SERVIÇO NACIONAL DE APRENDIZAGEM INDUSTRIAL
Escola de Educação Profissional SENAI “Plínio Gilberto Kröeff”
MECÂNICA TÉCNICA
Professor: Dilmar Cordenonsi Martins
Curso: Mecânica de Precisão
São Leopoldo
2009
1
SUMÁRIO
1CÁLCULO APLICADO ............................................................................................ 03
1.1 UNIDADES DE MEDIDAS ..................................................................................... 03
1.2 SISTEMAS DE UNIDADES ................................................................................... 04
1.3 NOTAÇÃO CIENTÍFICA ........................................................................................ 06
1.4 PREFIXOS SI........................................................................................................... 07
1.5 TEOREMA DE PITÁGORAS .................................................................................. 07
1.6 TRIGONOMETRIA ................................................................................................. 09
1.7 REGRA DE TRÊS.................................................................................................... 11
1.7.1 Regra de Três Direta............................................................................................ 11
1.7.2 Regra de Três Inversa......................................................................................... 12
1.8 SISTEMA DE EQUAÇÕES ..................................................................................... 14
1.8.1 Método da Adição ................................................................................................ 14
1.8.2 Método da Substituição ....................................................................................... 16
1.9 ÁREA DE SUPERFÍCIES PLANAS ........................................................................ 18
1.10 VOLUME............................................................................................................... 20
2 VETORES.................................................................................................................. 27
2.1 GRANDEZAS FÍSICAS........................................................................................... 27
2.2 CONCEITO DE VETOR .......................................................................................... 27
2.3 VETORES IGUAIS E VETORES OPOSTOS ....................................................... 28
2.4 ADIÇÃO DE VETORES .......................................................................................... 28
2.4.1 Método do Paralelogramo ................................................................................... 28
2.4.2 Método do Polígono ............................................................................................. 30
2.4.3 Casos particulares da adição de vetores.............................................................. 30
2.5 PROJEÇÃO DE UM VETOR NUM EIXO............................................................... 32
2.6 COMPONENTES DE UM VETOR.......................................................................... 33
2.7 ADIÇÃO DE VETORES PELO MÉTODO DAS PROJEÇÕES ............................... 34
3 INTRODUÇÃO À CINEMÁTICA .......................................................................... 40
3.1 VELOCIDADE MÉDIA ( vm ) ................................................................................. 40
3.2 ACELERAÇÃO MÉDIA ( am) ................................................................................. 41
4LEIS DE NEWTON.................................................................................................. 43
4.1 INÉRCIA.................................................................................................................. 43
2
4.2 PRIMEIRA LEI DE NEWTON OU PRINCÍPIO DA INÉRCIA............................... 44
4.3 SEGUNDA LEI DE NEWTON OU PRINCÍIPIO FUNDAMENTAL ...................... 45
4.4 TERCEIRA LEI DE NEWTON - PRINCÍPIO DA AÇÃO E REAÇÃO ................... 47
5 FORÇA DE ATRITO ................................................................................................ 49
5.1 FORÇA DE ATRITO ESTÁTICO............................................................................ 50
5.2 FORÇA DE ATRITO DINÂMICO........................................................................... 51
5.3 INFLUÊNCIA DA RESISTÊNCIA DO AR ............................................................. 52
6 PLANO INCLINADO ............................................................................................... 54
7 EQUILÍBRIO DE UM PONTO MATERIAL ...................................................... 57
8 MOMENTO DE UMA FORÇA OU TORQUE................................................... 60
8.1CONCEITO............................................................................................................... 60
8.2 CONVENÇÃO DE SINAIS DO MOMENTO .......................................................... 61
8.3 BINÁRIO ................................................................................................................. 63
9 VÍNCULOS................................................................................................................ 67
9.1 CLASSIFICAÇÃO DOS VÍNCULOS ...................................................................... 67
9.2 EFICÁCIA VINCULAR........................................................................................... 68
9.3 CLASSIFICAÇÃO ESTRUTURAL ......................................................................... 69
10 EQUILÍBRIO DE UM CORPO EXTENSO........................................................... 71
10.1 CONDIÇÕES DE EQUILÍBRIO ............................................................................ 71
10.2 CÁLCULO DE REAÇÕES EM ESTRUTURAS ISOSTÁTICA
POR APLICAÇÃO DAS EQUAÇÕES DE EQUILÍBRIO DA MECÂNICA ................ 71
REFERÊNCIAS ........................................................................................................... 76
3
1 CÁLCULO APLICADO
1.1 UNIDADES DE MEDIDAS
Medir uma grandeza física significa compará-la com outra grandeza de mesma
espécie, tomada como padrão. Este padrão é a unidade de medida.
Unidades de comprimento
Nome
Símbolo
quilômetro hectômetro decâmetro
km
hm
dam
metro
m
decímetro centímetro milímetro
dm
cm
mm
Unidades de Área
Nome
Símbolo
quilômetro hectômetro decâmetro metro decímetro centímetro milímetro
quadrado quadrado quadrado quadrado quadrado quadrado quadrado
km²
hm²
dam²
m²
dm²
cm²
mm²
Unidades de Volume
Nome
quilômetro hectômetro decâmetro metro decímetro centímetro milímetro
cúbico
cúbico
cúbico
cúbico
cúbico
cúbico
cúbico
Símbolo
km³
hm³
dam³
m³
dm³
cm³
mm³
Nome
quilolitro
hectolitro
decalitro
litro
decilitro
centilitro
mililitro
Símbolo
kl
hl
dal
l
dl
cl
ml
4
Unidades de Massa
Nome
quilograma hectograma decagrama grama decigrama centigrama miligrama
Símbolo
kg
hg
dag
g
dg
cg
mg
1.2 SISTEMAS DE UNIDADES
Sistema Internacional de Unidades
No Brasil, o sistema de unidades adotado oficialmente é o Sistema Internacional (SI).
De acordo com o SI, há sete unidades fundamentais, conforme o quadro abaixo.
UNIDADES FUNDAMENTAIS DO SI
GRANDEZA
NOME
SÍMBOLO
metro
m
massa
quilograma
kg
tempo
segundo
s
intensidade de corrente elétrica
ampère
A
temperatura termodinâmica
kelvin
K
quantidade de matéria
mol
mol
intensidade luminosa
candela
cd
comprimento
A partir das unidades fundamentais, derivam-se as unidades de outras grandezas, que
recebem, então, a denominação de unidades derivadas.
No estudo da Mecânica, adota-se um subconjunto do SI conhecido como sistema
MKS.
5
comprimento
M
m (metro)
SISTEMA MKS
massa
K
kg (quilograma)
tempo
S
s (segundo)
Sistema CGS
Na Mecânica também é utilizado o sistema CGS.
comprimento
C
cm (centímetro)
SISTEMA CGS
massa
G
g (grama)
tempo
S
s (segundo)
EXERCÍCIOS - CONVERSÃO UNIDADES DE MEDIDAS
1) Converter:
a) 6,316 m __________________cm
b) 56 dm _______________________ hm
c) 45 000 000 mm² ____________ m²
d) 8,915 dam² ___________________ dm²
e) 1538,7 cm³ _______________ dm³
f) 6 dam³________________________ m³
g) 832000 mm³ ______________ ml
h) 75100 cl ______________________ m³
i) 6,43 kg ___________________ g
j) 3817,3 dg ____________________dag
2) Converter para o Sistema Internacional de Unidades (SI) as unidades abaixo:
a) 2,37 cm ________________
b) 8 000 dm² ____________________
c) 82 dam³ _______________
d) 34781,6 dg ____________________
6
3) Utilizando os fatores de conversão das tabelas, converter:
a) 50 in em cm ________________
b) 25 cm em in _____________________
c) 75 kg em onça____________
d) 240 lb em kg____________________
e) 40 kgf em N ________________
f) 6 atm em N/m²___________________
1.3 NOTAÇÃO CIENTÍFICA
Uma maneira prática de escrevermos números com grande quantidade de zeros é a
notação científica, na qual se utilizam as potência de dez .Qualquer número real pode ser
escrito como o produto de um número, cujo módulo está entre 1 e 10 (incluindo o 1), por
outro, que é uma potência de dez com expoente inteiro (10x ).
Notação Científica
( 1 ≤ N < 10 ). 10x
N = número compreendido entre 1 e 10
x = expoente inteiro
Exemplos:
1º caso: O número maior que 1
35 000 000 = 3,5.107
O expoente do dez indica o número de vezes que devemos deslocar para a direita a vírgula.
2º caso: O número é menor que 1
0,000469 = 4,69. 10-4
O expoente negativo do dez indica o número de vezes que devemos deslocar a vírgula para a
esquerda.
EXERCÍCIOS
Coloque os números seguintes em forma de notação científica.
1) 358 000
2) 0,0015
3) 0,0000000957
4) 8 341 000 000
5) 141.103
6) 0,0064.10-2
7) 8752,4
9) 265,7. 105
10) 45000.10-2
7
1.4 PREFIXOS SI
Nome
exa
peta
tera
giga
mega
quilo
hecto
deca
deci
centi
mili
micro
nano
pico
femto
atto
Símbolo
E
P
T
G
M
k
h
da
d
c
m
µ
n
p
f
a
Fator de Multiplicação
1018
1015
1012
109
106
103
102
10
10-1
10-2
10-3
10-6
10-9
10-12
10-15
10-18
1.5 TEOREMA DE PITÁGORAS
O quadrado da hipotenusa é igual a soma do quadrado dos catetos.
b
Essa relação vale para todos os triângulos retângulos.
a
cateto
hipotenusa
cateto
c
8
Hipotenusa : lado maior do triângulo retângulo
a 2 = b2 + c 2
EXERCÍCIOS
1) A diagonal "d" de um retângulo cujos lados medem 16 cm e 12 cm é:
a)
b)
c)
d)
e)
17 cm
18 cm
19cm
20 cm
21 cm
d
12 cm
16 cm
2) O valor de x do triângulo abaixo é igual a:
a) 3
3
b)
c) 4
d) 5
e)
5 3 cm
10 cm
5
.
x
3) Uma torre vertical é presa por cabos de aço fixos no chão, em um terreno plano
horizontal, conforme mostra a figura. Se A está a 15 m da base B da torre e C está a 20 m de
altura, o comprimento do cabo AC é:
a)
b)
c)
d)
e)
15 m
20 m
25 m
35 m
40 m
C
A
B
9
1.6 TRIGONOMETRIA
C
a
c
α
b
A
B
Hipotenusa → lado maior do triângulo retângulo = a
Cateto adjacente ao ângulo α: lado que forma o ângulo α juntamente com a hipotenusa = b
Cateto oposto ao ângulo α = c
Relações Trigonométricas no Triângulo Retângulo
SENO DE UM ÂNGULO
sen  = sen α =
cateto oposto
c
=
a
hipotenusa
sen  = seno do ângulo Â
ou
sen α = seno do ângulo α
CO-SENO DE UM ÂNGULO
cos  = cos α =
b
cateto adjacente
=
a
hipotenusa
10
TANGENTE DE UM ÂNGULO
tg  = tg α =
c
cateto oposto
=
cateto adjacente b
EXERCÍCIOS
1) Determine o valor de X dos triângulos retângulos abaixo.
a)
b)
20 cm
X
X
53º
30º
12 cm
2) Um fio vai ser esticado do topo de um prédio até um ponto no chão, conforme indica a
figura. Considerando sen 37º = 0,6 ; cos 37º = 0,8 e tg 37º = 0,75, determine o comprimento
do fio.
37º
42 m
11
3) Qual é a altura da igreja, sabendo-se que a distância do ponto A até o ponto B é 100 m.
B
37º
A
4) No triângulo retângulo abaixo, é verdadeira a igualdade:
s
t
t
b) sen α =
r
s
c) cos α =
r
t
d) cos α =
r
s
e) tg α =
r
a) sen α =
r
s
α
.
t
1.7 REGRA DE TRÊS
1.7.1 Regra de Três Direta
Exemplo:
Em 12 m2 de parede foram utilizados 540 tijolos. Quantos tijolos serão necessários
para construir 20 m2 de parede ?
Relação: mais m2 de parede mais tijolos - Relação MAIS - MAIS
12
A relação Mais-Mais ou Menos-Menos caracteriza a regra de três direta. Na regra
de três direta multiplicamos cruzado.
12 m2
540 tijolos
20 m2
X
X . 12 = 20 . 540
→
X . 12 = 10800
→
X=
10800
→
12
X = 900 tijol.os.
1.7.2 Regra de Três Inversa
Exemplo: Uma casa é construída por 20 pedreiros em 30 dias. Em quantos dias será
construída a mesma casa se o número de pedreiros aumentar para 50?
Relação: mais operários menos dias
A relação Mais - Menos ou Menos – Mais caracteriza a regra de três inversa.
Na regra de três inversa multiplicamos lada a lado.
20 operários
30 dias
50 operários
X
50 . X = 20 . 30 →
50X = 600 →
X=
600
50
→ X = 12 dias
EXERCÍCIOS
1) Uma máquina produz 100 peças em 5 horas. Quantas peças produz em 2 horas?
2) Uma ponte é feita em 120 dias por 16 trabalhadores. Se o número de trabalhadores for
reduzido para 10, qual o número de dias necessários para a construção da mesma ponte ?
3) Duas polias, ligadas por uma correia, têm raios 20 cm e 50 cm. Supondo que a
maior efetua 100 rpm, qual a rotação da polia menor ?
polia
13
1.8 SISTEMA DE EQUAÇÕES
1.8.1
Método da Adição
Elimina-se uma das incógnitas somando algebricamente a equação de cima com a
equação de baixo.
Exemplo 1
- 3X + Y = 14
4X – Y = 8
Adicionando as equações membro a membro, temos:
- 3X + Y = 14
4X – Y = 8
X + 0Y = 22
→
X = 22
Achando X, podemos determinar o valor de Y na 1ª ou na 2ª equação.
-3X + Y = 14
→ X = 22
- 3. (22) + Y = 14
Y = 14 + 66 →
- 66 + Y = 14 →
Y = 80
Exemplo 2
4X + 3Y = 6
2X + 5Y = -4
Nesse exemplo não adianta somar as equações, pois nem X nem Y serão cancelados.
Devemos preparar o sistema de modo que os coeficientes de uma das incógnitas
fiquem simétricos, por exemplo X. Para conseguir que os coeficientes fiquem simétricos,
podemos multiplicar a 2ª equação por (-2).
Obs.:
Uma igualdade não se altera quando multiplicamos todos os seus temos
pelo mesmo número
14
4X + 3Y = 6
2X + 5Y = -4
multiplicando todos os termos da equação por (-2), temos:
4X + 3Y = 6
-4X - 10Y= +8
Somando-se as equações, encontramos:
- 7 Y = 14 → - 14 = 7Y → − 14 = Y →
Y = -2
7
Substituindo-se o valor de Y na 1ª equação, tem-se:
4X + 3(-2) = 6
4X – 6 = 6
→
→ 4X = 6+ 6 → 4X = 12 → X =
12
4
X=3
Exemplo 3
2a + 4b = 9
3a - 5b = 7
Para ajustar as equações para que uma das incógnita se anule podemos multiplicar a
1ª equação por -3 e a 2ª equação por 2.
2a + 4b = 9
x (-3)
3a - 5b = 7
x (2)
- 6a - 12b = -27
6a - 10b = 14
0a - 22b = - 13
13 = 22b →
2a + 4b = 9
b=
13
22
→ 2a + 4(
13
52
) = 9 → 2a +
=9
22
22
→ 2a = 9 -
52
22
15
73
2a =
→
11
1.8.2
73
a = 11
2
→
a=
73
22
Método da Substituição
X + Y = 11
2X – 4Y = 10
Escolhemos uma das equações, a 1ª equação, por exemplo, e isolamos uma das incógnitas.
X + Y = 11 →
X = 11 - Y
Tomamos a outra equação do sistema (2ª equação) e substituindo X pela expressão que
obtivemos anteriormente, temos:
2X – 4Y = 10
2 ( 11 – Y ) – 4Y = 10 → 22 – 2Y – 4Y = 10 →
12 = 6Y →
12
=Y →
6
22 – 6Y = 10 → 22 – 10 = 6Y
Y=2
Substituindo-se Y pelo seu valor na equação X = 11 – Y , encontramos:
X = 11 – Y
→
X = 11 – 2
→
X=9
16
EXERCÍCIOS
Resolva os sistemas seguintes pelo método que achar mais conveniente.
1.
- X + 4Y = 3
6X – 2Y = 26
2.
2a + b = -4
3a + 6b = -15
3.
2X + 3Y = 14
3X + 2Y = 11
17
1.9 ÁREA DE SUPERFÍCIES PLANAS
A = a2
A = a.b
A=
A=
a.h
2
A = a.h
( B + b).h
2
A=
α em graus
A = π.R
2
A=
2
2
A = π.(R – r )
α .π .R
360
D.d
2
α
em radianos
2
A=
α em radianos
R2
A=
.(α − senα )
2
α .R 2
2
18
EXERCÍCIOS
1) Na figura AB = 2,0 cm; CF = 8,0 cm; DE = 5,0 cm; AF = 3,0 cm e FE = 3 cm.
Determine a área do polígono ABCDE, em cm2.
C
D
B
A
F
E
2) Um terreno tem a forma e as dimensões especificadas na figura abaixo. A área desse
1200 m²
1000 m²
600 m²
500 m²
360 m²
20 m
a)
b)
c)
d)
e)
30 m
terreno é:
24 m
3) Calcule a área das superfícies planas pintadas abaixo.
Raio r = 10 cm
18 cm
10 cm
A)
B)
r
30 cm
42 cm
34 cm
19
1.10 VOLUME
a
c
a
a
a
b
V = a.b.c
V = a3
h
r
d
V = π. r2. h
V=
π .d 3
6
h
h
r
r
r
2
V=
π .r .h
3
V=
π .h
3
.( R 2 + r 2 + R.r )
h
h
Ab
AB
Ab
1
V = . Ab. h
3
V=
h
.( AB + Ab + AB . Ab )
3
20
EXERCÍCIOS
1) Quantos litros de água cabem num reservatório que tem a forma de um bloco retangular
com dimensões de 3 m x 1,5 m x 1,2 m.
1,5 m
3m
1,2 m
2) O cilindro representado na figura tem raio de 3 m e altura igual a 4m. Determine o seu
volume.
3) Um cubo X tem 2 m de aresta e um cubo Y tem 1 m de aresta. Então, o volume do cubo
X é igual a:
a) duas vezes o volume de Y
b) três vezes o volume de Y
c) quatro vezes o volume de Y
d) seis vezes o volume de Y
e) oito vezes o volume de Y
a
a
a
21
EXERCÍCIOS COMPLEMENTARES
1) Efetue as conversões:
a) 12,781 m =________________cm
b) 2595,4 dm2 =_______________ dam2
c) 126 hm2 = _______________m2
d) 57000 mm3 = ________________ cm3
e) 28 cm³ =________________ cl
f) 135,1 mg = _________________ g
g) 15 in = __________________cm
h) 40 lb = ____________________ kg
i) 40 kgf = _________________N
j) 6 atm = ____________________ Pa
2) Converter para o Sistema Internacional de Unidades (SI) as unidades abaixo:
a) 1,947 hm _________________
b) 527 000 litros ___________________
c) 76500 cm2_________________
d) 2456,9 dg _______________________
3) Escreva os números abaixo na forma de notação científica
a) 0,0058___________________
b) 65 000 000 ________________________
4) De acordo com os dados da figura, determine a medida do segmento Y.
80 cm
60c m
.
Y
5) Qual é o valor da medida X no triângulos abaixo.
30 cm
a)
b)
X
X
30º
15 cm
53º
22
6) Uma pessoa está distante 60 m da base de um prédio e vê o ponto mais alto do prédio sob
um ângulo de 37º em relação a horizontal. Qual é a altura do prédio ?
7) Considere o triângulo da figura.
A
60º
B
45º
H
C
Dado AB = 20 cm , calcule a medida AC e AH
8) Transforme:
a) 150º em radianos
b) 5 π/6 rad em graus
9) Qual é a área da figura?
2m
2m
2m
5m
2m
5m
23
10) Calcule a área das superfícies planas abaixo.
a)
b)
20 cm
20 cm
14 cm
30 cm
8 cm
11) O reservatório da figura tem as seguintes dimensões internas: 5 m de comprimento,
2
de sua capacidade
2,4 m de altura e 1,5 m de largura. Estando com água até os
3
máxima, ele contém um volume de água correspondente a:
a) 21 m3
b) 12 m3
c) 18 m3
d) 8 m3
e) 6 m3
2,4 m
1,5 m
5m
12) Calcular o volume de um paralelepípedo retângulo cujos lados são 40 cm, 30 cm e 20
cm.
13) Calcular o volume de um cilindro de diâmetro 20 cm e altura 30 cm.
14) O volume de um cubo é 27 cm³. Calcule a medida da aresta do cubo.
a
a.
a
24
15) As raízes reais da equação
9x2 -
3x
= 0, são
2
a) 0 ou -6
b) 1 ou 3
1
c) 0 ou
6
d) 3 ou 6
2
ou 1
e)
3
16. Quais as raízes reais da equação 4x2 - 3x - 1 = 0 ?
x-y=5
17. O sistema
tem como solução:
2x + 3y = - 55
a) ( - 8 , -
1
)
2
b) ( -13, 4 )
c) ( - 4, -8)
d) ( - 8, -13 )
e) (- 4 , 8 )
18) Dezesseis máquinas foram alugadas para fazer um serviço de terraplanagem em vinte
dias. Porém seis dessas máquinas não puderam ser usadas por defeitos técnicos. Em
quantos dias as máquinas restantes fizeram o mesmo serviço?
19) O litro de gasolina comum custava R$ 2,00. Houve um aumento de 10 % no preço.
Após o aumento para encher um tanque de 40 litros são necessários:
a) R$ 80,00
b)R$ 84,00
c) R$ 88,00
d)R$ 92,00
e) R$ 94,00
25
20. O pneu de um veículo, com 800 mm de diâmetro, ao dar uma volta completa percorre,
aproximadamente, uma distância de:
a)
b)
c)
d)
e)
2,51 m
5,00 m
25,10 m
0,50 m
1,51 m
21. O perímetro do retângulo em figura é 30 cm.
Então x é igual a:
a)
b)
c)
d)
e)
5 cm
2 cm
4,5 cm
10 cm
7,5 cm
4x
3x+1
26
2
VETORES
2.1 GRANDEZAS FÍSICAS
A tudo aquilo que pode ser medido, associando-se a um valor numérico e a uma
unidade, dá-se o nome de grandeza física.
As grandezas físicas são classificadas em:
Grandeza
Escalar:
fica perfeitamente
definida (caracterizada)
pelo valor
numérico acompanhado de uma unidade de medida.
Exemplos: comprimento, área, volume, massa, tempo, temperatura, etc.
Grandeza Vetorial: necessita, para ser perfeitamente definida (caracterizada), de
um valor numérico, denominado módulo ou intensidade, acompanhado de uma unidade de
medida, de uma direção e de um sentido. Toda a grandeza Física Vetorial é representada
por um vetor.
Exemplos: Força, velocidade, aceleração, campo elétrico, etc.
2.2 CONCEITO
Vetor: é um símbolo matemático utilizado para representar o módulo, a direção e o sentido
de uma grandeza física vetorial. O vetor é representado por um segmento de reta orientado.
Módulo: é a medida do comprimento do segmento de reta orientado que o representa.
Direção: ângulo que o vetor forma com um eixo de referência. Determinada pela reta
suporte do segmento orientado.
Sentido: orientação do vetor.
Exemplo 1
r
Módulo: F = 30 N ou F = 30 N
P
Direção: 90º com o eixo horizontal X ou
direção Vertical
Sentido : de O para P ou Norte
r
F = 30 N
O
X.
27
Exemplo 2
P
O
r
v = 8 m/s
v
Módulo: v = 8 m/s
Direção: 55º com o eixo horizontal X
Sentido: de O para P
55º
X
2.3 VETORES IGUAIS E VETORES OPOSTOS
Vetores iguais: Dois ou mais vetores são iguais quando têm o mesmo módulo, a mesma
direção e o mesmo sentido.
Vetores opostos: Dois vetores são opostos quando têm o mesmo módulo, a mesma direção e
sentidos contrários.
2.4 ADIÇÃO DE VETORES
2.4.1 Método do Paralelogramo
Vetor Resultante: Vetor Resultante de vários vetores é o vetor que, sozinho, produz o
mesmo efeito que todos os vetores reunidas.
r
r
R = vetor resultante ou S = vetor soma
r
r
r
Sejam dois vetores F 1 e F 2 , formando entre si um ângulo α. O vetor soma S , também
r
r
r
r
r
chamado de vetor resultante R , é indicado por S ou R = F 1 + F 2.
r
F1
r
F2
28
Desenhamos os dois vetores com suas origens coincidentes. A partir da extremidade
r
r
do vetor F 1, traçamos um segmento de reta paralelo ao vetor F 2.
r
Em seguida, a partir da extremidade do vetor F 2, traçamos um outro segmento
r
paralelo ao vetor F 1. O vetor soma é obtido pela ligação do ponto de origem comum dos
vetores ao ponto de intersecção dos segmentos de reta traçados.
v
R
r
F1
α
r
F2
O módulo do vetor resultante é dado por:
r
R
r
= F1
2
2
r
+ F2
2
r
r
+ 2. F1 . F2
. cos α
Lei dos cossenos
ou
r
R =
v
v
v v
F1 2 + F2 2 +2. F1 . F2 . cos α
r
r
Exemplo - Dados os vetores a e b abaixo, de módulos iguais a 5 unidades e 9 unidades,
respectivamente.
Sendo
cos 60º =0,5 , represente graficamente,
r
paralelogramo o vetor soma S e calcule o seu módulo.
r
a
pela regra do
v
S
r
a
60º
r
b
v
S =
r
b
v
v
v v
a 2 + b 2 +2. a . b . cos α
v
S = 5 2 +9 2 +2.5.9. cos 60º =
25 + 81 + 90.0,5 =
25 + 81 + 45 = 12,29 u
29
2.4.2 Método do Polígono
A regra do polígono pode ser utilizada na adição de qualquer número de vetores. Para
a sua utilização devemos colocar os vetores de tal modo que a origem do segundo vetor
coincida com a extremidade do primeiro; a origem do terceiro coincida com a extremidade
do segundo; a origem do quarto coincida com a extremidade do terceiro; e assim
sucessivamente. O vetor soma ou vetor resultante é determinado ligando-se a origem do 1º
vetor à extremidade do último vetor, conforme mostra o exemplo abaixo.
r
r
r
r
Ex. Dadas as forças F 1 , F 2, F 3 e F 4 , cujos módulos são, respectivamente, 30
N, 50N, 40 N e 20 N, determine graficamente (método do polígono) a força resultante
r
r
r
r
r
R = F 1 + F 2 + F 3 + F 4. Escala: 1 cm = 10 N
r
F2
r
F1
r
F3
r
F4
r
F4
r
R ≅ 31 N
r
F3
r
F1
r
F2
2.4.3 Casos particulares da adição de vetores
1° ) Os vetores tem a mesma direção e o mesmo sentido ( α = 0º )
r
F1 = 4 N
r
v
v
R = F1 + F2
r
F2 = 3 N
r
F1
r
F2
v
R = 7N
v
R =4+3=7N
30
2º ) Os vetores tem a mesma direção e sentidos contrários ( α = 180º )
r
F1 = 7 N
r
v
v
R = F1 − F2
r
F2 = 3 N
r
F1
v
R =7-3=4N
r
F2
v
R = 4N
3º) Os vetores são perpendiculares entre si ( α = 90º )
r
F1
Triângulo retângulo “1”
Aplicando Pitágoras, temos:
r
R
1
r
F2
F1
R2 = ( F1 )2 + ( F2 )2
v
R =
r 2
v 2
F1 + F2
31
2.5 PROJEÇÃO DE UM VETOR NUM EIXO
Ex. 1
Y
rr
proj x F → projeção no eixo X da força F
r
Fy =0
rr
F = 30 N
proj x F = Fx = 30 N
proj y F = Fy = 0
r
Fx
X
Ex. 2
Y
r
Fy
proj x F = Fx = 0 N
v
F = 60 N
r
Fx = 0
proj y F = Fy = 60 N
X
CONVENÇÃO DE SINAIS PARA PROJEÇÕES DE VETORES
-
Eixo “X”
Orientação do vetor para a direita – positivo
Orientação do vetor para a esquerda - negativo
-
Eixo “Y”
Orientação do vetor para cima
Orientação do vetor para baixo
+
+
positivo
negativo
-
32
2.6 COMPONENTES DE UM VETOR
Todo o vetor pode ser obtido a partir da soma de dois outros vetores, perpendiculares
r
entre si, chamados de componentes do vetor dado. Assim, dado o vetor F = 100 N , ele pode
r
r
ser decomposto em dois outros vetores, Fx e Fy , que recebem o nome de componentes
r
retangulares ( ou componentes horizontal e vertical ) do vetor F .
Y
Y
r
F
β
r
Fy
2
β
α
r
F
1
α
r
Fx
X
Cálculo de Fx
Cálculo de Fy
Triângulo 1
Triângulo 2
cos α = cateto adjacente/ hipotenusa
cos β = cateto adjacente / hipotenusa
cos α =
Fx
F
cos α . F = Fx
Fx = F . cos α
cos β =
Fy
F
F. cos β = Fy
Fy = F. cos β
X
33
Cálculo de Fy usando o seno - Triângulo 1
sen α = cateto oposto / hipotenusa
sen α =
FY
F
Fy = F . sen α
→
r
Ex.1. Determinar os componentes horizontal e vertical do vetor F .
Y
r
F = 50 N
r
Fy
Fx = F cos α
Fx = 50 . cos 37º
Fx = 50 . 0,8 = 40 N
Fy = F. cos β
Fy = 50 .cos 53º
Fy = 50.0,6 = 30 N
53º
37º
r
Fx
X
r
Ex. 2. Determinar as componentes horizontal e vertical do vetor v representado abaixo.
Y
r
v
60º
X
2.7 ADIÇÃO DE VETORES PELO MÉTODO DAS PROJEÇÕES
Quando o sistema é formado por mais de dois vetores concorrentes e coplanares,
podemos determinar o vetor resultante pelo método das projeções de cada vetor em dois
eixos perpendiculares ( X e Y ).
34
Ex. Dadas as forças indicadas na figura, determine o módulo, a direção e o sentido da força
r r
v v
v
resultante R ( R = F 1+ F 2+ F 3 )
Y
r
F 2 = 20 N
r
F1 = 50 N
37º
X
r
F 3 = 40 N
1º ) Resultante em X
Rx = Σ proj x F
Rx = proj
x
F1 + proj
x
F2 + proj
Rx = 50 – 20 cos 37º + 0
x
F3
Rx = 50 – 20 . 0,8
Rx = 50 – 16
2º ) Resultante em Y
RY = Σ proj Y F
Ry = proj
RY =
y
F1 + proj
y
F2 + proj
0 + 20.cos 53º - 40
y
F3
RY = 20.0,6 – 40 = 12 – 40 = – 28
Rx = 34 N
35
3º) Cálculo do módulo do vetor resultante
Y
v
R =
Rx 2 + Ry 2
v
R =
34 2 + 28 2
r
RX
θ
r
RY
Direção: tg θ =
X
v
R
Ry
Rx
tg θ =
v
R = 1156 + 784
v
R = 44,04 N
28
= 0,823
34
θ ≅ 39º
Direção: aproximadamente 39º com o eixo X, sentido sudeste
EXERCÍCIOS - VETORES
1) Determine a intensidade e trace, pelo método do paralelogramo, o vetor soma
r
r r
S = a + b para o caso abaixo.
r
r
Dados: | a | = 10 cm , | b |= 8 cm, cos 60º = 0,5
r
b
60º
r
a
36
2) Nos casos a seguir, determine a força resultante que age sobre cada partícula, sabendo-se
r
r
que a intensidade das forças F 1 e F 2 são, respectivamente, 20 N e 50 N.
A)
B)
r
F2
•
r
F2
r
F1
r
F1
C)
D)
r
F1
r
F1
120º
r
F2
r
F2
r r r v
r r
v
3) Para os vetores a e b e c a seguir , determine graficamente o vetor S = a + b + c
r
b
r
a
v
c
r
4) Em cada caso determine as componentes retangulares do vetor F representado abaixo.
a)
Y
b)
.
Y
r
F = 50 N
r
F = 40 N
37º
X
X
c)
Y
Y
d)
r
F = 30 N
r
F = 40 N
.
60°
X
X
37
5) Determine o módulo, a direção e o sentido da força resultante que age sobre a partícula.
Y
F1 = 40 N
F2 = 30 N
F3 = 10 N
F4 = 50 N
r
F2
r
F3
53º
r
F1
60º
●
r
F4
X
EXERCÍCIOS COMPLEMENTARES
1) Determine para os casos abaixo a intensidade da força resultante e trace, pelo método do
paralelogramo, a sua direção e o seu sentido.
a)
b)
60 N
65º
100 N
38
2) Determine, o módulo, a direção e o sentido da força resultante das figuras abaixo.
a)
200 N
300 N
53º
37º
100 N
Y
b)
r
F 2 = 30 N
r
F 1 = 50 N
37º
r
F 3 = 60 N
X
r
F 4 = 80 N
39
3 INTRODUÇÃO À CINEMÁTICA
3.1 VELOCIDADE MÉDIA ( vm )
to
d=0
do
vm =
∆d
∆t
∆d = distância total percorrida
∆t = tempo gasto no percurso
do = posição inicial
d = posição final
to = instante inicial
t = instante final
Unidades – no SI
∆d – metro (m)
∆t – segundo (s)
v - m/s
t
∆d
vm
d − do
t − to
d
40
EXERCÍCIOS
1) Um automóvel, que trafega ao longo de uma rodovia, passa pelo marco de estrada 250 km
às 7 h e pelo marco 400 km às 10 h. Determine a velocidade escalar média, em km/h e m/s,
nesse intervalo de tempo.
2) Um veículo percorre, inicialmente, 50 km de uma estrada em 0,5 h. A seguir percorre
mais 120 km em 1h e 30 min. Determine a velocidade escalar média do veículo, em km/h,
durante todo o percurso.
3) Um caminhão, em um trecho inicial
não-pavimentado da estrada, desenvolve uma
velocidade de 40 km/h, gastando um tempo de 2h neste percurso. No trecho seguinte
(asfaltado), sua velocidade passa a ser 70 km/h, sendo mantida durante um tempo de 1 h.
a) Que distância total o caminhão percorreu?
b) Qual foi a velocidade média do caminhão nesta viagem?
3.2 ACELERAÇÃO MÉDIA ( am)
Quando um movimento apresenta variação da sua velocidade, ao longo do tempo, o
movimento é um movimento variado – apresenta aceleração.
Movimentos acelerados apresentam um aumento da velocidade e os retardados uma
diminuição da velocidade.
v
vo
to
v
t
41
am =
∆v
∆t
am =
v − v0
t − t0
∆v = variação da velocidade = v – vo
∆t = intervalo de tempo (variação do tempo) = t - to
vo = velocidade inicial
v = velocidade final
Unidades - no SI
v – m/s
t –s
a – m/s2
Aceleração é a grandeza física que relaciona a variação da velocidade com o tempo gasto
nessa variação.
Ex.: am = 5 m/s2 significa que a velocidade está variando, em média, de 5 m/s em cada 1
segundo.
EXERCÍCIOS
1) Partindo do repouso, um avião percorre a pista e atinge a velocidade de 360 km/h, em
25 s. Qual o valor da aceleração escalar média, em m/s2 ?
2) Um móvel se movimenta sobre uma trajetória retilínea e tem velocidade em função do
tempo, indicada pela tabela. Determine a aceleração média no intervalo de 0 a 10 s.
t(s)
0
2
4
6
8
10
v(m
/s)
8
16
24
32
40
48
42
4 LEIS DE NEWTON
4.1 INÉRCIA
A tendência natural dos corpos de manter seu estado de repouso ou de movimento
retilíneo e uniforme denomina-se de inércia, portanto inércia consiste na tendência natural
que os corpos possuem em manter velocidade constante.
Exemplo: Quando um ônibus arranca, o passageiro por inércia tende a permanecer em
repouso em relação ao solo terrestre. Como o ônibus movimenta-se para frente o passageiro
cai para trás, conforme figura.
No caso de um ônibus frear bruscamente os passageiros tendem a manter-se no seu
estado de movimento. Por isso as pessoas vão para a frente do ônibus. Na realidade, a
mudança do estado de movimento é do ônibus. Os passageiros tendem a manter-se como
estavam, ou seja, em movimento e o ônibus não.
43
4.2 PRIMEIRA LEI DE NEWTON OU PRINCÍPIO DA INÉRCIA
Todo o corpo continua no seu estado de repouso ou de movimento retilíneo uniforme,
a menos que seja obrigado a mudar esse estado por forças imprimidas sobre ele.
Podemos concluir, que um corpo livre de ação de forças, ou com força resultante
nula, conservará , por inércia, sua velocidade constante. Todo o corpo em equilíbrio mantém,
por inércia, sua velocidade constante.
Equilíbrio de
um ponto
material
Fr = 0
r
v constante
Repouso
Equilíbrio estático
ou
MRU
Equilíbrio dinâmico
Referencial Inercial
As noções de repouso, movimento, velocidade, aceleração, força, etc. dependem do
sistema de referência. Referencial Inercial é todo aquele que torna válida a lei da inércia, ou
seja, um sistema de referência que não possui aceleração em relação as estrelas fixas.
Para a maioria dos problemas de Dinâmica, envolvendo movimentos de curta duração
na superfície terrestre, podemos considerar um sistema de referência fixo na superfície da
Terra como inercial, embora sabemos que a Terra não seja um perfeito referencial inercial
devido a seu movimento de rotação.
Quando o movimento em estudo é muito prolongado , devemos considerar inercial
um sistema de referência ligado as estrelas fixas, que são estrelas que aparentam manter fixas
suas posições no céu após muitos séculos de observações astronômicas.
44
4.3 SEGUNDA LEI DE NEWTON OU PRINCÍIPIO FUNDAMENTAL
Quando uma força resultante atua num ponto material, este adquire uma aceleração
na mesma direção e sentido da força, segundo um referencial inercial.
A resultante das forças que agem num ponto material é igual
ao produto de sua massa pela aceleração adquirida.
v
v
F r = m. a
m = massa
a = aceleração
Fr = força resultante
v
v
As grandezas vetoriais F r e a possuem mesma direção e sentido.
Unidades – no SI
m
v
a
v
Fr
em quilograma (kg)
em m/s²
em newton (N)
1kg.1m/s² = 1 N
Peso de um corpo ( P )
É a força de atração gravitacional sofrida por um corpo na vizinhança de um planeta
ou outro grande corpo. O peso de um corpo na Terra é a força de atração que a Terra
exerce sobre o corpo, sendo essa força dirigida para o seu centro.
Devido às diferentes massas dos planetas do sistema solar, o peso de um corpo
será diferente em cada um deles. Quanto maior for a massa de um planeta, maior será a força
gravitacional que o planeta exerce sobre os corpos.
v
Quando um corpo está em movimento sob ação exclusiva de seu peso P , ele
v
adquire uma aceleração denominada aceleração da gravidade g .
45
Pelo princípio fundamental da dinâmica, resulta:
v
v
P = m.g
A aceleração da gravidade (g), em nosso planeta, tem intensidade aproximada de 9,8
m/s². Em outros astros celestes, a aceleração da gravidade tem intensidade diferente, como
por exemplo, na Lua g = 1,6 m/s² e em Júpiter g = 26,5 m/s².
Exemplo: A massa de uma pessoa é de 80 kg Determine o peso da pessoa na Terra, na Lua
e a sua massa na Lua.
Peso na Terra
P = m.g
P = 80 kg.9,8 m/s² = 784 N
Peso na Lua
P = m.g
P = 80 kg.1,6 m/s² = 128 N
Massa na Lua
m = 80 kg
a massa é constante em qualquer planeta.
46
4.4 TERCEIRA LEI DE NEWTON - PRINCÍPIO DA AÇÃO E REAÇÃO
v
Se um corpo A aplicar uma força F A sobre um corpo B, este aplica em A
v
uma força FB de mesma intensidade, mesma direção e sentido oposto.
Exemplo 1
A força que A exerce em B e a correspondente força que B exerce em A constituem o
par ação-reação
Exemplo 2 - Bloco apoiado numa mesa
v
FN
v
P
No exemplo, o bloco é atraído pela Terra, exercendo sobre a mesa uma força de
compressão. Pelo princípio da Ação e Reação a mesa exerce sobre o bloco uma força de
v
reação F N de mesma intensidade, mesma direção, porém de sentido contrário.
47
Exemplo 3
As forças de ação e reação possuem as seguintes características:
•
•
•
São forças trocadas entre dois corpos;
Não se equilibram e não se anulam, pois estão aplicadas em corpos
diferentes.
Tem a mesma direção e sentidos contrários.
EXERCÍCIOS
1) Suponha que um bloco seja puxado com uma força horizontal F = 20 kgf sobre uma
superfície horizontal sem atrito, adquirindo um movimento retilíneo com uma aceleração de
5 m/s2. Qual é a massa do bloco? Considere 1 kgf = 9,8 N
v
2) Um bloco de massa 4 kg desliza sobre um plano horizontal sujeito a ação das forças F1 =
v
50 N e F2 = 26 N, conforme indica a figura. Determine a aceleração do corpo e a reação do
plano de apoio. Considere g = 9,8 m/s2
v
F2
v
F1
48
5 FORÇA DE ATRITO
Considere um corpo apoiado sobre uma superfície horizontal e rígida. Se o corpo
receber a ação de uma força F, devido às rugosidades surge a força de atrito. As forças de
atrito são contrárias ao movimento.
A força de atrito entre os corpos sólidos é devido às asperezas das superfícies em
contato e diminui com o polimento ou com uso de lubrificantes.
r
F
Existem dois tipos de forças de atrito. Força de atrito estática e força de atrito
cinético. Quando a força de atrito impede que o corpo deslize, ou seja, neste caso o corpo
está em repouso, dizemos que o atrito é do tipo estático. Quando a força de atrito atua sobre
corpos que estão deslizando sobre alguma superfície, ou seja em movimento, dizemos que o
atrito é do tipo dinâmico.
49
5.1 FORÇA DE ATRITO ESTÁTICO
r
N
v
F
v
Fae
r
P
Admita um corpo sobre uma superfície, conforme figura acima, sendo solicitada a
v
v
mover-se pela força F . Enquanto o corpo não deslizar, à medida que cresce o valor de F ,
v
cresce também o valor da força de atrito estática, de modo a equilibra a força F , impedindo
v
o movimento. Quando a força F atingir um determinado valor, o corpo fica na iminência de
deslizar, e a força de atrito estática atinge o seu valor máximo. A partir desse instante, com
v
qualquer acréscimo que a força F sofra , o corpo começa a deslizar.
A força de atrito estática é dada por:
Fae = µe.N
N = força normal que o corpo troca com a superfície de apoio.
µe = coeficiente de atrito estático
O coeficiente de atrito µ é um número adimensional e depende do material
dos corpos em contato e do polimento das superfícies
50
5.2 FORÇA DE ATRITO DINÂMICO OU CINÉTICO
r
N
v
v
v
F
v
Fad
r
P
v
Se o corpo está escorregando na superfície de apoio, com velocidade v , conforme
figura, significa que a força de atrito que age nele é dinâmico ou cinético e é dada por:
Fad = µd.N
µd = coeficiente de atrito dinâmico ( depende das duas superfícies que estão em contato).
N = força normal
Observações:
1) Se alguém estiver empurrando um corpo, mas este permanece em repouso, a força de
atrito que age nesta situação será sempre igual a força que a pessoa estiver aplicando no
corpo.
2) A equação da força de atrito estático máximo serve para determinar a força máxima que
a superfície pode aplicar
no corpo para mantê-lo
em repouso. Depois deste valor a
superfície deixa o corpo entrar em movimento.
3) A equação da força de atrito dinâmica só pode ser usada para determinar qual o valor da
força de atrito aplicada pela superfície em corpos que já estão movimentando-se.
4) A força de atrito de rolamento é muito menor que no atrito de deslizamento, aí residindo
a vantagem da invenção da roda.
51
5.3 INFLUÊNCIA DA RESISTÊNCIA DO AR
O meio no qual o corpo está imerso ( ar ou líquido) oferece também uma resistência
ao deslocamento.
Um corpo abandonado do alto de um prédio adquire movimento acelerado por causa
da ação da força peso. Além dessa força, atua no corpo a força de resistência do ar, que tem
mesma direção e sentido contrário ao da força peso.
Essa força de resistência do ar é variável e depende da velocidade do corpo, de sua
forma e da maior secção transversal em relação à direção do movimento.
Exemplos:
•
Um pára-quedas tem forma semi-esférica côncava (área grande) para aumentar a
força
•
de resistência do ar.
Carros, aviões e peixes têm forma aerodinâmica (cortam o ar e água) e área da
secção transversal muito pequena para diminuir a força de resistência do ar ou da
água.
EXERCÍCIOS
1) Um corpo de massa 4 kg está sob a ação de uma força F = 80 N e se desloca na direção
horizontal. O coeficiente de atrito cinético entre o corpo e o apoio é igual a 0,5.
Considerando a aceleração da gravidade local igual a 10 m/s2, determine:
a) A força normal ( reação do apoio)
b) A força de atrito
c) A aceleração adquirida pelo corpo.
v
Fa
v
F
2) Para iniciar o movimento de um corpo de massa 8 kg, apoiado sobre um plano horizontal,
é necessária uma força mínima de 50 N. Para manter o corpo em movimento uniforme é
preciso aplicar ao bloco uma força de 40 N. Determine os coeficientes de atrito estático e
dinâmico entre o corpo e o plano. Adote g = 10 m/s2.
3) Um carro de 800 kg, andando a 108 km/h, freia bruscamente e pára em 5 s.
a) Qual a aceleração do carro?
b) Qual o valor da força de atrito que atua sobre o carro?
52
4) Sistema da figura, os corpos A e B têm massas mA = 3 kg e mB = 6 kg. Os corpos estão
ligados por um fio ideal que passa por uma polia sem atrito, conforme figura.. Entre o
corpo A e o apoio há atrito, cujo coeficiente é 0,5. Considerando-se g = 10 m/s2,
determine a aceleração dos corpos e a força de tração no fio.
A
B
53
6 PLANO INCLINADO
Y
v
N
v
a
v
Fa
v
Px
β α
v
Py
X
v
P
α
Px = P. sen α
ou
Py = P . cos α
P = peso do corpo
N = reação normal de apoio
Fa = Força de atrito
Px > Fa → corpo em movimento
Py = N
Px = P. cos β
54
EXERCÍCIOS
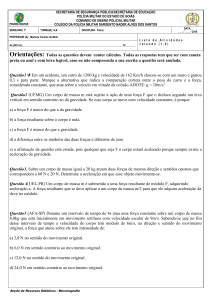
1) Um corpo de massa 20 kg desce um plano horizontal que faz um ângulo de 37º com a
horizontal. O coeficiente de atrito entre as superfícies é 0,4. Considerando g = 10 m/s2 ,
determine:
a) a reação normal de apoio
b) a aceleração do corpo.
m
α
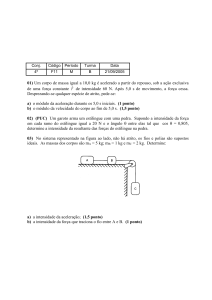
2) Um corpo de massa 5 kg move-se sobre um plano horizontal perfeitamente liso, puxado
v
por uma força F paralela ao plano inclinado, como indica a figura.
v
F
30º
v
Sabendo que g = 10 m/s2 , calcule a intensidade da força F nos seguintes casos:
a) o corpo sobe o plano inclinado com uma aceleração de 2 m/s2
b) o corpo sobe o plano inclinado com velocidade constante.
55
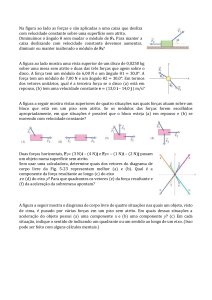
3) No sistema da figura, o coeficiente de atrito estático entre o bloco A e o plano vale 0,3 e o
coeficiente de atrito dinâmico vale 0,2. As massas de A e B são respectivamente iguais a 10
kg e 8 kg e o sistema é abandonado a partir do repouso. O fio e a polia são ideais e g = 10
m/s2.
a) Qual a intensidade da força de atrito entre o bloco A e o plano inclinado?
b) Qual a aceleração do sistema?
A
B
30º
56
7 EQUILÍBRIO DE UM PONTO MATERIAL
Para que um ponto material esteja em equilíbrio é necessário e suficiente que a
resultante de todas as forças que nele agem seja nula.
v
v
Equilíbrio estático - v = 0 - ponto material em repouso em relação
a um referencial
v
v
Equilíbrio dinâmico - v = constante ≠ 0 - o ponto material está em
MRU ( movimento retilíneo e uniforme )
Fr = 0
Fr = 0
Rx = 0 - Σ proj x F = 0 – somatório das projeções em X de todas as
forças é igual a zero
Ry = 0 - Σ proj y F = 0 – somatório das projeções em Y de todas as
forças é igual a zero.
EXERCÍCIOS
1) Calcule a intensidade das trações nos fios ideais 1 e 2 nas situações abaixo.
53°
a)
2
30º
60º
b)
1
2
1
P = 300 N
P = 200 N
57
2 ) Determine as forças de tração nos cabos AB e BC da figura a seguir. Considere os cabos
ideais.
60º
37º
P = 50 N
3) A figura mostra o esquema de sustentação de duas cargas por meio de um cabo de aço. O
cabo está fixo em A e passa por uma pequena roldana em B. O esforço no cabo AC é 500
kgf. Calcular as cargas P e Q. Considere os fios ideais e despreze o atrito.
B
37º
A
C
Q
P
4) Determine a força de tração no fio AC e a compressão na barra AB da estrutura a seguir.
Considere o fio e a barra ideais.
C
30º
⋅
B
A
500 N
58
5) Considere uma esfera homogênea de peso 250 N suspensa por um fio e encostada a uma
parede vertical, como ilustra a figura. A esfera está em equilíbrio. Determine:
a) a força tensora no fio
b) a reação oposta à esfera pela parede.
25º
.
6) Calcule a intensidade da força de tração no fio AB e a compressão na barra. AC da
estrutura abaixo. Despreze o peso do fio e da barra.
B
40º
A
60º
C
P = 200 N
59
8 MOMENTO DE UMA FORÇA OU TORQUE
8.1 CONCEITO
O momento de uma força é a capacidade dessa força em fazer girar um objeto.
Consideremos uma força de intensidade F, aplicada num ponto A de uma barra que pode
girar livremente em torno do ponto O ( pólo), conforme figura:
r
F
O
d
r
A intensidade do momento da F em relação ao ponto O (pólo) é dado por:
MTO O F = F. d
r
O momento da força F , em relação a um ponto O fixo, é o produto da intensidade da
r
força F pela distância d do ponto à reta suporte da força.
Ponto “O” – pólo do momento
F = força
d = braço da força – distância da reta suporte da força ( linha de ação da força) ao eixo de
rotação. Perpendicular traçada da linha de ação da força ao ponto (pólo).
MTO O F = Momento da força F em relação ao ponto O.
No caso de uma força que não seja perpendicular ao segmento de reta que une o
ponto de aplicação da força ao pólo, podemos calcular o momento dessa forças de duas
maneiras: decompondo a força ou calculando a medida do braço da força.
60
Unidades no SI :
F - em N (Newton)
d - em m ( metro )
MTO - N.m
Outras unidades do momento
N.cm, N.mm, kgf.m, kgf.cm, kgf.mm
8.2 CONVENÇÃO DE SINAIS DO MOMENTO
• Rotação sentido horário – MTO +
• Rotação sentido anti-horário – MTO -
EXERCÍCIOS
1) Calcular o momento de cada uma das forças, em relação ao ponto O, da barra em figura.
r
F 1 = 80 N
r
F2 = 50 N
O
r
F 3 = 100 N
0,3 m
0,2 m
61
2) Determinar o momento resultante, em relação ao ponto C, da barra em figura.
r
F2 = 60 N
A
B
r
F1
=
r
F 4 = 70 N
C
D
E
r
F 3 = 80 N
50 N
1m
1m
1m
r
F 6 = 90 N
r
F 5 = 100 N
1m
3) Determine o momento resultante, em relação ao ponto O, da figura abaixo.
r
F1
r
F2 = 70 N
=
50 N
O
30 cm
r
F3
r
F
=
40N
r
F3
4
=
=
40 N
60 N
40 cm
r
4) Determine o momento da força F em relação ao ponto A.
20 cm
A•
B
37º
r
F = 100 N
62
8.3 BINÁRIO
Denomina-se binário o sistema constituído por duas forças de mesma intensidade,
mesma direção, sentidos opostos e aplicadas em pontos distintos.
r
F
A
B
sentido de rotação
r
F
b
OBS:
Um binário tende a produzir apenas uma rotação no corpo em que é aplicado e só pode
ser equilibrado por outro binário, pois uma outra força que atuasse no corpo provocaria
uma resultante R ≠ 0;
Mto binário = F.b
A resultante de um binário é nula.
O momento do binário é dado por:
b = braço do binário
F = intensidade da força
EXERCÍCIOS
Determine o momento dos binários das barras representadas abaixo.
r
F = 50 N
1)
r
F = 50 N
0,3 m
63
2)
r
F = 70 N
30º
A
20 cm
B
30º
r
F = 70 N
EXERCÍC IOS COMPLEMENTARES
1) Calcule a intensidade das trações nos fios ideais 1 e 2 nas situações abaixo.
40º
60°
a)
50º
b)
2
1
2
1
P = 400 N
P = 500 N
2) A figura mostra o esquema de sustentação de três cargas por meio de cabos. Determine
os pesos N e P, sabendo-se que o peso Q é igual a 600 kgf. Considere os fios ideais.
30º
Q
N
N
P
64
3) Calcular a força de tração no fio e a compressão na barra da estrutura. Despreze o peso
da barra e do fio.
45º
P = 900 N
4) Determine o momento resultante,em relação ao ponto C, das forças representadas a
seguir.
Dados:
F1 = 10 N ,
F2 = 50 N ,
F3 = 60 N ,
r
F2
r
F3
F4 = 100 N ,
F5 = 50 N,
F6 = 20 N
r
F4
r
F5
A
B
C
D
E
r
F6
r
F1
2m
3 m
2 m
2m
5) Determine o momento da força F em relação ao ponto B.
.
B
0,3 m
A
60°
r
F = 80 N
65
9 VÍNCULOS
É todo elemento de ligação entre as partes componentes de uma estrutura ou entre a
estrutura e o solo. Toda a condição geométrica que limite a mobilidade de um corpo chamase vínculo. Os vínculos devem impedir que a estrutura perca sua forma e que se movimente,
todavia permitem as deformações elásticas das peças da estrutura.
9.1 CLASSIFICAÇÃO DOS VÍNCULOS
Os vínculos são classificados segundo os movimentos que impedem. Examinaremos
aqui os vínculos no caso plano, lembrando que uma barra possui no plano três graus de
liberdade: duas translações e uma rotação.
Vínculo de 1ª Classe : são os que impedem um único movimento da estrutura
Representação:
Exemplo - Apoio simples
r
F
66
Vínculo de 2ª Classe: São os que impedem dois movimentos da estrutura
Representação:
Exemplo
Movimento do carrinho somente no eixo X
Vínculo de 3ª Classe: São os que impedem os três movimentos da estrutura.
Representação:
Exemplo - Engaste
9.2 EFICÁCIA VINCULAR
Para que a vinculação seja eficaz é necessário que a quantidade de vínculos seja
suficiente para impedir os movimentos da estrutura e ainda que esses vínculos estejam
corretamente distribuídos.
67
-
Vinculação eficaz
r
F2
r
F1
-
Vinculação ineficaz
r
F2
r
F1
9.3 CLASSIFICAÇÃO ESTRUTURAL
Conforme o número de vínculos a estrutura pode ser:
1º) Estrutura Hipoestática
O número de vínculos é insuficiente para impedir os movimentos da estrutura.
r
F2
r
F1
68
2º) Estrutura Isostática
O número de vínculos é suficiente para impedir os movimentos da estrutura.
r
F2
r
F1
3º) Estrutura Hiperestática
O número de vínculos é mais do que suficiente para impedir os movimentos da
estrutura.
r
F2
69
10 EQUILÍBRIO DE UM CORPO EXTENSO
10.1 CONDIÇÕES DE EQUILÍBRIO
Para que um corpo esteja em equilíbrio é necessário e suficiente que a resultante de
todas as forças que nele agem seja nula e que o somatório dos momentos de todas as forças,
em relação a um ponto qualquer da estrutura, seja nula.
Rx = 0 - Σ proj x F = 0 – somatório das projeções em X de todas as
forças é igual a zero
Ry = 0 - Σ proj y F = 0 – somatório das projeções em Y de todas as
forças é igual a zero.
Fr = 0
Essa condição implica que o corpo não terá movimento de translação.
Σ MTO
A
F=0
O somatório dos momentos de todas as forças, em relação a um
ponto A qualquer da estrutura, é nula.
Essa condição implica que o corpo não terá movimento de rotação.
10.2 CÁLCULO DE REAÇÕES EM ESTRUTURAS ISOSTÁTICA
POR APLICAÇÃO DAS EQUAÇÕES DE EQUILÍBRIO DA MECÂNICA.
Para o cálculo de reações, em estruturas isostática, utilizam-se as equações de
equilíbrio da mecânica vistas acima.
70
EXERCÍCIOS
Determinar as reações nos apoios A e B das estruturas representadas abaixo.
200 N
1)
500 N
A
B
1m
3m
300 N
1m
200 N
500 N
2)
A
B
1m
1,5 m
1,5 m
100 N
1m
3)
500 N
1 000 N
A
B
1m
2m
37°
1m
500 kgf/m
800 kgf
4)
A
B
2m
2m
4m
2m
71
5) O sistema da figura está em equilíbrio estático. O ponto A representa uma articulação em
torno da qual a barra AB de comprimento 3 m e peso 2 000 N pode girar. Determine:
a) A intensidade da tração no cabo, considerando-o ideal.
b) A intensidade das forças componentes (horizontal e vertical) na articulação A.
30°
A
C
B
F = 4 000 N
2 m
1 m
6) Determinar a força de tração no cabo 1 e as forças de reações horizontal e vertical no
apoio A da estrutura abaixo.
1
5 kN/m
10 kN
53º
A
B
4m
3m
3m
72
7) O guindaste da figura foi projetado para 5 kN. Determinar a força atuante na haste do
cilindro e reação horizontal e vertical na articulação A.
EXERCÍCIOS COMPLEMENTARES
1) Determine as reações nos apoios A e B das estruturas representadas a seguir.
a)
10 kN
200 mm
15 kN
350 mm
350 mm
73
600 N
300 N
200 Nm
b)
37º
1,5 m
c)
8000 N/m
0,5 m
500 N
1,5 m
0,4 m
2500 N
0,1 0,2
d)
4 kN/m
3,0 m
5 kN
1,5 m
1,5m
e)
4 kN/m
3m
6 kN/m
3m
74
REFERÊNCIAS
BONJORNO, José R. et al. Física fundamental: volume único. São Paulo: FTD, 1992.
HIBBELER, Russel Charles. Mecânica estática. Rio de Janeiro: Livros Técnicos e
Científicos Editora, [199?].
MELCONIAN, Sarkis. Mecânica técnica e resistência dos materiais. 14. ed. São Paulo:
Érica, 2004.
NICOLAU,Gilberto; PENTEADO, Paulo; TORRES, Carlos. Física: ciências e tecnologia.
São Paulo: Moderna, 2006.