UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
INSTRUMENTAÇÀO ELTRÔNICA
ANEMÔMETRO A FIO QUENTE
Cayo Cid de França Moraes
200321285
Natal/RN
ANEMÔMETRO A FIO QUENTE
INTRODUÇÃO
A medida da vazão é uma das medidas mais requeridas em um processo industrial, tanto
para realizar o acompanhamento do processo, quanto na determinação de quantidades
para fins de inventários contábeis ou comercialização. Os medidores de vazão empregam
vários tipos de elementos sensores e podem ser subdivididos em três grandes grupos que
são os medidores por área variável, medidores por perda de carga e medidores especiais.
Dentro da categoria de medidores especiais, estão medidores que operam principalmente
por fluxo magnético, por ultrasom, efeito coriolis, tipo vortex e por efeito térmico. Os
medidores por efeito térmico têm sido estudados principalmente na medida de velocidade
mássica atreves de anemômetros de fio quente (hot-wire) utilizando um sensor termoresistivo. Neste trabalho procurou desenvolver-se um medidor de vazão que permitisse
medir a vazão de ar em um duto fechado através do princípio de transferência térmica
utilizando um sensor termo resistivo.
O ANEMÔMETRO A FIO QUENTE
A anemometria de fio-quente (AFQ) constitui-se em um método de investigação pouco
intrusivo devido às pequenas dimensões do elemento sensível. O princípio de
funcionamento da AFQ remonta ao início do século XX. A AFQ é considerada uma técnica
simples, fácil de utilizar, e de baixo custo de aquisição e manutenção, o que se constitui em
uma de suas grandes vantagens. Basicamente, um anemômetro de fio-quente consiste de
um filamento aquecido que fica exposto ao escoamento de um fluido. Este filamento fica
conectado a um circuito eletrônico que e capaz de monitorar a sua variação de resistência
elétrica pela ação de escoamento. Pode-se, então, estabelecer uma relação de pertinência
entre a velocidade do escoamento e a resistência observada no filamento aquecido.
Princípios Básicos
Três são os principais tipos de transdutores térmicos utilizados em mecânica dos fluidos
experimental; eles se distinguem especialmente pelo método de controle da corrente
elétrica que passa pelo sensor. O mais difundido modo de operação e, sem duvida, o
anemômetro de temperatura constante, onde a corrente do sensor sofre variações de
acordo com a velocidade do fluido, de modo a manter a sua resistência e temperatura
constantes. Utilizado em menor escala esta o anemômetro de corrente constante. Como o
próprio nome sugere, a corrente da ponte é constante, permitindo que a temperatura e
resistência se alterem de acordo com a mudança da velocidade. De uso um pouco mais
restrito, o anemômetro de fio-quente pulsátil e uma solução engenhosa para quantificar
não só a direção da componente de velocidade, mas também o seu sentido.
Tipos de Sensores
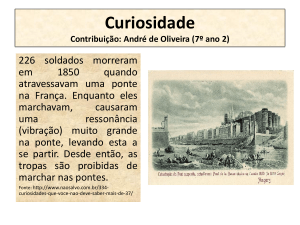
O sensor de fio quente é constituído de um corpo de material cerâmico, onde estão fixas
duas agulhas. O elemento sensível é em geral um fio de tungstênio de 5 𝜇𝑚 de diâmetro e
1,25 mm de comprimento, soldado à extremidade de cada agulha Existe uma grande
variedade de sensores dedicados a diferentes aplicações; elas divergem basicamente pelo
número de elementos sensíveis , pela posição das agulhas, e pelo tipo de material do fio ou
tipo de recobrimento. Alguns exemplos de sensores são ilustrados na Fig. 1.
Figura 1 – Tipos de sensores de fio quente
Leis de calibração
A calibração de um anemômetro normalmente consiste de medidas simultâneas da
velocidade U e da saída em voltagem do anemômetro V e a partir da relação voltagemvelocidade determinam-se as constantes de calibração.
Diversas técnicas são propostas na literatura para a calibração de sensores de
anemômetros de fio/filme quente em escoamento de fluidos à temperatura constante,
entretanto a mais bem sucedida delas todas é a baseada na Lei de King, a qual modela o
resfriamento de um fio aquecido eletricamente, convectando com o campo de fluido que
lhe passa normal, pela seguinte relação:
𝐸 2 = 𝐴 + 𝐵𝑈 𝑛
onde E é a queda de tensão no elemento sensor (neste estudo, a saída do instrumento), A e
B, coeficientes levantados pelas observações experimentais e n o expoente o qual
geralmente é atribuído o valor 0,5.
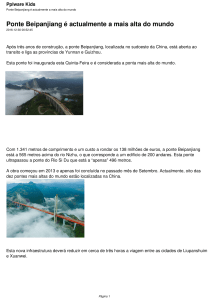
ANEMÔMETRO DE TEMPERATURA CONSTANTE (CTA)
Uma configuração típica da ponte CTA é apresentada na Fig. 2. Essencialmente, quatro
níveis compõem o sistema de compensação de temperatura:
1. A Ponte de Wheatstone, onde o estímulo sobre o sensor é transformado em um
sinal elétrico;
2. Um estágio de ganho, onde a diferença de tensão entre os dois braços da ponte é
amplificada;
3. Inserção de uma tensão de referência ou de sinal de teste;
4. Um estágio de potência, ode a corrente necessária para re-equllibrar a ponte é
gerada
Figura 2 – Componente do circuito de controle de uma ponte CTA
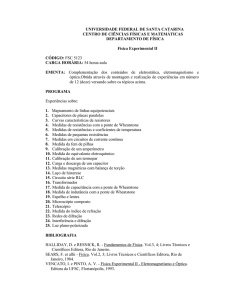
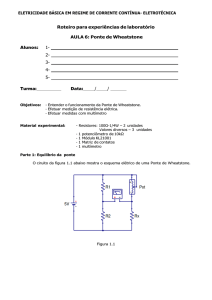
A primeira parte principal da anemometria térmica, a Ponte de Wheatstone, é composta
basicamente por quatro resistores, onde VP denota a fonte de tensão. Deve-se notar que a
PW pode ser alimentada em tensão ou em corrente. A Fig. 1 ilustra, por simplicidade,
apenas uma ponte alimentada em tensão. Neste texto, utilizamos por definição de
voltagem a diferença de potencial (tensão) avaliada em dois pontos do circuito, por
exemplo, a voltagem de desbalanceamento da ponte, ei é dada pela diferença entre os
potenciais dos nós A e B. O sinal de saída ei , que deve ser medido por algum dispositivo
com alta impedância de entrada, e é dado por:
Figura 3 – Diagrama de uma ponte de Wheatstone
A representação da PW por seu equivalente de Thévenin é útil em diversas situações. A
tensão de Thévenin é o próprio sinal de saída enquanto que a resistência é dada por:
R Th = (R1 //R 2 ) + (R 3 //R 4 )
A fonte VP , por outro lado, vê uma resistência equivalente vê uma resistência equivalente
igual a
𝑅𝑒𝑞 =
(R1 //R 2 ) + (R 3 //R 4 )
R1 + R 2 + R 3 + R 4
A potência 𝑃v e a corrente 𝐼p da ponte são dada por:
𝑃𝑣 =
VP 2
𝑅𝑒𝑞
𝐼𝑝 =
VP
𝑅𝑒𝑞
Dizemos que a ponte de Wheatstone está balanceada quando a voltagem ei se anula. A
análise do circuito mostra que isso só acontece quando
R 2 R 4 = R1 R 3
Outro fator importante, chamado de razão da ponte, determina a relação entre as
correntes que atravessam os braços da ponte quando ela está em equilíbrio. Este
parâmetro, A, é obtido através das seguintes razões:
𝐴=
R2 R3
=
R1 R 4
Quando ambas as resistências do topo da ponte forem iguais, ou seja, R1 = R 2 , dizemos
que a ponte tem razão 1:1.
O princípio de medição da anemometria térmica pressupõe que o sinal de saída ei é
decorrente da variação de somente um dos resistores da ponte, o sensor de fio-quente.
Assim, os três outros resistores têm de manter o seu valor nominal durante o curso da
medição. Em caso contrário, a tensão de desbalanceamento ei não é originada unicamente
pela variação de resistência do sensor de fio-quente, e, portanto, os resultados de
velocidade não corresponderão ao fenômeno sob investigação.
Inicialmente, quando a ponte está balanceada, nenhuma voltagem é lida entre os extremos
da ponte, i.e. ei = 0. Qualquer variação do escoamento no ponto onde o sensor está exposto
irá influenciar a temperatura do sensor, causando um resfriamento ou aquecimento a
medida em que a velocidade aumenta ou diminui. A resistência resultante da variação de
temperatura provoca o surgimento de uma voltagem ei entre os dois braços da ponte, que
é então enviada a um amplificador de ganho total K. A saída desse amplificador é aplicada
ao topo da ponte de tal modo que a temperatura original seja recuperada através do
aumento ou diminuição da corrente que passa pelo sensor. Dizemos, então, que esse
sistema opera em malha fechada, pois o sinal que alimenta a ponte é função da tensão de
desbalanceamento.
Logo, podemos inferir que projetar sistemas de AFQ reside em desenvolver um sistema de
controle em malha fechada capaz de responder de modo estável e operar em ciclos de
compensação de alta freqüência.
Para alcançar estabilidade e alta resposta em freqüência, na prática, as pontes CTA
utilizam diferentes componentes, como:
Dois ou mais amplificadores em série;
Controlador do nível de tensão DC (offset de voltagem);
Fonte ou amplificador de corrente para alimentação da ponte de Wheatstone;
Indutâncias para ajuste da resposta em freqüência.
O estágio de ganho é normalmente formado por dois amplificadores, um de ganho fixo e
outro de ganho variável. A voltagem VA − VB gerada na PW é encaminhada diretamente
para um amplificador diferencial ou, preferencialmente, um amplificador de
instrumentação. Uma ilustração deste componente é apresentada na Fig. 4, onde 𝑅𝐺
denota o resistor que define o ganho deste primeiro estágio de amplificação.
Figura 4 – Diagrama do amplificador de instrumentação da ponte CTA
Para que o circuito funcione em malha fechada com realimentação positiva (𝑒0 > 0 na Fig.
2), o nó A deve ser conectado à entrada não-inversora do amplificador, enquanto que o nó
B deve ser ligado à entrada inversora, que correspondem, respectivamente, aos sinais + e
− da Fig. 4.
Acoplados ao sinal de saída da ponte existem, no entanto, ruídos provenientes na maioria
das vezes de emissões eletromagnéticas de radiofreqüência. Estas componentes devem ser
eliminadas, pois serão amplificadas pelos estágios seguintes e poderão ser confundidas
com o conteúdo de altas freqüências de escoamentos turbulentos. Neste caso recomendase a inclusão de um filtro passa-baixa à entrada do amplificador de instrumentação, como
mostrado na Fig. 4. Para o filtro RC mostrado, a freqüência de canto é calculada como:
𝑓=
1
𝐶
4𝜋𝑅 𝐶2 + 21
,
onde 𝐶2 ≫ 𝐶1 pois diferenças entre os dois capacitores 𝐶1 que sinais de modo comum de
alta freqüência sejam convertidos em sinais diferenciais.
Usualmente, um amplificador adicional de ganho variável também está presente no
circuito, de modo a permitir o ajuste da resposta em freqüência.
Um terceiro estágio, ilustrado na Fig. 5, é utilizado para fornecer ao circuito uma tensão de
referência ES (offset), permitindo assim o controle do nível médio de tensão DC. Essa
tensão de referência deve ser ajustada para gerar uma voltagem mínima de saída da CTA
quando não há diferença de tensão entre os braços da ponte de Wheatstone.
Normalmente, um sinal de teste é conectado em serie com a tensão de offset e adicionado
proveniente do fio quente através de um circuito integrador somador.
Figura 5 – Diagrama da adição de um sinal de teste ao circuito CTA
Para garantir que haja corrente elétrica suficiente na entrada da ponte de Wheatstone, de
forma a manter a temperatura do sensor constante mesmo para condições de alta
velocidade, o sistema CTA possui um estágio de potência conectado à PW. Uma
implementação possível é apresentada na Fig. 6. Este último estágio é em geral um CI do
tipo seguidor com capacidade de corrente dada pelo transistor.
Figura 6 – Estágio de potência da ponte CTA
Antes de o sistema CTA ser colocado em operação, um resistor variável deve ser ajustado
em um valor maior que o necessário para balancear a ponte com o sensor à temperatura
ambiente. Como foi visto na seção anterior, quando o sistema CTA é ligado, sem a presença
de escoamento, o circuito de controle aumenta a corrente no topo da ponte de
Wheatstone, elevando a temperatura e a resistência do sensor até que a ponte esteja
balanceada. Logo, a temperatura de operação do sensor e a condição de equilíbrio da CTA
são determinadas pelo resistor variável.
A taxa de sobreaquecimento tem, pois, a função de guiar o cálculo apropriado do valor que
o resistor variável deve assumir. Definida como a razão entre a resistência do fio aquecido
RF e a resistência do fio à temperatura ambiente R0, a taxa de sobreaquecimento a é dada
por:
𝑅𝐹
= 1 + 𝛼0 (𝑇𝐹 + 𝑇0 )
𝑅0
𝛼0 = 𝐶𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑡é𝑟𝑚𝑖𝑐𝑜 𝑑𝑒 𝑟𝑒𝑠𝑖𝑠𝑡𝑖𝑣𝑖𝑑𝑎𝑑𝑒
𝛼=
Logo, a temperatura de operação do fio 𝑇𝐹 , pode ser estimada pela equação abaixo, onde o
índice 0 representa a grandeza avaliada na temperatura ambiente.
𝑅𝐹 = 𝑅0 [1 + 𝛼0 𝑇𝐹 + 𝑇0 ]
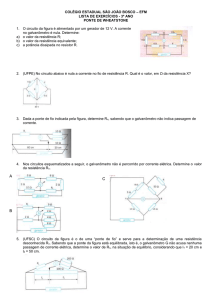
Para calcular o valor do resistor variável, precisamos antes estimar todas as resistências
adicionais envolvidas no sistema, como a resistência do cabo que liga o sensor à ponte, a
resistência do suporte do sensor, e a resistência das agulhas do corpo do sensor. A Fig. 7
ilustra uma configuração típica para medição com AFQ.
Figura 7 – Ilustração das resistências envolvidas no cálculo da resistência de operação do
fio-quente
Para medir a resistência do caminho que liga o fio-quente à ponte CTA devemos utilizar
um sensor de curto-circuito colocado no lugar do sensor de fio-quente. O sensor de curtocircuito é semelhante ao de fio-quente, porém com uma ligação direta entre as duas
agulhas. Isso permite então medirmos de uma só vez as resistências das agulhas, do
suporte e do cabo. Chamaremos esse valor de Rcc, que normalmente é da ordem de 1.6Ω.
Agora, devemos substituir o sensor de curto-circuito pelo sensor de fio-quente, e medir
novamente a resistência. Esse valor será então a resistência do caminho em adição à
resistência do fio, e será chamado de resistência total Rtot. Portanto, para conhecermos a
resistência do elemento sensível à temperatura ambiente basta subtrair deste valor a
resistência do caminho, i.e. R0 = Rtot−Rcc. Logo, utilizando uma taxa de sobreaquecimento de
1.8 (taxa de sobreaquecimento recomendada para sensores de tungstênio), temos que a
resistência de operação do fio será 𝑅𝐹 = 𝛼𝑅0 .
REFERÊNCIAS BIBLIOGRÁFICAS
[1] FREIRE Atila P. Silva; Ilha Anderson; Colaço Marcelo J. Turbulência, Volume 5, Tomo 1.
2006. 5a Escola de Primavera em Transição e Turbulência, Rio de Janeiro, 2006.
.