Ensino Superior
Introdução aos Sistemas de Controle
2.2 – Exemplos de Sistemas de Controle
Amintas Paiva Afonso
Sumário
2.2.3 Classificação de Sistemas
2.2.4 O Uso de Ferramentas Computacionais
2.2.5 Abordagens Utilizadas nas Aulas
2.2.3 Classificação de Sistemas
Antes de apresentar os tipos de sistemas, é importante
definir alguns elementos importantes nesta classificação:
• Variáveis de estado são aquelas que definem a
condição operativa de um sistema dinâmico. Essas
variáveis dependem do sistema dinâmico analisado,
podendo ser a corrente em um circuito elétrico, a
velocidade ou inclinação de um corpo, etc.
• Variáveis de perturbação são aquelas que tendem a
mudar o ponto operativo de um sistema, podendo ser
interpretadas como um distúrbio.
2.2.3 Classificação de Sistemas
• Distúrbios são sinais que tendem a afetar de maneira
adiversa o valor da variável de saída de um sistema. Se um
distúrbio for gerado dentro de um sistema, ele será chamado
de distúrbio interno, enquanto o distúrgio externo é aquele
gerado fora do sistema e que se comporta como um sinal de
entrada no sistema.
• Controle com realimentação ou de malha fechada refere-se
a uma operação que, na presença de distúrbios, tende a
diminuir a diferença entre a saída de um sistema e alguma
entrada de referência e atua com base nessa diferença. Aqui
serão considerados apenas distúrbios não previsíveis, uma vez
que os previsíveis podem ser compensados no sistema.
2.2.3 Classificação de Sistemas
• Variáveis de controle são aquelas que permitem manter o
sistema dinâmico, operando dentro de algumas condições préestabelecidas.
• Variável controlada ou variável manipulada. A variável
controlada é a grandeza ou a condição que é medida e
controlada. A variável manipulada é a grandeza ou a condição
modificada pelo controlador, de modo que afete o valor da
variável controlada. Normalmente, a variável controlada é a
saída do sistema. Controlar significa medir o valor da variável
controlada do sistema e utilizar a variável manipulada ao
sistema para corrigir ou limitar os desvios do valor medido a
partir de um valor desejado.
2.2.3 Classificação de Sistemas
• Sistemas a controlar ou plantas. Um sistema a controlar
pode ser parte de um equipamento ou apenas um conjunto de
componentes de um equipamento que funcione de maneira
integrada, com o objetivo de realizar determinada operação
(componente mecânico, um forno, um reator químico ou uma
espaçonave).
• Processos. Uma operação contínua progressiva, artificial ou
voluntária, que consiste em uma série de ações ou movimentos
controlados para atingir resultados (processos químicos,
econômicos e biológicos).
2.2.3 Classificação de Sistemas
• Sistemas. Um sistema é a combinação de componentes
que agem em um conjunto para atingir determinado
objetivo. A idéia de sistema não fica restrito apenas a algo
físico. O conceito de sistema pode ser aplicado a
fenômenos
abstrados
dinâmicos,
como
aqueles
encontrados na economia. Dessa maneira, a palavra
“SISTEMA” pode ser empregada para se referir a sistemas
físicos, biológicos, econômicos e outros.
2.2.3 Classificação de Sistemas
Assumindo x como o vetor de variável de estados, u o vetor
de entrada (ou perturbação) e t como o tempo (um escalar):
a) x = f(x, u, t). Sistema não linear, depende do tempo e forçado.
b) x = f(x, t). Sistema não linear, depende do tempo e não forçado.
c) x = f(x, u). Sistema não linear, não depende do tempo e forçado.
d) x = f(x). Sistema não linear ou linear, não depende do tempo e
não forçado.
Sistemas do tipo (d) são também chamados de autônomos. Esta classe
de sistema será especialmente estudada.
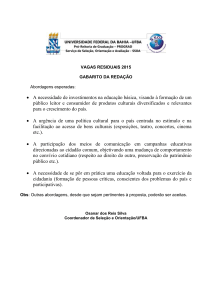
Exemplos de Sistemas de Controle
Sistema de Controle
de Velocidade.
Exemplos de Sistemas de Controle
Sistema de Controle
de Velocidade.
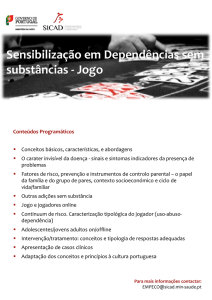
Exemplos de Sistemas de Controle
Sistema de Controle de Temperatura.
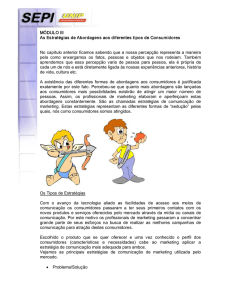
Exemplos de Sistemas de Controle
Controle de temperatura do compartimento
de passageiros de um carro
Exemplos de Sistemas de Controle
Sistema de Controle
Fluídico
Diagrama de bloco
Exemplos de Sistemas de Controle
Sistema de Controle
de Tensão
Exemplos de Sistemas de Controle
Esquema do
diagrama de
sistema de tração
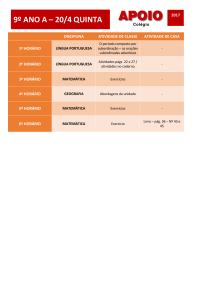
Exemplos de Sistemas de Controle
Diagrama de blocos de um sistema organizacional
de engenharia
2.2.3 Sistemas empresariais
2.2.4 O Uso de Ferramentas
Computacionais
A solução numérica de modelos de sistemas dinâmicos ou
a simulação computacional dos mesmos é facilmente
realizada através de softwares comerciais:
• Scilab (software disponível em www.scilab.org;
• Matlab (da Math Works Inc).
Esses programas são bastante simples e robustos. Possuem
uma quantidade ampla de comandos amigáveis pré-definidos
de uso direto e também permitem desenvolver programas
aplicativos de uma forma muito fácil por meio do
encadeamento de comandos ou funções específicas.
2.2.5 Abordagens Utilizadas
A abordagem será a mais didática e direta possível,
utilizando-se sempre de ilustrações, equações e
explicações pertinentes.
A maioria dos conceitos é proveniente da matemática,
física, química, etc. É importante ter os conhecimentos
básicos de cálculo, física, etc.
O exemplo a seguir ilustra o relacionamento de diversos
conceitos de áreas da matemática, física e outras para
realizar os procedimentos básicos na modelagem de
sistemas dinâmicos.
2.2.5 Abordagens Utilizadas
Seja o sistema elétrico do tipo RL.
I(t)
L
R
u(t)
Este sistema é regido pela seguinte equação: u (t ) RI (t ) L
dI (t )
dt
dI (t )
em que o termo
representa a derivada da corrente I em
dt
relação ao tempo t que circula neste circuito.
2.2.5 Abordagens Utilizadas
dI (t )
A solução da equação u(t ) RI (t ) L
depende de uma
dt
parcela transitória e de uma outra de regime permanente,
de forma que a resposta total é dada por:
R
t
(t )
I (t )
1 e L
R
A parcela exponencial refere-se à resposta transitória,
enquanto que a primeira parcela refere-se ao regime
permanente. Note que as seguintes características devem
ser explicadas:
R
t
(t )
L
I
(
t
)
1
e
2.2.5 Abordagens
R
• A parcela de regime transitório é assim chamada porque na
medida em que o tempo evolui, essa parcela tende a zero.
• A parcela de regime permanente é aquela que se mantém
após a resposta transitória cessar.
As afirmativas anteriores, todas válidas, trazem consigo
uma série de conceitos implícitos que devem ser
desmembrados. As seguintes etapas foram desenvolvidas
de forma a apresentar o exemplo:
R
t
(t )
L
I
(
t
)
1
e
2.2.5 Abordagens
R
A) MODELAGEM DO CIRCUITO
Esta fase é responsável por traduzir matematicamente um
sistema físico. O conhecimento dessa fase é fundamental
para a anásile do sistema, e seu aprendizado fornece ao
leitor condições de tirar comclusões imediatas a partir de uma
inspeção do processo.
Em nosso sistema da figura, somente o indutor tem condições
de armazenar energia, já que o resistor R é um elemento
dissipativo. Elementos armazenadores de energia são
traduzidos por equações diferenciais, e como o sistema da
figura tem somente um elemento desta natureza, a equação
que representa sua dinâmica é de 1ª ordem.
R
t
(t )
L
I
(
t
)
1
e
2.2.5 Abordagens
R
B) SOLUÇÃO DO SISTEMA DE EQUAÇÕES
Esta solução, embora trivial, necessita de conhecimentos
básicos de equações diferenciais. Esta formulação pode-se
complicar um pouco mais, na medida em que novos
armazenadores de energia forem considerados. Neste caso,
para cada armazenador, a ordem da equação representativa
do sistema aumenta também em um.
Dois armazenadores de energia produzirão uma equação
representativa de ordem 2, e assim sucessivamente. Para uma
dimensão elevada, representações matriciais podem ser
necessárias, necessitando conhecimentos de Álgebra Linear.
R
t
(t )
L
I
(
t
)
1
e
2.2.5 Abordagens
R
C) ANÁLISE DA RESPOSTA
A obtenção da resposta dinâmica do sistema pode ser dada
através de diversas metodologias. Diversos programas estão
sendo criados para gerar respostas dinâmicas dos sistemas.
Isso facilita a vida do engenheiro. No entanto, a resposta
crítica dos resultados obtidos depende do conhecimento do
engenheiro.
Nota-se na resposta obtida para o sistema da figura em estudo
que diversos elementos desempenham um papel na resposta
R
do sistema. A resposta do sistema é:
t
(t )
I (t )
1 e
R
L
R
t
(t )
L
I
(
t
)
1
e
2.2.5 Abordagens
R
A resposta desse sistema mostra que o comportamento da
corrente elétrica que flui no circuito elétrico depende dos
seguintes fatores:
• Tipo e amplitude da excitação ou entrada u(t).
Essa excitação, às vezes denominada fonte, será aqui chamada
de distúrbio. Há diferentes tipos de distúrbios e, para cada um,
uma resposta dinâmica diferente é obtida. De forma a comparar
o desmpenho de sistemas dinâmicos diferentes, muitas vezes
aplica-se a esses sistemas o mesmo distúrbio ou entrada.
R
t
(t )
L
I
(
t
)
1
e
2.2.5 Abordagens
R
• Valor da resistência R.
Esse componente desempenha um papel importante nas duas
parcelas da resposta. Assim, em relação à resposta de regime
permanente, quanto maior o valor de R, menor o valor da
corrente I. Esse componente também influencia a resposta
transitória.
Será mostrado que esse valor R desempenha um papel
importante no tempo e que a resposta transitória tende a
desaparecer. Observe a possibilidade da resistência R ter valor
nulo. Essa situação tende a produzir uma resposta transitória
incessante, o que não é desejável.
R
t
(t )
L
I
(
t
)
1
e
2.2.5 Abordagens
R
• Valor da induntância L.
Neste caso, somente a componente transitória é afetada, o que
implica também em um maior, ou menor, tempo de
acomodação da resposta.
• Sinal dos elementos.
Para o caso analisado, sabe-se que a resistência R e a
indudância L têm valores positivos, e isso se traduz em um
componente exponencial negativa, indicando que esta resposta
tende a desaparecer quando o tempo aumentar. Note que se o
sinal da exponencial for positivo, a resposta transitória tende a
crescer com o avanço do tempo, e a resposta total será
instável.
R
t
(t )
L
I
(
t
)
1
e
2.2.5 Abordagens
R
• Mudança de comportamento.
Se o sistema acima estiver associado a um elemento físico
real, é possível que a corrente elétrica tenha que satisfazer a
algumas condições de regime transitório e de regime
permanente. Caso essas condições não seja satisfeitas, o
Engenheiro deve alterar o sistema físico analisado. Isso pode
não ser trivial em alguns casos.
2.2.5 Conclusão
Como vimos, a análise da resposta dinâmica do sistema
requer conhecimentos bastante importantes, que devem ser
fornecidos gradativamente ao estudante.
Pretendemos encorajar a pesquisa das razões de um
sistema estar associado às respostas diferentes quando
sujeito a situações diferentes. Este conhecimento vai
permitir também atuar nesse sistema, de forma a melhorar o
seu desempenho.