PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ
CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA
LABORATÓRIO DE ENGENHARIA DA COMPUTAÇÃO
TUTORIAL DE UTILIZAÇÃO DA PLACA DE AQUISIÇÃO E CONTROLE M-3
RESUMO - Este artigo descreve a possibilidade de se estabelecer a
comunicação entre um hardware específico e um computador, utilizando a porta
serial disponível no PC. O modelo apresentado possui as características de ler até
quatro entradas analógicas e ainda possui 8 entradas ou saídas digitais.
1 INTRODUÇÃO
A placa de aquisição e controle de dados é indicada no desenvolvimento
de projetos rápidos e sem a necessidade de uma implementação de hardware muito
complexo.
O firmware M-3 facilita a utilização de entradas e saídas digitais,
contagem de eventos e controle de PWM, requerendo apenas um conhecimento
básico de eletrônica digital.
Com a integração do software com o hardware, exercitamos os
conhecimentos na implementação de programas que controlam um dispositivo
eletrônico.
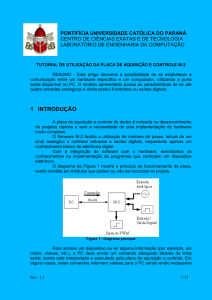
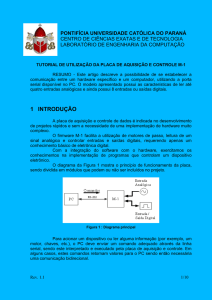
O diagrama da Figura 1 mostra o princípio de funcionamento da placa,
sendo dividida em módulos que podem ou não ser incluídos no projeto.
Figura 1 : Diagrama principal
Para acionar um dispositivo ou ler alguma informação (por exemplo, um
motor, chaves, etc.), o PC deve enviar um comando adequado através da linha
serial, sendo este interpretado e executado pela placa de aquisição e controle. Em
alguns casos, estes comandos retornam valores para o PC sendo então necessária
uma comunicação bidirecional.
O modelo M-3 consiste em:
Rev. 1.1
1/12
Microcontrolador Microchip PIC 16F876;
Interface Serial utilizando MAX-232;
Entrada contadora de eventos, 4 entradas;
Entrada/Saída Digital (IO), uma porta de 8 bits;
Saída de PWM, 2 saídas.
O módulo principal e o modulo da comunicação serial são essenciais
para o funcionamento da placa. O módulo de contagem de eventos, as
entradas/saídas (IO) e saídas de PWM são opcionais, pois são independentes e
aplicáveis de acordo com a necessidade do projeto.
2 PROCEDIMENTO DE MONTAGEM E TESTE
2.1 Aquisição do material
Este projeto requer apenas componente comercial. A aquisição do
microcontrolador Microchip PIC16F876-20/P pode ser feita através do seu
representante no Brasil, AUT-COMP, com sede em São Paulo. O contato deve
ser feito por telefone (11 – 6915-7443) e o seu custo é de aproximadamente US$
7,22 + 2% de IPI. A taxa de envio para Curitiba é de R$ 13,00. A forma de
pagamento é através de depósito bancário e o tempo para o envio é de
aproximadamente uma semana (dados obtidos em 11/09/2002).
Quanto aos outros componentes, podem ser encontrados nas lojas de
componentes eletrônicos. O motor de passo pode ter um custo alto se for
adquirido novo, porém há a opção de comprar um usado ou retirar de alguma
sucata de equipamentos como impressora, fax, scanner, e outros. Dê preferência
por motores de passo de 5 ou 6 terminais. Modelos com 4 terminais exigem um
circuito mais complicado.
Cuidado especial deve ser tomado quanto às características elétricas do
motor de passo, devendo a tensões e a correntes ser compatível com o circuito
montado. Por exemplo, se tivermos um circuito que funcione com 5V e possa
suprir no máximo uma corrente de 1A, não podemos ligar nele um motor que
consuma 2A ou que tenha uma tensão de alimentação de 2,8V, com risco de
danificar o circuito ou o motor. Os demais componentes necessários como
resistores e diodos têm seu custo mínimo e o preço pode variar muito
dependendo da loja.
2.2 Gravação do PIC:
A gravação do PIC deve ser feita através do gravador PICStart Plus e do
software MPLAB disponíveis no Laboratório de Engenharia de Computação.
Através do MPLAB (acessando o menu FILE->IMPORT->IMPORT TO MEMORY),
uma caixa de diálogo irá abrir e solicitando o caminho do arquivo M-3.HEX que
deve ser importado (ver Figura 2).
Rev. 1.1
2/12
Figura 2: Procedimento de gravação
Para habilitar o programador, selecione o menu PICSTART PLUS-> ENABLE
PROGRAMMER (Figura 3).
Figura 3: Habilitação do gravador
Ao habilitar o programador, uma nova janela deve abrir e o botão
PROGRAM deve ser pressionado, Figura 4. Neste instante a gravação é iniciada
e podendo demorar alguns minutos. Concluída a gravação, uma mensagem de
sucesso é exibida e o chip pronto!
Figura 4: Parâmetros de programação
Rev. 1.1
3/12
2.3 Modulo principal:
O módulo principal é composto do PIC, do MAX-232, do cristal, de um
resistor e do cabo serial. Sua montagem deve ser feita seguindo o esquema da
Figura 5.
O PIC deve ser alimentado com 5V no pino 20 e o GND nos pinos 8 e/ou
19. Um cristal oscilador de 4MHz deve ser ligado entre os pinos 9 e 10 e um
resistor de 1kΏ deve ser ligado no pino 1 para reset.
A interface serial tem como principal componente o MAX-232. Sua
função é conformar o sinal do padrão RS-232, que trabalha com níveis de tensão
de 12V a -12V, para o padrão TTL. São necessários quatro capacitores que
devem ser ligados, lembrando que os pinos de alimentação são respectivamente
os pinos 16 e 15, para Vcc (5V) e GND. Os pinos 9 e 10 são os pinos de TX e RX
que devem ser ligados ao PIC, pois trabalham com níveis TTL. Os pinos 7 e 8 são
ligados nos pinos 2 e 3 do conector DB-9, no qual o sinal é do tipo RS-232. O
GND do conector DB-9 (pino 5) deve ser ligado com o GND da placa,
necessariamente. A Figura 6 mostra como deve ser feito o cabo serial, tomando o
devido cuidado para não confundir os pinos de DB-9 com o DB-25.
Figura 5: Módulo principal
Figura 6: Cabo serial
Rev. 1.1
4/12
2.4 Teste inicial:
Para um teste inicial é necessário que o hiperterminal (Windows) seja
configurado corretamente conforme a seqüência
a) Execute o HIPERTERMINAL do Windows, criando uma nova
conexão, como mostra a Figura 7.
Figura 7: Nova conexão
b) Escolha qual porta serial será
direcionamos para a COM1, Figura 8
utilizada.
Normalmente
Figura 8: Escolhendo a porta serial
c) Por fim, conforme a Figura 9 configure:
a velocidade, em bits por segundo, para 9600;
o número de bits de dados, para 8;
a paridade para nenhuma;
o bit de parada para 1;
o controle de fluxo também para nenhum.
Rev. 1.1
5/12
Figura 9: Configurações gerais da porta serial
Para sabermos se o hiperterminal foi configurado corretamente,
devemos conectar o cabo serial na COM1 e realizar um curto-circuito entre os
pinos 2 e 3 da outra ponta do cabo. Quando uma tecla alfanumérica é
pressionada este caractere deve aparecer no hiperterminal.
Após montar o módulo conforme a Figura 5, conectá-lo ao computador. Ao ligar
este módulo, uma mensagem de apresentação deverá ser exibida no
hiperterminal conforme a Figura 10.
Figura 10: Mensagem inicial
Rev. 1.1
6/12
2.5 Configuração das mensagens e do eco do teclado
Figura 11: Configuração inicial
A placa de aquisição geralmente retorna ao usuário cada tecla digitada (eco) e
mensagens para facilitar a visualização. Porém, ao desenvolver uma aplicação no
computador, estas opções podem ser inconvenientes. Para ligar/desligar as
opções de exibir as mensagens e eco, use o comando CONFIG<ENTER>. Ao
digitar este comando, as mensagens da Figura 11 serão apresentadas permitindo
ativar ou não estas opções. Estas configurações permanecerão ajustadas mesmo
se o PIC for desligado1.
2.6 Módulo de leitura e escrita digital
O procedimento a seguir descreve um teste inicial para determinar o
funcionamento dos sinais de leitura e escrita digital.
Conforme a Figura 12, conecte os pinos da porta de IO (IO-0, IO-1, ...,IO-3) aos
LEDs da mesa digital, não esquecendo de ligar o GND da mesa no terra do
circuito. Ao digitar o comando WR01<ENTER> no hiperterminal, o primeiro LED
deve acender.
Obs.: para melhor explicação do comando WR verifique o item 3.
Para testar estes sinais como entrada, podemos ligar os pinos de IO nas
chaves de mesa digital. Ao digitar o comando RD<ENTER> no hiperterminal, será
exibida a leitura dos bits como um valor em hexadecimal.
Com estes testes podemos ter uma noção geral do seu funcionamento.
1
Estas configurações são salvas na memória EEPROM (não volátil).
Rev. 1.1
7/12
Figura 12: Pinos de IO
2.7 Contador de Eventos
Podemos testar o contador de eventos, ligando os respectivos pinos as
chaves da mesa digital, ao mudarmos o estado da chave de 1 para 0 e vice versa,
geramos os valores a serem contados. Temos três modos de leitura do contador
de eventos, pode ser por rampa de subida, rampa de descida e por nível.
Para iniciarmos a sua utilização, devemos usar o comando
ECON<ENTER>, que habilita o contador de eventos.
Para lermos os valores dos registros usamos, para ler o registro 1, por
exemplo, EC1RD<ENTER>. Este modelo possui 4 registros contadores de
eventos e para iniciarmos a contagem estes registros devem ser zerados através
do comando ECxCLR<ENTER>. O x representa o registro, que pode ser de 1 a 4.
A Figura 13 mostra os pinos correspondentes ao contador de eventos.
Figura 13: Contador de eventos
2.8 PWM:
Podemos testar o PWM, devemos ligar a saída de PWM ao osciloscópio
para vermos a variação do duty cycle. Devemos ajustar o duty para 50%, isto
Rev. 1.1
8/12
significa que metade do tempo o sinal fica em 0 e a outra metade em 1. O
comando PWM180<ENTER>, faz este ajuste. Se o valor for modificado para 10 o
sinal vai ficar mais tempo em 0 do que em 1, desta forma o comando fica
PWM110<ENTER>. Para desliga-lo usamos o comando PWM1OFF<ENTER>. A
Figura 14 mostra as saídas 1 e 2 de PWM.
Figura 14: Módulo de PWM
Se for necessária a ligação de um motor, por exemplo, o circuito da Figura 15
deve ser colocado na saída do PWM.
Figura 15: Driver do PWM
CUIDADO: a tesão VR não deve ultrapassar 40 V e a corrente máxima que
pode ser fornecida é de 1 A.
ATENÇÃO: ao ligar o circuito com o motor, monitore constantemente a
temperatura do transistor e se for necessário utilize um dissipador de calor
e/ou ventilação forçada.
Rev. 1.1
9/12
2.9 Fonte de alimentação
O circuito básico de uma fonte de alimentação para ligar o PIC com 5V/1A é
mostrado na Figura 16.
Figura 16: Fonte de alimentação
ATENÇÃO: tome muito cuidado com montagem da fonte de alimentação, pois
está conectada a rede elétrica! Não brinque com este circuito! Caso a
montagem não esteja adequada, há riscos de choque-elétrico e queimaduras
causadas por curto-circuito! Antes de ligá-lo solicite orientação do professor
ou pessoal técnico qualificado.
Tabela 1: Lista de materiais da fonte de alimentação.
Componente
Fusível 2A
Transformador 12V / 1.5A
Diodo 1N4004
Capacitor de 3300µF / 50V
Capacitor de 100µF / 50V
Regulador de Tensão 7805
Resistor 270 Ω
LED
Qtd.
1
1
4
1
1
1
1
1
Os componentes da fonte não estão inclusos na lista de materiais descrita no
fim deste documento.
2.10 Outras aplicações
O módulo de leitura e escrita digital (item Figura 17) também pode ser
utilizado para controlar/ler diversos dispositivos (LEDs, relés, displays, ler
sensores, switchs, etc.).
A Figura 17, mostra como ligar um relé a saída digital para controlar uma
Rev. 1.1
10/12
lâmpada. Cuidado especial deve ser tomado para que a tensão de alimentação
Vr (no máximo 15V) seja compatível com a tensão da bobina do relé.
Figura 17: Acionamento de relé
2.11 Características elétricas
Tensão de alimentação Vcc = 5V;
Consumo: menor que 2mA;
Tensão da entrada digital: 0/5V (padrão TTL);
Tensão da entrada analógica: de 0V até 5V;
Impedância máxima do circuito permitida na entrada analógica: 10k ohms;
Corrente de saída máxima do terminal do PIC = 20mA;
2.12 MATERIAIS
Para a montagem da placa são necessários os seguintes componentes
1 Microcontrolador PIC 16F876-4 (módulo principal);
1 Cristal de 4MHz (módulo principal);
1 Resistores de 1 kΩ (módulo principal);
1 Interface Serial MAX-232 (módulo de comunicação serial);
4 Capacitores de 10 µF/25 V (módulo de comunicação serial);
4 Resistores de 330Ω (módulo de IO);
1 Transistor BD 139 (módulo de PWM);
1 Resistor de 330 Ω (módulo de PWM);
1 Diodo 1N4004 (módulo de PWM).
3 PROTOCOLO DE COMUNICAÇÃO DO MODELO M-3
A seguir são listados os comandos disponíveis para o módulo M-3.
Rev. 1.1
11/12
Tabela 2: Descrição dos protocolo
Tipo de comando
Comando
RD
Leitura e escrita digital
WRdd
ECON
Contador de eventos
Descrição
Lê a porta de I/O (resposta em
hexadecimal)
Escreve o dado dd (hexadecimal) na porta
de I/O
Liga o módulo contador de eventos
ECxCLR
Ler o valor do registro do contador de
eventos x
Zera o registro do contador de eventos x
ECOFF
Desliga módulo contador de eventos
PWMxdd
Ajusta PWM x com duty cycle “dd” (em
Hexadecimal)
PWMxOFF
Desativa saída x de PWM
ECxRD
Controle da saída de PWM
Exemplos:
Para ler um dado da porta de IO é necessário utilizar o comando:
RD<ENTER>. O valor lido é retornado na forma de dois caracteres ASCII,
representando um byte em hexadecimal;
Para ligar os bits IO3 e IO2 desligando os bits IO2 e IO0 (ver Figura 12) é
necessário utilizar o comando: WR0A<ENTER>;
Para ler o valor de um registro do contador de eventos 1, por exemplo, use o
comando: ECON<ENTER>. Fará com que o módulo de contagem de eventos
ligue, após é necessário que o contador seja zerado com o comando
EC1CLR<ENTER> com isto podemos iniciar a contagem de eventos. Quando
for necessária uma leitura o comando EC1RD<ENTER> retorna o valor do
contador, por exemplo, 12(em hexadecimal). Para desativar o módulo de
contagem de eventos use o comando ECOFF<ENTER>.
Para ativar uma saída de PWM (ver Figura 14) é necessário utilizar o
comando: PWM180<ENTER>, o 80(em Hexadecimal), representa do duty
cycle do PWM, para ativar a outra saída de PWM utilizar o comando:
PWM280<ENTER>. Se quisermos desativar o PWM, utilizamos o comando
PWM1OFF<ENTER> e PWM2OFF<ENTER>.
Rev. 1.1
12/12