FAED
Trabalho de Conclusão de Curso
ESTUDO SOBRE DIFERENTES TÉCNICAS DE
GERENCIAMENTO DE MEMÓRIA
Marcos Talau
Curso de Bacharelado em Sistemas de Informação
Dois Vizinhos, PR, Brasil
2005
FAED
Trabalho de Conclusão de Curso
ESTUDO SOBRE DIFERENTES TÉCNICAS DE
GERENCIAMENTO DE MEMÓRIA
Marcos Talau
Curso de Bacharelado em Sistemas de Informação
Dois Vizinhos, PR, Brasil
2005
ii
ESTUDO SOBRE DIFERENTES TÉCNICAS DE
GERENCIAMENTO DE MEMÓRIA
Marcos Talau
Trabalho
de
Conclusão
de
Curso
apresentado
ao
Curso
de
Bacharelado em Sistemas de Informação da Faculdade Educacional
de Dois Vizinhos – UNISEP (FAED/UNISEP, PR), como requisito
parcial para a obtenção do grau de Bacharel em Sistemas de
Informação
Curso de Sistemas de Informação
Dois Vizinhos, PR, Brasil
2005
iii
União de Ensino do Sudoeste do Paraná
Faculdade Educacional de Dois Vizinhos
Curso de Bacharelado em Sistemas de Informação
A Comissão Examinadora, assinada abaixo, aprova o Trabalho de
Conclusão de Curso
ESTUDO SOBRE DIFERENTES TÉCNICAS DE
GERENCIAMENTO DE MEMÓRIA
elaborada por
Marcos Talau
como requisito parcial para obtenção do grau de
Bacharel em Sistemas de Informação
COMISSÃO EXAMINADORA
_______________________________________
Giovani Motter
(Orientador)
_______________________________________
Fabio Alexandre Taffe
(Professor)
_______________________________________
Edivane Bellé
(Professora)
Dois Vizinhos, 07 de Dezembro de 2005
iv
Este trabalho é dedicado a minha Mãe, Tia e
avó.
v
AGRADECIMENTOS
Agradeço ao meu orientador Giovani Motter pelo apoio e dedicação
com meus estudos.
Meus agradecimentos também ao meu amigo Felipe Augusto van de
Wiel pelo fornecimento de informações a respeito do gerenciamento de
memória e o processo de desenvolvimento do Linux.
vi
LISTA DE FIGURAS
Figura 1: ENIAC (ETSI2, 2005).................................................................................................4
Figura 2: IBM PC AT (CHELLO, 2005).......................................................................................7
Figura 3: Arquitetura de um sistema operacional (SILBERSCHATZ et al., 2002)...................10
Figura 4: Sistema batch (TANENBAUM, 2003).......................................................................11
Figura 5: Overlay para um montador de dois passos (SILBERSCHATZ et al., 2000)..............23
Figura 6: A relação entre endereços virtuais e endereços físicos de memória (TANENBAUM e
WOODHULL, 2000)................................................................................................................25
Figura 7: (a) Um endereço de 32 bits com dois campos de tabela de páginas. (b) Tabelas de
páginas de dois níveis (TANENBAUM e WOODHULL, 2000)...................................................28
Figura 8: Tabela de página invertida (SILBERSCHATZ et al., 2000).......................................31
Figura 9: Swapping em memória virtual (MACHADO e MAIA, 2002).....................................33
Figura 10: Uma memória segmentada permite que cada tabela cresça ou escolha
independentemente das outras tabelas (TANENBAUM e WOODHULL, 2000).......................34
Figura 11: Visão de usuário de um programa (SILBERSCHATZ et al., 2000).........................35
Figura 12: Thrashing (SILBERSCHATZ et al., 2000)...............................................................37
Figura 13: Tela de opções do simulador TSM........................................................................54
Figura 14: Simulador TSM sendo executado com o algoritmo LRU.......................................54
Figura 15: Gráfico com algoritmos de alocação....................................................................57
Figura 16: Gráfico com algoritmos de páginas com 50 páginas...........................................59
Figura 17: Gráfico com algoritmos de páginas com 100 páginas.........................................59
Figura 18: Gráfico com algoritmos de páginas com 200 páginas.........................................60
Figura 19: Gráfico com algoritmos de páginas com 1000 páginas.......................................61
Figura 20: Gráfico com algoritmos de páginas com 2000 páginas.......................................61
Figura 21: Gráfico do algoritmo ARC (MEGIDDO e MODHA, 03/2003)...................................62
Figura 22: Gráfico do algoritmo CAR (BANSAL e MODHA).....................................................63
Figura 23: Gráfico do algoritmo CLOCK-PRO (JIANG et al.)....................................................64
Figura 24: Arquitetura de um kernel.....................................................................................66
vi
LISTA DE ABREVIATURAS E SIGLAS
ENIAC
DEC
FMS
LSI
DOS
SO
MIT
SMP
UCP
PDA
CE
LFU
PFF
LIRS
ARC
JOB
TSM
OPT
TLB
Electronic Numerial Integrator and Computer
Digital Equipament Corporation
Fortran Monitor System
Large Scale Integration
Disk Operating System
Sistema Operacional
Massachisetts Institute of Technology
Symmetric Multriprocessing
Unidade Central de Processamento
Personal Digital Assistant
Consumer Eletronics
Least Frequently Used
Freqüência de Falta de Páginas
Low Inter-reference Recency Set
Adaptative Replacement Cache
Trabalho
Talau Simulador de Memória
Ótimo
Translation Lookaside Buffers
vii
SUMÁRIO
1 INTRODUÇÃO.......................................................................................................................1
1.1 Objetivos____________________________________________________________________________2
1.1.1 Objetivo Geral..........................................................................................................2
1.1.2 Objetivo Específico..................................................................................................2
2 CONHECENDO A ÁREA.........................................................................................................3
2.1 Histórico das Gerações de Computadores____________________________________________3
2.1.1 1ª Geração...............................................................................................................3
2.1.2 2ª Geração...............................................................................................................4
2.1.3 3ª Geração...............................................................................................................5
2.1.4 4ª Geração...............................................................................................................6
2.2 SISTEMAS OPERACIONAIS____________________________________________________________8
2.2.1 O que é um sistema operacional?...........................................................................8
2.2.2 Tipos de sistemas operacionais.............................................................................10
3 GERENCIAMENTO DE MEMÓRIA.........................................................................................16
3.1 Introdução__________________________________________________________________________16
3.2 Monoprogramação__________________________________________________________________17
3.3 Multiprogramação__________________________________________________________________17
3.3.1 Partições de memória............................................................................................17
3.3.2 Swapping...............................................................................................................21
3.3.3 Memória virtual.....................................................................................................22
4 ALGORITMOS......................................................................................................................38
4.1 Alocação memória__________________________________________________________________38
4.1.1 Conceito................................................................................................................38
4.1.2 First-fit...................................................................................................................38
4.1.3 Best-fit...................................................................................................................39
4.1.4 Worst-fit.................................................................................................................39
4.1.5 Next-fit...................................................................................................................40
4.1.6 Quick-fit.................................................................................................................40
4.2 Algoritmos de substituição de páginas______________________________________________41
4.2.1 LRU........................................................................................................................41
4.2.2 LFU........................................................................................................................42
4.2.3 NUR.......................................................................................................................42
4.2.4 NFU........................................................................................................................43
4.2.5 MRU.......................................................................................................................43
4.2.6 Ótimo.....................................................................................................................44
viii
4.2.7 FIFO.......................................................................................................................45
4.2.8 SC..........................................................................................................................45
4.2.9 CLOCK....................................................................................................................46
4.2.10 WSCLOCK.............................................................................................................46
4.2.11 PFF.......................................................................................................................46
4.2.12 LIRS.....................................................................................................................47
4.2.13 ARC......................................................................................................................48
4.2.14 Clock-Pro..............................................................................................................49
4.2.15 CAR......................................................................................................................50
4.2.16 CART....................................................................................................................50
5 COMPARAÇÃO DOS ALGORITMOS......................................................................................52
5.1 Gráficos____________________________________________________________________________56
5.1.1 Simulador FITS.......................................................................................................56
5.1.2 Simulador TSM.......................................................................................................58
5.1.3 Outras pesquisas...................................................................................................62
6 CONCLUSÃO.......................................................................................................................65
6.1 Trabalhos Futuros___________________________________________________________________66
ix
RESUMO
Na história da computação mudanças ocorrem com vasta freqüência, surgem novas
tecnologias e novos dispositivos tudo isso para aplicar mais funcionalidade a esta grande
máquina. Todo computador ou sistema baseado nele, possui um componente vital para seu
funcionamento este é a memória. Como grande parte dos projetos de computadores foram
feitos com base na arquitetura de John Von Neumann, toda instrução para ser executada
antes deve estar presente na memória. Com esta importância e comprometimento aplicado
a ela, devem existir necanismos de hardware e software para facilitar este trabalho. A
técnica de gerencia de memória a ser escolhida para o sistema operacional deve ter parte
dela ligada ao projeto do hardware, para deixar este processo incessante mais rápido. A
camada de software da gerencia de memória atua no controle da camada de hardware da
memória. Este trabalho buscará uma revisão bibliográfica e comparação dos algoritmos de
gerenciamento de memória, bem como o desenvolvimento de um aplicativo simulador
destes algoritmos.
Palavras-chave: Gerenciamento de memória, Sistema Operacional, Algoritmos.
x
1
INTRODUÇÃO
Computadores são formados por circuitos eletrônicos denominados
hardware e por um conjunto de instruções inseridas em um nível de
abstração pelo usuário denominada software. O principal software de
qualquer computador é o sistema operacional.
De acordo com Tanenbaum (2003) o sistema operacional tem o
objetivo primordial de esconder a complexidade por traz do hardware do
usuário do sistema. O sistema operacional possui uma camada que esconde
o hardware do usuário, deixando ao usuário uma sensação de controle do
computador. Este software que trabalha com a máquina executando sempre
em modo supervisor, ou seja, o único com acesso completo aos recursos do
computador.
Uma das partes do sistema operacional que é mais utilizada é o
sistema de memória. Todos os drivers, programas e dispositivos tem que
manter um contato com a memória para poder funcionar adequadamente.
De acordo com Murdocca e Heuring (2000), a memória de um
computador é um conjunto de registradores com uma seqüência numérica.
A organização destes endereços é realizada de uma forma linear numerada,
o número que identifica um local de memória tem o nome de endereço.
Uma memória é dividida em diferentes partes pelo sistema operacional para
o controle e trabalho.
Devido a alta taxa de uso da memória e sua importância, é necessário
ter mecanismos extremamente rápidos para realizar suas tarefas, pois, se
um esquema de gerenciamento de memória for lento ou problemático todo
o sistema entra em declínio.
2
1.1 Objetivos
1.1.1 Objetivo Geral
O objetivo deste trabalho é realizar um levantamento bibliográfico do
gerenciamento de memória, realizar um estudo dos algoritmos de alocação
e substituição de páginas e por final desenvolver um simulador de memória.
1.1.2 Objetivo Específico
•
Documentar a evolução dos sistemas operacionais e tipos de sistemas
operacionais.
•
Realizar estudo sobre gerenciamento de memória.
•
Descrever os algoritmos de alocação de memória e substituição de
páginas de memória.
•
Desenvolver um software simulador de algoritmos de memória,
contendo um sistema virtual de memória para ser uma base aos
algoritmos de substituição de páginas.
Este trabalho terá como contribuição um estudo de sistemas de
memória e resultados através de gráficos sobre os algoritmos de alocação e
substituição de páginas de memória, tento como fator de análise o
problema da falta de páginas.
3
2
CONHECENDO A ÁREA
2.1 Histórico das Gerações de Computadores
2.1.1 1ª Geração
“O ENIAC (Computador e Integrador Numérico Eletrônico – Electronic
Numerial Integrator and Computer), projetado e construído sob a supervisão
de John Mauchly e John Presper Eckert na Universidade da Pensilvânia, foi o
primeiro computador eletrônico digital de propósito geral em todo o
mundo.” (STALLINGS, 2002, p. 19).
Segundo Stallings (2002) o ENIAC foi desenvolvido para fazer cálculos
balísticos para ser utilizado na segunda guerra mundial. Estes cálculos eram
feitos manualmente por um grande número de pessoas, isso demorava
muito tempo chegando até a dias, pois as equações eram muito complexas.
Mauchly e Eckert, um professor de engenharia elétrica da Universidade da
Pensilvânia e um aluno seu de pós-graduação tiveram a idéia de construção
desta máquina, eles conversaram com o exercito americano que apoiou a
proposta. Quando o ENIAC foi terminado ele pesava 30 toneladas, ocupava
um espaço de 140 metros quadrados e tinha 18 mil válvulas. Este
computador usava uma base decimal e possuía uma memória de 20
acumuladores cada um com uma capacidade e armazenamento de um
número decimal de dez dígitos decimais.
Um grande problema do ENIAC era que ele tinha de ser programado
totalmente de forma manual ligando e desligando cabos e chaves. Em 1946
quando este computador foi concluído já era muito tarde para ser usado na
segunda guerra mundial, mas o ENIAC serviu para ajudar a verificar a
viabilidade da bomba H. Em 1955 o ENIAC foi desativado. (STALLINGS,
2002)
4
Naquela época, um mesmo grupo de pessoas, construía, programava,
operava e realizava a manutenção de cada máquina. Toda a programação
era feita em código absoluto e muitas vezes conectando plugs em painéis
para controlar as funções básicas na maquina. Não havia linguagens de
programação (nem mesmo a linguagem de montagem existia). Os
sistemas operacionais também ainda não haviam sido inventados. O
modo normal de operação era o seguinte: o programador reservava
antecipadamente tempo de máquina em uma planilha, ia para a sala da
máquina, inseria seu painel de programação no computador e passava
algumas horas torcendo para que nenhuma das válvulas queimasse
durante a execução. Praticamente todos os problemas eram cálculos
numéricos diretos, como determinar tabelas de senos, co-senos e
logaritmos. No início da década de 50, esse processo havia se aprimorado
com a introdução de perfuradoras de cartões. Erra possível, então,
escrever programas em cartões e lê-los em lugar de painéis de
programação; de outra maneira o procedimento seria o mesmo.
(TANENBAUM, 2003, p. 05)
Figura 1: ENIAC (ETSI2, 2005)
2.1.2 2ª Geração
A primeira grande mudança nos computadores eletrônicos veio com a
substituição da válvula pelo transistor. O transistor é menor, mais barato e
dissipa menos calor do que a válvula e, assim como uma válvula, também
pode ser utilizado para a construção de computadores. Ao contrário da
válvula, que requer uso de fios, placas de metal, cápsula de vidro e vácuo,
o transistor é um dispositivo de estado sólido, feito de silício. O transistor
foi inventado na Bell Laboratories, em 1947, e iniciou uma revolução na
indústria eletrônica nos anos 50. Entretanto, apenas no final da década de
50,
computadores
totalmente
transistorizados
tornaram-se
comercialmente disponíveis. (STALLINGS, 2002, p. 27)
Conforme Stallings (2002) os computadores tinham as unidades lógica,
aritmética e unidade de controle mais complexa. Os computadores também
possuíam linguagens de programação de alto nível e incluíam software de
5
sistema. Nesta geração também surgiu a DEC, que lançou o PDP-1, que deu
inicio a era dos microcomputadores.
De acordo com Tanenbaum (2003) com o uso do transistor mudou o
cenário computacional radicalmente. Os computadores ficaram mais
confiáveis ao ponto de se funcionar por um longo tempo sem apresentar
anomalias e problemas. Nesta geração ocorreu uma separação exata entre
projetistas, fabricantes, programadores e técnicos de manutenção.
“Os grandes computadores de segunda geração foram usados, em sua
maioria, para cálculos científicos, como equações diferenciais parciais,
muito freqüentes na física e na engenharia. Eles eram preponderantemente
programados em FORTRAN e em linguagem de montagem. Os sistemas
operacionais típicos eram o FMS e o IBSYS, sistemas operacionais da IBO
para o 7094.” (TANENBAUM, 2003, p. 06)
2.1.3 3ª Geração
De acordo com Stallings (2002) na década de 50 e o início dos anos 60
os
equipamentos
eletrônicos
tinham
basicamente
os
seguintes
componentes discretos: transistores, resistores e capacitores. Estes objetos
eram fabricados separadamente e eram ligados através de cabos e também
com o uso de placas de circuito impresso. Tinha-se muita dificuldade para
lidar com transistores neste esquema, pois os computadores tinham
milhares de transistores.
“Em 1958, foi desenvolvida uma nova técnica que revolucionou os
equipamentos eletrônicos e iniciou a era da microeletrônica: a invenção do
circuito
integrado.
Esse
circuito
caracteriza
computadores.” (STALLINGS, 2002, p. 29)
a
terceira
geração
de
6
2.1.4 4ª Geração
Conforme Tanenbaum (2003) com a criação de circuitos integrados em
larga escala LSI nasceu à era dos computadores pessoais. Falando de
arquitetura os microcomputadores não de diferenciavam muito da classe
PDP-11, porém o preço era o grande diferencial, e com isso ouve uma
enorme venda de microcomputadores pessoais.
Em 1974 a Intel lança o 8080, um processador de 8 bits, porém faltava
um sistema operacional para ele. A Intel pediu a Gary Kildall escreve-lo,
Kildall tinha um sistema operacional baseado em disco denominado CP/M. O
CP/M não foi de muito agrado a Intel, Kildall então decidiu abri uma empresa
a Digital Research para trabalhar no CP/M. (TANENBAUM, 2003)
No início da década de 80 a IBM criou o IBM PC. A IBM precisava de um
sistema operacional para o seu computador, tentou entrar em contato com
a Digital Research que dominava o mundo dos sistemas operacionais na
época. A IBM entrou em contato com Kildall, ele tomou a pior decisão da
história dos negócios, recusou trabalhar com a IBM. Ainda assim a IBM
necessitava de um sistema operacional para seu computador, quando
entrou em contato novamente com Bill Gates, ele comprou o sistema
operacional DOS da empresa Seattle Computer Products e o forneceu a IBM.
Tempos depois a Microsoft contratou o criador do DOS Tim Paterson para
trabalha para ela. Assim nasceu a maior fortuna do mundo. (TANENBAUM,
2003)
7
Figura 2: IBM PC AT (CHELLO, 2005)
8
2.2 SISTEMAS OPERACIONAIS
2.2.1 O que é um sistema operacional?
O sistema operacional (SO) é o software que controla a execução de
programas memória, só podem ser executadas de modo rápido e eficiente
se o SO dispor de um suporte adequado do hardware do processador.
Quase todos os processadores dispõem desse suporte, em maior ou
menor extensão, incluindo hardware de gerenciamento de memória
virtual e de gerenciamento de processos. Isso inclui registradores de
propósito especial e áreas de armazenamento temporário, além de um
conjunto de circuitos para realizar tarefas básica de gerenciamento de
recursos. (STALLINGS, 2002, p. 240)
De
acordo
com
Tanenbaum
e
Woodhull
(2000),
os
sistemas
operacionais executam basicamente duas funções:
1ª
O
sistema
operacional
está
encarregado
de
fazer
toda
a
comunicação com o hardware, criando assim abstrações facilitar a vida do
programador.
"...O programa que esconde do programador a verdade sobre o
hardware e apresenta uma bela e simples visão de nomes de arquivos que
podem ser lidos e gravados é, naturalmente o sistema operacional..."
(TANENBAUM e WOODHULL, 2000, p. 19)
2ª O sistema operacional dispõe de um hardware para realizar
operações,o SO deve gerenciar os recursos que possui de uma forma
ordenada e estável.
...Os computadores modernos consistem em processadores, memórias,
temporizadores, discos, mouses, interfaces de rede, impressoras a laser e
uma ampla variedade de outros dispositivos. Na visão alternativa, o
trabalho do sistema operacional é oferecer uma alocação ordenada e
controlada dos processadores, das memórias e dos dispositivos de E/S
entre os vários programas que competem por eles.(TANENBAUM e
WOODHULL, 2000, p. 19)
Um sistema operacional moderno consiste em um ou mais processadores,
memória principal, discos, impressoras, teclado, monitor, interfaces de
9
rede e outros dispositivos de entrada e saída. Enfim, é um sistema
complexo. Desenvolver programas que mantenham o controle de todos
esses componentes e os utilizem corretamente de maneira otimizada é
um trabalho extremamente difícil. Por isso, os computadores têm um
dispositivo denominado sistema operacional, cujo trabalho é gerenciar
esses componentes e fornecer aos programas do usuário uma interface
com o hardware mais simples. (TANENBAUM, 2003, p. 1)
"Um sistema operacional, por mais complexo que possa parecer, é
apenas um conjunto de rotinas executado pelo processador, de forma
semelhante aos programas dos usuários. Sua principal função é controlar o
funcionamento dos seus diversos recursos, como processadores, memórias
e dispositivos de entrada e saída." (MACHADO e MAIA, 2002)
Um sistema operacional é um programa que atua como intermediário
entre o usuário e o hardware de um computador. O propósito de um
sistema operacional é fornecer um ambiente no qual o usuário possa
executar programas. O principal objetivo de um sistema operacional é
portanto o uso do sistema de computação conveniente. Uma meta
secundária é usar o hardware do computador de forma eficiente.
(SILBERSCHATZ et al., 2000, p. 3)
10
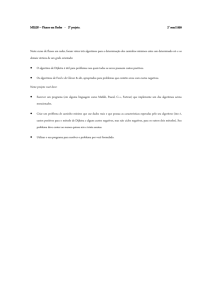
Figura 3: Arquitetura de um sistema operacional (SILBERSCHATZ et
al., 2002)
2.2.2 Tipos de sistemas operacionais
2.2.2.1Sistemas em lote
Segundo Silberschatz et al. (2000) os primeiros computadores tinham
como dispositivo de entrada leitoras de cartões e unidades de fita. O
usuário não podia interagir diretamente com este sistema. Para trabalhar
nestas máquinas era necessário introduzir os dados através de um cartão
perfurado. Os sistemas operacionais destes computadores ficavam sempre
residentes na memória, eles processam o JOB e mudava o controle para o
próximo JOB. Com o surgimento de discos o sistema operacional conseguia
armazenar os JOBS no disco, com isso, o SO realizava um escalonamento de
JOBS para realizar o processamento de JOBS mais rapidamente, pois poderia
utilizar
os
recursos
de
forma
mais
eficaz.
escalonamento de JOBS a multiprogramação flui.
Com
a
utilização
do
11
"Em sistemas batch, quando bem projetados, podem ser bastante
eficientes, devido à melhor utilização do processador; entretanto, podem
oferecer tempo de resposta longos. Atualmente, os sistemas operacionais
implementam ou simulam o processamento batch, não existindo sistemas
exclusivamente dedicados a este tipo de processamento." (MACHADO e
MAIA, 2002, p. 17)
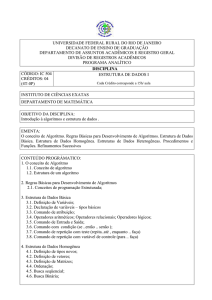
Figura 4: Sistema batch (TANENBAUM, 2003)
2.2.2.2Sistemas de tempo compartilhado
Segundo
Silberschatz
et
al.
(2000)
em
sistemas
de
tempo
compartilhado a CPU executa mais de um JOB, alterando o tempo de
execução entre eles. Nestes sistemas o usuário passa um comando e tem
uma resposta quase que imediata do sistema. Com um sistema de tempo
compartilhado vários usuários podem usar um computador ao mesmo
tempo, cada ação do usuário tende a ser curta assim um pequeno tempo de
CPU é o bastante para cada usuário. Estes sistemas são mais complexos
que
sistemas
operacionais
multiprogramados.
"...A
idéia
do
tempo
compartilhado foi demonstrada já em 1960, mas como os sistemas de
tempo compartilhado são difíceis e caros de construir, só se tornaram
comuns no início dos anos 70. Embora algum processamento batch ainda
ocorra, a maioria dos sistemas hoje é de tempo compartilhado..."
(SILBERSCHATZ et al., 2000, p. 7)
12
Os sistemas de tempo compartilhado (time-sharing) permitem que
diversos programas sejam executados a partir da divisão do tempo do
processador em pequenos intervalos, denominados fatia de tempo (timeslice). Caso a fatia de tempo não seja suficiente para a conclusão do
programa, esse é interrompido pelo sistema operacional e substituído por
um outro, enquanto fica aguardando por uma nova fatia de tempo. O
sistema cria um ambiente de trabalho próprio, dando a impressão de que
todo o sistema está dedicado, exclusivamente, para cada usuário.
(MACHADO e MAIA, 2002, p.17)
2.2.2.3Sistemas de computadores pessoais
Segundo Silberschatz et al. (2000) os computadores pessoais surgiram
nos anos 70, nesta época os sistemas operacionais não eram multiusuário
nem multitarefa. Estes sistemas foram evoluindo com o tempo trazendo
novos recursos e funcionalidades. Estes sistemas operacionais aproveitaram
muito a tecnologia dos sistemas operacionais de mainframes para utilizar
nos computadores pessoais. Um bom exemplo desta ação foi o caso do
MULTICS: o sistema operacional MULTICS foi criado no MIT e foi usado no
mainframe GE 645; Várias soluções que foram criadas para o MULTICS foram
adotadas para a criação do UNIX.
"Seu trabalho é fornecer uma boa interface para um único usuário. São
amplamente usados para processadores de texto, planilhas e acesso à
Internet. Exemplos comuns são o Windows 98, o Windows 2000, o sistema
operacional Macintosh e o Linux. Sistemas operacionais de computadores
pessoais são tão amplamente conhecidos." (TANENBAUM, 2003, p. 14)
2.2.2.4Sistemas paralelos
Segundo Silberschatz et al. (2000) sistemas paralelos possuem
múltiplos processadores, com o aumento do número de processadores,
estimasse que os trabalhos poderão ser realizados em menos tempo.
Sistemas
multiprocessados
tender
a
trazer
economia
de
dinheiro
comparados a vários sistemas de um único processador. Estes são mais
tolerantes a falhas do que os sistemas uniprocessador pois se um
13
processador parar o outro pode assumir toda a carga de processamento. Os
sistemas com múltiplos processadores são divididos em duas classes:
1ª Multiprocessamento simétrico: Ambos os processadores executam
uma cópia idêntica do sistema operacional. No processamento simétrico
(SMP) os processos são executados simultaneamente sem ocasionar
problemas. Este tipo de sistema deve ser criado com cuidado pois existe um
grande compartilhamento de recursos. Os sistemas operacionais: Windows
NT, Solaris, Digital UNIX, OS/2 e Linux suportam a tecnologia SMP.
2ª Multiprocessamento assimétrico: Nesta classe cada processador
recebe uma tarefa especifica, havendo um processador com a função de
mestre que envia instruções para os demais processadores.
Um modo cada vez mais comum de obter potência computacional é
conectar múltiplas CPUs em um único sistema. Dependendo precisamente
de como elas estiverem conectas e o que é compartilhado, esses sistemas
são denominados computadores paralelos, multicomputadores ou
multiprocessadores. Eles precisam de sistemas operacionais, mas muitos
deles são variações dos sistemas operacionais de servidores com
aspectos especiais de comunicação e conectividade. (TANENBAUM, 2003,
p. 14)
Os sistemas com múltiplos processadores caracterizam-se por possuir
duas ou mais UCP interligadas e trabalhando em conjunto. A vantagem
deste tipo de sistema é permitir que vários programas sejam executados
ao mesmo tempo ou que um mesmo programa seja subdividido em partes
para serem executadas simultaneamente em mais de um computador.
(MACHADO e MAIA, 2002, p. 18)
2.2.2.5Sistema de tempo real
Segundo Silberschatz et al. (2000) neste tipo de sistema o tempo é
super importante, ele é usado como uma forma de controle em uma
aplicação dedicada. Existem sensores que levam os dados até o
computador, para ser feita uma análise e provavelmente realizar um ajuste
para modificar a entrada dos sensores. Um processamento a ser efetuado
deve estritamente ser executado num limite de tempo, caso contrário o
14
sistema não executara totalmente seus objetivos. Existem dois tipos de
sistema de tempo real:
1º Sistema de tempo real crítico: Neste sistema deve haver uma
garantia que as tarefas sejam executadas a tempo, para realizar este
sistema uma série de características de sistemas operacionais devem ser
deixadas de lado, pois deve haver uma certeza sobre o tempo.
2º Sistema de tempo real não-crítico: As tarefas são divididas em
prioridade até serem totalmente concluídas. Esse sistema está inserido em
varias versões do UNIX.
Esses sistemas são caracterizados por terem o tempo como um
parâmetro fundamental. por exemplo, em sistemas de controle de
processos industriais, computadores de tempo real devem coletar dados
sobre o processo de produção e usá-los para controlar as máquinas na
fábrica. É bastante comum a existência de prazos rígidos para a execução
de determinadas tarefas. Por exemplo, se um carro está se movendo por
uma linha de montagem, certas ações devem ser realizadas em
momentos específicos. Se um robô soldados realiza seu trabalho - soldar muito cedo ou muito tarde, o carro está perdido. (TANENBAUM, 2003, p.
14)
"Nos sistemas de tempo real não existe a idéia de fatia de tempo,
implementada nos sistemas de tempo compartilhado. Um programa utiliza o
processador o tempo que for necessário ou até que apareça outro mais
prioritário. Essa importância ou prioridade de execução é definida pela
própria aplicação e não pelo sistema operacional, como nos sistemas de
tempo compartilhado." (MACHADO e MAIA, 2002, p. 18)
2.2.2.6Sistemas distribuídos
Segundo Silberschatz et al. (2000) ocorreram muitas mudanças nos
sistemas operacionais com o nascimento da Internet. Os sistemas
operacionais começaram a ter navegadores WEB, clientes de e-mail e
mecanismos de acesso a redes como os protocolos TCP/IP e PPP. Em
15
sistemas distribuídos os processadores se comunicam a través de linhas de
comunicação como linhas de comunicação de operadoras de telefonia.
2.2.2.7Sistemas operacionais de computadores de grande porte
"Os sistemas operacionais de computadores de grande porte são
sobretudo orientados para o processamento simultâneo de muitos JOBS,
sendo que a maioria deles precisa de quantidades prodigiosas de E/S. Estes
sistemas operacionais oferecem normalmente três tipos de serviços: em
lote (batch), processamento de transações e tempo compartilhado."
(TANENBAUM, 2003, p.13)
2.2.2.8Sistemas operacionais embargados
Um computador de mão ou PDA (personal digital assistant) é um pequeno
computador que cabe em um bolso de camisa e realiza um pequeno
número de funções como agenda e livro de endereços. Sistemas
embargados são executados em computadores que controlam dispositivos
que geralmente não são considerados como computadores, como
aparelhos de TB, fornos de microondas e telefones móveis. Eles têm,
muitas vezes, características de sistemas de tempo real, mas também
apresentam restrições de tamanho, memória e consumo de energia que
os fazem especiais. Exemplos desses sistemas operacionais são o PalmOS
e o Windows CE (Consumer eletronics). (TANENBAUM, 2003, p. 14)
2.2.2.9Sistemas operacionais de cartões inteligentes
Os menores sistemas operacionais são executados em cartões
inteligentes dispositivos do tamanho de cartões de crédito que contêm
um chip de CPU. Possuem restrições severas de consumo de energia e de
memória. Alguns deles podem realizar apenas uma única função, como
pagamentos eletrônicos, mas outros podem tratar múltiplas funções no
mesmo cartão inteligente. São comumente sistemas operacionais.
(TANENBAUM, 2003, p. 14)
16
3
GERENCIAMENTO DE MEMÓRIA
3.1 Introdução
A memória é um recurso importante que deve ser gerenciado com
cuidado. Enquanto o computador doméstico médio hoje em dia tem 50
vezes mais memória do que o IBM 7024, o maior computador do mundo
no início da década de 60, os programas estação crescendo tão
rapidamente quanto às memórias. Parafraseando a lei de Parkinson,
poderíamos dizer que "os programas tentem a expandir até ocupar toda a
memória disponível para armazena-los". Idealmente, o que todo
programador gostaria de ter à disposição é uma memória rápida e
infinitamente grande que também fosse não-volátil, isto é, que não
perdesse seu conteúdo quando a energia elétrica cai. E já que estamos
divagando, por que também para que fosse bem barata? Infelizmente, a
tecnologia ainda não oferece esse tipo de memória. A maioria dos
computadores, portanto tem uma hierarquia de memória, com uma
pequena quantidade de memória cache volátil, muito rápida e cara,
alguns megabytes de memória principal volátil (RAM), de
velocidade e preço médios, além de centenas ou milhares de megabytes
de armazenamento em disco não-volátil, lento e barato. O trabalho do
sistema operacional pe coordenar como essas memórias são utilizadas. A
parte do sistema operacional que gerencia a hierarquia de memória é
chamada gerenciador de memória. Seu trabalho é controlar que partes da
memória estão em uso e que não estão, alocar memória para processos
quando eles necessitarem e desalocar quando eles terminarem, e
gerenciar a troca entre a memória principal e o disco quando a memória
principal é muito pequena para armazenar todos os processos.
(TANENBAUM e WODDHULL, 2000, p. 211)
"A memória é fundamental para a operação de um sistema de
computação moderno. A memória consiste em um grande vetor de palavras
ou bytes, cada qual com seu próprio endereço. A CPU busca instruções da
memória de acordo como o valor do contador de programa. Essas
instruções também poderão causar carga e armazenamento em endereços
de memória específicos." (SILBERSCHATZ et al., 2000, p. 179)
Segundo Silberschatz et al. (2000) em um ciclo de execução padrão é
procurar uma instrução na memória e traduzir essa instrução, podendo
conter operações para buscar operandos na memória e após que for
executada poderá voltar à memória. A unidade de memória visualiza
apenas um fluxo de endereços, não conseguindo diferenciá-los e nem os
definir.
17
Historicamente, a memória principal sempre foi vista como um recurso
escasso e caro. Uma das maiores preocupações dos projetistas foi
desenvolver sistemas operacionais que não ocupassem muito espaço de
memória e, ao mesmo tempo, otimizassem a utilização dos recursos
computacionais. Mesmo atualmente, com a redução de custo e
conseqüente aumento da capacidade da memória principal, seu
gerenciamento é um dos fatores mais importantes no projeto de sistemas
operacionais. (MACHADO e MAIA, 2002, p. 155)
3.2 Monoprogramação
Segundo Tanenbaum e Woodhull (2000) o modo mais simples de
gerenciar memória é executar somente um programa de cada vez, dividindo
a memória com o sistema operacional e este processo. Quando um sistema
operacional segue as instruções acima ditas, somente um processo pode
estar executando por vez na memória. Geralmente estes sistemas possuem
um interpretador de comandos primitivo que recebe um comando para a
tratar e fica em modo ocupado até acabar de realizar a tarefa, quando esta
é concluída ele poderá tratar de outro comando que irá sobrepor a área de
memória do primeiro não tendo a menor consideração com o que
anteriormente estava naquela área.
3.3 Multiprogramação
Conforme Oliveira et al. (2001) a multiprogramação permite que
diversos processos sejam executados simultaneamente no computador com
a divisão de tempo do processador. Para que esta divisão seja satisfatória, a
gerencia de memória tem que permitir formas de compartilhamento de
memória seguras e eficientes.
3.3.1 Partições de memória
Como a memória possui um endereço linear de bytes e na
multiprogramação vários programas podem estar na memória, é necessária
uma divisão de memória em blocos estáticos ou dinâmicos.
18
3.3.1.1Fixa
Segundo
Tanenbaum
e
Woodhull
(2000)
em
sistemas
que
compartilham tempo existem vários processos na memória e isso significa
que quando um processo está ocioso esperando alguma interrupção de
hardware, por exemplo, outro pode ocupar o espaço de processamento do
processador. Percebe que nestes sistemas existe um grande aumento de
processamento e uso dos recursos computacionais. Uma forma muito
simples de atingir a multiprogramação é dividir toda a memória em
pedaços, estes pedaços podem ter tamanhos iguais ou variar de tamanho
também. A divisão da memória desta maneira é realizada no memento da
carga
do
sistema.Os
trabalhos
que irão
ser
executados
em
uma
determinada execução podem formar uma fila e serem executados um após
um em uma determinada partição, ou em uma forma mais adequada e
rápida: É organizada uma única fila com vários JOBS e na medida que os
JOBS que estavam residentes na memória em trabalho vão terminando os
processos da fila vão entrando na memória para serem executados.
Este sistema de partições fixas foi implantado pela primeira vez no IBM
OS/360 um computador de grande porte. (TANENBAUM e WODHULL, 2000)
De acordo com Machado e Maia (2002) quando era necessário alterar o
tamanho de uma partição no sistema de partições fixas, tinha-se que
desativar o sistema e reiniciar ele passando uma nova configuração das
partições. Nos primeiros sistemas os programas só funcionavam se fossem
carregados em uma partição de memória X. Isso se devia a uma
funcionalidade que ainda não estava implantada nos compiladores e
montadores da época. Estes compiladores e montadores só geravam código
absoluto (no processo de compilação os programas tinham seus códigos já
predeterminados com determinados endereços.).
Com a evolução surgiu o código realocável (as referências a endereços,
são com base no início do código) que permitia que um programa fosse
19
executado a partir de qualquer endereço da memória. Para saber qual
partição estava ocupada e qual não existia uma tabela de alocação, que
tinha o índice da partição, o tamanho da página e o status dela, sendo livre
ou não. (MACHADO e MAIA, 2002)
Segundo Silberschatz et al. (2000), em um sistema com partições fixas
cada partição poderá conter somente um processo em atividade, com isso o
grau de programação é limitado ao número de partições. Quando um
processo chega para memória deve ser procurado um bloco com tamanho
compatível com ele, e assim ele é carregado. O sistema operacional ordena
a fila de entrada dos processos com algum algoritmo de escalonamento.
3.3.1.2Dinâmica (troca)
Segundo Tanenbaum e Woodhull (2000) neste sistema deve ser trazido
um processo inteiro a memória e executar ele temporariamente e então o
levar de volta ao disco. A grande diferença entre um sistema dinâmico de
um com tabelas fixas é que o número, a posição e o tamanho das partições
podem mudar e muito. Essa capacidade de mutação traz grandes melhoras
no desempenho, porém fica muito mais difícil a manutenção desta memória
que esta em uso. Quando a uma entrada e saída de processos da memória
a uma tendência a ficarem pequenos espaços entre as partes, existe uma
técnica chamada de compactação de memória que junta todo este espaço
livre não utilizado em um só. Esta operação de compactação é muito
demorada e geralmente não é implementada. Um processo pode crescer,
alocando memória por conta própria, ocorrem problemas com isso: Se
existe uma área livre na primeira posição após o processo ela é alocada
pelo processo. Se a próxima lacuna contiver outro processo em execução
todo o código do processo atual deve se mover para uma área
suficientemente grande para poder comportar o processo e a quantidade de
memória alocada por ele. Mas se não há nenhum tipo de memória livre o
processo deve esperar ou ser eliminado. Se já é sabido que haverá possíveis
20
alocações de memória é recomendável alocar uma memória extra, para
evitar futuras alocações.
3.3.1.2.1Gerenciamento de memória com Mapa de Bits
Quando a memória for dinâmica o sistema operacional deve controlar
ela, com o uso de mapas de bits a memória é dividida em X unidades que
poderão receber os bits 0 para não utilizada e um para utilizada.
(TANENBAUM e WOODHULL, 2000)
"O tamanho da unidade de alocação é uma importante questão de
projeto. Quanto menor a unidade de alocação maior o mapa de bits."
(TANENBAUM e WOODHULL, 2000, p. 216)
3.3.1.2.2Gerenciamento de memória com Listas Encadeadas
Mantém armazenados em uma lista os segmentos alocados e os livres
de memória. Cada item da lista é um espaço de memória vazio ou cheio.
Por isso existem algoritmos para adquirir o melhor e mais rápido espaço de
memória. (TANENBAUM e WOODHULL, 2000)
Segundo Silberschatz et al. (2000) existem dois tipos de fragmentação:
•
Interna: Conforme os processos são carregados e descarregados da
memória o espaço livre da memória fica "picotado" em pequenas
partes, a fragmentação externa aparece quando a espaço disponível
na memória mas ele está fragmentado.
•
Externa: Se a memória for dividida em tamanhos fixos e alocar
unidades de tamanho de bloco, o espaço restante de um conteúdo
que esta na memória é a fragmentação externa.
"Na alocação particionada dinâmica ou variável, foi eliminado o
conceito de partições de tamanho fixo. Neste esquema, cada programa
utilizaria o espaço necessário, tornando essa área sua partição. Como os
programas utilizam apenas o espaço de que necessitam, no esquema de
21
alocação particionada dinâmica o problema de fragmentação interna não
ocorre." (MACHADO e MAIA, 2002, p 162)
3.3.2 Swapping
Segundo Machado e Maia (2002) a técnica de swapping foi criada para
tentar suprir o problema de falta de memória principal. O ciclo básico de um
processo é ficar na memória principal até o fim de sua execução, até nos
momentos em que o processo ficava ocioso esperando por uma operação
de leitura ou gravação. No swapping o processo que está pouco utilizado é
passado para a memória secundaria (swap out) normalmente sendo um
disco rígido. Após algum tempo o processo é carregado novamente para a
memória principal (swap in) para continuar sua execução. O algoritmo
usado para retirar um processo da memória deve ter como prioridade retirar
aquele que está com menores chances de ser posto em execução. Para a
técnica de swapping ser posta em execução deve-se ter em no sistema um
loader que faça a realocação de programas. A realocação dinâmica é feita
com um registrador especial com o nome de registrador de alocação.
Quando o programa é carregado na memória este registrador recebe o
endereço inicial do programa. Sempre que ocorrer uma chamada a um
endereço, o endereço que esta na instrução será somado ao conteúdo do
registrador, gerando um endereço físico.
O uso do swapping permite um maior uso dos recursos computacionais,
mas apresenta um grande problema que é o elevado tempo de operações
de entrada/saída (swap in/out). (MACHADO e MAIA, 2002)
Normalmente, um processo que é descarregado será carregado para o
mesmo espaço de memória que ocupava anteriormente, Essa restrição é
determinada pelo método de resolução de endereço. Se a resolução for
feita no momento de carga ou montagem, o processo não poderá ser
movido para posições diferentes. Se a resolução em tempo de execução
estiver sendo usada, é possível passar um processo para um espaço de
memória diferente, porque os endereços físicos são calculados durante o
tempo de execução. (SILBERSCHATZ et al., 2000, p. 184)
22
Segundo Tanenbaum e Woodhull (2000) o procedimento de troca
padrão é usado em poucos sistemas, pois ele utiliza um tempo grande de
troca não sendo aceito para um sistema de gerencia de memória. Versões
modificadas do swapping são usadas em outros sistemas como o UNIX.
3.3.3 Memória virtual
3.3.3.1Introdução
Segundo Tanenbaum e Woodhull (2000) surgiu uma época em que os
programas ficaram tão grandes que não eram capazes de serem carregados
na memória. Tempos depois apareceu a memória virtual esta técnica
permite que os programas podem ter um tamanho maior que a memória
física e mesmo assim serem executados. A memória virtual se adapta muito
bem em um sistema de multiprogramação, pois possibilita que múltiplos
pedaços de programas sejam executados na memória.
A memória virtual é uma técnica que permite a execução de processos
que podem não estar inteiramente na memória. A principal vantagem
vivível desse esquema é que os programas podem ser maiores do que a
memória física. Além disso, ele abstrai a memória principal em um vetor
extremamente grande e uniforme de armazenamento, separando a
memória lógica conforme vista pelo usuário da memória física. Essa
técnica libera os programadores da preocupação com as limitações de
memória. A memória virtual não é fácil de implementar, entretanto, e
pode diminuir muito o desempenho se for utilizada sem o devido cuidado.
(SILBERSCHATZ et al, 2000, p. 210)
Segundo Machado e Maia (2002) a memória virtual é uma técnica
sofisticada e poderosa de gerência de memória, as memórias principal e
secundária são unidas deixando o usuário com uma ilusão de que existe
uma memória muito maior que a física disponível, os endereços de memória
são abstratos aos endereços físicos de memória principal. A memória virtual
esta muito ligada à arquitetura do computador, pois com hardware de
memória virtual o desempenho fica muito mais rápido.
23
3.3.3.2Overlay
Segundo Tanenbaum e Woodhull (2000) overlays são pedaços de um
programa, a execução do overlay começa pelo zero e quando este termina
outros são chamados. Os overlays são mantidos no disco e são manipulados
dinamicamente pelo sistema operacional do disco para a memória e da
memória para o disco.
Para que um processo possa ser maior do que a quantidade de memória
alocada por ele, podemos usar overlays. A idéia do overlay é manter na
memória apenas as instruções e dados que são necessários em
determinado momento. Quando outras instruções são necessárias, elas
são carregadas no espaço que foi anteriormente ocupado por instruções
que não são mais necessárias. (SILBERSCHATZ et al., 2000, p. 183)
Figura 5: Overlay para um montador de dois passos (SILBERSCHATZ
et al., 2000)
Segundo Machado e Maia (2002) os programas eram uma vez limitados
ao tamanho da memória principal disponível, uma forma para contornar isso
foi dividir o programa em módulos na memória de que eles sejam
independentes e sejam executados em um mesmo endereço de memória.
24
"A definição das áreas de overlay é função do programador, através de
comandos específicos da linguagem de programação utilizada. O tamanho
de uma área de overlay pe estabelecido a partir do tamanho do maior
módulo." (MACHADO e MAIA, 2002, p. 158)
“Uma das primeiras tentativas de se usar armazenamento em disco
para armazenar memória principal fazia o uso de overlays, nos quais o
programa em execução sobrescreve seu próprio código com outro código
quando necessário.” (MURDOCCA e HEURING, 2000, p. 249)
3.3.3.3Paginação
Segundo Tanenbaum e Woodhull (2000) toda a área de endereços
virtuais é dividida em páginas e as unidades de memória física são
chamadas de molduras de página, as molduras e as páginas devem sempre
ter o mesmo tamanho.
25
Figura 6: A relação entre endereços virtuais e endereços físicos de
memória (TANENBAUM e WOODHULL, 2000)
A paginação é um esquema que permite que o espaço de endereçamento
físico de um processo seja não-continuo. A paginação evita o problema de
ajustar os pedaços de memória dos mais diversos tamanhos no
armazenamento auxiliar, um problema sério que afetou a maioria dos
esquemas de gerência de memória anteriores. Quando alguns fragmentos
de código ou dados que residem na memória principal precisam ser
descarregados (operação de swap out), deve haver espaço disponível no
armazenamento auxiliar. Os problemas de fragmentação discutidos em
relação à memória principal também prevalecem com o armazenamento
auxiliar, exceto pelo fato de que o acesso é muito mais lento, por isso é
impossível fazer a compactação. Devido às vantagens em relação aos
métodos anteriores, a paginação em suas muitas formas é utilizada com
freqüência em muitos sistemas operacionais.” (SILBERSCHATZ et al.,
2000, p 189)
26
A memória virtual por paginação é a técnica de gerência de memória
onde o espaço de endereçamento virtual e o espaço de endereçamento
real são divididos em blocos de mesmo tamanho chamados páginas. As
páginas no espaço virtual real são chamadas de páginas reais ou frames.
(MACHADO e MAIA, 2002, p. 176)
Paginação é uma forma de sobreposição automática que é gerenciada
pelo sistema operacional. O espaço de endereçamento é particionado em
blocos de tamanhos iguais chamados de páginas. Páginas são
normalmente de um tamanho que é uma potência de 2 tal como 2 na 10
= 1024 bytes. Paginação faz com que a memória física apareça maior do
que realmente é mapeando o espaço de endereçamento de memória
física a um espaço de endereçamento de memória virtual, que é
normalmente armazenado em disco. (MURDOCCA e HEURING, 2000,
p.249)
3.3.3.4Tabelas de páginas
Segundo Tanenbaum e Woodhull (2000) um endereço virtual tem as
seguintes partes: número da página virtual e deslocamento. O primeiro item
é um endereço de localização daquela página na tabela de páginas virtuais.
Usando este endereço virtual também se pode achar o número da moldura
de página correspondente a aquele endereço. O objetivo da tabela de
páginas é através do endereço virtual mapear uma moldura de página.
Cada sistema operacional tem seus próprios métodos para armazenar
tabelas de página. A maioria aloca uma tabela de página para cada
processo. Um ponteiro para a tabela de página é armazenado com outros
valores de registrador (como o contador de instruções) no bloco de
controle do processo. Quando o dispatcher é informado que determinado
processo deve ser iniciado, ele deverá recarregar os registradores de
usuário e definir os valores de tabela da página de hardware corretos a
partir da tabela de página de usuário armazenada. (SILBERSCHATZ et al.,
2000, p. 193)
Segundo Machado e Maia (2002) todo processo tem uma tabela de
páginas própria e cada página virtual tem uma entrada na tabela de
páginas. Cada entrada na tabela de páginas possui informações como: bit
de validade (para dizer se a página esta ou não na memória principal). Toda
vez que o programa em execução chama um endereço virtual, é verificado
se este endereço está atualmente na memória ou não. Se a página
referenciada não se encontrar na memória principal é gerada uma
interrupção de falta de página (page fault) o sistema operacional deve
27
tratar disso pegando a página na memória secundaria e a enviando até a
memória principal.
3.3.3.4.1Tabela de página multinível
De acordo com Tanenbaum e Woodhull (2000) para evitar o incomodo
problema de ter grandes tabelas de memória o tempo todo, alguns
computadores usam tabelas de páginas de multinível. Na paginação
multinível todas as tabelas de página não são mantidas na memória, só
ficam nela aquelas páginas que o processo esta usando ou que são de extra
importância.
28
Figura 7: (a) Um endereço de 32 bits com dois campos de tabela de
páginas. (b) Tabelas de páginas de dois níveis (TANENBAUM e
WOODHULL, 2000)
Um endereço em multinível é dividido em três campos: PT1:
Referencia-se a tabela de página de primeiro nível e esta tem ligações para
a tabela de páginas de segundo nível. PT2 Esta ligada à tabela de páginas
de segundo nível e esta tem a função de localizar um número de moldura
de página nela mesma. Deslocamento: Base de localização e movimento da
página.
Conforme Silberschatz et al. (2000) é possível usar varias tabelas de
página em um esquema de paginação. Mesmo usando vários níveis na
pesquisa de tabela a um aumento pouco significativo de acesso à memória.
29
"...A grande vantagem da paginação em múltiplos níveis é que apenas
estão residentes na memória principal as tabelas realmente necessárias aos
processos, reduzindo, dessa forma o espaço ocupado na memória."
(MACHADO e MAIA, 2002, p. 193)
3.3.3.4.2TLB
Segundo Tanenbaum e Woodhull (2000), manter várias tabelas de
página na memória não era produtivo pois causava um enorme impacto
negativo no desempenho. Foi criado um dispositivo de hardware que
mapeia endereços virtuais em físicos sem passar pela memória, o nome
deste dispositivo pe TLB ou memória associativa. Ele fica localizado dentro
da MMU e consistem em um número pequeno de entradas. Estas entradas
possuem campos com informações como número da página, status de
modificação, bits de proteção e moldura de página física que o processo
esta.
O funcionamento da TLB se da seguinte forma: Quando chega um
endereço ele é verificado se a página virtual está no TLB é verificado se a
permissão de acesso a página e ela é procurada se ele não estiver na TLB
uma das entradas atuais dela é retirada e esta entra. (TANENBAUM e
WOODHULL, 2000)
A gerencia de memória virtual utiliza a técnica de mapeamento para
traduzir endereços virtuais em endereços reais, podem, o mapeamento
implica pelo menos dois acessos a memória principal: o primeiro a tabela
de páginas e o outro a própria página. Sempre que um endereço virtual
precisa ser traduzido a tabela de mapeamento deve ser consultada para
se obter o endereço do frame e, posteriormente , acessar o dados na
memória principal. (MACHADO e MAIA, 2002, p. 194)
Segundo Machado e Maia (2002) o funcionamento da TLB é como se
fosse uma memória cache, pois tem um espaço pequeno e mantém as
ultimas entradas. A TLB e fundamental para reduzir os acessos nos sistema
de memória virtual.
30
3.3.3.4.3Tabelas de páginas invertidas
Segundo Tanenbaum e Woodhull (2000) as tabelas de página
tradicionais necessitam uma entrada por página virtual manter estas
páginas na memória consome espaço e à medida que se aumenta os bits
dos computadores este espaço expande constantemente.
Segundo Silberschatz et al. (2000), para contornar o incomodo de
manter várias páginas na memória pode-se usar uma tabela de página
invertida. Nesta tabela existe uma entrada para cada página real de
memória. Cada uma das entradas se orienta por um endereço virtual que
pe armazenado naquela posição rela da memória. Todas as entradas da
tabela de páginas invertidas são um par de (id do processo e número da
página)
Este método de paginas invertidas reduz a quantidade de memória
usada para armazenar de dados. A tabela de páginas invertidas possui
somente endereços físicos, como a pesquisa por páginas é feita com
endereços lógicos fica uma tanto demorada a pesquisa de páginas.
(SILBERSCHATZ et al., 2000)
31
Figura 8: Tabela de página invertida (SILBERSCHATZ et al., 2000)
3.3.3.5Substituição de páginas
Quando ocorre uma falha de página o sistema operacional precisa
escolher uma página para remover da memória e dar lugar para a página
que precisa ser carregada, se a página a ser removida tiver sido movida
enquanto na memória ela deve ser regravada no disco para atualizar a
cópia em disco, se, entretanto a página não foi alterada(p. ex. uma
página contém texto de programa.) a cópia em disco já esta atualizada
então nenhuma regravação é exigida. A página a ser lida simplesmente
subscreve a página sendo expulsa. Embora seja possível selecionar
aleatoriamente uma página para remover em cada falha de página, o
desempenho do sistema será muito melhor se uma página que não é
intensamente utilizada for escolhida. Se uma página altamente utilizada
for removida provavelmente ela precisara ser trazida de volta em breve, o
que resulta em sobrecarga externa. (TANENBAUM e WOODHULL, 2000, p.
225)
A substituição de página assume a seguinte abordagem. Se um quadro
esta livre, encontramos um que não esta sendo usado no momento e o
liberamos. Podemos libertar um quadro gravando seu conteúdo no espaço
de swap e alterando a tabela de página(e todas as outras tabelas) para
indicar que a página não esta mais na memória. Agora podemos usar o
quadro liberado para armazenar a página para a qual ocorreu a falta no
processo. (SILBERSCHATZ et al., 2000, p. 218)
"A melhor estratégia de substituição de páginas seria aquela que
escolhesse um programa que não fosse mais utilizado no futuro ou levasse
32
mais tempo para ser novamente referenciado." (MACHADO e MAIA, 2002, p.
185)
3.3.3.6Swapping na memória virtual
Segundo Machado e Maia (2002) o uso da técnica de swapping faz
aumentar o número de processos que usam a memória principal, trazendo
assim uma maior multiprogramação no sistema. Se a memória principal
esta cheia e chegam novos processos para serem executados, o sistema
tem que usar a técnica de swapping para reunir os processos que iram sair
da memória principal indo para a memória secundária (swap out), nesta os
processos selecionados ficaram em um arquivo swap. Quando os processos
que estão no arquivo swap precisarem ir para a memória principal ocorre à
operação de swap in para transferir estes processos. Existem vários
quesitos a serem seguidos para perceber qual processo saí da memória. A
base desta escolha é selecionar os processos que dificilmente são
executados.
O arquivo swap é compartilhado por todos os processos que estão sendo
executados no ambiente. Quando um processo é criado, o sistema reserva
um espaço no arquivo swap para o processo. Da mesma forma. quando
um processo é eliminado o sistema libera a área alocada. Em alguns
sistemas operacionais, o arquivo de swap é, na verdade, uma área em
disco reservada exclusivamente para esta função. Independentemente da
implementação, o arquivo de swap deve oferecer o melhor desempenho
possível para as operações de swapping. (MACHADO e MAIA, 2002, p 203)
33
Figura 9: Swapping em memória virtual (MACHADO e MAIA, 2002)
34
3.3.3.7Segmentação
Segundo Tanenbaum e Woodhull (2000) um conjunto de endereços
completamente independentes são chamados de segmentos. Os segmentos
têm uma seqüência linear de 0 até N, estes segmentos podem ter um
comprimento também de 0 até N. O comprimento dos segmentos pode
variar durante a sua execução, por exemplo um segmento de pilha muda
seu tamanho quando algo é retirado ou colocado na pilha.
O endereço em uma memória segmentada é dividido em duas partes
(número do segmento e endereço dentro do segmento). (TANENBAUM e
WOODHULL, 2000)
Figura 10: Uma memória segmentada permite que cada tabela
cresça ou escolha independentemente das outras tabelas
(TANENBAUM e WOODHULL, 2000)
Segundo Silberschatz et al. (2000) um usuário ou programador do
sistema não imagina memória como um vetor linear de bytes e sim com
uma coleção de segmentos com tamanhos diversos.
35
"A segmentação é um esquema de gerência de memória que oferece
suporte a essa visão de usuário da memória. Um espaço de endereçamento
lógico é uma coleção de segmentos. Cada segmento tem um nome e
tamanho. Os endereços especificam o nome do segmento e o deslocamento
dentro do segmento. O usuário especifica, portanto, cada endereço por
duas
quantidades:
um
nome
de
segmento
e
um
deslocamento."
(SILBERSCHATZ et al., 2000, p. 201)
Figura 11: Visão de usuário de um programa (SILBERSCHATZ et al.,
2000)
"Memória virtual por segmentação é a técnica de gerência de memória
onde o espaço de endereçamento virtual é dividido em blocos de tamanhos
diferentes chamados segmentos. Na técnica de segmentação, um programa
é dividido logicamente em sub-rotinas e estruturas de dados, que são
alocadas em segmentos na memória principal." (MACHADO e MAIA, 2002, p.
197)
De acordo com Machado e Maia (2002) na segmentação ocorre uma
ligação entre a lógica do programa e sua alocação na memória principal.
Geralmente os segmentos são criados pelo compilador assim sendo os
segmentos podem ter procedimentos, funções, pilhas e variáveis. Os
segmentos são mapeados através de uma tabela de mapeamento de
36
segmentos. Um grande trunfo da segmentação sobre a paginação é a
facilidade de tratar estruturas de dados dinâmicas. Na segmentação os
segmentos referenciados são carregados na memória, assim pode haver
desperdício de memória, se o programa não for dividido em partes. Na
paginação ocorre fragmentação externa, pois pode haver áreas livres entre
processos.
"...Segmentação divide o espaço de endereçamento em segmentos,
que podem ter tamanho arbitrário. Cada segmento é o seu próprio espaço
de endereçamento unidimensional. Isso permite que tabelas, pilhas e outras
estruturas de dados sejam mantidas como entidades lógicas que crescem
sem trombar umas nas outras." (MURDOCCA e HEURING, 2000, p. 253)
3.3.3.8Thrashing
Segundo Machado e Maia (2002) thrashing é o grande movimento de
páginas ou segmento entre a memória principal e a memória secundária.
Na paginação o thrashing pode ocorrer por haver um grande número de
page fault de um processo ou se existir mais processos batalhando por
memória principal que o espaço disponível. Na segmentação ocorre
thrashing, pois existe grande transferência de segmentos, devido à divisão
do programa. Outro caso é quando há mais processo batalhando por
memória principal que espaço em disco.
Segundo Silberschatz et al. (2000) o thrashing trás grandes problemas
de desempenho, à medida que a utilização da CPU aumenta, sobe o uso da
multiprogramação até chegar a um limite, quando este limite é atingido a
utilização da CPU caí drasticamente, tendo assim o sistema ter que diminuir
a multiprogramação. Para evitar a ocorrência do thrashing tem que ser
fornecido ao processo um número maior de quadros do ele precisa.
37
Figura 12: Thrashing (SILBERSCHATZ et al., 2000)
38
4
ALGORITMOS
4.1 Alocação memória
4.1.1 Conceito
Segundo Machado e Maia (2002) os sistemas operacionais usam várias
formas para ver qual área de memória livre um programa poderá ser
executado. Não importando o algoritmo o sistema possui uma lista de áreas
livres disponíveis.
"Quando os processos e as lacunas são mantidos em uma lista
classificada por endereço, vários algoritmos podem ser utilizados para
alocar memória para um processo recentemente criado ou trocado para a
memória." (TANENBAUM e WOODHULL, 2000, p.216)
Segundo Silberschatz et al. (2000), existem várias soluções para
contornar o problema da fragmentação de memória dinâmica. Uma delas é
pesquisar na memória para ver qual bloco deve ser alocado.
4.1.2 First-fit
"Aloca o primeiro bloco de memória grande o suficiente. A busca pode
começar no início do conjunto de blocos ou no ponto em que a pesquisa
first-fit anterior terminou. Podemos interromper a busca assim que
encontramos um bloco de memória grande o suficiente." (SILBERSCHATZ et
al., 2000, p. 188)
"Na estratégia first-fit, a primeira partição livre de tamanho suficiente
para carregar o programa é escolhida. Nesse algoritmo, a lista de áreas
livres está ordenada crescentemente por endereços. Como o método tenta
primeiro utilizar as áreas livres de endereços mais baixos, existe uma
39
grande chance de se obter uma grande partição livre nos endereços de
memória mais altos." (MACHADO e MAIA, 2002, p. 167)
"O algoritmo mais simples é chamado de algoritmo do primeiro ajuste.
O gerenciador de memória varre toda a lista de segmentos até localizar
uma lacuna que seja suficientemente grande. A lacuna, então, é dividida em
dois pedaços, um
para o processo e um para a memória não-utilizada,
exceto no improvável
caso de
um ajuste
exato." (TANENBAUM e
WOODHULL, 2000, p. 216)
4.1.3 Best-fit
"Aloca o menor bloco de memória grande o suficiente. É preciso
procurar na lista inteira, a menos que a lista seja ordenada por tamanho.
Essa estratégia gera o menor bloco de memória restante." (SILBERSCHATZ
et al., 2000, p. 188)
Na estratégia best-fit, a melhor partição é escolhida, ou seja, aquela em
que o programa deixa o menor espaço sem utilização. Nesse algoritmo, a
lista de áreas livres está ordenada por tamanho, diminuindo o tempo de
busca por uma área desocupada. Uma grande desvantagem desse
método é conseqüência do próprio algoritmo. Como é alocada a partição
que deixa a menor área livre, a tendência é que cada vez mais a memória
fique com pequenas áreas não-contíguas, aumentando o problema da
fragmentação. (MACHADO e MAIA, 2002, p. 165)
"Pesquisa na lista inteira e pega a menor lacuna que seja adequada.
Antes de dividir uma lacuna grande que talvez seja necessária mais tarde, o
melhor ajuste tenta localizar uma lacuna é próxima do tamanho real
necessário." (TANENBAUM e WOODHULL, 2000, p. 217)
4.1.4 Worst-fit
"Aloca o maior bloco de memória. Mais uma vez, é preciso procurar na
lista inteira, a menos que ela esteja classificada por tamanho. Essa
estratégia gera o maior bloco de memória restante, que pode ser mais útil
40
do que o bloco restante menor de uma abordagem best-fit." (SILBERSCHATZ
et al., 2000, p. 188)
"Na estratégia worst-fit, a pior partição é escolhida, ou seja, aquela em
que o programa deixa o espaço sem utilização. Apesar de utilizar as maiores
partições, a técnica de worst-fit deixa espaços livres maiores que permitem
a um maior número de programas utilizar a memória, diminuindo o
problema da fragmentação." (MACHADO e MAIA, 2002, p. 165)
"Sempre pegar a maior lacuna disponível, de modo que a lacuna
resultante seja suficientemente grande para ser útil." (TANENBAUM e
WOODHULL, 2000, p. 217)
4.1.5 Next-fit
"Ele funciona da mesma maneira que o primeiro ajuste, exceto que
monitora a posição em que ele está sempre que encontra uma lacuna
adequada. Da próxima vez que é chamado para localizar uma lacuna, ele
começa pesquisando na lista a partir do lugar que ele deixou da última vez,
em vez de sempre a partir do começo." (TANENBAUM e WOODHULL, 2000,
p. 217)
4.1.6 Quick-fit
"Mantém listas separadas para alguns tamanhos exigidos mais
comuns." (TANENBAUM e WOODHULL, 2000, p. 217)
Este algoritmo possui poucas referências pois é pouco utilizado.
41
4.2 Algoritmos de substituição de páginas
4.2.1 LRU
"O algoritmo LRU seleciona a página na memória principal que está a
mais tempo sem ser referenciada. Se considerarmos o princípio da
localidade, uma página que não foi utilizada recentemente provavelmente
não será referenciada novamente em um futuro próximo." (MACHADO e
MAIA, 2002, p. 187)
De acordo com Silberschatz et al. (2000) o LRU junta a cada página
uma referencia de uma data, está data diz respeito à última vez que a
página foi usada. No momento em que uma página necessite ser trocada, a
página que será retirada da memória será aquela que tiver a menor data de
acesso. A implementação do LRU exige uma forte ajuda do hardware.
Implementações viáveis:
•
Contadores: Neste esquema existem dois campos. Um com a página e
outro com um contador, quando a página é usada este contador
cresce, substituindo o valor antigo. A página a ser substituída será
aquela com o menor contador.
•
Pilha: Existe um vetor com várias entradas, cada uma destas entradas
conterá uma página. Esse array é classificado de uma forma que as
páginas mais usadas fiquem sempre no topo da pilha.
Nenhuma implementação de LRU seria viável se não existisse uma
assistência de hardware e registradores TLB. (SILBERSCHATZ et al., 2000)
Embora o LRU seja teoricamente realizável, ele não é barato. Para
implementar completamente o LRU, é necessário manter uma lista
encadeada de todas as páginas na memória, com as páginas mais
recentemente utilizadas na frente e as menos recentemente utilizadas no
fundo. A dificuldade é que a lista deve ser atualizada a cada referência de
memória. A operação de localizar uma página na lista, excluí-la e, então,
movê-la para a frente consome muito tempo, mesmo em hardware
42
(supondo que tal hardware pudesse ser construído). (TANENBAUM e
WOODHULL, 2000, p. 228)
4.2.2 LFU
"O algoritmo de substituição de página menos freqüentemente usada
Least Frequently Used (LFU) requer que a página com a menor contagem
serja substituída. O motivo para essa seleção pe que uma página muito
usada deve ter uma contagem de referência alta. Esse algoritmo enfrenta
o seguinte problema: uma página é muito usada durante a fase inicial de
um processo,mas depois nunca mais é usada. Como ele foi muito
utilizada, possui uma alta contagem e permanece na memória embora
não seja mais necessária. Uma solução é deslocar as contagens para a
direita em 1 bit em intervalos regulares, formando uma contagem de uso
médio com decaimento exponencial." (SILBERSCHATZ et al., 2000, p. 226)
"O algoritmo LFU seleciona a página menos referenciada, ou seja, o
frame menos utilizado. Para isso, é mantido um contador com o número de
referências para cada página na memória principal. A página que possuir o
contador com o menor número de referências será escolhida, ou seja, o
algoritmo evita selecionar páginas que são bastante utilizadas." (MACHADO
e MAIA, 2002, p. 187)
4.2.3 NUR
Segundo URI, o NUR utiliza como critério para substituição de páginas o
acesso recente à página, ou seja, é substituída a página que a mais tempo
não foi acessada. Um argumento para o NUR trabalhar dessa forma é que
as páginas que não foram acessadas no passado provavelmente não serão
usadas no futuro.
De acordo com o COTUCA, o NUR se baseia em excluir da memória a
página mais velha em termos de uso. Para avaliar qual página esta apta a
sair da memória, o NUR trabalha com dois bits, um indicando o estado de
modificação(M) e o outro é o bit de referência(R). O algoritmo classifica as
páginas em 4 tipos:
43
Tabela 1: Classificação das páginas.
Classe
0
1
2
3
Bit Referência
Não
Não
Sim
Sim
Bit Modificação
Não
Sim
Não
Sim
Quando ocorrer a falta de páginas o algoritmo retira as páginas na
ordem cresceste da classe, ou seja, primeiro todas as páginas de bit 0, se
não haver nenhuma página na classe 0 ele vai para a classe 1 e assim
sucessivamente. (COTUCA)
4.2.4 NFU
Segundo o COTUCA, o algoritmo NFU é uma implementação do LRU
baseada em software. O funcionamento dele é o seguinte: Existirá um
contador associado a cada página, esse contador é movimentado a cada
interrupção de tempo. Quando acontecer a falta de páginas, será eliminada
da memória a página com o maior valor do contador.
4.2.5 MRU
Segundo
Tanenbaum
(2003)
este
algoritmo
chega
perto
do
desempenho do algoritmo de substituição de páginas Ótimo. Ele se baseia
no principio de que a página com maior tempo sem uso deve ser a
escolhida a ser substituída da memória.
Para implementar o MRU é gasto muitos recursos computacionais, pois
é necessário ter uma lista com todas as páginas da memória. (TANENBAUM,
2003)
Existem duas maneiras aplicáveis de se implementar o LRU por
software:
•
Contador: Utiliza um contador de 64 bits que conterá o número de uso
de cada página da memória. Dessa forma quando for feita a escolha
44
para a página a ser retirada da memória será analisada a página com
o menor valor deste contador. (TANENBAUM, 2003)
•
Matriz de bits: Esta estrutura contém as listas e colunas com páginas
de memória. Sempre que uma página é referenciada a linha
correspondente da matriz é preenchida com o valor 1 e a coluna fica
com o valor 0. Na escolha da página a ser substituída será
considerado o menor valor como critério de seleção. (TANENBAUM,
2003)
4.2.6 Ótimo
Segundo Silberschatz et al. (2000) o algoritmo ótimo possuí a menor
taxa de faltas de páginas de todos os algoritmos e nunca sofrerá a anomalia
de Belady. Sua regra é substituir a página que não será usada até o fim de
um período. O ótimo promete a menor taxa de falta de páginas em um
número de quadros.
O algoritmo ótimo é difícil de se implementar pois tem que se conhecer
a string do futuro. (SILBERSCHATZ et al., 2000)
Segundo Tanenbaum e Woodhull (2000), o algoritmo de substituição de
páginas ótimo é impossível de implementar. O sistema operacional não
consegue prever qual página virá no futuro. Mas para motivo de testes você
pode utilizar, o algoritmo ótimo em um simulador, isso é útil para medir o
desempenho de novos algoritmos.
"Se um sistema operacional alcançar um desempenho de, digamos,
somente 1% pior do que o algoritmo ótimo, o esforço gasto em pesquisar
um melhor algoritmo resultará em uma melhoria de 1% no máximo."
(TANENBAUM e WOODHULL, 2000 p. 226)
O algoritmo ótimo seleciona para substituição uma página que não será
mais referenciada no futuro ou aquela que levará o maior intervalo de
45
tempo para ser novamente utilizada. Apesar de este algoritmo garantir as
menores taxas de paginação para os processos, na prática é impossível e
ser implementado, pois o sistema operacional não tem como conhecer o
comportamento futuro das aplicações. Essa estratégia é utilizada apenas
como modelo comparativo na análise de outros algoritmos de
substituição. (MACHADO e MAIA, 2002, p. 186)
4.2.7 FIFO
No algoritmo FIFO, a página que primeiro foi utilizada será a primeira a ser
escolhida, ou seja, o algoritmo seleciona a página que está a mais tempo
na memória principal. O algoritmo pode ser implementado associando-se
a cada página o momento em que foi carregada para a memória ou
utilizando-se uma estrutura de fila, onde as páginas mais antigas estão no
início e as mais recentes no final. (MACHADO e MAIA, 2002, p. 186)
"...Quando aplicado a estoques, FIFO talvez remova produtos como
vaselina para bigodes, mas talvez também remova farinha, sal ou manteiga,
Quando aplicado a computadores, o mesmo problema surge. Por essa razão
FIFO em sua forma pura é raramente utilizado." (TANENBAUM e WOODHULL,
2000, p. 227)
O algoritmo de substituição de página mais simples é um algoritmo FIFO.
Esse algoritmo associa a cada página o instante em que a página foi
levada para a memória. Quando é preciso substituir uma página, a página
mais antiga é trazida. Podemos criar uma fila FIFO para manter todas as
páginas na memória. Substituímos a página que estiver no início da fila.
Quando uma página é movida para a memória, ela é inserida no final da
fila. (SILBERSCHATZ et al., 2000, p. 221)
Segundo Silberschatz et al. (2000) o algoritmo FIFO é fácil de entender
e implementar, porém seu desempenho é muito duvidoso. Este algoritmo é
bastante venerável a anomalia de Belady (Quando a taxa de falta de
páginas aumenta a medida que o número de quadros alocados aumenta.)
4.2.8 SC
Uma modificação simples do FIFO evita o problema de jogar fora uma
página intensamente utilizada pe inspecionar o bit R da página mais
antiga. Se for 0, a página será antiga ou não-utilizada, então, ela é
substituída imediatamente. Se o bit R for 1, o bit será limpo, a página será
colocada no fim da lista de páginas e seu tempo de carga é atualizado
como se acabasse de chegar na memória. Então a pesquisa contínua.
(TANENBAUM e WOODHULL, 2000, p. 227)
46
De acordo com, Silberschatz et al (2000) o algoritmo segunda chance é
um algoritmo FIFO adaptado com um campo extra, esse campo pode conter
o bit 0 ou 1. Se o bit for 0 a página, referenciada é substituída. Caso
contrário se for 1, está página recebe uma segunda chance, ou seja, seu bit
é modificado para 0 e ela é passada para o final da fila. Caso ocorra um
momento em que todos os bits da página forem 1, o algoritmo segunda
chance se transforma em um tradicional FIFO eliminando a primeira página
da fila.
4.2.9 CLOCK
Conforme Tanenbaum e Woodhull (2000) a substituição de páginas
relógio ou clock mantém todas as páginas em uma lista circular, com um
recurso de ponteiro posicionado na página mais antiga. Se ocorrer uma falta
de página, a página apontada pelo ponteiro é analisada, se seu bit de
utilização for 0, a página é retirada da memória , uma nova página será
posta e o ponteiro fará um movimento a frente. Caso o bit seja 1, esse bit é
setado para 0 e o ponteiro avança uma posição.
4.2.10WSCLOCK
De acordo com Tanenbaum (2003), o WSCLOCK é baseado no algoritmo
Clock, tem uma fácil implementação e bons desempenhos. Este algoritmo
trabalha com uma lista circular e um ponteiro que fica sempre posicionado
no último movimento dele. Nos itens desta lista existe um campo com um
bit. Se esse bit for igual a 1 a página foi referenciada durante a interrupção
do relógio atual, caso o bit for 0, a página pode ser substituída.
4.2.11PFF
Segundo SEDMAK (1997) o ideal dos sistemas seria se o total de falta
de páginas fosse sempre 0, assim uma série de processamentos seriam
47
evitados, melhorando muito a performance do sistema. Infelizmente este
zero das páginas não pode ser praticado. O algoritmo PFF trata uma
quantidade de não-zero de faltas de páginas como sendo um ideal.
A freqüência de falta de páginas (PFF) determina um monitoramento
das taxas de faltas de páginas. Se a talha de falta de página for maior que
um ponto P, o alocamento das páginas será aumentado. Caso contrário, se
o número de faltas de páginas for mais baixa que um ponto inicial, o
alocamento das páginas será diminuído. (SEDMAK, 1997)
"No instante t(rk) da falta, a distância temporal Df até a falta anterior é
comparada com 1/P. Se Df £ 1/P nenhuma página é substituída, ao
contrário, a alocação de memória do programa é aumentada de uma
página. Se Df > 1/P, as páginas não referenciadas no intervalo Df (se houver
alguma) são retiradas da memória." (CIC)
Segundo MCCRAW, os vários algoritmos de substituição de páginas
podem também ser usados para monitorar a taxa de falta de páginas que
ocorre em um determinado programa.
O PFF tem limitação quanto à aplicação, por exemplo, um banco de
dados causa uma grande freqüência de falta de páginas. Neste esquema
programa não tem benefício em deixar registradas páginas. As fortes
mudanças de troca de páginas resultam em desperdício de memória.
(MCCRAW)
4.2.12LIRS
“Este algoritmo utiliza os intervalos de acessos entre diferentes blocos
em seqüência para determinar a relevância dos blocos. O algoritmo
funciona da maneira contrária ao algoritmo LRU, que utiliza o tempo de
último acesso a um bloco para determinar a relevância do mesmo. O
48
algoritmo LIRS leva em conta os intervalos de acesso aos blocos para
determinar a relevância dos mesmos.” (DODONOV)
4.2.13ARC
Segundo Megiddo e Modha (02/2003) a memória cache é fundamental
para os computadores modernos da atualidade. Para controlar a cache de
uma forma produtiva existem os algoritmos de cache, os progressos destes
algoritmos tem afeitado muito o desempenho dos computadores.
O algoritmo ARC possui as seguintes características:
•
Fácil implementação;
•
Tem baixo overhead, respondendo rapidamente a mudanças;
•
Sua execução independe do tamanho da cache;
•
O ganho de desempenho em relação ao LRU existe;
A política geral de funcionamento do ARC é ter uma grande falta de
páginas e possuir um baixo overhead. (MEGIDDO e MODHA, 02/2003)
De acordo com Megiddo e Modha (03/2003) o ARC funciona da seguinte
forma: Ele mantém duas listas LRU de páginas. Uma lista contém páginas
que foram visitadas somente uma vez recentemente. E a outra lista contém
páginas que foram acessadas ao menos duas vezes recentemente. Deve-se
pensar no ARC imaginando duas tabelas, uma de propósito recentemente
visitada e a outra de propósito freqüência de visitas.
"ARC é fácil de implementar e seu tempo de execução por pedido é
independente do tamanho da cache." (MEGIDDO e MODHA, 2004)
Megiddo
e
Modha
(08/2003)
realizaram
uma
série
comparando o ARC com o LRU que resultaram na tabela abaixo:
de
testes
49
Tabela 2: Resultados de testes com o algoritmo ARC. (MEGIDDO e
MODHA, 08/2003)
•
Trabalho
Tamanho
LRU
ARC
carregado
P1
P2
P3
P4
P5
P6
P7
P8
P9
P10
P11
P12
P13
P14
ConCat
Merge(P)
DS1
SPC1
S1
S2
S3
Merge(S)
(MB)
16
16
16
16
16
16
16
16
16
16
16
16
16
16
16
128
1024
4096
2048
2048
2048
4096
(% Faltas)
16.55
18.47
3.57
5.24
6.73
4.24
3.45
17.18
8.28
2.48
20.92
8.93
7.83
15.73
14.38
38.05
11.65
9.19
23.71
25.91
25.26
27.62
(% Faltas)
28.26
27.38
17.12
11.24
14.27
23.84
13.77
27.51
19.73
9.46
26.48
15.94
16.60
20.52
21.67
39.91
22.52
20.00
33.43
40.68
40.44
40.44
Os traços P1-p14 foram coletados usando VTrace sobre diversos
meses de estações de trabalho com Windows NT que funcionavam
como aplicações on-line.
•
ConCat é a contenação dos traços de P1-P14.
•
Merge(P) foi obtido fundindo os itens P1-P14.
•
O DS1 é um traço de sete dias feito com um exame de um usuário da
base de dados.
•
SPC1 são varreduras seqüências longas.
•
S1-S3 leituras de disco originadas por um sistema de busca comercial.
•
Merge(S) foi obtido fundindo os itens S1-S3
4.2.14Clock-Pro
Versão on-line do algoritmo adaptativo LIRS que, utilizando três ponteiros
circulares e independentes sobre uma única fila LRU, procura distinguir
50
páginas com maior ou menor probabilidade de reutilização, classificadas
respectivamente como “quentes” ou “frias” (“hot” ou “cold”). Esta
classificação é baseada na reutilização recente de cada página e somente
páginas “frias” são substituídas quando uma falta de página ocorre. De
maneira similar aos algoritmos CAR e CART, o Clock-Pro mantém na fila
algumas páginas recém-substituídas como referencial adicional
temporário. (CASSETTARI e MIDORIKAWA apud JIANG et al.)
4.2.15CAR
Versão on-line do algoritmo adaptativo ARC. Utiliza duas filas,
complementares entre si, para armazenar os identificadores de cada página
carregada na memória. Uma das filas engloba páginas residentes nas quais
não se percebe uma tendência de reutilização pontual, enquanto a outra fila
é dinamicamente preenchida por páginas que demonstram tal tendência.
Ambas são controladas por ponteiros que se movimentam como no
algoritmo Clock. A primeira fila tem prioridade na substituição, isto é, a
probabilidade de uma página ser substituída na primeira fila é maior do que
na segunda. Páginas substituídas permanecem nas filas por um certo tempo
após deixarem fisicamente a memória, servindo como uma base histórica
recente para a orientação do algoritmo. O tamanho das filas, gerenciado de
modo dinâmico indica qual delas deve ter uma página removida em caso de
falta de página. (CASSETTARI e MIDORIKAWA apud BANSAL e MODHA)
4.2.16CART
Variação do algoritmo CAR que inclui um mecanismo adicional para
diferenciar
páginas
referenciadas
constantemente
daquelas
muito
referenciadas em um único período. Utilizando um novo bit como filtro, o
algoritmo classifica as páginas como sendo de “reutilização localizada”
(“short-term utility”) ou de “reutilização constante” (“long-term utility”).
Páginas do primeiro grupo têm prioridade de substituição quando se tornam
inativas na memória. Tanto a lógica como a estrutura operacional do
algoritmo CAR são mantidas, entretanto uma complexidade maior de
51
implementação é acrescentada.(CASSETTARI e MIDORIKAWA apud BANSAL e
MODHA)
52
5
COMPARAÇÃO DOS ALGORITMOS
Para
demonstrar
o
funcionamento
prático
dos
algoritmos
de
gerenciamento de memória, nas áreas: alocação e substituição de páginas,
foram utilizados simuladores baseados em software.
Inicialmente foi realizada uma busca na Internet a procura deste tipo
de software. Foram obtidos resultados pouco satisfatórios quanto a os
algoritmos de substituição de páginas, pois, grande parte dos simuladores
suportava poucos tipos de algoritmos.
Baseado na experiência acima, foi desenvolvido um simulador de
algoritmos de gerenciamento de memória, surgiu assim o TSM (Talau
Simulador de Memória). Este programa foi escrito em C ANSI, podendo
assim ser suportado em diferentes plataformas de sistemas operacionais.
Foi escolhida a linguagem de programação C devido a sua facilidade de
interação com ponteiros de memória.
O
TSM
atualmente
na
versão
(http://geocities.yahoo.com.br/marcostalau/projetos/tsm)
0.0.5
suporta
os
seguintes algoritmos: FIFO, LRU, LFU, SC, CLOCK, OPT, NUR e WSCLOCK.
O funcionamento do TSM está baseado em um arquivo com páginas,
simbolizando um programa e através deste é gerado o processo durante a
execução do simulador. O processo possui inúmeras páginas podendo ser
uma seqüência com X números iguais ou diferentes.
Quando o arquivo de processos está carregado, é a hora certa de
executar este processo. O TSM possui uma memória com um tamanho
definida pelo usuário, é nesta memória que as páginas do processo deverão
ser executadas. No momento em que uma página não está na memória é
gerada uma falta de página, também ocorre falta de página quando a
memória está cheia e existem páginas que precisão ser carregadas. É neste
53
ponto que os algoritmos de substituição de páginas entram em cena. Estes
algoritmos manipulam as páginas de memória com o objetivo de retirar
uma delas da memória.
Ao finalizar a execução do processo o TSM retorna a quantidade de
faltas de páginas ocorridas e o tempo de execução total do programa. Se
passada a opção “-g” como argumento de linha de comando, será obtido
como resultado um arquivo com o histórico da execução do processo,
pronto para ser executado pelo “gnuplot” (http://gnuplot.sf.net).
54
Figura 13: Tela de opções do simulador TSM.
Figura 14: Simulador TSM sendo executado com o algoritmo LRU.
Quadro 1: Trecho de código fonte do TSM.
struct tabelaWSCLOCK {
int pagina;
int tempo;
int bituso;
int bitm; //modificação
} *tabWSCLOCK;
/*
Abre arquivo com páginas e carrega em uma tabela.
*/
void carregaArquivo(char nome[], int *tabela) {
55
FILE *arq;
int t = 0;
int x = 0;
int q = 0;
char c;
char numero[5];
arq = fopen(nome, "r");
if (arq == NULL) {
fprintf(stderr, "ERRO ao abrir %s\n", nome);
exit(-1);
}
while (!feof(arq)) {
c = fgetc(arq);
if (isspace(c)) {
numero[x] = '\0';
x = 0;
*(tabela + q) = atoi(numero);
q++;
continue;
}
numero[x] = c;
x++;
}
*(tabela + q) = 0;
}
Para os algoritmos de alocação de memória foi encontrado na Internet
um bom simulador o fits (http://www.utdallas.edu/~ivor/dl/fits/fits.html). O
fits é um Applet Java, que é executado através de um navegador WEB.
Surgiram dificuldades com este simulador no momento de receber os
resultados no decorrer do da execução do applet para um arquivo, o
simulador original não tinha este suporte, pois, applets tem sérias restrições
de segurança não podendo acessar arquivos do disco de um computador
local. Foi conseguido obter os fontes do fits e realizei algumas modificações
nele para dar o suporte a criação de arquivo de registro dos dados. Para o
applet poder ser executado com essa característica, adicionei um
certificado digital nele, assim com a autorização do usuário através de uma
caixa de dialogo do browser, pode-se realizar a escrita de arquivos no
computador
do
usuário.
Está
versão
alterada
está
disponível
http://geocities.yahoo.com.br/marcostalau/codigos/java/simulador_fits.
em
56
Para os algoritmos ARC, CAR e CLOCK-PRO foram encontrados artigos
científicos premiados a respeito deles, nos quais pude extrair alguns dados
interessantes.
Os algoritmos NFU e MRU têm extrema semelhança com o LRU e LFU
no nível de software. Por isso não foram testados.
5.1 Gráficos
Os gráficos abaixo foram gerados pelo software “gnuplot”, este
software foi escolhido por ser um software livre, ter ampla documentação,
interação com linguagens de programação e fácil criação de gráficos com
alta qualidade.
5.1.1 Simulador FITS
Os dados inseridos no simulador para resultar os gráficos foram:
•
Mínimo tamanho segmento = 20
•
Máximo tamanho segmento = 1000
•
Tamanho da memória = 4000
57
Figura 15: Gráfico com algoritmos de alocação
Analisando o gráfico pode-se constatar que o algoritmo de alocação de
páginas BEST-FIT possui um menor número de faltas de páginas.
58
5.1.2 Simulador TSM
Os dados inseridos para resultar neste gráfico foi um arquivo de
processos com tamanho variado e um tamanho de memória de 10 páginas.
59
Figura 16: Gráfico com algoritmos de páginas com 50 páginas
Figura 17: Gráfico com algoritmos de páginas com 100 páginas
60
Figura 18: Gráfico com algoritmos de páginas com 200 páginas
Figura 17: Gráfico com algoritmos de páginas com 500 páginas
61
Figura 19: Gráfico com algoritmos de páginas com 1000 páginas
Figura 20: Gráfico com algoritmos de páginas com 2000 páginas
62
Analisando os gráficos acima se pode concluir:
•
Como diz a teoria o algoritmo Ótimo (OPT) é o que sempre apresenta
um menor número de faltas de páginas em todos os casos e deve ser
usado para testes de comparação com algoritmos.
•
O LFU apresentou a segunda melhor pontuação nos gráficos acima.
•
Em terceiro lugar ficou o NUR.
•
E como já era esperado em último lugar ficou o FIFO e penúltimo
lugar ficou o SC.
5.1.3 Outras pesquisas
As imagens abaixo foram resultados de estudos por pesquisadores,
publicados em artigos científicos.
Figura 21: Gráfico do algoritmo ARC (MEGIDDO e MODHA, 03/2003)
No gráfico acima P1 e P2 são dois processos diferentes em execução,
pode-se concluir que o algoritmo ARC apresenta um número maior de faltas
de páginas que o LRU.
63
Figura 22: Gráfico do algoritmo CAR (BANSAL e MODHA)
No gráfico acima é feito uma comparação do algoritmo CAR com o
CLOCK com base na falta de páginas. P1 e P2 são dois processos diferentes.
No gráfico pode se constatar que o algoritmo car possui uma maior falta de
páginas que o algoritmo clock.
64
Figura 23: Gráfico do algoritmo CLOCK-PRO (JIANG et al.)
NO gráfico acima foi comparado a aplicação applu e blizzard com
diversos tipos de algoritmos. O CLOCK-PRO obteve o segundo menor
resultado em primeiro lugar ficou o OPT.
65
6
CONCLUSÃO
O projeto de gerenciamento de memória é definido pelo hardware e
pelo software. No hardware é definido como será feito o sistema de
memória com tecnologias de circuitos, como por exemplo a memória virtual
implementada em hardware. Com o software tem que ocorrer um controle
dos
recursos
da
memória
do
hardware
pelo
software,
além
de
implementação de funcionalidades que não estão presentes no projeto de
hardware. Portanto de nada adianta ter um melhor algoritmo de
gerenciamento de memória, se o hardware não te ajudar no processo de
funcionamento.
Com os algoritmos de alocação de páginas foi concluído que o
algoritmo BEST-FIT tem um número menor de faltas de páginas que os
algoritmos FIRST-FIT e NEXT-FIT, porém esse número de diferença entre eles
foi pequeno. Na implementação de um algoritmo de alocação de páginas
em um sistema operacional a melhor opção é usar o algoritmo FIRST-FIT,
pois, possui uma grande velocidade e tende a causar menos o problema da
fragmentação.
Na simulação de algoritmos por software o algoritmo Ótimo sempre
terá um melhor desempenho. Por isso este algoritmo é aplicado com base
para o teste de novos algoritmos. Qualquer algoritmo existente ou que
possa surgir será no máximo igual aos resultados do Ótimo.
O algoritmo FIFO e o seu primo SC apresentam um alto número de
faltas de páginas, assim sendo eles são poucos usados no gerenciamento
de memória.
Com base nos estudos realizados foi constatado que o algoritmo LRU
apresenta um melhor índice de falta de páginas implementável. Por isso ele
é o algoritmo mais usado para a substituição de páginas em sistemas
operacionais. Um bom exemplo disso é o uso dele no Linux.
66
6.1 Trabalhos Futuros
Este trabalho oferece uma boa base de como um sistema de memória
de computadores funciona, além de estudar os algoritmos de alocação e
substituição de páginas. Com isto é possível implementar um componente
de gerenciamento de memória em um kernel de um sistema operacional ou
ainda realizar um estudo mais aprofundado dos algoritmos de memória.
Figura 24: Arquitetura de um kernel
67
REFERÊNCIAS BIBLIOGRÁFICAS
CASSETTARI,
Hugo
Henrique;
MIDORIKAWA,
Edson
Toshimi.
Algoritmo
de
Substituição de Páginas 3P: Acrescentando Adaptatividade ao Clock. XXV
Congresso da Sociedade Brasileira da Computação. 22 a 29 de julho.
CIC, Departamento de Ciência da Computação. Organização da Memória.
Departamento
de
Ciência
da
Computação
[CIC]
Disponível
em:
<http://www.cic.unb.br/docentes/jacobi/ensino/OAC/Memoria.pdf > Acesso em 28
out. 2005.
COTUCA, Colégio técnico de Campinas/Unicamp. Sistemas Operacionais. UNICAMP
-
COLÉGIO
TÉCNICO
DE
CAMPINAS
–
COTUCA.
Disponível
em:
<http://www.cotuca.unicamp.br> Acesso em 26 out. 2005.
CHELLO, chello breedband internet - kabel en adsl, games, films en TV. pictures.
Disponível em: <http://members.chello.nl/mlampers/Pictures2.htm> Acesso em 12
dez. 2005.
DODONOV, Evgueni. Um Mecanismo Integrado de Cache e Prefetching para
Sistemas de Entrada e Saída de Alto Desempenho. Dissertação (Mestrado em
computação) – Universidade Federal de São Carlos.
ETSI2, ETS Ingenieria Informática – Granada. ENIAC (Electronic Numerical
Integrator
and
Computer).
Disponível
em:
<http://www-
etsi2.ugr.es/alumnos/mlii/eniac.htm> Acesso em 12 dez. 2005.
JIANG, Song; CHEN, Feng; ZHANG, Xiaodong. CLOCK-Pro: An Effective Improvement
of the CLOCK Replacement.
MACHADO, Francis Berenger; MAIA, Luiz Paulo. Arquitetura de Sistemas
Operacionais. 3ª ed. Rio de Janeiro: LTC, 2002.
MEGIDDO, Nimrod; MODHA, Dharmendra S.. A Simple Adaptative Cache Algorithm
Outperforms LRU. IBM Research Report. Feb. 2003.
MEGIDDO, Nimrod; MODHA, Dharmendra S. ARC: A Self-Tuning, Low Overhead
Replacement Cache. USENIX File & Storage Technologies Conference (FAST),
March 31, 2003, San Francisco, CA.
MEGIDDO, Nimrod; MODHA, Dharmendra S. one up on LRU. Ago. 2003.
MEGIDDO, Nimrod; MODHA, Dharmendra S. Outperforming LRU with an Adaptative
Replacement Cache Algorithm. 2004.
MURDOCCA, Miler J.; HEURING, Vicent P.. Introdução à arquitetura de
computadores. Rio de Janeiro: Campus, 2000.
68
MCCRAW, Terrance. Virtual Memory Page Replacement Algorithms.
OLIVEIRA, Rômulo Silva; CARISSIMI, Alexandre da Silva; TOSCANI, Simão Sirineo.
Sistemas Operacionais. 2ª ed. Porto Alegre: Sagra Luzzatto, 2001.
SEDMAK, Stephen. Memory Management. 1997.
SILBERSCHATZ, Abraham; GALVIN, Peter; GAGNE, Greg. Sistemas operacionais:
conceitos e aplicações. Rio de Janeiro: Campus, 2000.
SILBERSCHATZ, Abraham; GALVIN, Peter Baer; GAGNE, Greg. Operating system
concepts. 6º ed. John Wiley & Sons, 2002.
STALLINGS, Willian. Arquitetura e organização de computadores. 4ª ed. São
Paulo: Prentice Hall, 2002.
TANENBAUM, Andrew S.; WOODHULL, Albert S.. Sistemas Operacionais: projeto
e implementação. 2ª ed. Porto Alegre: Bookman, 2000.
TANENBAUM, Andrew S.. Sistemas operacionais modernos. 2º ed. São Paulo:
Prentice Hall, 2003.
URI, Universidade Regional e Integrada do Alto Uruguai e das Missões Gerencia da
memória real. URI – Universidade Regional e Integrada do Alto Uruguai e
das Missões. Disponível em: <http://www.uri.com.br/~chg/sisop1/memoria.pdf>
Acesso em 27 out. 2005.