Manuel Vaz Guedes
O Motor de Indução Trifásico
modelização
Fa c ulda de de E nge nha ria da Univ e rs ida de do P ort o
1993
O Motor de Indução Trifásico
modelização
Manuel Vaz Guedes
(Prof. Associado Agregado)
Fa c ulda de de E nge nha ria
Univ e rs ida de do P ort o
O motor de indução trifásico é a máquina eléctrica de corrente alternada mais utilizada nos
sistemas de accionamento electromecânico. Devido às suas qualidades — robustez e simplicidade
de manutenção — tem vindo a substituir os motores eléctricos de colector de lâminas nas suas
aplicações típicas, e devido a um aumento do conhecimento do seu princípio de funcionamento
foi possível desenvolver novas estratégias de controlo que permitem uma boa adaptação da suas
características de funcionamento às necessidades da carga mecânica accionada.
Nas actuais condições de funcionamento, o estudo do motor de indução trifásico necessita de
utilizar um novo modelo, capaz de permitir a análise de condições de funcionamento como as
que são criadas pela alimentação do motor com conversores electrónicos de potência: uma
sucessão permanente de estados transitórios. O que não impede a continuação da aplicação do
Método Simbólico [MCB–1] na formulação desse modelo matemático.
ψs = Ls·is + M·ir
ψr = M·is + Lr·ir
dψs
us = Rs·is +
+ jω g ·ψs
dt
dψr
ur = 0 = Rr·ir +
+ j( ωg – ωr)·ψr
dt
T = k·Re(j ψ s ·i* s ) = k·(ψ s × is )
Fig. 1 – Modelização do motor de indução trifásico
O motor de indução trifásico é uma máquina eléctrica de corrente alternada, com o circuito
eléctrico de uma parte ligado a um sistema de alimentação trifásico, e com o circuito eléctrico da
outra parte submetido a fenómenos de indução magnética. Normalmente, o circuito eléctrico
© Manuel Vaz Guedes
Rascunho_1 9 9 3
O Motor de Indução Trifásico
—
R– 2
modelização
indutor encontra-se no estator da máquina, enquanto que o circuito induzido está no rotor da
máquina.
Na modelização do motor de indução trifásico têm sido utilizados todos os métodos de estudo das
máquinas eléctricas: Teoria Clássica, Teoria Generalizada e Método dos Fasores Espaciais. N o
entanto, atendendo a que se pode considerar, mesmo por aproximação, que as grandezas
eléctricas e magnéticas do motor de indução trifásico têm variação sinusoidal, são preferidos os
métodos de modelização baseados no Método Simbólico — representação de grandezas com
variação sinusoidal por quantidades complexas (fasores).
X
R
A aplicação da Teoria Clássica na modelização do motor de indução
trifásico permite através de considerações de natureza física [CCC–2],
[(1 – s) / s ]·R2
Ro
Xo
como a suposição de uma velocidade de rotação constante e da
alimentação do motor por um sistema trifásico e simétrico de tensões,
ou por uma analogia com o transformador eléctrico, desenvolver um circuito eléctrico
equivalente por fase. Desse circuito são deduzidas equações que permitem determinar as
grandezas características do funcionamento do motor como uma função dos parâmetros
eléctricos do circuito. O conjunto de suposições, em que se baseia a dedução do circuito eléctrico
equivalente, reduz muito o domínio de validade do modelo obtido, além de que o modelo obtido
só tem aplicação no estudo do regime permanente sinusoidal do motor de indução trifásico.
A Teoria Generalizada das Máquinas Eléctricas [JON–1] [CCC–3] permite construir um modelo
matemático, que traduzindo-se por um conjunto de equações diferenciais matriciais, tem uma
representação simples, uma dedução fundamentada em métodos físicos e matemáticos seguros, e
permite uma resolução numérica das equações fundamentais. Com este modelo é possível
estudar o regime permanente e o regime transitório de funcionamento do motor de indução
trifásico, mesmo o regime criado pela alimentação do motor com um conversor electrónico de
potência, [KRA–1].
T
{ψ} = [L]·{i}
regime
permanente
s
{u} = [R]·{i} + p{
T el = J·p
2
ψ}
θ + D·p
t
θ + T
r
regime
comportamento
transitório
dinâmico
O Método dos Fasores Especiais [STE–1] é um método de modelização de máquinas eléctricas que
apresenta algumas características interessantes: é, na actualidade, frequentemente aplicado na
análise do motor de indução trifásico [KOV–1] , o que já permitiu o desenvolvimento de novas
estratégias de controlo para esse motor; permite considerar grandezas com formas de onda de
distribuição não sinusoidal no espaço, resultantes da distribuição dos condutores eléctricos nas
ranhuras ou das irregularidades do entreferro da máquina; é um método simbólico, o que o
insere na melhor tradição do estudo das Máquinas Eléctricas na Faculdade de Engenharia da
Universidade do Porto, [MCB–1], [CCC–1], [CAS–1], [MVG–5] .
Em todos os modelos desenvolvidos para o motor de indução trifásico assumem especial
importância os parâmetros concentrados que caracterizam diferentes propriedades eléctricas,
magnéticas e mecânicas deste sistema electromecânico de conversão de energia, [MVG–3] . A sua
determinação, assim como os métodos adoptados na estimação desses parâmetros são, ainda
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
modelização
R– 3
hoje, motivo de investigação, apesar de muito já se encontrar normalizado, [IEEE–112] [JEC–37] .
Na modelização do motor de indução trifásico os aspectos construtivos (1.) do motor têm de ser
descritos para que se possam estabelecer as condições de estudo (2.) que restringem a validade do
modelo obtido. A modelização (3.) do motor pode, então, ser feita aplicando o Método dos Fasores
Espaciais na obtenção das equações fundamentais do motor. Com essas equações faz-se o estudo
do regime permanente sinusoidal (4.) , e compara-se as considerações efectuadas na obtenção do
modelo obtido com as considerações utilizadas na obtenção de outros modelos (5.) por outros
métodos, assim como as suas relações. Apresentam-se também os métodos de estimação dos
parâmetros (6.) do modelo obtido.
1.
Aspectos Construtivos do Motor de Indução Trifásico
O motor de indução trifásico é uma máquina eléctrica rotativa de corrente alternada,
assíncrona, cuja construção respeita o estabelecido nas normas, [CEI–34-1] e [MG–1], e é
condicionada pelos meios de produção do fabricante. Embora esta máquina eléctrica possa ser
construída para uma gama de potências muito ampla, neste estudo apenas se consideram
máquinas para potências superiores a 1 kW e inferiores a 100 kW; com alturas de eixo de 71 mm a
250 mm.
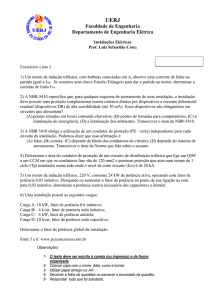
Fig. 2 – Aspectos construtivos de um Motor de Indução Trifási co
Um motor de indução trifásico tem as seguintes partes construtivas:
Es t a t o r
O estator do motor de indução trifásico é constituído por um
empacotamento de chapa de ferro magnético silicioso, com
baixa densidade de perdas magnéticas {por exemplo: s = 0,5 mm ; 3
W/kg a 1 T} que forma o circuito magnético estatórico. As chapas
têm uma forma de coroa circular ranhurada {por exemplo: 36 ou
48 ou 54 ranhuras } na periferia interior; estão revestidas de um
verniz isolante. As ranhuras são semifechadas, e destinam-se a
conter os condutores do circuito eléctrico estatórico. Entre
conjuntos de chapas magnéticas podem existir canais de
ventilação, que servirão para a passagem do ar de refrigeração.
O circuito eléctrico estatórico é formado por um enrolamento com três bobinas afastadas no
espaço de 2π/3 rad. elect. , e destinadas a serem alimentadas por cada uma das fases de um sistema
trifásico, [CCC–2]. Os condutores eléctricos que formam as diversas espiras das bobinas são
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
modelização
R– 4
isolados a esmalte, estão dispostos a duas camadas na ranhura, encontram-se isolados do
material magnético por um material isolante plástico, que forra a parte inferior da ranhura, e
estão travados na ranhura por regletes plásticas.
R o to r
O núcleo magnético rotórico é, também, folheado e construído com o mesmo
tipo de chapa magnética
utilizada no núcleo estatórico. As chapas
magnéticas têm uma forma de coroa circular que possui ranhuras fechadas
perto da periferia exterior. O número de ranhuras rotóricas {por exemplo: 34 }
está relacionado com o número de ranhuras estatóricas para evitar o
aparecimento de ruído no funcionamento do motor.
O enrolamento rotórico pode ser do tipo “gaiola de esquilo” ou pode ser bobinado. O enrolamento
rotórico em gaiola é constituído por uma gaiola de alumínio, dopado com uma pequena
percentagem de impurezas, que é obtida por injecção. Trata-se de um circuito eléctrico polifásico
em curtocircuito permanente, constiuído com um material com muito menor resistividade
{ρAl = 3,2·10–8 Ωm } do que o material ferromagnético em que está envolvido {ρFe = 100·10 –8 Ωm }; por
isso os condutores da gaiola não estão envolvidos por qualquer tipo de material isolante, (ver
Apêndice A).
Fig. 3 – Desenho esquemático dos anéis de um circuito rotórico em gaiola
Quando o circuito rotórico é em cobre as barras de cobre {ρCu = 1,72·10 –8 Ωm } são colocadas
manualmente nas ranhuras, e os anéis de topo são ligados às barras por soldadura a alta
frequência. As barras são travadas nas ranhuras para evitar vibrações durante o funcionamento
do motor de indução trifásico.
O circuito eléctrico de um motor de indução trifásico com rotor bobinado contacta com a parte
fixa da máquina através de um sistema colector de anéis–escovas. Desta forma é possível alterar o
valor dos parâmetros (resistência rotórica) durante o funcionamento da máquina.
Es t rutura M e c â nic a
O rotor da máquina é colocado,
a quente, no veio da máquina,
sendo
fabricado,
por
torneamento, em aço. O veio
apoia-se
em mancais
de
rolamento
colocados
nas
tampas da carcaça. O motor de
indução trifásico pode ser
construído para
funcionar
com o eixo em posição
horizontal, ou em posição vertical, ou inclinado.
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
modelização
R– 5
O motor de indução trifásico pode estar montado com patas, ou sobre flange.
A parte rotórica e a parte estatórica da máquina encontram-se protegidas do meio exterior por
uma carcaça, que pode ser de alumínio (com uma razoável percentagem de impurezas) injectado a
baixa ou a alta pressão, de ferro fundido ou em chapa de aço soldada.
Fig. 4 – Motor de indução trifásico com o rotor bobinado, carcaça em chapa de aço soldada
2.
Condições de Estudo
O motor de indução trifásico é uma máquina eléctrica demasiado complicada para poder ser
integralmente modelizada de uma forma acessível e cómoda. Por isso, estabelece-se um conjunto
de condições de estudo, simplificativas, que, eventualmente, poderão ser abandonadas, mediante
uma extensão do método de modelização matemática adoptado.
a
c'
b'
b
c
a'
Fig. 5 – Representação esquemática de um motor de indução trifásico
2. 1
H ip ó t e s e s d e Es t ud o
Atendendo aos aspectos construtivos do motor de indução trifásico considera-se que é
uma máquina eléctrica, com o entreferro completamente liso e mecanicamente
equilibrada. Os circuitos eléctricos do estator são equilibrados e iguais para cada uma
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
modelização
R– 6
das fases. O enrolamento do rotor é equilibrado e tem o mesmo número de pares de pólos
que o enrolamento estatórico.
Apesar desta máquina eléctrica ser construída com vários pares de pólos p, {por exemplo:
2 ou 4 ou 6 } o estudo da máquina é feito recorrendo à máquina eléctrica bipolar
equivalente, com o auxílio da transformação entre ângulos geométricos (θgeom) e
ângulos eléctricos (θel); θel = p·θgeom.
Apesar dos motores de indução trifásicos, essencialmente os de potência elevada,
trabalharem com uma tensão de alimentação com um valor de alta tensão, na gama da
média tensão, a maioria funciona na gama de tensão da redes de distribuição
domiciliária ou industrial (220/380 V). Considera-se, por isso, que a tensão não é
suficientemente elevada, pelo que a energia electromagnética armazenada no espaço da
máquina é magnética, desprezando-se a energia electrostática. Desprezam-se por isso,
no funcionamento normal, quaisquer efeitos de capacidades distribuídas entre os
enrolamentos, ou entre os enrolamentos e a massa metálica da estrutura da máquina.
O motor de indução trifásico, como qualquer máquina electromagnética, tem o seu
circuito magnético construído com materiais ferromagnéticos, que têm perdas
magnéticas. No entanto, considera-se que a curva de magnetização do material é
unívoca, isto é, o material ferromagnético não tem histerese magnética. Também se
considera que o circuito magnético está dimensionado de tal forma que nunca ocorre a
saturação do circuito. O seu ponto de funcionamento encontra-se na parte rectilínea da
característica de magnetização, o que implica que existe sempre uma relação constante
entre as correntes eléctricas e o fluxo magnético por elas criado. Note-se que esta
condição de estudo já não é imposta nos modernos estudos que envolvem a modelização
do motor de indução trifásico, [CAS–1] [VAS–1].
Surgindo nesta máquina grandezas eléctricas com frequência variável, principalmente
no rotor, considera-se que esta tem sempre um valor suficientemente baixo para
permitir que sejam desprezados todos os fenómenos de efeito pelicular e de efeito de
proximidade nos condutores eléctricos dos diferentes enrolamentos, assim como é
desprezada a presença de correntes de Foucault. Note-se que, também, esta condição de
estudo já não é imposta nos modernos estudos que envolvem a modelização do motor de
indução trifásico, [CAS–1] .
A força magnetomotriz indutora, criada pelo circuito eléctrico do estator, como o
entreferro é constante e pequeno, tem uma distribuição periódica no espaço do
entreferro com uma forma sinusoidal, que possui o seu valor máximo segundo o eixo
polar. Quando essa forma de onda espacial se apresenta distorcida, porque é periódica, é
decomponível em série de termos harmónicos, série de Fourier, e atendendo a que a
forma de onda é simétrica relativamente ao eixo polar, F(θ) = F(–θ), só existem termos
harmónicos em cosseno e de ordem ímpar. Como a amplitude de cada termo harmónico
diminui com o aumento da sua ordem, desprezam-se todos os termos além do
fundamental. Por isso, considera-se que a forma de onda da força magnetomotriz tem
uma variação sinusoidal no espaço, com o valor máximo segundo a direcção do eixo
polar. Não se considera o efeito dos harmónicos devidos à variação da relutância do
circuito magnético, provocada pelas ranhuras dos estator ou do rotor: os harmónicos de
ranhura.
Como se considerou que é linear a relação entre a força magnetomotriz e a indução
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 7
modelização
magnética, também é sinusoidal a variação espacial da indução magnética e do fluxo
magnético no entreferro da máquina. A força electromotriz que se induz no circuito
eléctrico rotórico da máquina tem uma variação sinusoidal no tempo.
O motor de indução trifásico, idealizado através das condições de estudo acima expostas, pode ser
representado por um conjunto de circuitos eléctricos, interligados magneticamente, que se
encontra representado na figura 6, como se poderá verificar através da concordância das
grandezas determinadas com auxílio deste modelo, utilizando os métodos matemáticos
subjacente ao Método dos Fasores Espaciais, e a sua actual contraparte.
b
a
c'
ωr
b'
1
a
2
b
c
3
a'
c
Fig. 6 – Esquema eléctrico de estudo para o motor de indução trifásico
O circuito eléctrico estatórico do motor síncrono trifásico é representado por três bobinas, (a,b,c),
colocadas no espaço segundo os três eixos de um sistema de referência (s), ou referencial,
complanares e afastados no espaço de 2π/3 rad elect . O circuito rotórico está referido a um
referencial (r) com três eixos complanares e afastados no espaço de 2π/3 rad elect . Este circuito
eléctrico rotórico é constituído por tês bobinas (1,2,3) em curtocircuito, representativas do
enrolamento em gaiola. O sistema eléctrico rotórico, conjuntamente com o referencial (r), rodam
com uma velocidade angular eléctrica ωr = dθr/dt = p·dθrgeom/dt.
q
Para este esquema electromecânico, representativo do motor síncrono trifásico,
estabelecem-se as seguintes convenções de sinal:
a
o sentido da corrente eléctrica numa bobina é o da corrente que entra na
bobina pelo condutor mais próximo do centro do esquema eléctrico;
b
uma corrente eléctrica de sentido positivo cria um fluxo magnético com
sentido positivo, isto é segundo o eixo da bobina e com o sentido radial
centrífugo indicado pela seta do eixo;
c
uma força electromotriz induzida tem sentido positivo quando, fechada
sobre uma resistência, faz circular uma corrente eléctrica com sentido
positivo, então e = – dψ/dt;
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
modelização
R– 8
d
os circuitos eléctricos do estator são considerados consumidores,
verificando--se, para os valores instantâneos das grandezas, que u = R·i – e;
e
os circuitos eléctricos do rotor são considerados consumidores, apesar de
estarem curtocircuitados nos terminais, verificando-se, para os valores
instantâneos das grandezas, que u = 0 = R·i – e;
f
o binário electromagnético é positivo quando a máquina eléctrica absorve
energia mecânica, com uma velocidade de sentido positivo, que é o sentido
directo ou trigonométrico, (gerador) .
A máquina de indução trifásica, funcionando como motor, apresenta-se como uma máquina
eléctrica simplesmente excitada. Para se estabelecerem as respectivas equações fundamentais,
que regem o seu funcionamento, é necessário definir os parâmetros característicos dos diversos
componentes eléctricos e mecânicos, [MVG–3] .
2. 2
P a râ m e t ro s
As diversas partes constituintes do motor de indução trifásico podem ser caracterizadas por
parâmetros eléctricos e por parâmetros mecânicos, [MVG–3] .
2. 2. 1
P a r â me t r o s
E lé c t r ic o s
Os diferentes circuitos eléctricos (ver Fig. 6) , ligados magneticamente, são caracterizados por
parâmetros. Esses parâmetros eléctricos são resistências e indutâncias, que devido às condições
de estudo estabelecidas para esta máquina são parâmetros concentrados, lineares e constantes.
As bobinas eléctricas do estator (indutor) da máquina, que são percorridas pela corrente eléctrica
de carga, apresentam uma resistência eléctrica que se considera constante, porque não se admite
a variação da temperatura durante o tempo de estudo do seu regime de funcionamento, e se
considera que não existe efeito pelicular ou de proximidade nos condutores. Devido às condições
de estudo, , considera-se que as resistências dos diferentes circuitos são iguais,
fl
Ra = Rb = Rc = Rs
(1)
Também os circuitos eléctricos rotóricos possuem uma resistência eléctrica, que, pelas condições
de estudo é representada por,
fl
R1 = R2 = R3 = Rr
(2)
Os coeficientes de auto-indução e de indução mútua dos circuitos eléctricos estatóricos e rotóricos
são determinados atendendo à distribuição da força magnetomotriz criada por cada bobina,
[CCC–3].
Considerando o enrolamento do estator, formado por três bobinas afastadas no espaço de 2π/3
rad elect , verifica-se que o circuito magnético percorrido pelo fluxo totalizado criado por
qualquer uma das bobinas é sempre o mesmo — o que se traduz por um relutância magnética R
constante — devido à simetria do circuito magnético e às suas propriedades magnéticas
lineares .
Admitindo que a distribuição espacial de força magnetomotriz é sinusoidal, ou que sendo
periódica, se pode representar apenas pelo termo fundamental da sua decomposição em série de
Fourier, [MVG–2], tomando como referência o eixo magnético que atravessa a bobina a, a
expressão para a respectiva força magnetomotriz é: fa (θ) = Fa ·cos(θ) = Ne·ia ·cos(θ), em que Ne é o
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 9
modelização
número efectivo de espiras da bobina a.
O fluxo médio por espira da bobina a é igual a φa = (Fa /R)·cos(θ) = (Ne·ia /R)·cos(θ) mais o fluxo de
fugas que apenas envolve a bobina a, φσ; como o ângulo α, entre o eixo da bobina e o eixo do fluxo
produzido pela bobina, é nulo (θ = 0), resulta que: φa = (Ne·ia /R) + φσ.
O fluxo totalizado ψa , que percorre o eixo magnético a, é constituído pelo contributo da boina a
para o fluxo comum (ou de magnetização ψam) e pelo fluxo totalizado de fugas ψσ,
ψa = Ne·φa = Ne·(Ne·ia /R) + ψσ.
A relação entre o fluxo totalizado ψa e a corrente eléctrica que o cria ia , é o coeficiente de
auto–indução da bobina a. Fazendo Laa = (Ne2 /R) e Lsσ = ψσ/ia (o que implica uma relação constante
entre o fluxo de fugas da bobina a e a corrente eléctrica que o cria ), obtém-se um valor constante nas
condições de estudo adoptadas,
fl
La = Laa + Lsσ = Lsm + Lsσ
(3)
Os coeficientes de auto-indução das outras bobinas podem obter-se da mesma forma:
Lb = Lbb + Lsσ = Lsm + Lsσ, e Lc = Lcc + Lsσ = Lsm + Lsσ. Devido à simetria dos diversos percursos
magnéticos e ao equilíbrio do estator ,
fl
La = Lb = Lc = Lss
(4)
b
1
ψab
ψa1
αr
ib
ψs
ψa
ia
a
a
a
i1
Fig. 7 – Distribuição do fluxo magnético totalizado
Considerando que apenas circula corrente eléctrica na bobina estatórica b, e que nas restantes
bobinas a corrente é nula, a relação entre o fluxo totalizado que atravessa a bobina a, ψab , e a
corrente eléctrica que circula na bobina b, ib, é o coeficiente de indução mútua Mab .
A força magnetomotriz criada pela bobina b e que atravessa a bobina a, é:
= Fb·cos(2π/3) = Ne·ib·cos(2π/3).
fab (θ) =
O fluxo totalizado ψab , devido à corrente eléctrica ib, que percorre o eixo magnético a, é
ψab = Ne·φab = Ne·(Ne·ib/R)·cos(2π/3) = (–1/2)·(Ne2 /R)·ib.
A relação entre o fluxo totalizado ψab e a corrente eléctrica que a cria ib, é o coeficiente de
indução mútua Mab = (–1/2)·(Ne2 /R). Trata-se, também, de um valor constante nas condições de
estudo adoptadas.
Devido à simetria do circuito magnético da máquina e das bobinas é:
fl
M ab = Mbc = Mca = Mba = Mcb = Mac = (–1/2)·Laa = (–1/2)·Lbb = (–1/2)·Lcc
e,
fl
M ab = Mbc = Mca = Mba = Mcb = Mac = Ms
© Manuel Vaz Guedes
1993
(5)
O Motor de Indução Trifásico
—
modelização
R– 10
Por um raciocínio análogo pode-se determinar o valor dos coeficientes de auto-indução e de
indução mútua do rotor.
A relação entre o fluxo totalizado ψ1 e a corrente eléctrica que a cria i1 , é o coeficiente de
auto–indução da bobina 1: Fazendo L11 = (Ner2 /R) e Lrσ = ψσ/i1 , obtém-se um valor constante nas
condições de estudo adoptadas,
fl
L1 = L11 + Lrσ = Lrm + Lrσ
(5)
Os coeficientes de auto-indução das outras bobinas rotóricas podem obter-se da mesma forma: Lb
= Lbb + Lrσ = Lrm + Lrσ, e Lc = Lcc + Lrσ = Lrm + Lrσ. Devido à simetria dos diversos percursos
magnéticos e ao equilíbrio do estator ,
fl
L1 = L2 = L3 = Lrr
(6)
A relação entre o fluxo totalizado ψ12 e a corrente eléctrica que a cria i2 , é o coeficiente de
indução mútua M12 = (–1/2)·(Ner2 /R). Trata-se, também, de um valor constante nas condições de
estudo adoptadas.
Devido à simetria do circuito magnético da máquina e do enrolamento rotórico é:
fl
M12 = M23 = M31 = M21 = M32 = M13 = (–1/2)·L11 = (–1/2)·L22 = (–1/2)·L33
(7)
e,
fl
M12 = M23 = M31 = M21 = M32 = M13 = Mr
Os coeficientes de indução mútua entre uma bobina de fase do rotor e uma bobina de fase do
estator têm uma variação sinusoidal com o ângulo θr entre as bobinas:
fl
Msr·cos(αr) = Mrs·cos(θr)
(8)
Os restantes coeficientes são obtidos atendendo à posição relativa das bobinas, afastadas de 2π/3
rad elect. : Msr·cos(θr), Msr·cos(θr + 2π/3), Msr·cos(θr + 4π/3)
Os parâmetros eléctricos do motor de indução trifásico são:
estator
Ra = Rb = Rc = Rs
La = Lb = Lc = Lss
M ab = Mbc = Mca = Mba = Mcb = Mac = Ms
Lss = Lsm + Lsσ
Ms = – Lsm /2
rotor
R1 = R2 = R3 = Rr
L1 = L2 = L3 = Lrr
M12 = M23 = M31 = M21 = M32 = M13 = Mr
Lrr = Lrm + Lrσ
Mr = – Lrm /2
estator–rotor
Msr·cos(θr), Msr·cos(θr + 2π/3), Msr·cos(θr + 4π/3)
2. 2. 2
P a r â me t r o s
(9)
Me c â n ic o s
Os parâmetros mecânicos característicos do motor de indução trifásico são o coeficiente de atrito
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
modelização
R– 11
D, e o momento de inércia J. Estes parâmetros são responsáveis, respectivamente, pelos binário
de atrito Ta, e pelo binário de inércia TJ.
TJ = J·(d2(θr/p)/dt2) = J·((1/p)·(dωr/dt))
Ta = D·(d(θr/p)/dt) = D·(ωr/p)
Em alguns estudos pode considerar-se que o coeficiente de atrito tem um valor que torna o
binário de atrito desprezável face ao binário de inércia da máquina (Ta « TJ ), ou ao binário de
inércia da máquina adicionado do binário de inércia da carga reduzido ao veio da máquina.
3.
Modelização
Considerando a complexidade de todos os aspectos construtivos, já apresentados em (1.) , é
extremamente difícil efectuar o estudo do motor de indução trifásico. Por isso, recorre-se a uma
representação do motor através da abstracção da realidade complexa que é um motor de indução
trifásico; isto é, constroi-se um modelo que representa essa realidade com uma aproximação
aceitável.
Atendendo à utilização a dar ao modelo do motor de indução trifásico, procura-se construir um
modelo descritivo, quantitativo e esquemático. O que se traduz pela construção de um modelo
matemático contínuo, que terá um domínio de validade bem definido.
A modelização do motor de indução trifásico é feita recorrendo a um Método Simbólico, como o
Método dos Fasores Espaciais, que é, actualmente, o mais indicado para a modelização de uma
máquina eléctrica alimentada por conversores electrónicos de potência.
3. 1
O M é t o d o d o s F a s o re s Es p a c ia is
A utilização de um Método Simbólico na modelização das máquinas eléctricas de corrente
alternada, [MCB–1], tem grandes vantagens. Por isso, foi um método de modelização que,
considerando a variação sinusoidal no tempo das grandezas eléctricas e magnéticas
fundamentais, teve grande aplicação na representação do motor de indução trifásico por um
circuito eléctrico equivalente por fase. No entanto, esse modelo permitiu, apenas, o estudo do
funcionamento do motor de indução trifásico em regime permanente.
Na actualidade, o motor
Motor de Indução
Lf
de indução trifásico é
alimentado
por
um
R
M
conversor
electrónico
S
3
de potência, o que
T
implica
que o seu
regime
de
√
funcionamento é uma
Rectificador
Inversor
sucessão permanente de
estados transitórios. Para efectuar o estudo do funcionamento do motor de indução trifásico
nesse regime peculiar, utiliza-se o Método dos Fasores Espaciais — representação por uma
quantidade complexa de uma grandeza física com variação sinusoidal no espaço, [STE–1].
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 12
modelização
Método dos Fasores Espaciais
No entreferro das máquinas eléctricas distribuem-se ondas de
grandezas eléctricas e magnéticas com desenvolvimento
sinusoidal no espaço. Quando o desenvolvimento dessas ondas
não é sinusoidal, é periódico, e pode ser representado por uma
série de termos harmónicos, [STE–1].
Im
α
αo
Re
Uma grandeza física, qualquer, f terá uma representação local no
espaço dada pela expressão f(α)= F·cos(α – αo), em que
0
• F é o valor da medida da grandeza
• (α – αo) é o ângulo de direcção ou, simplesmente, direcção.
Considerando que o entreferro da máquina eléctrica se encontra
num plano complexo de Gauss, em que o centro do referencial
Re–Im coincide com o eixo do veio da máquina, e os ângulos
são medidos em radianos (eléctricos), no sentido trigonométrico,
a expressão do valor local da grandeza em estudo pode ser
representada, recorrendo ao método simbólico, [MCB–1], por:
f(α) = Re[F cos(α – αo) + j F sen(α – αo)] =
f = F·exp(jαo)
r = 1·exp(jα )
= Re[F exp(j (α – α o)]
Im
= Re[F exp(j (αo)·exp(–j α )] = Re[ f r*(α)]
f
Desta forma, a grandeza f(α) é expressa pelo fasor espacial f ,
definido como: f = F·exp(jαo).
r
f ( α)
Trata-se da representação, sob a forma de um número complexo,
de uma grandeza física que tem um variação sinusoidal no
espaço.
Re
A medida do fasor f é proporcional à amplitude da grandeza local
f(α) e a sua posição no plano complexo coincide com a posição
espacial de qualquer máximo da grandeza.
Num motor de indução trifásico as diferentes bobinas (a, b, c) estatóricas são percorridas,
respectivamente, por correntes eléctricas de valor instantâneo: ia, ib, ic.
Como a bobina de cada fase tem um distribuição
sinusoidal no espaço, a distribuição (linear) da
corrente eléctrica, que circula em cada bobina,
tem uma distribuição sinusoidal (suposta
contínua ≡ banda de corrente) ao longo do espaço
do entreferro. Por isso, a corrente eléctrica de
cada bobina pode ser representada por um fasor
espacial num referencial ligado ao estator (s),
b
2π/3
a
4π/3
0
I sa = ia ·exp(j 0) = 1·ia
I sb = ib·exp(j 2π/3) = a·ib
I sc = ic·exp(j 4π/3) = a2 ·ic
em que o operador a = exp(j 2π/3).
c
Num determinado instante, e qualquer que seja
a variação no tempo da corrente eléctrica i(t), o
valor máximo positivo de uma dada corrente
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 13
modelização
eléctrica encontrar-se-á numa direcção do espaço complexo que coincide com a do respectivo
fasor espacial (I a ou I b ou I c).
A acção simultânea das três correntes eléctricas no circuito estatórico da máquina, sobrepõe-se,
atendendo a que não existe neutro acessível pelo que se verifica que ia + ib + ic = 0. O resultado
da acção das tês correntes é representado por um fasor espacial trifásico, ou simplesmente fasor
espacial, que se define como:
→
i = (2/3)·(I sa + I sb + I sc) = (2/3)·(ia + a·ib + a2·ic)
(10)
em que o factor (2/3) resulta da escolha do tipo de transformação linear entre o espaço real e o
espaço complexo, [MVG–5] .
O fasor espacial da corrente eléctrica i representa a direcção do eixo da distribuição sinusoidal
de corrente eléctrica no entreferro da máquina, [NAU–1] .
Na definição do fasor espacial das correntes
eléctricas está-se, simultaneamente, a construir uma
quantidade complexa — o fasor espacial — que é um
vector bidimensional num domínio complexo:
→
i = iD + j iQ
b
Im
Trata-se de uma transformação linear que permite
passar de um circuito com três bobinas afastadas no
espaço de 2π/3 rad elect para um circuito equivalente
com duas bobinas afastadas no espaço de π/2 rad
elect.
i
iQ
≡ {iD, iQ} T
ia
a2 ic
iD
a ≡ Re
a ib
c
O Método dos Fasores Espaciais também pode ser
aplicado, quando o referencial, ou sistema de eixos, está em movimento, ou solidário com o
rotor. Nesse caso, o fasor espacial trifásico desloca-se à velocidade do rotor ωr relativamente a
um sistema de eixos fixo, ou solidário com o estator, e ao qual os fasores das grandezas podem ser
referidos.
Considerando um sistema de eixos móvel ωm = dγ/dt, que faz, em cada instante, um ângulo γ(t)
com um sistema de eixos fixo, em que γ é um ângulo em avanço, o factor de transformação do
referencial fixo (f) para o referencial móvel (m) , é exp(–j γ), porque:
i f = i·exp(j α)
→
i m = i·exp(j (α– γ)) = i f·exp(–j γ )
i m = i f·exp(–j γ)
(11)
Note-se que a expressão (11) traduz, também, o factor de transformação entre dois quaisquer
referenciais animados de uma velocidade relativa, que é responsável pela existência de uma
ângulo γ, medido em avanço, entre os dois referenciais.
O tratamento desta expressão (11) terá de ser feito por um sistema digital, quando o seu valor é
necessário para a aplicação de uma estratégia de controlo ao motor de indução trifásico. Nessa
altura, atende-se a que:
i m = (iα + j iβ) = (ix + jiy)·exp(–j γ) = (ix + jiy)·(cos(γ) – jsen(γ))
iα = ix·cos(γ) + iy·sen(γ)
iβ = ix·(–sen(γ)) + iy·cos(γ)
ou
{iα, iβ}T = [C2]·{ix, iy}T
em que [C2 ] é a transformada eixos fixos–eixos móveis, quando se considera que o ângulo γ
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 14
modelização
entre os dois referenciais é medido em avanço, (ver Apêndice B ).
Este proceso computacional pode ser implementado em dois circuitos digitais correspondentes
aos blocos:
sen γ
sen γ
γ
Tri
ωm
1/p
iα
iβ
cos γ
cos γ
m
÷
f
ix
i
y
Fig. 8 – Blocos para a transformação entre referenciais
No estudo do motor de indução trifásico tem especial importância a utilização de um referencial
geral (g; x, y) , que roda a uma velocidade angular ωg, para além do referencial do estator (s; D, Q) e
o referencial do rotor (r; α, β) que roda a uma velocidade angular ωr. Desta forma, as grandezas da
máquina podem ser referidas a um único referencial solidário com o movimento de qualquer
parte da máquina, ou solidário com qualquer grandeza física.
r, β
g, y
ωg
s, Q
g, x
is
ωr
ir
r, α
αr
αs
θg
θr
s, D
Fig. 9 – Transformação para um referencial geral
Um fasor espacial referido a um referencial natural da máquina pode ser referido ao referencial
geral (g) através das expressões:
estator (s) ∅ geral (g)
i s = i·exp(j α s )
i sg= i·exp(j (α s – θg)) = i s·exp(–j θg)
→
i sg = i s ·exp(–j θ g )
(12)
rotor (r) ∅ geral (g)
i r = i·exp(j α r)
i rg = i·exp(j (α r– (θg–θr)) = i r·exp(–j (θg–θr))
→
i rg = i r ·exp(–j ( θ g –θ r ))
(13)
Quando um fasor espacial está referido a um sistema de eixos de referência, ou referencial geral
(g), pode concretizar-se esse referencial através da escolha da velocidade angular de rotação do
referencial ωg = dθ g/dt
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 15
modelização
Se ωg = 0, o referencial geral coincide com o referencial do estator;
se ωg = ωr, o referencial geral coincide com o referencial do rotor, e
se ωg = ωs, o referencial geral acompanha o campo girante (à velocidade angular de sincronismo).
A aplicação do Método dos Fasores Espaciais, e em particular o conceito de fasor espacial
trifásico, na modelização das máquinas eléctricas tem vantagens, que podem ser resumidas em
simplicidade de aplicação e na forma compacta que assumem as equações fundamentais para a
máquina eléctrica. Com o auxílio dos conceitos apresentados é possível caracterizar o motor de
indução trifásico por um conjunto de equações fasoriais, referidas a um referencial geral.
D
i s = (2/3)·(ia + a·ib + a2 ·ic)
(14)
D
i r = (2/3)·(i1 + a·i2 + a2 ·i3 )
(15)
3. 2
Eq u a ç õ e s F und a m e nt a is
A aplicação do Método dos Fasores Espaciais ao motor de indução trifásico, dentro das condições
de estudo estabelecidas em (2.), permite obter um conjunto de equações fasoriais que regem o
funcionamento
da máquina:
equações
magnéticas;
equações
eléctricas;
equação
electromecânica; e equação mecânica.
Atendendo à definição de fasor espacial trifásico adoptada (10) para as correntes eléctricas é
possível definir o fasor espacial das correntes eléctricas estatóricas e o fasor espacial das
correntes eléctricas rotóricas.
3. 2. 1
Equ ações
M a g n é t ic a s
As equações magnéticas do modelo do motor de indução trifásico estabelecem a relação entre os
fluxos totalizados que atravessam as diferentes bobinas e as correntes eléctricas que os criam.
No estabelecimento destas equações atende-se às propriedades magnéticas lineares do circuito
magnético e ao critério estabelecido para o sentido do fluxo criado por uma corrente eléctrica
que circula numa bobina. Também se continua a considerar que a ligação das diferentes bobinas
(em estrela ou em triângulo) não possui neutro acessível, pelo que se verifica que: ia + ib + ic = 0.
Para o fluxo totalizado criado pela bobina a, contribui o fluxo totalizado de auto-indução da
bobina a, Lsa·ia, mais o fluxo de indução mútua das bobina b e c.
ψsa = La· ia + Mab·ib + Mac· i c
•
ψsa = Lss·ia + Ms·ib + Ms·ic = Lss·ia + Ms·(ib + ic)
e da mesma forma para as outras bobinas estatóricas
•
ψsb = Lss·ib + Ms·ia + Ms·ic = Lss·ib + Ms·(ia + ic)
•
ψsc = Lss·ic + Ms·ia + Ms·ib = Lss·ic + Ms·(ia + ib)
Sabe-se (3) que o coeficiente de auto indução de uma bobina , La = Laa + Lsσ = Lsm + Lsσ, tem uma
componente devida ao fluxo magnético comum (ou de magnetização) e uma outra componente
devida ao fluxo de fugas ψσ. Por isso;
ψsa = Lss·ia + Ms·(ib + ic) = (Lsm + Lsσ)·ia + Ms·(–ia ) =
(Lsm + Lsσ – Ms)·ia
ψsb = Lss·ib + Ms·(ia + ic) = (Lsm + Lsσ)·ib + Ms·(–ib) =
(Lsm + Lsσ – Ms)·ib
ψsc = Lss·ic + Ms·(ia + ib) = (Lsm + Lsσ)·ic + Ms·(–ic) =
(Lsm + Lsσ – Ms)·ic
como a distribuição da força magnetomotriz é sinusoidal , sabe-se que:
© Manuel Vaz Guedes
1993
Ms = – Lsm /2.
O Motor de Indução Trifásico
—
modelização
R– 16
Substituindo na expressão anterior e fazendo Ls = Lsm + Lsσ + Lsm /2 = Lsσ + (3/2)·Lsm ; em que Ls
é o coeficiente de auto-indução total do enrolamento estatórico; que também contém o efeito da
indução mútua das diferentes bobinas estatóricas (o que é representado por (3/2)·L sm).
ψsa = Ls·ia
ψsb = Ls·ib
ψsc = Ls·ic
O fasor espacial trifásico do fluxo totalizado estatórico ψs obtém-se por sobreposição dos fluxos
magnéticos de cada bobina de acordo com a definição de fasor espacial trifásico (10).
D
ψss = (2/3)·(1·ψsa + a·ψsb + a2 ·ψsc)
(16)
e, tendendo à definição (14), i s = (2/3)·(1·ia + a·ib + a2 ·ic), de fasor espacial da corrente eléctrica
estatórica, é:
ψss = Ls·i s
Mas para o fluxo magnético que atravessa as bobinas estatóricas (a,b,c) também contribui o fluxo
de indução mútua criado pela corrente eléctrica que atravessa cada uma das bobinas rotóricas
(1,2,3) :
•
ψsar = Msrcos (θr)·i1 + Msrcos (θr + 2π/3)·i2 + Msrcos (θr + 4π/3)·i3
•
ψsbr = Msrcos (θr + 4π/3)·i1 + Msrcos (θr)·i2 + Msrcos (θr + 2π/3)·i3
•
ψscr = Msrcos (θr + 2π/3)·i1 + Msrcos (θr + 4π/3)·i2 + Msrcos (θr)·i3
A sobreposição destes três fluxos totalizados no entreferro da máquina eléctrica, permite
estabelecer o fasor espacial trifásico dos fluxos totalizados de indução que envolve as bobinas
estatóricas e é criado pelas correntes eléctricas rotóricas ψsr,
D
ψsr = (2/3)·(ψsar + a·ψsbr + a2 ·ψscr )
(17)
Substituindo as expressões para os fluxos totalizados de indução mútua de cada uma das bobinas
do estator, atendendo à definição do operador a = exp(j 2π/3), atendendo às operações de
potenciação do operador a (a –2 = a; a –1 = a 2 ; a 0 = 1), obtém-se:
ψsr = (2/3)·Msr· (i1 + a·i2 + a2 ·i3 )[cos (θr) + a·cos (θr + 2π/3) + a2 ·cos (θr + 4π/3)]
Atendendo à definição de fasor espacial trifásico das correntes rotóricas, obtém-se:
ψsr = Msr· i r·[cos (θr) + a·cos (θr + 2π/3) + a2 ·cos (θr + 4π/3)]
Procedendo a algumas simplificações envolvendo expressões trigonométricas, obtém-se:
D
ψsr = Msr· i r·[cos (θr) + (1/2)·cos (θr) + j(3/2)·sen(θr )] = (3/2)·Msr·i r·exp(j θ r)(18)
Devido à simetria do circuito magnético , e considerando que o número de espiras efectivas do
estator Nes é igual ao numero de espiras efectivas do rotor Ner, o fluxo magnético que atravessa
uma bobina e é criado pelas outras, quer sejam do estator quer sejam do rotor, constitui o fluxo
comum de magnetização, que terá uma constante de proporcionalidade comum relativamente às
correntes eléctricas que o criam — a indutância trifásica de magnetização M (= (3/2)·Msr). Como
a constante de proporcionalidade dos fluxos de indução mútua com as correntes que os criam é a
mesma em toda a máquina, ainda devido á simetria do circuito magnético e ao igual número
de espiras efectivo nsr = Nes/Nrs = 1, é: Msr = Lsm = Lrm . Senão, é Msr = Lsm /nsr = nsr·Lrm .
Na expressão fasorial do fluxo de indução mútua nas bobinas do estator (18) o termo i r·exp(j α r)
representa o fasor espacial trifásico da corrente eléctrica rotórica reduzido ao referencial do
estator (m ∅ f).
O fasor espacial trifásico do fluxo magnético estatórico ψs é:
N
ψs = ψss + ψsr = Ls·i s + M·i r ·exp(j θ r )
© Manuel Vaz Guedes
1993
(19)
O Motor de Indução Trifásico
—
R– 17
modelização
Continuando a considerar que as bobinas rotóricas não têm neutro acessível, e que i1 + i2 + i3 =
= 0, e que a distribuição da força magnetomotriz no espaço do entreferro é sinusoidal , a
determinação do fasor espacial do fluxo magnético rotórico segue um raciocínio análogo ao
utilizado na determinação do fasor espacial do fluxo estatórico.
D
ψrr = (2/3)·(1·ψr1 + a·ψr2 + a2 ·ψr3 ) = Lrr·i r
(20)
D
ψrs = (2/3)·(ψr1s + a·ψr2s + a2 ·ψr3s ) = (3/2)·Msr·i sexp(–j θr)
(21)
O fasor espacial trifásico do fluxo magnético rotórico ψr é:
N
ψr = ψrr + ψrs = Lr·i r + M·i s·exp(– j θ r )
(22)
Neste fasor está representado o contributo para o fluxo rotórico das bobinas rotóricas e o
contributo, reduzido ao referencial do rotor, das correntes eléctricas que passam nas bobinas
estatóricas.
Apesar de se pretender caracterizar o motor de indução trifásico pelas respectivas equações
fundamentais, as equações magnéticas obtidas (19) (22) não se encontram referidas a um mesmo
referencial o que não permite efectuar um estudo da máquina. Por isso serão reduzidas a um
referencial geral (g; x, y), que roda a uma velocidade instantânea ωg = dθg /dt (ver Fig. 9) .
Recorrendo à fórmulas (12) e (13), pode-se efectuar a redução ao referencial geral:
ψsg = ψs·exp(–j θg) = Ls·i s·exp(–j θg) + M·i r·exp(j θr)·exp(–j θg)
como i s·exp(–j θg) = i sg, e i r·exp(j θr)·exp(–j θg) = i r·exp(–j (θg–θr)) = i rg, é:
N
ψsg = Ls·i sg + M·i rg
(23)
A equação do fasor espacial trifásico do fluxo magnético rotórico ψr (22) também pode ser
reduzida ao mesmo referencial geral (g; x, y); de um forma análoga:
ψrg = ψs·exp(–j (θg–θr)) = Lr·i r·exp(–j (θg–θr)) + M·i s·exp(–j θr)·exp(–j (θg–θr))
como i r·exp(–j (θg–θr)) = i rg, e i s·exp(–j θr)·exp(–j (θg–θr)) = i s·exp(–j θg) = i sg, é:
N
ψrg = Lr·i rg + M·i sg
(24)
Desta forma, as equações magnéticas do motor reduzidas a um referencial geral são:
equações magnéticas
ψsg = Ls·i sg + M·i rg
ou
ψrg = Lr·i rg + M·i sg
ou
ψs = Ls·i s + M·i r
ψr = M·i s + Lr·i r
(25)
Como todas as equações fundamentais serão reduzidas ao referencial geral, pode-se suprimir o
índice g.
3. 2. 2
Equ ações
E lé c t r ic a s
Recorrendo a um conjunto de hipóteses simplificativas (2.1) foi possível representar o motor de
indução trifásico por um conjunto de circuitos eléctricos (bobinas) ligados pelo campo
magnético. Para esses circuitos eléctricos adoptaram-se critérios para os sinais das grandezas
eléctricas e magnéticas. Para cada circuito eléctrico, que representa uma bobina do motor de
indução trifásico, é possível escrever uma equação que traduz a aplicação da Lei de Kirchoff para
as tensões e a aplicação da Lei de Faraday da indução.
ua = Rs· ia – ea = Rs· ia + dψa /dt
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
modelização
R– 18
ub = Rs· ib – eb = Rs· ib + dψb/dt
uc = Rs· ic – ec = Rs· ic + dψc/dt
Considerando que o fasor espacial trifásico da tensão aplicada ao enrolamento estatórico é, us =
= (2/3)·(ua + a·ub + a2 ·uc), resulta que:
(2/3)·(ua + a·ub + a2 ·uc) = (2/3)·(ia + a·ib + a2 ·ic) ·Rs + d((2/3)·(ψa + a·ψb + a2 ·ψc) )/dt
o que corresponde à expressão fasorial,
N
us = Rs·i s + dψs/dt
(25)
Obtém-se, assim, a equação fasorial das tensões (equação eléctrica fasorial) para o enrolamento
trifásico estatórico referida ao sistema de eixos (referencial) do estator (s; D,Q), que constitui o
referencial natural do estator.
Considerando a representação do enrolamento rotórico por três bobinas afastadas no espaço de
2π/3 rad. elect. , a equação eléctrica fasorial rotórica pode ser obtida de uma forma análoga:
N
ur = Rr·i r + dψr/dt
(26)
Esta equação fasorial tem as suas grandezas referidas a um sistema de eixos (referencial) , que roda
a uma velocidade ωr = dθr/dt solidário com o rotor, (r; a,b); constitui o referencial natural das
grandezas rotóricas.
As equações (25) e (26) são as equações eléctricas do motor, expressas nos seus referenciais
naturais. Mas torna-se necessário reduzir todas as equações fundamentais do motor a um
mesmo referencial, para o que se escolheu um referencial geral (g; x,y).
Recorrendo às expressões (12) e (13) pode-se reduzir as equações (25) e (26) ao referencial geral.
us = Rs·i s + dψs/dt
usg·exp(jθg) = Rs·i s·exp(jθg) + d(ψsg·exp(jθg))/dt
Atendendo às regras da derivação de um produto de funções e à regra de derivação de um função
exponencial complexa ∅ d(exp(j α))/dt = j exp(j α)·(dα/dt), resulta:
usg·exp(jθg) = Rs·i sg·exp(jθg) + (dψsg/dt)·exp(jθg) + j exp(jθg)·(dθg/dt)·ψsg
N
usg = Rs·i sg + dψsg/dt + j ωg·ψsg
(27)
Nesta expressão (27) surgem, nitidamente, as duas componentes da força electromotriz:
•
a força electromotriz estática ∅ dψsg/dt, que resulta da variação no tempo do
fluxo magnético (ψsg) que envolve os condutores eléctricos das bobinas
fictícias do referencial g;
•
a força electromotriz dinâmica ∅ j ωg·ψsg, que resulta do movimento relativo
(ωg) entre os condutores das bobinas fictícias no referencial g e o fluxo
magnético totalizado estatórico reduzido a esse referencial ψsg.
Para a equação rotórica das tensões é:
urg·exp(j (θg–θr)) = Rr·i rg·exp(j (θg–θr)) + d(ψrg·exp(j (θg–θr)) )/dt
urg·exp(j (θg–θr)) = Rr·i rg·exp(j (θg–θr)) + (dψrg/dt)·exp(j (θg–θr)) )/dt + j exp(j (θg–θr))·(ωg–ωr)·ψrg
ou,
N
urg = Rr·i rg + dψrg/dt + j (ωg–ωr)·ψrg
Nesta expressão (28) também são nítidas as duas componentes da força electromotriz:
© Manuel Vaz Guedes
1993
(28)
O Motor de Indução Trifásico
•
—
R– 19
modelização
a força electromotriz estática ∅ dψrg/dt, que resulta da variação no tempo do
fluxo magnético (ψrg) que envolve os condutores eléctricos das bobinas
fictícias do referencial g;
•
a força electromotriz dinâmica ∅ j (ω g–ω r)·ψrg que resulta do movimento
relativo (ωg–ωr) entre os condutores das bobinas fictícias no referencial g e o
fluxo magnético totalizado rotórico reduzido a esse referencial ψrg.
As equações eléctricas do motor de indução trifásico reduzidas a um referencial geral são:
equações eléctricas
usg = Rs·i sg + dψsg/dt + j ωg·ψsg
ou
us = Rs·i s + dψs/dt + j ωg·ψs
urg = Rr·i rg + dψrg/dt + j (ωg–ωr)·ψrg
ou
ur = 0 = Rr·i r + dψr/dt + j (ωg–ωr)·ψr (29)
Como todas as equações fundamentais serão reduzidas ao referencial geral, pode-se suprimir o
índice g.
3. 2. 3
Equ ação
E le c t r o me c â n ic a
Na obtenção de uma expressão para o binário electromagnético que se desenvolve no motor de
indução trifásico utiliza-se o método, baseado no Princípio de Conservação da Energia, habitual
na dedução dessa expressão nos sistemas electromecânicos de conversão de energia, [MVG–3] .
Considerando a energia eléctrica absorvida pelo motor, retira-se a energia de perdas eléctricas e
das perdas magnéticas expressas sob a forma de perdas eléctricas, assim como a energia eléctrica
correspondente à energia armazenada no campo magnético. A energia eléctrica sobrante é
integralmente convertida em energia mecânica. Dessa energia uma pequena parte irá alimentar
as perdas mecânicas e a outra ficará disponível no veio da máquina.
Como todos estes fenómenos ocorrem no mesmo intervalo de tempo, substitui-se a representação
da energia pela potência respectiva.
A potência correspondente à energia eléctrica integralmente transformada permite determinar a
expressão do binário, em função de grandezas eléctricas e magnéticas: Ptr = ω·Tel. (Atendendo a que
a velocidade angular do rotor ω é a velocidade real expressa em radianos (geométricos) por segundo !…)
No funcionamento do motor de indução trifásico em regime permanente e alimentado por um
sistema trifásico simétrico, (1/3)·(ua + ub + uc ) = 0 e (1/3)·(ia + ib + ic ) = 0, a potência aparente
complexa absorvida pelo motor, exprime-se, em função dos fasores espaciais trifásicos da tensão
e da corrente, como
S = (3/2)·(us·i *s) = (3/2)·(Re(S ) + j Im(S )) = P + j Q
Nesta expressão da potência aparenta o factor (3/2) resulta da definição (10) adoptada para o
fasor espacial trifásico — trata-se de uma forma assimétrica e variante da potência.
A potência activa consumida pelo motor para alimentar as perdas e a transformação de energia
é:
P = (3/2)·Re(us·i *s)
(30)
A potência reactiva consumida pelo motor e necessária para criar o campo magnético é:
Q = (3/2)·Im(us·i *s)
(31)
Durante o funcionamento do motor num mesmo intervalo de tempo, o princípio da conservação
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
modelização
R– 20
da energia traduz-se por:
P = PJoule + Pmag + Ptr
ou
Ptr = P – PJoule – Pmag
Considera-se o modelo do motor de indução trifásico no referencial do estator s, porque é o
referencial natural para as grandezas de entrada. O modelo matemático para o motor resulta das
equações (29) fazendo ωg = 0.
equações eléctricas no referencial do estator (s; D,Q)
us = Rs·i s + dψs/dt
u’r = Rr·i ’r + dψ’r/dt – j ωr·ψ’r
A potência activa consumida na máquina é:
P = (3/2)·Re(us·i *s + u’r·i ’*r) =
P = (3/2)·Re[Rs·i s·i *s + (dψs/dt )·i *s + Rr·i ’r·i ’*r + (dψ’r/dt )·i ’*r – j ωr·ψ’r·i ’*r]
(32)
nesta expressão,
•
a potência de perdas PJoule no estator é representada por (3/2)·Re[Rs·i s·i *s] =
= (3/2)·(Rs·|i s|2 ) e no rotor (3/2)·Re[Rr·i ’r·i ’*r] = (3/2)·(Rr·|i ’r|2 ); nesta expressão
consideram-se representadas todas as perdas de energia eléctrica
máquina;
•
da
a potência correspondente à energia armazenada no campo magnético
obtém-se considerando que a máquina quando tem o rotor travado,
ωr = 0, apenas absorve energia para alimentar as perdas Joule e para ser
armazenada no campo magnético (≡ ensaio em vazio), por isso
Pmag = (3/2)·Re([dψs/dt )·i *s + (dψ’r/dt )·i ’*r ];
•
resta para a potência transformada
Ptr = (3/2)·Re[(– j ωr·ψ’r·i ’*r ] = (3/2)·ωr·Re[– j ψ’r·i ’*r ]
(33)
A potência eléctrica integralmente transformada em potência mecânica é dada por
Ptr = ωrm ·Tel = (ωr/p)·Tel
em que p é o número de pares de pólos da máquina; por isso
Tel = – p·(3/2)·Re[j ψ’r·i ’*r ] = – k·Re[j ψ’r·i ’*r ] = – k·(ψ’r x i ’r )
(34)
Como se verifica que ψ’r·i ’*r = ψr·i *r , resulta que
N
Tel = – k·Re[j ψ’r·i ’*r ] = – k·Re[j ψr·i* r ] = – k·(ψ r x i r )
ir
ß
ψr
(35)
Na expressão (35) o produto vectorial de dois fasores espaciais é tomado
no sentido definido em [MCB–1], onde o produto vectorial simbólico é
um complexo cuja parte real é: |a|·|b|·sen(/a,b ).
Verifica-se aqui uma das vantagens do Método dos Fasores Espaciais,
T el
que permite uma representação gráfica do binário. Atendendo à
expressão (35) o binário é proporcional ao módulo do fasor do fluxo |ψr|
e ao módulo do fasor da corrente eléctrica |i r| e ao seno do ângulo (ß) que no espaço formam entre
eles: T ∝ –k·|ψr|·|i r|·sen(ß). O módulo do binário é proporcional à área do paralelogramo
representado a sombreado na figura.
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 21
modelização
O sinal menos que afecta o binário indica que o sentido do binário electromagnético, observado
do referencial do estator, é contrário ao sentido da velocidade de rotação do rotor ωrm ·. Se em
lugar de se adoptar o referencial do estator tivesse sido adoptado o referencial do rotor na
dedução da expressão do binário electromagnético, verificava-se que o sentido do binário,
observado do referencial do rotor, era o mesmo que o sentido da velocidade de rotação ωrm ·
Partindo das equações (29) com ωg = ωr,
equações eléctricas no referencial do rotor (r; α,β)
u’s = Rs·i ’s + dψ’s/dt + j ωr·ψ’ s
ur = Rr·i r + dψr/dt
A potência activa consumida na máquina é:
P = (3/2)·Re(u’s·i ’*s + ur·i *r) =
P = (3/2)·Re[Rs·i ’s·i ’*s + (dψ’s/dt )·i ’*s + Rr·i r·i *r + (dψr/dt )·i *r + j ωr·ψ’s·i ’*s]
•
a expressão para a potência transformada é:
Ptr = (3/2)·Re[(j ωr·ψ’rsi ’*s] = (3/2)·ωr·Re[j ψ’s·i ’*s]
Como a potência eléctrica integralmente transformada em potência mecânica é dada por
Ptr = ωrm ·Tel = (ωr/p)·Tel
em que p é o número de pares de pólos da máquina; por isso
Tel = p·(3/2)·Re[j ψ’s·i ’*s] = k·Re[j ψ’s·i ’*s ] = k·(ψ’s x i ’s )
Como se verifica que ψ’s·i ’*s = ψs·i *s , resulta que
N
Tel = k·Re[j ψ’s·i ’*s ] = k·Re[j ψs·i *s] = k·(ψs x i s)
Neste caso, em que o referencial adoptado é o referencial natural do
rotor, o sentido do binário electromagnético, observado do
referencial do rotor, é o mesmo que o sentido da velocidade de
rotação do rotor ωrm ·
(36)
T el
is
ß
ψs
Esta convenção está de acordo com a convenção de sinal adoptada
para o binário (2.1) nas condições de estudo, [ADK–1] .
ESTATOR
ROTOR
Pm e c
Vista do estator a potência transformada em mecânica SAI ∅ é negativa
Vista do rotor a potência transformada em mecânica ENTRA ∅ é positiva
Num referencial geral (g; x,y) a expressão do binário electromagnético mantém-se
Tel = – k·Re[j ψr·i *r ] = – k·Re[j ψrg·exp(j θg)·i *rg·exp(j θg)]
N
Tel = – k·(ψrg·exp(j θg) x i rg·exp(j θg)) = – k·(ψrg x i rg)
(37)
o que confirma a expressão do binário como o produto vectorial dos dois fasores espaciais, que
depende do ângulo entre esses fasores e não da posição deles nos espaço. Neste caso (g) estarão
ambos apenas afastados de um ângulo θg da posição inicial (r) mantendo a sua posição relativa.
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 22
modelização
Também a expressão do binário referida ao sistema de eixos do rotor (r; α,β) pode ser reduzida ao
referencial geral (g; x,y)
N
Tel = k·Re[j ψs·i *s] = k·Re[j ψsg·exp(–j (θg–θr))·i *sg·exp(–j (θg–θr))] = k·(ψsg x i sg)
(38)
Desta forma verifica-se que:
o binário é
invariante numa mudança de referencial.
No estabelecimento de um modelo matemático para o motor de indução trifásico a equação
electromecânica que representa o binário electromagnético que actua sobre o rotor é:
equação electromagnética
Tel = k·(ψsg x i sg)
ou
Tel = k·(ψs x i s)
(39)
Como todas as equações fundamentais serão reduzidas ao referencial geral, pode-se suprimir o
índice g.
3. 2. 4
Equ ação
M e c â n ic a
O motor de indução trifásico tem uma parte móvel — o rotor — que é caracterizado por dois
parâmetros mecânicos concentrados (2.2.2) : o coeficiente de atrito D e o momento de inércia J.
No funcionamento do motor associado a uma carga mecânica, a equação dinâmica que rege o
sistema mecânico assim formado, que se desloca à velocidade do motor ωrm , é estabelecida em
obediência ao princípio de D’ Alembert —
para um corpo rígido animado de movimento de rotação em torno de um eixo, é
nula a soma algébrica dos binários aplicados e dos binários resistentes ao
movimento.
equação mecânica
Tel = Tcm + J·(dωrm /dt) + D·ωrm
(40)
em que Tcm é o binário requerido pela carga mecânica {N·m}, J é o momento de inércia {kg·m2 } ,
D é o coeficiente de atrito {N·m·s/rad} e ωrm é a velocidade angular (geométrica ≡ ωr/p) {rad/s}.
Nesta expressão o momento de inércia e o coeficiente de atrito podem resultar da redução de um
sistema mecânico complicado ao veio do rotor, [MVG–3] .
J
Tel
TJ
TD
D
T cm
Fig. 10 – Carga mecânica de um sistema electromecânico de indução
No estudo do funcionamento do motor de indução trifásico pode ser importante analisar o
comportamento do binário dinâmico: Td = Tel – Tcm .
Conforme as características do binário dinâmico, Td = Tel – Tcm , assim,
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
3. 2. 5
—
modelização
·
Td > 0 ∅ a carga mecânica acelera
·
Td = 0 ∅ a carga mecânica mantém uma velocidade constante
·
Td < 0 ∅ a carga mecânica desacelera
R– 23
S ín t e s e
O Método dos Fasores Espaciais permitiu obter para o motor de indução trifásico um modelo
matemático, no referencial geral (g, x,y), constituído pelas equações:
ψs = Ls·is + M·ir
ψr = M·is + Lr·ir
dψs
us = Rs·is +
+ jω g ·ψs
dt
dψr
ur = 0 = Rr·ir +
+ j( ωg – ωr)·ψr
dt
T = k·Re(j ψ s ·i* s ) = k·(ψ s × is )
4.
(41)
Um Modelo com Valores Reduzidos
No estudo dos motores eléctricos de indução os valores reduzidos das grandezas facilitam o
cálculo e o controlo dos resultados. A importância desta forma de representação das grandezas
do motor de indução trifásico traduz-se pela utilização frequente deste modo de representação
das grandezas nos estudos sobre este motor eléctrico e na normalização que já esteve estabelecida
sobre este assunto, [IEEE–86].
Considera-se que uma grandeza está representada em valores reduzidos “por unidade” (p.u.)
quando é representada por um número resultante da divisão do seu valor actual pelo valor da
grandeza de base, quando as duas quantidades estão expressas na mesma unidade.
Como uma máquina eléctrica é uma unidade que promove uma transformação de energia que
envolve grandezas eléctricas e mecânicas, é necessário que os dois sistemas de unidades estejam
ligados de uma forma coerente para que os valores reduzidos das grandezas sejam significativos,
[BAR–1].
Para uma máquina assíncrona, como o motor de indução trifásico definem-se, quando expressas
num sistema de unidades coerente, as seguintes grandezas de referência ou de base,
•
potência aparente de base — é a potência aparente total nominal à tensão e à
corrente nominal.
quando se está a estabelecer um modelo do motor de indução trifásico com as grandezas
reduzidas, mas com os valores base retirados de um catálogo, convém atender que a
informação da potência do motor se refere à potência mecânica nominal, e que em
regime nominal o motor tem um determinado rendimento e um determinado factor de
potência; Pe = Pmec ·(1/η)·(1/cos ϕ) = Pb = (3/2)·Uns·In.
•
tensão de base — é a amplitude da tensão nominal por fase (tensão simples) ;
•
corrente de base — é a amplitude da corrente nos condutores da fase
correspondente à potência de base e à tensão de base com o factor de potência
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 24
modelização
unitário: O valor da corrente de base é igual ao valor da potência base por fase
a dividir pelo valor da tensão de base;
•
impedância base — é o valor da divisão da tensão base pela corrente base;
•
a pulsação base — é a pulsação de sincronismo ω = 2·π·f;
•
velocidade angular base — é a velocidade angular mecânica de sincronismo,
ωb = ωs = ω/p;
•
fluxo totalizado de base — é dado por ψb = Ub/ω.
•
binário base — é dado pelo cociente da potência de base pela velocidade
angular de base Tb = Pb/ωb = Pb·p/ω;
•
tempo base — é dado por tb = 1/ω (segundo) .
Frequentemente utilizam-se na definição dos valores de base das grandezas alternadas
sinusoidais os valores máximos das grandezas, para uma ligação dos enrolamentos em estrela,
(essas grandezas, normalmente, são expressas em valores eficazes), Ub =
2 ·Uns, Ib =
2 ·In.
Atendendo a que a tensão de base e a corrente de base estão expressas em valores máximos a
expressão da potência de base Pb = 3·Uns·In = 3·(Ub/ 2 )·(Ib/ 2 ) = (3/2)·Ub·Ib.
Desta forma existem vários valores de base que são derivados dos valores de base estabelecidos
para a máquina.
as correntes eléctricas são: ix (p.u.) = ix/( 2 ·In),
iy (p.u.) = iy/( 2 ·In)
as tensões eléctricas são: ux (p.u.) = ux/( 2 ·Uns),
uy (p.u.) = uy/( 2 ·Uns)
as resistências eléctricas são: rs (p.u.) = Rs/Zn = Rs·In/Uns
a potência eléctrica (activa, reactiva, ou aparente) : pe (p.u.) = Pe/Pb = Pe/((3/2)·Ub·Ib);
O binário em valores reduzidos é dado por te (p.u.) = Te/Tb.
Atendendo à redução do valor do tempo, τ = t/tb = ω·tb.
As reduções apresentadas referem-se aos circuitos eléctricos do estator. Para os circuitos
eléctricos rotóricos atende-se a outras considerações.
Se a razão das forças electromotrizes estatórica e rotórica é m = Es/Er, então a tensão base do
rotor é Usb/m, e a corrente base do rotor é Irb = m·Ib.
Estabelecida a forma de proceder à redução das grandezas eléctricas e magnéticas, é necessário
analisar o modo como se procede para efectuar a redução das grandezas mecânicas.
Neste tipo de estudo é costume introduzir-se a constante de energia cinética H, que representa a
razão entre a energia mecânica armazenada à velocidade nominal e a potência aparente da
máquina, isto é: H = ((1/2)·J·(ω2/p2))/Pb = ((1/2)·J·(ωrm 2))/Pb = ((1/2)·J·(ωrm ))/Tb, {segundo} .
Existem outros sistemas reduzidos que partem de outras grandezas base. No entanto este tipo de
modelo para o motor de indução trifásico só tem utilização em estudos de estabilidade do
funcionamento do motor, ou para facilitar a apresentação dos resultados de um trabalho de
investigação envolvendo várias máquinas eléctricas, [CAS–1] .
5.
Funcionamento em Regime Permanente Sinusoidal Simétrico
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 25
modelização
O desenvolvimento da Electrotecnia provocou a utilização de sistemas que alteram
completamente as características de funcionamento previstas para as redes eléctricas.
Actualmente, são pouco frequentes as situações em que um motor de indução trifásico é
alimentado por um sistema trifásico simétrico de tensões sinusoidais.
A existência de vastas redes de distribuição e a sua deficiente exploração contribuem para que o
sistema da tensão de alimentação seja, frequentemente, desequilibrado. A utilização de
conversores electrónicos de potência, com o seu funcionamento baseado em elementos
semicondutores em comutação, contribui para que as tensões de alimentação sejam não
sinusoidais.
Apesar desta realidade, ainda hoje o estudo do motor de indução trifásico se limita à análise do
comportamento do motor em regime permanente sinusoidal simétrico, [CCC–2] [SAY–1] [LAN–1].
Com a aplicação do Método dos Fasores Espaciais obteve-se um modelo matemático para o motor
de indução trifásico que permite o estudo desta máquina eléctrica em qualquer regime de
funcionamento. Torna-se, portanto, necessário verificar a possibilidade de utilização do modelo
matemático obtido, equação (41), no estudo do funcionamento do motor de indução trifásico em
regime permanente sinusoidal simétrico.
5. 1
Co m p o rta m e nt o d a s Gra nd e z a s
No estudo das grandezas alternadas com variação sinusoidal no tempo [MVG–1] verificou-se que
uma grandeza cujo valor instantâneo é um função sinusoidal do tempo g(t) =
2 ·G·cos(ωt+ϕ) podia
ser representada por um fasor temporal, ou simplesmente fasor, G = 2 ·G·exp(j ϕ).
Desta forma,
g(t) =
2 ·G·cos(ωt+ϕ)
g(t) = Re[G·exp(j ωt)] = Re[g]
mas a parte real de uma grandeza complexa pode ser expressa por Re[A ] = (1/2)·(A + A *),
g(t) =
2 ·G·cos(ωt+ϕ) = Re[ 2 ·G·exp(j ϕ)·exp(j ωt)] = (1/2)·(g + g*)
Aplicando estas expressões a um sistema trifásico simétrico directo de correntes eléctricas, e
considerando a = exp(2π/3), (a2 )* = a e a* = a2, e i =
2 ·I·exp(j ϕ)·exp(j ωt) = I ·exp(j ωt)
fase a
ia (t) =
2 ·I·cos(ωt+ϕ) = (1/2)·(i + i *)
fase b
ib(t) =
2 ·I·cos(ωt+ϕ–(2π/3)) = (1/2)·(a2 ·i + a·i *)
fase c
ic(t) =
2 ·I·cos(ωt+ϕ–(4π/3)) = (1/2)·(a·i + a2 ·i *)
O fasor espacial trifásico das correntes eléctricas (10) para este sistema é:
i s = (2/3)·(ia + a·ib + a2 ·ic) = (2/3)·(1/2)·[(i + i *) + a·(a2 ·i + a·i *) + a·2(a·i + a2 ·i *)
atendendo a que a3 = 1, e a4 = a,
i s = (2/3)·(1/2)·[(i + i *) + a·(a2 ·i + a·i *) + a·2(a·i + a2 ·i *)]
i s = (2/3)·(1/2)·[(3·i + (i *·(1 + a + a2 ))]
como 1 + a + a2 = 0,
is = i =
2 ·I·exp(j ϕ)·exp(j ωt) = I ·exp(j ωt)
(42)
O fasor espacial trifásico de um sistema trifásico simétrico directo de correntes eléctricas
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 26
modelização
sinusoidais colocadas no espaço segundo um sistema de eixos complanos e afastados de 2π/3
radianos, é igual ao fasor temporal instantâneo da corrente eléctrica i na fase de referência (a).
Im
√2
x
·I·e
p(j
ϕ)
Re
Também se confirma o teorema de Ferraris, [MVG–1] , para os
campos girantes porque, o fasor espacial trifásico é igual ao
fasor temporal quando este está animado de um movimento
de rotação no espaço com uma velocidade angular igual à
pulsação das correntes eléctricas ω (velocidade de sincronismo)
deslocando-se no sentido positivo dos ângulos;
i s = i = I ·exp(j ωt).
Nesta situação o lugar geométrico das posições ocupados no
tempo pelo fasor espacial trifásico é uma circunferência de
raio igual a
2 ·I·exp(j ϕ).
Nesta situação particular — sistema trifásico simétrico de grandezas sinusoidais — as grandezas
têm simultaneamente um variação sinusoidal no espaço e no tempo, e são representadas por uma
quantidade complexa que é simultaneamente um fasor espacial e um fasor temporal: é um
bicomplexo [MCB–1; p. 17] {bifasor}.
Bicomplexos
Em 1947 o Professor Manuel Corrêa de Barros no seu trabalho “Método Simbólico para Estudo das
Máquinas de Corrente Alternada” apresentava a noção de grandeza com variação sinusoidal no espaço
representada por um vector {fasor espacial}, de grandeza com variação sinusoidal no tempo representada por
um complexo {fasor}, e a reunião destas duas noções numa só, capaz de representar um vector plano, que
roda ao mesmo tempo que a sua medida algébrica {medida} varia entre os limites +A e –A, [MCB–1].
a = A·exp(j ϕi)·exp(j θj)
O bicomplexo fica caracterizado pela amplitude (A), pela fase (ϕi) e pela direcção (θj). A representação dos
bicomplexos é feita por letras com um traço superior e outro inferior; a letra será maiúscula se forem
constantes a direcção e a fase e será minúscula se uma destas grandezas, pelo menos, for variável.
Tanto a fase como a direcção são, normalmente, funções lineares do tempo,
a = A·exp(j (ωt + ϕi))·exp(j (ωrt + θj)) = A ·exp(j (ω + ω r)·t)
pl
an
o
co
m
pl
ex
t = t1
o
a
plano real
ϕj
θi
Para estas novas entidades matemáticas — os bicomplexos — existe um conjunto de propriedades
(conjugados; igualdade; equivalência) e de operações (algébricas e vectoriais) e de operadores. Neste trabalho
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
modelização
R– 27
foram aplicadas todas essas novas noções ao estudo do motor de indução trifásico em regime permanente.
No estudo dos sistemas trifásicos os enrolamentos das diferentes fases podem estar ligados em
estrela ou em triângulo.
Quando os enrolamentos estão ligados em estrela pode estabelecer-se um relação entre o fasor
espacial trifásico das tensões simples us e o fasor espacial trifásico das tensões compostas uc.
1
U 12
O fasor espacial das tensões simples define-se como:
us = (2/3)·(u1 + a·u2 + a2 ·u3). A expressão da tensão composta
resulta da diferença entre duas tensões simples: u12 = u1 – u2 ,
u23 = u2– u3 , u31 = u3– u1 . O fasor espacial trifásico das tensões
U1
compostas tem por expressão, atendendo à posição relativa no
espaço do fasores das tensões compostas,
2
uc = (2/3)·(u23 + a·u31 + a2 ·u12)
3
uc = (2/3)·((u2 + a·u3 + a2 ·u1) – (u3 + a·u1 + a2 ·u2)
uc = (2/3)·(a2 ·(u1+ a·u2 + a2 ·u3) – a·(u1 + a·u2 + a2 ·u3) = (2/3)·(u1+ a·u2 + a2 ·u3) ·(a2 – a)
uc = (a2 – a)·us
Como (a2 – a) = ((–1/2)–(j 3 /2) –( (–1/2)+(j 3 /2) ) = –j 3
uc = (–j 3 )·us
(43)
Verifica-se, assim, que o fasor espacial trifásico das tensões compostas tem uma medida 3
maior do que o fasor espacial trifásico das tensões simples, e que o fasor espacial trifásico das
tensões compostas está afastado de π/2 radianos em atraso do fasor espacial trifásico das tensões
simples.
Nesta ligação em triângulo o fasor espacial das correntes eléctricas nas linhas i L coincide com o
fasor espacial das correntes eléctricas nas fases i F.
Quando os enrolamentos estão ligados em triângulo pode estabelecer-se um relação entre o fasor
espacial trifásico das correntes nas linhas i L e o fasor espacial trifásico das correntes nas fases
i F.
1
O fasor
espacial
das
correntes
nas
linhas
define-se
como:
i L = (2/3)·(i1 + a·i2 + a2 ·i3 ). A expressão das correntes nas linhas resulta da
diferença entre duas correntes nas fases que convergem no nó de entrada
i1 = i12 – i31, i2 = i23 – i12, i3 = i31 – i23. O fasor espacial trifásico das
2
correntes nas linhas tem por expressão, atendendo a esta definição,
3
i F = (2/3)·(i23 + a·i31 + a2 ·i12)
i L = (2/3)·((i12+ a·i23+ a2 ·i31) – (i31+ a·i12+ a2 ·i23)
i L = (2/3)·(a·((i23 + a·i31 + a2 ·i12) – a2 ·((i23 + a·i31 + a2 ·i12)
iL =
(2/3)·(i23 + a·i31 + a2 ·i12) (a – a2 ) = (a – a2 )·i F
Como (a – a2 ) = ((–1/2)+(j 3 /2) –( (–1/2)–(j 3 /2) ) = j 3
i L = (j 3 )·i F
(44)
Verifica-se, assim, que o fasor espacial trifásico das correntes eléctricas nas linhas tem uma
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 28
modelização
medida 3 maior do que o fasor espacial trifásico das correntes eléctricas nas fases, e que o fasor
espacial trifásico das correntes eléctricas nas linhas está afastado de π/2 radianos em avanço do
fasor espacial trifásico das das correntes eléctricas nas fases.
Considerando um sistema trifásico simétrico de tensões e correntes sinusoidais, a potência
activa instantânea do sistema é a soma das potências instantâneas de cada fase,
p = ua·ia + ub·ib + uc·ic
em que ua , ub, uc, e ia, ib, ic, são as tensões simples e as correntes nas fases do sistema.
Como o fasor espacial trifásico das tensões é u = (2/3)·(ua + a·ub+ a2 ·uc) e o fasor espacial trifásico
das correntes eléctricas é i = (2/3)·(ia + a·ib+ a2 ·ic), e se considera o sistema simétrico,
ua + ub + uc = 0, ia + ib + ic = 0, resulta que a expressão da potência instantânea é
p = (3/2)·Re(u·i *)
(45)
Trata-se da expressão simbólica para a potência activa de um sistema trifásico de tensões e
correntes eléctricas sinusoidais e simétricas,
P = (3/2)·Re(U·I *)
a expressão da potência reactiva é,
Q = (3/2)·Im(U·I *)
e a expressão da potência aparente é
S = (3/2)·(U·I *)
em que U e I são os valores máximos das grandezas alternadas sinusoidais, representadas pelos
seus respectivos fasores.
5. 2
Eq u a ç õ e s F und a m e nt a is
Im
ωs
y
As equações fundamentais do motor de indução trifásico em regime permanente sinusoidal
podem ser derivadas das equações fundamentais (41) no referencial geral (g; x,y). Para isso há que
definir esse referencial, dando um valor a ωg.
ωs
b
R
2
e
x
ωg = 0
ωg = ωr
1
a
ωg
=
ωs
√
c
3
Fig. 11 – Referencial rotativo síncrono, solidário com o campo girante
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 29
modelização
O referencial adoptado é o referencial rotativo síncrono, que roda à velocidade de sincronismo
da máquina ωg = ωs = 2πf/p que, quando é expressa em radianos eléctricos p·(2πf/p), é
numericamente igual à pulsação das grandezas alternadas ω = 2πf, e que em regime permanente
está solidário com a onda girante de campo magnético. Assim θg = ω·t.
Neste referencial o fasor espacial das grandezas trifásicas sinusoidais e simétricas de um motor
de indução trifásico com construção simétrica e equilibrada tem um comportamento especial: é
uma quantidade constante.
Considerando que o motor de indução trifásico tem o circuito estatórico alimentado por um
sistema trifásico de tensões simétricas, um sistema directo, o respectivo fasor espacial trifásico
coincide com o fasor temporal instantâneo da tensão (42).
ua (t) =
2 ·Us·cos(ωt+ϕ)
ub(t) =
2 ·Us·cos(ωt+ϕ–(2π/3)) uc(t) =
2 ·Us·cos(ωt+ϕ–(4π/3))
e
us = u =
2 ·Us·exp(j ϕ)·exp(j ωt) = Us·exp(j ωt)
(46)
O fasor espacial trifásico das tensões estatóricas representado no referencial rotativo síncrono,
ou referencial do campo, é, através de (11), usg, e é igual ao fasor temporal da tensão de
alimentação, Us =
2 ·Us·exp(j ϕ),
usg = u·exp(–jωt) =
2 ·Us·exp(j ϕ)·exp(j ωt))·exp(–j ωt) = Us
(47)
É uma quantidade constante no tempo, porque sendo (46) um fasor temporal Us que roda com
uma velocidade angular igual a ω, o que está expresso na actuação como operador do fasor
unitário exp(j ωt), é visto no referencial rotativo síncrono como um fasor estacionário.
No motor de indução trifásico não existe uma relação constante entre a frequência das grandezas
eléctricas de alimentação e a velocidade de rotação do rotor da máquina — é uma máquina
eléctrica assíncrona. Tal é caracterizado pelo deslizamento s; grandeza que dá uma informação
sobre a razão entre a diferença de velocidade de sincronismo e a velocidade do rotor
relativamente à velocidade de sincronismo: s = (ωs – ωr)/ωs.
Como a velocidade relativa entre o campo magnético girante e os condutores do rotor é
responsável pela indução de forças electromotrizes nos condutores do rotor, a frequência dessas
forças electromotrizes induzidas e das grandezas que dela resultam (correntes, força magnetomotriz,
campo de reacção do induzido) têm uma pulsação igual a s·ωs, como resulta de
(ωs – ωr) = s·ωs; ou (ωs – ωr) = s·ω, porque ωs ≡ ω.
As tensões aplicadas ao circuito rotórico, que no caso do motor de rotor em curto-circuito são
todas nulas são:
u1 (t) =
2 ·Ur·cos(sωt+φ)
u2 (t) =
2 ·Ur·cos(sωt+φ–(2π/3)) u3 (t) =
2 ·Ur·cos(sωt+φ–(4π/3))
e
ur = u’ =
2 ·Ur·exp(j φ)·exp(j sωt) = Ur·exp(j sωt)
(48)
O fasor espacial trifásico das tensões rotóricas representado no referencial rotativo síncrono, ou
referencial do campo, é, através de (13), urg, e é igual ao fasor temporal da tensão rotórica,
Ur =
2 ·Ur·exp(j φ),
urg = u’·exp(–j (ωs – ωr)t) =
2 ·Ur·exp(j φ)·exp(j sωt))·exp(–j sωt) = Ur
(49)
O estudo feito para o fasor espacial da tensão, reduzido ao referencial rotativo síncrono, pode ser
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 30
modelização
repetido para correntes eléctricas, estatóricas i sg = I s e rotóricas
totalizados, estatóricos ψsg = Ψ s e rotóricos ψrg = Ψ r.
i rg = I r e para os fluxos
Assim todas as grandezas trifásicas sinusoidais simétricas são constantes quando estão
reduzidas ao referencial rotativo síncrono.
Como o fluxo totalizado estatórico e rotórico, expresso no referencial rotativo síncrono, não
varia com o tempo ( Ψ s =
tempo é nula.
2 ·Ψs·exp(j λ) ; Ψ r =
2 ·Ψr·exp(j λ’)), a sua derivada total em ordem ao
As equações eléctricas do motor de indução trifásico em regime permanente sinusoidal simétrico
são:
equações eléctricas
~
usg = Rs·i sg + j ωg·ψsg
ou
~
urg = Rr·i rg + j (ωg–ωr)·ψrg
ou
U s = Rs·I s + j ω·Ψs
U r = 0 = Rr·I r + j (sω)·Ψ r
(50)
A relação linear entre os fluxos magnéticos totalizados e as correntes eléctricas que os criam é
estabelecida através das equações magnéticas (25).
ψsg = Ls·i sg + M·i rg
ψrg = Lr·i rg + M·i sg
ou
ψs = Ls·i s + M·i r
ou
ψr = M·i s + Lr·i r
No regime de funcionamento permanente sinusoidal simétrico, em que o fasor espacial trifásico
de uma grandeza coincide com o fasor temporal instantâneo, as equações magnéticas assumem a
forma seguinte:
equações magnéticas
~
ψsg = Ls·i sg + M·i rg
ou
Ψ s = Ls·I s + M·I r
~
ψrg = Lr·i rg + M·i sg
ou
Ψ r = M·I s + Lr·I r
(51)
A equação electromecânica pode ser obtida directamente da equação electromecânica expressa
em fasores espaciais num referencial geral (39), que agora está concretizado, ou pode ser obtida
por uma análise energética que forneça o valor o binário em termos da amplitude dos fasores
temporais instantâneos. Na primeira situação,
equação electromagnética
~
Tel = k·(ψsg x i sg)
ou
Tel = k·(Ψ s x I s)
(52)
No regime permanente o sistema está em equilíbrio, por isso não há armazenamentos ou
libertações de energia contida na máquina, [MVG–3] . Assim, quando o motor está a funcionar em
regime permanente sinusoidal simétrico não existe variação da energia mecânica armazenada
nas massas em movimento de rotação ((1/2)·J·(dθ/dt)2 = 0). A equação mecânica é:
equação mecânica
~
© Manuel Vaz Guedes
Tel = Tcm
(53)
1993
O Motor de Indução Trifásico
—
modelização
R– 31
Em síntese, as equações características do funcionamento do motor de indução trifásico em
regime permanente sinusoidal simétrico, estabelecidas num referencial que roda com a
velocidade de sincronismo, são:
Ψ s = Ls·Is + M·Ir
Ψ r = M·Is + Lr·Ir
~
U s = Rs·Is + jω·Ψ s
U r = 0 = Rr·Ir + j(sω)·Ψr
T = k·Re(j Ψ s ·I* s ) = k·(Ψ s × I s )
(54)
Deste conjunto de equações simbólicas pode-se retirar as equações de funcionamento do motor
de indução trifásico em regime permanente sinusoidal simétrico.
U s = Rs·Is + jω·Ls·Is + jω·M·Ir
~
5. 3
U r = 0 = Rr·Ir + j(sω)·M·Is + j(sω)·Lr·Ir
(55)
M o d e lo R e d uz id o a o Es t a t o r
Frequentemente o estudo em regime permanente do motor de indução trifásico tem de ser feito
considerando que todos os elementos da máquina estão referidos a uma das suas partes
constituintes: — ao estator, porque é a parte que está em contacto directo com o sistema de
alimentação em energia eléctrica do motor.
Na situação de funcionamento em regime permanente sinusoidal simétrico o motor de indução
trifásico, devido ao seu princípio de funcionamento, o fluxo magnético comum aos dois
enrolamentos induz uma força electromotriz nas Nes espiras efectivas do enrolamento
estatórico que é dada por |Es| = ke·Nes·f·ψm ; e nas Ner espiras efectivas do enrolamento rotórico o
fluxo magnético comum induz uma força electromotriz com o valor s·|Er| = ke·Ner·sf·ψm . Entre
as duas forças electromotrizes induzidas existe uma relação dada pela razão entre o número
efectivo de espiras: |Es|/|Er| = ke·Nes·f·ψm /ke·Ner·f·ψm = Nes/Ner = nsr.
O valor desta razão |Es|/|Er| = nsr pode ser obtido laboratorialmente nos motores de indução
trifásicos com o rotor bobinado através do ensaio com o rotor travado e em circuito aberto,
[CCC–2].
A transformação dos elementos e grandezas características do circuito eléctrico rotórico para o
estator da máquina tem de ser feita de uma forma em que não exista variação das consequências
no funcionamento da máquina eléctrica da existência daquelas quantidades:
¨
têm de se manter os feitos magnéticos do enrolamento rotórico — esta
condição impõe que a força magnetomotriz criada pela corrente eléctrica
rotórica reduzida ao estator Nes·I’s seja a mesma que a força magnetomotriz
resultante da passagem da corrente rotórica nas espiras rotóricas Ner·Ir;
Nes·I’s = Ner·Ir ⇒
≠
I’s = (Ner/Nes)·Ir = (1/nsr)·Ir
(56)
não podem provocar alteração das potências em jogo — por isso a potência
dissipada em perdas Joule, ou a potência correspondente à energia
armazenada no campo magnético nos dois circuitos, têm de ser as mesmas;
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
R– 32
modelização
Rr· Ir2 = R’r· I’r2
PJ ⇒
Pmag
—
Lr· Ir2 = Lr· I’r2
⇒
R’r = Rr· (Ir2/I’r2 ) = Rr ·nsr2
(57)
L’r = Lr ·(Ir2/I’r2 ) = Lr ·nsr2
(58)
Ficam, assim, deduzidas as regras de equivalência dos elementos e das grandezas do circuito
rotórico para o circuito estatórico do motor de indução trifásico.
Tensão
GRANDEZA
rotor ∅
estator
nsr·
Corrente
Resistência
Indutância
(1/nsr)·
nsr2·
nsr2·
Os diferentes parâmetros eléctricos do circuito rotórico são a resistência Rr e indutância Lr e a
componente da indutância mútua M. As grandezas eléctricas são a tensão rotórica Ur e a corrente
eléctrica rotórica I r, e a grandeza magnética é o fluxo magnético totalizado Ψ r.
A indutância rotórica, que é responsável pela criação de um fluxo magnético totalizado em cada
fase, tem uma componente correspondente ao fluxo de fugas e outra correspondente ao fluxo
magnético comum às duas partes das máquina. Como se considerou que é linear o circuito
magnético , os coeficientes de auto-indução são proporcionais ao quadrado do número
efectivo de espiras {Lsσ ∝ Nes2 ; Lrσ ∝ Ner2 }, e os coeficientes de indução mútua são proporcionais
ao produto do número efectivo de espiras de cada enrolamento {Lrm ∝ (Nes·Ner); Msr ∝ (Nes·Ner)}.
Lr = Lrσ + (3/2)·Lrm
⇒ L’r = nsr2 ·Lrσ + nsr2 ·(3/2)·Lrm = L’rσ + nsr2 ·(3/2)·(Lsm /nrs2 )
L’r = L’rσ + Mm
(59)
como M = (3/2)·Msr, é Mm = nsr2 ·(3/2)·Lrm = (3/2)·Lsm = nsr·(3/2)·Msr = nsr·M.
A indutância estatórica também tem a parte correspondente ao fluxo magnético totalizado
comum reduzida.
Ls = Lsσ + (3/2)·Lsm
⇒ Ls = Lsσ + Mm
(60)
A resistência rotórica reduzida é:
R’r = nsr2 ·Rr
(61)
As grandezas eléctricas reduzidas ao enrolamento estatórico são:
U’r = nsr·Ur
;
I ’r = (1/nsr)·I r
;
Ψ ’r = nsr·Ψ r
(62)
O modelo matemático (fasorial) do motor de indução trifásico reduzido ao estator, em regime
permanente sinusoidal simétrico, é constituído pelas equações magnéticas, eléctricas e
electromecânica:
Ψ s = Lσs·Is + Mm ·(Is + I’r)
~
Ψ’r = Mm ·(I s + I’r ) + L’σr ·I’r
sr
U s = Rs·Is + jω·Ψ s
U’r = 0 = Rr·I’r + j( sω)·Ψ’r
T = k·Re(j Ψ s ·I* s ) = k·(Ψ s × I s )
Considerando apenas a expressão geral das equações eléctricas,
~
sr
© Manuel Vaz Guedes
U s = Rs·Is + jω·Lσs·Is + jω·M m ·(Is + I’r)
U’r = 0 = Rr·I’r + j( sω)·L’σr·I’r + j( sω)·M m ·(Is + I’r)
1993
(63)
O Motor de Indução Trifásico
—
R– 33
modelização
ou, considerando a reactância de fugas estatórica Xσs e a reactância de fugas rotórica reduzida ao
estator X’σr, assim como a reactância de magnetização reduzida ao estator Xm = ω·Mm ,
~
sr
U s = Rs·Is + jX σs·Is + jX m ·(Is + I’r)
U’r = 0 = Rr·I’r + js·X’σr·I’r + js·X m ·(Is + I’r)
(64)
A forma da equação eléctrica rotórica pode ser alterada por uma simples operação algébrica,
(multiplicação por 1/s) quando se considera que o circuito rotórico está em curto-circuito,
~
sr
U s = Rs·Is + jX σs·Is + jX m ·(Is + I’r)
0 = (Rr/s)·I’r + jX’ σr·I’r + jX m ·(Is + I’r)
(65)
Estas equações (65) correspondem às equações obtidas através da aplicação da Teoria Clássica ao
estudo do motor de indução trifásico [CCC–2; (2.29)], mas, na realidade, são apenas um caso
particular de um sistema de equações (41) que rege o funcionamento do motor de indução
trifásico em qualquer regime de funcionamento.
5. 4
Es q ue m a Elé c t ric o Eq uiv a le nt e
No estudo efectuado considerou-se, sempre, que o motor de indução trifásico era uma máquina
simétrica e perfeitamente equilibrada pelo que os circuitos das três fases eram iguais . Assim,
as equações (65) traduzem o que se passa no circuito eléctrico de uma fase.
Às equações (65) pode, também, associar-se um circuito eléctrico. As equações eléctricas do motor
de indução resultariam, assim, da aplicação das Leis de Kirchoff a esse circuito. Surge, desta
forma, associado às equações eléctricas um circuito eléctrico equivalente por fase do
motor de indução trifásico.
Cada um das equações eléctricas representa uma malha desse circuito. Na malha correspondente
à equação eléctrica estatórica existe uma tensão aplicada Us que provoca a circulação de uma
corrente eléctrica I s, que irá provocar uma queda de tensão na impedância de fugas do estator,
Z σs = Rs + j Xσs. A corrente I s conjuntamente com a corrente rotórica reduzida ao estator I ’r é
responsável pela criação de um fluxo magnético girante que induz no enrolamento do estator
uma força electromotriz Es = j Xm ·(I s + I ’r).
O fluxo magnético do campo girante induz no enrolamento estatórico dessa fase uma força
electromotriz E’r ≡ Es = j Xm ·(I s + I ’r), que vai provocar a circulação nesta segunda malha de uma
corrente rotórica reduzida ao estator I ’r, que provoca quedas de tensão na impedância de fugas do
rotor reduzida ao estator Z ’σr = R’r + j X’σr e na resistência variável com o deslizamento R’r/s.
Xσs
Xm
Us
I’ r
© Manuel Vaz Guedes
1993
R’r/s
Is
X’σ r
I s + I’ r
Rs
Us
X’σ r
I’ r
Xm
Is
R– 34
modelização
Xσs
I s + I’ r
Rs
—
R’r/s
O Motor de Indução Trifásico
Fig. 12 – Esquema eléctrico equivalente por fase reduzido ao estator
Este esquema eléctrico equivalente pode assumir outras formas [CCC–2; f 2.9]. Uma delas resulta
de se considerar que a resistência variável (R’ r /s) é a soma de uma resistência fixa R’ r e de uma
resistência variável ((1 – s )/s)·R’ r :
(R’r/s) = R’r + ((1 – s )/s)·R’r.
As equações eléctricas assumem agora a forma,
~
U s = Rs·Is + jX σs·Is + jX m ·(Is + I’r)
0 = Rr·I’r + jX’ σr·I’r + jX m ·(Is + I’r) + ((1 – s)·Rr/s)·I’r
sr
(66)
e o circuito eléctrico equivalente por fase correspondente é:
Xσs
R’ r
I’ r
(1 – s)·R’r/s
Us
X’σ r
Xm
Is
I s + I’ r
Rs
Fig. 13 – Outra forma do esquema eléctrico equivalente por fase reduzido ao estator
Nestes esquemas eléctricos equivalentes não está representada a perda de energia no circuito
magnético: as perdas magnéticas. Habitualmente [CCC–2] tal é feito por uma resistência (Rm ) em
paralelo com a reactância de magnetização (Xm ). De acordo com a consideração de estudo o
ciclo histerético do material tem área nula, e como a sua superfície é proporcional à densidade de
perdas magnéticas do material ferromagnético do núcleo, as perdas magnéticas “são” nulas e não
podem aparecer representadas. Na realidade, como existem sempre perdas magnéticas elas são
consideradas apenas na análise energética do motor de indução trifásico.
Outras considerações de natureza física permitem estabelecer uma condição de estudo que
assegura que o fluxo magnético permanece constante para todo o regime de carga da máquina I ’r.
Tal condição de estudo restringe o domínio de validade do modelo construído para o motor de
indução trifásico, mas permite obter um esquema equivalente simplificado por fase [CCC–2; f.
2.11].
Actualmente, a possibilidade de utilização de meios de cálculo poderosos, mas extremamente
acessíveis, retirou o interesse a estes métodos aproximados de estudo do motor de indução
trifásico em regime permanente sinusoidal simétrico; assim como a outros métodos gráficos
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 35
modelização
baseados nas mesmas aproximações — diagrama fasorial e diagrama circular.
5. 5
A ná lis e Ene rg é t ic a
No caso de um sistema electromecânico de conversão de energia que funciona como motor, isto é
que promove a conversão de energia eléctrica em energia mecânica com perdas de energia, a
aplicação do princípio da conservação de energia leva ao seguinte balanço energético [MVG–3] :
0 (a energia eléctrica consumida – a energia de perdas eléctricas) =
= (energia mecânica fornecida + a energia de perdas mecânicas) +
+ (aumento de energia armazenada no campo magnético + a energia
dissipada em perdas magnéticas)
O diagrama energético para um motor está representado na figura seguinte:
ENERGIA
ELÉCTRICA
ENERGIA
MECÂNICA
Pot ncia
til
Potência
Transformada
Potência
Total
perdas Joule
perdas Joule
(estator)
(rotor)
perdas
mecânicas
Fig. 14 – Diagrama energético para um motor eléctrico
entreferro
Ao efectuar-se a análise energética do motor de indução trifásico em regime permanente
sinusoidal simétrico, tem de se atender a que se trata de uma análise global do comportamento
energético do motor, apesar de efectuada com auxílio do esquema eléctrico equivalente por fase.
Estator
Xσs
R’ r
I’ r
(1 – s)·R’r/s
Us
X’σ r
Xm
Is
I s + I’ r
Rs
Rotor
Fig. 15 – Esquema eléctr ico equivalente por fase do motor de indução trifásico
Nesta análise energética quando se considera que as grandezas eléctricas de alimentação estão
representadas pelos seus valores eficazes Us e Is, verifica-se que a potência total consumida pelo
motor de indução trifásico é dada pela potência activa eléctrica Pt = 3·Re(Us·I s*) = 3·Us·Is· cos ϕs.
Esta potência eléctrica destina-se a alimentar as perdas Joule no circuito estatórico
PJs = 3·Rs·Is2 mais a potência eléctrica activa que vai ser transferida para o rotor
Psr = 3·Es·Is·cos ϕs = 3·E’r·I’r·cos ϕr = 3·(R’r/s)·I’r2 .
Como se considerou que no motor não existiam perdas magnéticas, , a potência eléctrica total
não alimenta essas perdas. E surge, assim, uma forma de considerar as perdas magnéticas
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 36
modelização
realmente existentes na dedução adoptada para obtenção das equações de funcionamento do
motor: considera-se que a potência total do motor é o valor da potência eléctrica absorvida pelo
motor menos o valor das perdas magnéticas da máquina.
Parte da potência eléctrica activa que foi transferida para o rotor é dissipada em calor, poe
perdas Joule, no enrolamento rotórico PJr = 3·R’r·I’r2 = s·Psr, e a restante parte é convertida,
integralmente, em potência mecânica Pel = 3·(R’r/s)·I’r2 – 3·R’r·I’r2 = 3·((1–s)/s)·R’r·I’r2 = (1 – s) ·Psr =
= ωrm ·Tel.
Parte daquela potência mecânica alimenta as perdas mecânicas da máquina Pmec (perdas por
atrito e de ventilação) , enquanto que a parte restante fica disponível no veio da máquina como
potência útil, Pu = ωrm ·Tm .
O rendimento em potência da máquina é dado por: η = Pu /Pt = (Pt – Pp)/Pt .
No circuito eléctrico rotórico existe uma parte da energia eléctrica — a energia de deslizamento —
que pode ser alterada mediante a variação da resistência rotórica R”r = R’r + R’ext . Esta variação é
efectuada apenas no motor de indução trifásico com rotor bobinado, mediante a introdução de
uma resistência variável Rext no circuito rotórico. O valor da energia de deslizamento pode ser
controlado, o que permite alterar a velocidade de rotação da máquina — controlo de velocidade —
ou pode ser recuperado para a rede eléctrica de alimentação do motor — recuperação da energia de
deslizamento.
Para o motor de indução trifásico funcionar necessita que lhe seja fornecida um energia eléctrica
reactiva para criar e manter o campo magnético da máquina. A potência reactiva total Qt =
3·Us·Is· sen ϕs vai alimentar o consumo de potência reactiva nas diferentes indutâncias
representativas da criação dos diferentes fluxos magnéticos (de fugas e comum) da máquina,
Qt = 3·Us·Is· sen ϕs = 3·Xs·Is2 + 3·Xm·(Is + I’r)2 + 3·X’r·I’r2
(67)
Como o motor de indução apresenta sempre um factor de potência indutivo menor do que a
unidade é importante a análise do seu comportamento como consumidor de energia reactiva.
5. 6
Ca ra c t e rís t ic a s d e F unc io na m e nto
A análise do funcionamento de um motor de indução trifásico em regime permanente sinusoidal
simétrico é constituída, essencialmente, pela determinação de uma série de valores das
grandezas características de funcionamento para diferentes valores da situação de carga do
motor, quando a tensão de alimentação é constante.
As grandezas físicas normalmente caracterizadas são a velocidade, a corrente eléctrica
absorvida da rede, o factor de potência do motor, o rendimento e o binário motor. Com conjuntos
desses valores são traçadas curvas características de funcionamento, relacionando duas ou três
grandezas físicas.
Para determinação dos valores das grandezas físicas características utiliza-se o modelo
desenvolvido, definido pelas equações (63), ou outras delas derivadas, ilustrado pelo esquema
eléctrico equivalente por fase (fig. 13) respeitando a análise energética feita para esta máquina.
Para esta determinação utilizam-se os valores dos parâmetros obtidos por ensaio experimental
ou por estimação na fase de projecto.
Os parâmetros característicos necessários à utilização do modelo reduzido ao estator do motor de
indução trifásico (eq. 66 e fig. 13) são:
Rs — resistência do estator
© Manuel Vaz Guedes
Xσs — reactância de fugas do estator
1993
O Motor de Indução Trifásico
—
R– 37
modelização
Z s = Rs + j Xσs
R’r — resistência rotórica reduzida ao estator X’σr — reactância de fugas do rotor reduzida ao estator
Z ’r = R’r + j X’σr
Xm — reactância de magnetização
Para facilitar a determinação das diversas grandezas físicas características do funcionamento
do motor de indução, considerando o efeito da impedância de magnetização Z m = jXm , pode-se
simplificar o circuito eléctrico equivalente com a utilização do teorema de Thévenin, {ver
apêndice D}.
5. 6. 1
D e t e r min a ç ã o
das
G ran dez as
C a r a c t e r ís t ic a s
Numa situação de carga da máquina em que se conhece a tensão de alimentação (valor eficaz) Us,
que se toma para origem das fases / 0° , e a velocidade de rotação do motor ωrm , podem
determinar-se as restantes grandezas características, quando se conhecem os parâmetros do
circuito eléctrico equivalente da máquina e a respectiva velocidade de sincronismo ωs.
A partir da velocidade de rotação da máquina e da velocidade de sincronismo pode-se
determinar o valor do deslizamento,
s = (ωs– ωrm )/ωs
O que permite calcular o valor da resistência eléctrica rotórica reduzida,
R’r /s
ou
R’r
e
((1 – s)/s)·R’r
Com utilização do teorema de Thévenin pode determinar-se a impedância série equivalente ao
conjunto das impedâncias rotórica reduzida e de magnetização,
Z Tr = (jXm ·((R’r/s) + jX’σr))/((R’r/s) + j (Xm + X’σr))
e com este valor pode-se determinar a impedância equivalente ao circuito eléctrico,
Z cr = Z Tr + Z s = [(jXm ·((R’r/s) + jX’σr))/((R’r/s) + j (Xm + X’σr))] + (Rs + jXσs)
Rs
Pode-se determinar o valor da corrente eléctrica absorvida pelo
motor,
4
X σs
RTr
Is
X Tr
Z Tr
Us
I s = Us/Z cr = |I s|/ ϕs
Como o motor de indução trifásico está a funcionar em regime
permanente sinusoidal simétrico o factor de potência do motor é:
4
λ ≡ cos ϕs
Considerando, agora o divisor de corrente formado pelo paralelo do circuito de magnetização e
pelo circuito rotórico reduzido, pode -se determinar o valor da corrente eléctrica rotórica
reduzida ao estator I ’r,
4
I ’r = (Z m /(Z ’r + Z m ))·I s
ou
I ’r = [(jXm )/((R’r/s) + j(Xm + X’σr))]·I s
Pode-se agora seguir a análise energética para determinar as restantes grandezas características.
A potência total Pt absorvida pelo motor é:
4
Pt = 3·|Us|·|I s|·cos ϕs
A potência de perdas Joule no estator é:
PJs = 3·Rs·|I s|2
A potência transferida do estator para o rotor é:
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 38
modelização
Psr = 3·(R’r/s)·|I ’r|2
A potência eléctrica transferida para o rotor alimenta as perdas Joule no rotor,
PJr = 3·R’r·|I ’r|2 = s·Psr
e a parte restante é integralmente convertida em potência mecânica no interior da máquina,
4
Pel = 3·[((1 – s)/s)·R’r]·|I ’r|2 = (1 – s)·Psr = ωrm ·Tel
O binário electromagnético tem por expressão:
4
Tel = (1/ωrm )·Pel = (1/ωrm )·3·[((1 – s)/s)·R’r]·|I ’r|2
Conhecendo-se o valor das perdas mecânicas Pmec , é possível determinar a potência útil Pu da
máquina,
Pu = Pel – Pmec
O binário motor Tm apresentado pela máquina no veio é:
4
Tm = Pu /ωrm
O rendimento em potência da máquina é:
4
η = Pu /Pt
Através deste conjunto de expressões pode-se determinar facilmente as características de
funcionamento do motor de indução trifásico para qualquer regime de carga. É de notar que se
torna muito fácil programar estas expressões, ou utilizar uma folha de cálculo electrónica
(spreadsheet) na determinação das características de funcionamento da máquina.
5. 6. 2
C a r a c t e r ís t ic a
Me c â n ic a
T( s)
Na caracterização do funcionamento das máquinas eléctricas utilizam-se curva
de funcionamento. São representações gráficas da relação entre duas grandezas
do funcionamento da máquina; os valores numéricos para o traçado
características podem ser determinados pela aplicação sucessiva das expressões
apresentadas (5.6.1) .
I
T
1
ωs
ωrm = 0
Pt
0,8
0,6
0,4
s
0,2
0
Fig. 16 – Curvas características do funcionamento do motor de indução trifásico
© Manuel Vaz Guedes
1993
características
características
dessas curvas
anteriormente
O Motor de Indução Trifásico
—
R– 39
modelização
No entanto o andamento dessas curvas e o valor dos seus pontos importantes podem ser previstos
mediante a análise das respectivas expressões analíticas.
Como o motor de indução trifásico é uma máquina eléctrica assíncrona utiliza-se o
deslizamento s como parâmetro característico para prever o andamento da característica de
funcionamento mecânica T(s), que relaciona o valor do binário electromagnético com o
deslizamento.
Atendendo a que a potência eléctrica integralmente convertida em potência mecânica,
Pel = 3·[((1 – s)/s)·R’r]·|I ’r|2 = ωrm ·Tel
é uma função da corrente eléctrica rotórica reduzida ao estator, é necessário encontrar uma
expressão para o valor dessa corrente eléctrica. A aplicação do teorema de Thévenin {ver apêndice
D} permite determinar a impedância equivalente ao conjunto do circuito eléctrico estatórico e do
circuito de magnetização, assim como a tensão equivalente aplicada a esse circuito.
As respectivas expressões são (D.5 e D.6) :
Z T = (jXm ·(Rs+ jXσs))/(Rs+ j (Xm + Xσs)) = RT + j XT
UT = (jXm /(Rs+ j (Xm + Xσs))·Us = (A + j B)·Us
A impedância total do circuito vista dos terminais de entrada é:
Z cs = Z T + Z ’r = [(jXm ·(Rs+ jXσs))/(Rs+ j (Xm + Xσs))] + (R’r/s) + jX’σr)
Z cs = (RT+ (R’r/s)) + j( XT + X’σr)
A corrente eléctrica rotórica reduzida ao estator tem por expressão:
I ’r = UT/Z cs = ((A + j B)·Us)/((RT+ (R’r/s)) + j( XT + X’σr))
Como,
Pel = ωrm ·Tel = 3·[((1 – s)/s)·R’r]·|I ’r|2
e (1 – s) /ωrm = 1/ωs
A2 + B2
T el = 3 · R'r ·
· Us 2
ω s s R + R'r 2 + X + X' 2
T
s
T
σr
(68)
T
Binário T max
máximo
Ta
Binário de
arranque
Binário
Tn
nominal
1
© Manuel Vaz Guedes
0,8
0,6
s
0,4
1993
0,2
0
O Motor de Indução Trifásico
—
modelização
R– 40
Uma análise dos principais pontos de funcionamento do motor de indução trifásico pode ser
feita com auxílio da expressão do binário electromagnético e com o andamento típico da
característica mecânica.
Arranque (s = 1)
No arranque do motor a velocidade angular do veio é nula ωrm = 0 e o deslizamento é unitário s =
1. Para esse valor do deslizamento a expressão (68) tem um valor não nulo T(s)|s=1 ≠ 0. Existe,
por isso, um binário de arranque directo Tad que tem por expressão:
A2 + B2
T ad = 3 · R'r ·
· Us 2
ωs
RT + R'r 2 + XT + X'σr 2
Verifica-se que o motor de indução trifásico tem um binário de arranque intrínseco, por isso
tenderá a rodar quando lhe é plicada uma tensão nos terminais. O valor desse binário de
arranque pode ser alterado por alteração, na fase de projecto, dos valores das reactâncias de
fugas. Por construção o binário de arranque directo é superior ao binário nominal da máquina.
Sincronismo (s = 0)
Atendendo ao princípio de funcionamento do motor de indução trifásico verifica-se que esta
situação nunca chega a ser atingida quando a máquina funciona como motor. Teria de ser
accionada por uma outra máquina primária para funcionar com uma velocidade igual à
velocidade de sincronismo ωrm = ωs. Nesta situação binário electromagnético desenvolvido é
nulo Ts = 0.
Funcionamento em vazio (s ≈ 0)
Nesta região de funcionamento o binário desenvolvido pela máquina é muito pequeno e destina-se somente a alimentar o binário correspondente às perdas mecânicas da máquina. Porque essa
perdas mecânicas, apesar de pequenas, existem sempre a máquina nunca atinge a velocidade de
sincronismo.
Regime nominal (0,03 ≤ sn ≤ 0,05)
O ponto de funcionamento à plena carga encontra-se numa parte quase–rectilínea da
característica mecânica do motor (entre o binário nulo e o binário máximo). Nessa parte da
característica o funcionamento da máquina como motor é estaticamente estável: uma pequena
variação da velocidade não afasta a máquina do seu ponto de funcionamento [CCC–2].
Binário Máximo
No funcionamento do motor de indução entre o arranque e a plena carga existe um ponto em que
o binário electromagnético desenvolvido atinge um valor máximo (Tmax, smax).
Conhecida a expressão do binário electromagnético desenvolvido num motor de indução
trifásico é possível determinar o valor do deslizamento que a torna máxima assim como o valor
desse máximo. Basta diferenciar a expressão (68), ou recorrer a um programa de cálculo
simbólico.
dT(s)/ds = 0
⇒
smax =
R'r
2
RT + (XT + X'σr)2
e o valor do binário máximo é:
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
T max =
3 ·
2·ωs R +
T
—
modelização
A2 + B2
2
R2
T + (XT + X'σr)
R– 41
· Us 2
O binário máximo não depende da resistência rotórica, mas o deslizamento para o qual ocorre o
binário máximo depende dessa resistência. O binário máximo é proporcional ao quadrado da
tensão de alimentação e inversamente proporcional ao valor das impedâncias rotóricas.
Outras regiões de funcionamento
Para além da região de funcionamento como motor (0 ≤ s ≤ 1) existem outras regiões de
funcionamento da máquina de indução trifásica.
Para um deslizamento maior do que a unidade (1< s < 2) a máquina funciona como freio porque o
rotor está a ser accionado numa direcção contrária à da direcção de rotação do campo magnético
girante por uma carga mecânica.
Para um deslizamento negativo (– ∞ < s < 0) a máquina é accionada com uma velocidade superior
à velocidade de sincronismo na direcção de rotação do campo magnético girante (ωrm > ωs). Nesta
situação de funcionamento tem de existir uma fonte de energia reactiva, para criação e
manutenção do campo magnético comum e do campo magnético de fugas, que poderá ser a rede
eléctrica a que máquina está ligada ou um banco de condensadores.
Energia de deslizamento
No circuito eléctrico rotórico existe uma parte da energia eléctrica que pode ser alterada
mediante a alteração da resistência rotórica através de um reóstato Rext . Esta variação apenas
se pode efectuar no motor de indução trifásico de rotor bobinado. Com a variação da resistência
rotórica, por introdução de uma resistência variável em série nesse circuito, obtêm-se uma
alteração da característica mecânica do motor.
T
s
t
Rex
Fig. 17 – Variação da característica mecânica do motor de indução trifásico de rotor bobinado
Dentro ds condições de estudo adoptadas foi possível caracterizar o funcionamento do motor de
indução trifásico em regime permanente sinusoidal simétrico. Eventualmente, podiam-se
efectuar outras aproximações atendendo à situação de funcionamento momentânea do motor.
5. 7
Es t im a ç ã o d o s P a râ m e t ro s
A determinação do valor dos parâmetros que entram nas equações que regem o funcionamento
do motor de indução trifásico em regime permanente sinusoidal simétrico, e que são utilizados
no esquema eléctrico equivalente reduzido, pode ser feita através de um conjunto de ensaios, que
têm a particularidade da máquina nunca consumir a sua potência nominal; são, por isso,
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 42
modelização
ensaios económicos.
Estes ensaios são efectuados de acordo com o estipulado em Normas internacionais [IEEE–112] .
Determinação da Resistência Estatórica por Fase
A medida da resistência estatórica Rs por fase é feita pelo método do voltímetro–amperímetro.
Efectua-se uma correcção para a temperatura de funcionamento da máquina (75 °C).
O valor da resistência é determinado medindo-se a tensão aplicada a dois terminais da máquina
e a corrente eléctrica que circula no circuito; como o circuito estatórico se encontra ligado em
triângulo há que efectuar a determinação do valor da resistência por fase.
A
V
A correcção da resistência Rsa medida à temperatura ambiente ta {°C} para o valor Rsc à
temperatura tc {°C} é feita através da fórmula:
Rsc = ((234,5 + tc)/(234,5 + ta ))·Rsa
Com este ensaio determina-se o valor da resistência estatórica Rs.
Ensaio em Curto-Circuito com o Rotor Travado
Encontrando-se o rotor travado o deslizamento da máquina
durante este ensaio é unitário (s = 1). Como o rotor está
travado e o circuito rotórico está em curto-circuito é
necessário um valor de tensão reduzido (quando comparado
com a tensão nominal) para obter a circulação da corrente
eléctrica nominal no circuito estatórico. Como a tensão é reduzida, também são reduzidas as
perdas magnéticas, a indução magnética e a corrente de magnetização.
O circuito eléctrico equivalente por fase para esta situação é o representado na figura, onde se
despreza o circuito de magnetização.
Rs
Xσs
X’σ r
R’ r
Icc
Xm
Ucc
Este ensaio envolve um esforço mecânico e térmico grande para a máquina: deve ser realizado
com brevidade e segurança.
Durante o ensaio mede-se o valor da corrente eléctrica estatórica Icc (igual à corrente nominal) , o
valor da tensão aplicada Ucc (com a frequência nominal fn), e a potência absorvida pela máquina
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 43
modelização
Pcc. Utiliza-se uma montagem de medida como a representada (em que se considerou a necessidade
de utilização de transformadores de medida de intensidade de corrente eléctrica).
TI
A
W1
M
3
W2
V
√
~
TI
Com os valores lidos — Ucc ; Icc ; Pcc — determina-se o valor da impedância total do circuito
equivalente Zcc = Ucc/Icc, o valor da resistência total do circuito equivalente Rcc = Rs + R’r =
= Pcc/Icc2 , e o valor da reactância total equivalente Xcc =
Zcc2 – Rcc2 .
Como através da medida em corrente contínua da resistência do circuito estatórico já se conhece
o valor da resistência Rs, é possível determinar o valor da resistência do rotor reduzida ao
estator: R’r = Rcc– Rs.
A separação da reactância estatórica de fugas Xσs e da reactância rotórica de fugas reduzida ao
estator X’σr pode-se fazer recorrendo às normas que estabelecem critérios empíricos para a
separação dessas reactâncias. A Norma IEEE–112 estabelece a seguinte relação entre as duas
reactâncias (Xσs/X’σr).
Xσs/X’σr
Xσs
X’σr
Tipo de Motor
(descrição)
1
0,5·Xcc
0,5·Xcc
classe A;
rotor bobinado
motores com binário de arranque normal, simples gaiola
de baixa resistência (geral)
0,67
0,4·Xcc
0,6·Xcc
classe B *
motores de dupla gaiola com baixa corrente de arranque
0,43
0,3·Xcc
motores com binário de arranque elevado e corrente de
arranque baixa para potência superiores a 2,2 kW
* ensaio feito a uma frequência reduzida f r = sn·fn
0,7·Xcc
classe C *
Através do ensaio com o rotor travado e em curto-circuito é possível determinar os seguintes
parâmetros do esquema eléctrico equivalente por fase reduzido ao estator: reactância de fugas do
estator Xσs; resistência rotórica reduzida ao estator R’r, e a reactância de fugas do rotor reduzida
ao estator X’σr.
Ensaio em Vazio
O ensaio em vazio do motor de indução trifásico permite determinar a
potência das perdas mecânicas da máquina Pmec e fornece informação
sobre os parâmetros do circuito de magnetização Rm e Xm.
Este ensaio realiza-se fazendo rodar a máquina à tensão e frequência
nominal, sem carga mecânica.
Como o motor não possui carga mecânica a energia absorvida durante este ensaio destina-se
somente a alimentar as perdas existentes na máquina nesta situação de funcionamento.
Atendendo ao circuito eléctrico equivalente por fase reduzido ao estator para esta situação, em
que o valor do deslizamento é praticamente nulo (s ≈ 0), verifica-se que durante este ensaio
existem perdas eléctricas no circuito estatórico e perdas magnéticas Pmag representadas no
circuito de magnetização pela resistência Rm, e as perdas mecânicas Pmec devidas ao movimento
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 44
modelização
da máquina (atrito e ventilação) .
Xσs
X’σ r
R’ r
(1 – s)·R’r/s → ∞
Rs
Xm
Iso
Assim, numa primeira fase há que separar as perdas eléctricas,
magnéticas e mecânicas; o que se faz determinando a variação da
potência de perdas magnéticas Pmag = Pto – (Rs·Iso 2 ), com a tensão
Pmag(Uso ) ou com o quadrado da tensão Pmag(Uso 2 ) (apartir de uma
Pmag
valor de Uso= 1,25·U n) O valor dessa potência estimado para a tensão
nula é o valor da potência de perdas mecânicas.
Pmec
Uso
2
Durante o ensaio mede-se o valor da corrente eléctrica estatórica Iso
Uso
(reduzido relativamente à corrente nominal) , o valor da tensão aplicada
Uso (tensão nominal com a frequência nominal fn, ou com frequência reduzida) , e a potência total
absorvida pela máquina Pto. Utiliza-se uma montagem de medida como a representada.
A
W1
M
3
√
~
V
W2
Subtraindo à potência absorvida Pto as perdas Joule no enrolamento do estator (à temperatura de
ensaio) obtém-se a potência de perdas mecânicas e de perdas magnéticas. Subtraindo a essa
potência o valor das perdas mecânicas (atrás estimado) obtém-se o valor da potência de perdas
magnéticas: Pmag = Pto – (3·Rs·Iso 2 ) – Pmec .
A corrente eléctrica absorvida neste ensaio I so está esfasada da tensão de alimentação Uso , de um
ângulo ϕo , tal que cos ϕo = Pmag/(3·Uso ·Iso ). Pode-se, assim determinar a componente óhmica Ia =
Iso ·cos ϕo , e a componente reactiva dessa corrente Im = Iso ·sen ϕo Com estas duas correntes
eléctricas é possível determinar o valor dos parâmetros: Rm = Uso /Ia , e (Xσs+ Xm ) = Uso /Im . A
prévia determinação do valor da reactância de fugas do estator Xσs permite determinar o valor da
reactância de magnetização Xm .
Uma análise crítica do valor da resistência Rm relativamente ao valor dos outros parâmetros
pode justificar a sua não consideração no esquema eléctrico equivalente simplificado reduzido
ao estator.
Através do ensaio em vazio é possível determinar os seguintes parâmetros do esquema eléctrico
equivalente por fase reduzido ao estator: reactância de magnetização Xm ; resistência de
magnetização Rm ; potência de perdas mecânicas Pmec , e potência de perdas magnéticas Pmag.
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
6.
—
R– 45
modelização
Notas de Modelização
Ao estabelecer-se um modelo matemático para o motor de indução trifásico com o auxílio do
Método dos Fasores Espaciais surgiram alguns aspectos importantes que, agora, são
apresentados nestas notas.
¿
Vantagens
A utilização do Método dos Fasores Espaciais tem vantagens:
a)
O fasor espacial de uma grandeza tem um significado físico: como as suas
componentes estão definidas nos eixos de referência de cada fase da grandeza, o
fasor espacial dessa grandeza representa a direcção do eixo da distribuição da
grandeza no entreferro da máquina; a medida do fasor espacial é proporcional à
amplitude da grandeza e a sua posição no plano complexo coincide com todos os
máximos da forma de onda da grandeza.
O fasor espacial trifásico da tensão, da corrente eléctrica, ou do fluxo magnético
pode ser visualizado num osciloscópio, mediante a utilização de uma aparelho
auxiliar (“visualizador do vector de Park”); com tal aparelho é possível estudar o
comportamento destas grandezas, ou detectar avarias, [ESS–1].
b)
A definição de fasor espacial trifásico não é restritiva f = C·(fa + a·fb + a2 ·fc). Como
é uma combinação ponderada dos fasores espaciais das fases pode assumir
diferentes aspectos. Assim, a constante C pode assumir outros valores para além de
C = 2/3. Atendendo à relação do fasor espacial trifásico de uma grandeza trifásica
com a transformação da grandeza trifásica pela transformada das componentes
simétricas trifásicas [MVG–5] , verifica-se que ao escolher C = 2/3 se está a escolher
uma forma não ortogonal da transformada, o que implica que a potência não seja
invariante nesta transformação [CCC–3], ou na aplicação do fasor espacial
trifásico. Tal não sucederia com C =
3/2 .
No sistema trifásico uma carga absorve uma potência eléctrica com valor
instantâneo p = ua ·ia + ub·ib + uc·ic; o valor dessa potência expresso em função dos
fasores espaciais das tensões e das correntes eléctricas é p = (3/2)·Re(u·i *) + 3·uo ·io .
Verifica-se, assim, porque o sistema trifásico de grandezas em que se utiliza o fasor
espacial trifásico não pode conter componente homopolar (uo = (1/3)·(ua + ub+ uc) = =
0; io = (1/3)·(ia + ib+ ic) = 0), o que se verifica em muitas das situações estudadas.
Com a definição adoptada o valor instantâneo de qualquer uma das fases da
grandeza resulta da determinação da parte real dos seguintes fasores espaciais:
fa (t) = Re(f )
c)
fb(t) = Re(a·f )
fc(t) = Re(a2·f )
A variação de uma grandeza física que se pretende representar por um fasor
espacial trifásico no tempo pode ser uma qualquer; a variação da grandeza física
no espaço, desde que periódica, também pode ter um andamento qualquer.
A variação da grandeza no tempo pode ser de diversas tipo: variação contínua ou
variação por saltos. A variação no tempo não tem de ser sinusoidal nem tem de ter
uma frequência constante, o que aconselha a utilização do fasor espacial trifásico
na modelização de conversores electrónicos associados a máquinas eléctricas.
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 46
modelização
A variação da grandeza no espaço não necessita de ser sinusoidal, basta que seja
periódica. Sendo periódica, é decomponível em série de Fourier de termos
harmónicos [MVG–2] , e cada um dos termos harmónicos pode ser representado por
um fasor espacial [STE–1] ,
f(θ) = ∑h Fmh · cos (h·(θ – θh))
F h = Fmh ·exp(j θh)
o teorema da sobreposição garante que o resultado da actuação da grandeza com
uma forma de onda distorcida é uma combinação da resultante da actuação de cada
harmónico.
No entanto, carece de especial cuidado a combinação dos fasores espaciais
harmónicos das diferentes fases devido à variação do tipo de sistema trifásico com
a ordem do harmónico, (sistema directo h = 1, 7, 13, …; sistema inverso h = 5, 11, …).
d)
As representações gráficas associadas
Im
ao método dos fasores espaciais
permitem uma mais fácil percepção do
0,02
comportamento das grandezas físicas;
t = 0,01
t (s)
essencialmente nos casos em que esse
0,04
comportamento
traduz
variações
f
bruscas da amplitude ou da frequência
0,03
da grandeza, o que se traduz por uma
Re
variação da amplitude e da velocidade
de rotação do fasor no plano complexo. O diagrama do lugar geométrico da
extremidade do fasor traduzirá bem essas variações.
e)
É possível estabelecer uma representação gráfica para o binário electromagnético
da máquina porque ele é proporcional ao módulo do fasor do fluxo totalizado e ao
módulo do fasor da corrente eléctrica e é proporcional ao seno do ângulo espacial
entre os dois fasores: Tel = k·|ψs|·|i s|·sen ß.
Esta relação pode ser representada graficamente pela área do paralelogramo
formado pelos dois fasores espaciais.
T el
is
is
T el
ß
ψs
¡
ß
ψs
Outros Modelos para o Motor de Indução Trifásico
A modelização do motor de indução trifásico foi feita com a aplicação do Método dos
Fasores Espaciais, mas tradicionalmente nos estudos do comportamento deste
motor utilizava-se a Teoria Generalizada das Máquinas Eléctricas, [CCC–3] [JON–1]
[KRA–2]. Embora seja possível, e fácil, estabelecer uma relação entre os dois
métodos (“notações”) de modelização, a modelização através do Método dos Fasores
espaciais leva a uma formulação mais expedita das equações da máquina segundo
dois eixos ortogonais [CAS–2] , e à consequente ligação a um universo vasto de
estudos já realizados sobre o motor de indução trifásico, [NOT–1] [KRA–2].
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 47
modelização
A modelização do motor de indução trifásico pela Teoria Generalizada das
Máquina Eléctricas permitia a formulação das equações da máquina segundo dois
eixos referenciais complanos e perpendiculares entre si, rodando a uma velocidade
qualquer ωg, considerando-se essa formulação feita num referencial geral (G; d,q)≡
≡(g; x,y) mediante a aplicação sucessiva de transformações às equações em
coordenadas de fase da máquina. Atendendo a que o número de equações e de
parâmetros é elevado utiliza-se a notação matricial.
Considerando os parâmetros característicos do motor de indução trifásico,
definidos em 2.2, podem estabelecer-se as equações fundamentais da máquina
eléctrica no referencial natural do estator e no referencial natural do rotor;
trata-se da formulação das equações fundamentais em coordenadas de fase.
ψa,b,c,1,2,3}T = [L]·{ia,b,c,1,2,3}T {U a,b,c,1,2,3}T = [R]·{ia,b,c,1,2,3}T + p{ψ
ψa,b,c,1,2,3}T
{ψ
A este conjunto de equações fudamentais — magnéticas e eléctricas — pode-se
aplicar a transformada de Park, ou aplicar em cascata a transformada do número
de fases (3 ∅ 2) seguida da transformada entre eixos animados de velocidade
relativa.
Q
ωr
α
ωr
ß
D
[C 1 ]
b
[C 2 ]
ωg
ωr
y
q
ωg
d
x
1
a
2
3
c
[C p ]
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 48
modelização
O resultado da aplicação da transformada de Park [Cp] ás equações fundamentais
em coordenadas de fase é um conjunto de equações num referencial geral (G; d,q):
equações no referencial d-q.
Considerando que os enrolamentos rotóricos do motor de indução trifásico estão
curto-circuitados, u1 = u2 = u3 = 0, é possível escrever as seguintes equações, [CCC–3]
equações magnéticas
ψ = L·i
ψds = Ls·ids + M·idr
ψqs = Ls·iqs + M·iqr
ψdr = M·ids + Lr·idr
ψqr = M·iqs + Lr·iqr
equações eléctricas
u = R · i +p ψ
uds = Rs·ids + pψds – ψqs·pθg
uqs = Rs·iqs + ψds·pθg + pψqs
udr = 0 = Rr·idr + pψdr – ψqs·p θg – θr
uqr = 0 = Rr·iqr + ψds·p θg – θr + pψqr
(69)
No referencial (G; d,q) a equação do binário electromagnético tem por expressão,
T = (3/2)· ψds·iqs – ψqs·ids
ωg
(70)
ωg
y
q
d
x
Estas equações fundamentais do motor de indução trifásico encontram-se
implícitas na notação do fasor espacial trifásico. Como o fasor espacial trifásico é
uma grandeza plana definida por duas quantidades (as suas componentes f = fx+ jf y , ou
(| f|, / f )) pode-se decompor as suas equações fundamentais (41),
ψ s = ψ sx+jψ sy = Ls·(isx+jisy) + M·(irx+jiry)
ψ r = ψ rx+jψ ry = M·(isx+jisy) + Lr·(irx+jiry)
d(ψ sx +jψ sy )
us = usx+jusy = Rs·(isx+jisy) +
+ jω g ·(ψ sx+jψ sy)
dt
d(ψ rx +jψ ry )
ur = urx+jury = 0 = Rr·(irx+jiry) +
+ j( ωg – ω r)·(ψ rx+jψ ry)
dt
(71)
obtendo-se um conjunto de equações fundamentais análogo ao anterior. Também
para a equação do binário electromagnético se verifica que:
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 49
modelização
T = k·Re(j ψ s ·i* s ) = k·(ψ s × is ) = k· (ψ sx +jψ sy ) × i sx +ji sy )
= k·(ψsx·isy – ψsy·isx)
(72)
Mostra-se, assim, que a notação complexa das equações (41) apresenta vantagens
de escrita sobre a notação das equações (69-70).
Com a aplicação do Método dos Fasores Espaciais conseguiu-se uma forma fácil, e
com uma escrita simples, de obtenção de um modelo matemático para o motor de
indução trifásico. O modelo obtido pode ser utilizado no estudo do regime
permanente sinusoidal (5.) ou no estudo do regime transitório de funcionamento
daquele motor, [JON–1] [KRA–1].
¬
Regime Permanente Sinusoidal Simétrico
A utilização do Método
M #4
TIPO
dos Fasores Espaciais
permitiu
obter
um
ISOL.
9,2 A
380 V
4
CL. B
modelo
matemático
(50-53) para o estudo do
50 H z cos ϕ
1430
rot/min
funcionamento
do
motor
de
indução
~~~~
~~~~
V
A
ROTOR
trifásico
em regime
permanente sinusoidal
simétrico. Pode--se efectuar esse estudo para uma máquina real.
kW
0,81
Este motor foi submetido aos ensaios económicos e depois foram tratados os dados obtidos.
A ligação do estator é em triângulo
Ensaio em corrente contínua — Resistência medida RUV = 2,868 Ω ; temperatura ambiente 22 °C.
U
b
Rs
a
c
V
Como a ligação dos enrolamentos de cada fase é em triângulo e se consideram
iguais, a resistência lida é o valor da resistência, em corrente contínua, do
agrupamento de resistências de fase RUV = Ra // (Rb + Rc ) o que implica que a
resistência de qualquer fase seja igual a 3/2 do valor lido: RUV = (3/2)·Rlido. A
resistência da estrela equivalente é Rs = RUV/2.
A correcção do valor da resistência para a
temperatura de serviço (75 °C) dá:
Is
Us
Rs
Rs75 = ((234,5+75)/(234,5+22))·2,868 = 1,21·2,868 = 3,46 Ω
A resistência eléctrica por fase do enrolamento equivalente em estrela
(monofásico) é :
Rs = 3,46/2 = 1,78 Ω
No circuito equivalente em estrela a tensão aplicada a cada fase é a tensão simples (Ulido/ 3 ), e a
intensidade da corrente eléctrica é o valor lido nos ensaios efectuados com as montagens de medida
apresentadas (5.7).
Ensaio em Vazio — Uo = 380 V; Io = 5,21 A; Po = 354,5 W
( 1428 rot/min; R = 3,05 Ω)
Para separação das perdas magnéticas e das perdas mecânicas efectuou-se um ensaio de diminuição
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 50
modelização
gradual da tensão de alimentação,
Uo (V)
40
280
320
360
380
400
420
Io (A)
1,1
2,73
3,38
4,43
5,21
6,23
7,48
Po (W)
51,25
167,5
211,0
288,0
354,5
418,5
552,5
Constata-se, imediatamente, que este ensaio foi mal executado e que existe uma falta de valores entre
Uo = 40 V e Uo = 280 V.
Apesar disso procurou-se obter, graficamente, a separação das perdas mecânicas e das perdas
magnéticas.
600
P (W)
300
Y = M0 + M1*x + M2*x2
M0
56,865
M1
-0,343
M2
0,002
R
0,993
500
400
P (W)
250
200
300
150
200
100
100
50
y = 31,884 + 0,0014x
U (V)
0
U
0
0
105
210
315
420
5,0 104
0
1,0 105
1,5 105
2
2 10
5
Do traçado das curvas Po (Uo ) e P(Uo 2) estima-se que o valor das perdas mecânicas da máquina é um valor
obtido pela média das duas determinações,
Pmec = (56,865 + 31,884)/2 = 44,37 W
O valor das perdas magnéticas à tensão nominal é Pmag = Po – 3·Rs ·Io 2 – Pmec :
Pmag = 354,5 – (3·1,78·(5,27)2 – 44,37 = 282,3 W
A potência eléctrica que, em vazio, alimenta o circuito de magnetização à tensão e frequência nominal
é: Pmag = 282,3 W. Nesta situação cos ϕo = Pmag /( 3 ·Uo ·Io ), ou cos ϕo = 282,3( 3 ·380·5,21) = 0,082
O valor do sen ϕo ≈ 1, o que permite, desde já, justificar o desprezo do ramo óhmico do circuito de
magnetização face ao ramo indutivo.
Assim (Xσs + Xm ) = Uo /(Ios·sen ϕo ) ou ( Xσs + X m ) = (380/
3 ) /((5,21·0,997) = 42,23 Ω
Ensaio em Curto-circuito — Ucc = 91 V; Icc = 9,18 A; Pcc = 815 W
Considerando que neste ensaio toda a energia é consumida em perdas Joule é,
Pcc = 3·Rcc·Is 2
ou
Rcc = (Rs + R’r ) = Pcc/ (3·(Icc)2)
Rcc = (Rs + R’r ) = 815/(3·(9,18)2) = 3,22 Ω
Zcc = Ucc/(Icc/ 3 )
© Manuel Vaz Guedes
ou
Zcc = (91/ 3 )/(9,18) = 5,72 Ω
1993
O Motor de Indução Trifásico
—
R– 51
modelização
Zcc2 – Rcc2
Xcc = (Xσs + X’σr ) =
ou
Xcc = (Xσs + X’σr ) =
5,722 – 3,222 = 4,73 Ω
Considerando que o motor é da classe de dimensionamento A, e que Xσs = X’σr = Xcc /2, resulta
X σs = X’σr = 4,73/2 = 2,36 Ω
Como Rcc = (Rs + R’r ) , é R’r = Rcc – Rs
R’r = 3,22– 1,78= 1,44 Ω
ou
O valor da reactância de magnetização resulta de: (Xσs + Xm ) = 42,23 Ω, ou
X m = 42,23– 2,36 = 39,87
Ω
Pode-se, agora, representar o circuito eléctrico equivalente por fase reduzido ao estator,
Xσs
R’ r
1,44 Ω
Xm
39,87 Ω
Us
2,36 Ω I’ r
2,36 Ω
I s + I’ r
1,78 Ω Is
X’σ r
(1 – s)·R’r/s
Rs
Com a utilização do circuito eléctrico equivalente reduzido ao estator é possível
determinar as características de funcionamento quando a velocidade de rotação é
de 1430 rot/min.
Conhecida a velocidade de funcionamento da máquina é possível determinar o deslizamento. Atendendo a
que a máquina tem 4 polos (dado pela designação do tipo: M #4) e a frequência nominal é 50 Hz, a velocidade
de sincronismo é de 1 500 rot/min. O deslizamento é dado por
s = (ns – nr )/ns ,
ou
s = (1500–1430)/1500 = 0,047 ou
4,7 %
O valor da resistência rotórica para aquela velocidade é de R’r /s ou 1,44/0,047 = 30,64 Ω
A impedância de Thévenin é:
ZTr = ((j39,87)·(30,64 + j2,36))/(30,64 + j(39,87+2,36)) = 17,89 + j15,21 Ω
A impedância do circuito é Zcr = ZTr + Zs ou Zcr = (17,89 + j15,21)+(1,78 + j2,36) = 19,67 + j17,57 Ω
A corrente eléctrica absorvida pelo circuito eléctrico é:
Is = Us /Zcr
ou
Is = ((380/ 3 ) / 0 °) /(19,67 + j17,57) = 8,32 / – 41,77° A
Na linha de alimentação do estator passará uma corrente eléctrica Isl = 8,32 A
O factor de potência do motor, nesta situação de carga, é:
λ = cos ϕs
λ = cos (–41,77 °) = 0,746 i
A potência total fornecida à máquina, nesta condição de carga, é:
Pt =
3 ·Us ·Isl ·cos ϕs
ou
Pt = 3 ·380·8,32·0,746 = 4 085,14W
A corrente eléctrica rotórica reduzida ao estator I’r pode ser determinada atendendo ao divisor de corrente
formado, assim
I’r = (jXm /((R’r /s) + j(Xm + X’σr )) ·Is
ou
Ι’r =((j39,87/(30,64 + j(39,87 + 2,36) ·(8,32 / –41,77 ° ) A
então I’r = 6,36 / –5,81 ° A
A potência eléctrica transferida para o rotor é Psr = 3·(R’r /s)·I’r 2
Psr = 3·30,64·(6,36)2 = 3 718,13 W
A potência integralmente convertida de eléctrica em mecânica é Pel = (1 – s)·Psr,
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 52
modelização
Pel = (1 – 0,047)·3 718,13 = 3 543,38 W
Esta potência alimenta as perdas mecânicas (constantes) da máquina e dispõe no veio a potência útil
Pu = Pel – Pmec
ou
P u = 3 543,38 – 44,37 = 3 499,0 W
O binário útil da máquina é Tu = Pu /ωrm, e como ωrm = 2π·nr ou ωrm = 2·π·(1430/60)= 149,7 rad/s
T u = 3499,0/149,7 = 23,4 Nm
O rendimento da máquina, nesta situação de carga, é η = Pu /Pt,
η = 3 499,0/4 085,14 = 0,857
η = 85,7 %
A repetição dos cálculos efectuados para outros valores do deslizamento permitiria
a determinação das características de funcionamento: electromecânicas Pt (s) e Is(s)
e mecânica T(s).
√
Modelização de Conversores Electrónicos de Potência
Na actualidade o motor de indução trifásico funciona alimentado por um conversor
electrónico de potência, que permite o controlo do motor numa ampla gama de
velocidade.
O conversor electrónico de potência habitualmente utilizado a alimentação do
motor de indução trifásico é o inversor: inversor fonte de corrente eléctrica ou
inversor fonte de tensão [DEW–1].
O circuito de potência de um inversor em ponte trifásica está representado na
figura, tendo-se omitido o circuito de disparo dos tirístores.
O nome de inversor designa um conjunto
+
variado de conversores electrónicos que
promovem uma conversão de energia
M
eléctrica com as características de
3
corrente contínua numa forma com
√
características de corrente alternada. A
Motor
–
de
alimentação do inversor em corrente
Indução
Inversor
contínua é feita a partir de uma fonte de
corrente
contínua
—
rectificador
associado a um circuito de filtragem ou bateria. A saída do inversor pode ser
monofásica ou polifásica (trifásica) e a tensão e a frequência da saída podem ser
constantes ou variáveis.
O funcionamento do circuito de disparo dos tirístores desempenha um importante
papel na definição das características do inversor, em particular da forma de onda
das suas grandezas eléctricas de saída.
Como circuito electrónico o inversor pode ser
visto como um sistema formado por três
unidades em semi-ponte, em que os tirístores
superior
e inferior
de
cada
unidade,
alternadamente, entram e saem de condução.
Para se estudar o funcionamento do inversor, e
© Manuel Vaz Guedes
1993
0
1
O Motor de Indução Trifásico
—
R– 53
modelização
se estabelecer a respectiva forma de onda das grandezas de saída, consideram-se os
tiristores como comutadores ideais, com uma alteração instantânea do seu estado
de condução (!…).
T/6
0
3
uc
5
5T/6
T
t
1
4
3
ub
1
2T/3
1
ua
+
T/2
T/3
6
6
0
5
5
2
1 0 1
2
T/6
a
1 0 0
T/3
b
6
a b c
4
c
2
T/2
2T/3
uab
–
√
5T/6
T
1 1 0
0 1 0
0 1 1
0 0 1
ubc
uca
Para cada intervalo de tempo correspondente a T/6 (≡ π/6 rad), a tensão
instantânea em cada fase — ua , ub, uc — do inversor (idealizado) pode ser
determinada atendendo ao estado de condução dos elementos semicondutores.
O funcionamento do inversor em cada intervalo de tempo do período pode ser
caracterizado pelo respectivo fasor espacial trifásico. Recorre-se, para isso, à
definição de fasor espacial trifásico da tensão u = (2/3)·(ua + a ·ub+ a2 ·uc), à
propriedade 1 + a + a2 = 0, e atribui-se um de dois estados à tensão em cada ramo —
+U × 1 ; –U × 0.
1º Intervalo:
0 < t < T/6
ua = U
ub = –U
(1, 0, 1)
ua = U
T/6 < t < T/3
ub = –U
(1, 0, 0)
uc = –U
u(100) = (2/3)·(1 – a – a2 )·U = (4/3)·U
© Manuel Vaz Guedes
0 rad
uc =U
u(101) = (2/3)·(1 – a + a2 )·U = (4/3)·a·U
2º Intervalo:
a
1993
u(101)
u(100)
0 rad
O Motor de Indução Trifásico
3º Intervalo:
—
T/3 < t < T/2
ua = U
ub = U
R– 54
modelização
(1, 1, 0)
–a 2
uc =–U
u(110)
u(110) = (2/3)·(1 + a – a2 )·U = (4/3)·(–a2 )·U
Os restantes intervalos do período podem ser representados
pelos vértices de um hexágono com centro na origem u(000)
ou u(111) conforme está representado na figura.
0 rad
a2
Verifica-se que ao fim de cada intervalo de tempo, ∆t = T/6, o fasor espacial
trifásico salta de π/3 rad, enquanto que durante o período mantém um valor e uma
posição constante.
Im
u(010)
u(110)
u(110)
u(100) Re
u(011)
u(100) Re
√
u(001)
u(101)
Em regime permanente, devido à cíclica comutação dos elementos semicondutores,
estabelece-se um regime periódico em que o fasor espacial trifásico da tensão passa
por seis diferentes posições fixas, com medida constante, durante um sexto do
período, efectuando um salto quando muda de posição. {Note-se que o lugar geométrico da
extremidade do fasor espacial da tensão estatórica num regime permanente sinusoidal simétrico é uma circunferência (5.1),
que o fasor descreve com uma velocidade angular constante}.
Quando se considera o comportamento real dos elementos semicondutores que não
passam instantaneamente do estado de não condução ao estado de condução, que
têm um tempo de atraso na comutação, verifica-se que o fasor espacial da tensão
não “salta” de π/3 rad ao fim de cada intervalo de tempo, mas o seu extremo
desloca-se ao longo de uma linha, como resultado da soma do fasor de uma tensão
que está a diminuir na fase que sai de condução e do fasor de uma outra tensão cujo
valor está a aumentar na fase que entra em condução.
˝
Este estudo é representativo das modernas condições de funcionamento de um
motor de indução trifásico alimentado por um conversor electrónico de potência
em que o regime de funcionamento
é uma sucessão permanente de estados transitórios.
Este regime de funcionamento provoca um aumento das perdas de energia no motor
de indução trifásico, provoca o aparecimento de oscilações no binário
electromagnético quando ocorre a comutação dos semicondutores e cria problemas
de ruído (audível) e de vibrações em regime contínuo de funcionamento do motor.
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
modelização
R– 55
Por isso um motor de indução trifásico projectado para funcionar em regime
permanente sinusoidal simétrico tem de ser desclassificado (diminuição criteriosa da
potência nominal) quando funciona alimentado por um inversor.
O mesmo tipo de estudo poderia ser efectuado para uma situação de alimentação do
motor de indução trifásico por um conversor electrónico de potência do tipo:
inversor alimentado em corrente eléctrica, [SUB–1].
ƒ
Estratégias de Controlo
Quando o motor de indução trifásico funciona alimentado por um conversor electrónico
de potência o binário electromagnético do motor pode variar de formas diversas,
conforme a estratégia de controlo que está aplicada ao motor. Num passado recente
essas estratégias eram poucas porque eram muito caros os elementos analógicos
necessários para controlar o comportamento do motor. Actualmente, com a
utilização de elementos electrónicos digitais, com a utilização de métodos típicos
do Processamento Digital de Sinal, e com a utilização de métodos de modelização
dos sistemas de accionamento electromecânicos, como o Método dos Fasores
Espaciais, foi possível desenvolver estratégias de controlo que permitiram obter
elevadas características de funcionamento para o motor de indução trifásico.
Uma das estratégias de controlo adoptadas consiste no Controlo por Orientação do
Campo, [BLA–1]. Este método de controlo, que garante uma resposta rápida e estável
do binário, provoca um desacoplamento entre as duas componentes da corrente
eléctrica estatórica; a componente em quadratura com o fluxo totalizado é regulada
de forma a produzir o binário desejado, a componente responsável pela criação do
fluxo estatórico totalizado é regulada para alterar apenas o valor desse fluxo.
Existe, assim, um controlo independente da corrente eléctrica e do fluxo
magnético, análogo ao que se passa no motor de corrente contínua de excitação
separada T = k·φ·I.
O Controlo por Orientação do Campo do motor de indução trifásico só é possível se
for conhecida a posição do fasor espacial do fluxo. Tal conhecimento pode ser
obtido por dois métodos: método directo em que a posição do fluxo magnético é
detectada por sensores (efeito Hall) ou por bobinas de pesquisa; método indirecto em
que um modelo matemático do motor é utilizado para calcular a posição do fasor
do fluxo magnético e do fasor da corrente eléctrica estatórica.
ψs = Ls·is + M·ir
Na modelização do motor de
ψr = M·is + Lr·ir
indução trifásico com o Método dos
Fasores Espaciais obteve-se um
dψs
us = Rs·is +
+ jω g ·ψs
modelo para um sistema de eixos de
dt
referência
ou referência
geral
dψr
ur = 0 = Rr·ir +
+ j( ωg – ωr)·ψr
(g, x,y), que ficou expresso pelo
dt
conjunto de equações (41). Não
T = k·Re(j ψ s ·i* s ) = k·(ψ s × is )
utilizando o índice g para qualificar
as grandezas e considerando as componentes ortogonais de algumas das grandezas
será:
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
ψs = ψsx + j ψsy,
—
R– 56
modelização
i s = isx + j i s y
ωg ≡ ωs
T = k·(ψs x i s) = k·(ψsx ·isy– ψsy·isx)
sQ
x
y
Como o referencial geral está
is
mx
ψ
≡
solidário com o fasor do fluxo
ψm
totalizado, então aquele fasor
isx
tem somente uma componente
isy
θg
sD
segundo o eixo directo, ψs =
ψsx + j 0, ou |ψs| = ψsx. Como o fluxo magnético totalizado do estator ψs é composto
pelo fluxo de fugas desse enrolamento e pelo fluxo comum de magnetização,
é ψs = ψσs + ψm , em que ψσs = Lσs·i s, e quando as bobinas do estator e do rotor têm o
mesmo número efectivo de espiras (3.2.1) ψm = M·i m = M·(i s+ i r).
Assim, no referencial geral solidário com o fluxo magnético totalizado estatórico,
e naquelas condições, é (porque i s x i s = 0 ):
T = k·(ψs x i s) = k·[(Lσs·i s + M·i m ) x i s] = k·M·(i m x i s] = k·(ψm x i s)
T = k·(ψm x i s) = k·(ψmx ·isy – ψmy ·isx)
Devido à escolha da posição do referencial — coincidente com o fluxo magnético
totalizado estatórico — é ψs = ψsx + j 0 e como ψs = ψσs + ψm , é:
\
T = k·ψmx ·isy = k·M·imx·isy
Desta forma, neste referencial geral, o binário electromagnético é proporcional ao
produto do módulo do fluxo totalizado de magnetização (|ψs| = ψsx) e à componente
em quadratura do fasor espacial da corrente eléctrica estatórica (isy). Tal como na
máquina de corrente contínua com excitação separada, T = k·φ·I, pode-se controlar
separadamente a corrente de excitação (i ∅ φ) e a corrente de carga da máquina (I).
A implementação de um sistema de controlo do circuito de disparo dos tiristores do
inversor que obedeça a esta estratégia de controlo é complexa, exigindo que o
sistema tenha possibilidade de calcular (em te mpo real) os valores de referência
característicos da situação de funcionamento da máquina. Tais valores terão de
ser comparados com os valores reais, e o erro irá actuar obre o circuito de controlo
de disparo dos tirístores.
© Manuel Vaz Guedes
1993
—
+
Circuito
de
Comando
dos
Tirístores
R– 57
modelização
Motor de Indução
im ref
ωrm ref
M
–
√
Inversor
–
θr
–
–
isa ref
isb ref 3
isc ref
isQ ref
2
isDref
θg
θ sref
exp(j θ g )
isxref
isyref
Matemático
do
Motor de Indução Trifásico
3
Modelo
O Motor de Indução Trifásico
–MVG.93 –
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
modelização
R– 58
Referências B ib lio g rá f ic a s
[ADK–1]
[ALG-1]
[BAR–1]
[BLA–1]
[CAS-1]
[CAS–2]
[CCC-1]
[CCC-2]
[CCC-3]
[CEI–h]
[CEI–34-1]
[DEW–1}
[ESS–1]
[IEEE-112]
[IEEE-86]
[JEC–37]
[JON–1]
[KRA–1]
[KRA–2]
[KUP–1]
[KOV–1]
[LAN–1]
[MCB–1]
[MIT–2]
[MG–1]
[MVG-1]
[MVG-2]
[MVG-3]
[MVG-4]
[MVG–5]
[NAU–1]
[NOT–1]
[SAY-1]
[STE–1]
[SUB–1]
[VAS–1]
[VEI–1]
B. Adkins R. G. Harley; “The General Theory of Alternating Current Machines”, Chapman & Hall, 1975
P. L. Alger; “Induction Machines — their behavior and uses”, Gordon & Breach, 1970
Ph. Barret; “Régimes Transitoires des Machines Tournantes Électriques”, Eyrolles, 1982
Felix Blaschke; ”The Principle of Field Orientation as Applied to the New TRANSVEKTOR Closed-Loop
Control System for Rotating Field Machines”, Siemens Rev. XXXIX, p. 217, 1972
Carlos Araújo Sá; “Método de Estimação de Parâmetros do Motor de Indução Trifásico para Modelização
de Instalações Industriais”, FEUP, 1988
Carlos Araújo Sá; “Método dos Fasores Espaciais na Modelização de Máquinas Eléctricas Rotativas”,
ELEUP’ 87, 1987
Carlos Castro Carvalho; “Motores Monofásicos Série de Colector”, Porto, 1960
Carlos Castro Carvalho; “Apontamentos para a Disciplina de Máquinas Eléctricas II”, AEFEUP, 1983
Carlos Castro Carvalho; “Apontamentos para a Disciplina de Complementos de Máquinas Eléctricas ”,
AEFEUP, 1983
CEI–Handbook; “Letter Symbols and Conventions”, Comissão Electrotécnica Internacional, 1983
Comissão Electrotécnica Internacional; “Machines Électriques Tournantes — valeurs nominales et
caractéristiques de fonctionnement”, 1969
S. B. Dewan A Straughen; “Power Semicondutor Circuits”, John Wiley, 1975
A. J. Cardoso E. S. Saraiva; “Aplicação da Transformada Complexa Espacial Na Detecção de Avarias
Eléctricas em Motores de Indução Trifásicos”, 2ª R I L I M E , Coimbra 1989
ANSI/IEEE-112; “IEEE Standard Test Procedures for Polyphase Induction Motors and Generators”,
ANSI/IEEE Standard 112, 1984
IEEE-86; “IEEE Standard Definitions of Basic Per-Unit Quantities for Alternating-Current Rotating
Machines”, IEEE Standard 86 {outdrawn}, 1961
Japanese Electrotechnical Commission; “Induction Machines”, Standard JEC, 1979
C. V. Jones; “The Unified Theory of Electrical Machines”, Butterworths 1967
P. C. Krause O Wasynczuk; “Electromechanical Motion Devices”, McGraw–Hill 1989
P. C. Krause; “Analysis of Electrical Machinery”, McGraw-Hill, 1986
K. Küpfmüller; “Électricité Théorique et Appliquèe”, Dunod 1959
P. Kovacs; “Transient Phenomena in Electrical Machines”, Elsevier 1984
A. Langsdorf; “Theory of Alternating-Current Machinery”, McGraw-Hill, 1937
Manuel Corrêa de Barros; “Método Simbólico para Estudo das Máquinas de Corrente Alternada”, Porto
1947
E E Staff M I T ; “Electric Circuits”, MIT Press, 1940
National Electrical Manufacturers Association; “Motors and Generators”, NEMA Standard Publication
MG1, 1978
Manuel Vaz Guedes; “Corrente Alternada — Sistemas Polifásicos”, AEFEUP, 1991, 1993
Manuel Vaz Guedes; “Grandezas Periódicas Não Sinusoidais”, AEFEUP, 1992
Manuel Vaz Guedes; “Sistemas Electromecânicos de Conversão de Energia”, AEFEUP, 1993
Manuel Vaz Guedes; “Máquinas Eléctricas de Colector — Regime Transitório”, AEFEUP, 1986
Manuel Vaz Guedes; “O Motor Síncrono de Pólos Salientes sob Controlo Vectorial”, Caderno de Estudos
de MÁQUINAS ELÉCTRICAS nº 3, pp. 5–17, 1991
D. Naunin; “The Calculation of the Dynamic Behavior of Electric Machines by Space Phasors”, Electric
Machines and Electromechanics, 4, pp. 33–45, 1979
J. Lesenne F. Notelet G Seguier; “Introduction à l’Électrotechnique Approfondie”, Technique et
Docmentation, 1981
M. G. Say; “Alternating Current Machines”, Pitman 1976
J. Stepina; “Fundamental Equations of The Space Vector Analysis of Electrical Machines”, Acta Technica
CSVA 13, (2), pp. 184–197, 1968
V. Subrahmanyam D. Subbarayudu; ”Steady–state Analysis of an Induction Motor Fed from a Current-source Inverter Using Complex-state (Park’s)Vector”, Proc. IEE, 126, p. 421, 1979
P. Vas; “Generalized Analysis of Satured AC Machines”, Archiv fur Elektrotechnik, 64, pp. 57–62, 1981
Cyril G. Veinott J. E. Martin; “Fractional and Subfractional Horsepower Electric Motors”, 4ª Ed,
McGraw-Hill, 1987
_____
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
APÊNDICE
—
R– 59
modelização
A
O Enro lame nt o e m Gaio la
O circuito eléctrico rotórico de um motor de indução trifásico é um circuito eléctrico em curto -circuito, do
tipo “gaiola de esquilo”. A forma do circuito eléctrico rotórico é a de um conjunto de condutores com
desenvolvimento axial, dispostos ao longo do comprimento útil da máquina, e curtocircuitados nas
extremidades pelos anéi s de topo maciços.
Os condutores do rotor não estão isolados, mas sendo constituídos, essencialmente, por alumínio
(eventualmente, por cobre), têm uma resistividade, ρAl = 2,8 x 10–8 Ω·m (ou , em cobre ρCu = 1,72 x 10–8 Ω·m ), que
é muito menor do que a resistividade do material ferromagnético ρFe = 100 x 10–8 Ω·m, que se apresenta
laminado e, eventualmente, com isolamento entre as chapas. Por isso, o percurso das correntes eléctricas
está razoavelmente definido, e o circuito eléctrico está delimitado.
O fo rmato das ranhuras rotóricas, e, portanto, dos
condutores eléctricos rotóricos é variado. No caso do
circuito rotórico ser em alumínio com algumas
impurezas, este é vazado por injecção ou por gravidade,
num molde formado pelo circuito magnético e por moldes
terminais devidamente adaptados. O circuito eléctrico é criado todo de uma vez, podendo ser logo moldadas
aletas de ventilação nos anéis rotóricos.
Quando o circuito eléctrico rotórico é em cobre, as barras de cobre são colocadas manualmente nas
ranhuras e os anéis de topo são ligados às barras por soldadura a alta frequência. Procura-se que as barras
fiquem bem adaptadas às ranhuras (travadas), de forma a evitar vibrações durante o funcionamento do
motor de indução trifásico. Alguns fabricantes, como fase final do fabrico do rotor de um motor de indução
trifásico, mergulham-no numa resina epoxy, que depois é endurecida a temperatura elevada (curada) em
estufa.
São vários os tipos de ligação entre as
barras rotóricas e os anéis de topo,
como
esquematicam ente
está
representado na figura.
A gaiola rotórica de motor de indução
trifásico constitui um enrolamento
para máquina eléctrica de corrente
alternada com particularidades interessantes.
É um enrolamento com o número de pólos igual ao do enrolamento estatórico (2 p) — como o
campo magnético indutor tem uma distribuição espacial com 2p pólos, o sentido das forças
electromotrizes induzidas nas barras do enrolamento rotórico variará com a polaridade do
campo magnético indutor.
1; 16
a
√
Fs
er
ir
⊗ ⊗ ⊗ ⊗ ⊗ ⊗ ⊕ ⊕ ⊕ ⊕ ⊕ ⊕
As correntes eléctricas que circulam nas barras, também, terão um sentido que acompanhará
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 60
modelização
a variação do campo magnético indutor. Por isso, o campo magnético criado por essas
correntes eléctricas, o campo magnético de reacção do induzido, terá tantas alternâncias (2 p)
quantos os pólos do campo magnético indutor.
a
É um enrolamento polifásico — como a variação do campo magnético indutor é sinusoidal no
espaço do entreferro da máquina, também as forças electromotrizes induzidas nas barras do
enrolamento rotórico têm uma variação sinusoid al no tempo. O ângulo de esfasamento
temporal entre as forças electromotrizes induzidas em duas barras consecutivas é igual ao
ângulo de ranhura rotórico γr ( = p·2π/b r rad elect ). Repetindo-se tudo para os pólos seguintes.
Assim, o número de fases do enrolamento rotórico é igual ao número de ranhuras por pares de
pólos: m r = br/p.
a
É um enrolamento com um número de espiras por fase igual a 1/2 — porque cada fase é
constituída somente por uma barra (lado de ida). Um dos anéis funciona como união da
ligação em estrela das diferentes fases, enquanto que o outro anel cria o curtocircuito entre
fases.
a
É um enrolamento com um factor de distribuição igual a 1 — porque tem um número de
ranhuras por polo e por fase igual à unidade, b´ = 1.
a
É um enrolamento com um factor de encurtamento igual a 1 — porque tendo um número de
ranhuras por polo e por fase igual à unidade não existe o ângulo de encurtamento do
enrolamento, ρ = 0.
O factor de enrolamento é igual à unidade, Ke = Kd·Kc = 1. De facto, verifica-se que a força electromotriz
resultante por fase no enrolamento é igual ao módulo da força electromotriz induzida na ranhura
correspondente do polo e da fase; 1= E r/b´·E c.
Esta análise clássica do enrolamento rotórico em gaiola assenta na hipótese de que o valor instantâneo
das correntes eléctricas rotóricas tem uma distribuição espacial sinusoidal. Trata-se de uma hipótese
plausível para estudo do funcionamento em regime permanente do motor de indução trifásico. Existem
outras hipóteses de análise deste tipo de enrolamento, como a que considera que o enrolamento em gaiola
é uma série de vários circuitos eléctricos em malha interligados.
Frequentemente os condutores rotóricos (barras) do motor de indução trifásico apresentam-se inclinados
relativamente ao eixo da máquina. Uma forma de considerar a inclinação dos condutores da gaiola, devido à
inclinação das ranhuras rotóricas, é através do factor de inclinação . Este factor traduz a razão entre a força
electromotriz induzida numa barra com um ângulo de inclinação α, e a força electromotriz induzida na
mesma barra sem inclinação.
Na hipótese de estudo de o campo magnético ter uma distribuição sinusoidal no espaço, e de a variação da
relutância do circuito magnético no espaço, devido às ranhuras estatóricas (semifechadas), ser também
sinusoidal, a inclinação das ranhuras rotóricas provoca uma atenuação dos harmónicos de ranhura do
estator, [CCC–2].
√
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
© Manuel Vaz Guedes
—
modelização
1993
R– 61
O Motor de Indução Trifásico
APÊNDICE
—
R– 62
modelização
B
Transformação entre Referenciais Animados de Velocidade Relativa
No estudo das máquinas eléctricas pela Teoria Generalizada há necessidade de fazer a transformação
entre grandezas referidas a eixos de referência, ou referenciais, diferentes. No caso em que os dois eixos de
referência estão animados de uma velocidade relativa ωr = d αr /dt, por exemplo quando um referencial está
solidário com o estator e o outro referencial está solidário com o rotor, é necessário fazer a respectiva
transformação para um referencial único, [CCC-3].
Considerando, como na figura B1, que o referencial solidário com o rotor (r; α,ß) está avançado de αr
radianos eléctricos sobre o referencial solidário com o estator (s; D,Q], que as bobinas têm um mesmo
número efectivo de espiras N, e que a força magnetomotriz criada pelas correntes eléctricas que
atravessam as bobinas têm de ser iguais, resulta que a igualdade de efeitos magnéticos nos dois sistemas é
obtida quando:
Q
Q
β
β
N·iQ
ωr
N·i
α
ωr
α
αr
αr
D
D
N·iD
Fig. B1 - Referenciais animados de velocidade relativa ωr
N iD = N iD cos αr + N iQ cos (90° - αr) = N iDcos αr + N iQ sen αr
N iQ = –N iD cos (90° - αr) + N iQ cos αr = –N iDsen αr + N iQ cos αr
Desta expressão resulta, após simplificação, a equação matricial que liga as variáveis nos dois referenciais
através da matriz de transformação [C 2 ], [JON–1].
iα
=
iβ
cos αr
sen αr
– sen α r
cos αr
·
iD
iQ
{iα,ß} = [C 2 ]·{i D,Q }
(B.1)
(B.2)
Verifica-se que [C 2 ] T = [C 2 ] –1, pelo que a transformada é ortogonal.
O índice dois da transformada indica apenas que na Teoria Generalizada das Máquinas Eléctricas esta é a
segunda transformada que, antes de ser aplicada, é precedida por uma transfor mação do número de fases
[C 1 ].
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
APÊNDICE
—
R– 63
modelização
C
A Expressão do Binário Electromagnético como Resultado da Lei de Ampère
A expressão do binário electromagnético, escrita como função dos fasores espaciais das grandezas
referidos ao referencial do estator, (s ; D,Q) também pode ser obtida como resultado da aplicação directa da
Lei de Ampère, [MCB–1 ; D.25].
Considera-se o circuito estatórico formado por três bobinas afastadas de 2π/3 rad elect. e percorridas por
um sistema trifásico de correntes eléctricas, com uma variação no tempo qualquer mas esfasadas de 2π/3
rad elect. , e de valor instantâneo ia, ib, ic . Este sistema de correntes estatóricas pode ser representado pelo
seu fasor espacial trifásico i s, porque não existe componente homopolar (ia,+ ib, + ic = 0).
Cada uma das bobinas possui um número igual de espiras eficazes Nes . A força magnetomotriz total criada
pelo circuito estatórico tem o valor Nes ·| i s|. Esta força magnetomotriz distribui-se pelo espaço de
entreferro correspondente a cada fase (γ = r·π/3) com uma densidade periférica com um valor máximo igual
a J m= Nes ·| i s|./ γ = 3·N es ·| i s|./(r·π).
A variação desta densidade periférica de corrente eléctrica ao longo do entreferro é, por construção,
sinusoidal: J( θ) = J m·cos (θ).
a
α
c'
b'
θ
γ
r
b
di
c
a'
A presença de uma onda girante de força magnetomotriz, neste caso em que se considera que o circuito
magnético tem propriedades lineares origina a existência de um campo magnético caracterizado por
um fluxo médio por polo φ s. Na área correspondente a um polo existe uma indução magnética com uma
distribuição sinusoidal B(θ) = Bm·cos (θ + α) cujo valor médio aritmético é Ba = (2/π)·B m.
O fluxo magnético totalizado estatórico ψs= Nes · φ s tem uma medida dada por | ψs| = Nes · | φ s|, por isso o
valor máximo da indução magnética estatórica é: Bm = | ψs|/(2·Nes ·l·r).
A força mecânica elementar df que se exerce sobre uma porção
elementar da banda de corrente eléctrica estatórica di tem um valor que
T ss = – Tel
resulta da aplicação da Lei de Ampère ( f = i ·l x B ), numa situação
em que as grandezas, por construção, têm uma posição perpendicular
no espaço: df = l·B·di.
Com o esta força elementar se exerce a uma distância r do eixo de
rotação desenvolve-se um binário electromagnético elementar que
actua sobre esta porção elementar da bobina estatórica: dT ss = r·df =
r
df
= r·l·B·di.
Como a porção elementar da banda de corrente tem um valor di =
= J(θ)·r·d θ, o valor do binário electromagnético elementar produzido aquela banda elementar de corrente é:
dT ss = r·l·B(θ)·J( θ)·r·d θ = r2 ·l·Bm·J m·cos( θ)·cos( θ + α) d θ
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 64
modelização
O valor do binário electromagnético total, que é produzido pela máquina ao longo da periferia do entreferro
(0 – 2π rad elect.).
⌡ cos( θ)·cos( θ + α) dθ = r2 ·l·Bm·J m·cos (α)
Tss = r2 ·l·Bm·J m·⌠
2π
0
Substituindo os valores de J me Bm encontrados,
J m = 3·N es ·| i s|./(r·π)
e
Bm=| ψs|/(2·Nes ·l·r).
obtém-se:
Tss = (3/2)·| ψs|·|i s|·cos (α)
Como o ângulo espacial entre o fasor das correntes eléctrica estatóricas e o fasor do fluxo magnético
totalizado estatórico deve ser π/2 rad elect. , resulta que α = π/2 – ß, e atendendo á definição de produto
vectorial simbólico, [MCB–1], e determinando o binário electromagnético que actua no rotor (Tel = – Tss),
Tel = – Tss = (3/2)·| ψs|·|i s|·sen(ß) = (3/2)·ψs x i s
Verifica-se, assim, que o binário electromagnético
direccional.
é uma grandeza
Verifica-se que o valor do binário electromagnético é máximo quando se
cosegue que o ângulo espacial ß entre o fasor espacial das correntes
eléctrics estatóricas i s e o fasor espacial do fluxo totalizado estatórico ψs
T el
is
ß
ψs
é de π/2 radianos eléctricos.
T el
D
b
— .C —
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
APÊNDICE
—
R– 65
modelização
D
O Teorema de Thévenin na Simplificação do Circuito Eléctrico Equivalente
Reduzido ao Estator
Num esforço de simplificação das expressões utilizadas para determinar as características de
funcionamento do motor de indução trifásico em regime permanente sinusoidal simétrico a partir do
circuito eléctrico equivalente por fase reduzido ao estator podem estabelecer-se um conjunto de hipóteses
simplificativas relativas ao valor dos parâmetros do circuito de magnetização:
—
“o valor da resistência representativa das perdas no circuito magnético R m é muito grande
quando comparado com o valor da reactância de magnetização X m, (na realidade é
R m ≅ 10·X m). Por isso despreza-se a corrente eléctrica Ia = |( I s+ I ’r )|·cos ϕo face à corrente
eléctrica Im = |( I s+ I ’r )|·sen ϕo”;
—
“considerando-se que a reactância de magnetização X m e a resistência de magnetização R m
são muito grandes despre za-se a influência da impedância de magnetização no circuito”.
Estas hipóteses restritivas são desnecessárias porque com a aplicação do teorema de Thévenin se pode
simplificar o circuito eléctrico equivalente por fase reduzido ao estator.
Rs
Xσs
RT
I s + I’ r
Rm
Us
RT
ZT
UT
Xm
Is
XT
XT
ZT
R’r/s
X’σ r
I’ r
UT
Fig. D.1 – Aplicação do Teorema de Thévenin
O teorema de Thévenin estabelece que
[MIT–2]:
•
um circuito eléctrico formado por elementos passivos e por fontes de tensão, quando visto de
dois pares de terminais, pode ser reduzido a uma fonte de tensão UT em série com uma
impedância de valor constante ZT ;
•
a tensão da fonte UT é igual à tensão entre os dois terminais, quando o circuito está em
aberto;
•
a impedância em série UT é igual à impedância do circuito eléctrico visto dos mesmos
terminais, quando todas as fontes de tensão são substituídas por ligações directas com
impedância nula.
Num esforço de simplificação da notação faz-se:
Zm = 1/ Ym = 1/(G m– j Bm), com Gm= 1/Rm e Bm= 1/Xm
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
—
R– 66
modelização
A impedância do estator é Zs = R s+ j X σs.
*
UT = Zm·I s= ( Zm/(Zm+ Zs))·Us
(D.1)
*
ZT = Zs // Zm = (Zm·Zs)/(Zm+ Zs )
(D.2)
Para o esquema eléctrico equivalente por fase do motor de indução trifásico reduzido ao estator é:
UT =
Zm
·U s
Zm + Zs
1
UT =
ZT =
1
(Gm – j Bm)
+ (Rs + j Xσs)
·
Us =
1
(1 + Rs·Gm + Xσs·Bm) + j (Xσs·Gm – Rs·Bm)
·
Us
(D.3)
Zm · Zs
Zm + Zs
1
ZT =
(Gm – j Bm)
1
(Gm – j Bm)
(Gm – j Bm)
· (Rs + j Xσs)
+ (Rs + j Xσs)
=
(Rs + j Xσs)
(1 + Rs·Gm + Xσs·Bm) + j (Xσs·Gm – Rs·Bm)
(D.4)
Como em alguns estudos de modelização não se considera a resistência de magnetização (R m = ∞), é:
Xm
(Xm + Xσs) – j Rs
j Xm
Rs + j (Xm + Xσs)
UT =
1
(1 + Xσs·Bm) – j Rs·Bm
ZT =
(Rs + j Xσs)
Xm·(Rs + j Xσs)
j Xm·(Rs + j Xσs)
=
=
(1 + Xσs·Bm) – j Rs·Bm
(Xm + Xσs) – j Rs
Rs + j (Xm + Xσs)
·
Us =
·
Us =
·
Us
(D.5)
(D.6)
Eventualmente, pode existir a necessidade de aplicar o teorema de Thévenin à malha representativa do
circuito rotórico reduzido ao estator .
ZTr =
Zm · Z’r
Zm + Z’r
ZTr =
((R’r/s) + j X’σr)
Xm·((R’r/s) + j X’σr)
j Xm·((R’r/s) + j X’σr)
=
=
(1 + X’σr·Bm) – j (R’r/s)·Bm
(Xm + X’σr) – j (R’r/s)
(R’r/s) + j (Xm + X’σr)
R’r/s
Rs
Xσs
RTr
Is
Us
© Manuel Vaz Guedes
XTr
Z Tr
I’ r
Xm
I s + I’ r
RTr
X’σ r
1993
XTr
Z Tr
(D.7)
O Motor de Indução Trifásico
APÊNDICE
—
R– 67
modelização
E
Símbolos para Grandezas e Unidades
G RA ND EZA
U N I DA D E
comprimento
massa
tempo
ângulo (plano)
ângulo de rotação
velocidade angular
força
binário
momento de inércia
coeficiente de atrito
l
m
t
α, β, γ
θ
ω, Ω
F
T
J
D
metro
quilograma
segundo
radiano
radiano
radiano por segundo
newton
newton metro
quilograma metro quadrado
energia
potência
campo eléctrico
potencial (eléctrico)
tensão
força electromotriz
capacidade
E, W
P
E
V
u, U
e, E
C
i, I
H
F, Fm
S
P
Q
λ
f
ω
ϕ, φ
s
N
m
p
n
joule
watt
volt por metro
volt
volt
volt
farad
ampere
ampere por metro
ampere
tesla
weber
weber por metro
henry
henry
ohm
1 por henry
volt–ampere
watt
volt–ampere reactivo
hertz
radianos por segundo
radiano
rotações por segundo
m
kg
s
rad
rad
rad/s
N
N·m
kg·m2
N·m·s/rad
N/m/s
J
W
V/m
V
V
V
F
A
A/m
A
T
Wb
Wb/m
H
H
Ω
H–1
VA
W
v ar
Hz
rad/s
rad
rot/s
T
t
kelvin
grau Celsius
K
ºC
intensidade da corrente eléctrica
campo magnético
força magnetomotriz
indução magnética
fluxo magnético
potencial vector magnético
coef. auto-indução
coef. indução mútua
resistência
relutância
potência aparente
potência activa
potência reactiva
factor de potência
frequência
pulsação
diferença de fase
deslizamento
número de espiras
número de fases
B
ψ, φ; Ψ, Φ
A
L
M
R
R, Rm
número de pares de pólos
número de rotações por
unidade de tempo
temperatura absoluta
temperatura Celsius
newton metro segundo por radiano
newton por metro por segundo
– MVG . 93 –
© Manuel Vaz Guedes
1993
O Motor de Indução Trifásico
modelização
Manuel Vaz Guedes
(Prof. Associado Agre gado)
Fa c ulda de de E nge nha ria
Univ e rs ida de do P ort o
Í N DI CE
1.
2.
2.1
2.2
2.2.1
2.2.2
3.
3.1
3.2
3.2.1
3.2.2
3.2.3
3.2.4
3.2.5
4.
5.
5.1
5.2
5.3
5.4
5.5
5.6
5.6.1
5.6.2
5.7
6.
Aspectos Construtivos do Motor de Indução Trifásico
(Estator, Rotor , Estrutura Mecânica)
Condições de Estudo
Hipóteses de estudo
Parâmetros
Parâmetros Eléctricos
Parâmetros Mecânicos
Modelização
O Método dos Fasores Espaciais
Equações Fundamentais
Equações Magnéticas
Equações Eléctricas
Equação Electromecânica
Equação Mecânica
Síntese
Um Modelo com V alores Reduzidos
Funcionamento em Regime Permanente Sinusoidal Simétrico
Comportamento das Grandezas
Equações Fundamentais
Modelo Reduzido ao Estator
Esquema Eléctrico Equivalente
Análise Energética
Características de Funcionamento
Determinação das Grandezas Características
Característica Mecânica T(s)
Estimação dos Parãmetros
Notas de Modelização
(Vantagens; Outros Modelos para o Motor de Indução Trifásico;
Regime Permanente Sinusoidal Simétrico; Modelização de Conversores Electrónicos;
Estratégias de Controlo)
Referências Bibliográficas
Apêndices
A
O Enrolamento em Gaiola
B
Transformação entre referenciais animados de velocidade relativa
C
A Expressão do Binário Electromagnético como Resultado da Lei de Ampère
D
O Teorema de Thévenin na Simplificação do Circuito Eléctrico Equivalente Reduzido ao Estator
E
Símbolos para Grandezas e Unidades
pp. 1 ÷ 65
© Manuel Vaz Guedes
Rascunho_1993