SISTEMAS OPERACIONAIS
Renato O. Violin
Conteúdo
Introdução ao S.O
Gerenciamento de processos.
Gerenciamento de memória.
Dispositivos de Entrada/Saída.
Sistemas de arquivos.
Definição do problema
Um sistema de computação consiste de diversos
dispositivos.
Todos os dispositivos são complexos de manipular.
Escrever programas que fazem usos desses
dispositivos é uma tarefa difícil.
Como solucionar o problema?
Utilizar uma camada de software chamada
sistema operacional.
Ele gerencia todos esses dispositivos e fornece uma
interface de mais alto nível para acesso ao
hardware.
O que é um Sistema Operacional?
É um software que realiza duas funções:
Estende
a máquina, isto é, esconde do programador a
“verdade” sobre a programação do hardware e
apresenta uma forma mais simples de acessar o
hardware.
Gerencia recursos, isto é, controla todo o hardware e
controla a concorrência entre os diversos processos que
tentam usar esse hardware.
Exemplo de acesso ao hardware
Queremos gravar dados em um disquete sem um
S.O:
O
controlador do disquete tem 16 funções de baixo
nível;
Funções de leitura/escrita têm 13 parâmetros;
Retornam 23 informações de status.
É preciso verificar o status do motor.
Resumindo...
Sistema operacional é um software utilizado para
facilitar a utilização do hardware, fornecendo ao
usuário uma abstração maior, evitando que o
programador acesse as instruções de hardware.
O SO gerencia os recursos de hardware, como por
exemplo: endereçamento de memória, fila de
processos para execução, concorrência entre
processos.
Estrutura de um computador moderno
Estrutura de um computador moderno
Dispositivos físicos: circuitos, unidades de disco
etc.
Microprogramação: constituída por softwares
capaz de interpretar e executar as instruções de
máquina recebidas da camada superior.
Estrutura de um computador moderno
Linguagem de máquina: instruções que movem os
dados pela maquina efetuando operações lógicas
e aritméticas.
Sistema operacional: esconde a complexidade do
hardware e gerencia os recursos compartilhados.
Estrutura de um computador moderno
Utilitários: compiladores, editores texto,
interpretador de comando.
Aplicativos: navegador web, bate-papo etc.
Evolução dos S.O
Os sistemas operacionais evoluíram com o passar
dos anos, acompanhando a arquitetura dos
computadores que executavam.
1ª geração (1940 – 1955)
Foi marcada pelo invento das válvulas.
Computadores eram formados por milhares de
válvulas ocupando salas imensas.
Não havia conceito de sistema operacional.
O acesso era feito diretamente nos painéis do
equipamento, onde o usuário programa seus
cálculos.
Surge o ENIAC, onde a programação era por fios e
pinos.
1ª geração (1940 – 1955) (cont.)
Computador baseado em válvulas
Computador ENIAC
2ª geração (1955 – 1965)
Marcada por três avanços:
Utilização
dos transistores em grande quantidade.
Sistema de processamento em batch.
Surgimento de linguagens de programação de alto
nível (Fortran, Algol e Cobol).
Criação de mainframes.
Programas deixam de ter relação direta com o
hardware.
2ª geração (1955 – 1965)
Processamento em batch:
Programas
eram gravados em cartões perfurados.
Após a leitura, eles eram salvos em uma fita
magnética de entrada.
A fita de entrada era colocada no computador de
grande porte (IBM 7094). Ao final do processamento,
gravava o resultado em uma segunda fita (de saída).
A segunda fita (de saída) era colocada em um
computador (IBM 1401) que lia a fita de saída e
imprimia seu conteúdo.
2ª geração (1955 – 1965) (cont.)
Sistema de processamento batch
3ª geração (1965 – 1980)
Surgimento dos circuitos integrados.
Surgimento das técnicas de:
Multiprogramação:
execução de vários programas por
meio da divisão de memória em partes.
Timesharing: divide o tempo de uso do processador
entre todos os programas.
4ª geração (1980 – 1990)
Surgimentos dos PCs (personal computers).
Surgimento dos sistemas operacionais mais
modernos:
MS-DOS:
linha de comando.
Novel network : sistemas operacional de rede.
Macintosh: baseado em janelas.
5ª geração (1990 – ...)
Surgimento da computação distribuída
Um
programa em execução que pode ser dividido em
subprocessos para serem executados em outros
computadores na rede.
Surgimento do protocolo TCP/IP, padrão Ethernet e
o modelo cliente/servidor.
Surgimento da computação ubíqua.
Conceitos básicos de S.O
Monotarefa
Os primeiros S.O executavam um programa de
cada vez.
Os outros programas deveriam esperar o termino
para poder executar.
Todos os recursos ficavam dedicados a uma única
tarefa.
Multitarefa
Suporta a execução concorrente de vários
programas, dividindo os recursos.
Classificado como:
Monousuário
e Multiusuário.
Pode ser:
Cooperativo:
o processo libera a CPU voluntariamente
(i.e não há interrupções)
Preemptivo: quando o sistema gera uma interrupção e
dá lugar a outro processo na CPU.
Processos
É uma abstração de um programa em execução.
Cada programa tem ao menos um processo
concorrendo os recursos de sistema.
Possui um espaço de endereçamento na memória.
Pode assumir três estados:
Execução
Bloqueado
Pronto
Multiprocessamento
Sistemas com múltiplos processadores.
Compartilham a mesma memória e dispositivos de
entrada.
Aumentam a capacidade computacional.
Interpretador de comandos (Shell)
Interface entre o usuário e o sistema operacional.
É onde o usuário solicita a execução de programas.
Chamadas do sistema
(System Calls)
Interface entre softwares aplicativos e o sistema
operacional.
Exemplo:
Criar
arquivos.
Acessar drive de disquete, CD-Rom etc.
Sistemas Operacionais e suas
Características
Gerenciamento de processos
Processos
Um processo é tudo aquilo que o processador
executa.
E a entidade pela qual a utilização da memória de
um programa, tempo de processador e recursos
de E/S podem ser gerenciados e monitorados
pelo sistema operacional.
O processo pode ser visto como a abstração de um
programa em execução.
Processos
Exemplo
João
vai fazer um bolo. Ele vai utilizar uma receita
para saber quais ingredientes e saber como preparar
tudo.
Quem é o processador?
Quem é o programa?
Quem é o processo?
Processos
Todo software executável em um computador
moderno, até mesmo o sistema operacional, é
organizado em processos.
Os sistemas atuais permitem ao usuário a
chaveamento de vários processos.
Esse chaveamento nos dá a sensação de que os
programas são executados paralelamente.
Troca de processos
Como funciona a troca de processos?
Salvar
o conteúdo atual dos registradores da CPU
referentes a um processo que esta deixando o
processador.
Carregar os registradores com o conteúdo do processo
que esta ganhando a CPU.
Troca de processos
Processos
Principais eventos que levam à criação de processos
inicialização
do sistema
execução de chamada ao sistema de criação de
processos
solicitação do usuário para criar um novo processo
Processos
Condições que levam ao término de processos
saída
normal (voluntária)
saída por erro (voluntária)
erro fatal (involuntário)
cancelamento por um outro processo (involuntário)
Estados do processo
O processador não pode ser ocupado por todos os
processos ao mesmo tempo.
Existe uma competição entre os processos para
entrar em execução.
O sistema operacional deve controlar essa
competição.
Estados do processo
Pronto (aguardando na fila de processos)
Execução (esta no processador)
Bloqueado (aguardando E/S)
Subprocessos
Uma aplicação pode ser dividida em partes que
trabalham concorrentemente.
Consiste em particionar o processo gerado
para controlar a aplicação (processo pai) em
outros subprocessos subordinados a este que são
chamados de processos filhos, ou apenas
subprocessos
Subprocessos
Subprocessos
Conforme aumenta-se a utilização de subprocessos,
há um desperdício de tempo para criar e destruir
estes.
Para resolver este problema, criou-se o conceito de
threads.
Threads
São consideradas processos mais leves.
Enquanto os processos são usados para agrupar
recursos, as threads são as entidades escalonadas
para a execução na CPU.
Um processo possui pelo menos uma thread (linha
de controle).
Threads
Exemplo Threads
Aplicação: Processador de textos
Uso: 3 threads
Interação
com o usuário (teclado)
Formatação de texto
Gravando o documento
Exemplo Threads
Escalonamento
Vimos que o estado de pronto possui uma fila
de processos aguardando a liberação da CPU.
O componente que tenta manter o processador
ocupado o tempo todo, escolhendo que será o
próximo processo a ser executado é o escalonador.
Escalonamento
Categorias de algoritmos
Não-preemptivos
Preemptivos
Algoritmos de escalonamento
First In First Out (FIFO)
Constitui-se
no esquema mais simples de escalonamento
em que os processos são executados do início até o fim,
na ordem de chegada.
Algoritmos de escalonamento
Round Robin – Alternância Circular
Processos
são executados na ordem FIFO, mas com um
intervalo chamado quantum.
Ao final de seu quantum, se o processo ainda estiver
em execução, é interrompido (preempção) e voltará
para o estado de pronto (final da fila) e o próximo
processo da fila será alocado para ocupar a CPU.
Se o processo terminar antes de finalizar o seu
quantum, a CPU será liberada.
Algoritmos de escalonamento
Round Robin – Alternância Circular
Exemplo:
quantum de 20 ms
Processo
Tempo de Uso da CPU em
ms (milissegundos)
P1
P2
P3
P4
50
14
65
21
Algoritmos de escalonamento
Shortest Job First – Processo mais curto primeiro
Processos
menores são executados primeiro.
Processos curtos são favorecidos.
Processo maiores são prejudicados.
Pouco utilizado na prática.
Algoritmos de escalonamento
Shortest Job First – Processo mais curto primeiro
Exemplo:
Processo
Tempo de Uso da CPU em ms
(milissegundos)
Chegada
P1
7
0
P2
4
2
P3
1
4
P4
4
5
Concorrência
Os processo concorrem pelos recursos do sistema.
Exemplo: fila de impressão
Deadlock
Acontece quando dois ou mais processos estão
disputando recursos e nenhum deles consegue seguir
a execução porque ambos estão bloqueando uns
aos outros.
Exemplo:
Dois
processos querem gravar um CD.
Processo P1 aloca o Gravador.
Processo P2 aloca o HD.
P1 espera P2 terminar de usar o HD.
P2 espera P1 terminar de usar o gravador.
Exclusão Mútua
Evitar que mais de um processo utilize um recurso
compartilhado.
Condições para exclusão mútua:
1.
2.
3.
4.
Dois processos não podem estar dentro de suas regiões críticas
ao mesmo tempo, compartilhando o mesmo recurso.
A exclusão mútua dos processos deve ser independente da
velocidade dos processos ou o número de CPUs.
Um processo executado fora da região crítica não pode
bloquear outros processos.
Nenhum processo esperará para sempre para entrar em sua
região crítica.
Exclusão mútua com espera ocupada
Se um processo está acessando uma região crítica, ou
seja, esta em execução, todos os outros processos que
precisarem acessar esta região deverão entrar em
estado de espera ocupada.
Esta espera se refere apenas à região crítica.
Desabilitar interrupções.
Variável Lock.
Variável Turn.
Peterson.
Instrução TSL.
Desabilitar interrupções
Desabilitar todas as interrupções, inclusive as do
sistema operacional, quando uma região crítica
está sendo acessada, garantindo que o processo
em execução termine de executar a região crítica
sem a intervenção de outros processos.
Variável Lock
Esta solução utiliza um algoritmo em que cada
recurso compartilhado possui uma variável global
chamada lock, com valor inicial igual a 0.
O algoritmo controla o acesso à região crítica por
meio da variável lock. Ao consultar, se o seu valor
for 0, o processo executará a região crítica; e se
for 1, o processo aguardará até que a variável
lock se torne 0.
Variável Turn
Se a variável turn for igual a i, o processo de
número i executará a região crítica até terminar.
Ao sair, o processo altera o valor de turn para i+1
para que o próximo processo, ao executar, tenha
acesso à região crítica.
Solução de Peterson
Combina as variáveis lock e turn solucionando os
problemas individuais de cada uma delas.
Instrução TSL
É uma instrução utilizada em muitos processadores
que permite a implementação de variáveis lock.
A vantagem é que nem mesmo uma interrupção de
hardware pode interromper a execução.
Gerenciamento de memória
Gerenciamento de memória
Na memória principal ficam todos os programas e
os dados que serão executados pelo processador.
Possui menor capacidade e custo maior.
S.O buscam minimizar a ocupação da memória e
otimizar sua utilização.
Componente é o gerenciador de memória.
Gerenciamento de memória
Tarefas do gerenciador de memória:
Monitorar
quais partes da memória estão utilizadas e
quais estão disponíveis.
Realizar alocação e liberação da memória para os
processos.
Gerenciamento do swapping (troca) entre a memória
principal e a secundária.
Gerenciamento de memória
Esquemas de gerenciamento de memória:
Mantém
os processo fixos na memória principal.
monoprogramação
Movem
os processos entre a memória principal e
secundária (swapping e paginação).
multiprogramação
Gerenciamento sem paginação
Foram utilizadas nos sistemas mais antigos.
A memória era compartilhada entre o S.O e os
programas.
Chamada de monousuário ou monoprogramação.
Somente um processo pode ser executado a cada
instante.
Gerenciamento sem paginação
Três maneiras simples de organizar memória com um sistema operacional e com processos.
Gerenciamento de memória com
partições fixas
Em direção à multiprogramação foram criadas
partições fixas com tamanhos diferentes na memória
principal.
A idéia é utilizar sempre o menor espaço possível.
Com tamanho fixo das partições, todo espaço naquela
partição que não era utilizado pelo processo era
perdido.
Funciona bem quando as tarefas são do mesmo
tamanho ou quando os tamanhos são conhecidos
previamente.
Partições fixas
Partições fixas de memória com filas separadas para cada partição
Gerenciamento de memória com
partições fixas
Surge um problema quando partições grandes está
com a fila vazia e uma fila para partição pequena
está com a fila cheia.
Solução: utilizar uma única fila.
O
processo mais próximo do início da fila que se ajusta
na partição vazia poderia ser carregado.
Gerenciamento de memória com
partições fixas – fila única
Partições fixas de memória com fila única.
Troca de processos
Nem sempre existe memória principal para todos
os processos.
Alguns processos devem ser mantidos no disco
(memória secundária).
Técnicas:
Swapping.
Memória
virtual.
Swapping
Consiste em trazer o processo inteiro do disco para
a memória, executá-lo e devolve-lo para o disco.
Os processos que estão sobrando ficam na memória
secundária e trazidos de lá dinamicamente.
Swapping
Vantagem em relação às partições fixas:
Número,
posição e tamanho das partições variam
dinamicamente.
Com o tempo são criadas lacunas na memória
principal.
Técnica de compactação de memória para mover
os dados para baixo.
Swapping
Swapping
É provável que a área de dados (heap e pilha) do
processo cresça durante a execução.
Se houver espaço adjacente ele será alocado para
o processo.
Se não houver espaço adjacente o processo inteiro
deverá ser movido para outra área da memória
principal.
Pode-se alocar uma memória extra sempre que
fizer a troca ou mover um processo.
Swapping
Memória virtual
Divide-se o programa em módulos chamados
overlays (sobreposição).
No princípio, o programador deveria fazer a
divisão do programa em módulos.
Mais tarde, essa tarefa passou para o S.O.
Assim, um programa grande que excedesse a
memória física do computador poderia ser
executado.
Memória virtual
Um programa de 32 MB pode ser executado em
uma máquina com apenas 8 MB, por meio de uma
escolha cuidadosa feita pelo sistema operacional
em que 8 MB será mantido ativo na memória em
cada instante, dinamicamente, dando a ilusão de
que o programa inteiro está na memória.
Essa troca de módulos é a técnica de paginação.
Paginação
No sistemas com memória virtual, o endereço virtual
e físico não são os mesmos.
Quem realiza o mapeamento dos endereços
virtuais para o endereço físico é a unidade MMU
(memory management unity).
Paginação
Paginação
Como exemplo, nosso computador possui 32 KB de
memória física.
Queremos executar um programa de 64 KB.
O programa não pode ser carregado totalmente
na memória.
Assim, partes do programa serão carregadas
quando necessário.
Paginação
Paginação
Neste caso, as páginas marcadas com um X não
estão mapeadas no momento.
Se o programa tentar utilizar, ocorrerá o pagefault.
Ele deverá escolher uma página pouco utilizada,
colocá-la em disco e carregar a pagina desejada.
Algoritmos de substituição de páginas
Algoritmo FIFO
Baixo
custo.
Mantém uma lista de todas as páginas, com a página
mais velha no inicio e a mais nova no fim.
Quando recebe um page-fault a primeira página a
sair é a mais velha (início da fila).
Pouco utilizado porque pode ser removida páginas
muito utilizadas
Algoritmos de substituição de páginas
Algoritmo FIFO
Algoritmos de substituição de páginas
Relógio
Utiliza
um bit (R) - referenciada
Assim o SO sabe qual página é mais ou menos
utilizada.
As páginas são mantidas em lista circular.
Um ponteiro aponta para a mais antiga. Se acontecer
um page-fault verifica o bit (R). Se for 0 é porque não
esta referenciada e substituirá. Se for 1, seta R = 0 e
avança o ponteiro até encontrar uma pagina com R =
0.
Algoritmos de substituição de páginas
Relógio
Algoritmos de substituição de páginas
Algoritmo LRU (least recently used)
Baseia-se
na idéia de que uma página utilizada
recentemente pode ser utilizada novamente.
Portanto, páginas que não foram utilizadas
recentemente provavelmente permanecerão nãoutilizadas durante mais tempo.
Assim, ele remove as páginas menos utilizadas
recentemente.
Algoritmos de substituição de páginas
Algoritmo LRU (least recently used)
Sistemas de entrada/saída
Sistemas de entrada/saída
Os dispositivos de E/S são a comunicação do
sistema operacional com o mundo externo.
Os dispositivos de entrada e saída são controlados
pelos sistemas operacionais.
O S.O emite comandos para os dispositivos, realiza
tratamento de erros e oferecer uma interface
simples, que abranja todos os dispositivos do
sistema.
Esses dispositivos apresentam uma grande variação
de velocidades.
Sistemas de entrada/saída
Sistemas de entrada/saída
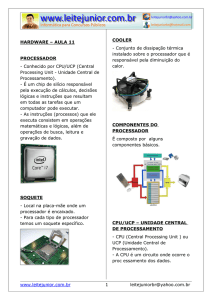
Para que o sistema operacional controle um
dispositivo de E/S é necessário que interaja com um
componente eletrônico chamado controlador de
dispositivo e um dispositivo mecânico.
Controlador de dispositivo
Placa
de circuito eletrônico.
Dispositivo mecânico
É
o dispositivo propriamente dito
Sistemas de entrada/saída
Exemplo: Mouse
O componente eletrônico seria o circuito que
interpreta as coordenadas X e Y e envia para o
SO posicionar o cursor na tela.
O componente mecânico seria a esfera ou o
dispositivo ótico e os botões.
Sistemas de entrada/saída
Drivers de dispositivo são os programas que
possibilitam a comunicação entre o S.O e o
dispositivo.
São desenvolvidos pelo fabricante do dispositivo.
Cada S.O precisa do seus próprios drivers.
Além de controlar o dispositivo, o driver também
trata os erros.
Sistemas de entrada/saída
Buffers:
Região
de memória temporária utilizada para escrita
e leitura de dados.
São utilizados quando existe uma diferença entre a
taxa em que os dados são recebidos e a taxa em que
eles podem ser processados.
Também são utilizados como armazenamento
temporário (ex. buffer do HD).
Sistemas de entrada/saída
Maneiras que as operações de E/S são feitas:
E/S
programada.
E/S orientada por interrupção.
E/S usando DMA.
Sistemas de entrada/saída
E/S programada:
Consiste
em ter o processador dedicando-se
totalmente ao periférico enquanto durar a
comunicação.
O processador deve obter os dados do dispositivo E/S
e transferi-los para memória.
Nesse tempo o processador nunca é interrompido.
Desvantagem: processador fica alocado enquanto não
terminar a transferência.
Sistemas de entrada/saída
E/S orientada por interrupção:
Quando
um dispositivo de E/S finaliza o seu trabalho
gera uma interrupção que segue por meio do
barramento, até o processador para ser atendido.
O sinal de interrupção faz com que o processador
pare o que esta processando para atender essa
interrupção.
Melhor do que a E/S programada, pois elimina ciclos
de espera desnecessários, mas ainda o processador é
usado em qualquer operação E/S.
Sistemas de entrada/saída
Como acontece a interrupção
Sistemas de entrada/saída
E/S por DMA (Direct Memory Access)
O
controlador de DMA faz todo o trabalho de
transferência de dados de um dispositivo de E/S no
lugar do processador principal.
A vantagem do DMA é diminuir as interrupções que
chegam até o processador principal para que o
sistema tenha um desempenho global melhor
Sistemas de entrada/saída
Sistemas de entrada/saída
A transferência dos dados ocorrem de duas
maneiras:
Blocos
de informação:
Dados
são armazenados em blocos de tamanho fixo. Ex.:
CD-Rom, HD.
Caracteres:
Os
caracteres são enviados e recebidos sem considerar
qualquer estrutura. Ex.: Mouse, teclado, placa rede,
impressora.
Sistemas de entrada/saída
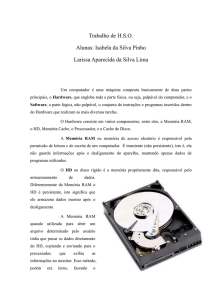
Disco rígido (HD):
São
considerados os repositórios de dados mais
populares.
Constituídos por um ou vários discos sobrepostos
unidos por um eixo central girando a uma
velocidade constante. São organizados em cilindros,
os quais contem trilhas. Essas trilhas sofrem outra
divisão em setores com 512 bytes.
Sistemas de entrada/saída
Sistemas de entrada/saída
Para calcular a capacidade do disco:
Capacidade Real = cabeças x cilindros x setores x
512
Numero de cilindros = número de trilhas.
Sistemas de entrada/saída
Disco rígido (HD):
O
tempo para ler/gravar é dado por:
Tempo
de posicionamento (tempo necessário para
mover o braço para o cilindro correto).
Atraso de rotação (tempo necessário para encontrar o
setor correto sob o cabeçote de leitura/gravação).
Tempo de transferência real do dado.
Sistemas de entrada/saída
RAID (redundant array of inexpensive* disks):
Conjunto
de discos redundantes e independentes que
otimizam as operações de E/S e a segurança dos
dados.
A estratégia é substituir um disco grande por vários
discos menores.
Trabalha em cinco níveis*.
Sistemas de entrada/saída
RAID 0 – espalhamento de dados
RAID 1 – espelhamento de dados
Sistemas de entrada/saída
RAID 2 - Igual ao RAID 0, porém com esquema de
detecção de erros.
RAID 3 – Versão simplificada do RAID 2, pois usa
um disco rígido extra para armazenamento de
informações de paridade
Sistemas de entrada/saída
RAID 4 – similar ao RAID 3, só que mais rápido por
usar blocos de dados.
RAID 5 - Similar ao RAID 3 e 4, só que grava as
informações de paridade dentro dos próprios
discos.
RAID
Para saber mais sobre RAID acesse:
http://www.clubedohardware.com.br/artigos/651
http://pt.wikipedia.org/wiki/RAID
Sistemas de entrada/saída
Disco ótico:
A informação gravada em um CD-Rom é lida por um feixe
de laser de baixa intensidade.
O feixe de laser atravessa a cobertura de verniz, enquanto
o motor gira o disco de resina plástica, e ao encontrar um
sulco, a intensidade da luz refletiva muda. Essa intensidade
é sentida por um foto-sensor que em seguida converte em
um sinal digital.
Os CD-ROMs não têm cilindros concêntricos, como os discos
magnéticos. Contem uma única espiral.
Sistemas de entrada/saída
Sistemas de entrada/saída
Gravação do CD-Rom
É
utilizado um laser de alta potência para criar pontos
negros na camada refletiva.
Onde o laser não atinge fica transparente.
Essa diferença simula a depressão e a superfície.
Sistemas de entrada/saída
Relógios:
Os
relógios são considerados essenciais, pois
mantêm a hora atualizada e evitam que um
processo monopolize a CPU.
Gera interrupções.
Funções:
Manter
a hora e o dia
Evitar que processos ocupem a CPU por muito tempo.
Contabilizar o uso da CPU, isto é, saber quanto tempo um
processo esteve em execução.
Sistemas de entrada/saída
Gerenciamento de energia:
É
função do S.O fazer o gerenciamento de energia.
Duas abordagens:
S.O
desliga os componentes
S.O diminui a energia, causando perda de desempenho.
Sistemas de entrada/saída
Consumo de energia de várias partes de um laptop
Sistemas de entrada/saída
Monitor:
O
S.O coloca o monitor em um estado de “dormindo”.
Qualquer toque no teclado ou movimento no mouse o
S.O “acorda” o monitor.
Sistemas de entrada/saída
Disco rígido (HD):
Consome
muita energia para manter o disco girando
mesmo quando não há atividade.
O S.O pode cortar totalmente a energia e qualquer
atividade faz o disco voltar a funcionar.
Pode causar atrasos consideráveis.
Sistemas de entrada/saída
CPU:
Sempre
que a CPU se torna ociosa o S.O reduz a
voltagem dela.
Memória:
A
memória pode ser desligada.
Antes, todo o conteúdo é copiado para o disco rígido.
Sistemas de arquivos
Sistemas de arquivos
Todos os programas precisam armazenar e
recuperar dados.
Os processos não podem armazenar grande
quantidade de dados no seu espaço de
endereçamento.
Quando o processo chega ao final os dados no seu
espaço se perdem.
Precisamos que vários processos acessem os mesmos
dados.
Sistemas de arquivos
A solução é utilizar um meio de armazenamento
chamado arquivos.
Para criar arquivos é preciso informar um nome:
No
MS-DOS os nomes eram limitados a 8 caracteres.
Nos S.O atuais podem ter até 255 caracteres.
Sistemas de arquivos
Estrutura dos arquivos:
Sequência
de bytes
O
S.O não se importa com o conteúdo do arquivo.
O significado deve ser dado pelo programa do usuário.
Sequência
Arquivos
de registros
são uma sequência de registros.
Esses registros possuem tamanho fixo.
Operação de leitura/escrita sobrepõe ou anexa um
registro.
Sistemas de arquivos
Árvore
Cada
de registros:
registro contém um campo chave.
A árvore é ordenada pelo campo chave.
Facilita a busca por um registro dentro do arquivo.
Sistemas de arquivos
Sistemas de arquivos
Além do arquivo guardar o nome e os dados, ele
pode associar informações como:
Data
e hora de criação.
Tamanho do arquivo.
Esses itens são chamados atributos.
Sistemas de arquivos
Sistemas de arquivos
Diretórios:
Pode
conter centenas de arquivos ou nenhum arquivo.
Pode conter outros diretórios.
A diferença do arquivo é que ele mantém uma tabela
de ponteiros para outros arquivos/diretórios.
Sistemas de arquivos
Sistemas de arquivos
Nomes de caminhos:
Caminho
absoluto:
Formado
Caminho
pelo caminho entre o diretório raiz e o arquivo.
relativo:
Formado
pelo caminho entre o diretório atual e o arquivo.
Sistemas de arquivos
Sistema de arquivos:
Um
disco rígido pode ser dividido em uma ou mais
partições.
Todo disco possui um setor 0 que chamamos de MBR
(master boot record), que é utilizado para iniciar o
computador.
O BIOS lê e executa o setor 0 do disco em busca de
uma partição ativa.
Sistemas de arquivos
Esquema de partição de disco:
Superbloco:
fornece informações tais como:
identificação do sistema de arquivos, número de blocos
do sistema de arquivos etc.
Blocos livres: informa a quantidade de blocos livres no
sistema.
I-nodes: uma estrutura de dados com informações
sobre os arquivos.
Diretório raiz: contem o topo da árvore de diretórios.
Arquivos e pastas: conteúdo propriamente dito.
Sistemas de arquivos
Estrutura geral de uma partição do disco.
Sistemas de arquivos
Questão:
Como
é feito o controle de quais blocos do disco estão
relacionados com quais arquivos?
Em outras palavras, como os arquivos são gravados e
distribuídos entre os blocos?
Métodos de gravação:
Alocação
contínua.
Alocação por lista encadeada.
I-nodes
Sistemas de arquivos
Alocação contínua:
Consiste
em armazenar cada arquivo em blocos
contíguos.
Implementação simples.
Para
localizar um arquivo basta saber o endereço do
primeiro bloco e o número de blocos do arquivo.
Bom
desempenho para leitura.
Desvantagem que o disco fica fragmentado.
Sistemas de arquivos
Sistemas de arquivos
Alocação por lista encadeada:
Os
arquivos são armazenados em blocos lincados.
Os primeiros bits de cada bloco é o ponteiro para o
próximo bloco.
Não acontece fragmentação.
Acesso aleatório lento, pois os blocos tem que ser lidos
um de cada vez até chegar no arquivo desejado.
Tabela de alocação
Sistemas de arquivos
I-node
Estrutura
de dados (pequena tabela) que mantém
informações e os endereços de disco dos blocos do
arquivo.
A
principal diferença da tabela de alocação é que
apenas o i-node fica na memória apenas quando o
arquivo está em uso.
Sistemas de arquivos
Esquema de um I-node
Sistemas de arquivos
Confiabilidade dos sistemas de arquivos:
O
sistema de arquivos pode ser danificados por vários
motivos:
Queda
de energia.
HD defeituoso.
Erro de software.
Deve-se
Cópia
possuir copias de segurança.
física.
Cópia lógica.
Sistemas de arquivos
Exemplos de sistemas de arquivos:
CD-Rom:
ISO
9660: produzido com limitações para atender alguns
sistemas operacionais (MS-DOS)
Estendido para Joliet :
Nome de arquivos longos.
Conjuntos de caracteres Unicode.
Diretório com profundidade maior que 8 níveis.
Sistemas de arquivos
Exemplos de sistemas de arquivos:
Windows:
NTFS: até 16 TB.
Sistemas de arquivos
Exemplos de sistemas de arquivos:
Linux:
ext-2:
16 TB
ext-3: 16 TB com journaling.
ReiserFS: 16 TB com journaling.
JFS: 4 PT (petabytes) com journaling.
XFS: 16 EX (exabytes) com journaling.
Journaling:
é um log que o SO faz antes de escrever
qualquer dado no disco.