturas de medidas e as estruturas de alarmes.
Estruturas de configuração contêm os parâmetros configuráveis, como
máxima tensão, máxima corrente, grupo de trabalho e outras. As estruturas de
configuração podem ser alteradas pelo usuário e a cada alteração realizada elas são salvas
na memória flash de informação do MSP que é recuperada cada vez que o equipamento é
ligado. Caso o software de gerência estiver sendo usado, o usuário pode dar um comando
para que o software leia as configurações atuas no equipamento e caso o usuário queira
alterá-las, pode fazê-lo e depois executar um comando para que o software envie ao
equipamento as novas configurações.
6.2. A estrutura MMI
31
Com o intuito de facilitar a implementação dos diversos menus nos quais o
usuário pode navegar utilizando o teclado e, para que o firmware ficasse bem claro e
estruturado, as funções de HMI foram projetadas seguindo o modelo MMI. MMI significa
main machine interface e é basicamente uma máquina de estados. Toda tela do display é
um estado na máquina de estados e em cada estado as teclas têm uma função diferente que
está definida dentro daquele estado, o que permite ao usuário navegar entre estados. A cada
60m uma função denominada MMI é chamada no loop principal. Uma das vantagens deste
tipo da estrutura é que não é preciso fazer o debounce das teclas de forma independente, já
que a própria estrutura o faz. Observe na Ilustração 19 o fluxograma desta função.
Ilustração 19 – Fluxograma função MMI
6.3. A função Main
32
A função Main é o loop principal do firmware, um loop infinito. Na função
Main são executadas as funções de alto nível do firmware. Estas funções podem ser
observadas na Ilustração 20.
MAIN
Inicializa máquina
de estados
Contador MMI
estourou?
SIM
Flash já foi
gravada?
NÃO
Carrega
configuração padrão
Executa MMI
Salva na flash
Atualiza variáveis de
medidas dos grupos
SIM
Lê configuração
da flash
Configura Sensores
de temperatura
Atualiza sinal PWM
Configura alarmes
Controla Tensão,
corrente, potência e
temperatura dos módulos
Módulo presente?
Controla Tensão nos
grupos
NÃO
Próximo
módulo
SIM
Próximo
módulo
Calibra sensor de
corrente do módulo
Atualiza Leituras de
temperatura
Loop Infinito
NÃO
Flags de comunicação
setados?
SIM
Executa funções de
comunicação
33
NÃO
Ilustração 20 – Fluxograma da função MAIN
34
7. SOFTWARE DE GERÊNCIA
O software de gerência foi desenvolvido em plataforma LabWindows e se
comunica com o equipamento através de uma interface RS-232. O objetivo do software de
gerência é permitir a configuração prática e fácil do equipamento, bem como a leitura de
medidas de forma simplificada. O protocolo de comunicação usado entre o equipamento e
o software de gerência pode também ser implementado em qualquer outro equipamento
externo que necessite gerenciar a carga eletrônica. Para ilustrar a facilidade oferecida pelo
software de gerência podemos observar a ilustração 21, uma cópia da tela de configuração
dos grupos. Em uma única tela o usuário pode, através de um comando carregar, as
configurações atuais da carga eletrônica, alterá-las se desejar e em seguida enviar a nova
configuração à carga. Um processo que seria com certeza mais trabalhoso de ser feito
através da HMI, que possui recursos limitados.
Ilustração 21 – Tela de exemplo do software de gerência
35
8. ANÁLISE DE CUSTOS
A Tabela 2 é uma estimativa de custos para o equipamento, lembrando que os
custos para produção podem ser reduzidos.
Componente
Tabela 2 - Estimativa de custos para o equipamento
Quantidade/Equipamento
Custo aproximado
Módulo de potência
4
R$ 130,00
Placa driver
4
R$ 30,00
Placa controladora
1
R$ 150,00
Mecânica
1
R$ 200,00
Total
R$ 990,00
Na tabela 3 os preços das cargas eletrônicas Agilent com características
similares as do produto desenvolvido, lembrando que os preços estão em dólares e não são
levados em conta os impostos de importação.
Comparando as tabelas 2 e 3 podemos ver que o equipamento é
economicamente muito mais acessível do que as cargas que seriam adquiridas caso o
equipamento não tivesse sido desenvolvido.
Tabela 3 - Custo das cargas eletrônicas Agilent
Product
GPIB
Type
N3300A
Yes
N3301A
Yes
Input Voltage
Price
*
Input Current
Power
Mainframe 0-240 V
0-360 A
1,800 W from US$ 2,312
Mainframe 0-240 V
0-120 A
600 W
from US$ 1,965
Considerando que não é o objetivo do projeto implementar todos os recursos
disponíveis em cargas eletrônicas no mercado, mas sim apresentar uma solução
economicamente acessível e que cumpra os requisitos dos testes realizados, o custo do
projeto ficou entre os valores esperados e pode ser absorvido pelos clientes nos quais o
desenvolvimento foi focado.
36
9. CONCLUSÃO
Durante o processo de desenvolvimento o autor adquiriu conhecimento e
familiaridade com as áreas envolvidas no projeto. O protótipo desenvolvido serviu para
validar as idéias do projeto, para a realização de testes e constatações práticas. P ermitiu
também o desenvolvimento do firmware e a validação do software de gerência. O protótipo
será posteriormente integrado à bancada de testes de alternadores e apresentado à empresa
Gauss que avaliará se todas as funcionalidades necessárias à sua aplicação foram
implementadas. Dado o caráter flexível que o equipamento adotou, aplicações em áreas de
geração de potência para telecomunicações, testes de fontes e testes de equipamentos
automotivos tornaram-se viáveis. A partir do que foi exposto acima, o autor pode-se concluir
que o objetivo do projeto foi cumprido e os obstáculos encontrados durante o
desenvolvimento superados com sucesso.
Uma próxima etapa seria realizar um re-layout da placa controladora para
adaptá-la a este novo perfil do projeto. Na opinião do autor alguns recursos poderiam ser
adicionados ao equipamento como sinais para verificar a conexão entre placas, relês
poderiam ser instalados na placa controladora com o intuito de p a r a controlar
o
acionamento dos ventiladores. Também poderia ser instalado um relé onde o usuário possa conectar
um alarme externo como uma lâmpada ou uma sirene. Finalmente um buzzer poderia ser
adicionado ao circuito para gerar um alarme sonoro de modo a chamar rapidamente a
atenção do operador.
37
10. BIBLIOGRAFIA
[01]
SEDRA, Adel e SMITH, Kenneth. Microeletrônica. Editora Makron Books.
2000. São Paulo.
[2] ZELENOVSKY, Ricardo e MENDONÇA, Alexandre. PC: Um Guia Prático de
Hardware e Interfaceamento. 2002. Rio de Janeiro.
[3] SCHILDT, Herbert. C completo e total. Editora Makron Books. 1997. São Paulo.
[4] Granberg, Tom. Handbook of digital techniques for high speed design. Editora Prentice
Hall. 2004.
38