Universidade Federal do Rio Grande do Norte
Centro de Tecnologia
Departamento de Engenharia Elétrica
Instrumentação Eletrônica
Professor: Luciano Fontes
Aluno: Hudson Pinheiro de Andrade
Sensor de velocidade
Instrumentação Eletrônica – Sensor de velocidade
1
Formas de medição
- Tacogerador:
Transforma diretamente a grandeza
mecânica em uma grandeza elétrica.
- Encoder:
Consegue medir com precisão o
deslocamento e associado a algum outro
dispositivo capaz de medir o tempo
calcula-se a velocidade.
Instrumentação Eletrônica – Sensor de velocidade
2
Tacogerador
O tacogerador nada mais é do que um gerador DC de ímã
permanente acoplado mecanicamente no eixo em que se deseja
medir a velocidade. Este gerador DC gera uma tensão de saída que é
proporcional a velocidade do seu eixo.
Instrumentação Eletrônica – Sensor de velocidade
3
Encoder
Encoder é um dispositivo eletromecânico que conta ou reproduz
pulsos elétricos a partir do movimento rotacional do eixo, ele gera um
pulso para um determinado incremento de rotação (encoder rotativo),
ou um pulso para uma determinada distância linear percorrida (encoder
linear). Uma vez que medindo a distância total percorrida (através da
contagem dos pulsos na saída do encoder) e o tempo necessário para
esta distância ser percorrida, consegue-se calcular a velocidade.
Os encoders ópticos operam por meio de um disco com
ranhuras ou aberturas transparentes, que se move entre uma fonte de
luz (seja visível ou infravermelha) e um detector. Este disco é acoplado
mecanicamente em um eixo. À medida que o eixo começa a girar o
disco passa entre a fonte e o detector, fazendo com que o feixe de luz
seja interrompido quando encontra uma parte fechada e seja
novamente liberado quando passar por uma abertura transparente,
gerando assim uma onda pulsante. A fonte de luz pode ser um Diodo
Emissor de Luz (LED), um diodo infravermelho ou uma pequena
lâmpada incandescente.
Instrumentação Eletrônica – Sensor de velocidade
4
Na prática, dois fotodiodos são usados, organizados para
produzir sinais com 180° de diferença de fase para cada canal, as duas
saídas dos diodos são subtraídas para cancelar o offset DC
Esta saída quase senoidal pode ser usada direta sem
processamento, porém mais freqüentemente esta saída passa por um
circuito eletrônico onde é amplificada ou usada para produzir uma onda
quadrada
Instrumentação Eletrônica – Sensor de velocidade
5
Instrumentação Eletrônica – Sensor de Velocidade
6
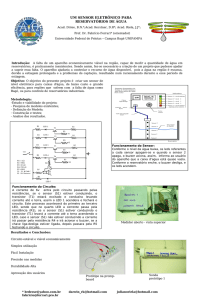
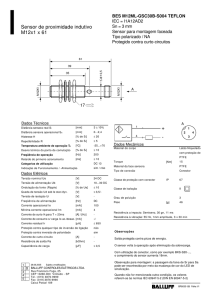
Sensor Óptico Eletrônico de Velocidade
O sensor de velocidade desenvolvido é composto por um sensor
óptico do tipo reflexivo e um circuito eletrônico digital. Constitui o sensor
reflexivo, um emissor infravermelho formado por um foto-diodo e um
receptor infravermelho constituído por um foto-transistor. O emissor e o
receptor são encapsulados em um mesmo conjunto. O circuito eletrônico
tem como objetivo isolar galvanicamente o sensor óptico do circuito do
controlador, evitando eventuais danos. Outra função deste circuito é
converter o nível de tensão do sensor (normalmente 5 v) em um nível
industrial padrão (12 v ou 24 v).
Instrumentação Eletrônica – Sensor de velocidade
7
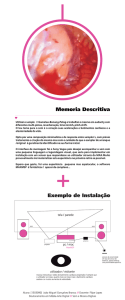
Princípios de Funcionamento
Na lógica DARK ON, a saída fornece um sinal lógico “1”
(Vcc) quando nenhum feixe de infravermelho chega ao receptor e
gera um sinal lógico “0” (Gnd) quando algum anteparo reflete o
feixe fazendo com que este chegue ate o receptor. Já na lógica
LIGHT ON, o processo se inverte. Visando uma maior flexibilidade
de funcionamento projetou-se o circuito para atender os dois tipos
de lógica de saída.
O circuito deve ser ligado em 5 v para alimentar o sensor
óptico e também deve ser ligado na mesma fonte do controlador
(24 v no caso de PLC). O circuito tem como entrada os sinais de
saída dos sensores ópticos e gera como saída os sinais que serão
ligados no cartão de entrada digital do controlador. Este circuito
realiza uma isolação galvânica entre o sensor e o controlador. Esta
isolação é realizada através do foto acoplador TIL 111. Quando a
parte clara do eixo do motor passar pelo sensor, a saída do
mesmo (5 V no sensor LIGHT ON e 0 V no sensor DARK ON) irá
gerar uma corrente de aproximadamente 16 mA que circulará
pelo foto diodo do TIL 111
Instrumentação Eletrônica – Sensor de velocidade
8
Instrumentação Eletrônica – Sensor de velocidade
9
A corrente (16mA) gera um feixe de infravermelho suficiente
para saturar o foto transistor, e conseqüentemente uma tensão próxima
da tensão do controlador (24 v no caso do PLC) aparece no pino de
saída. Quando a parte escura do eixo do motor passar pelo sensor, a
saída do mesmo (0 V no sensor LIGHT ON e 5 V no sensor DARK ON)
irá interromper a corrente que circulava pelo foto diodo, cessando assim
o feixe de infravermelho e conseqüentemente levando o foto transistor
à região de corte. Uma vez cortado, uma tensão de 0 v irá aparecer na
saída devido ao pull down realizado com o resistor de 2K2. Colocou-se
o resistor de 1M na base do foto transistor (pino 6 do TIL 111) apenas
por solicitação do fabricante. À medida que o eixo do motor vai girando
o foto transistor vai cortando e saturando seqüencialmente gerando
assim uma onda quadrada na saída do circuito.
Instrumentação Eletrônica – Sensor de velocidade
10
Dado o período do sinal T em segundos, a rotação
(velocidade) do motor será:
f=1/T
N = f x 60
Onde:
f = freqüência em Hz
N = Velocidade em rpm (rotações por minuto)
O processo descrito anteriormente para o cálculo da
velocidade pode ser implementado em controladores através do
uso de contadores e temporizadores.
Instrumentação Eletrônica – Sensor de velocidade
11
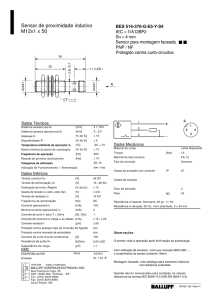
Placa de circuito impresso
Instrumentação Eletrônica – Sensor de velocidade
12