A robótica
A palavra "robot" surgiu pela primeira vez numa peça
de teatro "RUR" (Rossum's Universal Robots) escrita em
1920 por Karel Capek, um dramaturgo Checoslovaco.
Nessa peça, um personagem construiu vários homens
artificiais e com eles substituiu o trabalho dos homens. Foi
a primeira vez que alguém usou esta palavra para designar
"homem artificial". Na sua língua original (Checa) "Robota"
significa "trabalho forçado". Talvez derivado deste
significado, os robôs estejam ligados à indústria de uma
forma mais acentuada. Ainda antes desta peça, os robôs
eram chamados "Automan" pelos Gregos, cujo significado é
"movimentar automaticamente".
As Três Leis da Robótica foram elaboradas pelo
Rossum's Univeral
escritor Isaac Asimov no seu livro de ficção I, Robot ("Eu, Robots
Robô"):
• 1ª lei: Um robô não pode ferir um ser humano ou, por passividade,
permitir que seja ferido.
• 2ª lei: Um robô deve obedecer às ordens que lhe sejam dadas por
seres humanos, excepto nos casos em que tais ordens contrariem a
Primeira Lei.
• 3ª lei: Um robô deve proteger sua própria existência desde que tal
protecção não entre em conflito com a Primeira e Segunda Leis.
1
A electrónica
Resistências:
Qualquer elemento que se oponha à passagem da corrente eléctrica
(contínua ou alternada) designa-se por resistência eléctrica.
Normalmente as resistências representam-se pela letra R e a sua
unidade de medida é o Ohm (Ω).
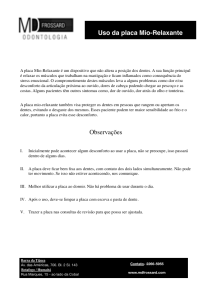
O seu valor nominal é apresentado por
faixas coloridas (código de cores), que
obedecem ao seguinte critério: partindo da
extremidade, as duas primeiras cores formam
um número com dois algarismos; a terceira cor
é o multiplicador, corresponde ao expoente da
potência de 10 que multiplica o número inicial; a quarta cor corresponde à
tolerância, em percentagem.
Tabela de Cores da Resistência:
Côr
1ª e 2ª Faixa
1º e 2º Número directo
Prata
Ouro
Preto
Castanho
Vermelho
Laranja
Amarelo
Verde
Azul
Violeta
Cinzento
Branco
0
1
2
3
4
5
6
7
8
9
3ª Faixa
Factor
multiplicador
0.01
0.1
x1
x 10
x 100
x 1,000
x 10,000
x 100,000
x 1,000,000
4ª Faixa
Tolerância
%
Sem cor
Prateado
Dourado
+/- 10
+/- 5
+/- 20
+/- 1
+/- 2
+/- 3
+/- 4
x 0.1
x 0.01
Exemplo: Qual o valor da resistência da imagem?
As duas primeiras cores: amarelo (4) e violeta (7)
formam o número 47. A terceira cor, laranja (3),
corresponde ao expoente da potência de dez: 103; a
quarta cor, prata (10%), indica a tolerância. Assim, a
resistência eléctrica é:
R = (47 x 103 ± 10%) Ω ou R = (47 000 Ω ± 4700Ω )
Condensadores:
O condensador é um componente que armazena
energia entre duas placas condutoras (E=1/2CV2).
A capacidade eléctrica (C) relaciona a carga
armazenada com a tensão aos seus terminais
(C=Q/V). O condensador é composto por duas placas
condutoras que são separadas por um isolante ou
2
dieléctrico.
Existem condensadores monolíticos (sem polaridade) e electrolíticos
(com polaridade).
Díodos:
O díodo é composto por dois blocos de
material semicondutor, um do tipo N, dopado com
iões negativos (-), e outro do tipo P dopado com iões
positivos (+).
O díodo tem como característica mais
importante, permitir que a corrente circule apenas
num sentido.
Para indicar a polaridade, o díodo tem uma
marca que aponta para a extremidade correspondente ao cátodo. O sentido
positivo da corrente eléctrica flui do ânodo (+) para o cátodo (-).
Led, emissor de Luz
Um led é constituído por uma junção PN de material
semicondutor e por dois terminais, o Ânodo (A) e o Cátodo (K).
A cor da luz emitida pelo led depende do material
semicondutor que o constitui.
Tal como o díodo, o led tem polaridade, e o chanfro está
associado ao perno mais curto do Led correspondente ao
cátodo ( - ).
3
Bot'n Roll ONE
Material
O robô é composto pelo seguinte material:
2
Motores de corrente continua
1
Placa de acrílico preto
1
Saco com duas rodas motrizes e um rodízio fixo
1
Saco com bateria, carregador e acessórios de montagem
1
Saco com componentes mecânicos
1
Placa de circuito impresso
1
Saco com componentes electrónicos
1
Cabo USB de ligação ao computador
1
CD com manuais e software de instalação
Montagem
A montagem do Bot'n Roll ONE deve ser feita em duas fases: montagem
mecânica e montagem eléctrica e electrónica.
a) Montagem dos Componentes Mecânicos
i. Montagem dos motores
O Bot'n Roll ONE usa dois motores de corrente
contínua para se mover. A sua montagem na placa de
acrílico é feita por uma peça metálica com formato em L.
Na figura 1 apresenta-se todas as peças necessárias para
montagem do motor.
Passos de montagem:
1. Coloca-se a peça metálica de formato em L no motor (figura1A).
2. Fixa-se a peça ao motor através de parafusos M3 (figura1B).
3. Para fixar o motor ao acrílico utiliza-se parafusos M3 e porcas
(figura1C).
4. Existem duas opções para colocação dos motores ( ver em
anexo a descrição dos furos na placa de acrílico).
N opção 1 colocamos os motores mais perto da frente e a na
opção 2 ficam mais recuados. Com a opção 2 conseguimos
obter dimensões do robô que permitem competir em provas de
robótica ( Busca e salvamento, futebol júnior, dança, ...).
Fica à tua escolha a posição dos motores.
5. Com ajuda de uma chave sextavada de 2mm e um alicate de
pontas fixa-se a peça metálica na base do robô (figura1D).
Figura 1: Peças para
montagem do motor
4
ii. Montagem das Rodas de Tracção e Motor
As rodas de tracção têm 75mm de diâmetro e 25mm
de espessura. São compostas por jantes de plástico
revestidas a borracha. Na figura 2 pode ver-se as rodas e as
peças de fixação.
A fixação das rodas ao motor é feita através da peça
de acoplamento.
Os passos de montagem são os seguintes:
1. Coloca-se a peça de acoplamento no centro da roda.
2. Coloca-se o parafuso no lado oposto da roda.
3. Rosca-se o parafuso na peça de acoplamento.
4. Repetem-se todos os passos de 1 a 3 para a outra roda.
5. Por fim coloca-se o conjunto roda e peça de acoplamento no veio
do motor através de um pequeno perno de aperto M4.
iii.Montagem
iii.Montagem da Roda Fixa
A roda fixa é utilizada para servir de ponto de apoio ao
Bot'n Roll ONE. Esta roda é colocada na placa de acrílico
através de um parafuso M5 e porcas para o aperto e ajuste
de altura.
Os passos de montagem são os seguintes:
Figura 2.: Fixação da
roda à peça de
acoplamento ao motor.
1. Fixam-se os parafusos M5 na roda fixa com porcas (figura 3).
2. Rosca-se outra porca em cada parafuso (figura 3).
3. Coloca-se a roda fixa na base através dos orifícios de 5mm.
4. Para finalizar, coloca-se uma porca em cada parafuso para fixar a
roda à base (figura 3).
5. Pode-se regular a altura da roda fixa ajustando as porcas
superiores.
Figura 3.: Fixação da
Roda Fixa à base de
acrílico
5
b) Montagem dos Componentes Electrónicos
i. Montagem da placa de circuito impresso no robô
Para a montagem da placa do robô são necessários os seguintes
materiais e ferramentas:
Placa de circuito impresso
Componentes electrónicos
Ferro de Soldar
Estanho
Aspirador de Solda
Alicate de Corte
ATENÇÃO: Antes de iniciar a soldadura dos componentes na placa de
circuito impresso leia o mini curso de soldadura que se encontra em anexo a
este manual.
Em anexo a este manual existe uma folha com a descrição dos
componentes na placa de circuito impresso que poderá servir como guia de
montagem.
6
ii. Montagem das Resistências
Tomando como referência a tabela ao lado,
solde as resistências nos sítios correspondentes na
placa de circuito impresso (figura 4):
1. solde as resistências de valor de 1 KΩ (Cores: Castanho,
Castanho
Preto,
R1,
Preto Vermelho e Ouro)
Ouro nos sítios correspondentes (R1,
R2, R13, R14).
R14
2. solde as resistências de valor de 10 KΩ em R3,
R3 R11 e
R12.
R12
3. solde a resistência de 22 KΩ em R4.
R4
4. solde a resistência de 4,7 KΩ em R5.
R5
5. solde a resistência de 100 KΩ em R7.
R7
6. solde as resistências de 10 Ω em R8 e R9 .
Descrição
Componente
R1
1 KΩ
R2
1 KΩ
R13
1 KΩ
R14
1 KΩ
R3
10 KΩ
R11
10 KΩ
R12
10 KΩ
R4
22 KΩ
R5
4,7 KΩ
R7
100 KΩ
R8
10 Ω
R9
10 Ω
Figura 4: Placa com as resistências
iii.Montagem
iii.Montagem dos Potenciómetros
A placa de circuito impresso possui dois
potenciómetros, um com o valor de 10 K Ω e outro
com o de valor de 500Ω.
O seu valor encontra-se escrito na parte lateral
do potenciómetro.
Na figura 5 podemos ver que P 103
corresponde a 10000 Ω, ou seja, 10 KΩ e P 501
corresponde a 500 Ω.
Coloca-se o potenciómetro de 10 KΩ em R6
e o potenciómetro de 500 Ω em R10.
Figura 5.: Potenciómetros
Descrição Componente
R6
Pot.10 KΩ
R10
Pot. 500 Ω
Figura 6: Placa com os potenciómetros
7
iv.Montagem
iv.Montagem dos Leds de Cor
A placa contém díodos emissores de luz Descrição
Componente
(LED) de duas cores, verde e vermelho.
LED1
LED Verde
O LED verde serve como sinalizador de DS3
LED Vermelho
alimentação do robô. O LED vermelho serve
DS4
LED Vermelho
para sinalizar de que lado o robô está a detectar
obstáculo.
Coloque o LED verde na posição assinalada por LED1 e os LEDs
vermelhos em DS3 e DS4. Os leds têm um recorte lateral que identifica a
polaridade. A inserção deve ser feita de acordo com a posição indicada pelo
desenho na placa.
Figura 7: Placa com os leds
v. Montagem dos Condensadores e Oscilador
Os condensadores são do tipo monolíticos
cerâmicos e a placa contém condensadores de dois
valores, 1 nF e 100nF.
O condensador de 100nF é o que está
representado à direita na figura 8 e o de 1nF está
representado à esquerda na figura 8.
Coloque os condensadores de 100nF em C1,
C1
C2,
C2 C3 e C5,
C5 e o condensador de 1nF em C4.
C4
Coloque o oscilador na posição 4Mhz.
Descrição
Componente
C1
100nF
C2
100nF
C3
100nF
C8
100nF
C4
1nF
4Mhz
Oscilador
Figura 8.: Condensadores
Figura 9: Placa com os condensadores e oscilador
8
vi.Montagem
vi.Montagem dos Díodos
A placa possui díodos com duas referências
o 1N5406, que é usado para o accionamento
dos motores, e o 1N4007 que é usado na parte
de alimentação do robô.
Tal como os LEDs os díodos são colocados
numa só disposição. O díodo contém uma marca
branca que tem de coincidir com a marca
representada na placa (tal como na figura 10). A
referência do díodo encontra-se representada no
respectivo díodo.
Coloque os díodos 1N5406 nas posições
D1,
D1 D2, D3, D4, D5, D6, D7 e D8.
O díodo 1N4007 coloque em D9.
Descrição
Componente
D1
1N5406
D2
1N5406
D3
1N5406
D4
1N5406
D5
1N5406
D6
1N5406
D7
1N5406
D8
1N5406
D9
1N4007
Figura 10: Placa com os díodos
vii.Montagem
vii.Montagem dos Conectores
Existem dois tipos de conectores na
placa, um conector com aperto através
de parafuso e um conector de pinos
(figura 11).
Os conectores pretos de 2 pinos
devem ser colocados em J1,J2 e J3.
J3
Coloque o conector preto de 3 pinos
em S2.
S2
Coloque o conector de 4 pinos em
JP1,
JP1 JP3 e JP5.
JP5
Por fim, coloque o conector de 5
pinos em JP2.
JP2
Descrição
Componente
J1
Conector Preto 2 pinos
J2
Conector Preto 2 pinos
J3
Conector Preto 2 pinos
S2
Conector Preto 3 pinos
JP1
Conector 4 pinos branco
JP2
Conector 5 pinos branco
JP3
Conector 4 pinos branco
JP5
Conector 4 pinos branco
Figura 11: Conectores
9
Figura 12: Placa com os conectores
viii.Montagem
viii.Montagem do Suporte de Fusível
Para protecção contra curto circuitos
coloca-se um fusível com o respectivo suporte.
Na figura 13 podemos ver o suporte de
fusíveis na placa.
Descrição
Componente
F1
Suporte fusível
Coloque o suporte de fusível em F1 e encaixe o fusível de 2A no suporte.
Figura 13: Placa com suporte de fusível
10
ix.Montagem
ix.Montagem do Condensador Electrolítico
O condensador electrolítico contém terminais
polarizados, ou seja, a inserção é feita numa
única posição. O sinal + representado em C6 na
placa corresponde ao terminal mais comprido do
condensador electrolítico (figura 14).
Descrição
Componente
C6
4,7µF
Coloque o condensador de 4,7µF na posição
C6 da placa..
Figura 14: Placa com condensador
electrolítico
x. Montagem dos Integrados PICAXE 28X1 e MC74HC00N
Na placa são utilizados dois integrados:
- PICAXE 28X1: unidade de processamento
de 28 pinos (figura 15).
Descrição
Componente
U2
PICAXE 28X1
U4
MC74HC00N
- MC74HC00N:integrado de 14 pinos com
portas NAND para o circuito de detecção de
obstáculos.
Os integrados têm uma única posição de
inserção na placa. Numa das extremidades existe
uma cavidade que tem que corresponder com a
marca na placa (figura 16).
Coloque o suporte do integrado PICAXE
28X1 em U2 e o suporte do integrado SN74HC00N
em U4. Solde os suportes à placa e encaixe
finalmente os circuitos integrados na orientação
correcta.
Figura 15: PICAXE 28X1
Figura 16: Placa com os integrados
11
xi.Montagem
xi.Montagem do Componente 7805 e L298N
O componente 7805 é um regulador de tensão Descrição Componente
usado para alimentar os dispositivos que trabalham U3
7805
com a tensão de 5 Volts, e tem uma única posição U1
L298N
de inserção na placa (figura 17).
O componente L298N corresponde a uma dupla ponte H para controlar,
independentemente, cada motor do robô. Este componente também tem
uma única posição de inserção na placa (figura 18).
Coloque o componente 7805 em U3 e o componente L298N em U1.
U1
Figura 17: Placa com o 7805
Figura 18: Placa com o L298N
xii.Montagem
xii.Montagem dos Emissores e Receptor de Infravermelhos
Os emissores e receptor de Descrição Componente
infravermelhos são usados para o circuito DS1
Emissor Infravermelho
de detecção de obstáculos.
DS2
Emissor Infravermelho
Coloque
os
emissores
de
IR
Receptor TSOP2238
infravermelhos na placa virados para o
exterior nas posições DS1 e DS2 (figura 19).
Coloque o receptor de infravermelho TSOP2238 na placa na posição IR
(figura 19), com a sua face circular virada para a parte exterior (zona de
recepção de feixes infravermelhos).
Figura 19: Placa com os infravermelhos e o TSOP2238
12
xiii.Montagem
xiii.Montagem do conversor USB – Série (RS232)
O conversor USB – Série (RS232) (figura 22) é o dispositivo que permite
programar o robô através uma porta USB do computador.
Este dispositivo é colocado na placa na zona assinalada por Conversor
USB RS232,
RS232 através dos terminais JP6 e JP4 (figura 21).
Figura 22: Conversor USB – Série
(RS232)
Figura 21: Espaço na placa
para o conversor
Figura 20: Conversor na placa
14.Montagem
14.Montagem da placa na base de acrílico
A montagem da placa na base de acrílico é efectuada através de
suportes de plástico (figura 24) e seus acessórios. A placa possui, nas
extremidades, quatro pontos de apoio para colocar os suportes.
Primeiro, coloque as alturas na placa segurando com os parafusos de
plástico. De seguida, coloque a placa com os suportes nos sítios
correspondentes na base de acrílico, tendo em atenção que a parte de
detecção de obstáculos fica voltada para a frente do robô. A fixação é
efectuada através das porcas de plástico (figura 25).
Figura 23:
Interruptor
Geral
Figura 24:
Suporte de
plástico
Figura 25: Suporte fixado na placa de
circuito impresso
13
15.Ligação
15.Ligação dos fios do motor à placa
A passagem dos fios dos motores, da parte
inferior da base para a parte superior, é efectuada
por um orifício de 8mm que fica junto à saída dos
fios dos motores. A ligação dos dois motores é feita
na placa pelos conectores pretos J2 e J3, tendo em
conta que o motor da esquerda corresponde ao
conector da esquerda e motor da direita ao conector
da direita.
Os fios do motor têm duas cores: um fio é preto
e outro vermelho. É importante ligar correctamente Figura 26: Ligação dos fios do
estes fios pois a polaridade determina o sentido de motor ao conector da placa
rotação do motor (figura 26).
O fio vermelho liga na descrição “+” e o fio preto na descrição “-”.
16.Montagem
16.Montagem do Interruptor Geral
O interruptor (figura 23) é necessário para ligar e desligar a alimentação
do robô. Deve ser instalado na base de acrílico através do orifício de 6mm na
parte traseira do lado direito.
A ligação à placa de circuito impresso é efectuada através de dois fios
amarelos com terminais. Os terminais dos fios são conectados aos terminais
do interruptor (figura 27). A passagem dos cabos da parte inferior para a
parte superior da base é efectuada pelo orifício junto à roda fixa. Os fios são
ligados à placa do robô através do conector S2. O ligador do meio fica vazio
(figura 28).
Figura 27: Terminais no interruptor
Figura 28: Ligação dos fios do interruptor ao
conector S2
14
17.Montagem
17.Montagem da Bateria
A bateria é colocada na parte inferior da base através de duas tiras de
velcro. Antes de colocar o velcro na base verifique que a zona de colagem não
possui sujidade e gordura das mãos. Para retirar sujidades e gordura limpe a
zona com um pano embebido em álcool.
Figura 29.: Conjunto bateria, carregador e ficha de ligação à placa.
Depois de fixada a bateria à base, liga-se a ficha entre a bateria e a
placa do robô (figura 29).
ATENÇÃO:
ATENÇÃO: Deve-se ligar primeiro a ficha à placa e posteriormente à
bateria, caso contrário corre-se o risco de provocar um curto-circuito na
bateria e danificá-la irremediavelmente.
A passagem dos cabos da parte inferior para a parte superior da base é
efectuada pelo orifício representado no anexo “Placa de acrílico”. A ficha tem
polaridade, o vermelho representa o positivo (+) e o preto o negativo (–) da
alimentação, por isso ligue a ficha ao conector J1 da placa tal como está
representado na figura 1.
Figura 30: Ligação dos fios da ficha da bateria ao
conector da placa
15
18.Instalação
18.Instalação do Driver do Conversor USB – Série (RS232)
Quando se liga o cabo ao conversor USB – Série (RS232) pela primeira
vez, aparece no ecrã do computador uma mensagem para instalar o driver.
Este driver está disponível no CD que acompanha o robô. Tenha atenção na
escolha do driver para o sistema operativo que está a usar.
Execute os seguintes passos:
1.Conecte o cabo USB numa porta USB disponível. O Windows® reconhece o
conversor USB - Série (RS232) e vai aparecer automaticamente uma janela
com “Assistente de novo hardware encontrado”.
2.Seleccione “Não, não desta vez” e clique em Seguinte.
3.Na janela seguinte seleccione “Instalar apartir de uma lista ou de uma
localização especifica (avançadas)”. Clique em Seguinte.
16
4.Depois, aparece a janela para escolher as opções de procura e instalação.
Seleccione a opção “Procurar o melhor controlador nestas localizações” e
indique a directoria onde contém os ficheiros necessários para a instalação
do driver ( por exemplo D:\Driver ).
5.Por fim, aparece a janela final a dizer “O assistente terminou a instalação
do software para”. Clique em concluir.
6.Tenha atenção que todo o processo do passo 3 ao 5 vai ser repetido. Isto é
completamente normal visto que o sistema operativo Windows® necessita de
instalar dois ficheiros para o Conversor USB – RS232.
17
19.Calibração
19.Calibração do circuito de detecção de obstáculos
A calibração do circuito de detecção dos obstáculos tem os seguintes passos:
1.Faça
o download do programa “CalibraIR.bas” para o PICAXE® (ver ponto 20 - Ambiente
1.
de Programação) e coloque-o a correr no robô.
2.Coloque
o potenciómetro R10 rodado totalmente para a direita e o potenciómetro R6
2.
rodado para a esquerda.
3.Coloque
3.
o robô virado para um obstáculo branco (exemplo: folha branca) a uma distância
de 2cm.
4.Depois,
com o robô virado para a frente, vá rodando o potenciómetro R6 no sentido dos
4.
ponteiros de relógio até acender os leds vermelhos (figura )
5.De
5. seguida, afaste o obstáculo (folha) do robô até os leds apagarem.
6.Execute
o passo 3 e 4 até encontrar a distância máxima de detecção que é cerca de
6.
11cm.
Figura 31: LEDs vermelhos acesos a detectar
obstáculos
18
20. Ambiente de Programação
1.Descrição
1.Descrição do Software “PICAXE® Programming Editor”
O software utilizado neste robô é o PICAXE® Programming Editor. É
necessário para fazer a edição e download dos programas em BASIC. Este
software encontra-se disponível no CD que acompanha o robô.
Ao abrir o programa aparecerá uma janela na qual terá de seleccionar o
tipo de PICAXE®, que neste caso é o 28X1, e a porta COM virtual criada pelo
computador para a programação. Valide as opções e o software estará pronto
para criar os seus programas em BASIC.
Valide as opções descritas em baixo no menu editor e o software estará
pronto para criar os seus programas em BASIC.
19
2. Programa de exemplo
O programa descrito abaixo é um exemplo que serve para fazer a
calibração do circuito de detecção de obstáculos.
Este programa tem como principal função a selecção da emissão do
feixe de luz infravermelho. A emissão é feita alternadamente, ora pelo
emissor de infravermelho do lado esquerdo, ora pelo emissor de
infravermelho do lado direito. Isto permite detectar de que lado se encontra o
obstáculo.
Veja outros exemplos incluídos no CD e comece a fazer os seus próprios
programas. Poderá encontrar mais informação no site da PICAXE
http://www.rev-ed.co.uk/picaxe/software.htm e em http://botnroll.com/.
20
30. Anexos
1.Lista
1.Lista de Componentes Electrónicos
Descrição
R1
Componente
Descrição
Componente
1K Ω
J1
Conector Preto 2 pinos
R2
1K Ω
J2
Conector Preto 2 pinos
R3
10K Ω
J3
Conector Preto 2 pinos
R4
22K Ω
JP1
Conector Branco 4 pinos
R5
4,7K Ω
JP2
Conector Branco 5 pinos
R7
100K Ω
JP3
Conector Branco 4 pinos
R8
10 Ω
JP5
Conector Branco 4 pinos
R9
10 Ω
S2
Conector Preto 3 pinos
R11
10K
F1
Suporte fusível
R12
10K
C6
4,7uF
R13
1K
U2
PICAXE 28X1 e suporte
R14
1K
U4
SN74HC00N e suporte
R6
Potenciómetro 10K
U3
7805
R10
Potenciómetro 500 Ω
U1
L298N
LED1
LED Verde
DS1
Infravermelho
DS3
LED Vermelho
DS2
Infravermelho
DS4
LED Vermelho
IR
Conversor
USB
TSOP2238
C1
100nF
C2
100nF
C3
100nF
C4
1nF
C8
100nF
4Mhz
Oscilador
D1
1N5406
D2
1N5406
D3
1N5406
D4
1N5406
D5
1N5406
D6
1N5406
D7
1N5406
D8
1N5406
D9
1N4007
21
2.Placa
2.Placa de Acrílico (Vista de Topo)
22
3.Placa
3.Placa de Circuito Impresso
23