Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
MODELAGEM E CONTROLE DO CONVERSOR CC-CC ELEVADOR DAB+DAB EM UMA
MICRORREDE CC BIPOLAR
Walbermark M. dos Santos, Thiago A. Pereira, Henrique R. e Mamede, Denizar C. Martins
Departamento de Engenharia Elétrica, Universidade Federal de Santa Catarina
Instituto de Eletrônica de Potência, INEP
Florianópolis, Brasil
[email protected], [email protected]
Abstract This paper shows the modelling and control of the new step up converter derived from TAB converter. The proposed
converter (here named DAB + DAB) has twice the gain of the conventional DAB converter, 4 bidirectional ports, can operate as
a high-gain DAB or as an interface between networks cc monopolar and bipolar. Have easy making and operation. Has the potential to be used in microgrids or electric vehicles.
Keywords New Converter DAB+DAB,control, microgrid.
Resumo Neste artigo mostra-se a modelagem e o controle de uma nova topologia de conversor elevador derivado do
conversor TAB. O conversor proposto (denominado aqui de DAB+DAB) possui o dobro de ganho do conversor DAB convencional, 4 portas bidirecionais, pode operar como um DAB de alto ganho ou como uma interface entre redes cc monopolares e bipolares. Possui fácil construção e comando simples. Tem potencial para ser utilizado em microrredes ou veículos elétricos.
Palavras-chave Novo conversor DAB+DAB, controle, microgrid.
utilização da eletrônica dentro destes sistemas (Lago,
2011; Lago, Heldwein, 2011). Conversores bidirecionais quanto ao fluxo de potência e com capacidade de acomodar sistemas de acumulação de energia
elétrica possuem uma ampla aplicação nesse cenário.
Quando há necessidade da separação elétrica entre os níveis de terra dos circuitos e/ou adaptação de
níveis de tensão, conversores com isolação galvânica
(transformador) também ganham espaço.
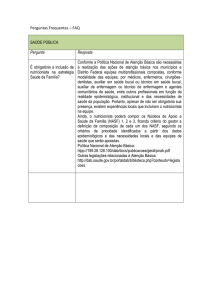
Destarte, este artigo apresenta a modelagem e
controle de um conversor, derivado do conversor
TAB (Triple Active Bridge), já bastante difundido na
literatura, destacando-se Duarte(2007)., dos Santos
(2011). O conversor proposto neste artigo, mostrado
na Figura 1, pode ser utilizado para interligar microrredes cc.
1 Introdução
Sistemas de processamento de energia oriunda
de fontes renováveis (como solar, eólica, etc), veículos elétricos e microrredes (ca ou cc) têm impulsionado consideravelmente o desenvolvimento de conversores eletrônicos de potência.
Em se tratando de microrredes, em Heldwein
(2009), Salomonsson (2008), Karlsson (2002), Salonen et al. (2008), Kakigano et al. (2008) e Engelenk
et al. (2006), são mostrados resultados de pesquisa
destacando que as redes em corrente contínua parecem ser mais vantajosas para um cenário no qual
haja alto grau de inserção de geração distribuída e
que as cargas sejam predominantemente eletrônicas
de forma a necessitarem de um estágio em corrente
contínua.
Apesar das redes em corrente contínua apresentarem algumas características desvantajosas (como
por exemplo, maior dificuldade em se interromper a
corrente, o alto custo dos conversores eletrônicos e
sua menor confiabilidade quando comparados aos
transformadores), a sua utilização torna-se interessante dentro do contexto atual, no qual tem-se explorado bastante a geração distribuída, e que a maioria
das tecnologias de geração e armazenamento de energia não podem ser conectadas diretamente à rede
convencional por operarem com tensão contínua ou
com frequências diferentes da rede em ca (Lago,
2011).
Dentro deste contexto, diversas topologias de
conversores e métodos de controle têm surgido atualmente para poder atender à demanda crescente da
Figura 1. Contexto de utilização do conversor em estudo.
Para melhor apresentação do trabalho, o mesmo
está dividido em quatro seções. Na seção 1 foi apresentada a justificativa da utilização deste conversor;
na seção 2 é apresentado o conversor proposto, destacando sua modelagem matemática para controle, na
seção 3 apresenta-se resultados de simulações computacionais e experimentais; por último a quarta seção apresenta as conclusões a respeito do trabalho.
4248
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2 Conversor DAB+DAB
O conversor DAB (Dual Active Bridge) (De
Doncker , 1991) tem sido bastante explorado na literatura. Na Figura 2 mostra-se uma variação deste
conversor, denominado neste trabalho de conversor
DAB+DAB. Como já dito anteriormente, o conversor DAB+DAB também pode ser visto como um
conversor TAB com duas de suas portas conectadas
em série.
Esses conversores fazem parte da família de
conversores multiportas, onde porta é um ponto no
conversor no qual pode ser conectada uma carga e/ou
fonte. Assim, o conversor DAB+DAB possui 4 (quatro) portas.
Neste trabalho, para simplificar os estudos, o retificador da Figura 1 foi substituído por uma fonte cc
e somente há cargas passivas na saída do conversor
DAB+DAB, ou seja, nenhuma geração distribuída é
considerada neste primeiro momento.
A modulação utilizada no conversor será a phase-shift, mostrada na Figura 3, onde Ts é o período de
comutação do conversor.
Figura 4. Circuitos equivalentes do transformador.
A potência transferida entre as portas através do
transformador é dada pelo conjunto de equações (1),
Su et.all, dos Santos (2011), Duarte(2007).
1
P21
6
1
P13
6
P 1
32 6
2.1 Potência transferida entre as portas
Considerando que a indutância magnetizante do
transformador tem valor muito elevado, e que quando refletidas para o enrolamento do transformador
que compõe a porta 1, todas as indutâncias possuem
2
2
N
N
o mesmo valor L L1 L2 1 L3 1 , o
N2
N3
transformador pode ser representado por um circuito
equivalente Y ou , como mostrado na Figura 4a e
Figura 4b respectivamente.
V1 V2
21 1 21
af s L
V1 V3
31 1 31
af s L
V2 V3
2
a fs L
32 1
(1)
32
onde
f s 1 : frequência de comutação;
Ts
a
N 2 N3
: razão entre o número de espiras.
N1 N1
As diferenças angulares entre as tensões são dadas por (2).
21 2 1 ;31 3 1
(2)
32 3 2
A potência ativa injetada em cada porta é dada
por (3)
P1 P13 P21 ;P2 P21 P32
(3)
P3 P32 P13
Substituindo-se (1) em (3), as correntes injetadas
nas portas 2 e 3 através do transformador são determinadas por (4).
Figura 2. Conversor em estudo (DAB+DAB).
1
I2
6
1
I 3 6
1 V3
V1
21 1 21
32 1 32
2
af L
6
a fL
(4)
32 1 V1
31
V2
32 1
31 1
6 af L
a2 f L
2.2 Circuito equivalente simplificado das portas de
saída
Figura 3. Modulação phase-shift adotada φ21 φ31 .
Na modelagem por gyrator (dos Santos,;
Ortmann, 2011) as correntes médias injetadas ou
drenadas em cada porta, são determinadas por (5).
4249
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
Uma alternativa então é garantir que o ângulo
entre as tensões das portas 2 e 3 seja sempre nulo
I 2 g 21V1 g32V3
I 3 g32V2 g31V1
onde
0 , o que forçará a corrente I
(5)
32
táticos entre as portas i e j.
onde k 1
6 afL
tornar-se
nula. Isto é conseguido acionando com o mesmo
comando as chaves correspondentes das portas 2 e 3.
Levando essa restrição para as equações (5) e (6)
determina-se que funcionando como DAB de alto
ganho, as correntes nas portas 2 e 3 são dadas somente por (7) e (8).
g ij , dados por (6), são os coeficientes giros g 21 k 21 21 ;g31 k 31 31
k
g32 32 32
a
M
(6)
I 2 g21V1 k 21 21 V1
(7)
e
(8)
I3 g31V1 k 31 31 V1
ij
i 2,3e j 1, 2ei j
ij ij ij 1
Assim, o conversor pode ser modelado como se
mostra na Figura 7. Nessa situação, aplicando-se as
Leis de Kirchhoff para as correntes, e considerando o
sistema em regime permanente, têm-se as relações
(9)
Desta forma, um circuito equivalente do lado de
mais alta tensão do conversor é mostrado na Figura
5. Percebe-se que a fonte de tensão da entrada aparece na saída como fontes de corrente em série, que
possuem uma relação cruzada através do coeficiente
girostático g32.
Figura 5. Modelo equivalente simplificado do lado de alta tensão
do conversor DAB+DAB.
Dependendo da modulação aplicada, o conversor DAB+DAB pode funcionar como um DAB de
alto ganho ou controlando a tensão em uma rede cc
bipolar. Os dois modos de funcionamento serão sucintamente explorados nos itens seguintes.
Figura 6. Condições de tensões nulas nas portas 2 e 3: (a)
32 0 ; (b) 32 0 .
2.3 Conversor funcionando como um DAB de Alto
ganho
Sempre que o ângulo de defasagem entre as por-
tas 2 e 3 for diferente de zero 32 0 , haverá
um fluxo de potência entre elas. Nessa situação, em
malha aberta, e alimentando cargas passivas, uma
das portas assumirá toda tensão de saída e a tensão
na outra cairá para zero. Na Figura 6 ilustra-se essa
situação.
Para evitar este cenário, pode-se controlar as
tensões no barramento total e intermediário. Todavia
essa estratégia perde o sentido visto que do lado de
alta tensão somente a porta 4 fornecerá/receberá potência.
Figura 7. Modelo simplificado do conversor DAB+DAB
funcionando como um DAB de alto ganho.
I 2 g12V1 I R 2 I 4
I 3 g31V1 I R 3 I 4
I I I
R3
R2
M
4250
(9)
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
HV ( s )
Aplicando-se a condição de IM=0 nas equações
(9) (condição imposta por 32 0 ), e sendo
planta.
V4 V2 V3 chega-se a (10), (11) e (12).
g31V1 g12V1
V3 V2
R3
R2
R
V4 V2 1 3
R2
Então, se
R4
é a função de transferência da
Ceq R4 s 1
2
Sendo 1
, g pode ser aproxi
mado por (16), e a equação (15) é reescrita como
(17).
2
(16)
g k 1
(10)
(11)
(12)
ˆ
Vˆ4 HV (s)G
R3 R2 , implica em V3 V2 e
(17)
onde G é o ganho no ponto de operação dado por
(18).
V4 2V2 2V3 . Nessa situação, independente da
2
G k 1
V1
carga conectada na porta 4, a tensão medida nas portas 2 e 3 sempre será a metade da tensão total. Assim, neste cenário, pode-se controlar somente a tensão no barramento total de saída.
Um circuito equivalente para o desenvolvimento
do controle é mostrado na Figura 8.
(18)
Na Figura 9 mostra-se a malha de controle para
a tensão de saída do conversor, onde kv é o ganho do
sensor de tensão, kT representa todos os ganhos do
laço direto (como por exemplo modulador phaseshif, modulador PWM, etc.)
Figura 8. Simplificação do circuito de saída do conversor para
determinação do controle.
Este circuito é encontrado fazendo-se as seguintes considerações:
Figura 9. Malha de controle para a tensão de saída do conversor
funcionando como um DAB.
2.4 Conversor funcionando em uma rede cc bipolar
O transformador é totalmente simétrico;
As resistências R2 e R3 são resistências para descarga dos capacitores, logo têm valor muito elevado e podem ser desprezadas, pois suas correntes são baixíssimas;
A corrente que passa nas fontes em série é a
mesma g31V1 g12V1 gV1
Nessa situação, todas as portas do conversor podem fornecer e/ou receber potência. Destarte, neste
cenário de operação as tensões no barramento total e
no ponto médio devem ser controladas.
Considera-se novamente a Figura 5 e aplica-se
uma perturbação no conjunto de equações (5), determinando-se assim (19)
C2=C3=C, então, então Ceq=C/2.
Da Figura 8 tem-se (13), que após aplicar-se
uma perturbação em torno do ponto de operação e
desprezar-se os termos de segunda ordem chega-se a
(14).
I gV1
(13)
I gV1 gV1
(14)
Resolvendo (19) e desprezando-se os termos de
segunda ordem chega-se a (20).
I 2 g 21V1 g 21V1 g32V3 g32V3
I 3 g32V2 g13V1 g31V1 g31V1
Considerando a variação da tensão de entrada
como uma perturbação do sistema, a função de transferência para controle da tensão de saída é determinada por (15).
V4 HV (s) I
I 2 I 2 g 21 g 21 V1 V1 g32 g32 V3 V3
(19)
I
I
g
g
V
V
g
g
V
V
32
32
2
2
31
31
1
1
3 3
Adotando
ij i j ,com 1 0 (referência
angular), chega-se a (21).
(15)
Onde
4251
(20)
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2 21
0
g 21 k 21 1
2 31
0
g31 k31 1
k
g A B
21
32 a 31
compensador feedback e utilizar malhas de tensões
separadas ou compartilhadas, como mostrado na Figura 11.
Uma sugestão de controle deste artigo é inserir
uma malha feedforward para amenizar a interferência
cruzada entre as tensões das portas. Na Figura 12 (a)
e (b) mostra-se a inserção da malha feedforward na
situação de malhas de tensões separadas e compartilhadas.
Na situação de malhas de tensões separadas, os
compensadores X e Y são determinados por (25).
(21)
onde
g32
g
;Y 32
(25)
X
G22 kv
G11kv
Na situação onde as malhas de tensões são compartilhas, considerando-se V4 2V2 , o compensador
X é determinado por (26).
2 31 221
0
0
A 1
(22)
2 210 2310
B 1
Substituindo-se (21) em (20) e fazendo-se as devidas simplificações, chega-se a (23).
I 2 G1121 G1231 g 21V1 g32V3
I 3 G2231 G2121 g32V2 g31V1
(23)
onde
2
2 210 a 231
210
0
G kV3 1
1
11
a
k
kV3 2 310 a 2210
1
G12
k
a
(24)
2
2
210
kV
a 310
G21 2 1
k
a
2
2 31
2
310
kV2
0
a 210 1
1
G
22
k
a
Figura 11. Controle das tensões de saída com compensador
feedback;(a)-malhas separadas;(b)-malhas compartilhadas.
Desta forma, o modelo de pequenos sinais do
conversor é apresentado na Figura 10. Observa-se
que as correntes das portas 2 e 3 e consecutivamente
suas tensões sofrem influências da variação da tensão
da porta 1. Também, devido à regulação cruzada, as
portas têm influências mútuas de tensão.
Figura 12. Controle das tensões de saída com malhas feedback e
feedforward.
X
g32
2G22 kv
(26)
Figura 10. Modelo de pequenos sinais do conversor DAB+DAB.
2.5 Discussões sobre os métodos de controle das
tensões
A. Controle com malhas de tensões separadas
Então para o controle da tensão de saída pode-se
inicialmente utilizar como variável de controle apenas o ângulo de defasagem, fazendo-se uso de um
4252
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
utilizando a equação (28). A função de transferência
da malha de tensão total é obtida observando a Figura 7 e impondo que os componentes das portas 2 e 3
são iguais, ou seja, possuem os mesmos parâmetros
(R2=R3=Ro, C2=C3=C). Após isto, tem-se a função
de transferência HV4 que é dada por (29).
Nesta estratégia, é feito o sensoriamento das tensões das portas 2 e 3 separadamente, tratando o conversor como dois conversores com saída independente. Na Figura 13 mostra-se um diagrama ilustrando o
circuito de saída.
HV4 ( s) 2
Ro
CRo s 1
(29)
3 Simulações computacionais e resultados experimentais
C. Resultados experimentais em malha aberta.
Um conversor DAB+DAB foi construído e testado no laboratório. Na Tabela 1 mostram-se os dados do conversor. Como interruptores foram utilizados o IGBT IRGP50B60PD. O transformador foi
construído com o núcleo Thorton NEE 55/28/25. Os
três enrolamentos foram alocados na perna central do
núcleo, sendo o enrolamento primário mais interno e
o terciário o mais externo.
Figura 13. Controle das tensões por malhas separadas.
As funções de transferência das plantas são dadas por (27) e (28).
HV2 ( s)
R2
C2 R2 s 1
(27)
HV3 ( s)
R3
C3 R3 s 1
(28)
Tabela 1. Dados do conversor DAB+DAB construído.
B. Controle com malhas de tensões compartilhadas
Grandeza
(V1; V2; V3) tensões das portas
(L1,;L2,;L3) indutâncias externas
a
P(potência nominal)
f (frequência de comutação)
C2,C3 (capacitores de saída)
A diferença principal entre esta técnica e a anterior, é que agora é utilizada uma malha de controle
comum para ambas às saídas internas. A tensão total
de saída é mensurada, e como possui uma ondulação
reduzida, pode oferecer um controle com uma dinâmica mais rápida para a tensão V4.
Uma segunda malha de controle de tensão atua
no outro ângulo de defasagem com o propósito de
garantir o equilíbrio da tensão no ponto médio. Na
Figura 14 mostra-se o um esquema ilustrativo neste
cenário.
Para que haja um desacoplamento entre as malhas, a malha de tensão do ponto médio deve possuir
uma dinâmica relativamente lenta, em relação à malha de tensão do barramento total.
Valores
(50;100;100;)V
(11;44;44) μH
2
500W
50kHz
15 μF
Para o acionamento do conversor foi utilizado o
dsPIC 33EP64GP, no qual foi inserido o programa
de comando em malha aberta e em malha fechada.
Como teste inicial da nova topologia, resolveuse construir um protótipo de baixa potência. Além
disso, nos testes experimentais, quando a potência foi
elevada, ocorreram picos de tensões queimando alguns interruptores o que limitou os testes a uma potência máxima de 140W, igualmente dividida entre
as portas 2 e porta 3. A corrente na indutância primária é mostrada na Figura 15. Na Figura 16 mostramse as correntes nas indutâncias secundárias. A discrepância nos valores entre as correntes nos indutores secundário e terciário deve-se ao fato dos mesmos não serem exatamente iguais, e da forma construtiva do transformador.
Na Figura 17 mostram-se as tensões nas portas 2
e 3 do conversor (a porta 4 não tem carga). Observase que as mesmas têm módulos iguais, mas são simétricas, o que caracteriza uma saída bipolar.
Figura 14.Controle com malha de tensão compartilhada.
A função de transferência da porta 3 é encontrada de maneira similar à situação anterior, ou seja,
4253
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
Figura 15. Corrente na indutância primária.
Figura 18. Tensão na porta 2 com degrau de carga.
Figura 19. Tensão na porta 3 com degrau de carga na porta 2.
Figura 16. Correntes nas indutâncias secundárias.
Figura 20. Tensão na porta 4 com degrau de carga na porta 2.
Figura 17. Tensões nas portas 2 e 3.
D. Resultados de simulações computacionais e experimentais em malha fechada.
Foram realizadas simulações computacionais
com o conversor em malha fechada. A técnica escolhida para controle foi a de malhas de tensões separadas, com e sem o compensador feedforward.
(Figura 11(a) e Figura 12(a)). Um compensador PI
convencional foi utilizado na malha feedback. Foram
dados degraus positivos e negativos de carga na porta 2. Nas Figura 18,Figura 19 e Figura 20, mostramse as tensões nas portas 2,3 e 4 respectivamente.
Figura 21. Tensão nas portas 2 e 3 com degrau de carga na porta 2.
4254
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
Observa-se que o compensador feedforward melhora a dinâmica do sistema, diminui os picos de tensões durante o transitório e reduz a influência da tensão de uma porta sobre a outra.
Engelenk ,K. et al (2006). Small-scale residential dc
distributuin systems.In:IEEE Benelux Young
Researches Symposium in Electrical Power
Engeineering.
Heldwein, M.L.(2009). Microredes em corrente
continua:qualidade de fornecimento eficiência
em futura redes de distribuição. Florianópolis,
Brasil:[s.n].2010.Monografia
entregue
ao
concurso public 23080.012809/2009-83 da
Universidade Federal de Santa Catarina.
Kakigano ,H. et al(2008). Fundamental characteristic
of de microgrid for residencial houses with
cogeneration system in each house.In Power and
Energy Society General Meeting-Conversion
and Delivery of Electrical Energy in the 21st
Century.2008.
KARLSSON,P(2002). DC distributed power
systems – analysis, design and control for a
renewable energy system. Tese (de Doutorado
em Engenharia Elétrica Industrial) — Lund
University, Suécia, 2002.
Lago,Jackson (2011).Redistribuidor de Correntes
para Redes de Distribuição em Corrente
Continua Bipolares.Dissertação de Mestradoem
Engenharia Elétrica na Universidade Federal de
Santa Catarina.
Lago,Jackson;Heldwein,M.L(2011).Operation and
Control Oriented Modeling of a Power
Converter for Current Balancing and Stability
Improvement of DC Active Distribution
Networks.In: IEEE Transactions On Power
Electronics.
Salomonsson,D. (2008).Modeling, control and
protection of low-voltage DC microgrids.Tese
(de Doutorado em Engenharia Elétrica)-Royal
Institute of Technology (KTH),Suécia,2008.
SALONEN,P.et al (2008). An lvdc distribution
system concept. In:Nordic Workshop on Power
and Industrial Electronics (NORPIE).
Su, Gui-Jia; Peng, F,Z; Adams, D.J.Experimental
Evaluation of a Soft-Switching DC/DC
Converter for Fuel Cell Vehicle Applications.
Oak Ridge National Laboratory.
Na Figura 21 mostra-se o resultado experimental
obtido com degrau de carga na porta 2. Ressalta-se
que como as tensões nas portas não foram perturbadas
pelo degrau de carga, somente o controle com compensador feedback foi suficiente.
4 Conclusão
Foi realizada a modelagem e o controle de um
novo conversor, denominado aqui de DAB+DAB.
Observou-se que o controle do conversor possui resposta rápida e erro em regime desprezível, o que o
torna eficiente, tanto funcionando como um DAB de
alto ganho ou como um link para redes cc bipolares.
Através de simulações computacionais, observou-se
a influência positiva da malha feedforward proposta.
Os resultados experimentais em malha aberta mostraram que o conversor tem saída simétrica bem regulada. O conversor tem potencialidade de ser utilizado
em rede cc bipolar.
Agradecimentos
Os autores agradecem a CAPES, FINEP e ao
CNPQ pelo aporte financeiro para o desenvolvimento das pesquisas, e ao INEP (Instituto de Eletrônica
de Potência) pelo suporte logístico e de infraestrutura
necessária para o desenvolvimento deste trabalho.
Referências Bibliográficas
De Doncker, R. W. A. A.; Divan, D. M.;
Kheraluwala, M. H.,(1991) A three-phase softswitched high-power-density DC/DC converter
for
high-power
applications,
,
IEEE
Transactions on Industry Applications, vol. 27,
n°. 1, pp. 63-73, 1991.
dos Santos, W. M.; Ortmann, M. S.; Schweitzer, R.
et al.(2011), Design and Conception of a DAB
Converter (Dual Active Bridge) Using the
Gyrators Theory. Power Electronics Conference
(COBEP), 2011 Brazilian, vol., pp. 359-364,
11-15 Sept.
dos Santos, W.M. Estudo e Implementação do
Conversor TAB (Triple Active Bridge) Aplicado
a Sistemas Renováveis Solares Fotovoltaicos.
Dissertação de Mestrado.Universidade Federal
de Santa Catarina,Instituto de Eletrônica de
Potência,Junho,2011.
Duarte, J. L.; Hendrix, M.; Simoes, M. G.( 2007).
Three-Port Bidirectional Converter for Hybrid
Fuel Cell Systems, IEEE Transactions on Power
Electronics, Vol. 22, n°. 2, pp. 480-487.
4255