Universidade de Brasília - UnB
Faculdade UnB Gama - FGA
Engenharia Eletrônica
Automação de uma Bancada para Ensaios e
Testes De Frenagem
Autor: João Victor Avancini Guimarães
Orientador: Prof. Dr. Evandro Leonardo Silva Teixeira
Brasília, DF
2016
João Victor Avancini Guimarães
Automação de uma Bancada para Ensaios e Testes De
Frenagem
Monografia submetida ao curso de graduação
em (Engenharia Eletrônica) da Universidade
de Brasília, como requisito parcial para obtenção do Título de Bacharel em (Engenharia
Eletrônica).
Universidade de Brasília - UnB
Faculdade UnB Gama - FGA
Orientador: Prof. Dr. Evandro Leonardo Silva Teixeira
Brasília, DF
2016
João Victor Avancini Guimarães
Automação de uma Bancada para Ensaios e Testes De Frenagem/ João Victor
Avancini Guimarães. – Brasília, DF, 201661 p. : il. (algumas color.) ; 30 cm.
Orientador: Prof. Dr. Evandro Leonardo Silva Teixeira
Trabalho de Conclusão de Curso – Universidade de Brasília - UnB
Faculdade UnB Gama - FGA , 2016.
1. Palavra-chave01. 2. Palavra-chave02. I. Prof. Dr. Evandro Leonardo Silva
Teixeira. II. Universidade de Brasília. III. Faculdade UnB Gama. IV. Automação
de uma Bancada para Ensaios e Testes De Frenagem
CDU 02:141:005.6
João Victor Avancini Guimarães
Automação de uma Bancada para Ensaios e Testes De
Frenagem
Monografia submetida ao curso de graduação
em (Engenharia Eletrônica) da Universidade
de Brasília, como requisito parcial para obtenção do Título de Bacharel em (Engenharia
Eletrônica).
Trabalho aprovado. Brasília, DF, 20 de novembro de 2016:
Prof. Dr. Evandro Leonardo Silva
Teixeira
Orientador
Prof. Dr. Wellington Avelino do
Amaral
Convidado 1
Prof. Dr. Marcelino Monteiro de
Andrade
Convidado 2
Brasília, DF
2016
Este trabalho é dedicado à todos os alunos do curso de gradução em Engenharia
Eletrônica da Universidade de Brasília.
Agradecimentos
Em primeiro lugar agradeço a meus pais Rita de Cássia e Carlos e aos meus irmãos
Frederico, Pedro e Ana por todo esforço, dedicação e apoio ao longo dos anos.
Aos meus tios Maria Aparecida e Luís Henrique pelo acolhimento e suporte durante
minha graduação.
Ao meu orientador Prof. Dr. Evandro Leonardo Silva Teixeira por sua paciência,
apoio e ensinamentos dados ao longo da minha permanência na Universidade de Brasília.
Aos meus amigos Mairon, Phelippe e Joel pelo companheirismo ao longo do curso.
Aos professores Julia Peterle, Casé Marques, Patrícia Lovatti, Aline Demuner,
Graciela Ramos, Genildo Ronchi, Carmen Santos, Ricardo Fragelli, Adson Rocha, Eneida
Valdes, Renato Lopes, Gerardo Pizo, Cristiano Miosso, Gilmar Beserra, André Penna,
Fabiano Soarez, Gustavo Cueva, Richard Pearl, Josh Reynolds, Eleanor Baldwin, Steve
Hegarty, Wellington Amaral, Marcelino Andrade, Sebastién Rondineau e demais professores que tive o privilégio de conhecer ao longo dos anos.
"Ciência, meu jovem, é feita de erros, mas esses são erros que são úteis de serem feitos,
porque levam pouco a pouco a verdade"
— Júlio Verne
Resumo
Esse trabalho tem como objetivo realizar a automação de uma bancada para ensaios e
testes de frenagem. Já existem normas consolidadas para ensaios de frenagem, esse projeto
de pesquisa está focado no que diz respeito a SAE J2522 que aborda sobre ensaios de
frenagem em veículos de passeio. O foco maior do projeto está em garantir uma solução
resiliente para a bancada afim de tornar possível a aquisição de todas as informações
físicas relevantes assim como automatizar a execução do ensaio.
Palavras-chaves: Instrumentação Eletrônica. Ensaio de Frenagem. Simulação de Sistemas Automotivos.
Abstract
This paper aims to design the automation of a testbench for brake tests. There are already
consolidated standards rules for brake system testing, this research project is focused with
respect to SAE J2522 regulation that addresses on brakes tests on passenger vehicles. The
major focus of the project is to ensure a resilient solution for the testbench in order to
make possible the acquisition of all relevant physical information and to automate the
tests.
Key-words: Electronic Instrumentation. Brake Test. Automotive Systems Simulation.
Lista de ilustrações
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
1 –
2 –
3 –
4 –
5 –
6 –
7 –
8 –
9 –
10 –
11 –
12 –
13 –
14 –
15 –
16 –
17 –
18 –
19 –
20 –
21 –
Tensão de saída de Termopares (DESCONHECIDO, 2016b) . . . . . .
Medição Termopar (ECIL, 2016) . . . . . . . . . . . . . . . . . . . . .
Distensão (INSTRUMENTS, 2016a) . . . . . . . . . . . . . . . . . . .
Ponte de Wheatstone (INSTRUMENTS, 2016b) . . . . . . . . . . . . .
Crankshaft Position Sensor (REMAN, 2016) . . . . . . . . . . . . . . .
Sinal Sensor Magnético (DESCONHECIDO, 2016c) . . . . . . . . . . .
Acelerômetro Piezoelétrico (UK, 2016) . . . . . . . . . . . . . . . . . .
Esquemático Relê (TESCHLER, 2016) . . . . . . . . . . . . . . . . . .
ATmega238p (COORPORATION, 2011) . . . . . . . . . . . . . . . . .
Modelo Projeto de Sensoriamento e Atuação . . . . . . . . . . . . . . .
Esquema elétrico AD595 (DEVICES, 1997) . . . . . . . . . . . . . . .
Circuito Condicionador Termopar . . . . . . . . . . . . . . . . . . . . .
Amplificador Diferencial por Junta Comum (DESCONHECIDO, 2016e)
Esquemático INA125 (INSTRUMENTS, 1998) . . . . . . . . . . . . . .
Circuito Condicionador para Célula de Carga . . . . . . . . . . . . . .
Circuito Condicionador Sinal Rotação . . . . . . . . . . . . . . . . . .
Circuito de Condicionamento para Sinal de Vibração . . . . . . . . . .
Circuito de Interface para Entradas Digitais . . . . . . . . . . . . . . .
Curva característica transistor bipolar (DESCONHECIDO, 2016a) . .
Circuito de Interface para Acionamentos . . . . . . . . . . . . . . . . .
Transistor NPN (DESCONHECIDO, 2016d) . . . . . . . . . . . . . . .
33
34
34
35
35
36
37
37
38
45
46
48
49
49
50
51
52
53
54
54
55
Lista de tabelas
Tabela
Tabela
Tabela
Tabela
Tabela
1
2
3
4
5
–
–
–
–
–
Parâmetros de Pressão Teste Secção de Polimento
Valores de Temperatura Inicial para teste de Fade
Termopares e suas faixas de operação . . . . . . .
Saída AD595 (DEVICES, 1997) . . . . . . . . .
Cronograma de Atividades Futuras . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
29
31
34
47
58
Lista de abreviaturas e siglas
INMETRO
CONTRAM
Instituto Nacional de Meteorologia, Qualidade e Tecnologia.
Conselho Nacional de Trânsito
NBR
Norma Brasileira
SAE
Society of Automotive Engineers
CI
Circuito Integrado
GND
Ground
LED
Light Emitting Diode
CKP
Crankshat Position Sensor
TCC
Trabalho de Conclusão de Curso
RPM
Rotações por Minuto
EEPROM
Electrically Erasable Programmable Read-Only Memory
SRAM
Static Random Access Memory
𝐼2 𝐶
Inter-Integrated Circuit
Lista de símbolos
Ω
Ohms, unidade de resistência
kph
Quilômetros por hora
km/h
Quilômetros por hora
Pa
Pascal, unidade de pressão
M
106
k
103
g
9.8m/s
ms
10− 6 segundos
V
Volts
Vcc
Voltage Supply
Vo
Tensão de Saída
cv
Cavalos
L
Comprimento
D
Comprimento
Δ𝐿
Variação do Comprimento
kB
Quilo Bytes
Sumário
1
INTRODUÇÃO
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.1
Objetivos
1.2
Estrutura do Texto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2
REVISÃO BIBLIOGRAFICA . . . . . . . . . . . . . . . . . . . . . . 27
2.1
A Necessidade da realização do ensaio de frenagem . . . . . . . . . 27
2.2
Ensaio de Frenagem . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2.1
Definições e Especificações . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2.2
Ensaio de Características de Fricção . . . . . . . . . . . . . . . . . . . . . 28
2.2.3
Ensaio de Secção de Polimento . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2.4
Ensaio de Valor Característico 1 . . . . . . . . . . . . . . . . . . . . . . . 29
2.2.5
Ensaio de Sensibilidade à Pressão . . . . . . . . . . . . . . . . . . . . . . 29
2.2.6
Ensaio de Valor Característico 2 . . . . . . . . . . . . . . . . . . . . . . . 30
2.2.7
Ensaio de Frenagem Fria . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.2.8
Ensaio de Aplicações para Vias . . . . . . . . . . . . . . . . . . . . . . . . 30
2.2.9
Ensaio de Valor Característico 3 . . . . . . . . . . . . . . . . . . . . . . . 30
2.2.10
Ensaio de Fade 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.2.11
Ensaio de Recovery 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.12
Ensaio de Sensibilidade à Temperatura/Pressão 1 . . . . . . . . . . . . . . 31
2.2.13
Ensaio de Temperatura Crescente . . . . . . . . . . . . . . . . . . . . . . 31
2.2.14
Ensaio de Sensibilidade à Temperatura/Pressão 2 . . . . . . . . . . . . . . 31
2.2.15
Ensaio de Recovery 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.16
Ensaio de Fade 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.17
Ensaio de Recovery 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.3
Parâmetros a serem Monitorados . . . . . . . . . . . . . . . . . . . . 32
2.4
Estudo de Componentes . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.4.1
Termopares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.4.2
Células de Carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.4.3
Sensor de Velocidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.4.4
Acelerômetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.4.5
Relês . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.4.6
Microcontrolador ATmega328p . . . . . . . . . . . . . . . . . . . . . . . . 37
3
METODOLOGIA
3.1
Etapas do Estudo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.1.1
Etapa 1 - Revisão Bibliográfica . . . . . . . . . . . . . . . . . . . . . . . . 39
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.1.2
3.1.3
Etapa 2 - Definição do Problema . . . . . . . . . . . . . . . . . . . . . . . 39
Etapa 3 – Projeto do Sistmema . . . . . . . . . . . . . . . . . . . . . . . 39
4
4.1
4.2
4.3
4.3.1
4.3.2
4.3.3
PROJETO DO SISTEMA DE AUTOMAÇÃO
Requisitos Funcionais da Bancada . . . . . . .
Requisitos de Software . . . . . . . . . . . . . .
Componentes da Bancada de Frenagem . . .
Sensoriamento . . . . . . . . . . . . . . . . . . .
Atuadores . . . . . . . . . . . . . . . . . . . . . .
Demais componentes . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
41
41
41
42
42
43
43
5
5.1
5.2
5.3
5.4
5.5
5.6
DETALHAMENTO DO PROJETO DE SENSORIAMENTO E ATUAÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Canal de Aquisição do Sinal de Temperatura . . . . . . . . . . . . . .
Canal de Aquisição do Sinal de Pressão . . . . . . . . . . . . . . . . .
Canal de Aquisição do Sinal de Rotação . . . . . . . . . . . . . . . .
Canal de Aquisição do Sinal de Vibração . . . . . . . . . . . . . . . .
Canais de Entradas Digitais . . . . . . . . . . . . . . . . . . . . . . . .
Canais de Acionamentos . . . . . . . . . . . . . . . . . . . . . . . . . .
45
45
48
50
51
52
53
6
6.1
6.2
6.2.1
6.2.2
6.3
CONSIDERAÇÕES E TRABALHOS FUTUROS
Considerações . . . . . . . . . . . . . . . . . . . .
Trabalhos Futuros . . . . . . . . . . . . . . . . .
Hardware . . . . . . . . . . . . . . . . . . . . . . .
Software . . . . . . . . . . . . . . . . . . . . . . .
Prováveis Etapas Futuras do Projeto . . . . . .
57
57
57
57
57
58
REFERÊNCIAS
. . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
25
1 Introdução
Com o avanço da tecnologia os carros estão saindo de fábrica cada vez com mais
potência por preços mais acessíveis. Em 1995 o carro mais vendido (Volkswagen Gol Plus
1.0) possuía 49,8cv de potencia e acelerava de 0 a 100km/h em 22,4 segundos (CNW,
2016b) enquanto o carro mais vendido de 2015 (Chevrolet Onix LS 1.0) possui 80cv de
potencia e acelera de 0 a 100km/h em 13,3 segundos (CNW, 2016a). Essas melhorias no
desempenho acarretam obviamente em um aumento na velocidade dos mesmos, o que
exige cada vez sistemas de freio mais eficientes.
Testes de freio com veículos reais são obviamente muito custosos e inviabilizam
testes em pequenas escalas e aumentam significantemente o tempo requerido para cada
teste. Com o uso de ambientes simulados pode-se reduzir o tempo de desenvolvimento
e a quantidade necessária de provas práticas em projetos reais. A economia gerada pela
utilização de uma bancada de testes e simulação, poderia, por exemplo, ajudar a adoção
em massa de sistemas de freio mais eficiêntes (GARDINALLI, 2005). Isso de certa forma
já demonstra a utilidade e importância de uma bancada de ensaios.
Os ensaios de frenagem já são realizados há anos e são regulamentados há certo
tempo. Esse projeto será focado na regulamentação SAE J2522, que descreve como ensaios
de frenagem para veículos de passeio devem ser realizados. Essa norma é mundialmente
usada por diversos fabricantes de veículos e de componentes específicos para o sistema de
freio como discos, pastilhas, pistão, pinça entre outros.
1.1 Objetivos
O objetivo desse trabalho é o desenvolvimento de um sistema de instrumentação
eletrônica microcontrolado para o monitoramento e controle de uma bancada de ensaios
de frenagem de acordo com a norma SAE J2522.
1.2 Estrutura do Texto
Esse trabalho está organizado em seis capítulos, uma breve descrição dos mesmos
se encontra a seguir.
Capítulo 2: Faz uma revisão dos estudos necessários para desenvolvimento e comprensão desse trabalho, desde informações sobre os ensaios quanto a sistemas eletrônicos e
elementos sensoriais a serem utilizados. Possúi um foco no ensaio de frenagem em si, como
o mesmo é realizado, parâmetros necessários para sua realização, critérios de avaliação,
26
Capítulo 1. Introdução
detalhes de cada ensaio.
Capítulo 3: Traz uma breve descrição da metodologia adotada para a execução
desse trabalho.
Capítulo 4: Analisa o projeto como um todo, avaliando cada requisito e especificação do projeto individualmente. Tem como foco levantar tudo o que é relevante para
o escopo do projeto.
Capítulo 5: Faz uma avaliação individual dos canais de aquisição de grandezas
físicas, dos canais de atuação e propõe soluções para os mesmos.
Capítulo 6: Consideraçoes finais do estudo, sugestões para trabalhos futuros e
um breve cronograma de atividades.
27
2 Revisão Bibliografica
2.1 A Necessidade da realização do ensaio de frenagem
Evidentemente o sistema de freio é parte fundamental de um automóvel, pois
graças a ele é possível o uso do mesmo em condições seguras tanto em vias rurais e urbanas.
Existem alguns requisitos gerais que um sistema de freio deve cumprir (KAWAGUCHI,
2005):
∙ Reduzir a velocidade do veículo em movimento, aumentando a taxa de desaceleração
do mesmo.
∙ Parar o veículo completamente.
∙ Manter a velocidade do veículo, impedindo a aceleração não desejada durante o seu
trajeto em um declive.
∙ Manter o veículo estacionado quando este está completamente parado.
É importante ressaltar que essas condições são de certa forma ideias visto que em
condições extremas, de risco ou de falta o sistema pode não operar de maneira que irá
respeitar esses requisitos básicos. Visto a importância dos sistemas de freio é elementar
que os mesmos tenham qualidade mínima de capacidade de frenagem para que os veículos
possam ser desacelerados com maior eficiência. O sistema deve possuir qualidade suficiente
para garantir um menino de segurança, confiabilidade e boa operação.
Em contrapartida, sistemas mais eficientes acarretam em maiores custos para os
fabricantes e consequentemente para os consumidores e também para evitar que esses
parâmetros claramente subjetivos sejam interpretados erroneamente no projeto existem
normas regulamentadoras para esses sistemas para garantir um padrão mínimo de funcionamento. No Brasil quem estabelece essas normas é o Conselho Nacional de Trânsito
(CONTRAN) e o Instituto Nacional de Meteorologia, Qualidade e Tecnologia (INMETRO) juntamente com as normas técnicas NBR-10966 (Norma NB-1253), NBR-10967
(Método MB-3160), NBR-10968 (Método MB-3161), NBR-10969 (Norma NB-1254) e
NBR-10970 (Norma NB-1255) da Associação Brasileira de Normas Técnicas (ABNT),
que são baseadas em parte na regulamentação europeia ECE-13/05. (INMETRO, 2013)
Visto o grande número de normas regulamentadoras é visível a necessidade de
diversos ensaios para garantir que o sistema em questão esteja de acordo com os parâmetros objetivos estabelecidos pelas normas e que consequentemente isso proporcione maior
28
Capítulo 2. Revisão Bibliografica
segurança no trânsito. Muitas vezes um sistema pode aparentemente ser confiável e estar
de acordo com as normas, mas quando submetido a uma certa condição de risco pode
começar a apresentar faltas, e por isso é importante que seja realizado um ensaio onde o
sistema é exposto as mais diversas e extremas condições.
2.2 Ensaio de Frenagem
2.2.1 Definições e Especificações
Os ensaios de frenagem e todos os requisitos dos sistemas de frenagem são regidos
por um conjunto de normas estipuladas pelo CONTRAN e pelo INMETRO. Para ensaios
de frenagem com uso de pastilhas destinados a teste de equipamentos de passeio a norma
que geralmente é usada pelos fabricantes de veículos para determinar a eficiência de mecanismos de frenagem é a SAE J2522. A SAE (Society of Automotive Engineers) é uma
corporação que atualmente desenvolve padrões de organização e produção para diferentes
áreas da engenharia (SAE, 2016). A SAE J2522 tem como título: "Dynamometer Global
Brake Effectiveness" (Eficácia Global de Dinamômetros dos Freios), e visa criar um ponto
comum para o desenvolvimento, seleção e qualidade para sistemas de fricção e frenagem.
Essa norma define um Teste de Inercia por Dinamômetro que gera resultados relevantes
do comportamento eficaz de um material de de fricção no que diz respeito à temperatura,
pressão e velocidade. Abaixo está descrito o procedimento experimental ditado pela SAE
J2522 para sistemas com freios a discos, o objetivo principal desses testes é determinar
a eficácia do sistema de freio baseado na fricção. Fricção é basicamente uma perda de
energia cinética e momento linear entre dois corpos, também pode ser definida como a
razão de torque de saída por torque de entrada de um disco de freio.
2.2.2 Ensaio de Características de Fricção
Quando rotor chega a 80kph é aplicada uma frenagem com pressão de 3MPa até
que o sistema chegue a 30kph. Esse ensaio tem apenas um ciclo com trinta iterações. Na
primeira iteração os freios devem estar com temperatura inferior a 100𝑜 𝐶. Esse ensaio é
realizado diversas vezes ao final de outros ensaios geralmente variando a quantidade de
iterações, o mesmo é uma espécie de referência de funcionamento para o sistema.
2.2.3 Ensaio de Secção de Polimento
Semelhante ao ensaio anterior porém com seis ciclos de 32 iterações com pressão
variando. O valor de pressão para cada iteração é descrita pela Tabela 1, onde "It"é a
iteração e "P"é a pressão aplicada em MPa.
2.2. Ensaio de Frenagem
29
Tabela 1 – Parâmetros de Pressão Teste Secção de Polimento
It
1
2
3
4
5
6
7
P
1.5
3.0
1.5
1.8
2.2
3.8
1.5
It
8
9
10
11
12
13
14
P
2.6
1.8
3.4
1.5
2.6
1.5
2.2
It
15
16
17
18
19
20
21
P
3.0
4.6
2.6
5.1
2.2
1.8
4.2
It
22
23
24
25
26
27
28
P
1.5
1.8
4.6
2.6
1.5
3.4
2.2
It
29
30
31
32
P
1.8
3.0
1.8
3.8
Esse ensaio é muito importante para analisar como a temperatura e eficiência do
sistema varia de acordo com diferentes pressões de frenagem.
2.2.4 Ensaio de Valor Característico 1
É realizado um ensaio de Características de Fricção novamente somente que desta
vez com apenas um ciclo de seis iterações, com a intenção de verificar a variação das
características físicas e de operação do sistema.
2.2.5 Ensaio de Sensibilidade à Pressão
Semelhante ao ensaio de Características de Fricção, porém além da pressão de
freio variar os intervalos de velocidade também variam. São ao todo cinco ciclos cada um
com um intervalo de velocidade no qual o sistema é inicialmente submetido a um limite
superior de velocidade e a frenagem é aplicada até que o sistema atinja um limite inferior
de velocidade para o sistema ser acelerado novamente posteriormente. Os intervalos de
velocidade são os seguintes:
∙ 40kph até 5kph
∙ 80kph até 40kph
∙ 120kph até 80kph
∙ 160kph até 130kph
∙ 200kph até 170kph
Cada intervalo de velocidade é testado em um ciclo com oito iterações onde cada
iteração possui respectivamente as seguintes pressões de frenagem: 1Mpa, 2Mpa, 3Mpa,
4Mpa, 5Mpa, 6Mpa, 7Mpa e por ultimo 8MPa. Entre cada ciclo (intervalo de velocidade)
é necessário esperar até que o sistema esteja à um temperatura de no máximo 100𝑜 𝐶.
Esse ensaio é realizado com o intuito de avaliar como o sistema se comporta ao longo de
30
Capítulo 2. Revisão Bibliografica
todo espectro de velocidade em que um veículo é geralmente submetido, e assim garantir
qualidade em várias situações de aplicação. Assim como mesurar como essa variação de
velocidade de pressão de frenagem acarretam no desempenho e variação de temperatura
do sistema.
2.2.6 Ensaio de Valor Característico 2
É realizado um ensaio de Características de Fricção novamente somente que desta
vez com apenas um ciclo de seis iterações, com a intenção de verificar a variação das
características físicas do sistema.
2.2.7 Ensaio de Frenagem Fria
Sistema é acelerado até 40kph e posteriormente uma frenagem com pressão de
3MPa é aplicada até que essa velocidade seja menor que 5kph. Neste teste o sistema deve
estar inicialmente a uma temperatura menor que 40𝑜 𝐶.
Como o próprio nome já diz é usado para verificar o funcionamento do sistema quando o
mesmo se encontra em baixa temperatura.
2.2.8 Ensaio de Aplicações para Vias
Com o sistema a uma temperatura inferior a 50𝑜 𝐶 o mesmo é acelerado até 100kph
e posteriormente uma frenagem que proporciona uma desaceleração de 0.6g deve ser aplicada até que o sistema chegue a uma velocidade inferior a 5kph. O sistema é então
acelerado até 90% da velocidade máxima (de acordo com os requisitos do projeto até
180kph) e frenado com desaceleração de 0.6g até a velocidade chegue a 50% da velocidade
máxima (de acordo com os requisitos do projeto até 100kph).
O objetivo da realização deste ensaio é avaliar como o sistema reage em uma situação
mais fiéis a o que um veículo pode ser submetido em situação real em uma rodovia.
2.2.9 Ensaio de Valor Característico 3
É realizado um ensaio de Características de Fricção novamente somente que desta
vez com apenas um ciclo de 18 iterações, com a intenção de verificar a variação das
características físicas do sistema.
2.2.10 Ensaio de Fade 1
Nesse ensaio é realizado um ciclo com 15 iterações onde em cada uma dessas o
sistema é acelerado até 100kph e depois frenado até 5kph com desaceleração de 0.4g e
temperatura sendo variada em cada uma dessas iterações. A pressão máxima de frenagem
2.2. Ensaio de Frenagem
31
Tabela 2 – Valores de Temperatura Inicial para teste de Fade
It
1
2
3
4
5
T
100
215
283
330
367
It
6
7
8
9
10
T
398
423
446
465
483
It
11
12
13
14
15
T
498
513
526
539
550
para esse ensaio é de 16MPa. A Tabela 2 mostra quanto deve ser a temperatura inicial
em cada uma dessas iterações. "It"é o número da iteração e "T"é a temperatura inicial de
cada temperatura em 𝑜 𝐶.
O ensaio de fade é utilizado para determinar a fricção mínima que o sistema de
freio pode exercer em situações extremas.
2.2.11 Ensaio de Recovery 1
É realizado um ensaio de Características de Fricção novamente somente que desta
vez com apenas um ciclo de 18 iterações, com a intenção de fazer o sistema recuperar as
suas características padrões de ensaio.
2.2.12 Ensaio de Sensibilidade à Temperatura/Pressão 1
Muito semelhante ao ensaio de Secção de Polimento porém apenas com oito iterações onde em cada iteração é respectivamente aplicada as seguintes pressões de frenagem:
1Mpa, 2Mpa, 3Mpa, 4Mpa, 5Mpa, 6Mpa, 7Mpa e por ultimo 8MPa. Para esse ensaio a
temperatura inicial não deve ultrapassar os 100𝑜 𝐶. Ensaio utilizado para determinar a
sensibilidade da temperatura no sistema a partir da variação de pressão.
2.2.13 Ensaio de Temperatura Crescente
Nove iterações onde em cada uma o sistema é submetido a uma velocidade de
80kph de depois frenado até uma velocidade de 30kph com pressão constante de 3MPa
onde as temperaturas iniciais de cada iteração são respectivamente as seguintes: 100𝑜 𝐶,
150𝑜 𝐶, 200𝑜 𝐶, 250𝑜 𝐶, 300𝑜 𝐶, 350𝑜 𝐶, 400𝑜 𝐶, 450𝑜 𝐶 e 500𝑜 𝐶.
2.2.14 Ensaio de Sensibilidade à Temperatura/Pressão 2
Um Ensaio de Sensibilidade à Temperatura/Pressão é realizado com temperatura
inicial maior que 500𝑜 𝐶.
32
Capítulo 2. Revisão Bibliografica
2.2.15 Ensaio de Recovery 2
É realizado um segundo ensaio de recovery exatamente igual ao primeiro.
2.2.16 Ensaio de Fade 2
Um segundo Ensaio de Fade é realizado exatamente da mesma forma que o anterior.
2.2.17 Ensaio de Recovery 3
É realizado um terceiro ensaio de recovery exatamente igual aos dois anteriores.
2.3 Parâmetros a serem Monitorados
Segundo a norma SAE J2522 é obrigatório avaliar os parâmetros de temperatura, pressão e velocidade durante todo o ensaio. O parâmetro de vibração também será
adcionado como um parâmetro extra para gerar informações adcionais ao usuário.
∙ Temperatura da pastilha de freio: É importante durante todo o ensaio ter total
conhecimento da temperatura do sistema de freio, primeiramente pelo fator de segurança (existe uma temperatura máxima de operação para o sistema), também
pelo desgaste do sistema que está atrelado a temperatura no mesmo. Por último porém não menos importante está o fato de que conhecendo a temperatura é possível
realizar ensaios baseados na mesma, sendo possível conduzir ensaios em faixas de
temperatura conhecidas.
∙ Pressão: A pressão a ser medida é a pressão que o freio está exercendo no sistema
ao longo do tempo, conhecer a magnitude dessa força significa ter controle sobre o
quanto a temperatura aumenta de acordo com a frenagem e o quanto a velocidade
do rotor diminui em função da frenagem.
∙ Velocidade de Rotação: Sem conhecimento da velocidade do rotor seria impossível
determina determinar se o freio está sendo eficaz ou o quão eficaz ele é. O monitoramento de velocidade é o parâmetro mais crítico para o funcionamento do sistema,
sem o mesmo não existe utilidade ao resto do equipamento.
∙ Vibração: Outro fator interessante a ser medido no sistema é a vibração que é
gerada quando o freio entra em ação no sistema, não é fundamental para o ensaio
mais também é de natureza relevante. Vale lembrar que a vibração é sempre medida
em função da aceleração. Através desse parâmetro é possível avaliar a qualidade
2.4. Estudo de Componentes
33
da montagem/construção do sistema, verificar o deslocamento da pastilha e até
detectar faltas que podem ocasionar possíveis falhas no futuro.
2.4 Estudo de Componentes
Para a realização desse projeto foi necessário o estudo de alguns tipos de componentes específicos.
2.4.1 Termopares
Desde o seculo XIX já se sabe que a junção de dois metais diferentes excitados por
uma certa temperatura geram uma tensão elétrica, em teoria pode-se construir um termopar com a junção de quais queres metais diferentes, existem combinações normalizadas
em função de possuírem uma saída de tensão previsível e por suportarem grandes faixas
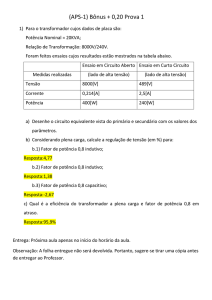
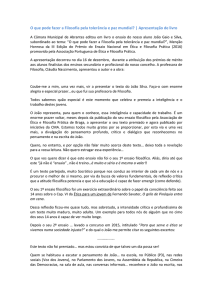
de temperatura. (POLLOCK, 1991)Existe uma relação entre a temperatura na junção
dos dois materiais e a tensão elétrica gerada porem a mesma não é linear, como pode ser
visto na Figura 1, onde E,J,K,T,R,S e B são diferentes tipos de termopares formados por
diferentes combinações de materiais.
Figura 1 – Tensão de saída de Termopares (DESCONHECIDO, 2016b)
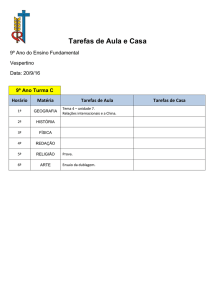
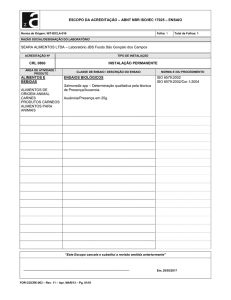
Como foi dito previamente, a junção de dois metais submetidos a uma temperatura
ira produzir uma tensão elétrica proporcional a essa temperatura. Embora isso pareca ser
muito pratico existe um problema, a tensão gerada é na verdade proporcional a diferença
entre a temperatura na junção dos metais (normalmente chamada de junta quente) e na
junta de referencia (também chamada de junta fria), isto é, se a junta quente for submetida
34
Capítulo 2. Revisão Bibliografica
a uma temperatura de 100o C e a junta fria estiver submetida a uma temperatura ambiente
de 25o C o termopar irá produzir uma tensão de saída proporcional a diferença entre as
juntas que no caso seria de 75o C. A tensão gerada só ira representar a real temperatura
na junta quente se a junta de referencia estiver em 0o C (KINZIE; RUBIN, 1973).
Figura 2 – Medição Termopar (ECIL, 2016)
Existem vários tipos comerciais de termopares, eles diferem nos metais que são
combinados na produção dos mesmos. Foi determinado que para esse projeto seriam usados termopares do tipo K (formados pela junção de duas ligas metálicas, Alumel e Cromel). Isso porque os termopares tipo K possuem uma ampla faixa de operação (-200o C 1250o C), ou seja de acordo com os requisitos não estarão trabalhando perto do limite em
momento algum, e porque assim como os termopares do tipo J são mais fáceis de serem
encontrados no mercado e possuem um custo menos elevado que outros tipos. A Tabela
?? mostra os tipos mais comuns de termopares e suas respectivas faixas de temperaturas.
Tabela 3 – Termopares e suas faixas de operação
Tipo do Termopar
J
K
E
T
Faixa de Operação (o C)
0 a 750
-200 a 1250
-200 a 900
-250 a 350
2.4.2 Células de Carga
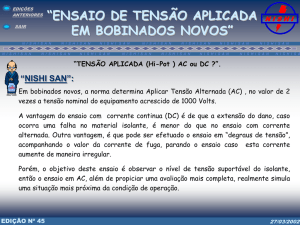
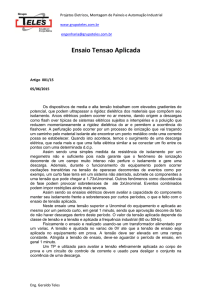
A célula de carga é um transdutor formado por strain gauges. Strain gauges são
dispositivos cuja resistência elétrica varia proporcionalmente a sua distensão. Distensão
é a quantificação da deformação adimensional de um corpo, também pode ser definida
como a mudança fracional do comprimento de um corpo. Distensão pode ser negativa
(compressão) ou positiva (tração).
Geralmente, a variação de comprimento em um strain gauge é muito pequena e
isso os torna muito susceptivos a erros de medição. Em função disso é muito comum o
2.4. Estudo de Componentes
35
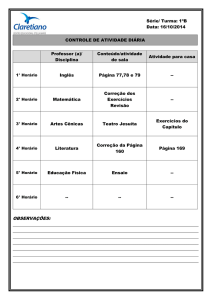
Figura 3 – Distensão (INSTRUMENTS, 2016a)
uso de uma ponte de Wheatstone, a mesma é formada por quatro braços resistivos e uma
tensão de excitação aplicada na ponte (WINDOW; HOLISTER et al., 1982).
Figura 4 – Ponte de Wheatstone (INSTRUMENTS, 2016b)
A tensão de saída 𝑉𝑂 pode ser obtida através da Equação 2.1 abaixo:
𝑉𝑂 =
𝑅3
𝑅2
−
𝑅3 + 𝑅4 𝑅1 + 𝑅2
(2.1)
2.4.3 Sensor de Velocidade
O elemento sensorial escolhido foi um sensor do tipo "Crankshaft Position Sensor"
(Sensor de Posição da Arvore de Manivela), mostrado na Figura 16.
Figura 5 – Crankshaft Position Sensor (REMAN, 2016)
Esse sensor é amplamente usado na industria automotiva para determinar a velocidade (RPM) de manivelas e engrenagens no motor. Existem vários tipos de sensores de
36
Capítulo 2. Revisão Bibliografica
CKP, os mais comuns são os do tipo de relutância variável pois possuem baixo custo e
boa precisão (SCHROEDER, 2002).
Os sensores de relutância variável, popularmente conhecidos como sensores magnéticos, são sensores passivos, isto é, não necessitam de alimentação para seu funcionamento.
A medida com que a engrenagem em questão gira cada dente da engrenagem se alinha
com o sensor, dessa forma um fluxo magnético na bobina do sensor muda pois o espaçamento de ar entre o sensor e a engrenagem muda. Essa mudança no campo magnético gera
induz um pulso de tensão na saída do sensor. Esse tipo de sensores possuem uma saída
de tensão analógica onde amplitude e frequência variam proporcionalmente a velocidade
de rotação de uma engrenagem. Com esse tipo de sensor se torna possível extrair dados
de velocidade linear, velocidade angular e posição angular. Todavia somente o dado de
velocidade angular (frequência) tem importância para esse projeto.
Figura 6 – Sinal Sensor Magnético (DESCONHECIDO, 2016c)
2.4.4 Acelerômetros
Um corpo é dito em vibração quando ele descreve um movimento oscilatório em
torno de um ponto de referência (FERNANDES, 2000). Para a medição de vibração em
máquinas é mais comum a medição da aceleração em função de g (9.8𝑚/𝑠2 ). A mesma
é medida em função de g em função do Princípio da Equivalência de Einstein, onde a
aceleração de um dado referencial não se distingui da ação gravitacional no mesmo. (JR,
1968)
Acelerômetros são sensores que medem aceleração própria, isto é, a aceleração que
o próprio sensor é submetido. Acelerômetros ão muito usados na indústria automotiva,
inicialmente apenas no sistema de Air Bag e atualmente até para o controle de estabilidade
veícular.
Atualmente os acelerômetros mais comuns são os baseados no efeito piezoelétricos,
esse efeito discreve a variação de força eletrostática ou de tensão elétrica em um material
2.4. Estudo de Componentes
37
quando submetido à uma força.
Figura 7 – Acelerômetro Piezoelétrico (UK, 2016)
Medindo essa variação de força eletrostático ou tensão elétrica é possível determinar a aceleração que o sensor foi submetido. Na Figura 7 podemos observar que existe
uma massa no sob o material piezoelétrico, dessa forma quando o sensor for submetido a
algum movimento, baseado no princípio da inércia a massa irá exercer uma força de tração ou compressão o que irá gerar uma varição de tensão na saída do sensor (PATRICK,
2007).
2.4.5 Relês
Um relê é um dispositivo que atua como um interruptor eletromecânico, o mesmo
é composto por três partes básicas: uma bobina, um conjunto de contatos e uma mola de
rearme como mostra a Figura 8. Quando uma corrente elétrica flui pela bobina, isso cria
um fluxo magnético que muda o estado do conjunto de contatos mudando assim a posição
da chave. Quando a bobina é desernegizada a mola de rearme volta a chave para o seu
estado natural. Os relês são usados para diversas aplicações na industria automotiva, pois
um relê permite que dois circuitos possam interagir sem existir transferência de corrente
elétrica entre eles, dessa forma circuitos de menor potência podem controlar circuitos de
maior corrente e vice-versa (KELLER, 1962).
2.4.6 Microcontrolador ATmega328p
O ATmega328p é um microncontrolador desenvolvido pela Atmel Corporation com
32kB de memória flash, 1kB de EEPROM, 32kB de SRAM e clock de 16MHz. Esse
microcontrolador é um dos mais usados em ambientes acadêmicos, principalmente após
o projeto Arduino onde a programação e utilização do mesmo se tornou mais didática e
fácil para alunos de nível médio e superior (ARDUINO, 2016). O ATmega328p possui seis
portas de entrada para tensão analógica com resolução de 10 bits e mais 14 portas digitais
38
Capítulo 2. Revisão Bibliografica
Figura 8 – Esquemático Relê (TESCHLER, 2016)
I/O. A tensão de operação de microcontrolador é de 1.8V até 5.5V (COORPORATION,
2011). O ATmega328p possui interface serial e interface 𝐼2 C fazendo com que o mesmo
seja muito versátil para diversos projetos. A Figura 9 mostra a pinagem desse dispositivo
em seu encapsulamento mais comum.
Figura 9 – ATmega238p (COORPORATION, 2011)
39
3 Metodologia
3.1 Etapas do Estudo
Para a realização desse projeto os trabalhos foram divididos em três etapas de
estudo para melhor desenvolvimento do mesmo.
3.1.1 Etapa 1 - Revisão Bibliográfica
Esta etapa pode ser considerada a mais importante de todo o trabalho, pois foram
revisados intensamente todos os conceitos fundamentais para iniciar a análise do problema
em questão. A etapa 1 percorreu todo o estudo, uma vez que mesmo nas etapas mais avançadas recorreu-se a materiais de apoio para sustentá-la. Na etapa de revisão bibliográfica
buscou-se os conceitos necessários para fundamentar o projeto, tais como, componentes a
serer utilizados para o projeto e estudos científicos para melhor compreenção do mesmo.
3.1.2 Etapa 2 - Definição do Problema
Esta etapa consistiu basicamente no delineamento do problema a ser estudado, ou
seja, quais os requisitos necessários para execução do projeto e quais questões relevantes
deveriam ser exploradas.
3.1.3 Etapa 3 – Projeto do Sistmema
Esta etapa consistiu na concepção, projeto e análise do sistema. O sistema teve
revisão individual dos seus módulos e propostas de soluções que mais adequadas para
atender todos os requisitos propostos na etapa anterior. Todas as soluções foram definidas
de acordo com necessidade e funcionabilidade visto que o objetivo desse projeto não é a
criação embrionária de cada módulo, apenas a junção de módulos que possam atender os
requisitos.
41
4 Projeto do Sistema de Automação
4.1 Requisitos Funcionais da Bancada
De acordo com especificações da norma SAE J2522 e segundo parâmetros considerados importantes foram definidos os seguintes requisitos funcionais para a bancada.
1. Medir uma pressão de frenagem de 1 até 16 MPa.
2. Exercer uma variação mínima de pressão de frenagem de no mínimo 300 kPa.
3. Medir uma temperatura de até 600𝑜 𝐶.
4. Medir termperatura com resolução de 7.5𝑜 𝐶.
5. Promover uma velocidade de 5kph a 200kph no rotor.
6. Medir a velocidade do rotor com resolução de 5kph, com valores variando entre 5kph
até 200kph.
7. O sistema deve ter um sampling rate de 50 ms.
8. O hardware do sistema deve ser capaz de trabalhar sob uma temperatura de até
40𝑜 𝐶.
9. O sistema deve ter dois canais de aquisição de temperatura.
10. O sistema deve ter dois canais de aquisição de pressão.
11. O sistema deve ter um canal de aquisição de velocidade.
12. O sistema deve ter um canal de aquisição de vibração.
13. O sistema precisa de pelo menos duas saídas digitais para controle de relês.
14. O sistema deverá microntrolado.
4.2 Requisitos de Software
Apesar de o foco principal dessa primeira parte do projeto estar no projeto de
soluções de hardware, foram previamente definidos alguns requisitos para o software do
sistema para evitar contradições e conflitos com o projeto de hardware.
1. O sistema deve ter uma taxa de amostragem de 50 ms.
42
Capítulo 4. Projeto do Sistema de Automação
2. O deve ser capaz monitorar cinco canais de aquisição analógica.
3. O sistema deve ser capaz de controlar o freio hidráulico e o motor trifásico simultaneamente.
4. O sistema não irá amostrar os resultados dos ensaios em tempo real.
5. O sistema precisa apenas mostrar em tempo real qual ensaio está realizando e informações relevântes como tempo de execução, tempo restante e possíveis faltas que
ocorreram durante ensaio.
6. O sistema deverá ser capaz de gerar um relatório de dados ao final do ensaio de
acordo com a norma SAE J2522.
7. O sistema deve ser capaz de armazenar os resultados do ensaio.
8. O sistema deve ser multiplataforma, isto é, ser executável em diversos sistemas.
9. O software precisa ter interface simples e fácil de operar visto que é um sistema
para fim acadêmico.
4.3 Componentes da Bancada de Frenagem
A bancada irá possuir diversas funções, as mesmas serão dividias de acordo com
suas funções.
4.3.1 Sensoriamento
∙ Temperatura: A bancada precisa de ser capaz de medir a temperatura em dois
pontos do sistema e para isso será necessário dois sensores de temperatura e consequentemente a bancada irá precisar de dois circuitos condicionadores para o sinal
desses sensores. Segundo a SAE J2522 um dos pontos deve ser no disco de freio e o
outro na pastilha.
∙ Velocidade de Rotação: Para monitorar a velocidade de rotação do sistema será
necessário um sensor de rotação e um circuito condicionador de sinais desse sensor
∙ Vibração: Será necessário um sensor de vibração e um circuito condicionador de
sinal de aceleração oriundo do sensor.
∙ Pressão: Também será preciso que a bancada seja capaz de medir a pressão exercida
em dois pontos do sistema e para isso será necessário dois sensores de pressão e
consequentemente a bancada irá precisar de dois circuitos condicionadores para o
sinal desses sensores.
4.3. Componentes da Bancada de Frenagem
43
∙ Entradas digitais: Não são críticas para o funcionamento do sistema porém ampliam a gama de funcionamento do mesmo. As entradas irão possuir circuitos de
condicionamento para que sejam ativadas por diferentes nível de tensão constante
na entrada mas que as tensões absolutas na saída desses circuitos sejam coerentes
com as entradas digitais do microcontrolador. Incialmente foi definido que o sistema
deverá ter quatro entradas digitais.
4.3.2 Atuadores
Relês: A bancada precisa de ser capaz de controlar dispositivos externos alimentados por corrente alternada e para isso serão necessário relês. Consequentemente para
esses relês serão necessários circuitos de ativação para acioná-los. É considerado crítico
para o sistema possuir uma dupla de relês com circuitos de ativação, mas para ampliar a
funcionalidade do mesmo foram definidos que serão implementados seis relês na bancada.
4.3.3 Demais componentes
∙ Microcontrolador: Coração do sistema, será usado para a aquisição de dados dos
sensores, acionar os atuadores e transmitir as informações para a camada superior
do sistema (software).
∙ Fonte: O sistema irá possuir uma fonte integrada para alimentar todos os circuitos,
sensores(caso necessário) e o microcontrolador. Será o último componente do sistema
a ser projetado visto que somente no final do projeto será possível determinar a
potência consumida por todo o sistema eletrônico.
45
5 Detalhamento do Projeto de Sensoriamento e Atuação
Baseado nas questões abordadas no capítulo anterior foi definido o modelo da
Figura 10 como uma solução para a arquitetura do projeto de sensoriamento de atuação.
Figura 10 – Modelo Projeto de Sensoriamento e Atuação
O microcontrolador usado no projeto será o ATmega328p (COORPORATION,
2011), suas vantagens e atributos já foram explicados no capítulo dois.
5.1 Canal de Aquisição do Sinal de Temperatura
Um dos parâmetros a serem monitorados é a temperatura do sistema e diferentes
pontos. A faixa de variação de temperatura descrita nos requisitos é de 0-600o C, existem
varias maneiras de medir/monitorar temperatura, em função do sistema possuir uma faixa
tão larga de temperatura o tipo de sensor mais adequado para esse monitoramento são
os termopares (POLLOCK, 1991).
O sinal gerado por um termopar necessita ser tratado de três formas:
46
Capítulo 5. Detalhamento do Projeto de Sensoriamento e Atuação
∙ Amplificação: O sinal tem uma amplitude muito baixa para os canais de aquisição
do microcontrolador e por isso necessita ser amplificado.
∙ Compensação junta fria: É necessário fazer uma compensação de junta fria, para
solucionar esse problema é necessário um segundo elemento sensorial para medir a
temperatura na junta fria e assim somar a tensão correspondente a essa temperatura
com a tensão do termopar, dessa forma a saída sera a temperatura real na junta
quente e não a diferença entre ambas as juntas.
∙ Linearização: como indicado na Figura 1, a tensão de saída do termopar não é linear,
com isso se torna necessário linearizar a saída para que a tensão de saida possa ser
convertida em uma temperatura em Celsius de maneira mais precisa.
Existem no mercado soluções encapsuladas para realizar o condicionamento do
sinal de um termopar, foi escolhido o CI AD595 da Analog Devices (DEVICES, 1997). O
mesmo é um amplificador de instrumentação completo com compensador de junta fria,
dentro do circuito integrado existe um sensor de temperatura que mede a temperatura
na junta fria e já realiza a compensação com a temperatura da junta quente. Além dessas
funções para facilitar a captura de dados o circuito integrado também realiza a linearização
da saida do termopar (ZHANG et al., 2006).
Figura 11 – Esquema elétrico AD595 (DEVICES, 1997)
A Tabela 4 mostra a tensão de saída do circuito integrado em função da temperatura que a junta quente de um termopar do tipo K é submetida.
Um problema que pode ser observado é que quando a temperatura medida é maior
que 500 o sinal de saída do AD595 sera maior que 5V (limite do microcontrolador escolhido) e para isso sera necessário acionar um circuito divisor de tensão para inserir um
ganho menor que unitário para reduzir proporcionalmente a tensão de saída. Foi utilizado
5.1. Canal de Aquisição do Sinal de Temperatura
47
Tabela 4 – Saída AD595 (DEVICES, 1997)
Temperatura (o C)
0
10
20
25
30
60
100
160
220
300
400
500
600
700
Tensão no Termopar (mV)
0
0.397
0.798
1.000
1.203
2.436
4.095
6.539
8.938
12.207
16.395
20.640
24.902
29.128
Tensão na saída do AD595 (mV)
2.7
101
200
250
300
605
1015
1620
2213
3022
4057
5107
6161
7206
um divisor de tensão com dois resistores de 100𝐾Ω para aplicar um ganho de 0.5 na tensão
de saída do AD595. Para obter maior confiabilidade do circuito foram usados resistores
de precisão. Uma outra função interessante do AD595 é o seu circuito de alarme, quando
o termopar não esta conectado ou é desconectado o circuito ira permitir a passagem de
corrente entre as portas 12 e 13 do circuito integrado. Isso sera usado nesse projeto ligando um o Vcc na porta 12 usando um LED e um resistor em serie, para complementar
a porta 12 sera conectada a uma das entradas digitais do microcontrolador e a porta do
CI conectada no GND. Dessa forma quando o termopar não estiver conectado o LED
sera ligado e o controlador sera notificado que o sensor não esta conectado. Outros quatro
elementos elementos foram acionados ao circuito final de condicionamento para melhorar
o seu funcionamento:
∙ Um resistor de pull-down conectando o terminal negativo do termopar no terra do
circuito: isso ajuda a reduzir o ruido elétrico capturado pelo termopar.
∙ Um capacitor entre o 𝑉𝐶𝐶 e o terra do CI: isso foi acionado apenas para melhorar
a estabilidade da alimentação do mesmo
∙ Um capacitor entre a saída do CI e o terra: esse capacitor atua como um filtro passabaixas e tem como função atenuar ruídos da saída e consequentemente melhorar a
precisão da medição de temperatura.
A Figura 12 mostra o circuito equivalente já com o CI AD595.
48
Capítulo 5. Detalhamento do Projeto de Sensoriamento e Atuação
Figura 12 – Circuito Condicionador Termopar
5.2 Canal de Aquisição do Sinal de Pressão
Um parâmetro muito influente em um sistema de frenagem é a pressão que o freio
exerce sobre o rotor. Pressão é uma grandeza medida em Pascal e pode ser expressada
pela razão da força pela área. Existem alguns sensores baseados no efeito piezoelétrico,
mas a maneira mais precisa de se aferir força é usando células de carga.
Em geral as células de carga apresentam níveis de saída muito baixos, da ordem de
2m/V, e por isso uma amplificação é fundamental. Não é necessário conhecer a natureza
dos strain gauges quando se está calibrando uma célula de carga pois geralmente os
fabricantes fornecem uma curva de calibração baseada nos sinais 𝑉𝑂 e 𝑉𝐸𝑋 da Figura 4,
vale ressaltar que esses sinais não podem possuir a mesma referencia, caso contrario não
será possível excitar a ponte de wheatstone corretamente. O circuito de amplificação mais
usado na engenharia de instrumentação é o amplificador diferencial por junta comum, o
mesmo (Figura 13) é muito estável e reduz significativamente o ruído do sinal de saída
(WAIT; HUELSMAN; KORN, 1975).
Apesar de ser uma configuração muito usada, montar esse amplificador usando
três amplificadores operacionais diferentes e sete resistências como na Figura 13 pode
torná-lo impreciso devido a imperfeições de fabricação dos componentes. Outro fator que
influencia muito o sinal de saída de uma célula de carga é a tensão de excitação de sua
ponte de wheatstone, caso a mesma varie demasiadamente a saída ira variar bastante
também, o que irá prejudicar sua calibração. Para solucionar esses dois problemas existe
uma solução muito usada no mercado que é o INA125 da Texas Instruments (FIALHO et
al., ), esse CI além realizar a amplificação do sinal também fornece uma fonte de excitação
muito precisa para a ponte de wheatstone, o único componente necessário a ser acoplado
5.2. Canal de Aquisição do Sinal de Pressão
49
Figura 13 – Amplificador Diferencial por Junta Comum (DESCONHECIDO, 2016e)
é um resistor 𝑅𝐺 , como mostra a Figura 14. Esse resistor irá determinar o ganho para a
amplificação de acordo com as Equações 5.1 e 5.2:
Figura 14 – Esquemático INA125 (INSTRUMENTS, 1998)
+
−
𝑉𝑂 = (𝑉𝐼𝑁
− 𝑉𝐼𝑁
)·𝐺
(5.1)
50
Capítulo 5. Detalhamento do Projeto de Sensoriamento e Atuação
𝐺=4+
60𝑘Ω
𝑅𝐺
(5.2)
Levando em consideração a sensibilidade de 2mV/V, isso significa que se a célula
for excitada com 10V, sua saída irá varia de 0 a 20mV. Como a entrada analógica do
microcontrolador escolhido (Atmega328) é de 0 a 5V, precisamos amplicar o sinal de
saída da célula com um fator de 250. Usando a Equação 5.2, para obter um ganho de
amplificação de 250 o valor de 𝑅𝐺 ideal seria de 243Ω, um resistor com esse valor não é
encontrado comercialmente, os mais próximos seriam de 240Ω e de 270Ω. O primeiro iria
fazer provocar um ganho maior que 250 e consequentemente uma tensão de saída do CI
maior que 5V quando a célula estivesse com tensão de saída de 20mV. O resistor 270Ω irá
gerar um ganho de 226 e fazer com que a saída do CI varie entre aproxima 0V e 4.52V,
usando 90.4% da resolução da entrada do microcontrolador.
A Figura 15 mostra o esquemático do circuito de condicionamento da célula de
carga com o CI INA125 da Texas Instruments.
Figura 15 – Circuito Condicionador para Célula de Carga
5.3 Canal de Aquisição do Sinal de Rotação
Para ensaios de frenagem, a necessidade de um eixo girando se torna fundamental, e
consequentemente conhecer e monitorar a velocidade de rotação do mesmo é fundamental.
5.4. Canal de Aquisição do Sinal de Vibração
51
A entrada do microcontrolador só aceita valores de tensão entre 0 e 5V, como
só existe interesse para capturar a frequência do sinal de saída do sensor a amplitude
pode ser modificada de qualquer maneira desde que a frequência não seja alterada. O
circuito de condicionamento possuirá dois diodos, o primeiro um diodo convencional para
ser polarizado diretamente e assim rejeitar a parte negativa do sinal. O segundo sera um
diodo zener e estará em polarização reversa. o diodo zener sera do modelo 1N4732A, o
mesmo possui uma tensão de polarização reversa de 4.7V (PEÑA, 2012). Dessa maneira o
segundo diodo ira rejeitar qualquer tensão maior que 4.7V e assim o sinal de saída sempre
sera mantido no intervalo de 0 a 4.7V. Os resistores tem apenas a função de limitar a
corrente do circuito enquanto o capacitor esta ligado como um filtro passa baixas onde tem
a função de reduzir o ruido do sinal de saída. Por fim foi adcionado um resistor de 100𝑘Ω
para regular a corrente do circuito. A Figura 16 mostra o circuito de condicionamento.
Figura 16 – Circuito Condicionador Sinal Rotação
Uma vantagem nesse canal de aquisição será que poderá ser usada uma entrada
digital do microncontrolador para esse circuito. Visto que só temos interesse na frequência,
podemos ligar isso direto em uma entrada digital e analisar essa frequência de acordo com
o que o circuito oscila entre nível lógico alto e baixo.
5.4 Canal de Aquisição do Sinal de Vibração
Apesar de não ser necessário para os ensaios de frenagem de acordo com a norma
SAE J2522, a aquisição do sinal de vibração tem utilidade para outras análises do teste
de frenagem. Em função da sua grande game de utilização já existem várias soluções para
a aquisição de sinais de aceleração, uma delas é o CI ADXL335 da Analog Devices. O
mesmo possúi três acelerômetros com sinal já amplificado e por isso se torna muito útil
para o projeto. Como quatro dos cinco canais analógicos do microcontrolador já estão
sendo utiliados para captura dos sinais de temperatura e pressão e o ADXL335 possúi
sinal de aceleração triaxial é necessário um multiplexador para alternar entre os sinais de
52
Capítulo 5. Detalhamento do Projeto de Sensoriamento e Atuação
acordo com a preferência do usuário. (DEVICES, 2010). A Figura 17 mostra o circuito
completo para a aquisição do sinal de aceleração.
Figura 17 – Circuito de Condicionamento para Sinal de Vibração
Na Figura 17 temos o ADXL335 já conectado ao multiplexador com saída para
o microncontrolador, também existem saídas do microcontrolador para selecionar qual
acelerômetro o mesmo quer ler o sinal. Todos os capacitores do circuito tem a mesma
função, a de reduzir o ruído do sinal tem uso recomendado pelo datasheet do ADXL335.
Os resistores R1,R2 e R3 são todos resistores de pull-down para garantir que a
5.5 Canais de Entradas Digitais
Inicialmente foi definido que o sistema não precisa de entradas digitais mas para
ampliar a gama de aplicação e operação do mesmo foram previstas quatro entradas digitais. O microcontrolador ATMEGA328p tem um padrão de nível lógico alto de 5V
(COORPORATION, 2011), porém muitas aplicações de alta tensão requerem maior nível
de tensão e por isso é necessário um circuito que permita que essa entrada digital permita
níveis de tensão maiores. O circuito da Figura 18 foi projetado para ampliar a gama de
níveis de tensão aceitos na entrada.
Esse circuito considera tem o papel de converter qualquer tensão maior entre 5
e 24V como nível lógico alto e abaixo de 5V como nível lógico baixo. Quando o nível
de tensão de entrada é maior que a tensão de threshold (próxima de 0.7V) o transistor
Q1 saí da região de corte e passa a conduzir corrente, como mostra a Figura 19. O diodo
5.6. Canais de Acionamentos
53
Figura 18 – Circuito de Interface para Entradas Digitais
zener D1 tem papel fundamental no circuito, o mesmo atua como um regulador de tensão,
sendo responsável por garantir que a tensão que polariza o transistor Q2 não será maior
que 5.1V e também limitan a saída do circuito nesse valor. Quando a tensão de entrada
é próxima de 0V ambos os transistores entram na região de corte e a tensão de saída
vai para 0V graças ao resistor de pull-down R3. Os resistores R1 e R2 tem apenas papel
de limitadores de corrente (NEUDECK, 1989). Esse circuito é muito versátil pois pode
funcionar com tensão de alimentação acima 5V. O circuito tem funcionamento seguro com
tensões de entrada de até 24V, tensões maiores poderiam induzir uma corrente muito alta
no circuito. Os transistores podem ser praticamente qualquer tipo de transistor NPN,
foram escolhidos transistores do modelo BC548 por serem muito comuns no mercado.
5.6 Canais de Acionamentos
Para o projeto são fundamentais pelo menos dois canais para acionamento de
componentes externos. O circuito para ambos canais de acionamento é o mesmo visto
que a única função desses circuitos é na verdade controlar o acionamento de um relê.
O relê não pode ser ligado diretamente no microcontrolador pois o microcontrolador é
incapaz de fornecer corrente suficiênte para polarizar a bobina do relê, em função disso
será necessário que o circuito tenha uma fonte externa de corrente controlada por uma
54
Capítulo 5. Detalhamento do Projeto de Sensoriamento e Atuação
Figura 19 – Curva característica transistor bipolar (DESCONHECIDO, 2016a)
saída digital do microcontrolador, para isso será usado um transistor NPN como mostra
a Figura 20.
Quando o microcontrolador manda uma tensão de nível lógico alto de 5V para o
circuito, o transistor saí da região de corte e passa a conduzir corrente, e consequentemente
uma corrente induzida pela fonte de tensão de 12V passa pela bobina do relê polarizandoa e mudando o estado da chave do mesmo. Quando o microcontrolador passa a manda
nível lógico baixo de 0V o transistor vai para a região de corte e para de conduzir corrente.
Esse efeito do transistor pode ser melhor observado na Figura 19 da página 54.
Figura 20 – Circuito de Interface para Acionamentos
No circuito da Figura 20 o resistor R2 serve para limitar a corrente que entra na
base do transistor para impedir que muita corrente seja drenada no microcontrolador.
5.6. Canais de Acionamentos
55
O resistor R1 serve como um resistor de pull-down, isto é, quando não existir tensão
produzida pelo microcontrolador este resistor irá garantir que a tensão de entrada do
circuito seja igual a zero. O diodo D1 serve para garantir que nenhuma corrente reversa
remanecente na bobina circule na direção contrária a ideal.
No transistor NPN, a corrente no emissor é uma soma das correntes que entram
na base e no coletor. Entretanto, a porção da corrente da base que vai pro emissor é
mínima e quase insiguinificante em relação a corrente que entra no emissor. Dessa forma
é necessária uma corrente muito pequena do micrcontrolador para polarizar o transistor
equanto a maior parte da corrente vem do coletor onde a mesma é oriunda de uma fonte
externa (NEUDECK, 1989). A Figura 21 motra os terminais de um transistor NPN.
Figura 21 – Transistor NPN (DESCONHECIDO, 2016d)
57
6 Considerações e Trabalhos Futuros
6.1 Considerações
O ensaio de frenagem é um elemento fundamental para a indústria automotiva,
graças ao mesmo é possível testar e avaliar a reação de um sistema de freio e até avaliar
o desgaste de alguns componentes. A existência de normas, como principalmente a SAE
J2522, facilita esse processo pois as mesmas unificam os testes e criam um padrão confiável
para os fabricantes de um paradigma de qualidade e bom funcionamento para um sistema
desse tipo.
Após um estudo sobre os principais componentes do hardware ficou evidente que
as medições necessárias a serem feitas não são apenas possíveis como também podem ser
feitas com excelente precisão, foram necessárias as combinações de diversas soluções para
tornar o sistema resiliente e preciso.
Esse estudo verifica a viabilidade do projeto de instrumentação eletrônica da bancada de ensaios de frenagem visto que é possível realizar as medições necessárias e o
controle dos sistemas respeitando todos os requisitos.
6.2 Trabalhos Futuros
6.2.1 Hardware
Será necessário primeiramente revisar todos os circuitos já propostos e realizar
testes de acordo com critérios mais rigorosos. Todos as soluções devem ser testadas simultaneamente afim de avaliar o funcionamento conjunto e dimensionar a fonte necessária
para alimentar todo o conjunto. Ao fim de todo o projeto e teste de todos os circuitos
iniciará o processo de confecção de uma placa de circuito impresso juntamente com uma
interface mecânica para alojar a placa de circuito impresso e todos os demais componentes
relevântes.
6.2.2 Software
O Software poderá ser dividido em três partes que devem ser realizadas em sequência:
1. Aquisição de Dados: Essa camada corresponde a operação de garantir que os
dados de todos os sensores estão sendo lidos todos simultaneamente de forma correta.
58
Capítulo 6. Considerações e Trabalhos Futuros
2. Simulação de Testes: Camada que corresponde a programar o sistema para realizar todos os testes de frenagem de acordo com a norma SAE J2522, e habilitar
operações para o usuário realizar alguns outros testes pré-programados, e ou realizar
algum teste em específico de acordo com a necessidade.
3. Geração dos Relatórios de Ensaio: Consiste em desenvolver uma ferramenta de
software que a partir dos dados coletados pelos sensores é capaz de desenvolver um
relatório dos ensaios de acordo com a norma SAE J2522 em formato gráfico que o
usuário do sistema possa usar para avaliar os resultados provenientes dos ensaios.
6.3 Prováveis Etapas Futuras do Projeto
Foi criado um breve cronograma de etapas e tarefas para a continuação desse
projeto mostrado na Tabela 5. Como o foco dessa primeira parte foi mais focado na
interface bancada-hardware é natural que a continuação do projeto esteja mais ligada a
camada de software como já era previsto no início do trabalho.
Tabela 5 – Cronograma de Atividades Futuras
Etapa
1
2
3
4
5
6
7
8
9
Tarefa
Desenvolvimento da Interface de Aquisição de Dados
Teste Soluções Individuais de Aquisição
Desenvolvimento de Plataforma para Gerenciamento dos Ensaios
Integração Plataforma de Aquisição e de Gerenciamento dos Ensaios
Teste Solução Conjunta
Dimensionamento de Fonte e Demais Componentes de Hardware
Fabricação de Hardware Completo do Projeto
Criação de Plataforma de Geração de Relatórios de Acordo com norma SAE J2522
Estudo de Caso
Pré-Requisito
1
2e3
4
2e3
6
2
5,7 e 8
59
Referências
ARDUINO. Arduino. 2016. Disponível em: <https://www.arduino.cc/>. Citado na
página 38.
CNW. Chevrolet Onix LS 1.0 Ficha Técnica. 2016. Disponível em: <http:
//www.carrosnaweb.com.br/fichadetalhe.asp?codigo=3396>. Citado na página 25.
CNW. Volkswagen Gol Plus 1.0 Ficha Técnica. 2016. Disponível em: <http:
//www.carrosnaweb.com.br/fichadetalhe.asp?codigo=431>. Citado na página 25.
COORPORATION, A. Atmel ATmega328P Datasheet. 2011. Citado 4 vezes nas páginas
15, 38, 45 e 52.
DESCONHECIDO. 2016. Disponível em: <https://qph.ec.quoracdn.net/
main-qimg-99874c39d682e5427ebf0f9a2c2e1cc9?convert_to_webp=true>. Citado 2
vezes nas páginas 15 e 54.
DESCONHECIDO. Curva de Variação da F.E.M dos Termopares. 2016. Disponível em:
<http://www.termopares.com.br/teoria_sensores_temperatura_termopares_curvas_
variacao_fem/curvas.gif>. Citado 2 vezes nas páginas 15 e 33.
DESCONHECIDO. Magnetic Cam Sensor Signal. 2016. Disponível em: <http:
//i287.photobucket.com/albums/ll154/arghx7/LGT_engine_speed2.jpg>. Citado 2
vezes nas páginas 15 e 36.
DESCONHECIDO. NPN Transistor Configuration. 2016. Disponível em: <https:
//bjttransistor.files.wordpress.com/2012/07/11.gif>. Citado 2 vezes nas páginas 15
e 55.
DESCONHECIDO. Typical instrumentation amplifier schematic. 2016. Disponível
em: <https://upload.wikimedia.org/wikipedia/commons/thumb/e/ed/Op-Amp_
Instrumentation_Amplifier.svg/400px-Op-Amp_Instrumentation_Amplifier.svg.png>.
Citado 2 vezes nas páginas 15 e 49.
DEVICES, A. „Monolithic Thermocouple Amplifiers with Cold Junction Compensation,
AD594/AD595 “. [S.l.]: Norwood:[sn], 1997. Citado 4 vezes nas páginas 15, 17, 46 e 47.
DEVICES, A. Adxl335: Small, low power, 3-axis±3 g accelerometer. ADXL335 Data
Sheet Rev B, Jan, 2010. Citado na página 52.
ECIL. Medição com Termopares. 2016. Disponível em: <http://www.ecil.com.br/
imagens/seedback2.jpg>. Citado 2 vezes nas páginas 15 e 34.
FERNANDES, J. C. Segurança nas Vibrações sobre o Corpo Humano. [S.l.], 2000. 11 p.
Citado na página 36.
FIALHO, L. F. L. et al. Simulação e projeto de células de carga. Citado na página 48.
60
Referências
GARDINALLI, G. J. Comparação do desempenho de frenagem simulada x experimental
de um veículo de passeio com freios hidráulicos e abs. Trabalho de Conclusão de Curso
apresentado à Escola Politécnica da Universidade de São Paulo para obtenção do título
de Mestre em Engenharia Automotiva, 2005. Citado na página 25.
INMETRO. Regulamento Técnico da Qualidade para Materiais de Atrito Destinados ao
Uso em Freios de Veículos Roviários Automotores. Rio de Janeiro, Brasil, 2013. 25 p.
Citado na página 27.
INSTRUMENTS, N. Definition of Strain. 2016. Disponível em: <http://www.ni.com/
cms/images/devzone/tut/a/83a1fe69763.gif>. Citado 2 vezes nas páginas 15 e 34.
INSTRUMENTS, N. Wheatstone Bridge Circuit. 2016. Disponível em: <http:
//www.ni.com/cms/images/devzone/tut/a/a28b553b1069.gif>. Citado 2 vezes nas
páginas 15 e 35.
INSTRUMENTS, T. Instrumentation Amplifier, With Precision Voltage Reference. 1998.
Citado 2 vezes nas páginas 15 e 49.
JR, K. N. Equivalence principle for massive bodies. ii. theory. Physical Review, APS,
v. 169, n. 5, p. 1017, 1968. Citado na página 36.
KAWAGUCHI, H. Comparação da análise de conforto de frenagem subjetiva x objetiva
de um veículo de passeio. São Paulo, Brazil, p. 101, 2005. Citado na página 27.
KELLER, A. Relays and switches. Proceedings of the IRE, IEEE, v. 50, n. 5, p. 932–934,
1962. Citado na página 37.
KINZIE, P. A.; RUBIN, L. G. Thermocouple temperature measurement. Physics Today,
v. 26, p. 52, 1973. Citado na página 33.
NEUDECK, G. W. The bipolar junction transistor. [S.l.]: Prentice Hall, 1989. v. 3.
Citado 2 vezes nas páginas 53 e 55.
PATRICK, W. L. The history of the accelerometer: 1920s-1996 - prologue and epilogue.
Ft. Worth - Texas, Estados Unidos da América, p. 9, 2007. Citado na página 36.
PEÑA, L. R. Circuitos con diodos. 2012. Citado na página 51.
POLLOCK, D. D. Thermocouples: theory and properties. [S.l.]: CRC press, 1991. Citado
2 vezes nas páginas 33 e 45.
REMAN, M. C. GM Replacement 10456042 Crankshaft Position Sensor. 2016. Disponível em: <http://ep.yimg.com/ay/motorcityreman/
general-motors-oe-10456042-crankshaft-position-sensor-1.gif>. Citado 2 vezes
nas páginas 15 e 35.
SAE. SAE. 2016. Disponível em: <http://www.sae.org/>. Citado na página 28.
SCHROEDER, T. Crankshaft position sensor. [S.l.]: Google Patents, 2002. US Patent
6,346,808. Citado na página 35.
TESCHLER, L. Typical Simplified Eletromechanical Relay Schematic. 2016. Disponível
em: <http://machinedesign.com/site-files/machinedesign.com/files/uploads/2014/07/
relay_diagram.gif>. Citado 2 vezes nas páginas 15 e 37.
Referências
61
UK, M. O. Compression Accelerometer. 2016. Disponível em: <http://www.
maintenanceonline.co.uk/maintenanceonline/content_images/figure-2(1).jpg>. Citado
2 vezes nas páginas 15 e 37.
WAIT, J. V.; HUELSMAN, L. P.; KORN, G. A. Introduction to operational amplifier
theory and applications. [S.l.]: McGraw-Hill Companies, 1975. Citado na página 48.
WINDOW, A. L.; HOLISTER, G. S. et al. Strain gauge technology. [S.l.]: Applied science
publishers, 1982. Citado na página 35.
ZHANG, R. et al. A tiny temperature measuring system employing thermocouple
amplifier ad595 [j]. Modern Electronics Technique, v. 1, p. 042, 2006. Citado na página
46.