Congresso de Inovação, Ciência e Tecnologia do IFSP - 2016
SISTEMA DE MEDIÇÃO DE FORÇA COM SENSOR DE EFEITO HALL
JULIANA H. PERONI1, ALEXANDRE B. CAMPO2
1
Graduanda em Engenharia de Controle e Automação, Bolsista PIBIFSP,
IFSP,
[email protected]
2
Docente do Departamento de Engenharia Elétrica, IFSP, Câmpus São Paulo, [email protected]
Câmpus
São
Paulo,
Área de conhecimento (Tabela CNPq): Transdutores para Aplicações Biomédicas - 3.13.02.02-5
Apresentado no
7° Congresso de Iniciação Científica e Tecnológica do IFSP
29 de novembro a 02 de dezembro de 2016 - Matão-SP, Brasil
RESUMO: Neste projeto está sendo desenvolvido um sensor mole e vestível dedicado à medição de
força exercida em cada uma das pernas durante o exercício praticado numa cadeira extensora. O
sistema é uma célula de carga e ficará entre o tornozelo e o suporte da cadeira extensora e será capaz
de medir a força aplicada no momento da ação simultânea durante a extensão das articulações do
joelho. O desenvolvimento do sensor está sendo feito com o estudo do material que o compõe, pois
deve ser leve e complacente. Nesse material será acoplado um sensor de Efeito Hall, sendo que este
será utilizado para a medição do campo magnético de um ímã permanente, colocado próximo ao
sensor de Efeito Hall. Quando o praticante exercer uma força no sistema e aproximar o sensor e o imã,
será gerada uma diferença de potencial elétrico que está relacionada à distância entre os dois
componentes do sistema. A densidade do campo magnético do imã irá gerar diferentes tensões em
função da distância. O sistema está sendo modelado e calibrado para que a tensão gerada pelo sensor
seja proporcional à força aplicada. O resultado deverá quantificar as assimetrias apresentadas ao longo
de todo o percurso, sendo os dados enviados sem fio (conexão Bluetooth) para um microcontrolador,
responsável por analisar os dados.
PALAVRAS-CHAVE: Sensor de efeito Hall; Medição de força; biomecânica.
FORCE MEASURING SYSTEM WITH HALL EFFECT SENSOR
ABSTRACT: The present work describes a soft wearable system designed to measure the forces in
each leg during physical exercises performed in a seated leg curl machine. The system is composed by
two sensors attached to the anterior portion of the ankle so that it can measure the force applied by the
lower segment of each leg to the machine in order to perform knee joint extension. The development
of the sensor is being done with the study of the material, because it must be a soft wearable system.
Force is measured using a Hall Effect sensor and a magnet fixed to the opposite side of the sensor. The
force applied to the system results in the movement of the magnet toward the sensor, creating a
voltage that can be measured. The density of the magnetic field is related with the analog voltage. The
system is being modeled and calibrated so that the voltage generated by the sensor is proportional to
the applied force. The result would be the quantification of asymmetry presented over the entire route
and this information will be transmitted wirelessly (Bluetooth connection) to a microcontroller
responsible for analyzing and processing the received data.
KEYWORDS: Hall effect sensor; force measurement; biomechanics.
INTRODUÇÃO
Estudos mostram que a assimetria na capacidade de gerar força com os membros inferiores está
associada à assimetria de parâmetros cinemáticos da marcha humana, ao aumento do risco de quedas
em idosos (LaRoche et al. 2012), bem como à maior incidência de lesões musculoesqueléticas em
atletas (Barreira et al. 2015). O método utilizado para verificar possíveis assimetrias na geração de
força é baseado em dinamometria isocinética. Todos os aparelhos comerciais de dinamometria
isocinética permitem a execução da tarefa com apenas um membro por vez. Ou seja, mede-se a força
máxima gerada por um membro e então se ajusta o aparelho para medir a força máxima gerada pelo
membro contralateral. Este método, amplamente utilizado, é falho por não permitir que ambos os
membros gerem força simultaneamente ao longo de uma trajetória angular pré-determinada. Se isto
fosse realizado, a informação gerada seria muito mais completa do que um índice de assimetria.
O projeto consiste de um módulo vestível utilizando uma tornozeleira que incorpora um sensor
de baixo custo - custo de 1/20 em relação àqueles descritos em artigos e patentes pesquisados - para
medir a deformação do material utilizado para aplicar a força. Os sensores de força montados em cada
perna são constituídos de um sensor de Efeito Hall, bem como um ímã permanente posicionado
convenientemente no interior de um material flexível, o que permite o dispositivo ser vestível,
garantindo fácil manuseio e complacência.
MATERIAL E MÉTODOS
O sistema consiste em uma célula de carga que ficará entre o tornozelo e o suporte da cadeira
extensora e será capaz de aferir a força aplicada no momento da ação simultânea durante a extensão
das articulações do joelho. O material que está sendo utilizado para acoplar o sistema é a borracha de
silicone, que é um elastômero bi-componente, vulcanizável à temperatura ambiente e que - após a
adição de catalisador - resulta num produto elástico e resistente. Nesse material é acoplado um sensor
de Efeito Hall, sendo que este será utilizado para a medição do campo magnético de um ímã
permanente, tal imã é colocado do lado oposto ao sensor de efeito Hall. Quando o praticante exercer
uma força no sistema e aproximar o sensor e o imã, irá gerar uma diferença de potencial (DDP). A
densidade do campo magnético do imã irá gerar diferentes tensões, em volts, considerando a
proximidade entre o sensor e o ímã.
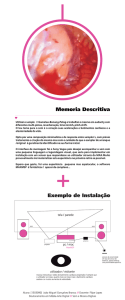
O esquema abaixo foi desenvolvido para explicar como será o dispositivo em estudo, contendo
a cadeira extensora, o movimento executado pelas pernas e a deformação do sensor vestível, como
mostrado na Figura 1.
Figura 1: Vista lateral em corte do dispositivo desenvolvido. Fonte: Autor
Na Figura 1 são destacadas as três partes do sensor: 1 - ímã permanente, 2 - material flexível e
3 - Sensor de Efeito Hall. Na Figura 3 é possível ver os componentes com mais clareza, além de
apresentar a faixa que ficará acoplada no tornozelo do praticante da cadeira extensora.
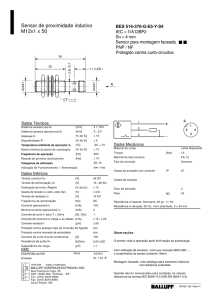
Figura 2: Vista superior do sensor acoplado à faixa. Fonte: Autor
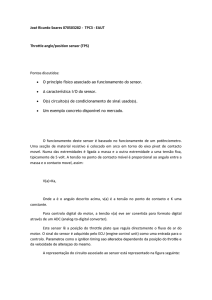
Os componentes eletrônicos que estão sendo utilizados para a medição do campo magnético são
fabricados pela Allegro e seus códigos são: A1301 e A1302, conforme apresentado na Figura 3. São
sensores de Efeito Hall lineares de tempo contínuo, com sua tensão de saída dependente da tensão de
entrada. Eles foram projetados para prover precisamente uma tensão de saída proporcionalmente ao
campo magnético aplicado. O ponto de tensão quiescente está como padrão à 50% da entrada, e para
os dois modelos a diferença significativa é a sensibilidade: enquanto o A1301 opera a 2.5 mv/G, o
A1302 opera a 1.3 mv/G.
Figura 3: Sensor de Efeito Hall nos formatos SMD e convencional. Fonte: Allegro datasheet
A1301/A1302 2005-2006
RESULTADOS E DISCUSSÃO
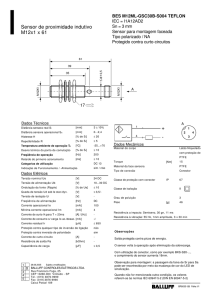
Para a montagem do experimento está sendo utilizado um sensor de efeito Hall, composto de
um ground (fio preto), um VCC (fio vermelho) e um pino analógico (fio roxo). Os fios foram
devidamente conectados ao sistema de aquisição baseado no Arduino Uno, como mostrado na Figura
4. Além disso, há três camadas de elastômero. Na primeira está sendo simulada uma força em
Newtons (N), embaixo dessa camada há o sensor de efeito hall. Em seguida há uma segunda camada
de elastômero, em que de um lado temos o sensor e do outro (abaixo) há um ímã permanente, o
terceiro elastômero tem a função de proteger o ímã permanente e não incomodar o usuário durante a
execução do movimento na cadeira extensora. Tal sistema foi montado e os resultados, para diferentes
forças aplicadas, é visualizado no programa LabVIEW através de um gráfico.
Figura 4: Protótico do sistema montado. Fonte: Autor
O gráfico da figura 5, ilustra como a tensão está variando de acordo com a distância entre o
ímã permanente e o sensor. Essa distância é alterada através de uma força aplicada no primeiro
elastômero, como mostrado na Figura 4. O gráfico tem uma faixa de 5 V a 2,5 V para um lado do ímã
e de 2.5 V a 0 V para o outro lado do ímã. Logo, no caso da Figura 5, não está sendo aplicada
nenhuma força no elastômero, pois a amplitude está em torno de 2,5 V. Através desses dados é
possível montar uma tabela de Força (N) x Tensão (V).
Figura 5: Comportamento gráfico do sistema montado sem aplicação de força.
CONCLUSÕES
O projeto está em andamento e a partir deste momento pretende-se aperfeiçoar o protótipo
montado na Figura 4, colocando-o posteriormente em uma faixa para que o sistema possa ser
devidamente acoplado ao tornozelo, como mostrado na Figura 1, sendo confortável para o usuário.
Além disso, é necessário refazer os testes com diferentes forças aplicadas ao material para
gerar uma equação que calcule a força aplicada a partir da tensão medida no sensor. Tal equação será
baseada em dados experimentais. Os dados serão enviados via Bluetooth para o celular do praticante,
atendendo assim as necessidades do usuário em quantificar a força em cada perna.
O projeto é inovador, pois incorpora um sensor de baixo custo – valor estimado em 1/20
considerando aqueles descritos em artigos e patentes pesquisados - para medir a força através da
deformação do material.
AGRADECIMENTOS
Agradeço ao professor orientador Alexandre Brincalepe e ao Instituto Federal de São Paulo,
pela bolsa oferecida no programa PIBITI.
REFERÊNCIAS
BARREIRA P, DRUST B, R. MA, V.J. Asymmetry after Hamstring Injury in English Premier
League: Issue Resolved, Or Perhaps Not? Int J Sports Med. 2015 Feb 20.
BATISTA, L.H., CAMARGO, P.R., AIELLO, G.V. Avaliação da amplitude articular do
joelho: correlação entre as medidas realizadas com o goniômetro universal e no dinamômetro
isocinético. Revista brasileira de fisioterapia, 2006, vol.10, no.2, p.193-198.
DAIN, P. L., COOK, S. B., and MACKALA, K. Strength Asymmetry Increases Gait
Asymmetry and Variability in Older Women. Med Sci Sports Exerc. 2012 November.
KELEMENOVÁ, T., "Experimental Verification of Hall Effect Sensor Properties", in Journal
of Automation and Control, Vol. 3, no. 2, pp. 75-78, 2015.