Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
O COMPORTAMENTO DE UM SISTEMA DE ATERRAMENTO DE UMA SUBESTAÇÃO DE
ENERGIA FRENTE À SITUAÇÃO DE FALTA DE ALTA IMPEDÂNCIA
MARCOS A. R. GAMITO, MÁRIO OLESKOVICZ
Escola de Engenharia de São Carlos, USP
Av. Trabalhador são-carlense, 400, Pq. Arnold Schimidt, 13566-590, São Carlos, SP
E-mails: [email protected], [email protected]
Abstract
This work presents the study of the behavior of a grounding system operating in single-phase fault conditions characterized by high impedance. For the grounding system modelling it was used the transmission lines theory, through distributed
parameters, which conductor was modeled in portions along its length. For the grounding system analysis, the ATP (Alternative
Transients Program) software was used. The system was also modeled by using commercial software. The software were used to
validate the model simulations response in face of the step and touch voltage, and the grounding mesh resistance amount generated by ATP software based on the fundamental frequency. Through the results of the model simulations proposed through ATP
software, it was possible to identify a larger overvoltage in the electric system safe phases, when occurring a fault of high impedance, and when compared to the traditional models most frequently used.
Keywords
Grounding, short circuit, ground impedance, step voltage, surge.
Resumo
Este trabalho apresenta o estudo do comportamento de um sistema de aterramento operando em condições de falta de
alta impedância. Para a modelagem do sistema de aterramento foi utilizado a teoria de linhas de transmissão, mediante parâmetros distribuídos, pela qual o condutor foi modelado em porções ao longo de seu comprimento. Para a análise do sistema de aterramento foi utilizado o programa ATP (Alternative Transients Program), e uma ferramenta computacional comercial para a modelagem do mesmo, com o intuito de validar as respostas de tensão de passo, tensão de toque e valor da resistência da malha de
aterramento gerado pela ferramenta computacional ATP com base na frequência fundamental. Mediante os resultados das simulações do modelo proposto via o ferramenta computacional ATP, quando comparados aos modelos tradicionais usualmente utilizados, foi possível identificar uma sobretensão maior nas fases sãs do sistema elétrico frente à ocorrência de uma falta de alta
impedância.
Palavras-chave
Aterramento, curto-circuito, impedância de aterramento, falta de alta impedância, tensão de passo, sobretensões.
1
impedância) foram simuladas via ferramenta computacional ATP (Alternative Transients Program), no
intuito de verificar a resposta do sistema elétrico
operando nessas condições, ou seja, na presença de
correntes de falta de alta impedância.
Vale frisar que atualmente as ferramentas computacionais comerciais disponíveis não permitem este
tipo de análise, já que fazem uma análise somente no
domínio da frequência fundamental do sistema elétrico (SKM, 2009).
Introdução
O aterramento de sistemas elétricos tem despertado e mantido ao longo do tempo o interesse de
diversos pesquisadores. Muito provavelmente, tal
interesse está relacionado à importância do aterramento para um bom desempenho do sistema elétrico
como um todo e, principalmente, devido às questões
de segurança do corpo técnico diretamente envolvido, bem como dos usuários finais da energia elétrica.
Historicamente, os primeiros esquemas de aterramento foram frutos de uma longa evolução, orientada
pelo objetivo de proteger melhor as pessoas contra
choques elétricos e dos efeitos gerais da passagem de
corrente pelo corpo humano (IEEE, 2000).
No Brasil, devido às características peculiares do
solo, que possui valor médio de resistividade elevado
(superior a 1.000 Ω.m na maior parte do território), o
projeto e construção de malhas de aterramento adequadas à segurança dos seres vivos, e que garantam
um bom desempenho do sistema, constituem laboriosa tarefa. Nesse sentido, os sistemas de aterramento
apresentam uma singular importância no que concerne a sua influência no desempenho do sistema e na
proteção humana (IEEE, 2007).
Neste contexto, este trabalho apresenta um estudo do
comportamento de uma malha de aterramento operando em condições de falta de alta impedância.
Toda a modelagem da malha do sistema de aterramento e as simulações de curto-circuito (falta de alta
2 Teoria de Linhas de Transmissão
Embora os modelos com parâmetros concentrados sejam de fácil compreensão, estes são aproximações das leis fundamentais do eletromagnetismo. Em
circuitos de sinais de baixa frequência e, consequentemente, com sinais de grande comprimento de onda,
estes modelos produzem resultados com precisão
suficiente para o dimensionamento elétrico.
Contudo, para altas frequências, aumentam os efeitos
não previstos em tais modelos que se traduzem em
erros de avaliação tornando o uso inadequado. Neste
caso, é necessária a utilização de modelos com parâmetros distribuídos, onde o condutor é subdividido
em vários trechos de células PI, conforme o modelo
utilizado para modelagem de linhas de transmissão
em alta tensão (Santos, 2009).
Para a modelagem de malhas de aterramento é comum representar os condutores e hastes de aterra1858
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
equações pertinentes, que serão posteriormente apresentadas.
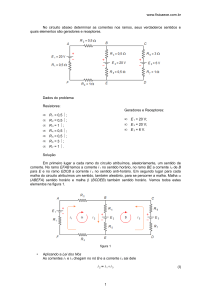
mento por modelos PI, constituídos de indutâncias e
resistências para a terra, conforme ilustrado na Fig.
(1). Nessa modelagem considera-se desprezível o
efeito capacitivo dos condutores e hastes.
Figura 1. Eletrodo de aterramento segmentado e sua representação
mediante um circuito PI.
Pela modelagem, cada modelo de circuito PI representa um cabo desde que o comprimento não seja
superior a 10% do comprimento de onda do surto
considerado. Considerando uma frequência próxima
a 1 MHz para os transitórios decorrentes das descargas atmosféricas, e estes como sendo os de maior
número de ocorrência em sistemas elétricos, obtémse então um comprimento máximo 30 metros de cabo
para cada circuito PI (Santos, 2009).
Na malha, as hastes de aterramento são colocadas em
pontos estratégicos, sendo que o comprimento das
mesmas está em torno de 3,0 m, valor este que produz uma indutância praticamente desprezível quando
comparada com a indutância do cabo. Por conseguinte, é comum representar a haste de aterramento somente pela sua resistência de aterramento. Portanto,
associado às resistências de aterramento do cabo,
tem-se as resistências das hastes.
Em princípio, é comum pensar que um modelo no
qual cada lado dos quadriláteros internos da malha
seja representado por um circuito PI é a melhor opção para representação do sistema, mas isto pode não
ser verdadeiro. Na verdade, um surto de tensão, ou
de corrente, ao atingir a malha de aterramento deverá
“enxergar” a impedância equivalente daquele ponto
para a terra (Santos, 2009). Assim sendo, em uma
simulação computacional, o programa utilizado deverá resolver o circuito da malha de terra e determinar a sua impedância equivalente. Para que isto seja
feito de forma correta, é preciso que todas as características do solo e acoplamentos magnéticos sejam
consideradas.
Sabe-se que o paralelismo em sistemas de aterramento segue uma regra específica, na qual os parâmetros
geométricos do sistema influenciam no resultado
final (Kindermann, 1998). Contudo, os programas
computacionais de transitórios elétricos, geralmente,
não incorporam nenhum modelo específico para
solução de malhas de aterramento. Portanto, a melhor
opção é adaptar o modelo às necessidades e disponibilidade computacionais.
A Fig. (2) ilustra uma malha de terra convencional.
Já a Fig. (3) representa um modelo de uma malha de
terra da Fig. (2) transformada em circuitos PI.
Vale comentar que cada parâmetro da célula PI,
indutância e resistência são calculados conforme
Figura 2. Exemplo de uma malha de terra.
Figura. 3. Modelagem de uma malha de terra em 4 células PI.
2.1 Cálculos dos Parâmetros do Condutor Vertical e
Horizontal
Neste trabalho, para se determinar a indutância
do condutor (própria e mútua), utilizou-se de uma
sub-rotina do software ATP conhecida como Cable
Constants (Prikler, 2009), a qual é a mesma utilizada
para a modelagem de cabos subterrâneos (Prikler,
2009). Tal sub-rotina permite que o usuário, de posse
dos dados geométricos do condutor, obtenha parâmetros elétricos, tais como indutância própria e mútua,
resistência e capacitância para a terra.
Depois de obtidos os valores de indutância própria e
mútua, efetuou-se o cálculo da indutância equivalente dos condutores de cada circuito PI (Kinderman,
1998). Para tanto, implementou-se via a interface do
software ATPDraw (Prikler, 2009), um circuito com
o número de condutores de cada célula PI idênticos e
em paralelo, submetendo-os a uma fonte de tensão.
Colocou-se cada condutor um a um em paralelo com
os demais. Mediante estudos anteriormente realizados deste circuito (Lynce, 2007), concluiu-se que a
indutância equivalente para todos os PI pode ser
calculada mediante a seguinte equação (1):
Leq =
1859
(
n
1
. Lii + ∑ j = 2 M ij
n
)
(1)
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
Na qual,
ܴ é a resistência equivalente da haste (em Ω);
l é o comprimento da haste em (m);
ߩ é a resistividade aparente do solo (em Ω.m);
e r é o raio da haste em (m).
Para o cálculo das resistências associadas em paralelo, equivalente ao número de hastes da malha para
cada célula PI, utilizou-se o fator de multiplicação da
Tab. (1).
Na qual,
ܮ é a indutância série equivalente em (H/m);
ܮ é a indutância própria do condutor em (H/m);
ܯ é a indutância mútua do condutor em (H/m);
e n é o numero de condutores (horizontais ou verticais).
As indutâncias representativas dos condutores que
interligam os PI foram obtidas com esta mesma metodologia.
Para a determinação da resistência de cada condutor
a terra, utilizou-se da seguinte equação (2) (Kindermann, 1998):
2.l 2
p p
ln
− 2 + 2. − 2
ρa r. p
l l
Rl =
.
2.π .l 1 p
. 4
2 l
+
Tabela 1. Fator de Multiplicação para Hastes, Conforme IEEE Std
142-2007.
(2)
Na qual,
ܴ é a resistência de um condutor horizontal (em Ω);
ߩ é a resistividade aparente do solo (em Ω.m);
l é o comprimento do condutor em (m);
r é o raio do condutor em (m);
e p é a profundidade do condutor no solo em (m).
Para o cálculo da resistência equivalente de cada
circuito PI utilizou-se da seguinte equação (3) (Kindermann, 1998).
R=
R1
1
ρa 1 1
+
. + + ...
N N .π .d 2 3
N
ρ a 4l
. ln − 1
N .π .l r
Fator F
2
3
4
8
12
16
20
24
1,16
1,29
1,36
1,68
1,80
1,92
2,00
2,16
3 Modelagem e Estudo do Comportamento da
Malha de Aterramento
No presente trabalho foi modelada mediante a
ferramenta computacional ATP uma malha de aterramento de uma subestação de uma termelétrica com
capacidade instalada de 100 MW de geração. Outro
fato importante é que foi utilizado um software comercial para a validação do modelo proposto, no
intuito de validar o valor da resistência de aterramento, tensão de passo e de toque para o sistema elétrico
analisado na frequência de operação (fundamental)
que é de 60 Hz.
(3)
Na qual,
ܴ é a resistência equivalente dos condutores horizontais ou verticais em (Ω);
ܰ é o numero de condutores verticais ou horizontais;
e d é a distância média entre os condutores em (m).
As resistências ligadas à terra dos condutores que
interligam os PI são obtidas com esta mesma metodologia.
Depois de determinar a indutância e a resistência
equivalente para cada circuito PI, as indutâncias e as
resistências equivalentes ao serem associadas em
circuitos PI devem ser multiplicadas por 2 e 4, respectivamente. Esta multiplicação tem por objetivo
encontrar os valores iniciais das resistências e das
indutâncias antes de serem associadas em série e
paralelo (Lynce, 2007).
Concluída a modelagem dos condutores, na etapa
seguinte, efetua-se a modelagem das hastes. Neste
trabalho, fez-se a representação da haste no ATP
mediante de uma resistência com o valor determinado pela equação (4) ficando:
R=
Número de Hastes
3.1 Aplicação do Software Comercial para Dimensionamento da Malha de Aterramento
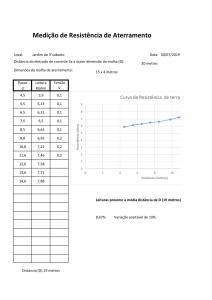
Mediante o levantamento realizado em campo e
dos resultados provenientes da utilização do software
comercial GroundMat (SKM, 2009), foi determinado
à estratificação do solo em duas camadas, conforme
apresentado na Tab. (2).
Para o dimensionamento da malha mediante do método tradicional, foi necessário conhecer além das
grandezas físicas do solo, as grandezas físicas dos
condutores horizontais, verticais e das hastes a serem
utilizadas na construção da malha de aterramento.
Tabela 2. Estratificação do Solo em Duas Camadas.
(4)
1860
Camadas
Resistividade do
Solo (Ω.m)
Espessura (m)
1
2
964
2007
2,2021
∞
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
Sendo assim, sabendo que a corrente de curto circuito máximo do local é de 21,4 (kA), tem-se o cálculo
da seção do condutor, conforme (5) (IEEE, 2000):
Amm ² = I .
1
(5)
TCAP.10−4 k0 + Tm
. ln
tc .α r .ρ r k0 + Ta
Na qual,
ܣ² é a seção do condutor utilizado na malha de
terra em (mm²);
ܫé a corrente de curto-circuito em (kA);
ܶ ܲܣܥé a capacidade térmica do condutor por volume em (J/cm³.°C);
t ୡ é a duração da corrente de curto-circuito em (s);
α୰ é o coeficiente térmico da resistividade do material em (1/°C);
ρ୰ é a resistividade do condutor do material em
(µΩ.cm);
݇ é uma constante do material em (°C);
Tୟ é a temperatura ambiente em (°C);
e T୫ é a temperatura máxima permitida pelo material
em (°C).
Pela equação (5), chega-se então ao valor de 54,14
mm². Considerando uma seção superior normalizada,
tem-se a seção de 70 mm².
Como a subestação possui uma dimensão média de
60 m de comprimento por 26 m de largura, foi possível determinar a área utilizada pela malha, conforme
a Fig. (4), onde a área demarcada em amarelo é o
local onde se encontram fisicamente instalados os
equipamentos da subestação.
Para a determinação do tamanho da malha é necessário que esta esteja sobre toda a área da subestação e
que, quando necessário, se estenda ao seu redor com
o intuído de diminuir o valor da resistência de aterramento para um valor menor que 10 Ω (NBR 5419,
2005).
Neste sentido, primeiramente, foi dimensionada uma
malha do tamanho da subestação. Contudo, pelo
valor da resistência maior do que 10 Ω encontrado
via o software comercial GroundMat, aumentou-se o
tamanho da malha até que o valor ficasse menor do
que 10 Ω. Sendo assim, conforme ilustrado pela Fig.
4, o tamanho da malha extrapolou o tamanho da
instalação física da subestação.
Para a malha de aterramento da Fig. (4), a quantidade
de cabos utilizados de 70 mm² foi de 3.852 m, juntamente com 43 hastes de 5/8” de cobre CooperWeld
de 250 µm com 6 m de comprimento. Com essa
quantidade de cabos e hastes e com o arranjo de
malha chega-se ao um valor de resistência de aterramento de 9,6 Ω, valor menor que o recomendado
pela norma NBR 5419 que é de 10Ω.
Figura 4. Malha de aterramento (as linhas representam os condutores e os pontos as hastes).
O próximo passo foi determinar os níveis máximos
de tensão de passo e de toque em Volts que o corpo
humano de 70 kg pode suportar, conforme as equações (6) e (7), respectivamente.
Etc =
(157 + 0,236.Cs .ρ b )
(6)
tp
Na qual,
ܧ௧ é a tensão de toque suportável em (V);
ܥ௦ é fator de redução;
ߩ é a resistividade da cobertura em (Ω.m);
e ݐ é o tempo de atuação da proteção em (s).
Para este estudo, considera-se um tempo de meio
segundo para o tempo de atuação do sistema de proteção, um fator de redução de 0,678 e 3.000 (Ω.m)
como valor da camada de cobertura do concreto. Foi
considerado uma camada de concreto de 0,05m na
superfície da área da subestação.
Com base nestes valores e pela equação (6), chega-se
então a tensão de toque de 901 (V) (IEEE, 2000).
Para a determinação da tensão de passo suportável
pelo ser humano, utiliza-se a equação (7).
E pa =
(157 + 0,942.Cs .ρ b )
(7)
tp
Na qual,
ܧ é a tensão de passo suportável em (V);
ܥ௦ é fator de redução;
ߩ é a resistividade da cobertura em (Ω.m);
e ݐ é o tempo de atuação da proteção em (s).
Com base nos valores anteriormente apresentados
para o tempo de atuação do sistema de proteção, do
fator de redução e do valor da resistividade da camada de cobertura do concreto, pela equação (7), chega-
1861
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
rença maior da tensão de toque em relação ao centro
da malha. Já no gráfico em amarelo, observa-se que
os valores da tensão de passo são uniformes em toda
a extensão da malha de terra.
se a um valor da tensão de passo de 2.933 (V) (IEEE,
2000).
Analisando a Fig. (5), verifica-se que o nível de tensão de passo da malha esta dentro dos níveis aceitáveis.
Figura 7. Níveis de tensão de toque e de passo (Software
GroundMat).
Figura 5. Níveis de tensão de passo.
Pela Fig. 5, observa-se que o nível de tensão de passo
na área dos equipamentos encontra-se entre 0 e 477,7
(V). Com isso pode-se afirmar que este arranjo de
malha atende os níveis calculados pela equação (7).
Analisando a Fig. (6) verifica-se que o nível de tensão de toque da malha esta dentro dos níveis aceitáveis na região onde se encontra os equipamentos
elétricos.
3.2 Aplicação do Software ATP
Utilizando os modelos propostos nas Fig.(2) e
Fig.(3), bem como as equações (2) e (3) para o cálculo da indutância e resistência dos condutores horizontais e verticais, e das hastes, é possível modelar a
malha do sistema de aterramento anteriormente proposta via o software ATP. Vale lembrar que esta
modelagem é baseada no modelo da teoria de linhas
de transmissão e será implementada neste trabalho
com o intuito de analisar o efeito do sistema de aterramento operando em condições de faltas de alta
impedância.
Faltas de alta impedância ocorrem com muita frequência em sistemas de distribuição de energia elétrica, tornando assim sua modelagem real muito
importante. Conforme será posteriormente apresentado, para a modelagem da falta de alta impedância
foi utilizado um resistor não linear em série com um
indutor de 3 (mH) (Nakagomi, 2006).
Como primeiro passo para a modelagem, divide-se a
malha em células PI e determina-se a quantidade de
células para que a modelagem atenda a resposta em
frequência das possíveis correntes transitórias.
A Fig.(8) retrata como foi feito essa divisão e quantas células foram geradas.
Determinando os valores das resistências e indutâncias a malha se torna conforme a Fig.(9).
Modelada a malha, o passo seguinte é a comparação
dos valores de tensão de passo, de toque e o valor da
resistência da malha apresentados por esta modelagem via o software ATP, com as respostas geradas
pelo software comercial.
Figura 6. Níveis de tensão de toque (Software GroundMat).
O nível de tensão no centro da malha é menor que
161,1(V), e na periferia o valor observado é de
644(V). Ambos os valores estão dentro dos limites
aceitáveis, conforme calculados pela equação (6).
Esses cálculos são de extrema importância para garantir a eficiência da malha tanto no quesito de funcionalidade do sistema elétrico, quanto de segurança
pessoal.
A Fig. (7) ilustra os dois níveis de tensão de passo e
de toque apresentados anteriormente. A parte superior mostra os níveis da tensão de toque, pelos quais se
observa que na periferia da malha existe uma dife1862
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
Figura 10. Método de medição do valor da resistência da malha de
terra e medição dos níveis de tensão de passo e de toque via o
software ATP.
Figura 8. Arranjo das células PI para a modelagem da malha de
aterramento via o software EMTP/ATP.
Variando a frequência do sinal da corrente de 1 (A)
injetada na malha conforme apontado na Fig.(10),
estabeleceu-se a variação da frequência em relação
ao nível do valor da resistência da malha de terra
como ilustrado pela Fig. (11).
Figura 11. Variação do valor da resistência da malha de terra em
relação à frequência.
Figura 9. Valores das grandezas elétricas de cada
célula PI.
A partir da modelagem via o software ATP, injeta-se,
por uma fonte de corrente, uma corrente de 1 (A) em
um ponto de conexão de terra da malha, conforme
indicado na Fig. (10). Medindo-se então o nível de
tensão, foi possível calcular o valor da resistência
elétrica, que para esta situação foi de 7,6 (Ω).
Realizando os mesmos procedimentos apresentados
em (Lynce, 2007) para determinar a tensão de toque
e passo, foram observados os valores de 114 (V) e de
94 (V), respectivamente. Valores estes que estão
dentro dos limites calculados e da faixa dos níveis de
cores apresentados anteriormente, Fig. 5 e Fig. 6.
A Fig. (10) retrata como foi realizada a medição da
resistência da malha via o software ATP. Esta também aponta os dois pontos (U3 e U4) abaixo da fonte
de corrente (U1) onde foi feita a medição da tensão
de passo e o medidor de tensão (U2) onde foi feita a
medição da tensão de toque Fig. (10).
Outro fato importante é que, medindo a corrente
injetada pela fonte em um ponto distante da malha,
também apontado na Fig.(10), verificou-se que quanto maior a frequência da corrente injetada, menor a
corrente medida neste ponto distante, conforme ilustrado na Fig.(12).
O próximo passo foi comparar o modelo de malha de
terra proposto pela teoria de linhas de transmissão
com o modelo tradicional de representar a malha de
terra por apenas um resistor, com o intuito de verificar quais os efeitos de ambos os modelos na presença
de falta com arco elétrico (característica da falta com
alta impedância), visto que este tipo de falta possui
grande quantidade de componentes harmônicos (Nakagomi, 2006).
O sistema elétrico implementado nesta fase do trabalho está representado pela Fig.(13), assim como os
dois sistemas de aterramento, o modelo proposto, e o
modelo convencional, representado na figura por um
resistor apenas.
1863
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
Figura 14. Forma de onda da corrente caracterizada por uma
situação de falta de alta impedância.
Fig. 12. Variação do valor da corrente elétrica em relação à variação da frequência.
Figura 15. Espectro da forma de onda da corrente caracterizada
por uma falta de alta impedância.
O fator determinante para este resultado se deve ao
fato de que as correntes harmônicas encontram uma
dificuldade maior para se dissipar na malha devido à
impedância da mesma, que pode ser notada pelo seu
tamanho e pela quantidade de hastes e cabos utilizados para a sua construção. Quanto maior a frequência
harmônica maior será a dificuldade para a corrente se
dissipar na malha de maior geometria, conforme
ilustra a Fig. (12).
Figura 13. Sistema elétrico implementado e malhas de terra (modelo proposto e modelo convencional).
Pela implementação e execução do circuito da
Fig.(13), obteve-se a forma de onda da Fig.(14), e o
respectivo espectro harmônico da Fig.(15), as quais
representam uma forma de onda da corrente de falta
de alta impedância, que foi caracterizada, para este
estudo, por um valor 30% menor do que a de corrente de um curto circuito monofásico sólido (franco). A
falta monofásica de alta impedância foi aplicada logo
após a chave 01 da Fig. (13) (Nakagomi, 2006).
Para determinar os níveis de tensão das fases foi
utilizado um medidor de tensão logo após a linha e
antes da chave onde ocorreu a falta.
Através da simulação realizada (Fig. 13), percebe-se
na Tab. (3) que o nível de tensão das fases sãs, devido à ocorrência da falta de alta impedância, possui
valores maiores quando a malha de terra do sistema é
a malha proposta neste trabalho. Quando a malha de
terra do sistema é representada apenas por um resistor, os níveis de tensão das fases sãs são menores em
relação ao modelo proposto.
Tabela 3. Sobretensão medida na fase sã (B) devido a uma falta
monofásica de alta impedância (envolvendo a fase A).
1864
Carga do
sistema
(MW)
Fator de sobre
tensão - fase sã
(B) (malha de
terra - resistor)
Fator de sobre
tensão - fase sã
(B) (malha de
terra - modelo
proposto)
Diferença
percentual
(%)
0
0,1
0,2
0,3
0,4
0,5
1,113
1,110
1,108
1,105
1,103
1,101
1,149
1,145
1,142
1,139
1,136
1,133
3,261
3,212
3,163
3,124
3,062
3,012
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
Universidade
Federal
de
Uberlândia,
Uberlândia-MG.
SKM, S. Analysis. (2009). “GroundMat Tutorial”,
Manhattan Beach, CA.
Sendo assim, o modelo proposto de malha de terra é
capaz de retratar melhor o comportamento do aterramento para frequências diferentes da fundamental.
4 Conclusão
Este trabalho apresentou o estudo do comportamento de um sistema de aterramento operando em
condições de falta de alta impedância.
Mediante a modelagem proposta nesta pesquisa para
a malha de terra via o software ATP foi possível
verificar o comportamento desta operando na condição de falta de alta impedância (caracterizada pela
presença de arco elétrico).
Pelo que foi constatado na pesquisa, frente a esta
situação, a variação do valor da impedância de um
sistema de aterramento pode aumentar em até 3% o
nível de sobretensão nas fases sãs do sistema elétrico,
sendo também sensível à variação da carga do sistema elétrico para uma mesma impedância de curtocircuito.
Pelos resultados encontrados até o momento, alertase para a necessidade e uma melhor análise das situações operacionais passíveis de ocorrência no sistema
elétrico e que venham a apresentar uma composição
harmônica nas formas de ondas das tensões e/ou
correntes diferentes da frequência fundamental. A
grande importância desse estudo está relacionada ao
fato de que os níveis de sobretensão nas fases sãs de
um sistema elétrico, quando submetido a um curtocircuito de alta impedância, pode afetar a isolação
dos equipamentos elétricos envolvidos nesse tipo de
falha.
Referências Bibliográficas
IEEE, 2000. IEEE Standard 80: Guide for Safety in
AC Substation Grounding. New York: IEEE.
IEEE, 2007. IEEE Standard 142: Recommended
Practice for Grounding of Industrial and
Commercial Power System. New York: IEEE.
Kindermann, G. and Campagnolo, J. M. (1998).
Aterramento Elétrico, Editora Sagra Luzzatto,
Porto Alegre-RS.
Lynce, Marcelo. (2007). “Introdução ao Programa
ATP”, Universidade Federal de Uberlândia,
Uberlândia-MG.
Nakagomi, M. Renato. (2006). “Proposição de um
Sistema para Simulação de Faltas de Alta
Impedância em Redes de Distribuição”,
Universidade
Federal
de
Uberlândia,
Uberlândia-MG.
NBR5419, 2005. ABNT NBR5419: Proteção de
estruturas contra descargas atmosféricas , Rio de
Janeiro- RJ
Prikler, L. and Høidalen, H. (2009). “User Manual”,
available
at:
www.elkraft.ntnu.no/atpdraw/ATPDMan56.pdf.
Santos, G. C. (2009). “A Influência da Resistencia de
Terra nos Efeitos das Descargas Atmosféricas”,
1865