Instrumentação e Técnicas de Medidas
Sensores Resistivos
Sensores resistivos (potenciômetros, termistores, rtd, strain-gage, ...)
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
1
Controle de Versões
2013
Versão 1 – Com base nas notas de aula de COB783 e Op Amp Applications
Handbook, Section 4, edited by Walt Jung (Newnes, 2006).
Versção 1.1 – Ordem dos capítulos, equações mais comuns para linearização de
termistor.
Última alteração: 01/09/2013
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
2
Índice
7 Transdutores Resistivos....................................................................................................................4
7.1 Transdutor Potenciométrico......................................................................................................4
7.1.1 Características Gerais........................................................................................................7
7.2 Termistores...............................................................................................................................7
7.2.1 Características Gerais......................................................................................................13
7.3 Resistências termômetro (RTD).............................................................................................13
7.3.1 Características Gerais......................................................................................................15
7.3.2 Strain Gauge....................................................................................................................15
7.4 Outros Transdutores Resistivos..............................................................................................21
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
3
7 Transdutores Resistivos
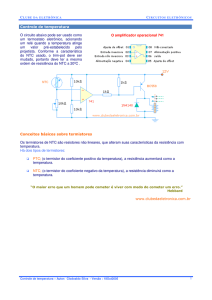
7.1 Transdutor Potenciométrico
É basicamente um potenciômetro, devidamente excitado (transdutor ativo segundo a nossa
definição prévia), no qual a tensão variável obtida no cursor é modificada em decorrência da ação
de alguma variável mecânica, tal como uma força ou aceleração.
Este é um tipo de transdutor considerado como um transdutor de grande variação de sinal
uma vez que a saída pode variar de 0 até 100% da tensão de excitação. Existem, na prática, vários
tipos de potenciômetros possíveis de serem utilizados na construção deste tipo de transdutor, sendo
cada tipo responsável pelas características finais do mesmo. Dentre os diversos modelos podemos
citar os de deslocamento linear e rotativo (figura acima), de cordinha (para medida de
deslocamentos), em fita (para medida de deslocamentos ou pressão), colabável (para medida de
nível de líquido), com líquido condutor (para medidas de inclinações), entre outros. Além disto
existem potenciômetros múltiplos (múltiplos potenciômetros controlados por um mesmo elemento)
ou que implementam diversos tipos de funções não lineares.
Neste texto nos ateremos aos potenciômetros lineares conectados a um circuito cuja
impedância de entrada é RL. Para estes casos a análise do circuito nos mostra que
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
4
v out =v in⋅
R L // x⋅R p
,
R L // x⋅R p1− x⋅R p
mas considerando R L =⋅R p
⋅R p⋅x⋅R p
⋅R p x⋅R p
v out =v in⋅
⋅R p⋅x⋅R p
1−x ⋅R p
⋅R p x⋅R p
⋅x⋅R2p
v out =v in⋅
⋅x⋅R2p⋅1−x ⋅R2p x⋅1−x ⋅R2p
⋅x
v out =v in⋅
x⋅1− x
Porém seria desejável que a saída expressasse somente o deslocamento x, isto é
v out
=x (caso obtido com R L =∞ )
v in
Se o erro relativo entre a função de transferência real e a ideal for definido como
erro=
v out
v in
−
real
v out
v in
v out
v in
ideal
ideal
então
⋅x
−x
x⋅1− x
erro=
x
erro=
−x⋅1−x
x⋅1− x
Derivando-se a função de erro com relação a x e igualando-a a zero, obtém-se a posição de
erro máximo
∂ erro [ x⋅1− x]⋅2⋅x−1−x⋅1− x⋅2⋅x−1
=
=0
∂x
[x⋅1−x ]2
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
5
∂erro ⋅ 2⋅x −1 x⋅1−x ⋅2⋅x−1−x⋅1− x⋅2⋅x−1
=
=0
∂x
[x⋅1−x ]2
⋅2⋅x−1
∂ erro
=
=0
∂x
[ x⋅1− x]2
logo
⋅2⋅x−1=0
x=0,5
Então o maior erro, em relação ao valor ideal, ocorre quando o cursor está no meio do curso,
sendo que tal erro é igual a
erro máx =erro x=0,5 =
erro máx =
−0,25
0,25
erromáx =
−1
1
0,25
erro máx =
−1
14⋅
−x⋅1−x
x⋅1−x
Ou seja, o erro máximo é função de α, como esperado. Supondo-se =1 ( R L =R p ) temos
erromáx =
−1
=20 %
14
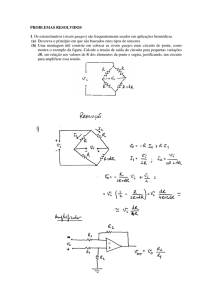
Na figura abaixo são apresentadas as curvas de erro absoluto e relativo com relação a
posição x além dos valores de v(out) para o caso ideal e real onde a vin=1V, RL=10kΩ e RP=10kΩ.
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
6
7.1.1 Características Gerais
Parâmetro
Faixa
Resolução
Linearidade
Potenciômetro Linear
Potenciômetro Rotativo
2 mm até 8 m
10º até 60 voltas
50 μm
2º até 0,2º
0,002% FSO até 0,1% FSO
Velocidade máxima
10 m/s (restrições mecânicas)
Frequência máxima
3 Hz (restrições mecânicas)
Potência
0,1 W (plástico condutivo ou híbrido) até 50 W (fio)
Resistência
Coeficiente Térmico
Vida útil
Vantagens
Desvantagens
20 Ω até 220 kΩ
20·10-6/ºC (fio) até 1000·10-6/ºC (plástico condutivo)
108 ciclos (plástico condutivo)
Fácil de usar, baixo custo, não eletrônico, alta amplitude do sinal
Limitado em frequência, atrito e inércia, desgastes
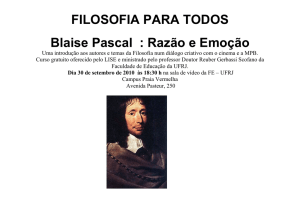
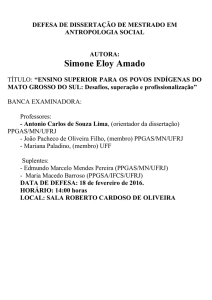
7.2 Termistores
São resistores sensíveis à temperatura, que apresentam resistência variando com coeficiente
negativo com temperatura (NTC – os mais comuns para medidas de temperatura) ou positivo (PTC,
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
7
muito usado em circuitos de proteção, uma vez que a sua resistência aumenta repentinamente com a
temperatura e, limitando a corrente do circuito – algumas vezes estes componentes são chamados de
fusistor e estão disponíveis para uma ampla gama de temperaturas).
R
10 6
PTC
Termistor
10 5
10 4
Termômetro
de resistência
de silicio
10 3
RTD
Platina
10 2
NTC
Termistor
10 1
-100
0
100
200
oC
Comparação entre diferentes tipos de sensores de temperatura. Sensors in Biomedical
Applications, Fundamentals,Technology and Applications, Gárbor Harsányi, CRC Press, 2000
Os materiais classicamente utilizados na construção de termistores são semicondutores, uma
vez que a sua resistividade é muito maior do que a resistividade dos metais condutores. A
resistência de um termistor pode ser descrita (numa faixa de uns 50ºC) aproximadamente por uma
exponencial:
(
β⋅
R(T )=R0⋅e
1 1
–
T T0
)
onde R0 é a resistência na temperatura de referência T 0 (normalmente 25ºC); é uma
constante que depende do material de construção (normalmente entre 2000 K e 5000 K); T é a
temperatura em Kelvin.
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
8
Tomando-se o logaritmo natural dos dois lados
ln [ R T ]=
− ln [ R0 ]
T T0
Chamando o recíproco da temperatura de lambda
(Λ = T1 )
ln [R T ]=⋅−⋅0ln[ R0 ]
que é uma função linear de (onde é a inclinação da curva ln [R T ] versus ).
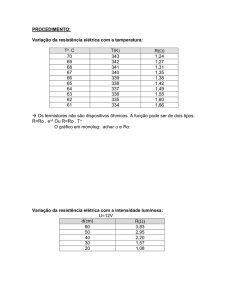
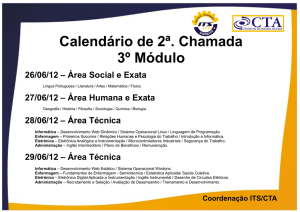
Na forma direta, a curva típica de um termistor é mostrada na figura abaixo, onde os valores
2000 K até 5000 K correspondem aos valores de β.
Curvas características de NTCs comerciais (Epcos – Electronic Parts and Components)
Alguns manuais e livros informam o coeficiente de temperatura da resistência ( α ), ou seja,
a variação relativa da resistência com a temperatura.
α=
dR(T ) /dT −B
= 2
R(T )
T
que mostra uma variação não linear da resistência com a temperatura.
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
9
Este modelo exponencial normalmente permite medidas com erro de ±0,3ºC para uma faixa
dinâmica de 50ºC. Modelos mais sofisticado poderiam ser o modelo de três parâmetros, que leva o
erro para ±0,01ºC numa faixa dinâmica de 100ºC, ou o modelo de quatro parâmetros que leva a
erros de 0,00015ºC na faixa de 0 a 100ºC. As equações para estes modelos são
(
R(T )=R ⋅e
0
B C
A+ + 3
T T
)
e R(T )=R ⋅e(
0
B C D
A+ + 2 + 3
T T T
)
Se a exatidão não for importante este sensor pode ser linearizado com associação de
resistores. Isto pode ser conseguido, para uma faixa limitada de temperatura, colocando-se um
resistor fixo em paralelo com o termistor. Embora isto acarrete uma redução na sensibilidade do
dispositivo, a sensibilidade original do termistor é relativamente alta, o que ainda garante um
resultado final satisfatório. Neste caso os erros obtidos estão na faixa dos 2,5%.
Linearização de NTC com resistência em paralelo (Epcos – Electronic Parts Components)
A associação paralela entre o termistor R(T) e um resistor de valor fixo RP é dada por
R=
R P⋅RT
, onde R P é o resistor de compensação e RT é o termistor.
R P RT
Uma linearização simples em torno de uma só temperatura (a temperatura central da
medida) pode ser obtida fazendo com que neste ponto a curva da resistência R tenha um ponto de
inflexão. Assim
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
10
R2P
dR
dR
=
⋅ T
2
d T ( RT + R P ) dT
d2R
dT 2
∣
=0
T =T C
β−2⋅T C
Rp= RTC⋅
β+ 2⋅T C
Uma linearização também comum, e que envolve uma faixa de operação pode ser obtida
para qualquer função não linear fazendo com que variações iguais de temperatura correspondam a
variações iguais na resistência equivalente. Assim para temperaturas extremas T1 (mais alta) e T3 (a
mais baixa) podemos escrever
T 1−T 2=T 2−T 3
RT1 – RT2 =RT2 −RT3
R P⋅RT1
−
R P⋅RT2
=
R P⋅RT2
−
R P⋅RT3
( R P + RT1 ) ( R P + RT2 ) ( R P + R T2 ) ( R P + R T3)
Rp=
RT2⋅( RT3 + RT1)−2⋅RT3⋅RT1
.
RT3 + RT1 – 2⋅RT2
A figura abaixo mostra um gráfico de R(T) linearizada por diferentes resistências RP.
Os termistores podem operar em três faixas distintas de funcionamento caracterizadas pela
sua curva v x i. A figura abaixo mostra um exemplo de curva v x i de um dado termistor obtida a
temperatura constante.
Na curva observa-se uma região linear (onde o autoaquecimento é desprezível) utilizada
para medida de temperatura, uma região de máximo e outra onde a tensão diminui com o aumento
de corrente. Esta região pode ser utilizada em função do autoaquecimento do transdutor (limitadores
de corrente, sensores de nível para líquidos, sensores de fluxo, entre outros).
Uma especificação importante de um termistor é sua constante de dissipação ( δ ), definida
como a potência (em miliwatts) que causa um aumento de 1ºC de autoaquecimento, para uma dada
temperatura. Valores típicos de tal constante são de 0,5 a 10mW/ºC, sendo a faixa típica de
temperatura de -55ºC a 150ºC.
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
11
Curva V x I de termistores (Epcos – Electronic Parts and Components)
Uma outra importante especificação é a constante de tempo térmica, definida como o tempo
necessário para o termistor atingir 63,2% da diferença entre as temperaturas inicial e final do seu
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
12
corpo, quando é submetido a uma mudança abrupta da temperatura (idealmente uma função
degrau), assumindo-se uma condição de potência nula. Valores típicos da constante de tempo
térmica vão de 1 a 50s.
Termistores podem apresentar uma razoável estabilidade com o tempo apenas em casos de
pré envelhecimento. Nestes casos é possível obter variações equivalentes a 0,01ºC para uma faixa
de 70ºC. Uma estabilidade intermediaria pode ser obtida cobrindo o elemento sensor com vidro mas
a contante térmica ficará pior. Além disto termistores raramente são intercambiáveis, ou seja, se um
precisar ser substituído então o circuito precisará reajustado.
7.2.1 Características Gerais
Parâmetro
Faixa de temperatura
-100ºC até 450ºC
Resistência em 25ºC
0,5Ω até 100 MΩ (1kΩ até 10MΩ)
β
2000K até 5500K
Máxima Temperatura
300ºC contínuo ou 600ºC intermitente
Constante de Dissipação
1mW/ºC (ar) ou 8mW/ºC (óleo)
Contante de Tempo Térmica
1ms até 22s
Máxima Potência Dissipada
1mW até 1W
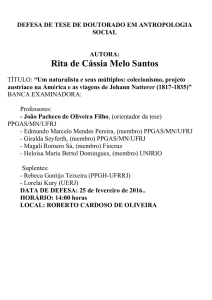
7.3 Resistências termômetro (RTD)
São resistências dependentes da temperatura. Normalmente estas resistências são obtidas a
partir de metais ou ligas metálicas. Costumam ser muito lineares, muito estáveis (desvios de
0,1ºC/ano em ambiente industrial e 0,0025ºC/ano em laboratórios) e muito exatos. Seu coeficiente
de temperatura é positivo e é capaz de operar em uma faixa de temperatura muito maior que a dos
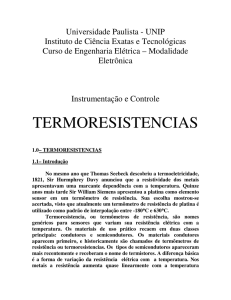
termistores. A figura abaixo exibe o formato de alguns encapsulamentos para os RTD e a curva de
resistência relativa em função da temperatura para os principais materiais utilizados. Observe que
dependendo do encapsulamento o RTD pode apresentar um comportamento de primeira ou segunda
ordem em função da massa e da transmissão de calor do conjunto.
Os materiais resistivos exibem uma variação da resistência com a temperatura porém nem
todos possuem características estáveis. Os materiais mais utilizados para este tipo de sensor são a
platina, o níquel e o cobre cuja equação característica e seus coeficientes são apresentados a seguir.
2
3
RT =Ro⋅1⋅T −T 0 ⋅T −T 0 ⋅T −T 0 ...
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
13
onde R0 é a resistência de referência na temperatura T0 (normalmente 0ºC). O nome dos
RTD é definido pela sigla do material do qual o sensor é feito seguido do valor da resistência R0. O
RTD mais comum é o PT100, ou seja sensor de platina de 100Ω, por ser oferecer uma boa relação
de compromisso entre sensibilidade e estabilidade e linearidade.
α (10-6Ω/Ω/K)
Material
γ (10-6Ω/Ω/K3)
β (10-6Ω/Ω/K2)
Platina (0 – 850ºC)
3907
-0,5768408
Níquel (-50 – 1809ºC)
5470
6,39
Cobre (-50 – 180ºC)
42160
0,0069
R/R 0
Niquel
7
Cobre
6
5
Platina
4
3
Tungstênio
2
1
0
200
400
600
800
1000
oC
Measurement & Instrumentation Principles, Alan S Morris, Butterworth Heinemann, 2001
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
14
Estes transdutores apresentam resistência desde uma dezena de Ω até dezenas de kΩ. Assim
como nos termistores se deve evitar correntes de autoaquecimento (normalmente da ordem de
20 mA ou menos) e deformação física que podem fazer com que estes transdutores funcionem
como strain-gauges (mostrados a seguir). Estes transdutores apresentam resposta dinâmica lenta,
entre 0,5 e 5 segundos (aumenta com o encapsulamento) mas precisão de 0,01%, elevada
sensibilidade, comportamento razoavelmente linear em torno de um ponto de operação, saída
estável por longa faixa de tempo.
O autoaquecimento pode ser controlado por meio do fator de dissipação ou contante de
dissipação de calor dos termistores δ que define a potência necessária para aquecer o sensor de
1ºC. O fator de dissipação normalmente é informado em mW/K e para duas condições distintas,
para o sensor imerso em ar ou imerso em água.
7.3.1 Características Gerais
Parâmetro
Platina
Cobre
Níquel
Molibdênio
Faixa (ºC)
-200 até 850
-200 até 260
-80 até 320
-200 até 200
α (Ω/Ω/ºC)
0,00385
0,00427
0,00672
0,003786
10,6
1,673
6,844
5,7
25, 50, 100, 200,
500, 1000, 2000
10
50, 100, 120
100, 200, 500,
1000, 2000
Resistividade (20ºC – μΩm)
R (0ºC)
7.3.2 Strain Gauge
Um strain gauge é um elemento resistivo que produz uma mudança na sua resistência
elétrica em função de uma deformação mecânica (strain). São dispositivos que apresentam
pequenas variações de sinal e que são normalmente utilizados com uma ponte de Wheatstone. Dois
tipos são disponibilizados, os limitados e os não limitados. Os primeiros são dispositivos montados
em estruturas mecânicas que limitam deformação acima de um determinado valor (estes estão
comercialmente disponíveis). Já os não limitados são aqueles onde a deformação pode ser qualquer,
inclusive assumindo valores que podem causar a destruição dos mesmos (normalmente formados
apenas pelo elemento sensor). Os tipos não limitados são, normalmente, mais lineares que os
limitados. Na figura abaixo, todos os sensores são do tipo limitado.
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
15
Lembrando que a resistência deste fio é
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
16
R=
ρ⋅L
A
∂ R ∂ ρ⋅L
=
∂R ∂R A
∂ R ∂ ρ⋅L ∂ρ ∂ ρ⋅L ∂ L ∂ ρ⋅L ∂ A
=
⋅ +
⋅ +
⋅
⋅
∂ R ∂ρ A ∂ R ∂ L A ∂ R ∂ A A ∂ R
( )
( )
( )
L ∂ρ ρ ∂ L ρ⋅L ∂ A
1= ⋅ + ⋅ − 2 ⋅
A ∂R A ∂R A ∂R
ρ
ρ⋅L
L
∂ R= ⋅∂ ρ+ ⋅∂ L− 2 ⋅∂ A
A
A
A
Dividindo-se por
ρ⋅L
A
ρ
ρ⋅L
∂R
L
A
= ⋅∂ρ+ ⋅∂ L− 2 ⋅∂ A ⋅
R
A
A
ρ⋅L
A
(
)
∂ R ∂ρ ∂ L ∂ A
= ρ +
−
R
L
A
Δ R Δρ Δ L Δ A
= ρ +
−
R
L
A
Consequentemente, a variação na resistência do elemento é causada por a) mudança relativa
do comprimento; b) mudança relativa na secção transversal e c) mudança relativa na resistividade.
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
17
Para elementos de secção transversal circular (grande maioria), a variação relativa da área
está ligada a variação de diâmetro.
A ⋅d d 2 −d 2
=
A
⋅d 2
Δ A d 2 +2⋅d⋅Δd + Δ d 2−d 2
=
2
A
d
e considerando-se Δ d 2≪ 2⋅d⋅Δ d ( d ≈10μ m )
Δ A 2⋅d⋅Δ d
=
2
A
d
Δ A 2⋅Δ d
=
A
d
Por outro lado a variação relativa de diâmetro está relacionada com a variação relativa de
comprimento através de chamada razão de Poisson ( ν ). Usualmente 0< ν< 0,5 sendo que para o
volume se manter constante é necessário que
ν=0,5 (caso da borracha e de fluidos
incompressíveis). A maioria dos materiais se deforma quando sobre ação de uma força modificando
o seu volume inicial. Para o ferro fundido a razão de Poisson vale 0,17, para o aço vale 0,303 e para
o alumínio e o cobre vale 0,33. Então
Δd
ΔL
=−ν⋅
.
d
L
Logo, podemos escrever a variação relativa de resistência como
Δ R Δρ Δ L Δ A
= ρ +
−
R
L
A
Δ R Δρ Δ L 2⋅Δ d
= ρ +
−
R
L
d
Δ R Δρ Δ L 2⋅ν⋅Δ L
= ρ +
−
R
L
L
ΔR ΔL
Δρ
=
⋅(1+ 2⋅ν)+ ρ
R
L
A variação de resistividade como resultado de um estresse mecânico é chamado piezo resistividade.
Ela ocorre em função da mudança na amplitude das vibrações na rede metálica. Uma extensão no material
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
18
acaba por reduzir a mobilidade dos elétrons e, por conseguinte, aumentar a resistividade dos materiais.
Bridgman mostrou quem em metais a variação relativa de resistividade é proporcional a variação relativa de
volume. Assim, a contantes C de proporcionalidade de Bridgman para o alloy (material do qual muitos
strain gauges são feitos) está entre 1,13 e 1,15 enquanto que para a platina C = 4,4. Assim
ΔR ΔL
ΔV
=
⋅(1+ 2⋅ν)+C⋅
.
R
L
V
Como
Δ V Δ L 2⋅Δ d Δ L
=
+
=
⋅(1−2⋅ν )
V
L
d
L
podemos escrever
ΔR ΔL
=
⋅[1+2⋅ν+C⋅(1+2⋅ν)]
R
L
Definindo-se agora um fator de gauge (me ou G em alguns livros)
ΔR ΔL
=
⋅me , e
R
L
me=
R/ R
.
L/ L
As deformações as quais os strain gauges são submetidos devem ser elásticas, para não danificar o
sensor. Nesta situação a tensão mecânica sobre os materiais produz uma deformação deste material que é
proporcional a força aplicada e ao chamado módulo de Young. Esta é a lei de Hook aplicada aos materiais.
σ=
F
ΔL
=E⋅ε= E⋅
A
L
onde σ é a tensão mecânica, F a força, A é área, E é o módulo de Young e ε é a deformação
(strain, em inglês).
Assim, os strain gauges costumam ser especificados em termos da sua deformação máxima ( ε ) que
é um admensional. Normalmente os valores desta deformação são da ordem de μ ε (microsstrains) que
corresponde a 10-6 m/m de deformação. Vários materiais podem ser usados para a confecção de strain gauge,
resultando em diferentes fatores de gauge e faixa de operação. Materiais isotrópicos, por exemplo,
apresentam me≈2 , materiais isoelásticos me≈3,2 , e a platina me≈6 . A .tabela seguinte mostra a
sensibilidade para strain gauges de diferentes materiais
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
19
Material
Sensibilidade (me)
Platinum (Pt 100%)
6,1
Platinum-Iridium (Pt 95%, Ir 5%)
5,1
Platinum-Tungsten (Pt 92%, W 8%)
4,0
Isoelastic (Fe 55.5%, Ni 36% Cr 8%, Mn 0.5%) *
3,6
Constantan / Advance / Copel (Ni 45%, Cu 55%) *
2,1
Nichrome V (Ni 80%, Cr 20%) *
2,1
Karma (Ni 74%, Cr 20%, Al 3%, Fe 3%) *
2,0
Armour D (Fe 70%, Cr 20%, Al 10%) *
2,0
Monel (Ni 67%, Cu 33%) *
1,9
Manganin (Cu 84%, Mn 12%, Ni 4%) *
0,47
Nickel (Ni 100%)
-12,1
A tabela acima mostra que as variações de resistência Δ R/ R são bastante pequenas. Normalmente
obtém-se somente alguns poucos milivolts na saída de um transdutor strain gauge. Variações maiores podem
ser obtidas com elementos como silício, que é um caso mais de piezo resistividade do que de variação de
dimensão. Nestes casos a mudança de resistividade com a tensão mecânica é maior do que a mudança de
dimensão como ocorre nos fios metálicos. Nos semicondutores a tensão afeta principalmente o número e a
mobilidade dos portadores e os efeitos piezo resistivos dependerão do tipo de material semicondutor, dos
seus portadores, e da orientação cristalográfica com relação ao força aplicada.
Para barras de silício tipo P com o eixo dominante na direção (1,1,1) teríamos, por exemplo, me(1,1,1)
da ordem de 100 a 175, sendo tal valor dependente de dopagem. Uma vez que um strain gauge de fio possui,
me entre 2 e 6, pode-se dizer que um strain gauge de silício é muito mais sensível que este.
É possível observar, entretanto, que a platina possui um fator de gauge relativamente grande e, por
suas características químicas, pode ser usada em ambientes corrosivos. Entretanto, a platina também é usada
como termômetro o que introduz erros por vezes inaceitáveis. Assim como a platina strain gauges
semicondutores são muito sensíveis a temperatura, na verdade, muito mais do que os strain gauges de metal.
Variações de temperatura representam uma fonte e erro ambiental expressiva nos
transdutores strain gauge. Em strain gauges metálicos este erro pode ser equivalente a 50 με/ºC.
Tais erros são divididos em erros de sensibilidade e erros de offset. Estes erros podem ser
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
20
compensados com strain gauges chamados dummy. Estes são strain gauges usados apenas para
medir a temperatura e compensá-la.
Parâmetro
Faixa
Fator de Gage
Resistência Nominal (Ω)
Tolerância
Metal
Semicondutor
0,1με até 50000 με
0,001 με até 3000 με
1,8 até 4,5
40 até 200
120, 250, 350, 600, …, 5000
1000 até 5000
0,1% até 0,35%
1% até 2%
Potência máxima
250mW
Corrente máxima
5mA até 25mA (base boa condutora de calor)
Frequência máxima
100kHz (tamanho menor que o comprimento
de onda)
Tamanho (mm)
0,4 até 150 (padrão entre 3 e 10)
1 até 5
7.4 Outros Transdutores Resistivos
Muitos outros transdutores resistivos estão disponíveis no comércio. Dentre os mais comuns
estão os magnetorresistivos, resistores dependentes da luz (LDR), resistores sensíveis a umidade e
gases.
Instrumentação e Técnicas de Medida – UFRJ, 2013/1
21