Detecção de Falhas em Conjuntos Motor-Bomba Acionados por
Inversores de Freqüência através da Análise de Vibração
e Redes Neurais Artificiais
Jorge Nei Brito (1)
Vinícius Augusto Diniz Silva (2)
Michel Philipe Trindade Silva (3)
Lane Maria Rabelo Baccarini (4)
José Antônio da Silva (5)
José Edmar Rios (6)
RESUMO
Neste trabalho, apresenta-se uma contribuição ao estudo e caracterização de
falhas em conjuntos motor-bomba acionados por inversores de freqüência
usando Redes Neurais Artificiais (RNAs) treinadas a partir de sinais de
vibração obtidos experimentalmente. A metodologia desenvolvida é usada para
classificar a excitação devido a desbalanceamento, desalinhamento e folga
mecânica, cavitação, além da condição normal de funcionamento. Através de
um filtro seletivo é possível reduzir o número de parâmetros capazes de
representar os sinais utilizados para o treinamento das redes neurais artificiais.
1. INTRODUÇÃO
A utilização de inversores de freqüência operando com modo de controle
escalar e vetorial no acionamento de conjuntos motor-bomba é cada vez mais
difundida. Nas apresentações de trabalhos de grupos de pesquisa em
congressos técnico-científicos, profissionais da manutenção e pesquisadores
têm motivado a ampliação dos estudos de detecção de falhas destes conjuntos
incluindo os inversores de freqüência. Há um grande interesse no
conhecimento do comportamento dos inversores de freqüência (suas
(1) Sócio da ABRAMAN, Eng. Mecânico pela PUC-MG, Mestre em Eng.
Mecânica pela UFU, Doutor em Eng. Mecânica pela UNICAMP, Professor
da UFSJ - Universidade Federal de São João Del Rei - [email protected].
(2) Graduando em Eng. Mecânica pela UFSJ - Universidade Federal de São
João Del Rei - [email protected]
(3) Graduando em Eng. Mecânica pela UFSJ - Universidade Federal de São
João Del Rei - [email protected]
(4) Eng. Eletricista FUNREI, Mestre em Eng. Elétrica pela UNIFEI, Doutora Eng.
Elétrica pela UFMG, Professora da UFSJ - Universidade Federal de São
João Del Rei - [email protected].
(5) Eng. Mecânico FUNREI, Mestre em Eng. Mecânica pela UFMG, Doutor Eng.
Térmica pela USP-EESC, Professor da UFSJ - Universidade Federal de
São João Del Rei - [email protected].
(6) Eng. Mecânico FUNREI, Mestre em Eng. Mecânica pela UNIFEI, Professor
da UFSJ - Universidade Federal de São João Del Rei - [email protected].
freqüências determinísticas, modulações, harmônicos, dentre outros) com
objetivo de incluí-los num programa de manutenção preditiva.
O acionamento de motores elétricos de indução por inversores de freqüência é
uma solução relativamente nova, porém, já amplamente utilizada na indústria.
Assim sendo, muito ainda há por ser feito/estudado/compreendido em tais
aplicações.
A aplicação de técnicas de Inteligência Artificial na detecção de falhas
possibilita a realização do diagnóstico on line por um sistema, podendo
apresentar uma interação mínima com o usuário e, em muitos casos, sendo
capazes de diagnosticar falhas sem a ajuda dos especialistas da manutenção,
Brito (2002).
Na sua forma mais geral, uma rede neural é uma máquina projetada para
mimetizar a maneira como o cérebro realiza uma tarefa particular ou função de
interesse. A rede é, normalmente, implementada utilizando-se componentes
eletrônicos, ou é simulada por programação em um computador.
Neste trabalho, apresenta-se uma contribuição ao estudo e caracterização de
falhas em conjuntos motor-bomba alimentados por inversores de freqüência
usando Redes Neurais Artificiais (RNAs) treinadas a partir de sinais de
vibração obtidos experimentalmente. Para treinamento e qualificação das
RNAs usou-se o Neural Network Toolbox, ferramenta do MATLAB. Os sinais de
vibração foram coletados através do MICROLOG GX, tecnologia SKF. Através
de um Filtro Seletivo foi possível reduzir o número de parâmetros capazes de
representar os sinais utilizados para treinamento das RNAs. Através da
metodologia desenvolvida é possível classificar a excitação devido a
desbalanceamento, desalinhamento, folga mecânica e cavitação, além da
condição normal de funcionamento.
Constituindo, assim, uma ferramenta complementar às atuais técnicas de
Manutenção Preditiva, possibilitando intervenções planejadas no equipamento
monitorado, aumentando a disponibilidade e a confiabilidade da operação das
bombas centrífugas presentes nas plantas industriais e aperfeiçoando as
condições de projeto de turbobombas.
2. BANCADA EXPERIMENTAL
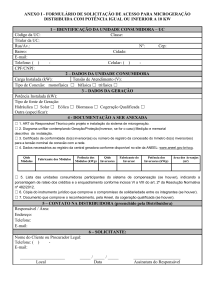
A partir da bancada experimental (Figura 1) montada no Laboratório de
Máquinas Hidráulicas (LABMH) da Universidade Federal de São João del-Rei,
estudou-se as seguintes falhas: desbalanceamento, desalinhamento, folga
mecânica e cavitação.
Na bancada da figura 1, os defeitos foram introduzidos em uma bomba
centrífuga KSB ETA [1], com diâmetro nominal do flange de recalque de 150
mm utilizando um rotor aberto de diâmetro nominal de 200 mm operando com
vazão de 32 m³/h e altura manométrica de 8 m, montada em conjunto a um
motor de indução trifásico WEG [2], 10 CV, 1760 RPM, 220 V, acionado por um
inversor de freqüência WEG CFW 05 [3], 10 CV, 220 V, 25 A, 60 Hz. Elevando
água à temperatura ambiente de um reservatório de sucção de 10 m³ a um
reservatório de recalque de 2 m³.
Utilizou-se o coletor/analisador SKF Microlog GX [4] e o acelerômetro SKF
CMSS2200 [5], para a coleta dos espectros.
Os sinais foram obtidos no plano radial (posição vertical e horizontal) e axial na
bomba e no motor pelo lado do acoplamento. Utilizou-se a janela tipo Hanning
com resolução de 1600 linhas e 4 médias, variando a faixa de freqüência entre
0 e 4000 Hz, de modo a analisar toda a faixa de freqüência na qual os defeitos
supracitados são identificados.
3
5
2
1
4
Figura 1. Bancada Testes - LABMH.
Anteriormente aos testes, a bancada foi balanceada dinamicamente e alinhada
a laser objetivando eliminar as fontes de vibração indesejáveis. E dessa forma
pode-se determinar a condição normal de funcionamento do conjunto motorbomba (assinatura da bancada), a qual se estipulou como 0,5 mm/s de
amplitude de vibração nos planos radial e axial.
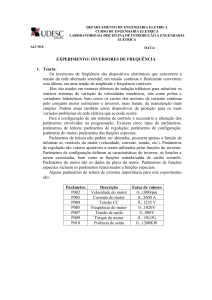
Juntamente com uma segunda bancada (Figura 2) montada no Laboratório de
Sistemas Dinâmicos - LASID, usada para estudar também as influências do
inversor de freqüência o motor.
Para aquisição dos sinais usou-se o equipamento SKF Microlog GX [1],
gentilmente cedido pela SKF do Brasil. Este equipamento é um coletor e
analisador de sinais que digitaliza as informações nele contidas.
Essas informações podem ser analisadas diretamente no próprio equipamento
ou então transferidas para o computador através do software de apoio SKF
@ptitude Analyst Human Interface Machine. Nesta opção tem-se um ambiente
mais confortável de trabalho, permitindo análises detalhadas, geração de
relatórios e montagem de banco de dados.
Os sinais de vibração foram obtidos utilizando-se um acelerômetro SKF
CMSS2200 [2], com sensibilidade de 100 mV. Usou-se uma janela Hanning
com 3200 linhas e 8 médias, para uma faixa de freqüência de 0 a 500 Hz. As
amplitudes foram medidas em velocidade (mm/s).
Os sinais foram aquisitados com o acelerômetro colocado alternadamente nas
posições vertical, horizontal e axial, tanto do lado do acoplamento flexível [3]
quanto do lado de trás do motor.
Os defeitos foram inseridos motor de indução trifásico [4], Eberle, 1/3 CV, 860
rpm, 220 V, 60 Hz, 8 pólos, categoria N, rolamentos SKF 6204 zz, classe de
isolamento B, FS 1,15, Ip/In 3,5, IP 55, 1,68 A.
Trabalhando como gerador estava um motor de corrente continua [5], Kuper,
0,45 KW, 1500 rpm, 220V, 60 Hz, classe F, rolamentos SKF 6203, IP 23, 0,45
A, alimentado com um banco de resistências [6], utilizado como sistema de
cargas e para variação da carga um varivolt [7] de 110 V.
Para a alimentação do conjunto utilizou-se o inversor tipo PWM, WEG CFW 09
[8], que foi configurado com uma freqüência de chaveamento de 1,25 KHz.
Antes dos teste foi feito o balanceamento dinâmico e alinhamento a laser,
verificando-se também possíveis folgas mecânicas (base frouxa do motor).
Com isso pode-se obter os espectros de vibração para a condição considerada
sem defeito (amplitude até 0,200 mm/s na freqüência de rotação).
5
2
4
3
7
6
8
1
Figura 2. Bancada de Teste - LASID.
3. FALHAS MECÂNICAS
O motor de indução submetido a uma tensão PWM, proveniente de um inversor
de freqüência, estará sujeito a tensões harmônicas (componentes de
freqüência acima da freqüência fundamental). Dependendo da modulação
PWM empregada, da freqüência de chaveamento e de outras particularidades
do controle, o motor poderá apresentar aumento de perdas e temperatura,
perda de rendimento e aumento dos níveis de vibração e ruído, quando
comparado com alimentação senoidal.
Na equação 1 temos que o harmônico de corrente de ordem “n” (In) é igual ao
número de pulsos do conversor (n) vezes um número inteiro consecutivo (k)
(ex.: 1,2,3...), mais ou menos 1.
In = (n × k ) ± 1
(1)
A presença desses harmônicos produzem alterações no acionamento, como
componentes de torque que atuam no sentido oposto ao da fundamental, como
ocorre com o 5°, 7°, 11°, etc. harmônicos. Isto significa que tanto a 5ª quanto a
7ª, produzem uma resultante de 6ª harmônica que podem estimular oscilações
mecânicas em sistemas motor-bomba, motor-carga ou turbina-gerador, devido
a uma potencial excitação de ressonâncias mecânicas, IEEE (1991).
A análise de vibração é usada para identificar falha de origem mecânica. Para
o caso de desbalanceamento, desalinhamento e folga mecânica, as
freqüências determinísticas são (1xfr, 2xfr, 3xfr), onde fr representa a
freqüência de rotação do motor, Brito et al. (1999) Brito et al. (2001).
Dessa forma inicialmente introduzimos esses defeitos isoladamente na
bancada e posteriormente fizemos combinações dos mesmos, de forma a
compor o banco de dados com situações comuns na indústria.
De acordo com os testes realizados no LASID na bancada 2 (figura 2),
obtivemos as influências do inversor de freqüência para as falhas mecânicas e
a condição normal de funcionamento.
3.1. Condição normal de funcionamento
Nas figuras 3.a e 3.b têm-se os espectros de vibração para a condição normal
de funcionamento do motor elétrico.
Figura 3.a. sem inversor.
Figura 3.b. inversor WEG.
Através da comparação dos espectros podemos concluir que ouve um aumento
de 3,71 % no nível global de vibração (Band Overall) para este estado sem
falha, pois tínhamos um nível global de 0,8639 mm/s, quando o motor era
ligado diretamente à rede, que passou para 0,8972 mm/s quando o motor foi
acionado pelo inversor de freqüência.
3.2. Desbalanceamento
Nas figuras 4.a e 4.b têm-se os espectros de vibração para o motor elétrico
desbalanceado por uma massa de 10 gramas, que foi periodicamente
alternada de posição.
Em todas as falhas a seguir utilizamos um intervalo de freqüência de 0 a 65 Hz,
para que desta forma conseguíssemos isolar apenas a vibração das falhas em
questão.
Figura 4.a. sem inversor.
Figura 4.b. inversor WEG.
Através da comparação dos espectros podemos concluir que ouve um aumento
de 9,43 % no nível global de vibração (Band Overall) para o caso de um motor
desbalanceado, pois tínhamos um nível global de 2,748 mm/s, quando o motor
era ligado diretamente à rede, que passou para 3,034 mm/s quando o motor foi
acionado pelo inversor de freqüência.
3.3. Folga mecânica
Nas figuras 5.a e 5.b têm-se os espectros de vibração para o motor elétrico
com folga mecânica (pé manco).
Figura 5.a. sem inversor.
Figura 5.b. inversor WEG.
Através da comparação dos espectros podemos concluir que ouve um aumento
de 59,37 % no nível global de vibração (Band Overall) para o caso de um motor
com folga mecânica, pois tínhamos um nível global de 0,7333 mm/s, quando o
motor era ligado diretamente à rede, que passou para 1,805 mm/s quando o
motor foi acionado pelo inversor de freqüência.
3.4. Desalinhamento
Nas figuras 6.a e 6.b têm-se os espectros de vibração para o motor elétrico
desalinhado.
Figura 6.a. sem inversor.
Figura 6.b. inversor WEG.
Através da comparação dos espectros podemos concluir que ouve um aumento
de 9,13 % no nível global de vibração (Band Overall) para o caso de um motor
desalinhado, pois tínhamos um nível global de 1,284 mm/s, quando o motor era
ligado diretamente à rede, que passou para 1,413 mm/s quando o motor foi
acionado pelo inversor de freqüência.
3.5. Combinação das falhas
Nas figuras 7.a e 7.b têm-se os espectros de vibração para o motor elétrico
desbalanceado, desalinhado e com folga mecânica, nas mesmas proporções
com que foram inseridas individualmente.
Figura 7.a. sem inversor.
Figura 7.b. inversor WEG.
Através da comparação dos espectros podemos concluir que ouve um aumento
de 8,13 % no nível global de vibração (Band Overall) para o caso da
combinação das três falhas, pois tínhamos um nível global de 1,852 mm/s,
quando o motor era ligado diretamente à rede, que passou para 2,016 mm/s
quando o motor foi acionado pelo inversor de freqüência.
3.6. Cavitação
Na Figura 8 temos o espectro de vibração para a bomba da figura 1 cavitando.
Com uma redução da vazão na linha de sucção da bomba (estrangulamento)
ou permitindo a entrada de ar através de uma válvula inserida na tubulação
anterior ao bocal de sucção, introduziu-se uma excitação devido à cavitação na
bancada experimental. Um espectro de vibração característico de cavitação é
mostrado na Figura 8.
Para o caso específico da Cavitação, ainda não concluiu-se a real influência do
inversor de freqüência, sendo necessário fazer mais testes experimentais, para
que possamos chegar à uma conclusão.
Figura 8. Espectro característico de falha por cavitação.
4. REDES NEURAIS ARTIFICIAIS
O cérebro é um “computador” (sistema de processamento de informação)
altamente complexo, não-linear e paralelo. Ele tem a capacidade de organizar
seus constituintes estruturais, conhecidos por neurônios, de forma a realizar
certos processamentos muito mais rapidamente que o mais rápido computador
existente.
Um neurônio em desenvolvimento é sinônimo de um cérebro flexível. A
flexibilidade permite que o sistema nervoso em desenvolvimento se adapte ao
seu meio ambiente. Assim como a flexibilidade parece ser essencial para o
funcionamento dos neurônios como unidades de processamento de informação
do cérebro humano, também ela o é com relação às redes neurais construídas
com neurônios artificiais, Haykin (2001).
Uma RNA é uma estrutura de processamento paralelo de informação
consistente em elementos de processamento (neurônios) interconectados por
canais de comunicação unidirecionais. Cada neurônio tem uma única saída
como resultado do processamento de um conjunto de entradas, esta saída
pode fazer parte do conjunto de entradas de outros neurônios ou como uma
das saídas da rede.
O neurônio possui duas fases de processamento. Na primeira fase, calcula-se
o somatório do produto das entradas pelos pesos associados. Na segunda, é
atribuída uma função não linear, chamada de função de ativação, que é
aplicada ao somatório resultante da primeira fase. Na Figura 8, tem-se o
processo descrito anteriormente.
Figura 8. Modelo de Neurônio formal de McCulloch e Pitts.
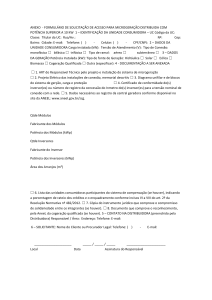
Na Figura 9, tem-se uma rede neural multicamadas com arquitetura do tipo
feedforward (Rede Neural Unidirecional), com uma camada de entrada, duas
intermediárias (ocultas) e uma de saída. Normalmente é conveniente adicionar
na camada de saída e nas camadas intermediárias, uma entrada extra
(chamada de bias) com valor unitário, Haykin (2001). Desta forma, todos os
neurônios são interconectados através dos pesos.
Figura 9. Arquitetura de uma rede neural artificial tipo feedforward.
4.1. Seleção de Dados Através do Filtro Seletivo
No uso de Redes Neurais a definição de sua arquitetura e de seu treinamento
são etapas que dependem diretamente da quantidade e da qualidade dos
dados utilizados. A qualidade dos dados é importante principalmente em Redes
Neurais de classificação e em aplicações de identificação de forças de
excitação em sistemas mecânicos complexos, Lépore et al. (2000).
Os dados obtidos, através da análise de vibração, trazem no espectro, além
das informações relacionadas com os defeitos propriamente ditos, ou seja,
suas freqüências determinísticas, outras informações que podem ser
descartadas, inclusive ruídos. Para reduzir o numero de parâmetros capazes
de representar os sinais que serão utilizados para o treinamento e validação
das redes neurais artificiais será implementado um filtro seletivo que
selecionará somente as freqüências determinísticas e suas amplitudes
relacionadas com as excitações de interesse, Brito et al. (2005).
O filtro seletivo possibilita a geração do conjunto de treinamento, ou dados de
validação, já processados para serem fornecidos à entrada das redes. Estes
dados são salvos em qualquer unidade do computador ficando disponíveis para
utilização futura.
Utilizou-se o filtro seletivo para selecionar as freqüências de rotação e suas
harmônicas até a quinta ordem, relacionadas aos problemas de origem
mecânica (desbalanceamento, desalinhamento e folga mecânica). Para o caso
específico da cavitação por ser uma falha diagnosticada por bandas largas de
freqüências aleatórias utilizou-se uma condição na programação pela qual o
filtro seletivo identifica significativas amplitudes em altas freqüências.
Na primeira etapa de funcionamento o filtro seletivo separa as diferentes
condições de testes em arquivos específicos. Posteriormente ocorre a seleção
das freqüências determinísticas, sendo gravadas na forma matricial para
integração à rede neural artificial.
4.2. Aplicação de Redes Neurais Artificiais à detecção e diagnóstico de
falhas
Em geral, uma Rede Neural Artificial (RNA) é um sistema constituído por
elementos de processamento interconectados, chamados neurônios, os quais
estão dispostos em camadas, sendo que cada neurônio é responsável pelo
mapeamento linear e não-linear de dados de entrada/saída, determinado
principalmente pela sua função de ativação, Santiago (2003).
Os campos de aplicação para as redes neurais são amplos: análise e
processamento de sinais, controle de processos, classificação de dados,
reconhecimento de padrões, análise de imagens, diagnóstico médico, entre
outros. Na área industrial, destacam-se as redes neurais utilizadas na
prevenção de desvios de processos e em sistemas híbridos, associados às
técnicas de lógica fuzzy e sistemas especialistas, para detecção de problemas
de manutenção. Tratam-se, normalmente, de problemas com quantificação
matemática difícil, ineficaz ou até mesmo impossível, Brito (2002).
A principal etapa para o desenvolvimento da RNA para detecção e diagnóstico
de falhas em bombas centrífugas, foi a determinação dos melhores parâmetros
matemáticos e de arquitetura da RNA.
Estipulou-se que as entradas da rede neural seriam as amplitudes colhidas no
plano radial (posição vertical e horizontal) e axial, além do indicativo de
presença de significativas amplitudes em altas freqüências. Já a saída seria a
falha detectada na forma matricial.
Dessa forma, utilizando as regras propostas por Haykin (2001), foram treinadas
e comparadas três arquiteturas de RNAs, 3x3x1, 3x5x1 e 3x10x1, com erro
desejado de 0,5 %, taxa de aprendizagem de 0.01, constante e momento 0.5,
inicialização de pesos aleatórios e número máximo de épocas de 300.
As topologias foram desenvolvidas utilizando o método de treinamento
Retropropagação do erro backpropagation através do aprendizado
supervisionado e sendo otimizada pelo método de Levemberg-Marquardt.
Utilizou-se a função sigmoidal, como função de ativação dos neurônios de
entrada e neurônios intermediários, para o neurônio de saída utilizou-se a
função linear. A velocidade de ativação utilizada foi de 0,001.
Dividiu-se a tarefa de concepção da rede em duas fases, inicialmente a fase de
treinamento, na qual utilizamos 60 % dos espectros do banco de dados e após
o treinamento ser concluído satisfatoriamente, inserimos os espectros restantes
para a validação da RNA.
5. ANÁLISE DOS RESULTADOS EXPERIMENTAIS
Os mesmos procedimentos realizados para a detecção das falhas no motor
ligado diretamente à rede foram utilizados para detecção das falhas no motor
acionado pelo inversor de freqüência. Os sinais reais de falha foram coletados
em um intervalo menor de freqüência para que fossem isoladas as freqüências
determinísticas de cada falha, podendo assim fazer um diagnostico mais fiel da
influência da utilização do inversor de freqüência.
Mesmo com o aumento das amplitudes das falhas a influência do inversor de
freqüência no aumento do nível global e vibração se mantiveram praticamente
a mesma, sendo de 9,5% para o caso de desbalanceamento, 59% para um
motor com folga mecânica, 9% para o caso de desalinhamento e de 8,5% para
a combinação das falhas.
Temos também que utilização do inversor de freqüência modificou em 4% a
freqüência da primeira freqüência de rotação do motor (1xFr), caindo de 14,6
Hz, no motor ligado diretamente à rede, para 14 Hz, como mostram as figuras
10.a e 10.b, mesmo fazendo o motor acionado pelo inversor funcionar na
freqüência nominal de rotação, que no caso é de 860 RPM.
Figura 10.a. sem inversor.
Figura 10.b. inversor WEG.
Durante o desenvolvimento da rede neural pode-se observar que alguns
parâmetros modificavam mais significantemente o desempenho da RNA, vale
salientar o caso da taxa de aprendizagem, a qual foi muito modificada durante
a concepção da rede, pois não encontrava-se uma faixa de valores que faziam
a RNA convergir facilmente, dessa forma observou-se que esse parâmetro na
prática não obedece nenhum critério teórico, pois chegou-se a seu melhor valor
variando-o por métodos de tentativa e erro.
A determinação do formato dos dados de entrada foi muito variada também,
até que se chegou à conclusão de que uma matriz de três linhas,
representando as vibrações colhidas nos dois planos de medição da máquina,
na qual as colunas representavam as amplitudes de vibração possibilitou um
melhor resultado.
Analogamente a definição do formato da saída dos dados fora muito variada,
até que se chegou à forma mais viável, que seria uma matriz de uma linha com
cinco colunas, a qual representa as falhas estudadas e a condição sem defeito.
Estudam-se ainda outras variáveis, como rotação e potência do motor acoplado
à bomba, que possam tornar a Rede Neural Artificial desenvolvida em uma
aplicação de uso geral em qualquer tipo de conjunto motor-bomba, eliminando
a desvantagem de que a RNA para ser aplicada levaria um significante tempo
para confeccionar-se um banco de dados.
A seguir, apresenta-se os resultados obtidos a partir da implementação e
treinamento das arquiteturas de redes neurais citadas, com o algoritmo
backpropagation, utilizando dados reais como parâmetros de entrada da rede.
Na Figura 11, tem-se a taxa de acerto individual para cada tipo de falha em
cada arquitetura estudada das redes neurais artificiais durante o seu
aprendizado (treinamento).
Figura 11. Porcentagem de Acerto das Redes Neurais Artificiais durante o
treinamento.
Já na Figura 12 tem-se a taxa de acerto individual, para os quatro tipos de falha
estudados, nas três topologias de rede durante a sua simulação (validação).
Figura 12. Porcentagem de Acerto das Redes Neurais Artificiais durante a
validação.
Na Tabela 1, têm-se os resultados globais (média da taxa de acerto, para as
falhas estudadas) das cinco topologias de redes elaboradas.
Tabela 1. Resultados globais das arquiteturas de Redes Neurais Artificiais.
Taxa de Acerto (%)
Arquiteturas
Taxa de Acerto (%)
Validação
Treinamento
3x3x1
95,00
93,75
3x5x1
93,25
91,75
3x10x1
93,50
90,00
Analisando os resultados apresentados anteriormente, pode-se concluir que as
três arquiteturas desenvolvidas foram eficientes com taxas de acerto superiores
à 90 %. Porém deve-se ressaltar que para um perfeito diagnóstico a RNA deve
apresentar a melhor taxa de acerto possível, ou seja no nosso caso a rede
3x3x1 apresentou o melhor resultado global.
6. CONCLUSÃO
Os resultados mostram que a utilização dos inversores de freqüência
realmente causam um relativo aumento da amplitude das falhas mecânicas,
sendo possível através deste estudo quantificar esse aumento de vibração
para cada falha independente.
A dificuldade da utilização das redes neurais é que a fase de definição é
delicada, pois envolve, além da escolha da topologia da rede, a obtenção
do conjunto de variáveis significativas para a resolução do problema. Essa
obtenção envolve, além da identificação das variáveis que estão
relacionadas com o problema, a remoção de variáveis não confiáveis para
o processo, ou cujo uso seja impraticável por razões técnicas e
econômicas.
Mas passado este estágio as Redes Neurais Artificiais possibilitam o
monitoramento on-line da manutenção preditiva visando à minimização do
tempo entre o recebimento das informações e a detecção e o diagnóstico
do problema, por isso, é uma ferramentas que tem despertado grande
interesse de pesquisadores nos últimos anos, por ser uma ferramenta que.
Diante dos resultados apresentados, observou-se que dentre muitos
aspectos teóricos e práticos que fazem parte de um projeto de rede neural,
a escolha de uma arquitetura de rede neural e de seus parâmetros de
treinamento não segue regras predefinidas, o conhecimento e experiência
do projetista em relação ao problema enfrentado são mais importantes.
Adicionalmente, observou-se que a sensibilidade e o tempo de resposta
das redes neurais em relação a outras técnicas de diagnóstico de falhas
são aspectos importantes e que podem ser avaliados e melhorados
durante as fases de implementação, treinamento, teste e validação da rede
neural.
Os resultados mostram a partir de um caso real, a capacidade e viabilidade
da aplicação de redes neurais como ferramenta bastante eficiente na
detecção e diagnóstico de falhas em conjuntos motor-bomba.
Em suma, destaca-se que o desenvolvimento experimental de técnicas de
inteligência artificial combinadas com as tradicionais técnicas de
manutenção preditiva proporciona detecção e diagnóstico de falha quase
que imediato para o equipamento monitorado, além de consistir uma
ferramenta de baixo custo, e com a sua constante implementação e
desenvolvimento, poderá ser no futuro a saída mais viável para uma
manutenção industrial eficiente e eficaz.
7. REFERÊNCIAS BIBLIOGRÁFICAS
Baccarini, L. M. R., Detecção e Diagnóstico de Falhas em Motores de Indução,
Belo Horizonte, Faculdade de Engenharia Elétrica, Universidade Federal de
Minas Gerais, 2005. Tese (Doutorado).
Brito, J. N. Desenvolvimento de um sistema inteligente híbrido para diagnóstico
de falhas em motores de indução trifásicos. Campinas: Universidade
Estadual de Campinas, 2002. Tese (Doutorado).
Brito, J. N., Brito, Roberto, R. e Pederiva, R., “Aplicação de Redes Neurais
Artificiais para Detecção de Falhas em Motores Elétricos”, COBEM, 2001.
Brito, J. N., Lamim Filho, P. C. M., Pederiva, R., “Detecção de Falhas em
Motores Elétricos Através da Análise de Corrente e Análise de Fluxo
Magnético”, X Seminário Brasileiro de Manutenção Preditiva e Inspeção de
Equipamentos, São Paulo, 2004.
Brito, J. N., Tavares, F. e Pinto, G. R., Implementation of the hybrid paradigm of
weight’s initialization for application in artificial neural networks multilayer,
18th International Congress of Mechanical Engineering. Proceedings of
COBEM 2005.
Carvalho, D.F., Instalações elevatórias - bombas. 6.ed. Belo Horizonte:
FUMARC, 1999.
Demuth, H., Meale M. Neural Network Toolbox for use with MATLAB. User
Guide Version 6. The Mathworks, 2003.
Gurgel, B. B. F. A., “Proposição de uma Metodologia para Avaliação de
Inversores de Freqüência em Estações Elevatórias de Água Estudo de
Casos no Sistema de Abastecimento de Água de são José dos Campos”,
São Paulo: Faculdade de Engenharia Hidráulica e Sanitária da Escola
Politécnica, Universidade de São Paulo, 2006. Tese (Mestrado).
Haykin, S. “Redes Neurais: Principio e Pratica”. 2ª ed. Bookman. 2001.
IEEE Recommended Practices and Requirements for Harmonic Control in
Electric Power Systems." Project IEEE-519. October 1991.
Lépore, F. P., Santos, M. B., Oliveira, A. G., “Detecção de Defeitos em
Máquinas Rotativas Utilizando Redes Neurais Artificiais e Sinais de
Vibração Tratados Utilizando Wavelts”. Congresso Nacional de Engenharia
Mecânica, Natal, Brasil, Proc. In CDROM, 2000.
Marchand, P., Holland, O. T., Graphics and GUIs with Matlab Third Edition.
Champman & Hall/CRC, 2003.
Mascheroni, J. M. e Lichtblau, M., “Guia de Aplicações de Inversores de
Freqüência”, WEG, 2002.
Mataix, C. Turbomáquinas Hidráulicas. Madrid, ICAI, 1997.
Santiago, D. F. A., Pederiva, R., “Comparison of Optimization Techniques of
Neural Networks Training for Faults Diagnostic of Rotating Machinery”. First
South-American Congress on Computational Mechanics - MECOM, SantaFé/Paraná, Argentina. Mecánica Computacional, v.21, pp. 1912-1921,
2002.
Santiago, D. F. A. “Diagnóstico de Falhas em Máquinas Rotativas Utilizando
Transformada de Wavelet e Redes Neurais Artificiais”, Campinas,
Faculdade de Engenharia Mecânica, Universidade Estadual de Campinas,
2003. Tese (Doutorado).