IT 190 Princípios em Agricultura de Precisão
Mapeamento de produtividade
com colhedoras
Carlos A. A. Varella
Departamento de Engenharia
Universidade Federal Rural do Rio de Janeiro
Sistema de aquisição de dados
Sensor de fluxo
de massa
Sensor de
umidade
Sensor de
posição
DGPS
Computador
da máquina
Sistema de aquisição de dados – outros sensores
Colhedora de forragem John Deere
modelo 7300
Detector de metais
Indicador na cabine localiza o objeto metal
Afiação automática de facas de corte
Protocolo de comunicação
O CAN Bus (Barramento Controller Area
Network) foi desenvolvido pela empresa alemã
Robert BOSCH e disponibilizado em meados dos
anos 80. Disponível em:
http://www.pcs.usp.br/~laa/Grupos/EEM/CAN_Bus_Parte_2.html.
Acesso em: 22 mai. 2007.
Sistema Fieldstar usado pela AGCO-MF
GPS em tempo real - DGPS
Satélite do Sistema
de Posição Global
Satélite para
correção do erro em
tempo real
Sensores de produtividade
Sensores de fluxo de massa
Por impacto
Por radiação gama
Sensores de volume
Sensor fotoelétrico
Rotor de pás
Sensor
Sensores por impacto - massa
Montado no topo do elevador transportador de grãos
Funciona pelo impacto dos grãos em uma chapa
O deslocamento da chapa gera um sinal eletrônico
proporcional a massa de grãos.
Chapa de impacto
Sensores por radiação gama - massa
Funciona por emissão e detecção de radiação gama
A quantidade é medida pela variação da amplitude
da radiação
1. Elevador de grãos
2. Receptor de sinal
3. Emissor de sinal
Radiação gama
Sensores fotoelétrico - volume
Montado no elevador de grãos
A quantidade transportada está correlacionada com o
tempo de interrupção do feixe de luz (IV)
Considera o volume da pá para estimar o volume de
grãos
Pá do elevador
Emissor
Receptor
Rotor de pás - volume
Montado no elevador de grãos
O sensor ótico envia sinal para o rotor girar quando
estiver cheio
Peso = Volume x Densidade
O volume da pá é conhecido
Sensor ótico
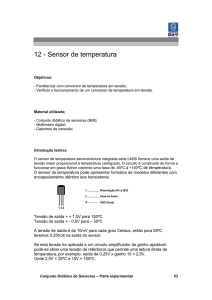
Sensor de umidade
Variação da umidade ao longo do tempo
Corrigir para 14% base úmida
Sensor de posição em tempo real - DGPS
• Antena DGPS recebe o sinal
• Receptor decodifica o sinal
Antena
Receptor
Cartão grava e exporta a informação
Geração de dados pontuais de produtividade
Componentes de exatidão
Inclinação transversal: topografia
Tempo de atraso de leitura: hardware
Baixa produtividade na bordadura: operacional
Computador da máquina
Computador da máquina
Interface com usuário
Entrada de dados:
• Largura da máquina
• Parâmetros de calibração dos sensores
Processar e armazenar informações
• Algoritmos implantados em hardware
• Cartão de dados
Mapa de produtividade
CEREAIS-CAFÉ-LARANJA-UVA PARA VINHOS
Análise do mapa
Resultados