UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
DEPARTAMENTO ACADÊMICO DE ELETRÔNICA
CURSO DE ENGENHARIA DA COMPUTAÇÃO
ALESANDRO ALESSI
IVAN DOS PASSOS
JÁDER ANDRÉ LOURENÇO RIBEIRO
BENGALA ELETRÔNICA VIA SENSOR DE ULTRASSOM
TRABALHO ACADÊMICO
CURITIBA
2010
ALESANDRO ALESSI
IVAN DOS PASSOS
JÁDER ANDRÉ LOURENÇO RIBEIRO
BENGALA ELETRÔNICA VIA SENSOR DE ULTRASSOM
Projeto apresentado à disciplina de Oficinas
de Integração II do Curso de Engenharia de
Computação da Universidade Tecnológica Federal
do Paraná como requisito parcial para aprovação.
Orientador:
João Alberto Fabro
CURITIBA
2010
Bengala Eletrônica via sensor de Ultrasssom
Monografia do projeto de Oficinas de Integração II sob o tı́tulo Bengala Eletrônica via sensor
de Ultrassom, aprovada por:
Professor Orientador
Aluno 1
Aluno 2
Aluno 3
RESUMO
ALESSI,Alesandro; PASSOS, Ivan dos; RIBEIRO, Jáder A. L.. Bengala Eletrônica via sensor
de Ultrassom. 24 f. Trabalho Acadêmico – Curso de Engenharia da Computação, Universidade
Tecnológica Federal do Paraná. Curitiba, 2010.
Este documento apresenta um projeto que aborda o estudo e o desenvolvimento de um dispositivo eletrônico baseado em um sensor de ultrassom para auxı́lio de deficientes visuais. O objetivo deste projeto constitui-se, principalmente, do estudo dos conceitos de eletrônica envolvidos
no projeto e a aplicação dos conhecimentos já adquiridos em outras matérias para a construção
de um artefato que possibilite aos deficientes visuais orientarem-se em uma determinada região
e diminuir os riscos de colisão com algum anteparo.
Palavras-chave: Bengala Eletrônica, Deficiente Visual, Sensor de Ultrassom
ABSTRACT
ALESSI,Alesandro; PASSOS, Ivan dos; RIBEIRO, Jáder A. L.. . 24 f. Trabalho Acadêmico –
Curso de Engenharia da Computação, Universidade Tecnológica Federal do Paraná. Curitiba,
2010.
This document presents a project that addresses the study and development of a eletronic device
based on an ultrasonic sensor for the support of visually impaired. The objective of this project
constitutes, principally, on the study of the eletronic concepts on the project and the aplication
of already acquired knowledge in other subjects for the construction of an artifact that allows
the visually impaired to orientate themselves in a determinated region e decrease the risks of
colision with some bulkhead.
Keywords: Eletronic Cane, Visually Impaired, Ultrasonic Sensor
LICENÇA
Este trabalho está licenciado sob uma Licença Creative Commons Atribuição-Uso NãoComercial-Compartilhamento pela mesma Licença 2.5 Brasil. Para ver uma cópia desta licença,
visite http://creativecommons.org/licenses/by-nc-sa/2.5/br/ ou envie uma carta para Creative
Commons, 171 Second Street, Suite 300, San Francisco, California 94105, USA.
LISTA DE FIGURAS
FIGURA 1
FIGURA 2
FIGURA 3
FIGURA 4
FIGURA 5
FIGURA 6
FIGURA 7
FIGURA 8
FIGURA 9
FIGURA 10
FIGURA 11
– DIAGRAMA DE BLOCOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– FUNCIONAMENTO DO SENSOR DE ULTRASSOM . . . . . . . . . . . . . . . .
– LV-MAXSONAR-EZ1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– DIAGRAMA ESQUEMÁTICO DO SENSOR . . . . . . . . . . . . . . . . . . . . . . . .
– TEMPORIZADOR 555 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– DIAGRAMA ESQUEMÁTICO DO TEMPORIZADOR 555 NO MODO
ASTÁVEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– CONFIGURAÇÃO DOS RESISTORES NO AMPLIFICADOR 741 . . . .
– AMPLIFICADOR 741 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– MOTOR VIBRATÓRIO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– MODULAÇÃO DA SAÍDA DO TEMPORIZADOR 555 . . . . . . . . . . . . . .
– DIAGRAMA COM O CIRCUITO DO PROJETO . . . . . . . . . . . . . . . . . . . . .
10
10
11
12
12
14
15
15
17
19
20
SUMÁRIO
LICENÇA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 JUSTIFICATIVA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 OBJETIVOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Objetivo Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Objetivos Especı́ficos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 FUNDAMENTAÇÃO TEÓRICA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 ONDAS SONORAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 ULTRASSOM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 DISPOSITIVOS UTILIZADOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 SENSOR DE ULTRASSOM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Caracterı́sticas do Sensor de Ultrassom Utilizado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 TEMPORIZADOR 555 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Terminais do CI 555 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.2 Configuração Astável . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 AMPLIFICADOR 741 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Modo de funcionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 RESISTORES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 CAPACITORES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6 TRANSISTORES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.7 MOTOR VIBRATÓRIO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 O PROJETO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 ORIENTAÇÃO PARA DEFICIENTES VISUAIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 O CIRCUITO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 O ARTEFATO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 CONSIDERAÇÕES FINAIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 CONCLUSÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
REFERÊNCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
iv
7
7
8
8
8
9
9
9
10
10
11
11
12
13
14
14
16
16
16
17
18
18
18
21
22
22
24
7
1
INTRODUÇÃO
Cegos são deficientes visuais que tiveram a perda total da visão e que necessitam de aparelhos como a bengala para a locomoção individual. Deste modo, após conhecer a ementa de Oficina de Integração II, a qual recomenda a criação de projetos baseados em sensores, decidiu-se a
criação de uma bengala eletrônica baseada em um sensor de ultrassom, para detectar obstáculos
e determinar as suas distâncias no percurso.
O projeto baseia-se em criar um circuito eletrônico ao invés da utilização de microprocessadores. Esta decisão foi tomada devido à preferência da equipe pela eletrônica, proporcionando
aprimoramento dos conhecimentos obtidos em outras diciplinas do curso de Engenharia de
Computação. A criação de um circuito eletrônico ao invés da programação de um software
para microprocessadores foi motivada para ser um diferencial em relação as outras bengalas
eletrônicas disponı́veis no mercado e apresentadas na internet, que na maioria, utilizam plataformas de hardware livre, como o Arduino(computador fı́sico baseado numa simples plataforma
de hardware livre).
1.1
JUSTIFICATIVA
Foi escolhido aplicar este projeto à trajetória de trabalho na disciplina de Oficina de Integração
II por abranger conhecimentos de interesse da equipe, como por exemplo a eletrônica. Além
disso, a escolha do projeto foi motivada pela necessidade de se conhecer mais sobre sensores,
que é um dos objetivos da disciplina.
A aplicação de um projeto que acarreta melhorias na qualidade de vida de um deficiente
visual também teve peso na hora da escolha do projeto, pois apesar de existir esse equipamento disponı́vel no mercado, seu custo é muito elevado(cerca de 300 reais) e torna-se difı́cil a
aquisição por parte dos deficientes.
8
1.2
OBJETIVOS
Aperfeiçoar os conhecimentos adquiridos no curso sobre circuitos elétricos e eletrônica, ou
seja, promover a integração entre os conhecimentos das disciplinas ministradas no curso. Obter
uma base de informações sólida sobre o sensor de ultrassom que será utilizado no desenvolvimento do projeto, permitindo a integração desse sensor com outros dispositivos que irão tratar
a saı́da do sinal recebido pelo sensor.
1.2.1
Objetivo Geral
A meta é construir um sistema em que se possa medir a distância de objetos entre 0,15m
a 6,45m através de um sensor ultassônico e dispositivos eletrônicos. E a partir destas medidas, proporcionar uma resposta que auxilie os deficientes visuais a identificarem a proximidade
de obstáculos.A resposta fornecida pelo sistema será feita através do tato, na forma de uma
frequência de vibrações que irá variar de acordo com a distância do obstáculo.
1.2.2
Objetivos Especı́ficos
• Aumentar os conhecimentos dos alunos sobre eletrônica e sobre o funcionamento do
sensor ultrassom.
• Elaboração de um circuito, que a partir das leituras do sensor possa informar ao deficiente
visual se este encontra-se próximo ou não de algum obstáculo.
• Criação de um sistema pequeno o suficiente para que possa ser carregado pelo deficiente
visual com pouco esforço.
9
2
2.1
FUNDAMENTAÇÃO TEÓRICA
ONDAS SONORAS
Ondas sonoras são ondas longitudinais de compressão e de rarefação que se propagam
em um determinado meio que pode ser lı́quido, sólido ou gasoso. São geradas através de
perturbações provenientes das vibrações ou interações moleculares. A velocidade de propagação
das ondas sonoras está intimamente ligada com propriedades do meio. E a velocidade v é dada
conforme a fórmula a seguir:
v=
q
B
ρ
Onde o B é o módulo da compressibilidade e ρ é a densidade do meio. (TIPLER, 1995)
2.2
ULTRASSOM
O som pode ser definido como uma onda de compressão ou rarefação, que proporciona a
vibração. Todos os sons produzem vibrações e todas as vibrações geram um som, sendo que,
a intensidade de uma vibração determina o seu alcance. O tempo que a vibração demora para
completar um ciclo de compressão e rarefação chamado de perı́odo e o inverso do perı́odo é
a frequência, expressa em Hertz(Hz), que é o número de ciclos por segundos. A sensibilidade
do ouvido humano proporciona a captação de frequências que vão, aproximadamente, de 20Hz
a 20000Hz. Devido a isso, as frequências que estão acima de 20.000 Hz são chamadas de
ultrassom.(TIPLER, 1995)
10
3
DISPOSITIVOS UTILIZADOS
Os dispositivos aqui descritos desempenham papel importante no artefato desenvolvido e
o seu funcionamento precisa ser explicado. A interação entre os principais blocos do sistema
pode ser encontrada na figura 1.
Figura 1: Diagrama de Blocos do Sistema.
3.1
SENSOR DE ULTRASSOM
O funcionamento do sensor baseia-se no envio de uma onda em alta frequência que ao se
deparar com um objeto é refletida. Quando a onda volta para o sensor, calculado o tempo
entre o sinal de emissão e de reflexão, e como a distância depende da velocidade de propagação
do som no ar (aproximadamente 340m/s) este tempo é medido e a distância calculada. Como
a onda passa duas vezes pelo mesmo caminho como se pode ver na figura 2, multiplica-se a
distância encontrada por 0,5, a fim, de considerar só a distância entre o sensor e o objeto.
Figura 2: Funcionamento do Sensor de Ultrassom.
11
3.1.1
Caracterı́sticas do Sensor de Ultrassom Utilizado
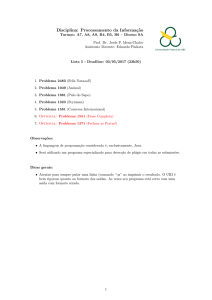
O sensor escolhido para o uso no projeto é o modelo LV-MaxSonar-EZ1 da MaxBotix (figura 3) , que tem como caracterı́sticas: tamanho reduzido(área da base próxima de 440mm2 e
uma altura de 16,4mm), detecta objetos de 6 à 254 polegadas de distância com resolução de uma
polegada. O sensor possui saı́da analógica, serial e largura de pulso (pulse width), e as leituras
podem ser de até 50ms (20kHz).Este sensor trabalha com tensões de 2,55 a 5,5 volts e corrente
de 2,0mA. Tem como vantagens o fato de possuir três saı́das para o seu usuário, fornecer o alcance de leitura diretamente, não necessitando então de um processador auxiliar.(MAXBOTIX,
2006)
(a) vista em perspectiva do sensor
(b) vista traseira do sensor
Figura 3: LV-MaxSonar-EZ1
Fonte: (MAXBOTIX, 2006)
O principal benefı́cio do sensor é o fornecimento, através da saı́da analógica, de uma tensão
de saı́da proporcional à distância encontrada, que varia 9.8mV/pol quando o sensor tem 5V em
sua alimentação.
3.2
TEMPORIZADOR 555
O temporizador 555 é circuito integrado que foi lançado em 1971, que a partir de uma
determinada configurção retorna uma frequência de pulsos como saı́da. Ele possui dois modos
de funcionamento: monoestável e astável. No primeiro modo produz atrasos de tempo muito
precisos que podem ir desde microssegundos a horas. No segundo, produz uma sequência de
pulsos com uma determinada frequência. Neste projeto o modo de funcionamento utilizado é o
astável, uma frequência de pulso variáveis quando uma tensão é aplicada sobre um determinado
12
Figura 4: diagrama esquemático do circuito interno do sensor
Fonte: (MAXBOTIX, 2006)
pino, assim podemos aplicar a tenso de saı́da do sensor e modificar a frequência de saı́da do
temporizador.
3.2.1
Terminais do CI 555
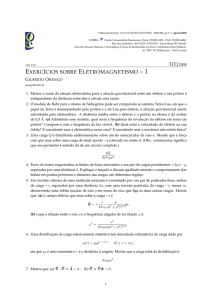
Os terminais do circuito estão dispostos conforme a figura 5:
Figura 5: Temporizador 555.
Fonte: (SEMICONDUCTOR, 2006)
• Terminal 1:GND, ground, a massa da fonte de alimentação, server como tensão de
referência para o temporizador.
• Terminal 2:Trigger, quando a tensão sobre este terminal for baixa, menos de
1
3
de Vcc,
desativa o terminal 7 e começa a carregar o capacitor novamente, fazendo com que a saı́da
do temporizador seja alta, aproximadamente Vcc.
13
• Terminal 3:Output, é o terminal de saı́da do temporizador, sua tensão de saı́da pode ser
tanto alta como baixa, sendo que a frequência que a saı́da varia entre essas duas tensões
é definida pela frequência em que o capacitor carrega e descarrega, sendo que quando
carrega sua tensão é aproximadamente Vcc e quando descarrega é aproximadamente 0V.
• Terminal 4:Reset, se este terminal receber tensão inferior a, aproximadamente, Vcc o
temporizador interrompe o ciclo de carga e descarga do capacitor, a saı́da do temporizador
se torna 0V.
• Terminal 5:Control, terminal de controle, aplicando uma tensão sobre este terminal é
possı́vel alterar o tempo de carga e descarga do capacitor, alterando assim a frequência de
saı́da do temporizador.
• Terminal 6:Threshold, quando a tensão sobre este terminal for alta, mais de
2
3
de Vcc,
ativa o terminal 7 e descarrega o capacitor, fazendo com que a saı́da do temporizador seja
baixa, aproximadamente 0V.
• Terminal 7:Discharge, terminal utilizado para descarregar o capacitor, o tempo de descarga é controlado pelos resistores e pelo capacitor, sendo que esse tempo pode ser alterado pelo terminal de controle.
• Terminal 8:Vcc, tensão positiva da fonte de alimentação, a tensão pode variar de 4,5V à
18V.(SEMICONDUCTOR, 2006)
3.2.2
Configuração Astável
A configuração astável como dito anteriormente permite o controle de uma sequência de
pulsos durante um certo perı́odo. A frequência de oscilação é dependente dos resistores Ra e Rb
e do capacitor C, conforme a figura 6.
A frequência de oscilação é dada pela seguinte equação:
fosc =
1, 44
(Ra + 2.Rb ).C
(1)
Consequentemente pode-se calcular o perı́odo de oscilação que é o inverso da frequência.
14
Figura 6: Diagrama esquemático do temporizador 555 no modo astável
Fonte: Adaptado de (SEMICONDUCTOR, 2006)
3.3
AMPLIFICADOR 741
O amplificador operacional é um circuito integrado cuja principal função, como o nome
já diz, ámplificar, ou seja, dado um determinado sinal de entrada no amplificador ,através das
configurações dos resistores periféricos, produz-se um sinal de saı́da com o ganho configurado
pelos resistores. Além dessa utilidade citada, há diversas outras.
3.3.1
Modo de funcionamento
O ganho promovido pelo amplificador operacional é controlado por dois resistores que
fazem parte de um circuito de realimentação negativa (Figura 7), que permite o retorno de parte
do sinal de saı́da para a entrada, limitando assim a amplificação do sinal e tornando o ganho
constante. O ganho do amplificador operacional é dado pela seguinte equação:
β = 1+
R1
R2
(2)
15
Figura 7: Configuração dos resistores no Amplificador 741
Fonte: (AMPLIFICADORES, )
Terminais do circuito integrado:
Figura 8: Terminais do Amplificador 741.
Fonte: (SEMICONDUCTOR, 2004)
• Terminal 1 e 5: Offset, terminais utilizados para eliminar ruı́dos.
• Terminal 2: Inverting Input, Entrada inversora (inverte a polaridade de sinal) do amplificador.
• Terminal 3: Non-Inverting Input, Entrada não inversora do amplificador.
• Terminal 4: V − , Tensão negativa de alimentação do amplificador, usada para alimentações
simétricas.
• Terminal 6: Output, Saı́da do sinal amplificado.
• Terminal 7: V + , Tensão positiva de alimentação do amplificador.
• Terminal 8: NC, Sem finalidade. (SEMICONDUCTOR, 2004)
Os resistores utilizados no projeto, a configuração e o ganho do amplificado serão apresentados posteriormente.
16
3.4
RESISTORES
O resistor é um componente amplamente utilizado na eletrônica e possui diversas aplicações
nesta área, por exemplo: provocar uma queda de tensão em uma determinada região de um circuito, provocar aquecimento para alguma finalidade, entre outras. O resistor tem como caracterı́stica ser um dispositivo linear e principalmente sofrer o efeito joule que transforma energia
elétrica em térmica. A unidade que mede o quanto um resistor se opõe a passagem de corrente
é a resistência e a sua unidade no S.I. é chamada de ohm (IRWIN, 2000). O intuito de se usar os
resistores neste projeto é o controle da frequência de oscilação do temporizador 555 e o controle
do ganho do amplificador 741.
3.5
CAPACITORES
O capacitor é um dispositivo de duas placas paralelas, separadas por um material não con-
dutor, capaz de armazenar energia de um circuito elétrico e mais tarde devolvê-la. O material
que não permite a passagem de corrente se chama dielétrico e devido à presença dele, ocorre
uma acumulação de cargas elétricas nas placas, de tal forma que a placa ligada ao pólo negativo
do capacitor acumula elétrons enquanto que a placa ligada ao pólo positivo do gerador perde
elétrons. Este fenômeno é chamado de Polarização do Dielétrico e é o responsável pela carga
e descarga do capacitor. Há diversos tipos de capacitores e a classificação deles depende do
tipo de material isolante utilizado. A grandeza que mede a capacidade de armazenamento de
um capacitor é a capacitância e a sua unidade de medida no S.I. é o Farad (IRWIN, 2000).
Assim como os resistores, o capacitor é utilizado no controle da frequência de oscilação do
temporizador 555.
3.6
TRANSISTORES
As principais funções de um transistor são o chaveamento de um circuito e amplificaçõ
(ganhos de tensão ou corrente, amplificaçõ de sinais).
O transistor é um dispositivo semicondutor no qual existe uma camada do tipo n (semicondutor banhado em impurezas doadoras), entre duas camadas do tipo p (semicondutor banhado
em impurezas aceitadoras), ou uma camada do tipo p entre duas do tipo n. Estas camadas são
extremamente pequenas e protegidas por uma cápsula plástica para protegê-las da umidade.
O chaveamento do transistor ocorre da seguinte forma, quando o transistor está desligado,
não existe carga elétrica na base, por isso, não existe corrente elétrica entre o emissor e o coletor,
17
já quando existe corrente na base o transistor permite a corrente elétrica entre emissor e coletor. A função do transistor no projeto é a de chaveamento. (BOYLESTAD, 1998)(MILMAN;
HALKIAS, 1981)
3.7
MOTOR VIBRATÓRIO
O motor vibratório (Figura9) é um dispositivo que se diferencia do motor convencional por
possuir um elemento de massa no eixo de rotação, este elemento é colocado de forma que o seu
centro de massa não coincida com o eixo de rotação o que provoca a desproporcionalidade de
forças e consequentemente a vibração no dispositivo. O motor utilizado no projeto foi retirado
de um controle do vı́deo game Playstation 2.
Figura 9: exemplo de um motor vibratório semelhante ao utilizado no projeto
O motor vibratório é utilizado como uma saı́da do dispositivo, de maneira que o deficiente
visual possa captar as vibrações e a partir dessas vibrações possa perceber a presença de um
obstáculo no caminho.
18
4
4.1
O PROJETO
ORIENTAÇÃO PARA DEFICIENTES VISUAIS
A problemática envolvida é que os deficientes visuais normalmente necessitam uma de-
pendência constante de ajuda para se locomoverem, por possuı́rem pouca ou nenhuma habilidade no campo visual. O desenvolvimento de um dispositivo que os auxilie nessa percepção
vem para evitar colisões com obstáculos e com isso melhorar perspectiva de mobilidade de um
deficiente visual.
No artigo “Óculos sonar para deficientes visuais”(GONZATO et al., ) foi desenvolvido um
projeto com este propósito utilizando o mesmo sensor de ultrassom utilizado nesse trabalho.
O óculos foi adaptado com um sensor e um fone de ouvido que emite um sinal sonoro que
seria um guia auditivo de distância para o usuário. Quanto mais próximo do obstáculo, maior
seria a frequência sonora emitida para o usuário, fornecendo um parâmetro de comparação para
diferentes distâncias. “O projeto permite às pessoas com dificuldade visual a identificação da
presença de obstáculos a mais de um metro de distância em situações onde uma bengala comum
não evitaria o choque frontal”(GONZATO et al., ).
Da mesma forma, o artefato que está sendo desenvolvido neste projeto possibilita a orientação
de um deficiente visual. Porém, o dispositivo é utilizado nas mãos e a saı́da para o usuário é um
sinal tátil na forma de vibrações. O dispositivo emite pulsos de vibração com perı́odos cada vez
menores, conforme o dispositivo se aproxima de um obstáculo.
4.2
O CIRCUITO
Essa seção tem como objetivo promover uma visão mais concreta do projeto que tem como
base a interconexão dos dispositivos apresentados anteriormente. A base do circuito começa
pelos ajustes do temporizador 555 que é o responsável por receber o sinal amplificado do sensor
e gerar uma saı́da de pulsos de tensão que irão controlar a frequência e o perı́odo de vibração
do motor, que é a saı́da para o usuário.
19
Para definir o perı́odo de vibração foi utilizado o modo astável (seção 3.2.2) do temporizador configurado pelos resistores de 4,7kΩ e 1kΩ e pelo capacitor de 1000µF. A frequência
base de oscilação é de 0,1384 Hz e um perı́odo de 7,22 segundos que é modulado pela tensão
proveniente do amplificador do sensor, que entra no terminal de controle do temporizador.
O sinal de saı́da do sensor foi amplificado com um 741 (amplificador operacional), pois não
fornecia tensão nem corrente suficientes para a entrada do temporizador. O ganho configurado
com os resistores (Figura 11) de 1kΩ foi de 3. Foi utilizado uma alimentação simétrica de 9V.
Com a amplificação da tensão do sensor que, conforme a distância cresce a tensão aumenta,
o temporizador gera uma saı́da que depende do sinal modulante (tensão amplificada do sensor).
Esta saı́da tem picos de amplitude com perı́odos mais longos e baixa amplitude com perı́odos
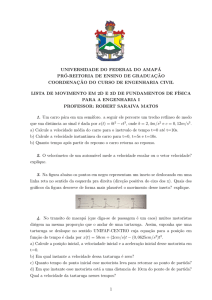
mais curtos quando a tensão modulante é alta, como mostra a figura 10:
Figura 10: modulação da saı́da do temporizador 555
Fonte: (SEMICONDUCTOR, 2006)
Então, como se pode ver,quando a tensão modulante é alta (sensor esta a uma distância
grande de um objeto), o intervalo em que o sinal fica em amplitude baixa é pequeno. Para gerar
uma saı́da diretamente proporcional à distância, ou seja, perı́odos de sinais de amplitude baixa
longos com distâncias grandes é necessário inverter o sinal de saı́da do temporizador. Para isso,
foi utilizada uma associação de dois transistores.
Com o complemento do sinal de saı́da do temporizador ligado ao motor, o motor fica parado
por mais tempo com distâncias grandes, e conforme a distância vai diminuindo, o tempo que o
motor fica parado também diminui. Para distâncias menores que 30cm é imperceptı́vel o tempo
em que o motor fica parado.
20
Figura 11: Diagrama com o circuito do projeto
21
4.3
O ARTEFATO
O circuito apresentado na seção anterior foi montado inicialmente em um protoboard para
facilitar os testes e as configurações que envolvem a troca constante de resistores, capacitores
e transistores. As alimentações das tensões eram feitas por fontes de tensão reguláveis. Após
alguns testes e depois de se verificar o funcionamento, o circuito foi transferido para uma placa
e a alimentação foi substituı́da por 4 pilhas AA em série que fornecem 6V, e 2 baterias de 9V
que fornecem a alimentação simétrica de 9V para o amplificador.
O motor vibratório que é o dispositivo que irá dar o parâmetro de distância para o usuário
foi acoplado em uma pulseira. Foi testado o tempo de autonomia do sistema para verificar a
viabilidade do projeto utilizando baterias e pilhas, para tal foi medido o consumo de corrente do
circuito trabalhando na máxima potência. Depois foi medido variando-se a distância no sensor.
O consumo de corrente do circuito foi cerca de 40mA com o motor vibrando no máximo, 32mA
trabalhando em um teste real e 10mA quando o motor encontrava-se parado. Em um dos testes,
o artefato foi deixado ligado com o motor vibratório em rotação máxima, o sistema funcionou
por mais de 2h sem desligar.
Apesar do projeto não ter sido testado com deficientes visuais, poucas melhorias na saı́da
para o usuário permitirão o uso sem problemas na interpretação das distâncias. Este problema
deve-se a uma saı́da que aumenta o tempo em que o motor fica parado conforme a distância
torna-se maior, esta saı́da se mostrou pouco precisa em alguns casos, assim é necessário um
refinamento nesta saı́da ou um melhor estudo de sua viabilidade e de formas alternativas de
saı́das.
22
5
5.1
CONSIDERAÇÕES FINAIS
CONCLUSÃO
O projeto promoveu o conhecimento de diversos dispositivos eletrônicos como o tempori-
zador 555 e o amplificador operacional 741 e, além disso, a fixação de novos conhecimentos
de eletrônica. A opção por um circuito eletrônico ao invés de um microprocessador foi interessante para uma experiência de projeto diferente da abordagem de Oficina de Integração I, que
em nosso caso foi a elaboração de um software.
Além dos conhecimentos de eletrônica adquiridos, o projeto permitiu a integração entre
várias disciplinas ministradas no curso e uma abordagem mais concreta sobre a viabilidade e o
desenvolvimento de um projeto que tem como objetivo auxiliar ou facilitar as dificuldades de
outro individuo.
O desenvolvimento do dispositivo também foi bastante satisfatório, pois foi possivel criar
um circuito eletrônico que que recebe informação de um sensor, processa essa informação e
retorna uma saı́da compreensı́vel para o usuário, e, sendo esse dispositivo puramente eletrônico,
foi possı́vel reduzir o seu tamanho significativamente, o que era um dos objetivos iniciais do
projeto.
Porém, a saı́da para o usuário ainda é insatisfatória e precisa ser melhor trabalhada, pois
falta um refinamento na saı́da para que o usuário possa dizer com maior precisão a distância
dos objetos e que saı́da responda mais rapidamente às mudanças que ocorrem com o sinal do
sensor, de maneira que o usuário não precise esperar para ter certeza de que há ,ou não, um
obstáculo à frente.
Outro aspecto do projeto que deixou a desejar foi a grande quantidade de pilhas e baterias
que foram utilizadas. É possı́vel modificar o projeto para que utilize uma quantidade menor de
pilhas e/ou baterias, porém, por falta de tempo, não foi possı́vel abordar profundamente este
aspecto do projeto. Esse fato prejudica o resultado final pois a portabilidade fica comprometida
diante da utilização dessa grande quantidade de pilhas e baterias, e esse úm dos principais
23
aspectos que deve ser trabalhado no projeto para garantir a sua viabilidade.
24
REFERÊNCIAS
AMPLIFICADORES. Disponı́vel em:
<http://www.centelhas.com.br/biblioteca/amplificadores.pdf>. Acesso em: 11 de
junho de 2010.
BOYLESTAD, R. L. Dispositivos eletrônicos e teoria de circuitos. [S.l.]: Editora
Prentice-Hall do Brasil Ltda., 1998.
GONZATO, A. et al. Óculos Sonar para deficientes visuais. [S.l.]: XIII Encontro Latino
Americano de Iniciação Cientı́fica e IX Encontro Latino Americano de Pós-Graduação da
Universidade do Vale do Paraı́ba.
IRWIN, J. D. Anaálise de Circuitos em Emgenharia. [S.l.]: Pearson Makron Books, 2000.
MAXBOTIX. EZ-MaxSonar-EZ1 DataSheet. 2006. Disponı́vel em:
<http://www.maxbotix.com/uploads/LV-MaxSonar-EZ1-Datasheet.pdf>. Acesso em:
15 de maio de 2010.
MILMAN, J.; HALKIAS, C. C. Eletrônica: dispositivos e circuitos. [S.l.]: McGraw-Hill do
Brasil, 1981.
SEMICONDUCTOR, N. LM741 DataSheet. 2004. Disponı́vel em:
<http://www.national.com/ds/LM/LM741.pdf>. Acesso em: 08 de junho de 2010.
SEMICONDUCTOR, N. LM555 DataSheet. 2006. Disponı́vel em:
<http://www.national.com/ds/LM/LM555.pdf>. Acesso em: 08 de junho de 2010.
TIPLER, P. A. Fı́sica para cientistas e engenheiros. [S.l.]: LTC - Livros Técnicos e
Cientı́ficos Editora, 1995.