Universidade Federal de Campina Grande - UFCG
Centro de Engenharia Elétrica e Informática - CEEI
Departamento de Sistemas e Computação – DSC
Pós-Graduação em Informática – COPIN
Disciplina: Mineração de Dados
Professor: Marcus Sampaio
GISMEDIA: UM ORGANIZADOR SEMI-AUTOMÁTICO
DE FOTOS GEOREFERENCIADAS
HUGO FEITOSA DE FIGUEIRÊDO
Campina Grande, Novembro de 2007
Sumário
1
Problema ................................................................................................................... 4
2
Solução ...................................................................................................................... 5
2.1
3
Qual é a tarefa de mineração? .......................................................................... 6
Processo de Mineração ............................................................................................. 8
3.1
Preparação de Dados ........................................................................................ 8
3.2
Transformação de Dados .................................................................................. 9
3.3
Garimpagem ...................................................................................................... 9
3.3.1 K-Means........................................................................................................ 9
3.3.2 DBSCAN ...................................................................................................... 15
3.4
Análise e Assimilação ...................................................................................... 16
3.4.1 K-means ...................................................................................................... 16
3.4.2 DBSCAN ...................................................................................................... 21
4
O Organizador de Fotos........................................................................................... 22
5
Conclusões............................................................................................................... 22
6
Referências Bibliográficas ....................................................................................... 22
Apêndice A...................................................................................................................... 22
A.1.
Os Dados.............................................................................................................. 22
A.2.
“Logs” das Execuções .......................................................................................... 23
A.3.
Código fonte do GISMedia .................................................................................. 23
A.4.
Instalador do GISMedia ....................................................................................... 23
A.5.
Conjunto de previsão .......................................................................................... 23
1 Problema
A proliferação de câmeras digitais e o baixo custo de armazenamento de dados fez
aumentar rapidamente a quantidade de arquivos de mídia, sendo que estes necessitam ser
armazenados e posteriormente recuperados. Com isso, os usuários destas máquinas cada vez
mais possuem dificuldades em organizar a grande quantidade de arquivos, muitas vezes não
conseguindo localizar algumas fotos de um determinado evento.
O usuário deseja armazenar, localizar, visualizar e compartilhar suas fotos, podendo-se
utilizar uma biblioteca digital multimídia como provedor destas funcionalidades. Uma forma de
localizar as fotos facilmente é a realização de anotações nos metadados das fotos, podendo
estas anotações ser feitas de diversas formas, como a partir de informações técnicas da câmera
digital no momento da captura, ou até informações sobre a semântica da foto. Alguns
exemplos de informações que podem ser utilizadas nos metadados das fotos são: horário,
localização geográfica, foco da câmera, tempo de exposição, flash, pessoas presentes na foto,
entre outras.
Para realizar anotações em fotos existem três possibilidades, a inserção automática,
semi-automática e manual. Mas os usuários não desejam demandar esforços para realizar
essas anotações, ou seja, eles desejam que o sistema por si só capture informações semânticas
das fotos. Com isso, câmeras digitais mais modernas capturam um conjunto de informações do
contexto da foto automaticamente, como: data, hora e localização geográfica.
Um evento é caracterizado pela situação contextual do usuário no momento da captura
da foto. Algumas informações contextuais podem ser capturadas do usuário podem ser
capturadas pela própria câmera no momento da captura, como o horário e a localização
geográfica e algumas outras informações podem ser obtidas a partir de fontes externas a foto,
como a agenda do usuário no momento da foto.
Alguns estudos mostram que o evento e a posição geográfica são as características
mais marcantes para os usuários recordarem de uma foto. Então há estudos para realizar a
organização de uma coleção de fotos automaticamente baseado nessas informações, como no
PhotoCompas [1].
Com isso, o usuário necessita de um sistema que o auxilie a organizar suas fotos
baseadas nas informações de contexto contidas nos metadados das fotos, principalmente na
informação de localização geográfica e horário da foto.
2 Solução
Neste projeto é proposta a criação de um sistema de organização de fotos com
informações geográficas e temporais, a fim de fornecer ao usuário um mecanismo para uma
melhor gerência de sua coleção de fotos.
O sistema deverá suportar o monitoramento de pastas do sistema de arquivos para
assim organizar automaticamente as fotos nelas contidas. A partir deste monitoramento, o
sistema deverá organizar as fotos levando em consideração tanto a localização como também a
data, separando as fotos em eventos automaticamente.
No âmbito do sistema a ser desenvolvido somente as informações de posição
geográfica e temporais da foto serão utilizadas para caracterizar um evento, não sendo
utilizadas outras informações contextuais de fontes externas aos metadados das fotos.
O sistema de organização será baseado em algoritmos de classificação das fotos, sendo
possível ocorrer classificações erradas de fotos em determinados eventos ou até a criação de
eventos inexistentes. Caso venha a ocorrer alguma destas inconsistências, o sistema deverá
permitir que o usuário manualmente corrija esses problemas de maneira simples e intuitiva.
Ou seja, o sistema também deverá prover ao usuário a possibilidade de criação de eventos de
forma manual. Além da possibilidade destes ajustes manuais que o PhotoCompas não permite,
serão analisadas outras formas de classificação de fotos, que poderão obter resultado melhores
do que a proposta pelo PhotoCompas.
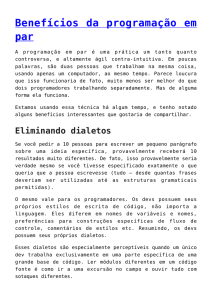
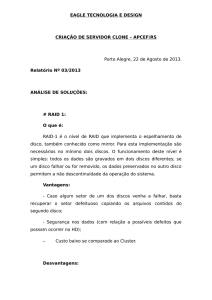
Na Figura 2.1 é apresentada a arquitetura proposta para o sistema, na qual o GISMedia
recebe como entrada uma coleção de fotos e retorna como saída as fotos classificadas, sendo a
classificação baseada nas informações de localização geográfica e temporal das fotos.
Inicialmente as fotos são classificadas espacialmente e posteriormente são segmentadas no
tempo. Para a execução destas tarefas são utilizados dois algoritmos, o primeiro de
agrupamento – para a classificação espacial – e o segundo de segmentação – para a
classificação temporal. Como resultado final, será obtida uma classificação espaço-temporal
das fotos, caracterizando o conceito de evento levantado neste relatório.
Figura 2.1 – Arquitetura do GISMedia.
2.1 Qual é a tarefa de mineração?
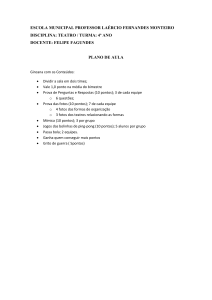
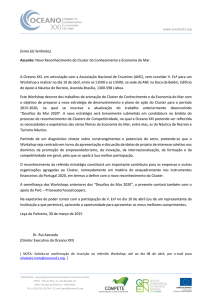
Para realizar a classificação das fotos foram escolhidas duas etapas: a primeira é a de
classificação espacial das fotos georeferenciadas e a segunda é de classificação temporal das
fotos obtidas da primeira classificação. Dessa forma, no final das duas etapas será obtida uma
hierarquia de eventos com as fotos como elementos folhas (ver Figura 2.2).
Figura 2.2 – Hierarquia de eventos.
Para a realização de uma classificação em mineração de dados existem duas opções,
que é a de classificação supervisionada e a de classificação não-supervisionada. A
supervisionada é quando se possui um atributo o qual se deseja que os objetos sejam
classificados em relação aos valores possíveis deste atributo. Já na não-supervisionada são
criados grupos com os objetos mais semelhantes, sem a necessidade da escolha de uma classe
para a classificação. Dessa forma, o método que caracteriza o problema descrito anteriormente
é o de classificação não-supervisionada, pois não existe uma classe a qual cada objeto deve ser
classificado e sim os objetos devem ser agrupados em grupos com maiores semelhanças.
Para a realização da classificação não-supervisionada foram escolhidas duas
abordagens diferentes para uma comparação a ser feita posteriormente. A primeira abordagem
é a de classificação não-supervisionada baseada em particionamento, sendo escolhido o
algoritmo K-means como representante desta abordagem. A segunda abordagem a ser
experimentada é a baseada em densidade, sendo escolhido o algoritmo DBSCAN para esta
tarefa.
Para a realização deste experimento foi escolhida uma coleção de fotos
georeferenciadas e distribuídas no tempo, havendo algumas fotos consideradas pontos fora da
curva, para obter-se maior realismo. A idéia central é que o usuário adicione fotos no sistema e
este se encarregue de organizá-las somente na primeira vez que estas forem inseridas, para
que posteriormente o usuário possua a opção de alterar a hierarquia de fotos geradas pelo
sistema.
Além disso, será necessário que os nomes dos eventos sejam descritos de maneira
lógica para que o usuário consiga detectar rapidamente que evento foi aquele e possa alterar o
nome do evento se desejado.
O K-means identifica classes de objetos com características semelhantes, sendo estas o
mais próximo de um determinado centróide, que é detectado durante a execução do algoritmo
e dependendo dos centróides escolhidos inicialmente, poderão ser obtidos resultados
diferentes, além disso, o K-means exige que seja passado como parâmetro o número de
clusters que serão detectados durante a execução do algoritmo. Com isso, será necessário que
o algoritmo seja executado mais de uma vez para ser realizada uma comparação entre os
resultados obtidos nas duas execuções.
O DBSCAN utiliza a idéia de densidade de objetos para selecionar as áreas com maior
densidade de objetos, podendo-se obter áreas com formatos variados e não somente
circulares como é o caso do K-means. Com isso, são esperados resultados mais interessantes
com o DBSCAN para este problema, mas isto só poderá ser confirmado após a realização dos
experimentos.
Para a execução do algoritmo será utilizada a biblioteca Weka de algoritmos de
mineração de dados, que possui diversos algoritmos de mineração, entre eles alguns de
agrupamento.
Para a classificação temporal será realizada uma segmentação do tempo baseado na
média e desvio padrão dos horários das fotos, sendo utilizada esta abordagem para
simplificação do sistema. Numa próxima etapa serão testadas outras técnicas de classificação
temporal das fotos.
3 Processo de Mineração
3.1 Preparação de Dados
O arquivo utilizado para o processo de mineração de dados foi gerado a partir de fotos
pessoais, sendo carregados os metadados destas e armazenados em um arquivo do tipo CSV
que é facilmente transformado para o formato arff, que é o utilizado pelo Weka para executar
os algoritmos de classificação. O arquivo no formato arff gerado (Apêndice A.1) possui os
dados organizados da seguinte forma:
Pasta
Nome
Latitude
Longitude
Timestamp
O atributo “pasta” é a localização da foto atualmente, sendo este utilizado para uma
comparação posterior com os grupos obtidos da classificação não supervisionada. Este
atributo não é utilizado na tarefa de mineração de dados, somente é utilizado para posterior
comparação.
O atributo “nome” é o nome da foto, sendo este utilizado para identificar unicamente
a foto e para conseguir referenciá-la posteriormente. Este atributo também não é utilizado no
processo de mineração, somente é utilizado posteriormente pelo programa a ser gerado para
referenciar a foto.
Os atributos “latitude” e “longitude“ identificam a posição geográfica das fotos, sendo
estes atributos utilizados no processo de mineração para a classificação não supervisionada
das fotos.
O atributo “timestamp” é a representação temporal da foto, sendo este atributo em
algumas execuções utilizado para analisar os efeitos de agrupamento com e sem o atributo
temporal participando.
3.2 Transformação de Dados
Não houve a necessidade de transformação dos dados, pois todas as fotos adicionadas
para o processo de mineração já estavam de acordo com todas as especificações necessárias
pelo sistema, que são a existência de uma localização geográfica associada à foto e o horário
da captura da imagem.
3.3 Garimpagem
3.3.1 K-Means
Inicialmente, foi realizado o agrupamento utilizando o K-means para os dados de teste
utilizados para este experimento. A escolha do valor de K (número de grupos a ser gerado) é
um problema identificado para este algoritmo, com isso, foi realizado o experimento com
diversos valores de K, sendo observado o comportamento com cada valor selecionado. Como
era de se esperar, quanto menor o valor de K maiores as áreas selecionadas para os grupos,
com isso, os resultados obtidos com os valores de K maiores se saíram melhores, sendo que
em determinado momento fotos muito próximas são colocadas em grupos diferentes devido à
grande quantidade de grupos selecionados. Com isso, para a análise deste algoritmo foi
escolhido o valor vinte para o número de grupos retornados pelo K-means, pois este valor é a
quantidade de pastas existentes nos dados de testes utilizados para este experimento. Dessa
forma, é esperado que os resultados se aproximem mais do esperado, que é cada grupo
possuir apenas uma pasta e as fotos de uma pasta estarem incluídas somente em um grupo.
O K-means foi executado no Weka com três valores de sementes diferentes: três, sete
e dez. Para cada valor de semente escolhido, o k-means retornou um resultado diferente,
como pode ser observado nos valores das somas dos erros ao quadrado. Com a semente igual
a três, o algoritmo retornou o valor 2.625214746496043E-4, já com a semente igual a sete, foi
retornado o valor 9.127879725546387E-4 e para dez o valor 7.386551856803799E-4.
O modelo induzido para o conjunto de dados utilizado neste experimento na execução
do algoritmo K-means no Weka para cada valor de semente foi:
Para semente igual a três:
o
o
o
o
o
o
o
o
Cluster 0
Mean/Mode: -7.1815 -36.0017
Std Devs: 0
0
Cluster 1
Mean/Mode: -7.2802 -39.44
Std Devs: 0
0
Cluster 2
Mean/Mode: -7.2192 -35.9094
Std Devs: 0
0
Cluster 3
Mean/Mode: -7.2222 -35.8822
Std Devs: 0.0027 0.0011
Cluster 4
Mean/Mode: -7.2423 -39.3264
Std Devs: 0.0001 0.0002
Cluster 5
Mean/Mode: -7.2498 -39.4468
Std Devs: 0
0
Cluster 6
Mean/Mode: -7.2016 -39.3196
Std Devs: 0
Cluster 7
0
o
o
o
o
o
o
o
o
o
o
o
Mean/Mode: -9.6584 -35.6982
Std Devs: 0
0
Cluster 8
Mean/Mode: -7.2406 -39.4179
Std Devs: 0
0
Cluster 9
Mean/Mode: -7.181 -36.0016
Std Devs: 0
0
Cluster 10
Mean/Mode: -7.2398 -39.4142
Std Devs: 0.0001 0.0001
Cluster 11
Mean/Mode: -7.0352 -34.855
Std Devs: 0
0
Cluster 12
Mean/Mode: -7.2384 -39.4176
Std Devs: 0
0
Cluster 13
Mean/Mode: -7.2407 -39.4178
Std Devs: 0
0
Cluster 14
Mean/Mode: -7.1119 -34.8235
Std Devs: 0
0
Cluster 15
Mean/Mode: -7.2391 -39.4141
Std Devs: 0
0.0005
Cluster 16
Mean/Mode: -7.0652 -34.8422
Std Devs: 0.0106 0.0008
Cluster 17
Mean/Mode: -7.1117 -34.8228
Std Devs: 0
0
Cluster 18
Mean/Mode: -7.2318 -39.4
Std Devs: 0
0
o
Cluster 19
Mean/Mode: -7.247 -35.8725
Std Devs: 0.0035 0.0036
Para semente igual a sete:
o
o
o
o
o
o
o
o
o
o
o
Cluster 0
Mean/Mode: -7.2423 -39.3264
Std Devs: 0.0001 0.0002
Cluster 1
Mean/Mode: -7.2318 -39.4
Std Devs: 0
0
Cluster 2
Mean/Mode: -7.2498 -39.4468
Std Devs: 0
0
Cluster 3
Mean/Mode: -7.247 -35.8725
Std Devs: 0.0035 0.0036
Cluster 4
Mean/Mode: -7.2282 -35.8819
Std Devs: 0.0001 0.0029
Cluster 5
Mean/Mode: -7.2408 -39.4178
Std Devs: 0
0
Cluster 6
Mean/Mode: -7.181 -36.0016
Std Devs: 0
0
Cluster 7
Mean/Mode: -9.6584 -35.6982
Std Devs: 0
0
Cluster 8
Mean/Mode: -7.1815 -36.0017
Std Devs: 0
0
Cluster 9
Mean/Mode: -7.2192 -35.9094
Std Devs: 0
Cluster 10
0
o
o
o
o
o
o
o
o
o
Mean/Mode: -7.221 -35.8823
Std Devs: 0
0
Cluster 11
Mean/Mode: -7.2802 -39.44
Std Devs: 0
0
Cluster 12
Mean/Mode: -7.0375 -34.8539
Std Devs: 0.0071 0.0035
Cluster 13
Mean/Mode: -7.2016 -39.3196
Std Devs: 0
0
Cluster 14
Mean/Mode: -7.2406 -39.4179
Std Devs: 0
0
Cluster 15
Mean/Mode: -7.2384 -39.4176
Std Devs: 0
0
Cluster 16
Mean/Mode: -7.1097 -34.8246
Std Devs: 0.0075 0.0047
Cluster 17
Mean/Mode: -7.2393 -39.4141
Std Devs: 0.0004 0.0004
Cluster 18
Mean/Mode: -7.2407 -39.4178
Std Devs: 0
0
Cluster 19
Mean/Mode: -7.2407 -39.4178
Std Devs: 0
0
Para semente igual a dez:
o
o
Cluster 0
Mean/Mode: -7.2222 -35.8822
Std Devs: 0.0027 0.0011
Cluster 1
Mean/Mode: -9.6584 -35.6982
o
o
o
o
o
o
o
o
o
o
o
o
Std Devs: 0
0
Cluster 2
Mean/Mode: -7.2802 -39.44
Std Devs: 0
0
Cluster 3
Mean/Mode: -7.2423 -39.3263
Std Devs: 0
0
Cluster 4
Mean/Mode: -7.2407 -39.4178
Std Devs: 0
0
Cluster 5
Mean/Mode: -7.2016 -39.3196
Std Devs: 0
0
Cluster 6
Mean/Mode: -7.2384 -39.4176
Std Devs: 0
0
Cluster 7
Mean/Mode: -7.2192 -35.9094
Std Devs: 0
0
Cluster 8
Mean/Mode: -7.0375 -34.8539
Std Devs: 0.0071 0.0035
Cluster 9
Mean/Mode: -7.1118 -34.8233
Std Devs: 0.0001 0.0003
Cluster 10
Mean/Mode: -7.1815 -36.0017
Std Devs: 0
0
Cluster 11
Mean/Mode: -7.247 -35.8725
Std Devs: 0.0035 0.0036
Cluster 12
Mean/Mode: -7.2498 -39.4468
Std Devs: 0
Cluster 13
0
o
o
o
o
o
o
Mean/Mode: -7.181 -36.0016
Std Devs: 0
0
Cluster 14
Mean/Mode: -7.2393 -39.4141
Std Devs: 0.0004 0.0004
Cluster 15
Mean/Mode: -7.2408 -39.4178
Std Devs: 0
0
Cluster 16
Mean/Mode: -7.2422 -39.3271
Std Devs: 0
0
Cluster 17
Mean/Mode: -7.2406 -39.4179
Std Devs: 0
0
Cluster 18
Mean/Mode: -7.0839 -34.8408
Std Devs: 0
0
Cluster 19
Mean/Mode: -7.2318 -39.4
Std Devs: 0
0
3.3.2 DBSCAN
A segunda abordagem a ser escolhida foi a de agrupamento baseado em densidade,
sendo utilizado o algoritmo DBSCAN para a realização deste experimento. O DBSCAN possui
dois parâmetros de entrada, sendo o primeiro o número mínimo de elementos que um grupo
possui e o segundo o valor de epsilon. Como a detecção de pontos fora da curva não é de
interesse do sistema, pois todas as fotos devem ser armazenadas em alguma pasta de evento,
então o valor do número mínimo de elementos que um grupo pode possuir é um. Em relação
ao segundo parâmetro epsilon, o valor padrão que o Weka fornece não retornou bons
resultados, pois ele não separa os eventos que estão em localizações próximas em relação a
outros, com isso, foi escolhido valores menores para o epsilon para a coleta de resultados do
DBSCAN.
O epsilon corresponde à distância máxima que um elemento vai ter do próximo
elemento do grupo. Dessa forma, foi escolhido o valor para epsilon de 1Km, mas como os
dados estão em graus, então deve ser adicionado como valor de epsilon o valor
correspondente a 1Km em graus. Para ser feita esta transformação foi assumido que a Terra é
redonda e que as fotos estão localizadas no equador. Dessa forma, considerando que a
circunferência da Terra no equador mede 40.075 Km, então cada grau de longitude representa
111,32 Km (40.075/360), então 1Km equivale a 0,00898 (regra de três simples). Dessa forma o
valor de epsilon utilizado para este experimento foi de 0,00898.
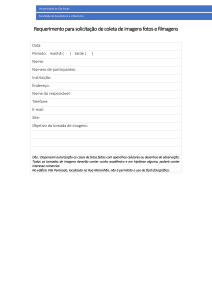
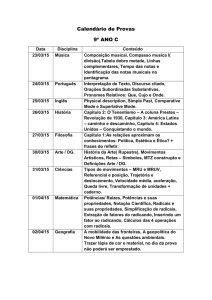
Como pode ser observado na Figura 3.1, foram obtidos 11 grupos com a execução do
DBSCAN, sendo os parâmetros de entrada epsilon e minPoints, com os valores 0,00898 e 1,
respectivamente.
Figura 3.1 – Resultado obtido pelo DBSCAN (Longitude x Latitude).
3.4 Análise e Assimilação
3.4.1 K-means
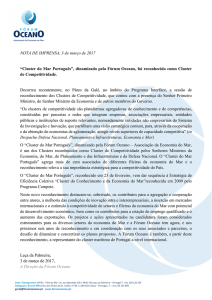
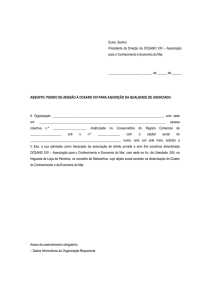
Os resultados obtidos com as execuções do algoritmo k-means, com os dados de teste
utilizados para este experimento, são apresentados graficamente neste tópico. No eixo X dos
gráficos estão os grupos criados e no eixo Y estão as pasta nas quais as fotos estão
armazenadas. Cada retângulo no gráfico representa pastas diferentes cujas fotos foram
classificadas no mesmo grupo, podendo este problema ser resolvido na próxima etapa que é a
de segmentação temporal. Já as elipses representam pastas que tiveram suas fotos divididas
em mais de um grupo, sendo que este problema só poderá ser resolvido de forma manual pelo
usuário posteriormente.
Figura 3.2 – Resultado do k-means sem o timestamp com semente 10 (Cluster X Pasta).
Pastas divididas em mais de um grupo na Figura 3.2 (representadas por elipses), de
cima para baixo:
2007_-_10_-_19_-_SBBD_-_João_Pessoa;
2007_-_07_-_12_-_Casamento_de_Leo_e_Andréia;
2006_-_12_-_24_-_Natal__Crato;
2006_-_09_-_07_-_Feriado_de_7_de_Setembro.
Pastas adicionadas num mesmo grupo na Figura 3.2 (representadas por retângulos), da
esquerda para a direita:
Pastas unidas no grupo 0:
o 2006_-_08_-_11_-_Magia_do_Verde;
o 2006_-_08_-_22_-_Aniversario_de_Juliana;
o Dia_16_-_Missa.
Pastas unidas no grupo 4:
o 2006_-_09_-_07_-_Feriado_de_7_de_Setembro;
o 2007_-_09_-_15_-_Aniversário_Mainha.
Pastas unidas no grupo 7:
o 2006_-_08_-_26_-_Aquecimento_para_Calourada;
o 2007_-_03_-_21_-_Grade_de_Romulo.
Pastas unidas no grupo 9:
o 2007_-_03_-_Passeio_a_João_Pessoa;
o 2007_-_10_-_19_-_SBBD_-_João_Pessoa.
Pastas unidas no grupo 17:
o 2007_-_08_-_Dia_das_mães;
o 2007_-_01_-_20_-_Renovação.
Figura 3.3 - Resultado do k-means sem o timestamp com semente 3 (Cluster X Pasta).
Pastas divididas em mais de um grupo na Figura 3.3 (representadas por elipses), de
cima para baixo:
2007_-_10_-_19_-_SBBD_-_João_Pessoa
2007_-_07_-_Expocrato
2007_-_07_-_12_-_Casamento_de_Leo_e_Andréia
2007_-_03_-_Passeio_a_João_Pessoa
2006_-_12_-_24_-_Natal__Crato
2006_-_09_-_07_-_Feriado_de_7_de_Setembro
Pastas adicionadas num mesmo grupo na Figura 3.3 (representadas por retângulos), da
esquerda para a direita:
Retângulo 1:
o 2007_-_03_-_21_-_Grade_de_Romulo
o 2006_-_08_-_26_-_Aquecimento_para_Calourada
Retângulo 2:
o Dia_16_-_Missa
o 2006_-_08_-_22_-_Aniversario_de_Juliana
o 2006_-_08_-_11_-_Magia_do_Verde
Retângulo 3:
o 2007_-_07_-_12_-_Casamento_de_Leo_e_Andréia
o 2006_-_12_-_24_-_Natal__Crato
Retângulo 4:
o 2007_-_08_-_Dia_das_mães
o 2007_-_01_-_20_-_Renovação
Retângulo 5:
o 2007_-_09_-_15_-_Aniversário_Mainha
o 2006_-_09_-_07_-_Feriado_de_7_de_Setembro
o 2006_-_07_-_22_-_Noivado_-_Melina_e_Marcos
Retângulo 6:
o 2007_-_10_-_19_-_SBBD_-_João_Pessoa
o 2007_-_03_-_Passeio_a_João_Pessoa
Figura 3.4 - Resultado do k-means sem o timestamp com semente 7 (Cluster X Pasta).
Pastas divididas em mais de um grupo na Figura 3.4 (representadas por elipses), de
cima para baixo:
2007_-_07_-_12_-_Casamento_de_Leo_e_Andréia
2007_-_03_-_Passeio_a_João_Pessoa
2006_-_12_-_24_-_Natal__Crato
2006_-_09_-_07_-_Feriado_de_7_de_Setembro
Pastas adicionadas num mesmo grupo na Figura 3.4 (representadas por retângulos), da
esquerda para a direita:
Retângulo 1:
o 2007_-_07_-_12_-_Casamento_de_Leo_e_Andréia
o 2006_-_12_-_24_-_Natal__Crato
Retângulo 2:
o 2006_-_08_-_22_-_Aniversario_de_Juliana
o 2006_-_08_-_11_-_Magia_do_Verde
Retângulo 3:
o 2007_-_03_-_21_-_Grade_de_Romulo
o 2006_-_08_-_26_-_Aquecimento_para_Calourada
Retângulo 4:
o 2007_-_08_-_Dia_das_mães
o 2007_-_01_-_20_-_Renovação
Retângulo 5:
o 2007_-_10_-_19_-_SBBD_-_João_Pessoa
o 2007_-_03_-_Passeio_a_João_Pessoa
3.4.2 DBSCAN
Com o DBSCAN foi obtido um resultado próximo do obtido com o K-means, quando se
é utilizado o número de elipses criadas como medida de acurácia do algoritmo. Mas com o
DBSCAN, não foi necessário passar como parâmetro de entrada o número de grupos a ser
gerado, sendo necessário apenas o valor de epsilon e o número mínimo de elementos em um
grupo. Dessa forma, os parâmetros necessários para a execução do DBCAN são mais fáceis de
estimar do que os valores de parâmetro do K-means.
Com isso, o DBSCAN foi selecionado como o algoritmo a ser utilizado no sistema de
organização automática de fotos (GISMedia). Numa próxima etapa serão avaliados alguns
algoritmos de classificação não supervisionada para segunda tarefa do organizador de fotos,
que é a etapa de segmentação temporal das fotos de cada grupo obtido na tarefa de
agrupamento espacial.
Figura 3.5 - - Resultado do DBSCAN sem o timestamp(Cluster X Pasta).
4 O Organizador de Fotos
5 Conclusões
6 Referências Bibliográficas
[1] Mor Naaman, Yee Jiun Song, Andreas Paepcke, Hector Garcia-Molina. Automatic
Organization for Digital Photographs with Geographic Coordinates. In proceedings, Fourth
ACM/IEEE-CS Joint Conference on Digital Libraries, (JCDL 04), June 2004.
Apêndice A
A.1.
Os Dados
Os dados utilizados para o experimento estão localizados nos arquivos
“/dados/fotos.csv” e “/dados/fotos.arff”. Os arquivos com os dados possuem a referência para
793 fotos, sendo estas distribuídas em vinte eventos distintos, sendo cada evento
caracterizado nos dados pela pasta onde está contida a foto.
A.2.
“Logs” das Execuções
Os logs das execuções estão separados por algoritmos executados, sendo os logs de
execuções do algoritmo k-means estão na pasta “/k-means/” e os das execuções do algoritmo
DBSCAN estão na pasta “/DBSCAN/”.
A.3.
Código fonte do GISMedia
A.4.
Instalador do GISMedia
A.5.
Conjunto de previsão