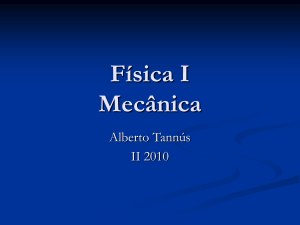
UNIVERSIDADE FEDERAL DO PARÁ INSTITUTO DE CIÊNCIAS EXATAS E NATURAIS COORDENAÇÃO DO CURSO LICENCIATURA EM FÍSICA -­‐MODALIDADE A DISTÂNCIA-­‐ Mecânica Clássica (Notas de Aula) MÓDULO 4 (Dinâmica 1) 2015 A dinâmica é o estudo do movimento sob à ação de uma força. Os princípios da dinâmica estão associados as leis de Newton, que descrevem o movimento e suas causas. Para entendermos as leis de Newton é necessário compreender os conceitos de força e massa, a partir de situações realísticas que proporciona um entendimento razoável desta grandezas. A força é uma grandeza vetorial que representa a intensidade da interação entre dois corpos. Para um estudo macroscópico é possível ter a noção de força associada à algumas aplicações cotidianas, tais como: o empurrar de uma caixa, levantamento de um objeto... A massa de um corpo está associada as propriedades do movimento: aceleração e inércia (capacidade do corpo de se opor ao movimento). 1. LEIS DE NEWTON Estudaremos as leis de Newton aplicadas a um conceito de massa que considera um objeto, que se desloca no espaço, sem levar em conta suas dimensões. Esta massa é definida como partícula ou massa pontual. 1a -­‐ Um corpo não altera seu estado de repouso ou movimento uniforme, exceto pela atuação de uma força externa. 2 a -­‐ A força resultante 𝐅, sobre a partícula é igual ao produto da sua massa m pela aceleração a. 𝐅 = 𝑚𝐚 (1) onde F é soma vetorial de todas forças que agem na partícula e a é a aceleração da partícula, podendo também a equação (1) ser representada de forma equivalente, por meio da velocidade e vetor posição 𝐅 = 𝑚𝐯 (2) 2 𝐅 = 𝑚𝐫 (3) 𝐅! 𝐅 = 𝐅! + 𝐅! + ⋯ + 𝐅! 𝐅! 𝐅! Figura 1: Resultante das forças que agem num corpo. Outra forma de representar a segunda lei é por meio do conceito de momento linear (ou quantidade de movimento) da partícula, definido como 𝐩 = 𝑚𝐯 (4) admitindo que não ocorra uma variação temporal na massa 𝐩 = 𝑚𝐯 (5) logo, uma outra forma para a segunda lei será 𝐅=𝐩≡
𝑑𝐩
(6) 𝑑𝑡
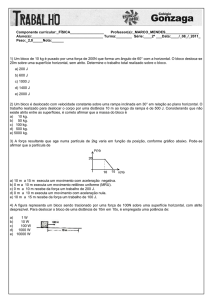
A unidade de força no Sistema Internacional é o newton (N) que é a força necessária para acelerar uma massa de 1 Kg com uma aceleração de 1 m/s2. 3a -­‐ Para dois corpos que exercem forças entre si, as forças terão magnitude iguais e sentidos e direção opostas. 3 SISTEMA DE REFERENCIAL INERCIAL1 As leis de Newton são postuladas sob a hipótese de que todas as medidas e observações são tomadas em relação a um sistema de coordenada ou sistema de referencial que está fixo no espaço ou está em repouso absoluto. Esta é a hipótese de que espaço e movimentos são absolutos. Entretanto, deve ficar bem claro que uma partícula pode estar em repouso ou com um movimento uniforme em linha reta em relação a um sistema de referencial e percorrendo uma trajetória curva e acelerando com respeito a um outro sistema de referencial. Pode-­‐se mostrar que, se as leis de Newton são verificadas para um sistema de referencial, então elas são verificadas em um outro sistema de referencial que se mova com velocidade constante a ele relativa. Todos esses sistemas de referencial são chamados de Sistemas de Referencial Inerciais ou Sistemas de Referencial Newtonianos. Para qualquer observador, em um desses sistemas, a força exercida será a mesma. A terra não é exatamente um sistema inercial, porém para muitos fins práticos pode ser assim considerada, desde que os movimentos em observação não tenham grandes velocidades. FORÇAS FUNDAMENTAIS As forças fundamentais da natureza são: gravitacional, eletromagnética, interação forte e fraca. A partir delas outras forças são originadas, tais como as que estudaremos na aplicação de forças mecânicas. CLASSIFICAÇÃO DE FORÇAS Força Gravitacional Considerando dois corpos de massas m1 e m2 separados por uma distância r (figura 2). 1 SPIEGEL, MURRAY R., Mecânica Racional, Ed. MacGraw-­‐Hill, 1976, São Paulo. 4 FG FG m1 m2 r Figura 2: Força gravitacional entre duas massas. A força de interação gravitacional será 𝐅! = 𝐺
𝑚! . 𝑚!
𝐫 (7) 𝑟!
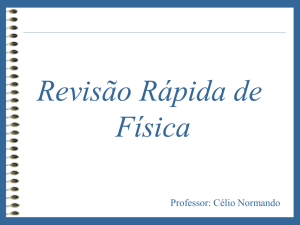
onde 𝐺 = 6,67 ×10!! 𝑁𝑚! /𝑘𝑔. Trata-­‐se de uma força apenas de atração entre dois corpos e que atua ao longo da distância que as separa. Força Peso Força gravitacional que atua num corpo próximo a superfície terrestre. Para um corpo de massa m a uma altura h da superfície (figura 3), a força gravitacional entre o corpo e a terra será m Z h P 𝐳! MT e rrestr
e
T
e
i
fíc
Super
R
T Figura 3: Força de um corpo de massa m. 5 𝐅! = 𝐺
𝑚𝑀!
−𝐳 (8) 𝑅!!
𝐏 = 𝐅! = 𝑚𝐠 (9) onde P é a foça peso e g é o vetor aceleração da gravidade 𝐠 = −𝐺
𝑀!
𝐳 ≅ −9,81𝐳 (10) 𝑅!!
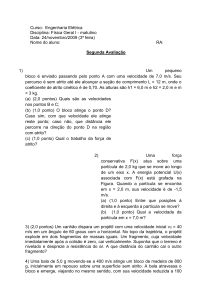
cujo módulo 𝑔 ≅ 9,81 𝑚 𝑠 ! (11) É importante que para o cálculo acima foi feita uma aproximação considerando a massa da terra homogênea e esférica. Força Normal Força de contato de um corpo com uma superfície que tem como característica ser perpendicular à superfície de deslocamento ou repouso do corpo. N N Figura 4: Força normal perpendicular à superfície. Como visto na figura 4, N é a força normal de contato. 6 Força de Atrito A força de atrito é a interação entre dois corpos, na maioria das vezes um deles é a superfície, que produz um força contrária ao movimento. A força de atrito tem as seguintes características: -­‐
-­‐
-­‐
-­‐
é proporcional à força normal, independe do tamanho da área de contato entre objeto e superfície, independe da aspereza da superfície, independe da velocidade do objeto. Essas afirmações são baseadas em observações obtidas de medidas empíricas. Por isso, é possível distinguir como ela atua em dois casos: quando o objeto está em repouso, em relação a superfície de apoio (força de atrito estático) e em movimento sobre a superfície (força de atrito cinético). Força de Atrito Cinético – considerando um corpo em movimento sobre uma superfície (figura 5), o módulo da força de atrito cinético, 𝑓! , é 𝑓! = 𝜇! 𝑁 (12) N v 𝑓! P=mg Figura 5: Força de atrito cinético entre um corpo e uma superfície. onde 𝜇! é o coeficiente de atrito cinético e N é o módulo da força normal. Em geral, o valor de 𝜇! está entre 0 e 1 (existem casos raros em que o valor extrapola a unidade). O caso de 𝜇! = 0, significa que não existe atrito, embora na prática esse resultado não é obtido com perfeição. 7 Força de Atrito Estático – Considerando a situação anterior, porém com o corpo parado. Neste caso, existirá uma força de atrito estático 𝑓! , oposta a uma força externa que tenta mover o bloco no sentido da velocidade. Logo, a força a de atrito máxima (𝑓!"á! ) será 𝑓!"á! = 𝜇! 𝑁 ≥ 𝑓! (13) onde 𝜇! é coeficiente de atrito estático, de modo que a força de atrito estático é maior que a força de atrito cinético. 𝜇! > 𝜇! (14) Força Elástica Força que atua numa mola elástica quando aplicada à um corpo. Conforme mostra a figura 6, para a situação (a), a mola está num estado de repouso, ligando um corpo a um ponto fixo (parede). Na situação (b), uma força externa (𝐅!"# ) distende a mola para a direita, de tal modo, que para uma situação de equilíbrio, uma força (𝐅) de sentido contrário, atua na mola. Enquanto que na situação (c), quando a mola é comprimida, com uma força externa (𝐅!"# ), a mola tende a se distender com uma força 𝐅 . A força 𝐅 obedece à lei de Hook, definida como 𝐅 = −𝑘𝑥! (15) onde k é a constante da mola e x a distensão (ou contração). O sinal negativo é o sentido da força, sempre contrário ao movimento, o que a qualifica como força restauradora. 8 𝑥 = 0 (a) 𝐅!"# 𝐅 (b) 𝐅 𝐅!"# (c) Figura 6: Força elástica atuando nula mola. EXERCÍCIOS RESOLVIDOS Antes de iniciarmos a resolução de problemas, apresentaremos algumas técnicas 2 que facilitam a realização de cálculos e a obtenção de soluções, envolvendo as leis de Newton. -­‐ Faça um esboço do problema, indicando força, velocidade, etc... -­‐ Anote as quantidades fornecidas. -­‐ Anote as equações úteis e o que precisa ser determinado. -­‐ A estratégia e os princípios de física deverão ser utilizados na manipulação das equações para se encontrar a quantidade buscada. Manipulações algébricas, bem como diferenciação ou integração são normalmente necessárias. Algumas vezes, os cálculos algébricos utilizando computadores constituem o método de avaliação mais fácil, senão o único. -­‐ Insira os valores reais para os nomes das variáveis consideradas de modo a determinar a quantidade buscada. 2 MARION, JERRY B., THORNTON, STEPHEN T., Dinâmica Clássica de Partículas e Sistemas, Ed. Cengage Learning, 2011, São Paulo. 9 1. Desprezando as massas da corda e da roldana, calcule a aceleração do conjunto de blocos que forma a máquina de Atwood, conforme figura abaixo. m1 m2 Solução Inicialmente, identifique as forças que atuam no sistema e o sentido do movimento. T1 m1 P1 m2 to T2 en
Sentido do Movim
P2 Onde 𝑇! e 𝑇! são as forças de tração na corda (sentido para fora do corpo) e 𝑃! e 𝑃! , são os módulos das forças pesos dos blocos 1 e 2, respectivamente. Em seguida, aplique a segunda lei de Newton, para cada bloco individualmente. Como a roldana está fixa, consideraremos as tensões iguais, ou seja 𝑇! = 𝑇! = 𝑇 10 logo, levando em conta o sentido do movimento e o fato do conjunto se deslocar com a mesma velocidade e aceleração, para cada bloco teremos 𝑇 − 𝑃! = 𝑚! . 𝑎 𝑃! − 𝑇 = 𝑚! . 𝑎 e resolvendo o sistema de equação, somando ambas ou substituindo o valor de T, teremos 𝑃! − 𝑃! = 𝑚! + 𝑚! . 𝑎 𝑎=𝑔
𝑚! − 𝑚!
𝑚! + 𝑚!
onde 𝑃! = 𝑚! . 𝑔 e 𝑃! = 𝑚! . 𝑔 2. Uma partícula de massa 𝑚 = 2 𝑘𝑔 move-­‐se ao longo de uma trajetória espacial definida por 𝐫 = 4𝑡 ! − 3𝑡 ! ! − 5𝑡! + (𝑡 ! − 2)𝐤. Ache pata 𝑡 = 1 𝑠. (a) o momento linear (b) a força atuante nela. Solução (a) Pela equação (4) na definição de momento linear 𝒑 = 𝑚𝐯 = 𝑚𝒓 𝒑 = 𝑚𝒓 = 2 8𝑡 − 3𝑡 ! ! − 5! + 4𝑡 ! 𝐤 para 𝑡 = 1𝑠 𝒑 = 2 8 − 3 ! − 5! + 4𝐤 𝒑 = 10! − 10! + 8𝐤 (b) Para o cálculo da força, usaremos a equação (6) 𝑭 = 𝒑 = 𝑚𝐯 = 𝑚𝒓 𝑭 = 2 8 − 6𝑡 ! − 0! + 12𝑡 ! 𝐤 para 𝑡 = 1𝑠 𝑭 = 2 8 − 6 ! − 0! + 12𝐤 𝑭 = 4! + 24𝐤 11 3. Uma partícula de massa m desliza sem rolar por um plano inclinado de um ângulo 𝛼 . Se ela parte do repouso no topo do plano inclinado e admitindo que o coeficiente do atrito entre a partícula e a superfície do plano seja 𝜇 . Ache (a) a aceleração (b) a velocidade num tempo t qualquer. (c) a distância percorrida após um intervalo de tempo t. Solução Os módulos das forças que atuam no sistema são N 𝑚𝑔
𝑚𝑔
𝑐𝑜
𝑠𝛼
Sen
𝑓! tid
𝑠𝑒𝑛
𝛼
o d
o M
ov
im
en
𝛼 to 𝛼 P (a) Aplicando a segunda lei de Newton, no sentido do movimento 𝑚𝑔𝑠𝑒𝑛𝛼 − 𝑓! = 𝑚𝑟 onde r é a distância percorrida a partir do topo. No sentido vertical do plano, a partícula está em equilíbrio 𝑁 = 𝑚𝑔𝑐𝑜𝑠𝛼 e a forca de atrito cinético 𝑓! = 𝜇𝑁 logo, substituindo as duas últimas equações na primeira 𝑚𝑔𝑠𝑒𝑛𝛼 − 𝜇𝑚𝑔𝑐𝑜𝑠𝛼 = 𝑚𝑟 𝑎 = 𝑟 = 𝑔(𝑠𝑒𝑛𝛼 − 𝜇𝑐𝑜𝑠𝛼) 12 (b) considerando o resultado anterior 𝑎 = 𝑣 = 𝑔(𝑠𝑒𝑛𝛼 − 𝜇𝑐𝑜𝑠𝛼) 𝑑𝑣
= 𝑔(𝑠𝑒𝑛𝛼 − 𝜇𝑐𝑜𝑠𝛼) 𝑑𝑡
como a partícula partiu do repouso, no topo do plano (𝑣! = 0) !
!
𝑑𝑣 =
!
𝑔(𝑠𝑒𝑛𝛼 − 𝜇𝑐𝑜𝑠𝛼)𝑑𝑡 !
𝑣 𝑡 = 𝑔(𝑠𝑒𝑛𝛼 − 𝜇𝑐𝑜𝑠𝛼)𝑡 (c) para o cálculo da distância a partir do topo 𝑣 𝑡 =
!
𝑑𝑟
𝑑𝑡
!
𝑑𝑟 =
!
𝑔(𝑠𝑒𝑛𝛼 − 𝜇𝑐𝑜𝑠𝛼)𝑡𝑑𝑡 !
𝑟 𝑡 =
𝑔
(𝑠𝑒𝑛𝛼 − 𝜇𝑐𝑜𝑠𝛼)𝑡 ! 2
4. A força atuante sobre uma partícula de massa m é dada, em termos do tempo t, por 𝐅 = 𝑎 𝑐𝑜𝑠 𝑤𝑡 ! + 𝑏 𝑠𝑒𝑛(𝑤𝑡)! Se a partícula está em repouso inicialmente na origem, ache sua (a) velocidade e (b) a posição em qualquer instante t. Solução (a) Foi visto que 𝐅=𝑚
𝑑𝐯
𝑑𝑡
𝑎 𝑐𝑜𝑠 𝑤𝑡 ! + 𝑏 𝑠𝑒𝑛 𝑤𝑡 ! = 𝑚
𝑑𝐯
𝑑𝑡
13 𝐯
𝟎
1
𝑑𝐯 =
𝑚
𝐯 𝑡 =
!
𝑎 𝑐𝑜𝑠 𝑤𝑡 ! + 𝑏 𝑠𝑒𝑛 𝑤𝑡 ! 𝑑𝑡 !
𝑎
𝑏
𝑠𝑒𝑛 𝑤𝑡 𝐢 +
(1 − 𝑐𝑜𝑠 𝑤𝑡 )! 𝑚𝑤
𝑤𝑚
(b) assim como, usando o conceito de velocidade instantânea. 𝐯 𝑡 =
𝑑𝐫
𝑑𝑡
considerando que a partícula partiu do repouso e da origem 𝐫
!
𝑑𝐫 𝑡 =
𝟎
𝐫 𝑡 =
!
𝑎
𝑏
𝑠𝑒𝑛 𝑤𝑡 𝐢 +
𝑐𝑜𝑠(𝑤𝑡) ! 𝑑𝑡 𝑚𝑤
𝑤𝑚
𝑎
𝑏
(1
−
𝑐𝑜𝑠
𝑤𝑡
)𝐢
+
(𝑤𝑡 − 𝑠𝑒𝑛 𝑤𝑡 )! 𝑚𝑤 !
𝑚𝑤 !
5. Uma partícula de massa m tem velocidade 𝑣 = 𝛼/𝑥 , onde x é seu deslocamento. Determine a força F(x) responsável pelo movimento. Solução Considerando que a velocidade é função da posição x, então a força também estará em função da posição. 𝐹 𝑥 = 𝑚𝑎(𝑥) 𝐹 𝑥 = 𝑚𝑣
𝑑𝑣
𝑑𝑥
substituído o valor de v, dado no problema 𝛼 𝑑 𝛼
𝑥 𝑥 𝑑𝑥
𝛼 𝛼
𝐹 𝑥 = −𝑚
𝑥 𝑥!
𝐹 𝑥 =𝑚
𝛼!
𝐹 𝑥 = −𝑚 ! 𝑥
14 EXERCÍCIOS 1. Considerando o plano inclinado abaixo (despreze o atrito). Construa o diagrama de forças (forças que atuam no sistema), indique o sentido do movimento, encontre a aceleração dos blocos e a tensão dos fios. m M 𝛽 !!!"#$%
!!!"#$
Resp. 𝑎 = 𝑔
e 𝑇 = 𝑀𝑚𝑔
!!!
!!!
2. Sob influência de um campo de força, uma partícula de massa m move-­‐se ao longo de uma trajetória elíptica 𝐫 = 𝑎 𝑐𝑜𝑠 𝑤𝑡 ! + 𝑏 𝑠𝑒𝑛 𝑤𝑡 ! se p é o momento linear, prove que: 𝐫 × 𝐩 = 𝑚𝑎𝑏𝑤 𝐤 3. A velocidade de uma partícula de massa m varia com a distância x conforme 𝑣 𝑥 = 𝛼𝑥 !! . Suponha que 𝑣 𝑥 = 0 = 0 em 𝑡 = 0. (a) Determine a força F(x) responsável pelo movimento. 𝐹 𝑥 = −𝑚𝑛𝑎 ! 𝑥 !(!!!!) (b) Determine 𝑥 𝑡 . 𝑥 = 𝑛 + 1 𝑎𝑡 ! (!!!) (c) Determine 𝐹 𝑡 . 𝐹 𝑡 = −𝑚𝑛𝑎! 𝑛 + 1 𝑎𝑡 ! !!!! /(!!!) 4. Um alpinista está subindo uma montanha, conforme figura abaixo, o coeficiente de atrito entre seus sapatos e a superfície vale 𝜇 = 0,2. Qual é o ângulo máximo de inclinação da montanha para o qual ele consegue subir? Resp. 𝜃 = 𝑎𝑟𝑐𝐶𝑜𝑡𝑎𝑛𝑔 0,2 𝜃 15 BIBLIOGRAFIA 1. TAYLOR, JOHN R., Mecânica Clássica, Ed. Bookman, 2013, Porto Alegre. 2. GIACOMETTI, JOSÉ ALBERTO, Mecânica Clássica – Uma Abordagem para Licenciatura, , Ed. LF, 2015, São Paulo. 3. NETO, JOÃO BARCELOS, Mecânica Newtoniana, Lagrangiana e Hamiltoniana, Ed. LF, 2013, São Paulo. 4. MARION, JERRY B., THORNTON, STEPHEN T., Dinâmica Clássica de Partículas e Sistemas, Ed. Cengage Learning, 2011, São Paulo. 5. SHAPIRO, ILYA L., PEIXOTO, GUILHERME B., Introdução à Mecânica Clássica, Ed. LF, 2010, São Paulo. 6. LUIZ, ADIR M., Física – Mecânica vol. I , Ed. LF, 2006, São Paulo. 7. SYMON, KEITH R., Mecânica, Ed. Campos, 1986, Rio de Janeiro. 8. SPIEGEL, MURRAY R., Mecânica Racional, Ed. MacGraw-­‐Hill, 1976, São Paulo. 16