Projeções Cartográficas
Todos os mapas são representações aproximadas da superfície
terrestre. São aproximadas porque a Terra, esférica, é
desenhada em uma superfície plana.
A elaboração de uma mapa consiste em um método segundo o
qual se faz corresponder a cada ponto da Terra, em
coordenadas geográficas, um ponto no mapa, em coordenadas
planas. Para se obter essa correspondência utilizam-se os
sistemas de projeções cartográficas.
Existem diferentes projeções cartográficas, uma vez que há
uma variedade de modos de projetar sobre um plano os objetos
geográficos que caracterizam a superfície terrestre.
Conseqüentemente, torna-se necessário classificá-las sob seus
diversos aspectos, a fim de melhor estudá-las.
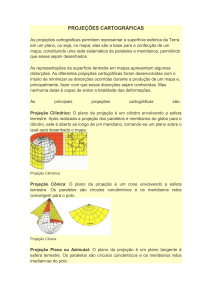
Classificação das Projeções
Analisam-se os sistemas de projeções cartográficas pelo tipo de
superfície adotada e grau de deformação.
Quanto ao tipo de superfície de projeção adotada, classificamse as projeções em: planas ou azimutais, cilíndricas e cônicas,
segundo se represente a superfície curva da Terra sobre um
plano, um cilindro ou um cone tangente ou secante à esfera
terrestre.
Um dos métodos de construir mapas é projetar tudo aquilo que está na superfície esférica da Terra sobre a
superfície plana do cilindro e, depois, abrir esse cilindro
Projeção cartográfica é a representação de uma superfície esférica (a Terra) num
plano (o mapa), ou seja, trata-se de um "sistema plano de meridianos e paralelos
sobre os quais pode ser desenhado um mapa" (Erwin Raisz. Cartografia geral. P.
58).
O grande problema da cartografia consiste em ter de representar uma superfície
esférica num plano, pois, como é sabido, a esfera é um sólido não- desenvolvível, isto
é, não-achatável ou não planificável. Assim, sempre que achatarmos uma esfera,
necessariamente ela sofrerá alterações ou deformações.
Experimente, por exemplo, cortar uma laranja ao meio e depois pressionar (achatar)
uma dessas partes sobre uma superfície plana.
Isso quer dizer que todas as projeções apresentam deformações, que podem ser em
relação às distâncias, às áreas ou aos ângulos. Assim, cabe ao cartógrafo escolher o
tipo de projeção que melhor atenda aos objetivos do mapa.
A maior parte das projeções hoje existentes deriva dos três tipos ou métodos
originais, a saber: cilíndricas, cônicas e planas ou azimutais.
1
Superfícies de Projeção
desenvolvidas em um plano.
No cilindro que se abre, ficam então projetados todos os oceanos, mares e continentes da
superfície da Terra.
Assim, toda a superfície esférica da Terra fica projetada na superfície plana do cilindro.
Por esse motivo, esta maneira de construir mapas é chamada de projeção cilíndrica
2
Esta projeção cilíndrica é chamada Projeção Mercartor.
Os mapas construídos quando se usa este tipo de projeção têm características que
os tornam úteis para fazer a navegação no mar.
Projeção de Mercátor
Idealizada no século XVI, a projeção cilíndrica de Mercátor tornouse a preferida dos navegantes por ser a única em que as direções
podiam ser traçadas em linha reta sobre o mapa.
Nessa projeção, os paralelos e os meridianos são linhas retas que
se cruzam formando ângulos retos. Pertence ao tipo chamado
conforme, porque não deforma os ângulos. Em compensação, as
áreas extensas ou situadas em latitudes elevadas aparecem nos
mapas com dimensões exageradamente ampliadas.
3
A projeção cônica resulta da projeção do globo terrestre sobre um cone, que
posteriormente é planificado. Esse tipo de projeção:
•apresenta paralelos circulares e meridianos radiais, isto é, retas que se originam
de um único ponto;
é usado principalmente para a representação de países ou regiões de latitudes
intermediárias, embora possa ser utilizado para outras latitudes.
4
A projeção azimutal resulta da projeção da superfície terrestre sobre um plano a
partir de um determinado ponto (ponto de vista).
De acordo com Erwin Raisz (famoso cartógrafo americano), as projeções
azimutais são de três tipos: polar, equatorial e oblíqua. Elas são utilizadas para
confeccionar mapas especiais, principalmente os náuticos e aeronáuticos.
Projeção plana
Projeção cônica
Projeção cilíndrica
5
QUANTO À SUPERFÍCIE DE PROJEÇÃO
a)
Planas - este tipo de superfície pode assumir três posições básicas em relação a
superfície de referência: polar, equatorial e oblíqua (ou horizontal)
b) Cônicas - embora esta não seja uma superfície plana, já que a superfície de
projeção é o cone, ela pode ser desenvolvida em um plano sem que haja distorções
(Figura 2.5), e funciona como superfície auxiliar na obtenção de uma
representação. A sua posição em relação à superfície de referência pode ser:
normal, transversal e oblíqua (ou horizontal)
c) Cilíndricas - tal qual a superfície cônica, a superfície de projeção que utiliza o
cilindro pode ser desenvolvida em um plano (Figura 2.5) e suas possíveis posições
em relação a superfície de referência podem ser: equatorial, transversal e oblíqua
(ou horizontal)
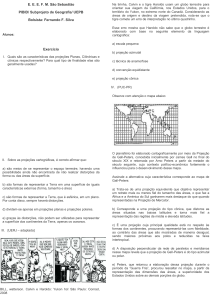
QUANTO AO TIPO DE CONTATO ENTRE AS SUPERFÍCIES DE PROJEÇÃO E
REFERÊNCIA
a) Tangentes - a superfície de projeção é tangente à de referência (plano- um
ponto; cone e cilindro- uma linha).
b) Secantes - a superfície de projeção secciona a superfície de referência
(plano- uma linha; cone- duas linhas desiguais; cilindro- duas linhas iguais)
(Figura 2.6).
Através da composição das diferentes características apresentadas nesta
classificação das projeções cartográficas, podemos especificar representações
cartográficas cujas propriedades atendam as nossas necessidades em cada caso
específico.
Superfícies de projeção secantes
6
- QUANTO ÀS PROPRIEDADES
Na impossibilidade de se desenvolver uma superfície esférica ou elipsóidica sobre um
plano sem deformações, na prática, buscam-se projeções tais que permitam diminuir ou
eliminar parte das deformações conforme a aplicação desejada. Assim, destacam-se:
a) Eqüidistantes - As que não apresentam deformações lineares para algumas linhas em
especial, isto é, os comprimentos são representados em escala uniforme.
b) Conformes - Representam sem deformação, todos os ângulos em torno de quaisquer
pontos, e decorrentes dessa propriedade, não deformam pequenas regiões.
c) Equivalentes - Têm a propriedade de não alterarem as áreas, conservando assim,
uma relação constante com as suas correspondentes na superfície da Terra. Seja qual for
a porção representada num mapa, ela conserva a mesma relação com a área de todo o
mapa.
d) Afiláticas - Não possui nenhuma das propriedades dos outros tipos, isto é,
equivalência, conformidade e eqüidistância, ou seja, as projeções em que as áreas, os
ângulos e os comprimentos não são conservados.
As propriedades acima descritas são básicas e mutuamente exclusivas. Elas ressaltam
mais uma vez que não existe uma representação ideal, mas apenas a melhor
representação para um determinado propósito.
Quanto às propriedades
Projeção Conforme
Projeção em que a forma de figuras da superfície cartográfica e os ângulos em torno de
pontos são corretamente representados.
Projeção Eqüidistante
Projeção cartográfica em que a escala real é conservada ao longo de certas linhas. Uma
Projeção é azimutal eqüidistante quando as distâncias são conservadas ao longo dos círculos
máximos que passam pelo centro; eqüidistante meridiana, quando a distância é conservada
ao longo dos meridianos; e eqüidistante transversal, quando a distância é conservada ao
longo dos paralelos.
Projeção Equivalente
Projeção cartográfica em que a proporção das áreas de todos os objetos representados é
conservada, ou seja, em que o módulo de deformação areal é constante e igual à unidade
7
PROJEÇÃO POLICÔNICA
- Superfície de representação: diversos cones
- Não é conforme nem equivalente (só tem essas características próxima ao
Meridiano Central).
- O Meridiano Central e o Equador são as únicas retas da projeção. O MC é dividido
em partes iguais pelos paralelos e não apresenta deformações.
- Os paralelos são círculos não concêntricos (cada cone tem seu próprio ápice) e não
apresentam deformações.
- Os meridianos são curvas que cortam os paralelos em partes iguais.
- Pequena deformação próxima ao centro do sistema, mas aumenta rapidamente
para a periferia.
- Aplicações: Apropriada para uso em países ou regiões de extensão
predominantemente Norte-Sul e reduzida extensão Este-Oeste.
É muito popular devido à simplicidade de seu cálculo pois existem tabelas
completas para sua construção.
É amplamente utilizada nos EUA.
No BRASIL é utilizada em mapas da série Brasil, regionais, estaduais e temáticos
PROJEÇÃO CÔNICA NORMAL DE LAMBERT (com dois paralelos padrão)
- Cônica.
- Conforme.
- Analítica.
- Secante.
- Os meridianos são linhas retas convergentes.
- Os paralelos são círculos concêntricos com centro no ponto de interseção dos meridianos.
- Aplicações: A existência de duas linhas de contato com a superfície (dois paralelos padrão)
nos fornece uma área maior com um baixo nível de deformação. Isto faz com que esta
projeção seja bastante útil para regiões que se estendam na direção este-oeste, porém pode
ser utilizada em quaisquer latitudes.
A partir de 1962, foi adotada para a Carta Internacional do Mundo, ao Milionésimo.
Projeção Cônica Normal de Lambert (com dois paralelos-padrão)
8
PROJEÇÃO CILÍNDRICA TRANSVERSA DE MERCATOR (Tangente)
- Cilíndrica.
- Conforme.
- Analítica.
- Tangente (a um meridiano).
- Os meridianos e paralelos não são linhas retas, com exceção do meridiano de tangência e do
Equador.
- Aplicações: Indicada para regiões onde há predominância na extensão Norte-Sul. É muito
utilizada em cartas destinadas à navegação.
Projeção Cilíndrica Transversa de Mercartor
Projeções de Mollweide e Aitoff
Essas projeções são do tipo equivalente, isto é, conservam a proporção
ou equivalência das áreas representadas em detrimento da forma.
Nelas, os paralelos são horizontais e estão de tal modo espaçados que
cada área limitadas por dois deles conserva a mesma proporção da área
real, embora possa variar muito no tocante à forma. Elas têm formato
elíptico e são muito utilizadas para a confecção de mapas-múndi.
9
P r o je çã o
C la s sific a ç ã o
A lb e rs
C ô n ic a
E q u iv a le n te
B ip o la r
C ô n ic a
C o n fo rm e
C ilín d ric a
E q u id is ta n te
C ilín d ric a
E q u id is ta n te
G au ss
C ilín d ric a
C o n fo rm e
E s te re o g rá fic a
P o la r
P la n a
C o n fo rm e
L a m b e rt
C ô n ic a
C o n fo rm e
L a m b e rt
M illio n
C ô n ic a
C o n fo rm e
M e rc a to r
C ilín d ric a
C o n fo rm e
M ille r
C ilín d ric a
N o _ P ro je c tio n
P la n a
P o lic ô n ic a
C ô n ic a
A p lic a ç õ e s
M a p e a m e n to s te m á tic o s . S e rv e
p a ra m a p e a r á re a s c o m e x te n sã o
p re d o m in a n te le ste -o e s te .
In d ic a d a p a ra b a se c a rto g rá fic a
c o n fiá v e l d o s c o n tin e n te s
a m e ric a n o s .
M a p a s M u n d i.
M a p a s e m e sc a la s p e q u e n a s.
T ra b a lh o s c o m p u ta c io n a is.
C a rta s to p o g rá fic a s a n tig a s.
M a p e a m e n to b á s ic o e m e s c a la
m é d ia e g ra n d e .
M
M
M
C
C
C
a p e a m e n to d
a p e a m e n to d
e rc ú rio .
a rta s g e ra is e
a rta s m ilita re
a rta s a e ro n á u
a s re g iõ e s p o la re s.
a L u a , M a rte e
g e o g rá fic a s .
s.
tic a s d o m u n d o .
C a rta s a o m ilio n é s im o .
A lte ra á re a s .
A lte ra â n g u lo s .
A lte ra á re a s (m a s a s
d is to rç õ e s n ã o
u ltr a p a s s a m 0 ,5 % ) .
P re s e rv a â n g u lo s .
S im ila r à U T M c o m
d e fa sag e m d e 3 d e
lo n g itu d e e n tre o s
m e rid ia n o s c e n tra is.
P re s e rv a â n g u lo s .
O fe re c e d isto rç õ e s d e
e s c a la .
P re s e rv a â n g u lo s .
P re s e rv a â n g u lo s .
C a rta s n á u tic a s .
C a rta s g e o ló g ic a s e m a g n é tic a s.
M a p a s M u n d i.
M a p a s M u n d i.
M a p a s e m e sc a la s p e q u e n a s.
A rm a z e n a m e n to d e d a d o s q u e
n ã o s e e n c o n tra m v in c u la d o s a
q u a lq u e r sis te m a d e p ro je ç ã o
c o n v e n c io n a l (d e se n h o s , p la n ta s,
im a g e n s b ru ta s o u n ã o
g e o re f e re n c ia d a s , e tc .).
M a p e a m e n to te m á tic o e m
p e q u e n a s.
C a r a c te r ís tic a s
P re se rv a á re a s.
S u b s titu i c o m
v a n ta g e n s to d a s a s
o u tra s c ô n ic a s
e q u iv a le n te s .
P re s e rv a â n g u lo s .
É u m a a d a p ta ç ã o d a
C ô n ic a d e L a m b e rt.
e sc a la s
P re s e rv a â n g u lo s .
A lte ra â n g u lo s .
A lte ra á re a s .
S iste m a lo c a l d e
c o o rd e n a d a s p la n a s .
A lte ra á re a s e
â n g u lo s.
S u b s titu íd a p e la
C ô n ic a C o n fo rm e d e
Projeção UTM - Universal Transversa de Mercator
O mapeamento sistemático do Brasil é feito na projeção UTM (1:250 000,
1:100 000, 1:50 000). Relacionam-se, a seguir, suas principais
características:
•
•
•
•
•
a superfície de projeção é um cilindro transverso e a projeção é conforme;
o meridiano central da região de interesse, o equador e os meridianos situados a 90o do meridiano
central são representados por retas;
os outros meridianos e os paralelos são curvas complexas;
a escala aumenta com a distância em relação ao meridiano central. A 90o deste, a escala torna-se
infinita;
a Terra é dividida em 60 fusos ou zonas de 6o de longitude. O cilindro transverso adotado como
superfície de projeção assume 60 posições diferentes, já que seu eixo mantém-se sempre
perpendicular ao meridiano central de cada fuso ou zona;
•
aplica-se ao meridiano central de cada fuso ou zona um fator de redução de escala igual a 0,9996,
para minimizar as variações de escala dentro do fuso ou zona. Como conseqüência, existem duas
linhas aproximadamente retas, uma a leste e outra a oeste, distantes cerca de 1o 37' do meridiano
central, representadas em verdadeira grandeza;
•
apesar da característica "universal" de projeção, enfatiza-se que o elipsóide de referência varia
em função da região da superfície terrestre.
10
PROJEÇÃO CILÍNDRICA TRANSVERSA DE MERCATOR (Secante)
- Cilíndrica.
- Conforme.
- Secante.
- Só o Meridiano Central e o Equador são linhas retas.
- Projeção utilizada no SISTEMA UTM - Universal Transversa de Mercator
desenvolvido durante a 2ª Guerra Mundial. Este sistema é, em essência, uma
modificação da Projeção Cilíndrica Transversa de Mercator.
1) O mundo é dividido em 60 fusos, onde cada um se estende por 6º de longitude. Os fusos são
numerados de um a sessenta começando no fuso 180º a 174º W Gr. e continuando para este. Cada
um destes fusos é gerado a partir de uma rotação do cilindro de forma que o meridiano de
tangência divide o fuso em duas partes iguais de 3º de amplitude (Figura 2.11).
2) O quadriculado UTM está associado ao sistema de coordenadas plano-retangulares, tal que um
eixo coincide com a projeção do Meridiano Central do fuso (eixo N apontando para Norte) e o outro
eixo, com o do Equador. Assim cada ponto do elipsóide de referência (descrito por latitude,
longitude) estará biunivocamente associado ao terno de valores Meridiano Central, coordenada E e
coordenada N.
3) Avaliando-se a deformação de escala em um fuso UTM (tangente), pode-se verificar que o fator
de escala é igual a 1(um) no meridiano central e aproximadamente igual a 1.0015 (1/666) nos
extremos do fuso. Desta forma, atribuindo-se a um fator de escala k = 0,9996 ao meridiano central
do sistema UTM (o que faz com que o cilindro tangente se torne secante), torna-se possível
assegurar um padrão mais favorável de deformação em escala ao longo do fuso. O erro de escala
fica limitado a 1/2.500 no meridiano central, e a 1/1030 nos extremos do fuso (Figura 2.12).
4) A cada fuso associamos um sistema cartesiano métrico de referência, atribuindo à origem do
sistema (interseção da linha do Equador com o meridiano central) as coordenadas 500.000 m, para
contagem de coordenadas ao longo do Equador, e 10.000.000 m ou 0 (zero) m, para contagem de
coordenadas ao longo do meridiano central, para os hemisfério sul e norte respectivamente. Isto
elimina a possibilidade de ocorrência de valores negativos de coordenadas.
5) Cada fuso deve ser prolongado até 30' sobre os fusos adjacentes criando-se assim uma área de
superposição de 1º de largura. Esta área de superposição serve para facilitar o trabalho de campo
em certas atividades.
6) O sistema UTM é usado entre as latitudes 84º N e 80º S.
Além desses paralelos a projeção adotada mundialmente é a Estereográfica Polar Universal.
11
L o n g itu d e e L a t itu d e d e O r ig e m
Q u a lq u e r s i s t e m a d e p r o je ç ã o c a r t o g r á fic a t e m u m a
o r i g e m e u m p a r d e e ix o s c a r te s i a n o s , (X ,Y ) o u (E ,N ) , q u e
sã o u sa d o s p a r a r e p re se n ta r a s co o r d e n a d a s p la n a s d a
p r o je ç ã o . P a r a t a n to , a o r i g e m é d e fi n id a n a i n te r s e ç ã o
d e u m p a r a le lo c o m u m m e r i d ia n o . A ta n g e n te a o
m e r id ia n o n a o r ig e m d e f in e o e i x o Y o u N e a ta n g e n te a o
p a r a le l o n a o r ig e m d e fi n e o e ix o X o u E .
A d e fi n iç ã o d e l o n g i tu d e d e o r ig e m d e p e n d e d a p r o je ç ã o
u t il iz a d a p e l o u s u á r io .
•
N a p r o j e ç ã o U T M a lo n g itu d e d e o rig e m c o r re s p o n d e a o m e r id ia n o c e n tra l d e u m f u s o o u z o n a (a
c ad a 6 o d e f in e -s e u m f u s o ), o u s e ja , a o m e r id ia n o c e n tra l d e u m a c a rta a o m ilio n é s im o .
A f ig u ra a s e g u ir a p re s e n ta a d is trib uiç ã o d a s c a rta s 1 : 1 .0 0 0 .0 0 0 p ar a o B r as il.
Norte da Quadrícula - Com direção paralela ao eixo N (que coincide com o Meridiano Central do fuso) do
Sistema de Projeção UTM no ponto considerado e apontado para o Norte (sentido positivo de N)
Convergência Meridiana Plana ( g ): É o ângulo form ado entre os vetores Norte Verdadeiro e o Norte da
Quadrícula associado a um ponto.
No sistem a UTM , a Convergência M eridiana Plana cresce com a latitude e com o afastamento do
Meridiano Central (M C).
No hem isfério Norte ela é positiva a Este do M C e negativa a Oeste do MC.
No hem isfério Sul ela é negativa a Este do M C e positiva a Oeste do MC.
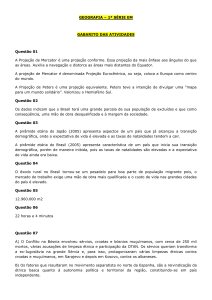
OBS: O Território Brasileiro é coberto por 08 (oito) fusos. (Figura 2.14)
12
Figura 2.14 - O Brasil dividido em fusos de 6º
Para saber a longitude de origem, o usuário deve localizar a área de interesse na figura e verificar a que fuso ou zona
ela pertence. O meridiano central corresponderá à longitude de origem.
Leme, por exemplo, situada a 22o S e 47o W, encontra-se no fuso de 42o a 48o W. Logo, sua longitude de origem é 45o
W.
Outra possibilidade é usar a equação MC = -183 + 6Z, onde MC é o meridiano central e Z é um número inteiro que
representa a zona ou fuso UTM.
13
6 - MAPA ÍNDICE
Além do índice de nomenclatura, dispomos também de um outro sistema de localização de folhas.
Neste sistema numeramos as folhas de modo a referenciá-las através de um simples número, de
acordo com as escalas. Assim:
- para as folhas de 1:1.000.000 usamos uma numeração de 1 a 46;
- para as folhas de 1:250.000 usamos uma numeração de 1 a 550;
- para as folhas de 1:100.000, temos 1 a 3036;
Estes números são conhecidos como "MI" que quer dizer número correspondente no MAPA-ÍNDICE.
O número MI substitui a conFigura ção do índice de nomenclatura para escalas de 1:100.000, por
exemplo, à folha SD-23-Y-C-IV corresponderá o número MI 2215.
Para as folhas na escala 1:50.000, o número MI vem acompanhado do número (1,2,3 ou 4)
conforme a situação da folha em relação a folha 1:100.000 que a contém. Por exemplo, à folha SD23-Y-C-IV-3 corresponderá o número MI 2215-3.
Para as folhas de 1:25.000 acrescenta-se o indicador (NO,NE,SO e SE) conforme a situação da folha
em relação a folha 1:50.000 que a contém, por exemplo, à folha SD-23-Y-C-IV-3-NO corresponderá
o número MI 2215-3-NO.
A aparição do número MI no canto superior direito das folhas topográficas sistemáticas nas escalas 1:100.000,
1:50.000 e 1:25.000 é norma cartográfica hoje em vigor, conforme recomendam as folhas-modelo publicadas
pela Diretoria de Serviço Geográfico do Exército, órgão responsável pelo estabelecimento de Normas Técnicas
para as séries de cartas gerais, das escalas 1:250.000 e maiores.
14