UMA SESSÃO DE OBSERVAÇÃO E DE OBTENÇÃO DE
IMAGENS CCD DO CÉU PROFUNDO
Pedro Ré
De um modo geral podemos resumir em somente dois pontos as enormes vantagens
que as câmaras CCD têm relativamente às emulsões fotográficas: 1) conseguem
registar até 90% dos fotões incidentes (elevada eficiência quântica) contrariamente
às emulsões fotográficas que apenas registam 2 a 5%; 2) não apresentam uma falha
de reciprocidade, isto é, o seu sinal de saída, “output”, é quase directamente
proporcional aos fotões incidentes (linearidade quase perfeita). Isto significa que se
podem obter imagens de objectos do céu profundo em poucos minutos ao contrário
do que sucede se utilizarmos emulsões fotográficas, que requerem dezenas de
minutos ou mesmo horas.
O modo como um sensor CCD transforma uma imagem num ficheiro de computador
é relativamente simples. A luz que incide num conjunto de centenas de milhares de
detectores (“pixels” ou elementos de imagem), produz cargas eléctricas, que são por
sua vez lidas, medidas, convertidas em números e gravadas num ficheiro de
computador. As câmaras deste tipo, necessitam de um computador (PC ou Mac) para
poderem ser operadas.
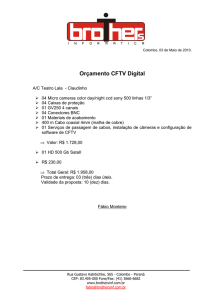
Figura 1- Câmaras CCD versus emulsões fotográficas.
A eficiência quântica de um sensor CCD descreve a resposta deste a diferentes
comprimentos de onda do espectro electromagnético. Os sensores standard
(iluminação frontal) são mais sensíveis ao verde, vermelho e infravermelho
(comprimentos de onda entre 500 e 800nm) relativamente aos comprimentos de
onda na região do azul (400-500nm). Um outro tipo de sensores CCD
(retroiluminados) possui uma eficiência quântica muito superior, que pode por vezes
atingir os 90%.
Figura 2- Eficiência quântica de alguns sensores CCD.
Devido à sua grande sensibilidade à luz, os elementos (pixels) dos sensores CCD
apresentam um sinal de saída elevado perante luminosidades relativamente baixas.
Alguns sensores CCD têm a como opção um sistema “antiblooming” concebido para
eliminar o excesso de carga dos elementos de imagem saturados. Nos sensores em
que este não esteja presente, as estrelas brilhantes produzem uma risca vertical que
é característica da saturação. Os sensores que integrem um sistema "anti-blooming"
são cerca de 30% menos sensíveis.
A maioria dos CCD têm a possibilidade de agrupar electronicamente os elementos de
imagem ou pixels formando-se deste modo um "super pixel". Este "super pixel"
integra a área de todos os elementos de imagem que contribuem para a carga
eléctrica. A esta característica chama-se “binning”. Um “binning” de 1x1 significa que
não são agrupados individualmente quaisquer elementos de imagem. Um “binning”
de 2x2 equivale à soma da informação proveniente de uma área com 4 elementos de
imagem adjacentes. Neste último caso a sensibilidade é aumentada cerca de 4 vezes
mas a resolução da imagem é diminuída para cerca de metade.
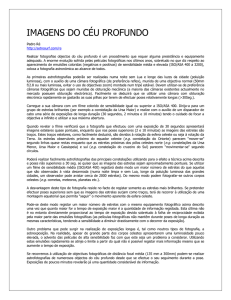
Figura 3- estrelas saturadas (sensor CCD s/ "antiblooming").
M7 Takahashi FS102 + ST-7.
Figura 4- Exemplos de diversos tipos de “binning”.
A digitalização, ou seja a conversão analógica/digital, contitui o processo de tradução
da carga proveniente do sensor CCD num formato binário que é posteriormente
reconhecido pelo computador. Uma câmara com 12 bits tem um “output” de 212 o
que equivale a 4096 níveis de cinzento, enquanto que um câmara com 16 bits possui
um output de 65536 níveis de cinzento (216).
Interferência térmica
Durante o tempo de integração, é acumulada uma interferência térmica em cada
pixel. O sensor CCD necessita de ser refrigerado a uma temperatura muito baixa (da
ordem dos -173ºC = 100K) para que este sinal seja reduzido a um nível
negligenciável. A maioria das câmaras CCD são afectadas por esta interferência uma
vez que habitualmente não são refrigeradas a temperaturas inferiores a -50ºC. A
imagem é deste modo afectada por uma corrente escura ou "dark current" (cujo
nome é derivado do facto desta interferência estar presente mesmo quando o sensor
se encontre no escuro) e o ruído produzido tem duas origens principais: ruído de
leitura e ruído espacial. O primeiro está relacionado com flutuações registadas
durante o processo de leitura, e o único modo de o ultrapassar consiste em efectuar
uma média de diversas imagens do mesmo objecto. O segundo deriva do facto de
cada pixel reagir de modo distinto à corrente negra, produzindo-se um aspecto
granulado na imagem não tratada. É possível produzir uma mapa de referência da
corrente negra (usualmente uma média de 7 a 10 imagens obtidas em total
obscuridade) uma vez que esta apresenta sempre um padrão recorrente e
característico para cada detector.
Offset
Adicionalmente existe ainda um "offset" ou "bias" que é independente do tempo de
integração e da temperatura do sensor. Este "offset" é induzido pelas características
do “output” do sensor CCD e dos circuitos electrónicos do processador do sinal de
video. Um mapa de "offset" pode ser facilmente fabricado recorrendo a um média de
algumas imagens obtidas com um tempo de integração mínimo em total escuridão.
Não uniformidade da sensibilidade à luz
A sensibilidade à luz não é idêntica para todos os elementos que constituem um
sensor CCD. Se este for iluminado por uma fonte luminosa uniforme (por exemplo o
céu crepuscular) o resultado não é necessariamente uma imagem uniforme. Pode
deste modo produzir-se um outro tipo de mapa que habitualmente é designado por
"flat field" ou mapa de iluminação uniforme. Este tipo de mapa é também utilizado
na correcção de diversos defeitos que se produzem no plano focal de um telescópio:
menor iluminação nos cantos da imagem (problema geralmente conhecido como
vignetting), sujidade, etc.
Técnicas de obtenção de imagens CCD
O pré-processamento de uma imagem obtida com um sensor CCD envolve uma série
de procedimentos no computador utilizando software apropriado, nos quais se inclui
a subtracção do mapa de corrente escura e mapa de "offset", assim como a divisão
pelo mapa de iluminação uniforme ("flat field"). O resultado é uma imagem préprocessada ou calibrada. A soma ou soma média de diversas imagens préprocessadas produz sempre melhores resultados.
Habitualmente utilizo diversos telescópios nas minhas sessões de observação e de
obtenção de imagens CCD do céu profundo: Celestron 14, Takahashi FS102. Utilizo
igualmente diversas câmaras CCD (Hi-sis 22, ST-7, Mx916 e Audine). Estes dois
telescópios estão montados sobre a mesma montagem equatorial de garfo,
motorizada nos dois eixos (ascensão recta e declinação) e provida de círculos
graduados digitais. A referida montagem está equipada com uma roda dentada Byers
(230mm de diâmetro e 359 dentes) de elevada precisão (erro periódico inferior a
2"). Três das câmaras CCD estão equipadas com o mesmo tipo de sensor CCD (KAF0400) que é constituído por 768x512 elementos de imagem (Hi-sis 22, ST-7 e
Audine).
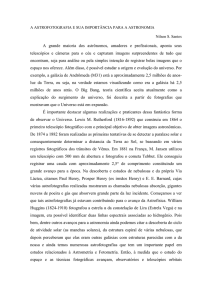
Figura 5- Pré-processamento de imagens CCD do céu profundo.
Figura 6- Equipamento utilizado: C14, FS102, Hi-sis 22, ST-7, Mx916 e Audine.
As sessões destinadas à obtenção de imagens CCD do céu profundo são geralmente
iniciadas com a elaboração prévia de diversas imagens (integrações) que serão
utilizadas na construção do mapa de "flat field". A correcção das irregularidades
verificadas no campo de visão do telescópio, recorrendo ao referido mapa de
iluminação uniforme (divisão), juntamente com a remoção (subtracção) do "offset" e
"dark current", são elos essenciais no pré-processamento das imagens CCD do céu
profundo.
Os mapas de "flat field" são geralmente obtidos durante os períodos crepusculares
logo a seguir ao pôr do sol. Durante um intervalo de tempo não muito extenso
(aprox. 30 min.) o telescópio é apontado para o zénite e fazem-se várias integrações
com 5 a 20 s em diferentes regiões desprovidas de estrelas brilhantes. É necessário
obter uma relação sinal/ruído elevada, em cada uma das integrações, (equivalente a
cerca de metade da dinâmica do CCD). A média das imagens assim obtidas (em que
todas as estrelas desaparecem) constitui o mapa de "flat field". Este mapa contém o
"vignetting" do sistema óptico, a sujidade dos filtros, dos redutores de focal e da
janela óptica do CCD, bem como a variação da eficiência quântica dos diferentes
elementos de imagem. Torna-se necessário que o sensor CCD esteja próximo do
plano focal do telescópio e que a sua orientação não varie durante a sessão de
obtenção de imagens. Em alternativa pode construir-se o mapa de “flat-flied” a partir
de imagens de um ecran braco iluminado uniformemente.
Tal como numa sessão de obtenção de imagens recorrendo a emulsões fotográficas,
o sensor CCD tem de ser colocado rigorosamente no plano focal do telescópio. Uma
boa focagem é avaliada tomando como referência a imagem de uma estrela não
muito brilhante (para não saturar o sensor). Por vezes é utilizado um ecrã com dois
ou mais orifícios, que é colocado à frente do telescópio. Por tentativa e erro obtemse uma focagem precisa quando em vez de duas ou mais imagens de uma mesma
estrela se regista um único disco estelar. A focagem pode igualmente ser efectuada
recorrendo a algumas funções específicas do software que controla a câmara CCD.
Em qualquer dos casos é essencial uma focagem precisa. Só se podem obter boas
imagens CCD quando o objecto a registar se encontre rigorosamente focado. Em
instrumentos com relações f superiores ou igual a 6) é necessário por vezes efectuar
diversas sessões de focagem durante uma sessão de observação.
Usualmente realizam-se cerca de 3 a 5 integrações de cada objecto do céu profundo.
O tempo de integração pode ser distinto se se tratar de um objecto difuso (galáxia,
nebulosa) ou de um enxame estelar. No primeiro caso realizam-se usualmente
integrações de 2 ou 3 min e no segundo caso integrações de 1min. As diversas
imagens assim obtidas após terem sido pré-processadas (subtracção da "dark
current" e "offset" e divisão pelo "flat field") terão de ser pós-processadas. Este pósprocessamento consiste habitualmente em dois procedimentos (soma e soma
mediana). São deste modo construídas duas imagens com informações distintas.
Figura 7- Exemplos de ecrans de focagem.
Figura 8- Focagem assistida por software (MaximDL/CCD).
Recorrendo à utilização do telescópio Celestron 14 munido de um redutor de focal
f/6 ("Giant Easy-Guider" da Lumicon) podem facilmente registar-se estrelas de
magnitude 20 em cerca de 5 min de integração. Do mesmo modo, e utilizando
tempos de integração idênticos é possivel registar estrelas de mag 17/18 com o
refractor Takahashi FS102 (f/8). Os diversos objectos a integrar são localizados
utilizando além do "flip-mirror-finder", um sistema de círculos graduados digitais
("Lumicon Ngc Sky Vector"). Recorrendo a este último dispositivo é possível localizar
mais de 12000 objectos distintos de um modo rápido, simples e interactivo.
O pós-processamento das imagens é realizado recorrendo sobretudo a diversos
programas, nomeadamente o programa MaximDL. Este programa possui um
conjunto impressionante de rotinas de processamento, desde as mais simples
(rotinas de pré-processamento) até às mais sofisticadas (restauração de imagem).
Além da soma e soma média de imagens pré-processadas, pode-se igualmente
recorrer à utilização de outro tipo de rotinas. Na maioria dos casos utilizam-se
funções do tipo "unsharp mask" para melhorar o contraste e "logarithmic scaling"
para tornar visiveis certas estruturas (braços de galáxias espirais, estruturas em
nebulosas planetárias e nebulosas de emissão, etc).
Figura 9- Flip-mirror-finder, Plossl 25mm illuminated reticle CCD framing eyepiece e
digital counter.
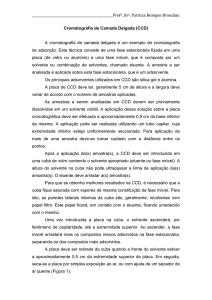
Figura 10- M51 Takahashi FS102 F/8 + ST-7 (40 Min de integração).
Figura 11- Imagens do Céu profundo, Takahashi FS102 F/8 + ST-7 (6 a 10 Min de
integração).
Mais informações em: http://www.astrosurf.com/re