Experimentos de Instrumentação Industrial
1o Experimento: Strain Gauge - Sensor de Deformação
Deformações e fadiga são geradas nas partes componentes, subsistemas e sistemas pelo peso,
temperatura, pressão, vibração ou forças de deslocamento. Um dos métodos mais usuais para
realizar estas medições é pelo uso de extensômetros metálicos, strain gauges, conectados em
ponte de Wheatstone.
O extensômetro baseia-se no princípio de que quando um condutor está sujeito a um esforço
de tensão ou compressão, ocorre uma variação de resistência. A amplitude da variação,
relacionada com a resistência original, é proporcional à intensidade do esforço aplicado, ou
ainda:
E = Esforço (máxima microdeformação) =
var iação do comprimento ∆L
=
comprimento original
L
Em aplicações de extensômetros utiliza-se uma constante de proporcionalidade conhecida
como Fator de Calibração (Gage Factor), que varia de 2 a 4 para as ligas mais usuais na
fabricação de extensômetros,. Este parâmetro é baseado na variação da resistência ocorrida no
extensômetro para sua resistência total relacionada com a variação no comprimento do
condutor para seu comprimento unitário, ou ainda:
GF =
∆R
∆L
R
L
A tensão de saída do amplificador
de um medidor de deformação,
com extensômetros em ponte de wheatstone é dada por:
eo = ∆R ∗ Vex ∗ G
R
onde Vex é a tensão de alimentação da ponte e G é o ganho do amplificador de
instrumentação.
Exemplo: Uma ponte de extensômetros com G=2 e ∆L =1500µE (dados provenientes de
L
catálogo do fabricante), possui ∆R = 2 ∗1500 = 3000 µ E .
R
Desta maneira, pode-se calcular a tensão de saida do medidor como sendo,
eo = 3000 ∗ Vex ∗ G .
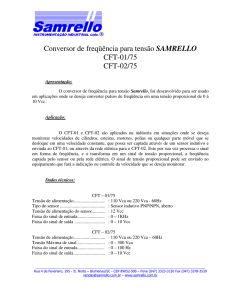
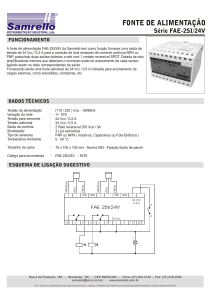
1. Estude o circuito eletrônico do módulo condicionador de sinais da balança de strain
gauges do LECI. Identifique neste circuito as partes principais, entendendo sua função:
Laboratório de Controle e Automação I – Experimentos de Instrumentação Industrial
Prof. Anísio Rogério Braga – DAAE/CEFET-MG, Prof. José Carlos Rodrigues – DELT-UFMG, Profa.
Carmela Maria Polito Braga – DELT-UFMG
1
regulador de tensão para Vex, amplificador de instrumentação, filtro RC passa baixas
(para filtrar o ruído de 60Hz) e o circuito de balanceamento da ponte.
2. Verifique a construção física da balança e a fixação dos strain gauges na mesma.
Analise os esforços possíveis sobre os mesmos.
3. Prepare a balança para iniciar o processo de calibração da mesma, ajustando os limites
da faixa operacional a ser assumida para esta balança (ou ainda, o ponto de zero e o
limite máximo da faixa admitida - fundo de escala).
ATENÇÃO: não utilize pesos muito elevados para não deformar a balança em excesso.
Limite sua escolha ao peso de 400g. Cuidado ao manusear os padrões secundários de peso
a serem utilizados na calibração. Eles não devem ser tocados com as mãos.
4. Levante 20 pontos para traçar, posteriormente, a curva de calibração da balança, sendo
10 pontos com variações crescentes e 10 com variações decrescentes.
5. Utilize o MatLab para fazer o ajuste de curva destes pontos, com o método dos
mínimos quadrados (ver anexo) ou utilizando alguma função do MatLab. Determine a
equação de calibração do medidor e as características de desempenho estático
possíveis.
6. Verifique, com osciloscópio, o efeito do ruído presente na medição e o efeito da
filtragem realizada.
7. Aplique um degrau de deformação (um "peteleco") na barrinha e observe/salve a saída
do medidor. Aplique outro teste para obter uma massa de dados para validação.
Encontre um modelo dinâmico para este sistema. Valide o modelo encontrado (cap. 3
Doebelin)
Comente as características estáticas e dinâmicas desta balança.
Módulo Condicionador para Células de Carga
VCC
0
Vc
12V
COMP
VEE
Fonte de Alimentação
R1
100
33nF
12V
0
VEE
+Vex
Vex=6V
10
C2
0
0 VEE
LM723
OUT
+
+
Vz
Vref
VCC
GND
U1
R5
20k
13
R4
560
R3
2.2k
Vcc+
12
5
9
6
7
R2
1k
33nF
CL
CS
-
Vcc-
2
3
4
11
VCC
Regulador de tensão para
a tensão de excitação do
circuito em ponte de
Wheatstone
C1
VCC
R7
560
R6
Balanço
100k
0
Balanceamento
C3
.1uF
7
0
1
8
3
U2
V+
-
-
GS1
GS2 +
+
OUT
6
REF
2
RG
10k
R=120
JP2
GND
V-
G=1+50k/RG
5
4
0
Vo
R8
15k
INA114AP
C5
.1uF
Célula de Carga
VIN(-)
VCC
Filtro
f0=100Hz
0
Vof
1
2
3
4
R2
R1
R3
R4
Strain-gages
C4
.1uF
0
Vo
0
VEE
VIN(+)
Amplificador de Instrumentação
Laboratório de Controle e Automação I – Experimentos de Instrumentação Industrial
Prof. Anísio Rogério Braga – DAAE/CEFET-MG, Prof. José Carlos Rodrigues – DELT-UFMG, Profa.
Carmela Maria Polito Braga – DELT-UFMG
2
2o Experimento: Medição de Temperatura
Temperatura, ao contrário de outras quantidades, é uma quantidade abstrata que precisa ser
definida em termos do comportamento dos materiais, submetidos à mudança de temperatura.
Nos experimentos propostos nesta seção estão incluídos sensores que utilizam mudança na
resistência (RTD - PT100, termistor), mudança na tensão de circuito aberto produzida por
efeito termo elétrico (termopar), mudança na queda de tensão de tensão em junção PN
semicondutora (-2,2mV/ 0C ).
Escalas de temperatura existentes para representar convenientemente o nível de atividade
termodinâmica associado com mudanças na temperatura:
•
•
•
Escala Fahrenheit (1715): 180 divisões (graus) entre o ponto de gelo (320 F) e o ponto
de ebulição (2120 F) da água.
Escala Celsius (1742): 100 divisões entre o ponto de gelo e o ponto de ebulição da
água. Posteriormente Linnaeus definiu o valor zero da escala como sendo o ponto de
congelamento de água. Inicialmente esta escala foi chamada de centígrada (referindo-se
às 100 divisões da escala), mas em 1948 foi modificada para Celsius, em homenagem a
Anders Celsius).
Escalas absolutas: Kelvin e Rankine, usadas para descrever temperaturas absolutas,
onde o valor zero á assumido ser igual ao mínimo termodinâmico. Elas são definidas
como:
θ k = Tc + 273,15
θ R = TF + 459,67
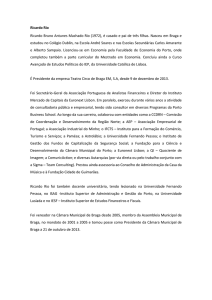
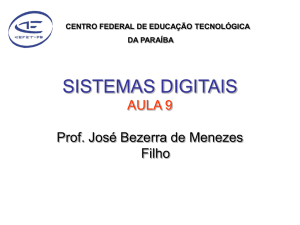
Termopares
Sensor simples constituído de dois materiais diferentes em contato térmico, chamado de
junção (Fig. 1). Pode ser feito de pares de fios trançados juntos, por meio de solda, ou por
meio da colocação de dois fios pressionados, com pressão suficiente para mantê-los juntos. A
operação deste sensor baseia-se na combinação de efeitos termoelétricos que produzem
pequenas tensões de circuito aberto, quando duas junções termopares são mantidas em
temperaturas diferentes. A tensão termoelétrica v0 é uma função não linear da temperatura,
que pode ser representada por uma equação empírica como sendo:
2
2
v0 = C1 (T1 − T2 ) + C 2 (T1 − T2 )
onde C1 e C2 são constantes termelétricas dependentes do material usado na junção e T1 e T2
são as temperaturas das junções.
-
J1, T1
Material
J2, T2
v
Material
Laboratório de Controle e Automação I – Experimentos de Instrumentação Industrial
Prof. Anísio Rogério
Braga
– DAAE/CEFET-MG,
Prof. José Carlos Rodrigues – DELT-UFMG, Profa.
Fig.
1: Termopar
com junção Dual
Carmela Maria Polito Braga – DELT-UFMG
3
A seleção do termopar (ou dos materiais que o constituem) é feita para :
• oferecer estabilidade de longo termo em níveis maiores de temperatura;
• garantir compatibilidade com a instrumentação disponível;
• minimizar custo;
• maximizar sensitividade sobre a faixa de operação ( µV /0C ).
.
Alguns tipos de termopares com faixa de medição são mostrados na tabela 1.
Tipo
E
Material Positivo
Cromel
Material Negativo
Constantan
J
Ferro
Constantan
K
Cromel
Alumel
R
Platina 13% Ródio
Platina
S
Platina 10% Ródio
Platina
T
Cobre
Constantan
Faixa de Medida
0
0 a 980 C
0
-185 a 400 C
0
-185 a 1260 C
0
0 a 1590 C
0
0 a 1535 C
0
-185 a 400 C
Tabela 1: Tipos de termopares
Termômetros de Resistência
Consistem de um elemento sensor que apresenta uma mudança na resistência com a mudança
da temperatura e um circuito condicionador para converter mudança de resistência para uma
tensão de saída. Existem dois tipos de sensores que são usualmente empregados: RTD's
(resistance temperature detectors) e termistores.
RTD's são elementos resistivos simples feitos de platina (PT 100 – bastante linear), níquel ou
liga de níquel-cobre (não lineares), que possuem coeficiente positivo de resistividade. Estes
materiais são estáveis e proporcionam uma resposta reproduzível para temperaturas sobre
longos períodos de tempo.
Termistores são fabricados de materiais semicondutores tais como óxido de manganês, níquel
ou cobalto. Estes materiais semicondutores possuem um coeficiente de resistividade altamente
negativo. Quando a aplicação requer uma exatidão muito elevada, silício dopado ou germânio
são utilizados como materiais para o termistor. Ver circuito em ponte da Fig. 1 para sensores
resistivos.
Sensores Precisos de Temperatura (Semicondutores)
LM135/LM235/LM335, LM135A/LM235A/LM335A
Precision Temperature Sensors
(http://www.national.com/ds/LM/LM135.pdf)
Laboratório de Controle e Automação I – Experimentos de Instrumentação Industrial
Prof. Anísio Rogério Braga – DAAE/CEFET-MG, Prof. José Carlos Rodrigues – DELT-UFMG, Profa.
Carmela Maria Polito Braga – DELT-UFMG
4
General Description
The LM135 series are precision, easily-calibrated, integrated circuit temperature sensors. Operating as a 2-terminal
zener,the LM135 has a breakdown voltage directly proportional to absolute temperature at +10 mV/°K. With less than
1Ω dynamic impedance the device operates over a current range of 400 µA to 5 mA with virtually no change in
performance. When calibrated at 25°C the LM135 has typically less than 1°C error over a 100°C temperature range.
Unlike other sensors the LM135 has a linear output. Applications for the LM135 include almost any type of
temperature sensing over a -55°C to +150°C temperature range. The low impedance and linear output make
interfacing to readout or control circuitry especially easy. The LM135 operates over a -55°C to +150°C temperature
range while the LM235 operates over a -40°C to +125°C temperature range. The LM335 operates from -40°C to
+100°C. The LM135/LM235/LM335 are available packaged in hermetic TO-46 transistor packages while the LM335
is also available in plastic TO-92 packages.
Features
•
•
•
•
•
•
•
•
Directly calibrated in °Kelvin
1°C initial accuracy available
Operates from 400 µA to 5 mA
Less than 1Ω dynamic impedance
Easily calibrated
Wide operating temperature range
200°C overrange
Low cost
3L TO 92, 4.80 x 4.80 x 3.80mm body size
LM 335
Connection Diagrams (TO-92 Plastic Package SO-8)
Bottom View - Order Number LM335Z - or LM335AZ
Temperature Accuracy (Note 1)
LM335, LM335A
Parameter Conditions LM335A LM335 Units
Min Typ Max Min Typ Max
Operating Output Voltage TC = 25°C, IR = 1 mA 2.95 2.98 3.01 2.92 2.98 3.04 V
Uncalibrated Temperature Error TC = 25°C, IR=1mA 1 3 2 6 °C
Uncalibrated Temperature Error TMIN ≤ TC ≤ TMAX, IR=1mA 2 5 4 9 °C
Temperature Error with 25°C TMIN ≤ TC ≤ TMAX, IR = 1 mA 0.5 1 1 2 °C
Laboratório de Controle e Automação I – Experimentos de Instrumentação Industrial
Prof. Anísio Rogério Braga – DAAE/CEFET-MG, Prof. José Carlos Rodrigues – DELT-UFMG, Profa.
Carmela Maria Polito Braga – DELT-UFMG
5
Calibration
Calibrated Error at Extended TC = TMAX (Intermittent) 2 2 °C
Temperatures
Non-Linearity IR = 1 mA 0.3 1.5 0.3 1.5 °C
Experimentos
1.
2.
3.
4.
Identifique os sensores disponíveis: termopar, PT-100, LM 335 (semicondutor).
Verifique o circuito eletrônico para condicionamento do sinal de cada sensor.
Obtenha o ganho, calibre e determine as demais características estáticas de cada sensor.
Obtenha a resposta dinâmica de cada um desses sensores. Para os que permitirem,
obtenha e compare a resposta dinâmica do elemento sensor sem invólucro de proteção
e com invólucro. Obtenha modelos matemáticos representativos deles e observe a
mudança introduzida pelo invólucro. Compare as dinâmicas dos sensores estudados.
Comente e proponha um método para compensar o atraso introduzido pelo invólucro.
5. Comente sobre as vantagens e desvantagens de cada sensor estudado.
VCC
5
9
6
Vc
COMP
Vcc-
R4
560
R1
100
C2
0
+Vex = 5V
13
R3
2.2k
10
OUT
+ +
Vz
Vref
7
R2
1k
CL
CS
-
Vcc+
LM723
2
3
4
C1 33nF
U1
11
12
Regulador de tensão para
a tensão de excitação do
circuito em ponte de
Wheatstone
R7
560
33nF
0
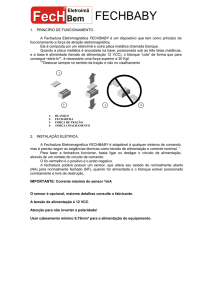
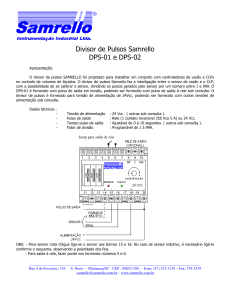
Exemplo: Um sensor resitivo de temperatura tipo RTD (e.g.
PT100) é usado para medir temperaturas de 0C a 100C.
Projete o circuito condicionador de sinal ao lado para
que seja minimizado o autoaquecimento do sensor.
Para minimizar o autoaquecimento do sensor devido a
dissipação de potência Joule projeta-se uma corrente
constante baixa, e.g. Io=500uA (Valores típicos de
corrente estão na faixa de 100uA a 1mA).
R1 = R2 = 5V/500uA
R1 = R2 = 10k
1%
Rz provê o ajuste de zero do circuito para uma
determinada temperatura. No caso do PT100, que
apresenta 100 Ohms a zero Celsius usa-se um resistor
de 56 Ohm em série com um potenciometro multivoltas de
100 Ohm.
RG provê o ajuste de ganho e consequentemente d efundo
de escala.
Sensor de Temperatura Resistivo
RG
Io = Vex/R
Io
R1
R2
50k
Io
R(T) é o sensor resitivo. Se R(0) = R e R(T)=R+r(T),
tem-se:
VEE
4
OUT
V-
3
+
+
Vo = Vex* [RG/R1]*[r(T)/R].
Ajustando-se RG para 20k, tem-se uma variação de
0.1V/1% de variação de R.
8
U3A
0
Para Rz = R, tem-se:
VCC
0
U3B
8
0
V+
OUT
5
7
Vo
1
V+
4
VEE
TL082
6
-
Vo = Vex* [RG/R1]*[r(T)+R-Rz]/Rz.
V-
TL082
2
-
Rz
R(T)
VCC
Anisio R. Braga, DAEE/CEFETMG, Sensor de temperature resistive, doc. GEACOPI20010701/01, julho 2002.
Fig 1: Circuito de medição em ponte para sensores resistivos
Laboratório de Controle e Automação I – Experimentos de Instrumentação Industrial
Prof. Anísio Rogério Braga – DAAE/CEFET-MG, Prof. José Carlos Rodrigues – DELT-UFMG, Profa.
Carmela Maria Polito Braga – DELT-UFMG
6