Farol acústico subaquático com controlo remoto-2º Relatório de progresso
Farol Acústico Subaquático
com controlo Remoto
2º Relatório de Progresso
1/10
Farol acústico subaquático com controlo remoto-2º Relatório de progresso
Índice
1- Objectivos……………………………………………….……pág. 1
2- Descrição do trabalho realizado………………………….…...pág. 1
3- Principio de Funcionamento................……….………………pág. 1
4- Descrição de Funcionamento....................................................pág. 1
4.14.2-
Placa de recepção de sinais com amplificação........pág. 1
Placa auxiliar...........................................................pág. 2
5- Esquemas Gerais.......................................................................pág. 2
6- Implementação..........................................................................pág. 3
6.1- Placa de recepção de sinais com amplificação.........pág. 4
6.1.1- Andar de Amplificação..................................pág. 5
6.1.2- Filtros Analógicos..........................................pág. 6
6.1.3- Circuito de Detecção......................................pág. 8
6.1.4- Calibração.......................................................pág.10
7- Conclusões................................................................................pág. 11
2/10
Farol acústico subaquático com controlo remoto-2º Relatório de progresso
1. Objectivos:
Tínhamos como objectivo para este período, o projecto e execução da placa de recepção de sinais com
amplificação e de uma placa de recepção para aumentar o números de sinais que é possível identificar
(para servir de apoio à primeira). Foi também uma prioridade a definição final das diversas configurações
que poderíamos ter.
2. Descrição do trabalho realizado:
Para projectar uma placa é necessário definir as funcionalidades que se esperam dela, partindo dessas
funcionalidades é necessário idealizar os esquemas que as podem implementar, os componentes que são
necessários e que se encontram disponíveis para serem utilizados, sendo que no nosso projecto temos de
projectar cada placa com a preocupação de poupar energia e utilizar o mínimo espaço. Depois da
idealização partimos para a realização dos desenhos esquemáticos, onde é necessário desenhar figuras
para representar cada um dos componentes e implementar os esquemas idealizados tendo em
consideração que os desenhos esquemáticos vão ser implementados na placa de PCB.
Desenhados os esquemáticos é necessário definir o layout dos componentes no PCB, as linhas de ligação
entre eles, passos estes que devido à extrema preocupação com o espaço tiveram de ser realizados
manualmente.
Depois de executados estes passos, deixamos o software de lado e passamos à realização física das placas,
que no nosso caso foi executada usando o método fotográfico de realização de PCB’s. Depois de a placa
se estar feita, é necessário furar os buracos para cada componente, soldar cada componente, calibrar os
componentes e testar o seu funcionamento.
3. Princípio de funcionamento:
A medição de distâncias baseia-se na contagem do tempo de propagação de ondas sonoras no meio
subaquático, assumindo um valor constante para a velocidade média de propagação do som neste meio,
como base nesta constatação é necessário um que transdutor emite um sinal acústico a uma dada
frequência, sendo este sinal sintonizado pelo dispositivo respectivo, que responde com outro sinal
acústico. A contagem do tempo entre a emissão e a recepção permite calcular a distância ao dispositivo,
assumindo um valor médio para a velocidade de propagação do som na água.
4. Descrição de funcionamento:
4.1) Placa de recepção de sinais com amplificação:
Esta placa destina-se a receber os sinais que são recebidos pelo transdutor, amplificá-los e filtrar o sinal,
criando uma saída digital alta quando é detectado um dos sinais que é pretendido identificar. Essa saída é
produzida no canal correspondente ao sinal que foi recebido. A partir desta etapa a placa tem dois modos
de funcionamento: o primeiro em que se destina a funcionar sem placa de controlo, em que a partir do
reconhecimento que chegou o sinal seleccionado (podendo ir até 8 sinais possíveis se estiver ligada a
placa de recepção auxiliar) pelo jumper e se cria um atraso de 50ms para depois se emitir um sinal de
reconhecimento de 100s, que é enviado para a placa de emissão; no segundo modo a placa está a
funcionar com a placa de controlo ligada, neste modo a placa tem todas as saídas de reconhecimento
3/10
Farol acústico subaquático com controlo remoto-2º Relatório de progresso
(podendo ir novamente até 8 sinais) ligadas a si, sendo assim possível programar na placa de controlo o
sinal a queremos responder.
4.2) Placa de recepção auxiliar:
Esta placa limita-se a receber o sinal amplificado da placa de recepção com amplificação, a filtrar,
criando uma saída digital alta quando é detectado um dos sinais que é pretendido identificar. Essa saída é
produzida no canal correspondente ao sinal que foi recebido, sendo em tudo idêntico ao módulo de
filtragem da placa anterior.
O sinal amplificado e a referência a utilizar pelos amplificadores são entregues pela placa de recepção
com amplificação à placa de recepção auxiliar para permitir a filtragem de mais 4 sinais, sendo assim
possível a filtragem de quatro sinais na placa com amplificação e de mais quatro na placa auxiliar.
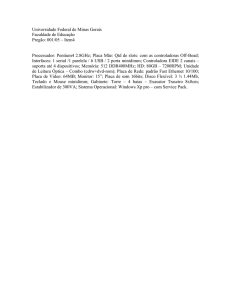
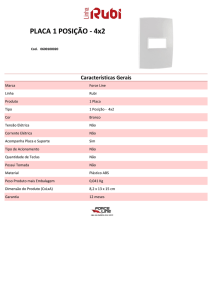
5. Esquemas gerais:
Esquema de funcionamento (sem placa de controlo)
Sinal
Recebido
Sinal
amplificado
Placa de
recepção com
amplificação
Vref
Sinal de
reconhecimento
Placa de
emissão
(em execução)
Sinal de
resposta
Sinal digital de
recepção de sinal
Placa de
recepção
auxiliar
Com este tipo de configuração temos uma maneira muito simples de executar a tarefa de recebendo um
sinal, enviar um sinal como resposta a esse mesmo sinal.
Como contrariedade temos que apontar que este sistema tem uma configuração difícil de se fazer e não
consegue explorar todas as potencialidades que o conjunto formado pela placa de recepção e pela placa de
emissão oferecem. Assim toda a selecção de sinais a identificar, a escolha do sinal com que vamos
responder a determinado sinal recebido é feito manualmente.
4/10
Farol acústico subaquático com controlo remoto-2º Relatório de progresso
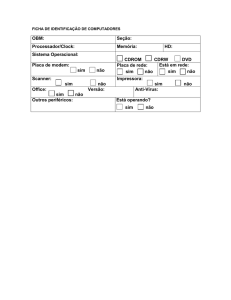
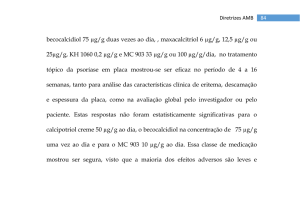
Esquema de funcionamento (com placa de controlo)
Sinal
Recebido
Sinal
amplificado
Placa de
recepção com
amplificação
Sinal digital de
recepção de sinal
Placa de
emissão
(em execução)
Sinal de
resposta
Vref
Sinal digital de
recepção de sinal
Placa de
recepção
auxiliar
Sinal de
reconhecimento
Placa de
controlo
(em execução)
Com esta configuração, que já inclui a utilização de um microcontrolador, já é possível explorar todas as
potencialidades do conjunto, dado que podemos responder a vários sinais diferentes e em frequências que
poderão ser também diferentes. Tudo isto é assim possível porque com a inclusão no microcontrolador,
essa escolha é feita por software. Assim tendo a placa de controlo como informação a chegada de
determinado sinal, tem na sua memória qual o sinal com que se irá responder, actuando na placa de
emissão, através da selecção do sinal pretendido.
Poderá inclusivamente e dependendo do
desenvolvimento do software e do hardware, serem integradas diversas funcionalidades que podem ser
‘penduradas’ na porta-série do micro.
6. Implementação:
6.1) Placa de recepção de sinais com amplificação:
O sinal é recebido pelo transdutor sendo depois recebido no conector J4, de referir a utilização de
conectores duplos para evitar o aparecimento de folgas no conector, este sinal é entregue num módulo que
vai proceder à sua amplificação. O sinal já amplificado será então disponibilizado para a placa auxiliar, e
para o conjunto 4 módulos de filtragem desta placa. Cada um destes módulos independentes
correspondente a uma frequência de detecção, sendo constituído por um filtro analógico de Q elevado,
seguido de um circuito de detecção.
5/10
Farol acústico subaquático com controlo remoto-2º Relatório de progresso
6.1.1) Andar de amplificação
O funcionamento do receptor acústico assenta num conjunto de andares amplificadores e de filtros
analógicos, implementados com amplificadores operacionais, que a seguir se descrevem:
Os andares de amplificação baseiam-se em amplificadores operacionais 0-5V (U4A, U4B,
U4C e U5A), com referência a 2,5V e ganho 12,1 (aproximadamente 21dB).
Entre os andares existem condensadores de 10nF, constituindo filtros passa-alto em série
com as resistências de 8,25k, de frequência inferior de corte de 1,93KHz. Estes filtros
eliminam a componente DC do sinal.
Os condensadores de 10pF que se encontram em paralelo com as resistências de 100k, na
realimentação, constituem filtros passa-baixo, com frequência superior de corte de
159,24KHz, para eliminar ruído.
Os 4 andares de amplificação têm díodos limitadores, que limitam a amplitude do sinal a
VD (aproximadamente 0,7V).
O 3º andar (U4D) apresenta uma configuração passa-banda, de ganho Ho, frequência central
fo e Qo dados por (“Operational Amplifiers Design and Applications”, Eds. Tobey, Graeme,
Huelsman, McGraw-Hill 1971, Ch.8, pp.292):
Ho
1
R38 C 23
1
R35 C 26
Wo
1
Q
1
1
1
Wo
1
5
1
30,33KHz
1,9 10 rad s fo
R35C 26C 23 R38 R 41
2
C17
1
C16 1
1
C16
C17 2
1
R7
R5 R 6
Q2
No último andar encontra-se um circuito sintonizador (U1A, U2A, U1C, U2C) à frequência
1
, em que o valor de C é de 14,7 nF. Existem 4 andares destes ligados em
f
2 LC
paralelo com o objectivo de cada um deles sintonizar uma de 4 frequências (26 KHz, 27
KHz, 28 KHz, 29KHz.
Nesta placa, a bobina é construída de modo a que o valor de L esteja muito perto do
necessário para obtermos a frequência de ressonância desejada. Como a bobina é de núcleo
variável, o ajuste final é feito alterando a sua posição.
Depois do andar de sintonia temos um amplificador operacional (U1B, U2B, U1D, U2D)
que está a ser usado como comparador. Dando como exemplo o andar de 26 KHz podemos
explicar o seu funcionamento: que a entrada negativa está ligada a um divisor de tensão,
constituído por R9 e R13. Como R9 varia entre 0 e 100k, pode-se variar a tensão da entrada
negativa entre (68/168*VCC)e VCC. A entrada positiva está ligada ao emissor de Q1. Este
transístor está ligado como 2 díodos - um para evitar que o condensador C7 descarregue para
trás e outro para evitar que a tensão de saída do amplificador operacional U1A seja maior do
que VCC. A configuração R6, R8 e C7 (juntamente com o transístor) funciona como um
detector de envolvente – quando a tensão de saída de U1A começa a subir, o condensador
C7 carrega com uma constante de tempo =R6.C7 (muito rápido). Assim que a tensão de
saída de U1A decresce, a junção Base-Emissor do transístor fica contra-polarizada e o
condensador descarrega lentamente por R8. O condensador volta a carregar assim que a
saída de U1A voltar a ultrapassar o seu valor de tensão.
6/10
Farol acústico subaquático com controlo remoto-2º Relatório de progresso
O comparador U1B é activado assim que o valor da tensão de saída de U1A ultrapassar em
0,7V o valor definido pelo divisor de tensão constituído por R 9 e R13.
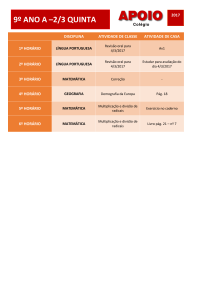
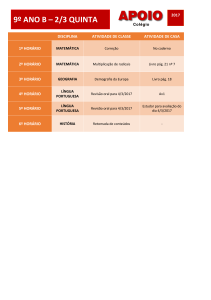
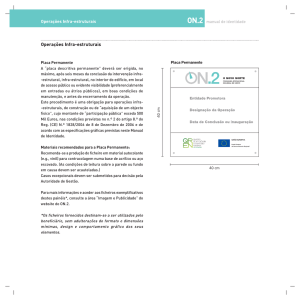
6.1.2) Filtros analógicos
Cada filtro analógico foi projectado através da incorporação de um par LC paralelo na realimentação de
um amplificador operacional, conforme se pode ver na figura 4:
C
L
R2
R1
VIN
VOUT
+
V+
Figura 1 - Esquema de um Filtro Passa-Banda
Numa configuração LC paralelo ideal, as impedâncias da bobina, do condensador e do circuito paralelo
equivalente são dadas por, respectivamente:
ZL j 2 f L
ZC
1
j 2 f C
ZL ZC
Zeq
ZL ZC
L
C
j 2 f L
1
j 2 f C
j 2 f L
1 4 2 f 2 LC
A frequência de ressonância corresponde a uma impedância equivalente infinita, e é dada por:
fo
1
2 LC
A esta frequência, os amplificadores passam à configuração inversora normal, em que o ganho é
simplesmente ditado pelo quociente entre as 2 resistências (-R2/R1, no caso da figura 4).
Quando a frequência se afasta da frequência de ressonância, a impedância equivalente do paralelo LC tem
um valor finito e, portanto, o valor absoluto do ganho total do amplificador é menor. Para se calcular o
ponto onde o ganho decresce 3dB, é necessário resolver a seguinte equação:
Zeq / / R 2
2
Zeq R 2
R2
R2
2
Zeq R 2
2
2 Zeq Zeq R 2
Uma vez que Zeq e R2 são ortogonais, pode-se dizer que as frequências correspondentes a atenuações de
3dB ocorrem quando:
Zeq R2 Zeq R2
7/10
Farol acústico subaquático com controlo remoto-2º Relatório de progresso
Resolvendo em ordem à frequência, resulta em:
4CR 2 2
L
4 CR 2
1 1
f1
4CR 2 2
L
4 CR 2
1 1
f2
O factor Q do filtro é dado por:
1
fo
CR 2
C
2 LC
Q
R2
1
f2 f1
L
LC
2 CR2
Numa situação real, um condensador tem uma resistência de fugas, em paralelo com os seus terminais, e
uma bobina tem uma resistência DC não nula em série com a indutância, devido à resistividade do
condutor usado no enrolamento (R=.l/s).
Em relação aos condensadores, é frequente encontrarem-se valores de dezenas ou centenas de M para a
resistência de fugas, pelo que não afectam de maneira significativa o valor da frequência de ressonância.
O caso das bobinas é diferente, uma vez que possuem frequentemente valores significativos para a
resistência DC, particularmente para indutâncias elevadas. Neste caso, o valor da frequência de
ressonância anteriormente calculado é afectado, passando a ser dado por1:
L
RDC 2
C
f 'o
2 L
Uma análise às equações atrás indicadas permite identificar alguns compromissos nas escolhas dos
valores:
Para melhorar a separação de cada filtro, devemos ter um Q elevado;
Aumentando muito o valor de Q torna o filtro muito dependente da estabilidade de
L e C;
Aumentando o quociente C/L torna a frequência de ressonância mais dependente
do valor da resistência DC da bobina;
Para valores reduzidos de indutâncias (i.e. para minimizar tamanho e reduzir
resistência DC), tem de se elevar o valor da capacidade, o que é difícil com boas tolerâncias
à temperatura;
Aumentando o valor de R2 torna-o comparável com o valor da impedância do
paralelo LC.
Implementação dos filtros
Uma vez que os cenários onde o localizador acústico é usado apresentam algumas variações nas
condições ambientais (em particular de temperatura), é necessário utilizar componentes de elevada
1
Para se deduzir esta expressão, é necessário somar o valor da resistência DC à impedância da bobina e seguidamente achar a
frequência para a qual o valor da impedância equivalente é puramente resistivo.
8/10
Farol acústico subaquático com controlo remoto-2º Relatório de progresso
precisão e, acima de tudo, de baixa variação com a temperatura. Em relação aos condensadores, o ideal
seria utilizar NPO/COG, mas tais tecnologias apenas estão normalmente disponíveis para valores muito
baixos de capacidade (até cerca de 1nF) e são difíceis de encontrar no mercado. De um modo geral,
podem-se usar condensadores cerâmicos multilayer, que também apresentam pouca variação com a
temperatura e são fáceis de encontrar, ou então adquirir condensadores de precisão Silvered Mica, com
tolerância de 1%. Estes condensadores têm um custo bastante elevado, mas deverão ser utilizados no
andar de sintonia para assegurar grande estabilidade na frequência de ressonância.
No que diz respeito às resistências, nos circuitos de filtragem analógica foram utilizadas resistências de
filme metálico com uma precisão de 1%.
Em relação às bobinas, optou-se por modelos de núcleo ajustável uma vez que desta forma é possível
fixar um valor de capacidade (para condensadores de precisão há poucos valores standard) e depois
calibrar o valor de L até se obter a sintonia à frequência desejada. Foram escolhidos kits de bobinas onde
é necessário enrolar o fio necessário, de acordo com a equação aproximada:
n
L
AL
onde L é a indutância desejada, em nH, e AL é uma constante dependente das dimensões do kit que, neste
caso, vale 250. As bobinas foram projectadas para um valor nominal próximo dos valores pretendidos e
assim calculado o numero de voltas necessários.
Após a sua construção, os valores mínimos, máximos tanto da resistência como da indutância foram
medidos nas oficinas do DEEC:
Frequência dos
Filtros(KHz)
Bobina
Indutância
Indutância
Mínima (mH)
Máxima (mH)
Condensador
(nF)
26
L1-Placa c/ amp
2,3608mH
2,7808mH
14.7
27
L2-Placa c/ amp
2,1840mH
2,5727mH
14.7
28
L3-Placa c/ amp
2,0060mH
2,4170mH
14.7
29
L4-Placa c/amp
1,7736mH
2,1038mH
14.7
Com estes valores, foram escolhidas combinações de condensadores e bobinas de tal modo que o valor da
frequência de ressonância pretendida estivesse englobado pela variação da indutância (através da
actuação na posição do núcleo ajustável).
Finalmente, no que diz respeito aos amplificadores operacionais, os circuitos de sintonia foram
implementados com circuitos integrados TLV2264 e TLV2262, com a diferença entre eles a residir no
facto de terem 2 ou 4 amplificadores . Estes circuitos cumprem os requisitos necessários a um sistema
como o que foi desenvolvido: baixo consumo energético, operação rail-to-rail e alimentação com uma
tensão única (single supply). Um parâmetro adicional que é extremamente importante para os circuitos de
sintonia é uma taxa máxima de variação (slew rate) bastante alta, de tal modo que os sinais de entrada não
tenham o crescimento limitado pelos amplificadores operacionais. Existe uma variação directa do
consumo energético com a slew rate, pelo que escolhemos este modelo de modo a que permita trabalhar
com a máxima frequência e amplitude envolvidas, mas sem as exceder em demasia, de modo a evitar um
aumento desnecessário do consumo.
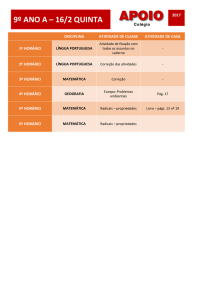
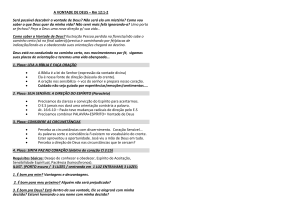
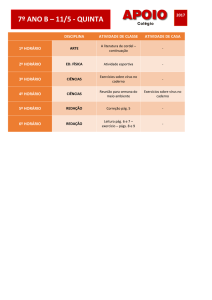
6.1.3) Circuito de detecção
Tal como foi atrás referido, a saída de cada filtro de sintonia passa por um circuito de detecção,
constituído por um detector de envolvente e por um comparador, segundo o esquema apresentado na
figura 5:
9/10
Farol acústico subaquático com controlo remoto-2º Relatório de progresso
VCC
R5
Q1
VOUT
R1
Detect
VCC
R2
C1
R3
R4
C2
Figura 2 - Esquema do Circuito Detector
Neste circuito, o amplificador operacional está a ser usado como comparador. A entrada negativa está
ligada a um divisor de tensão, constituído pela resistência R3 e pelo potenciómetro R4, pelo que a tensão
negativa pode variar entre VCC * R3 / (R3+R4) e VCC. A entrada positiva está ligada ao emissor de Q1,
passando pela resistência R1. Este transístor está ligado como 2 díodos - um para evitar que o
condensador C1 descarregue para trás e outro para evitar que a tensão de saída V OUT seja maior do que
VCC. A configuração R1, R2 e C1 (juntamente com o transístor) funciona como um detector de envolvente
– quando a tensão de saída (VOUT) começa a subir, o condensador C1 carrega com uma constante de
tempo = R1*C1 (muito rápida). Assim que VOUT decresce, a junção Base-Emissor do transístor fica
contra-polarizada e o condensador descarrega lentamente por R2. O condensador volta a carregar assim
que VOUT exceder em 0.7V a tensão aos seus terminais.
Pela análise anterior, verifica-se que o sinal de detecção é activado (nível lógico High) sempre que o valor
da tensão VOUT ultrapassar em 0.7V o valor definido pelo divisor de tensão constituído por R 3 e R4. Desta
forma, consegue-se calibrar a sensibilidade do circuito, actuando no potenciómetro R 3 para subir ou
descer o limiar de detecção. Em zonas de baixo ruído acústico, pode-se usar um valor relativamente baixo
para este limiar, conseguindo aumentar a máxima distância detectada. Com valores elevados de ruído, é
necessário aumentar o limiar de detecção para evitar que haja detecções falsas provocadas pelo ruído.
Tal como no caso dos circuitos de sintonia, escolheram-se resistências de precisão para o divisor de
tensão constituído por R3 e R4, uma vez que é a parte do circuito que maiores problemas poderá causar
caso exista uma variação dos valores dos componentes.
No que diz respeito aos amplificadores operacionais, tal como os circuitos de filtragem, os circuitos de
detecção foram implementados com circuitos integrados TLV2264.
6.1.4) Calibração
Para o ajuste de L para estar perto do valor nominal é necessário ligar o gerador de sinais de modo a
termos uma sinusóide à entrada com a frequência de ressonância de cada módulo. Ajustar o núcleo da
bobina de modo a maximizar o valor da tensão de saída.
Regular o potenciómetro de saída de modo ao detector ser activado numa margem de 200-300Hz em
volta da frequência nominal.
7. Conclusões:
Para concluir é de referir que a placa por nós projectada funcionou dentro do previsto conseguido
distinguir os diferentes sinais e gerar as saídas digitais apropriadas. Sendo que a operação de calibração
correu dentro do previsto, isto é conseguimos calibrar correctamente os filtros para as frequências
desejadas. De referir que os testes executados foram totalmente experimentais, isto é guardamos para
mais tarde os testes usando o sensor que recebe os sinais na água.
10/10