CORREÇÃO GEOMÉTRICA DE
IMAGENS DIGITAIS
AULA 10
Prof. Daniel C. Zanotta
Daniel C. Zanotta
15/05/2017
CORREÇÃO GEOMÉTRICA
IMPORTÂNCIA
ELIMINAÇÃO DE DISTORÇÕES SISTEMÁTICAS;
INTEGRAÇÃO DE IMAGENS DE SENSORIAMENTO
SISTEMAS DE INFORMAÇÕES GEOGRÁFICAS (SIG);
REMOTO EM UM
ESTUDOS MULTITEMPORAIS E DE DETECÇÃO DE MUDANÇAS;
CONSTRUÇÃO DE MOSAICOS;
PERMITE O CÁLCULO DE DISTÂNCIAS E ÁREAS CORRETAS
CORREÇÃO GEOMÉTRICA
O QUE SÃO DISTORÇÕES SISTEMÁTICAS?
SÃO TODAS AS DISTORÇÕES CUJAS CAUSAS SÃO MODELÁVEIS
POR EQUAÇÕES MATEMÁTICAS SIMPLES (POLINÔMIOS DE GRAU
BAIXO).
TIPOS DE DISTORÇÃO
DISTORÇÕES LINEARES (INERENTES A GEOMETRIA DO SENSOR)
VARIAÇÃO DA ALTITUDE
VARIAÇÃO DO ÂNGULO DE ROLAGEM (ROLL)
VARIAÇÃO DO ÂNGULO DE ARFAGEM (PITCH)
DISTORÇÃO PROVOCADA PELA DERIVA (YAW)
TIPOS DE DISTORÇÃO
DISTORÇÕES LINEARES (INERENTES AO MOVIMENTO DO SATÉLITE)
SISTEMAS DE VARREDURA MECÂNICA (WHISKBROOM)
CISALHAMENTO DA VARREDURA (MOVIMENTO SIMULTÂNEO ENTRE O SATÉLITE E
O ESPELHO)
TIPOS DE DISTORÇÃO
DISTORÇÕES LINEARES (INERENTES AO MOVIMENTO TERRA)
ROTAÇÃO DA TERRA
DESLOCAMENTO ENTRE VARREDURAS SUCESSIVAS
TIPOS DE DISTORÇÃO
DISTORÇÕES NÃO-LINEARES (VISADA PANORÂMICA)
IFOV CONSTANTE
PARA SISTEMAS DE VARREDURA DO TIPO WHISKBROOM
TIPOS DE DISTORÇÃO
DISTORÇÕES NÃO-LINEARES (VISADA PANORÂMICA)
IFOV CONSTANTE
PARA SISTEMAS DE VARREDURA DO TIPO WHISKBROOM
TIPOS DE DISTORÇÃO
DISTORÇÕES NÃO-LINEARES (CURVATURA TERRA OU RELEVO)
ESFERICIDADE DA TERRA
DISTORÇÕES AO LONGO DAS VARREDURAS (ACENTUADA EM SENSORES QUE
POSSUEM GRANDE VISADA LATERAL)
APRESENTAÇÃO DA IMAGEM CORRIGIDA
IMAGEM TM-LANDSAT GRAVADA PELO SISTEMA E GEOMETRICAMENTE
CORRIGIDA:
MÉTODOS POLINOMIAIS
AS COORDENADAS DA IMAGEM BRUTA SÃO RELACIONADAS ÀS COORDENADAS DE
REFERÊNCIA ATRAVÉS DE POLINÔMIOS DE GRAU N.
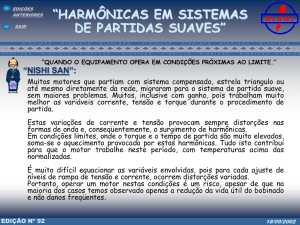
MÉTODOS POLINOMIAIS
3º grau
2º grau
1º grau
DISTORÇÕES NÃO SISTEMÁTICAS (NÃO-UNIFORMES)
ETAPAS DA CORREÇÃO GEOMÉTRICA
CONSTRUÇÃO DE FUNÇÕES POLINOMIAIS ATRAVÉS DE PONTOS DE CONTROLE
ESCOLHA DO MÉTODO DE REAMOSTRAGEM
DETERMINAÇÃO DOS NÍVEIS DE CINZA DA IMAGEM CORRIGIDA
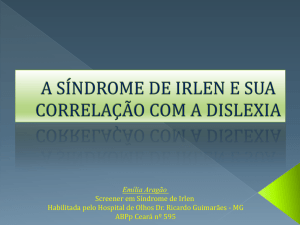
COLETA DE PONTOS DE CONTROLE
MAPA DE REFERÊNCIA
COLETA DE PONTOS DE CONTROLE
IMAGEM DE REFERÊNCIA
COLETA DE PONTOS DE CONTROLE
PONTOS DE CAMPO COM GPS
EXEMPLO DE TRANSFORMAÇÃO DE 1º GRAU (AFIM)
𝑋 = 𝑎. 𝑥 + 𝑏. 𝑦 + 𝑐. 𝑥𝑦 + 𝑑
𝑌 = 𝑒. 𝑥 + 𝑓. 𝑦 + 𝑔. 𝑥𝑦 + ℎ
𝑋1 = 𝑎𝑥1 + 𝑏𝑦1 + 𝑐𝑥1 𝑦1 + 𝑑
𝑌1 = 𝑒𝑥1 + 𝑓𝑦1 + 𝑔𝑥1 𝑦1 + ℎ
𝑋2 = 𝑎𝑥2 + 𝑏𝑦2 + 𝑐𝑥2 𝑦2 + 𝑑
𝑌2 = 𝑒𝑥2 + 𝑓𝑦2 + 𝑔𝑥2 𝑦2 + ℎ
𝑋3 = 𝑎𝑥3 + 𝑏𝑦3 + 𝑐𝑥3 𝑦3 + 𝑑
𝑌3 = 𝑒𝑥3 + 𝑓𝑦3 + 𝑔𝑥3 𝑦3 + ℎ
𝑋4 = 𝑎𝑥4 + 𝑏𝑦4 + 𝑐𝑥4 𝑦4 + 𝑑
𝑌4 = 𝑒𝑥4 + 𝑓𝑦4 + 𝑔𝑥4 𝑦4 + ℎ
𝑋1
𝑌1
𝑋2
𝑌2
𝑋3
𝑌3
𝑋4
𝑌4
A
𝑥1
0
𝑥2
0
𝑥3
0
𝑥4
0
𝑦1
0
𝑦2
0
𝑦3
0
𝑦4
0
𝑥1𝑦1
0
𝑥2𝑦2
0
𝑥3𝑦3
0
𝑥4𝑦4
0
1
0
1
0
1
0
1
0
B
0
𝑥1
0
𝑥2
0
𝑥3
0
𝑥4
0
𝑦1
0
𝑦2
0
𝑦3
0
𝑦4
0
𝑥1𝑦1
0
𝑥2𝑦2
0
𝑥3𝑦3
0
𝑥4𝑦4
0
1
0
1
0
1
0
1
𝑎
𝑏
𝑐
𝑑
𝑒
𝑓
𝑔
ℎ
C
EXEMPLO DE TRANSFORMAÇÃO DE 1º GRAU (AFIM)
Determinação das constantes:
𝐴=𝐵∙𝐶
𝐴
𝐶=
𝐵
𝐶 = 𝑖𝑛𝑣 𝐵 ∙ 𝐴
𝐶=
𝑎
𝑏
𝑐
𝑑
𝑒
𝑓
𝑔
ℎ
𝑋1 = 𝑎𝑥1 + 𝑏𝑦1 + 𝑐𝑥1 𝑦1 + 𝑑
𝑌1 = 𝑒𝑥1 + 𝑓𝑦1 + 𝑔𝑥1 𝑦1 + ℎ
𝑋2 = 𝑎𝑥2 + 𝑏𝑦2 + 𝑐𝑥2 𝑦2 + 𝑑
𝑌2 = 𝑒𝑥2 + 𝑓𝑦2 + 𝑔𝑥2 𝑦2 + ℎ
𝑋3 = 𝑎𝑥3 + 𝑏𝑦3 + 𝑐𝑥3 𝑦3 + 𝑑
𝑌3 = 𝑒𝑥3 + 𝑓𝑦3 + 𝑔𝑥3 𝑦3 + ℎ
𝑋4 = 𝑎𝑥4 + 𝑏𝑦4 + 𝑐𝑥4 𝑦4 + 𝑑
𝑌4 = 𝑒𝑥4 + 𝑓𝑦4 + 𝑔𝑥4 𝑦4 + ℎ
Modelo
EXEMPLO DE TRANSFORMAÇÃO DE 1º GRAU (AFIM)
Para um ponto de controle, após a definição do modelo:
𝑣1𝑥 = 𝑋1 − (𝑎𝑥1 + 𝑏𝑦1 + 𝑐𝑥1 𝑦1 + 𝑑)
𝑣1𝑦 = 𝑌1 − (𝑒𝑥1 + 𝑓𝑦1 + 𝑔𝑥1 𝑦1 + ℎ)
.
.
.
𝑣𝑛𝑥 = 𝑋𝑛 − (𝑎𝑥𝑛 + 𝑏𝑦𝑛 + 𝑐𝑥𝑛 𝑦𝑛 + 𝑑)
𝑣𝑛𝑦 = 𝑌𝑛 − (𝑒𝑥𝑛 + 𝑓𝑦𝑛 + 𝑔𝑥𝑛 𝑦𝑛 + ℎ)
V =𝐴 − 𝐵 ∙ 𝐶
V resíduos do modelo (diferença entre o real e o estimado)
EXEMPLO DE TRANSFORMAÇÃO DE 1º GRAU (AFIM)
Erro médio quadrático: RMSE
RMSE v v v v ... v
2
1x
2
1y
2
2x
2
2y
2
n
Raiz quadrada do somatório dos quadrados dos resíduos.
Condição dos mínimos quadrados para mais pontos de
controle que o necessário:
min v v v v ... v
2
1x
2
1y
2
2x
2
2y
2
n
Encontrar as constantes C que minimizam o somatório dos quadrados
dos resíduos [V].
MÉTODOS DE REAMOSTRAGEM
APÓS DEFINIR QUAL A POSIÇÃO CORRETA DE UM PIXEL, DEVE-SE
DETERMINAR QUAL SERÁ O NOVO NÍVEL DE CINZA
?
1. Nearest Neighbour: take the DN value of the
spatially nearest pixel
2. Bilinear interpolation: Take a distance-weighted
average of the surrounding 4 pixels.
3. Cubic convolution: Use the surrounding 16 pixels to
calculate a weighted average for the new cell.
MÉTODOS DE REAMOSTRAGEM
Vizinho mais próximo (Nearest Neighbour):
Utiliza o nível de cinza do pixel mais próximo
od you choose depends on the type
nd your objectives. Nearest
resampling has the advantage of
g original data values, but it may
ged edges in linear features. Bilinear
on generally smoothes the output
bic convolution is the most
onally intensive, but often produces
t visual quality
MÉTODOS DE REAMOSTRAGEM
Cálculo do vizinho mais próximo:
Aquele que tem a menor distância do seu centro até o ponto.
d1
d4
d2
d3
MÉTODOS DE REAMOSTRAGEM
Interpolação Bilinear (Bilinear Interpolation)
Utiliza três interpolações lineares sobre os níveis de cinza dos
quatro pixels que cercam o pixel da imagem corrigida.
MÉTODOS DE REAMOSTRAGEM
Cálculo da Interpolação bilinear
d1
d4
CD1
CD
d2
d3
1
1
1
1
CD2 CD3 CD4
d1
d2
d3
d4
1 1 1 1
d1 d 2 d3 d 4
MÉTODOS DE REAMOSTRAGEM
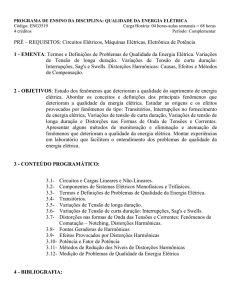
Convolução cúbica (Cubic convolution)
Utiliza cinco interpolações polinomiais de terceiro grau sobre os
níveis de cinza dos dezesseis pixels que cercam o pixel da imagem
corrigida.
MÉTODOS DE REAMOSTRAGEM
REPRESENTAÇÃO DA CONVOLUÇÃO CÚBICA:
INFORMAÇÕES NECESSÁRIAS PARA REALIZAR O
PROCEDIMENTO:
Número mínimo de pontos de controle
nº de pontos = (n+1) (n+2)/2, sendo n o grau do polinômio. Ex:
mínimo de 3 pontos se o polinômio for de 1ºgrau
Eliminação de pontos de pontos mal identificados
Utilização do método de regeressão por mínimos quadrados e
observação do Root Mean Square Error (RMSE) que deve ser sempre
menor do que 0,5 pixel.
ATIVIDADE:
Escolha umas das imagens disponíveis no arquivo da aula;
Defina 3 pontos de controle entre a imagem de referência (mapa) e a imagem a
ser corrigida. Para isso, importe as duas para o workspace do Matlab e mostreas (imshow) na tela.
Utilize a ferramenta adequada para coletar as coordenadas dos pontos;
Utilize a função imcorr para exercer a correção geométrica da imagem.