DINÂMICA DE ESTRUTURAS E
AEROELASTICIDADE
Prof. GIL
Aeroelasticidade Estática
1
ESTEST-56 - Prof. Gil
Introdução à Aeroelasticidade Estática
X-29
2
ESTEST-56 - Prof. Gil
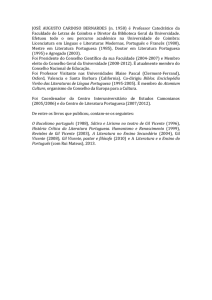
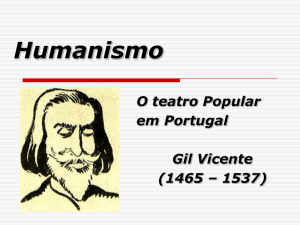
Triângulo de Collar
DSA:Efeitos aeroelásticos na estabilidade dinâmica
SSA: Efeitos aeroelásticos na estabilidade estática
A
SSA
L
C
DS
D
R
F
B
Z
DSA
E
I
V
A: Força aerodinâmica
E: Força elástica
I: Força inercial
Campos Relacionados
V: Vibrações mecânicas
DS: Estabilidade dinâmica
F:
B:
Z:
L:
D:
C:
R:
Fenômenos Aeroelásticos
“Flutter”
“Buffeting”
Resposta dinâmica
Distribuição de carga
Divergência
Eficiência de controle
Reversão do sistema de controle
3
ESTEST-56 - Prof. Gil
Aeroelasticidade Estática
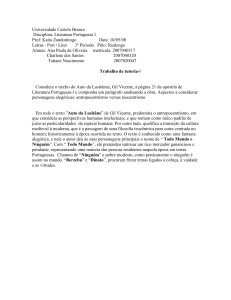
Centro Elástico (CE): é o ponto para o qual uma força normal à corda
é aplicada e a seção não sofre torção, mas apenas flexão.
Uma força aplicada fora do CE causa torção e flexão.
AC - Centro Aerodinâmico
(Ponto onde o Momento
Aerodinâmico não muda)
CE
4
ESTEST-56 - Prof. Gil
Aeroelasticidade Estática
Eixo Elástico: linha ao longo do comprimento da
semi-asa, formada pelos pontos (CE) onde forças
podem ser aplicadas sem resultar em torção da
mesma.
Esforço aplicado
no eixo elástico
(flexão)
Esforço aplicado
fora do eixo elástico
(torção e flexão)
Eixo elástico
5
ESTEST-56 - Prof. Gil
:
Distribuição da sustentação
∂C L
CL =
α
∂α
L
M AC( x ) = L ⋅ x AC + M AC
M
AC
M AC = C M AC q ⋅ S ⋅ c
CP
CE
xac
M xCP = 0
c
c Escoamento subsônico (consegue-se o valor exato
x AC ≅
4 quando se aplica a teoria dos perfis finos).
c
x AC ≅
Escoamento supersônico
2
6
ESTEST-56 - Prof. Gil
Seção Típica de uma Asa
Seção mais representativa da
asa. Em geral, é considerada a Eixo Elástico
75% da semi-envergadura da
asa.
Esta seção depende da rigidez
torcional ao longo da asa.
75%
Seção Típica
L
AC
Kθ
A resistência devido à rigidez torcional é
a tendência de uma seção da asa em
resistir à torção imposta pela seção
adjacente. É representada pela Mola
Torcional (Kθ).
CP
W
CE
7
ESTEST-56 - Prof. Gil
Divergência Aeroelástica-1 GDL
L
L
MAC
AC
θ
Kθ
AC
Kθ
Mθ = Kθ · θ
α
CE
α
MAC
e
e
V
V
Obs.: Geralmente o “Flutter” ocorre
antes que a Divergência,
exceto para asas com
enflechamento negativo.
e - distância do CE ao AC
α - ângulo de ataque inicial
θ - ângulo de torção elástica
8
ESTEST-56 - Prof. Gil
Equilíbrio de Momentos (ref. CE)
M AC + Le = K θ θ
Em termos de coeficientes aerodinâmicos, tem-se:
∂C L
C M AC qSc +
(α 0 + θ ) qSe = K θ θ
∂α
Determina o quanto tem de torção, dependendo da velocidade. Então,
∂C L
e
α + cC M AC
qS ∂ α 0
θ =
Se ∂C L
Kθ
1− q
K θ ∂α
Obs.: θ aumenta quando diminui o denominador. Denominador nulo
corresponde a condição de divergência.
9
ESTEST-56 - Prof. Gil
Condição de divergência
Pressão Dinâmica de Divergência (qD):
Que proporciona a divergência sobre um aerofólio.
Velocidade de Divergência (VD):
Velocidade em que ocorre a Divergência.
LTotal
∂C L
(α 0 + θ ) ∴
= qS
∂α
qD
Kθ
=
∂C L
Se
∂α
VD =
2Kθ
∂C
ρ Se L
∂α
LTotal = L Rígida + L Elástica
O carregamento é alterado pela flexibilidade
Para aumentar a VD: aumentar Kθ ; diminuir e; e reduzir o ρ (aumentar
o nível de vôo). Se e < 0, não existe a condição de Divergência.
10
ESTEST-56 - Prof. Gil
Condição de divergência
Note os termos que compõem a relação abaixo:
θ=
qSeC L α α 0 + qScC M AC
K − qSeC Lα
θ “Rigidez Aerodinâmica”
“Rigidez Estrutural”
“Rigidez Aeroelástica”
A divergência é uma instabilidade independente da magnitude dos
esforços (momentos), mas sim dependente da rigidez aeroelástica
11
ESTEST-56 - Prof. Gil
Condição de divergência
“Rigidez Estrutural”
“Rigidez Aeroelástica”
“Rigidez Aerodinâmica”
12
ESTEST-56 - Prof. Gil
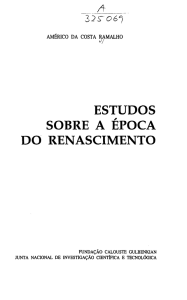
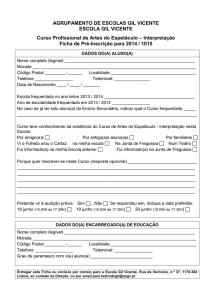
Condição de divergência
Graficamente:
Kθ < q2 SeCLα
K θ > q1 SeC L α
13
ESTEST-56 - Prof. Gil
Influência do peso
O peso W, cujo ponto de aplicação é o CG, também tem
influência sobre a torção elástica, devido o momento negativo
gerado por ele, resultando em:
M AC + Le − W d = K θ θ
∂C L
C M AC qSc +
(α 0 + θ ) qSe − Wd = K θ θ
∂α
∂C L
e
α 0 + cC M AC − W d
qS
∂α
θ =
Se ∂ C L
Kθ
1− q
K θ ∂α
14
Entretanto, note que a
divergência independe
desta “força externa”...
ESTEST-56 - Prof. Gil
Acréscimo de sustentação
Efeito Aeroelástico abaixo da VD:
M AC + Le = K θ θ
∴
∂C L
Se
(α 0 + θ ) + qScC M AC = K θ θ
∂α
∴
∂C
C M AC
c
L
qSe α 0 +
+θ
= Kθθ
∂α
e ∂C L
∂α
α 0 = ângulo de ataque antes da torção elástica
15
ESTEST-56 - Prof. Gil
Acréscimo de sustentação
Como q D
Kθ
=
∂C L
Se
∂α
∴
∂C L
K θ = q D Se
∂α
Então obtém-se :
∂C L
∂C L
= q D Se
θ
qSe (α 0 + θ )
∂α
∂α
⇒
α0 +θ
1
=
α0
1 − qq
D
que é a expressão que indica o quanto de sustentação
se tem em relação à asa rígida.
16
ESTEST-56 - Prof. Gil
Sustentação Efetiva
L Efetiva =
L Rígida + L Elástica
L Rígida
Ex.: V = 0,8
VD
∴
então
⇒
α0 +θ
≅
α0
q
= 0, 64
qD
α0 +θ
α0
α0 + θ
≅ 0, 3
α0
L Elástica ≅ 2 L Rígida
Mas, com α 0 = 5 °
⇒
1
0
θ = 10 ° , e
q
qD
α 0 + θ = 15 °
que está fora da faixa linear (tomar cuidado).
17
ESTEST-56 - Prof. Gil
Considerações adicionais
A eficiência da sustentação modifica o desempenho da aeronave, e
deve ser considerada no projeto;
A superfícies de sustentação devem ser dimensionadas considerando
a flexibilidade;
A redistribuição da sustentação move o centro de pressão de uma asa
na direção da raiz, e para a frente (direção do BA);
O estudo da estabilidade e controle da aeronave deve levar em conta
os efeitos da flexibilidade.
18
ESTEST-56 - Prof. Gil
Divergência Aeroelástica-2 GDL
L
L
MAC
AC
θ
Kθ
e
Kθ
α
e
Kh
Kh
V
e
α
θ
h
AC
Mθ = Kθ · θ
CE
α
MAC
V
- distância do CE ao AC
- ângulo de ataque inicial
- ângulo de torção elástica
- deslocamento vertical
+h
Kh = rigidez em translação
19
ESTEST-56 - Prof. Gil
Equilíbrio de Momentos e Forças (ref. CE)
Sistema de duas equações a duas incógnitas:
M AC + L ⋅ e = K θ ⋅ θ
L = Kh ⋅h
Agrupando:
∂C L
qS
(α 0 + θ ) = K h ⋅ h
∂α
qScC M AC
∂C L
+ qSe
(α 0 + θ ) = K θ ⋅ θ
∂α
20
ESTEST-56 - Prof. Gil
Equilíbrio de Momentos e Forças (ref. CE)
Na forma matricial:
Kh
0
Kh
0
Kh
Kθ
0
0 h
= qSC Lα
K θ θ
0 h
− qSC Lα
K θ θ
qSC Lα
Kθ
1−
qSeC Lα
Kθ
0 − 1 h
− 1
0 e θ + qSC Lα α 0 e + qScC M AC
0 − 1 h
− 1
0 e θ = qSC Lα α 0 e + qScC M AC
h = qSC Lα α 0
θ
Kθ
21
0
1
0
1
− 1 qScC M AC 0
+
Kθ
e
1
ESTEST-56 - Prof. Gil
Equilíbrio de Momentos e Forças (ref. CE)
Na forma matricial:
K
θ
h qSC Lα α 0 K h
=
Kθ
θ
0
− qSC Lα
K
h
qSeC Lα
− 1 qScC M
1−
AC
Kθ +
Kθ
e
1
qSeC Lα
1−
K θ
22
K
θ
Kh
0
− qSC Lα
K
h
qSeC Lα
0
1−
Kθ
1
1
qSeC Lα
1−
K θ
ESTEST-56 - Prof. Gil
Equilíbrio de Momentos e Forças (ref. CE)
Os deslocamentos são dados por:
− qSC Lα α 0
qScC
K
h
M AC
−
h =
Kθ
1 − qSe C Lα
Kθ
qSC Lα α 0
K θ qScC M AC
−
θ=
Kθ
1 − qSeC Lα
Kθ
− qSC Lα
K
h
1 − qSeC Lα
Kθ
1
qSeC
Lα
1 −
K
θ
Moral da história: A pressão dinâmica de divergência é a mesma
que o caso com 1 GDL.
23
ESTEST-56 - Prof. Gil
Outros efeitos...
A condição (pressão dinâmica, por exemplo) em que o aerofólio
perde a sua resistência em torção é conhecida como divergência;
Não apenas o efeito da compressibilidade, mas também um eventual
aquecimento aerodinâmico pode mudar as características estruturais
da estrutura, diminuindo a sua rigidez. (Aerotermoelasticidade). Ex.
vôos em regime hipersônico.
Uma falha estrutural pode alterar a característica aeroelástica e levar
a divergência
24
ESTEST-56 - Prof. Gil
Importante - efeito da compressibilidade
Correção de Prandtl-Glauert:
qD =
Se
Kθ
C Lincα
1− M 2
A velocidade de divergência
aumenta com a altitude,
porém diminui com o efeito
da compressibilidade.
25
ESTEST-56 - Prof. Gil