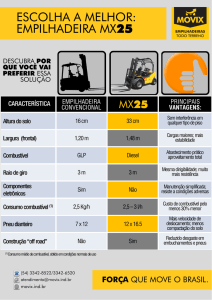
Aplicação: Empilhadeira - Elaborar um programa em assemply, com base no microcontrolador HCS-08, para efetuar o controle
de uma empilhadeira elétrica.
Dados gerais:
Os push buttons ligados em PTB4 e PTB7, definem o peso máximo suportado pela empilhadeira.
A chave ligada em PTB2 define sentido de giro das rodas da empilhadeira (0 = para frente e 1 = para trás).,
A chave ligada em PTB3 define o momento da partida (0 = partida e 1 = desliga motor e aguarda partida).
A chave ligada em PTA5 (interrupção externa) quando ativada, deverá acionar um aviso sonoro por 3 segundos ou 10
segundos, através de um dispositivo ligado em PTA3.
Através da leitura do canal de comunicação serial SCI, o tempo será de 3 ou 10 segundos (Interrupção SCI
de Recepção). Se receber do computador o valor 0x41 => 3 segundos
0x42 => 10 segundos
O potenciômetro, ligado ao canal AD do pino PTA0, está conectado a um acelerador e faz o ajuste de velocidade da
empilhadeira.
Para nível de tensão igual a 0V, o motor ligado em PTB5 (modo PWM) deverá ser desligado (nível lógico 0), e para
tensão igual a 3.3V, o mesmo deverá operar em velocidade máxima (ciclo ativo em 100%).
A saída PTB6 igual a 0 faz o motor ir para frente e 1 para trás.
O sensor de velocidade ligado ao canal AD do pino PTA2, gera um sinal de tensão de 100mV para cada km/h.
O sensor de peso ligado ao canal AD do pino PTA1, gera um sinal de tensão de 3,22mV para cada kg de carga.
Itens de segurança:
Para dar partida, a tensão em PTA0 deverá ser igual a 0V.
O motor só poderá mudar de sentido de giro com a empilhadeira parada.
A definição de carga máxima só poderá ser alterada se a empilhadeira estiver sem carga.
Se a velocidade da empilhadeira ultrapassar os 33 km/h o motor deverá ser desligado.
Se o peso da carga exceder o valor definido pelo usuário, a luz ligada em PTA4 deverá ser acionada (nível lógico 1).
Dados para configuração: Fpwm = 3,91kHz | Oscilador Interno | Prescaler = 1