Desenvolvimento de ferramenta de colaboração em massa
De apoio ao ensino de instrumentação industrial
Capítulo 3 – Instrumentos de Grandezas Vibracionais
Desenvolvimento de ferramenta de colaboração em massa
De apoio ao ensino de instrumentação industrial
Capítulo 3 – Instrumentos de medição de Grandezas de Vibração
(Deslocamento e Aceleração)
O que é a vibração?
• Em máquinas rotativas, a existência de vibrações mecânicas é um
fenômeno comum percebido em seus elementos. Por isso torna-se
necessário muitas vezes a inspeção e o monitoramento das grandezas
de Vibração, a fim de proteger e realizar manutenções adequadas.
O que é vibração?
• Uma vibração mecânica é o movimento de um corpo ou de um sistema que oscila
em torno de uma posição de equilíbrio.
• A maioria das vibrações em máquinas e estruturas é indesejável, devido ao
aumento de tensões nos elementos do sistema e nos seus componentes, bem
como devido às perdas de energia provocadas pelo atrito entre as partes em
contato na máquina.
• Em alguns casos é o próprio atrito o causador das vibrações. Por isso, as
vibrações devem ser eliminadas ou reduzidas a um nível mínimo aceitável.
O que é vibração?
• A Figura 1 ilustra a vibração descrita por um movimento oscilatório de um sistema
massa-mola.
Figura 1 - Vibração descrita por um movimento oscilatório de um sistema massa-mola.
Quais as grandezas de vibração?
• Os parâmetros para avaliação da vibração são descritos conforme a
Equação 1 do movimento oscilatório de um sistema massa-mola:
(1)
Fase
Frequência angular
Amplitude
Quais as grandezas de vibração?
• A Equação 1 expressa a vibração na grandeza deslocamento, mas também é
possível expressá-la em termos da velocidade e aceleração.
• A frequência angular é expressa pela Equação 2, em termos dos valores de
frequência e período do sinal de vibração.
(2)
Grandeza deslocamento de vibração
• É a grandeza que indica o quanto um corpo desvia de sua posição de equilíbrio.
Esta grandeza quantifica a amplitude máxima do sinal de vibração.
• Historicamente, esta grandeza foi a primeira a ser utilizada, devido aos recursos
dos instrumentos da época. O deslocamento normalmente é muito pequeno e é
medido em µm.
• Esta grandeza é muito utilizada quando se deseja avaliar e monitorar vibrações
de baixas frequências.
Instrumentação utilizada para a medição da grandeza deslocamento
• Para a instrumentação dedicada ao monitoramento do deslocamento em
vibrações, são usados sensores de proximidade. Esses sensores também
podem ser utilizados no controle de posicionamento, assim como os sensores
de posição que serão discutidos posteriormente.
• Dentre os principais sensores de proximidade, a seguir são classificados
segundo o princípio de funcionamento:
Sensor indutivo;
Sensor capacitivo;
Sensor magnético;
Sensor óptico;
LVDT.
Sensor Indutivo
• O sensor indutivo opera utilizando uma faixa de frequência de rádio com
um oscilador LC e uma bobina, gerando assim um campo magnético
induzido de alta frequência.
• Ao se aproximar um objeto metálico próximo ao sensor, são induzidas
correntes de Foucault e as perdas resultantes tiram energia do circuito
oscilador, reduzindo assim as oscilações. O comparador de sinal
converte essa mudança em um sinal bem definido.
Sensor Indutivo
• A Figura 2 apresenta o diagrama de funcionamento de um sensor indutivo.
Figura 2 – Diagrama de funcionamento de um sensor indutivo. (Fonte: Catálogo
Balluff)
Sensor Indutivo
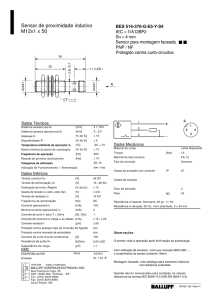
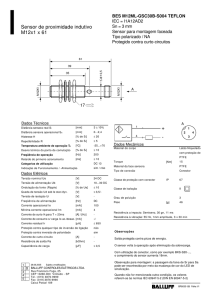
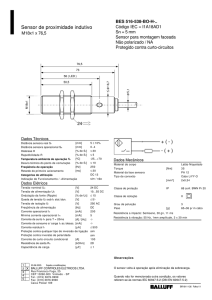
• O sensor indutivo é identificado seguindo seus parâmetros de construção e
operação, entre eles destacam-se:
Distância sensora (Sn): é a distância entre a placa de medição e a "superfície ativa"
do sensor de proximidade quando ocorre uma inversão do sinal. É um valor
tabelado pelo fabricante, mas pode afastar-se em até 10% do valor nominal. A
Figura 3 ilustra esse parâmetro.
0,9 Sn
Figura 3 – Distancia sensora (Sn). (Fonte: Catálogo Balluff)
1,1 Sn
Sensor Indutivo
Tipo do transistor no amplificador: os transistores podem ser do tipo NPN ou
PNP, compatível com circuitos integrados e com acionamento direto em relés. As
chaves de aproximação quando acionadas em PNP ligam o potencial positivo à
carga, quando acionadas em NPN ligam ao potencial negativo. A Figura 4 ilustra
os tipos de ligação do sensor.
Figura 4 – Esquemas de ligações do sensor PNP e NPN. (Fonte: Catálogo Balluff)
Sensor Indutivo
• Além dessas características elétricas, o sensor também é determinado pelo
diâmetro do sensor, o tipo de montagem, conexão e invólucro.
• A tensão de alimentação também é um fator na escolha do sensor, podendo ser
tanto tensão contínua ou alternada, a diferença está na incorporação de um
tiristor ao amplificador, atuando diretamente sobre um relé, ou contator.
A Figura 5 apresenta um exemplo de identificação de um Sensor Indutivo:
PS 2 -12 GI 50 - E2
NA
PNP
Ø = M12
Sn = 2 mm
Figura 5 – Exemplo de identificação de um sensor indutivo. (Fonte: Sense Sensores)
Precauções na Montagem de Sensores Indutivos
• Devido a possibilidade da existência de interferência mútua entre a montagem de
mais de um sensor, ou então do efeito de metais próximos, é necessário cuidados
em relação as distâncias de montagem dos sensores. A Figura 6 ilustra as
distâncias de montagens para múltiplos sensores indutivos.
Figura 6 – Distância de montagem de multiplos sensores indutivos. (Fonte: Catálogo Balluff)
•
A Figura 7 apresenta um exemplo de utilização do sensor indutivo.
Figura 7 - Medição de rotação de eixo utilizando sensor indutivo.
Sensor Capacitivo
• O sensor capacitivo consiste de uma placa capacitiva, um oscilador, um
retificador de sinal, um filtro e um circuito de saída, onde por meio da
placa capacitiva é gerado um campo elétrico.
• Quando um objeto de material metálico (ou não) se aproxima do sensor
a capacitância da placa capacitiva é aumentada e quando atinge um
valor determinado, o oscilador antes inativo, se ativa e por meio do
circuito de saída comuta o seu estado. A Figura 8 ilustra o diagrama de
funcionamento de um sensor capacitivo.
Figura 8 – Diagrama de funcionamento de um sensor capacitivo. (Fonte: Catálogo Balluff)
Sensor Capacitivo
• O sensor capacitivo, assim como o indutivo é identificado seguindo os seus
parâmetros de construção e operação como, por exemplo, a Distância
Sensora (Sn), tipo do transistor (PNP ou NPN), e diâmetro do corpo.
• No entanto, a escolha de um sensor blindado por um não-blindado é de
grande importância, dependendo do meio onde o sensor será aplicado, pois
um sensor blindado é indicado para a detecção de materiais de constante
dielétrica baixa, devido ao seu campo elétrico altamente concentrado.
• Entretanto, um sensor não-blindado será indicado para um ambiente
empoeirado e/ou úmido, pois um campo elétrico concentrado como o do
blindado levaria a falsas comutações.
Sensor Capacitivo
• A Figura 9 apresenta uma aplicação de sensor não-blindado, para medições,
onde não há a preocupação que o meio entre em contato com o sensor, ou seja,
o próprio sensor pode ser responsável pela medição e pela vedação de um furo.
Essa é uma prática muito utilizada na detecção de nível de um líquido em um
tanque.
Figura 9 – Exemplo de aplicação de sensor capacitivo não blindado. (Fonte: Imagem comercial
Internet)
Sensor Capacitivo
• Para um determinado tamanho do objeto-alvo, os fatores de correção para
sensores capacitivos são determinados segundo a constante dielétrica do
material do alvo. Como visto antes, materiais de baixa constante dielétrica são
difíceis de serem detectados enquanto os de alta são fáceis.
• A tabela 1 apresenta alguns materiais do nosso cotidiano com suas respectivas
constantes dielétricas.
Tabela 1
Sensor Magnético
• Os sensores magnéticos podem ser baseados no uso de campos magnéticos,
por meio de uma ampola Reed Switch e um ímã permanente, ou então por
princípio eletrônico.
• Os que usam ampola Reed Switch e ímã são simples de serem fabricados, e na
aproximação do objeto o sensor ativa a chave Reed Switch. O objeto pode ou
não possuir o ímã como constituinte.
Sensor Magnético
• Já os de princípio eletrônico baseiam-se no efeito Hall, onde um sensor de efeito
Hall é influenciado pela presença de um objeto entre as suas linhas de corrente.
•
O efeito Hall é composto de um campo cruzado entre as linhas de campo
elétrico e campo magnético, e a tensão de Hall é definida pela Equação 3.
(3)
Onde:
RH = o coeficiente Hall (Varia de material para material);
d = a espessura;
I = corrente elétrica;
B = campo Magnético.
• A Figura 10 ilustra um sensor magnético Reed Switch e a Figura 11 um sensor
magnético de Efeito Hall.
Figura 10 – Sensor magnético Reed
Switch em funcionamento. (Fonte:
http://www.alexandreaugusto.com.br/sens
or-magneticmagn%C3%A9tico-reedswitch-na)
Figura 11 – Sensor magnético Efeito Hall
em
funcionamento.
(Fonte:
http://www.eletrica.ufpr.br/edu/Sensores/2
000/neis/index.html)
Sensor Magnético
• Os sensores magnéticos são muito aplicados na detecção de posição
em pistões de cilindros pneumáticos. A Figura 13 ilustra alguns sensores
magnéticos de detecção em cilindros pneumáticos.
Figura 13 – Ilustração de sensores magnéticos de detecção em cilindros pneumáticos. (Fonte:
Imagem comercial Internet)
Sensor Óptico
• Os sensores ópticos são componentes eletrônicos de sinalização e
comando que executam detecção de qualquer material sem houver
contato entre eles. O princípio de funcionamento consistem basicamente
na existência de um emissor e um receptor, onde o sinal emitido pelo
emissor deve atingir com intensidade suficiente o receptor e assim
comutar a saída.
• Os sensores podem ser diferenciados em relação ao posicionamento do
emissor e receptor podendo ser classificados como:
Sensor óptico por retrorreflexão;
Sensor óptico por transmissão;
Sensor óptico por reflexão difusa.
Sensor Óptico
• A Figura 14 ilustra o diagrama de funcionamento de um Sensor óptico.
Figura 14 - Diagrama de blocos simples de um sensor óptico. (Fonte: Catálogo Balluff)
Sensor Óptico
• O sensor óptico por retrorreflexão possui o emissor e receptor montados no
mesmo corpo, mas há a presença de um refletor para o estabelecimento de
fluxo de luz entre eles. Quando é interrompido o feixe o sensor é ativado, no
entanto, objetos claros, brilhantes ou transparentes podem não ser detectados
por esse sensor. A Figura 15(a) apresenta o diagrama de funcionamento e a
Figura 15(b) o princípio de funcionamento do sensor por retrorreflexão.
(a)
(b)
Figura 15 - Diagrama de blocos de um sensor retrorreflexivo (a) e seu princípio de funcionamento (b).
(Fonte: Catálogo Balluff)
Sensor Óptico
• O sensor óptico por transmissão, também conhecido como por barreira
de luz, possui o emissor e receptor montados em dispositivos
separados. Os dois componentes criam um feixe de luz entre eles, que
quando um objeto atravessa o meio é interrompido o feixe e assim há a
comutação. A Figura 16(a) apresenta o diagrama de funcionamento e a
Figura 16(b) o princípio de funcionamento do sensor por barreira de luz.
(a)
(b)
Figura 16 - Diagrama de blocos de um sensor por barreira (a) e seu princípio de funcionamento (b).
(Fonte: Catálogo Balluff)
Sensor Óptico
• O sensor óptico por reflexão difusa possui o emissor e receptor
montados no mesmo dispositivo. A luz enviada pelo emissor cria uma
região ativa cuja presença de um objeto faz com que a luz seja refletida
de forma difusa de volta ao receptor, fazendo assim a comutação. A
presença de objetos de cor fosca não influi nesse sensor. . A Figura
17(a) apresenta o diagrama de funcionamento e a Figura 17(b) o
princípio de funcionamento do sensor por reflexão.
(a)
(b)
Figura 17 - Diagrama de blocos de um sensor por reflexão difusa (a) e seu princípio de funcionamento (b).
(Fonte: Catálogo Balluff)
• A Figura 18 ilustra a aplicação de sensores ópticos no ambiente industrial.
Figura 18 – Diversas aplicações de sensores ópticos no ambiente industrial. (Fonte: Catálogo Balluff)
LVDT
• O transformador linear variável (LVDT) consiste em um núcleo de material
magnético móvel e três bobinas que compreendem o transformador estático,
uma dessas três bobinas é o enrolamento primário e as outras duas são as
bobinas secundárias. A Figura 19 ilustra a estrutura interna de um sensor
LVDT.
Figura 19 – Estrutura interna de um sensor LDVT. (Fonte:
http://www.designnews.com/author.asp?section_id=1386&doc_id=229901 – Adaptado)
LVDT
• Principais aplicações de sensor LVDT:
Deslocamento;
Variação de espessura em peças;
Nível de fluido;
Velocidade e aceleração.
• A Figura 20 apresenta uma aplicação de calibração com o sensor LVDT.
Figura 20 - Calibração de relógio comparador utilizando LVDT.
RVDT
• O RVDT é utilizado na medição de ângulos e opera com o mesmo princípio
do sensor LVDT. Este sensor utiliza um núcleo rotativo ferromagnético. A
Figura 21 ilustra o princípio de funcionamento do sensor RVDT.
Figura 21 – Ilustração do princípio de funcionamento do sensor RVDT.
(Fonte:https://www.efunda.com/designstandards/sensors/lvdt/rvdt_intro.cfm adaptado)
A Figura 22 ilustra algumas aplicações de RVDT na indústria.
Figura 22 – Algumas aplicações do sensor RVDT na indústria. (Fonte:
http://metrolog.net/transdutores/rvdt.php?lang=ptbr)
Syncro
• Os motores syncros pertencem a uma categoria de componentes
eletromagnéticos, cujo o objetivo principal é de transmitir, receber ou
converter dados angulares. O syncro comporta-se tal como um motor (ou
gerador) síncrono, ou seja, um transformador rotativo onde o primário é o
rotor (dotado de bobina de excitação), e o secundário é o estator (dotado de
três bobinas interligadas em Y defasadas de 120 graus). A Figura 23 ilustra o
circuito interno de um syncro.
Figura 23 – Ilustração interna de um motor syncro. (Fonte:
Sensor potenciométrico
• Potenciômetros lineares são sensores que produzem uma resistência
proporcional ao deslocamento. O elemento resistivo é alimentado com uma
tensão CC ou CA e a tensão de saída é idealmente uma função linear do
deslocamento. Eles podem ser formados por fio enrolado ou plástico
condutor, no formato retangular ou cilíndrico. A Figura 24 ilustra o princípio
de funcionamento do sensor potenciométrico.
Figura 24 – Ilustração do princípio de funcionamento de um sensor potenciométrico. (Fonte:
• A Figura 25 apresenta uma aplicação didática com um
potenciométrico.
sensor
Figura 25 – Aplicação de sensor potenciométrico. Laboratório DMV FEG-UNESP
Encoders
• Encoders são dispositivos que convertem um deslocamento linear ou angular
em um trem de pulsos, e ainda podem ser interpretados como byte.
• Existem dois tipos de encoders:
Incremental
Absoluto.
• Os encoders incrementais indicam o deslocamento somente em relação a
um ponto inicial de referência. Os encoders absolutos medem o
deslocamento em relação a um ponto de referência interno do dispositivo.
Encoders
• Há três tipos de encoders incrementais: contato, óptico e magnético, que
podem ser lineares ou angulares. A Figura 26 ilustra a estrutura interna de
um encoder.
Figura 26 – Ilustração da estrutura interna de um encoder. (Fonte:
Sensor Incremental Linear Magnético
• Este transdutor é o mais usado, sendo constituído de um disco que
apresenta dois segmentos de material magnético (ferrite de bário
etc.) dispostos radialmente e de um sensor (placa de leitura) afixado
sobre um disco, como mostra a Figura 27.
Figura 27 – Ilustração do princípio de funcionamento do sensor incremental linear magnético.
(Fonte:
• Os encoders tem uma linha de aplicações bem ampla, como controle
numérico de máquinas operatrizes (CNC), controle de posição de disco
rígido de computador, servo-mecanismos, controle de posição remotas,
controle de posição de radar, robôs industriais, etc. A Figura 28 ilustra
algumas aplicações de encoders.
Figura 28 – Aplicações industriais de encoders.
Grandeza aceleração de vibração
• A amplitude da vibração pode ser quantificada de diversas
maneiras, tais como: nível pico- a-pico, nível de pico, nível médio e
o nível quadrático médio ou valor eficaz (ou RMS – Root Mean
Square).
• A Figura 29 a seguir apresenta as diversas formas de se quantificar
as vibrações.
Figura 29 – Formas de quantificar a amplitude de um sinal de vibração. (Fonte:
Acelerômetro piezoelétrico
• A essência desse tipo de acelerômetro é o material piezoelétrico, usualmente
uma
cerâmica
ferro-elétrica
polarizada
artificialmente.
Quando
mecanicamente tensionada, proporcional à força aplicada, gera uma carga
elétrica que polariza suas faces, como mostrado na figura a seguir. A Figura
30 ilustra a estrutura interna de um acelerometro piezoelétrico.
Figura 30 – Estrutura interna de um acelerômetro piezoelétrico. Fonte
:http://www.seara.ufc.br/tintim/tecnologia/acelerometro/acelerometro01.htm
Acelerômetro capacitivo
• Um capacitor simples consiste de duas placas metálicas separadas por
uma pequena distância. Entre elas está o ar ou algum material dielétrico
adequado. Colocando cargas elétricas de sinais opostos nessas placas,
como mostrado na Figura 31, surge uma diferença de potencial elétrico V
entre as placas.
Figura 31 – Ilustração do comportamento das placas de um capacitor (Fonte:
http://www.seara.ufc.br/tintim/tecnologia/acelerometro/acelerometro01.htm)
Acelerômetro capacitivo
•
Se as cargas nas placas forem mantidas constantes, a tensão nos
terminais de saída varia com a distância entre as placas.
•
Para gerar essa variação de distância em função da aceleração é
utilizada a técnica que faz a integração entre elementos mecânicos
(como sensores e atuadores) e componentes eletrônicos, tudo em
uma mesma pastilha de silício.
•
Esses dispositivos são chamados
ElectroMechanical Systems).
de
MEMS
(Micro-
Acelerômetro resistivo
• Por meio da técnica MEMS é construído um sistema, onde um corpo de
prova movimenta uma haste que por sua vez altera a resistência de uma
ponte resistiva, como mostrado na Figura 32.
Figura 32 – Ilustração da estrutura interna de um acelerômetro resistivo (Fonte:
http://www.sabereletronica.com.br/artigos/1240-comparativo-entre-acelermetros)
Acelerômetro Fibra óptica
• Fazem a Transdução da aceleração por meio da reflexão da luz que
atravessa um feixe de fibra ótica. A quantidade de luz recebida nos
sensores de luminosidade será proporcional a aceleração, uma vez que o
foco na superfície reflexiva muda com o movimento do corpo de prova. A
Figura 33 ilustra a estrutura interna de um acelerômetro de fibra óptica.
Figura 33 – Ilustração da estrutura interna de um acelerômetro de fibra óptica (Fonte:
http://www.sabereletronica.com.br/artigos/1240-comparativo-entre-acelermetros)
Acelerômetro piezoresistivo
• Nele o corpo de prova, com a massa que sentirá a variação de
aceleração, está suspensa sobre braços piezo-resistivos. Estes braços
formam uma ponte resistiva. A leitura da tensão sobre esta ponte indica
em qual eixo está a aceleração, e seu respectivo valor. A Figura 34
apresenta uma aplicação no laboratório de medição de aceleração de
vibração.
Figura 34 – Aplicação de acelerômetro capacitivo em Laboratório :
Referência Bibliográfica
- Catálogo de produtos Balluff;
- Site Sense Sensores;
- http://www.alexandreaugusto.com.br/sensor-magneticmagn%C3%A9ticoreed-switch-na;
- http://www.eletrica.ufpr.br/edu/Sensores/2000/neis/index.html;
- http://www.designnews.com/author.asp?section_id=1386&doc_id=229901;
- http://www.sabereletronica.com.br/artigos/1240-comparativo-entreacelermetros