Conversores de potência para a regulação da tensão da
rede distribuição BT com cargas desequilibradas
André Tiago Andrade Pimenta
Dissertação para obtenção do Grau de Mestre em
Engenharia Electrotécnica e Computadores
Orientador: Profª. Doutora Sónia Maria Nunes dos Santos Paulo Ferreira Pinto
Coorientador: Prof. Doutor José Fernando Alves da Silva
Júri
Presidente: Profª. Doutora Maria Eduarda de Sampaio Pinto de Almeida Pedro
Orientador: Profª. Doutora Sónia Maria Nunes dos Santos Paulo Ferreira Pinto
Vogal: Prof. Doutor Joaquim José Rodrigues Monteiro
Abril 2014
ii
Agradecimentos
A conclusão desta dissertação representa o fim de um ciclo que não seria possível sem o
contributo de algumas pessoas que me acompanharam durante o meu percurso no Instituto Superior
Técnico.
Em primeiro lugar gostaria de agradecer à Professora Doutora Sónia Pinto por toda a
disponibilidade e dedicação ao longo de todo este processo sem a qual a realização desta
dissertação teria sido bem mais complicada. Assim como ao Professor Doutor Fernando Silva pela
simpatia e pelas sugestões dadas ao longo de todo o trabalho que em muito contribuíram para o seu
enriquecimento.
Aos meus pais sem os quais todo este percurso seria impossível e por todo o apoio,
compreensão e paciência que tiveram comigo. À tia Bé pela inesgotável paciência, disponibilidade e
compreensão ao longo de todos estes anos. À minha irmã por toda a amizade que sempre tivemos.
À Ana Isabel por sempre me ter apoiado, ajudado e por todos os momentos passados juntos.
A todos os meus amigos que me acompanharam e marcaram estes anos fazendo deles algo
muito importante para mim, em especial ao David Bidarra, à Mariana Silva, ao Pedro Marques, à Rita
Pires, ao Ricardo Santana, ao Guilherme Quinaz, ao Pedro Santos e a todos os outros que estiveram
presentes de uma maneira ou de outra.
A todos muito obrigado.
iii
iv
Resumo
A qualidade da energia sempre foi uma questão de elevada importância no sistema eléctrico,
contudo devido às alterações no paradigma da produção de energia, principalmente no que diz
respeito à produção descentralizada, alterar o centro das preocupações da qualidade da energia.
Com a descentralização da produção a rede eléctrica deixou de ser considerar unidireccional e
passou a ter um caracter bidireccional, este facto fez com que as preocupações da qualidade da
energia passassem a estar centradas no valor eficaz nominal da tensão na rede de baixa tensão, nos
limites admissíveis para a sua variação e nas cavas de tensão, em vez de estarem centrados apenas
na não interrupção da alimentação. Este facto requer novas estratégias de regulação da tensão na
rede de baixa tensão de forma autónoma e eficaz.
Com o objectivo de responder a este desafio esta dissertação propõe um regulador activo da
tensão na rede de baixa tensão recorrendo a um conversor matricial de quatro braços para que seja
possível efectuar este regulação para situações de sistemas desequilibrados que é de facto o que
ocorre na rede eléctrica.
De modo a comprovar o funcionamento do sistema proposto são efectuados vários testes em
Matlab/Simulink de diferentes situações que podem ocorrer na rede de baixa tensão.
Palavras-Chave: Regulação de Tensão em Baixa Tensão, Sistemas Desequilibrados, Conversor
Matricial de Quatro Braços, Controlo Vectorial Directo, Cavas de Tensão, Sobretensões.
v
Abstract
Power quality has always been a matter of high importance to the electrical system, however
due to changes in the paradigm of energy production, especially with decentralized production, the
focus of power quality has change. With the decentralization of production the electricity grid is no
longer considered unidirectional and has passed to be considered a grid, this meant that the concerns
of power quality pass to be centred on the nominal effective value of the voltage on the low voltage
network, the acceptable limits for her variation and in sag voltage, instead of being centred not only in
a power failure. This requires new strategies to regulate voltage in low-voltage network autonomously
and effectively.
In order to meet this challenge this thesis proposes an active regulator of voltage on the low
voltage grid using a four arms matrix converter to be able to make this adjustment in situations of
unbalanced systems which is in fact what occurs in the network power.
In order to demonstrate the functioning of the proposed system are made a number of tests in
Matlab / Simulink of different situations that can occur on the low voltage grid.
Keywords:
Low Voltage Grid Regulation, Unbalanced System, Four Arms Matrix Converter,
Space Vector Control, Voltage Sag, Voltage Swells.
vi
Índice
1 Introdução ............................................................................................................................................ 1
2
1.1
Objectivos da Dissertação ....................................................................................................... 4
1.2
Estrutura da Dissertação ......................................................................................................... 4
Enquadramento e solução proposta ............................................................................................... 5
2.1
Qualidade da energia .............................................................................................................. 5
2.1.1
Valor eficaz da tensão ..................................................................................................... 5
2.1.2
Cavas de tensão ............................................................................................................... 6
2.2
Soluções existentes ................................................................................................................. 7
2.3 Solução proposta ........................................................................................................................... 8
3
Conversor Matricial ......................................................................................................................... 9
3.1
Introdução ao Conversor Matricial ......................................................................................... 9
3.1.1
3.2
Conversor Matricial de Quatro Braços para Sistemas Trifásicos .......................................... 11
3.2.1
Controlo do Conversor Matricial ................................................................................... 17
3.2.2
Modulação com Vectores Espaciais .............................................................................. 17
3.3
Dimensionamento dos semicondutores do conversor ......................................................... 23
3.3.1
Tensão máxima a suportar ............................................................................................ 23
3.3.2
Corrente máxima a suportar ......................................................................................... 23
3.4
4
Conversor Matricial de 4 Braços ................................................................................... 10
Dimensionamento dos elementos de filtragem .................................................................... 24
3.4.1
Dimensionamento do Filtro de Entrada do Conversor Matricial .................................. 24
3.4.2
Dimensionamento do filtro de saída do Conversor Matricial ....................................... 26
Controlo do Sistema ...................................................................................................................... 27
4.1
Controlo das correntes de saída............................................................................................ 27
4.2
Controlo do factor de potência à entrada do conversor....................................................... 31
4.3
Controlo da tensão na rede de baixa tensão ........................................................................ 34
5. Resultados ......................................................................................................................................... 37
5.1 Variação das correntes nas 3 fases da carga ............................................................................... 37
5.2 Desequilíbrio de uma das correntes de fase na rede de distribuição BT .................................... 40
5.3 Desequilíbrio das correntes em duas fases da rede de distribuição BT ...................................... 44
5.4 Sobretensão na média tensão ..................................................................................................... 46
5.5 Cava na média tensão ................................................................................................................. 49
6. Principais Conclusões ........................................................................................................................ 53
6.1 Conclusões................................................................................................................................... 53
vii
6.2 Perspectivas de trabalho futuro .................................................................................................. 54
Referências Bibliográficas ..................................................................................................................... 55
Anexo..................................................................................................................................................... 59
Anexo A ............................................................................................................................................. 59
Anexo B.............................................................................................................................................. 62
viii
Lista de Figuras
Figura 1.1 - Topologia da rede eléctrica .................................................................................................................. 1
Figura 1.2 - Esquema geral de microgeração.......................................................................................................... 2
Figura 1.3 - Topologia da rede eléctrica com microgeração .................................................................................... 2
Figura 2.1 - Exemplo de cava de tensão ................................................................................................................. 6
Figura 2.2 - Esquema da montagem proposta ........................................................................................................ 8
Figura 3.1 - Conversor Matricial Clássico Trifásico de Quarto Braços .................................................................. 10
Figura 3.2 - Zonas de tensão................................................................................................................................. 18
Figura 3.3 - Equivalente monofásico do filtro de entrada ...................................................................................... 25
Figura 3.4 - Equivalente monofásico do filtro de saída .......................................................................................... 26
Figura 4.1 - Saída do conversor matricial .............................................................................................................. 27
Figura 4.2 - Janela de erro .................................................................................................................................... 28
Figura 4.3 - Alimentação do conversor matricial.................................................................................................... 31
Figura 4.4 - Modelo de dimensionamento do controlo de tensão .......................................................................... 34
Figura 4.5 - Diagrama de blocos do controlo de tensão ........................................................................................ 35
Figura 5.1 - Correntes na rede BT obtidas quando ocorre variação das condições de carga ............................... 37
Figura 5.2 - Tensões na rede BT obtidas quando ocorre variação das condições de carga ................................. 38
Figura 5.3 - Correntes na rede MT obtidas quando ocorre variação das condições de carga ............................. 38
Figura 5.4 - Tensão e corrente na rede MT obtidas quando ocorre variação das condições de carga ................. 39
Figura 5.5 - Tensão no primário do transformador série obtidas quando ocorre variação das condições de carga
.............................................................................................................................................................................. 39
Figura 5.6 - Correntes na rede de BT obtidas quando ocorre um desequilíbrio numa das correntes de fase ....... 40
Figura 5.7 - Tensões na rede BT obtidas quando ocorre um desequilíbrio numa das correntes de fase .............. 41
Figura 5.8 - Correntes na rede MT obtidas quando ocorre um desequilíbrio numa das correntes de fase ........... 42
Figura 5.9 - Tensão e corrente na rede MT obtidas quando ocorre um desequilíbrio numa das correntes de fase
.............................................................................................................................................................................. 42
Figura 5.10 - Tensão no primário do transformador série obtidas quando ocorre um desequilíbrio numa das
correntes de fase ................................................................................................................................................... 43
Figura 5.11 – Correntes na rede BT obtidas quando ocorre um desequilíbrio em duas correntes de fase ........... 44
Figura 5.12 - Tensões na rede BT obtidas quando ocorre um desequilíbrio em duas correntes de fase .............. 45
Figura 5.13 - Correntes na rede MT obtidas quando ocorre um desequilíbrio em duas correntes de fase ........... 45
Figura 5.14 - Tensão e corrente na rede MT obtidas quando ocorre um desequilíbrio em duas correntes de fase
.............................................................................................................................................................................. 46
Figura 5.15 - Tensão na rede MT obtidas quando ocorre sobretensão na rede MT .............................................. 46
Figura 5.16 - Corrente na rede MT obtidas quando ocorre sobretensão na rede MT ............................................ 47
Figura 5.17 - Tensão e corrente na rede MT obtidas quando ocorre sobretensão na rede MT ............................ 47
Figura 5.18 - Tensões e correntes na rede BT obtidas quando ocorre sobretensão na rede MT ......................... 48
Figura 5.19 - Tensão no primário do transformador série obtidas quando ocorre sobretensão na rede MT ......... 48
Figura 5.20 - Tensões na rede MT obtidas quando o ocorre uma cava na rede MT ............................................. 49
Figura 5.21 - Corrente na rede MT ........................................................................................................................ 49
Figura 5.22 - Tensão e corrente na rede MT obtidas quando o ocorre uma cava na rede MT .............................. 50
Figura 5.23 - Tensões e correntes na carga obtidas quando o ocorre uma cava na rede MT .............................. 50
Figura 5.24 - Tensão no primário do transformador série obtidas quando o ocorre uma cava na rede MT .......... 51
ix
Lista de Tabelas
Tabela 1 - Combinação de estados dos interruptores .......................................................................... 13
Tabela 2 - Estados dos interruptores com componentes αβ0 .............................................................. 19
Tabela 3 - Resumo das correntes a suportar por cada semicondutor .................................................. 24
Tabela 4 - Parâmetros do filtro de entrada............................................................................................ 25
Tabela 5 - Parâmetros do filtro de saída ............................................................................................... 26
Tabela 6 - Selecção do vector para controlo da corrente ..................................................................... 30
Tabela 7 - Parâmetros do controlador PI .............................................................................................. 36
Tabela 8 - Dados de ensaio em vazio fornecido pelo fabricante .......................................................... 59
Tabela 9 - Dados de ensaio em vazio ................................................................................................... 59
Tabela 10 - Dados do ensaio em curto-circuito fornecidos pelo fabricante .......................................... 60
Tabela 11 - Dados de ensaio em curto-circuito..................................................................................... 60
Tabela 12 - Parâmetros do transformador de distribuição .................................................................... 61
Tabela 11 - Dados de ensaio em vazio fornecido pelo fabricante ........................................................ 62
Tabela 14 - Dados do ensaio em curto-circuito fornecidos pelo fabricante .......................................... 62
Tabela 15 - Parâmetros do transformador de série .............................................................................. 63
x
Lista de símbolos e variáveis
AC
Alternating Current – Corrente Alternada
AC/AC
Conversão electrónica de potência onde as grandezas de entrada e
saída são alternadas
AC/DC – DC/AC
Conversão electrónica de potência de grandezas alternadas com
conversão intermédia em grandezas contínuas
Susceptância dos enrolamentos de magnetização do transformador
C
Condensador do filtro de saída
Condensador do filtro de entrada
CMC
Conversor Matricial Clássico
CMCQB
Conversor Matricial Clássico de Quatro Braços
Transposta da transformação de Concordia
DC
Direct Current – Corrente Continua
DC/AC
Conversão electrónica de potência onde as grandezas de entrada são
contínuas e as grandezas à saída são alternadas
Sistema referenciado ao plano
DVR
Dynamic Voltage Restorer – Restaurador Dinâmico de Tensão
Erro da componente
Erro da componente
das correntes de saída do conversor
da corrente de entrada do conversor
Condutância dos enrolamentos de magnetização do transformador
Correntes de entrada do conversor
Correntes de saída do conversor
Corrente eficaz na fase A
Corrente de base
Corrente de carga
Corrente a suportar pelos semicondutores
Corrente máxima a suportar pelos semicondutores
Corrente eficaz a suportar pelos semicondutores
Corrente na linha
Valor eficaz da corrente de magnetização do transformador
Valor da corrente de magnetização em valores por unidade
xi
Corrente nominal do transformador
Corrente nominal do transformador em valores por unidade
Componentes
das correntes de saída do conversor
Componentes
das correntes de referência para saída do conversor
Componente
da corrente de entrada do conversor
Componente
da corrente de referência para entrada do conversor
Ganho integral do controlador PI
Ganho proporcional do controlador PI
Indutância do filtro de saída
Filtro passa baixo
Indutância do filtro de entrada
Potência activa trifásica de entrada do conversor matricial
Matriz de transformação de Blondel-Park
Potência de perdas no transformador no ensaio em curto-circuito
Potência de perdas no transformador no ensaio em curto-circuito em
valores por unidade
Perdas em vazio do transformador
Perdas em vazio do transformador em valores por unidade
Potência activa trifásica de entrada do conversor matricial
Potência reactiva de entrada do conversor matricial, em coordenadas dq
Resistência dos enrolamentos do primário e secundário do
transformador
Resistência dos enrolamentos do ramo de magnetização
Resistência de amortecimento colocada em paralelo com a bobina do
filtro
Resistência total de dispersão dos enrolamentos do primário e
secundário do transformador
Matriz de 3x4 elementos que representa o estado dos interruptores
bidireccionais do conversor matricial
Potência de base
Interruptor bidireccional que liga a fase k = {1, 2, 3, 4} de saída à fase
j= {1, 2 , 3 } de entrada de um conversor trifásico genérico
Transposta da matriz S
xii
Tempo de atraso na resposta do conversor
Sistema trifásico de tensões genérico
Tensão de base
Tensão de curto-circuito
Tensão de curto-circuito em valores por unidade
Tensão nominal do transformador no lado do secundário
Tensão nominal do transformador em valores por unidade
Tensões simples de entrada do conversor matricial
Tensão fase neutro à saída do conversor
Tensão aos terminais da carga
Tensão os terminais dos semicondutores
Tensão máxima a suportar pelos semicondutores
Tensão composta à saída do conversor
Tensões simples, em coordenadas de Park
Tensões simples em coordenadas
Reactância de dispersão dos enrolamentos do primário e secundário do
transformador
Reactância de magnetização do transformador
Reactância total de dispersão dos enrolamentos do primário e
secundário do transformador
Impedância de curto-circuito
Impedância característica do filtro de entrada
Sistema referenciado ao plano
xiii
xiv
1 Introdução
O sistema eléctrico português tinha na sua génese duas empresas uma responsável pela
produção e transporte de energia, a RNE, e outra responsável pela distribuição e comercialização
junto dos clientes, a EDP, que funcionavam em regime de monopólio, isto é, não havendo
concorrência no que diz respeito á produção e comercialização de energia.
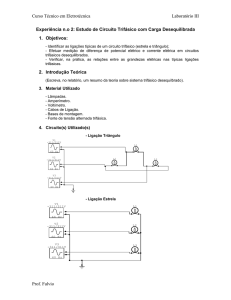
Desta forma e devido ao facto de a produção de energia se encontrar centrada nas grandes
centrais de produção a rede eléctrica podia ser considerada uma rede unidireccional, ou seja, o
trânsito de potência efectuava-se apenas no sentido produção centro de consumo como esquematiza
a Figura 1.1
Figura 1.1 - Topologia da rede eléctrica
Contudo, nos últimos anos têm ocorrido inúmeras alterações no sistema eléctrico sendo a
mais relevante a liberalização do mercado e a sua abertura à concorrência tendo como objectivo
beneficiar o consumidor final.
Uma das alterações mais importantes que ocorreram no sistema eléctrico com a sua
liberalização foi a descentralização da produção. A energia passou também a ser produzida junto dos
centros de consumo, tendo ocorrido um grande aumento deste tipo de produção devido aos
incentivos dados pelo Estado por grande parte desta energia ser de origem renovável.
Outra alteração importante que ocorreu no sistema eléctrico foi o facto dos consumidores
finais passarem a poder, também eles serem produtores de energia, constituindo aquilo a que se
chama, microprodutores.
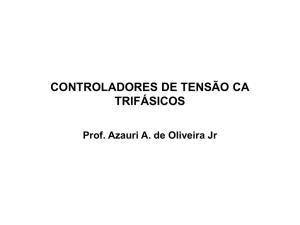
A microgeração consiste na produção descentralizada de energia em pequena escala pelo
próprio consumidor (particular ou empresa), através de painéis solares fotovoltaicos, aerogeradores,
caldeiras de biomassa, microturbinas em instalações de baixa tensão e pequena potência podendo
essa energia ser injectada e vendida à rede. (Figura 1.2)
1
Figura 1.2 - Esquema geral de microgeração
Estas mudanças no sector eléctrico colocaram novos desafios, nomeadamente no que diz
respeito à qualidade da energia.
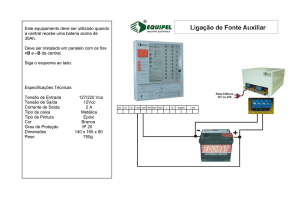
Com o crescente número de unidades de microgeração ligados à rede de baixa tensão, o
trânsito de energia deixou de ser unidireccional, passando a poder ser bidireccional, dependendo das
condições de carga da rede (Figura 1.3)
Figura 1.3 - Topologia da rede eléctrica com microgeração
É nas horas de vazio que pode ocorrer com maior frequência a mudança de sentido no
trânsito de potência, pois nesse momento o consumo de energia é reduzido. É também nas horas de
vazio que, o facto de os microprodutores estarem a injectar energia na rede poderá resultar em
sobretensões nos locais de injecção.
2
Isto acontece porque a maioria dos sistemas de microgeração que actualmente se encontram
instalados detectam se a tensão no ponto de injecção se encontra ou não dentro dos limites
permitidos pela norma NP EN 50 160. Contudo é de diminuir o valor da corrente injectada de modo a
não causar sobretensões na rede de distribuição. Por esse motivo, para evitar sobretensões o
sistema de microgeração diminui a potência injectada ou chega mesmo desligar-se interrompendo
assim a injecção de energia na rede.
Quando esta situação ocorre, a venda de energia, por parte do microprodutor, é interrompida,
fazendo com que diminuam os seus rendimentos, aumentado assim o tempo de amortização do
investimento feito no sistema de microgeração. É importante por isso encontrar uma solução para
este tipo de problemas
Compreende-se assim, que o problema das quedas de tensão ao longo da rede deixa de ser
prioritário passando a prioridade a recair sobre as sobretensões originadas pela inclusão destes
sistemas na rede e na mitigação das cavas de tensão. No que diz respeito às cavas de tensão a
diminuição da tensão de alimentação em determinados centros de consumo, nomeadamente nas
industrias, tem efeitos nefastos para alguns equipamentos, podendo levar a reset’s de variadores de
velocidade, autómatos e redes de comunicação, falhas em arranques de motores deslastre de
contactares entre outros [Jorge H, 2001].
Esta dissertação propõe-se encontrar uma solução para mitigar estes dois problemas da rede
de distribuição, uma vez que permite o controlo em simultâneo das cavas de tensão e das
sobretensões.
3
1.1 Objectivos da Dissertação
A realização desta dissertação tem como objectivo realizar o estudo de um sistema de
regulação da tensão na rede de baixa tensão para sistema desequilibrados, que permita não só
minimizar os efeitos das cavas de tensão mas também mitigar o efeito de sobretensões nas redes de
distribuição.
Este estudo é feito recorrendo à ferramenta do Simulink no Matlab que permitirá obter
resultados para diferentes situações de funcionamento, tanto no que diz respeito a cavas de tensão
como a sobretensões.
Foi realizado um estudo da topologia de conversor a usar, dimensionando o controlo
adequado às diferentes situações de funcionamento, assim como os elementos de filtragem
necessários.
1.2 Estrutura da Dissertação
Esta dissertação encontra-se estruturada em 6 capítulos e anexos do seguinte modo.
No capítulo um é feito um breve enquadramento da dissertação explicando os principais
motivos para a utilização de reguladores electrónicos em transformadores BT.
No capítulo dois é apresentada a norma que define a qualidade da energia no sistema
eléctrico (NP EN 50 160) explicando-se quais os principais aspectos da mesma tidos em conta na
elaboração desta dissertação. É também especificada a solução proposta nesta dissertação para a
regulação da tensão na rede BT.
No capítulo três faz-se a apresentação do sistema proposto descrevendo o conversor
matricial utilizado na dissertação, dimensionando os semicondutores que constituem o conversor
assim como os componentes de filtragem necessários para o sistema.
No capítulo quatro é feita a descrição das diferentes partes do controlo do sistema, tanto do
controlo das correntes de entrada e saída do conversor como o controlo da tensão da rede BT.
No capítulo cinco são apresentados e discutidos os resultados de simulação obtidos com a
ferramenta do Simulink no Matlab.
No capítulo seis são apresentadas as conclusões do trabalho e propostos futuros temas de
estudo relacionados com o trabalho realizado.
Em anexo encontram-se o dimensionamento dos transformadores do sistema proposto assim
como o esquema geral do sistema obtido na ferramenta do Simulink no Matlab.
4
2 Enquadramento e solução proposta
2.1 Qualidade da energia
A qualidade da energia entregue aos consumidores finais é actualmente uma das maiores
preocupações do sistema eléctrico.
Actualmente, a energia eléctrica é um bem fundamental cuja falha pode originar inúmeros
prejuízos. Contudo, hoje em dia, não é só na continuidade do serviço que se reflecte a qualidade da
energia. Aspectos como a amplitude ou frequência da tensão, desequilíbrios entre fases e conteúdos
harmónicos estão também no centro das preocupações.
A globalização afectou não só a economia, a cultura ou a politica mas também a energia. Os
sistemas eléctricos não estão confinados apenas a um país existindo interligações entre diferentes
países. No caso de Portugal pode considerar-se que o sistema eléctrico se encontra interligado não
apenas com Espanha mas com toda a Europa, tornando assim a questão da qualidade da energia um
problema internacional.
Deste modo, devido às interligações existentes entre os vários países, e de modo a
uniformizar os parâmetros de qualidade de energia, foi necessário definir a norma NP EN 50 160 que
estabelece os critérios de qualidade da energia no ponto de entrega ao cliente, (tensão de
alimentação fornecida por uma rede de energia eléctrica de tensão inferior a 150kV, em condições
normais de exploração).
Na realização desta dissertação os dois pontos que é importante analisar dizem respeito a:
Valor eficaz nominal da tensão na rede de baixa tensão e os limites admissíveis para
a sua variação
2.1.1
Cavas de tensão
Valor eficaz da tensão
Segundo a norma NP EN 50 160 o valor nominal da tensão em BT é de 230 Volts entre fase e
neutro e 400 Volts entre fases.
Idealmente a rede de baixa tensão devia ser composta por um sistema trifásico equilibrado
caracterizado pelo facto da soma das tensões em cada fase ser igual a zero (1.1)
Contudo o sistema, não é na sua generalidade um sistema ideal ocorrendo, por isso,
variações nos valores nominais das tensões na linha. De modo a garantir a qualidade de energia
entregue aos consumidores, a norma NP EN 50 160, define os limites admissíveis para estas
variações tendo este de se encontrar numa gama de
em 95% dos valores eficazes médios em
cada período de 10 minutos medidos ao longo de uma semana.
5
Conclui-se assim que a tensão simples deve variar entre (1.2)
A regulação da tensão na rede de baixa tensão neste momento não pode ser feita em tempo
real. Os transformadores usados nos postos de distribuição possuem tomadas de regulação que
permitem uma regulação por escalões, tipicamente 5. Estes escalões permitem alterar a relação de
transformação e assim alterar o valor da tensão à saída do transformador. Contudo, estas mudanças
de escalão em geral têm de ser feitas com o transformador desligado.
Apesar de existir esta possibilidade de alterar os escalões dos transformadores nos postos de
distribuição a sua realização não é fácil nem rápida o que os torna insensíveis às sobretensões
provocadas por microgeração.
2.1.2
Cavas de tensão
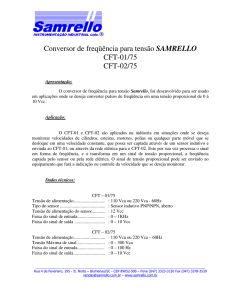
Para caracterizar uma cava de tensão a norma NP50160 utiliza o seguinte critério: “O início
ocorre quando, num determinado ponto da rede, o valor eficaz da tensão de uma ou mais fases cai
repentinamente para um valor situado entre 90 % e 5 % da tensão declarada Uc e termina quando a
tensão retoma um valor acima de 90 % de Uc acrescido de um valor de histerese.” (Figura 2.1)
Figura 2.1 - Exemplo de cava de tensão
As cavas de tensão podem ter origem em agentes naturais ou em elementos do próprio
sistema eléctrico.
No grupo dos agentes naturais podem estar descargas atmosféricas, intempéries com ventos
e chuvas fortes ou ainda o contacto de fauna ou flora com as linhas eléctricas [Silva J., 2008]. Estes
agentes naturais podem causar curto-circuito num determinado ponto da rede levando a uma
diminuição do valor da tensão nesse local que posteriormente se irá propagar ao restante sistema.
No caso dos elementos do próprio sistema estes podem ser falhas de isolamento dos
equipamentos, tanto do lado do cliente como do próprio sistema eléctrico, ou ainda a ligação de
6
cargas fortemente indutivas fazendo com que durante o transitório ocorra um(a) pico de corrente
levando a uma apreciável queda de tensão na rede.
Enquanto que as sobretensões originadas pela microgeração são mais gravosas para o
microprodutor e cargas adjacentes, as cavas de tensão são mais gravosas para a qualidade geral da
energia no sistema eléctrico.
A solução habitualmente usada para mitigar este problema é a utilização do sistema DVR
(Dynamic Voltage Restorer) [Gambôa, P.,2009], que é ligado em série com a linha de distribuição que
alimenta a carga e tem como objectivo elevar a tensão durante a perturbação, de maneira a garantir
que a tensão de alimentação à carga se mantém. Esta solução não tem tido uma grande
implementação pois os custos associados à sua montagem face aos benefícios económicos
conseguidos não são vantajosos. Isto deve-se ao facto da implementação deste sistema requerer a
utilização de um transformador de potência adicional, o que vai incrementar o seu preço.
2.2 Soluções existentes
As soluções propostas hoje em dia não são integradas, isto é, apenas com um sistema não é
possível controlar simultaneamente as cavas de tensão e as sobretensões, com a agravante de os
sistemas existentes para o controlo das sobretensões não serem sensíveis às sobretensões
provenientes da microgeração, isto é, no caso da regulação dos transformadores ela é fixada
manualmente e na altura da instalação do mesmo o que não permite sensibilidade a variações de
tensões a jusante.
Deste modo nos últimos anos tem sido feito um esforço no sentido de encontrar soluções que
possam solucionar simultaneamente ambos os problemas.
Um dos sistemas estudados é a inclusão de conversores electrónicos de potência no posto
de transformação ligados em série com a saída para a linha de baixa tensão de modo a poder alterar
a tensão de alimentação do centro de consumo.
Existem algumas soluções que neste momento estão a ser estudadas. Uma delas tem
algumas semelhanças com a solução DVR pois também apresenta capacidade de armazenamento
de energia. Neste caso é utilizado um conversor AC/DC-DC/AC com armazenamento intermédio.
Esta solução apesar de mais económica que a DVR apresenta ainda a necessidade de
armazenamento intermédio de energia não sendo por isso a mais atractiva. Outra solução proposta é
a utilização de um conversor matricial AC/AC, sendo esta que foi adoptada nesta dissertação.
7
2.3 Solução proposta
Assim com vista a resolver os problemas anteriormente descritos e ainda a incapacidade dos
sistema existentes resolverem os problemas das sobretensões a presente dissertação propõe a
montagem abaixo representada. (Figura 2.2)
Figura 2.2 - Esquema da montagem proposta
A solução proposta adiciona aos postos de transformação já existentes um conversor AC/AC,
um transformador série, de potência bastante inferior ao transformador de distribuição e um filtro de
entrada e saída do conversor.
A ligação do conversor AC/AC em paralelo com a linha de distribuição através do
transformador série vai permitir ao sistema introduzir uma tensão em série com a tensão da linha de
distribuição de modo a manter esta dentro dos limites definidos pela norma.
A tensão a introduzir através do transformador série deverá estar em fase com a tensão da
rede caso ocorra uma cava de rede, para deste modo compensar a diminuição da amplitude da
tensão na rede de distribuição, ou em oposição de fase, caso ocorra uma sobretensão, de modo a
diminuir o valor da tensão na rede de distribuição.
Face às soluções já existentes, esta permite compensar as cavas de tensão evitando o
armazenamento de energia e, em relação às sobretensões consegue efectuar a sua compensação
por tempo indeterminado.
Outra característica deste sistema é que permite fazer a compensação do factor de potência
do lado da média tensão, garantindo assim, uma optimização do sistema eléctrico nacional (SEN),
uma vez que permite diminuir o uso de baterias de condensadores usados para a sua compensação
nos barramentos de média e alta tensão.
Esta solução já se encontra em estudo para rede equilibradas, isto é, quando as cavas ou
sobretensões ocorrem de igual modo nas três fases.
Nesta dissertação o sistema estudado e implementado refere-se a situações de desequilíbrio,
ou seja, a montagem proposta tem como objectivo controlar cavas e sobretensões que possam
ocorrer de forma distinta em cada fase, algo mais próximo do sistema eléctrico real, visto que as
cavas e sobretensões equilibradas são menos frequentes.
8
3 Conversor Matricial
3.1 Introdução ao Conversor Matricial
Os conversores matriciais existentes podem ser divididos tendo em conta o modo como realizam
a conversão de energia, podendo esta ser feita de forma directa (conversão AC/AC) ou de forma
indirecta (conversão AC/DC/AC) [Friedli, T, 2012].
O modo de conversão directa apresenta algumas vantagens em relação à conversão
indirecta, sendo uma delas o facto de dispensar o andar intermédio DC aumentado assim o
rendimento e, permitindo também, diminuir o volume e peso do conversor. Outra vantagem é a
capacidade de fornecer à saída tensões de amplitude e frequência variável.
Nesta dissertação optou-se pela utilização do conversor matricial clássico. Contudo, devido
ao objectivo desta dissertação ser controlar um sistema desequilibrado, na saída do conversor a
soma das três correntes não é zero, isto é:
Este facto leva à existência de corrente de neutro
o que implica que seja necessário
considerar mais um braço em relação ao conversor matricial clássico, para que possa haver trânsito
da corrente de neutro.
Sendo assim, nesta dissertação é usado um conversor matricial clássico de quatro braços
(CMCQB).
9
3.1.1
Conversor Matricial de 4 Braços
O conversor matricial clássico de quatro braços (CMCQB) (Figura3.1) é em tudo semelhante
ao conversor matricial clássico (CMC), ou seja, é um conversor electrónico de potência de AC para
AC, não tendo por isso um andar intermédio de armazenamento de energia, e que apresenta um
rendimento elevado [Friedli, T., 2012], sendo constituído unicamente por semicondutores que
permitem um fluxo de potência bidireccional.
Figura 3.1 - Conversor Matricial Clássico Trifásico de Quarto Braços
Contudo, devido às limitações tecnológicas ainda existentes, na área de semicondutores de
potência capazes de suportar tensões e conduzir correntes bidireccionais, actualmente estes
conversores (CMC e CMCQB) são constituídos por uma associação de semicondutores comandados
ao corte e à condução e, eventualmente díodos, de modo a formarem unidades cujo comportamento
os aproxima a um interruptor bidireccional (IB) [Wheeler P. et al, 2002].
10
A utilização de interruptores bidireccionais permite aos conversores matriciais a ligação de
qualquer uma das fases de saída a uma das fases de entrada, possibilitando ainda que o fluxo de
energia seja bidireccional (a corrente tanto pode fluir no sentido gerador-receptor como receptorgerador). Por esta razão são caracterizados como conversores com característica regenerativa.
Existem várias associações possíveis por forma a obter interruptores bidireccionais. De forma
a maximizar o rendimento do conversor matricial as soluções mais usadas são as que apresentam o
menor número de semicondutores em condução, sendo por isso usada a solução da ligação de dois
transístores IGBT em montagem de colector comum ou emissor comum com dois díodos em antiparalelo [Silva, J.F., 2012].
3.2 Conversor Matricial de Quatro Braços para Sistemas Trifásicos
O conversor matricial de quatro braços é constituído por doze interruptores bidireccionais
totalmente comandados formando uma matriz 3x4, que permite ligar dois sistemas trifásicos um com
características de fonte de tensão e outro com características de fonte de corrente.
A existência de 12 interruptores permitiria obter um total de 4096 (
) combinações possíveis
para o estado dos interruptores. Contudo, devido à existência de restrições topológicas, não é
possível curto-circuitar entradas de um sistema com carácter de fonte de tensão (entrada do
conversor) nem colocar em circuito aberto um sistema com carácter de fonte de corrente (saída do
conversor), o número de combinações possíveis é reduzido para 81
.
Considerando que os semicondutores presentes nos interruptores bidireccionais apresentam
um comportamento ideal, cada interruptor pode ser representado por uma variável
{
}
{
} podendo assumir o valor lógico
ou
caso o interruptor esteja
fechado (ON) ou aberto (OFF) respectivamente.
Considerando esta representação a matriz de estados dos interruptores pode ser expressa
por (3.2):
[
]
Para que as restrições topológicas referidas anteriormente sejam garantidas é fundamental
garantir, por um lado, que à saída do conversor exista sempre um caminho possível por onde a
corrente possa fluir, implicando assim que em cada linha de
exista sempre um interruptor com
estado lógico 1 e, por outro lado, de modo a evitar curto-circuitos entre fases, que em cada linha de
não exista mais que um interruptor com estado lógico 1. Deste modo é necessário garantir que a
soma instantânea de cada linha da matriz
é sempre igual a 1.
11
∑
Conclui-se assim que as restrições topológicas implicam que em cada instante cada fase de
saída esteja ligada a uma só fase de entrada.
A matriz S permite relacionar as tensões simples de saída do conversor
tensões simples de entrada do conversor
com as
. É também possível relacionar as correntes de
entrada com as correntes de saída do conversor, sendo para isso necessário utilizar a transposta de
.
[
]
[ ]
[ ]
[ ]
Com base nestas relações é possível obter o valor das grandezas eléctricas em cada instante
com base na combinação de estados dos interruptores.
A tabela 1 apresenta as 81 combinações possíveis.
12
Estado
Tabela 1 - Combinação de estados dos interruptores
S11
S12
S13
S21
S22
S23
S31
S32
S33
S41
S42
S43
VA
VB
VC
VN
VAN
VBN
VCN
Ia
Ib
Ic
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
0
0
1
0
0
0
0
1
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
1
0
0
0
1
0
0
1
0
0
1
0
0
1
0
0
0
0
1
0
0
0
1
1
0
0
0
1
0
0
1
0
0
1
0
0
1
1
0
0
0
1
0
0
1
0
1
0
0
0
0
1
0
1
0
0
1
0
0
1
0
1
0
0
1
0
0
0
1
1
0
0
0
1
0
0
1
0
0
0
0
1
0
0
1
0
0
1
0
0
0
1
1
0
0
0
1
0
0
1
1
0
0
0
1
0
0
1
0
0
1
0
0
1
0
1
0
0
0
0
1
0
1
0
1
0
0
1
0
0
1
0
0
1
0
0
0
1
1
0
0
0
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
0
1
1
0
1
0
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
Va
Vb
Vc
Va
Vb
Vb
Vc
Vc
Va
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Va
Vb
Vc
Vb
Va
Vc
Vb
Va
Vc
Va
Vb
Vb
Vc
Vc
Va
Vb
Va
Vc
Vb
Va
Vc
Va
Vb
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Va
Vb
Vb
Vc
Vc
Va
Va
Vb
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
0
0
0
VAB
-VAB
VBC
-VBC
VCA
-VCA
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
VAB
-VAB
VBC
-VBC
VCA
-VCA
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
VAB
-VAB
VBC
-VBC
VCA
-VCA
0
0
0
IA
-IA
0
0
-IA
IA
IB
-IB
0
0
-IB
IB
IC
-IC
0
0
-IC
IC
0
0
0
-IA
IA
IA
-IA
0
0
-IB
IB
IB
-IB
0
0
-IC
IC
IC
-IC
0
0
0
0
0
0
0
-IA
IA
IA
-IA
0
0
-IB
IB
IB
-IB
0
0
-IC
IC
IC
-IC
13
Estado
S11
S12
S13
S21
S22
S23
S31
S32
S33
S41
S42
S43
VA
VB
VC
VN
VAN
VBN
VCN
Ia
Ib
Ic
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
1
0
0
0
0
1
0
1
0
0
1
0
1
0
0
0
0
1
1
0
0
0
0
1
0
1
1
0
0
0
1
0
0
1
0
0
0
1
1
0
0
0
0
1
1
0
0
0
0
0
0
1
1
0
0
0
1
0
0
1
0
0
0
1
1
0
0
0
0
1
1
0
1
0
0
0
0
1
1
0
0
0
0
1
0
1
0
0
1
0
1
0
0
0
0
1
0
1
1
0
0
0
0
1
1
0
0
0
1
0
0
1
0
0
0
1
1
0
0
0
0
0
0
1
1
0
0
0
0
1
1
0
0
0
1
0
0
1
0
0
0
1
1
0
0
1
0
0
1
0
1
0
0
0
0
1
1
0
0
0
0
1
1
0
0
0
0
1
1
0
0
1
0
0
0
1
1
0
0
0
0
1
1
0
0
0
0
1
1
0
0
0
0
0
1
0
0
1
0
0
0
1
1
0
0
0
0
1
1
0
0
0
0
1
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
Va
Vb
Vb
Vc
Vc
Va
Vb
Va
Vc
Vb
Va
Vc
Va
Vb
Vb
Vc
Vc
Va
Va
Vb
Vb
Vc
Vc
Va
Va
Vb
Vb
Vc
Vc
Va
Va
Vb
Vb
Vc
Vc
Va
Vb
Va
Vc
Vb
Va
Vc
Va
Vb
Vb
Vc
Vc
Va
Vb
Va
Vc
Vb
Va
Vc
Va
Vb
Vb
Vc
Vc
Va
Va
Vb
Vb
Vc
Vc
Va
Va
Vb
Vb
Vc
Vc
Va
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
VAB
-VAB
VBC
-VBC
VCA
-VCA
0
0
0
0
0
0
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
0
0
0
0
0
0
VAB
-VAB
VBC
-VBC
VCA
-VCA
0
0
0
0
0
0
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
IA+IB
IC+IN
0
0
IC+IN
IA+IB
IB+IC
IA+IN
0
0
IA+IN
IB+IC
IA+IC
IB+IN
0
0
IB+IN
IA+IC
-IN
IN
0
0
IN
-IN
IC+IN
IA+IB
IA+IB
IC+IN
0
0
IA+IN
IB+IC
IB+IC
IA+IN
0
0
IB+IN
IA+IC
IA+IC
IB+IN
0
0
IN
-IN
-IN
IN
0
0
0
0
IC+IN
IA+IB
IA+IB
IC+IN
0
0
IA+IN
IB+IC
IB+IC
IA+IN
0
0
IB+IN
IA+IC
IA+IC
IB+IN
0
0
IN
-IN
-IN
IN
14
Estado
S11
S12
S13
S21
S22
S23
S31
S32
S33
S41
S42
S43
VA
VB
VC
VN
VAN
VBN
VCN
Ia
Ib
Ic
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
1
0
0
0
0
1
1
0
0
0
0
1
1
0
0
0
0
1
0
1
1
0
0
0
0
1
1
0
0
0
0
1
1
0
0
0
0
0
0
1
1
0
0
0
0
1
1
0
0
0
0
1
1
0
1
0
0
0
0
1
0
0
1
1
0
0
0
0
1
1
0
0
0
1
1
0
0
0
0
0
0
0
1
1
0
0
0
0
1
1
0
0
0
1
1
0
1
1
0
0
0
0
1
1
0
0
0
0
0
0
1
1
0
0
1
0
0
0
0
1
0
0
1
1
0
0
0
0
0
0
1
1
0
1
1
0
0
0
0
0
0
0
1
1
1
1
0
0
0
0
0
0
0
1
1
0
1
1
0
0
0
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
Va
Vb
Vb
Vc
Vc
Va
Va
Vb
Vb
Vc
Vc
Va
Va
Vb
Vb
Vc
Vc
Va
Va
Vb
Vb
Vc
Vc
Va
Vc
Vc
Va
Va
Vb
Vb
Vc
Vc
Va
Va
Vb
Vb
Vc
Vc
Va
Va
Vb
Vb
Va
Vb
Vb
Vc
Vc
Va
Vc
Vc
Va
Va
Vb
Vb
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
Vb
Va
Vc
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
VAB
-VAB
VBC
-VBC
VCA
-VCA
-VBC
VCA
-VCA
VAB
-VAB
VBC
IA+IB
IN
IC
IC
IN
IA+IB
IA+IC
IN
IB
IB
IN
IA+IC
IA
IN
IB+IC
IB+IC
IN
IA
IN
IA+IB
IA+IB
IN
IC
IC
IN
IA+IC
IA+IC
IN
IB
IB
IN
IA
IA
IN
IB+IC
IB+IC
IC
IC
IN
IA+IB
IA+IB
IN
IB
IB
IN
IA+IC
IA+IC
IN
IB+IC
IB+IC
IN
IA
IA
IN
15
Estado
S11
S12
S13
S21
S22
S23
S31
S32
S33
S41
S42
S43
VA
VB
VC
VN
VAN
VBN
VCN
Ia
Ib
Ic
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
1
1
1
1
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
1
1
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
1
1
1
1
0
0
0
0
0
0
1
1
1
0
0
0
1
1
1
0
0
0
1
1
1
0
0
0
0
0
0
0
0
0
0
0
0
1
1
1
0
0
0
1
1
1
0
0
0
1
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
1
0
0
0
1
1
1
0
0
0
1
1
1
0
0
0
0
0
0
1
1
1
0
0
0
1
1
1
0
0
0
1
1
1
0
0
0
0
0
0
0
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
Va
Va
Va
Va
Va
Va
Vb
Vb
Vb
Vb
Vb
Vb
Vc
Vc
Vc
Vc
Vc
Vc
Vb
Vb
Vb
Vc
Vc
Vc
Va
Va
Va
Vc
Vc
Vc
Va
Va
Va
Vb
Vb
Vb
Vc
Vc
Vc
Vb
Vb
Vb
Vc
Vc
Vc
Va
Va
Va
Vb
Vb
Vb
Va
Va
Va
Va
Vb
Vc
Va
Vb
Vc
Va
Vb
Vc
Va
Vb
Vc
Va
Vb
Vc
Va
Vb
Vc
0
VAB
-VCA
0
VAB
-VCA
-VAB
0
VBC
-VAB
0
VBC
VCA
-VBC
0
VCA
-VBC
0
-VAB
0
VBC
VCA
-VBC
0
0
VAB
-VCA
VCA
-VBC
0
0
VAB
-VCA
-VAB
0
VBC
VCA
-VBC
0
-VAB
0
VBC
VCA
-VBC
0
0
VAB
-VCA
-VAB
0
VBC
0
VAB
-VCA
IA+IN
IA
IA
IA+IN
IA
IA
IB+IN
IB
IB
IC+IN
IC
IC
IB+IN
IB
IB
IC+IN
IC
IC
IB
IB+IN
IB
IC
IC+IN
IC
IA
IA+IN
IA
IA
IA+IN
IA
IC
IC+IN
IC
IB
IB+IN
IB
IC
IC
IC+IN
IB
IB
IB+IN
IC
IC
IC+IN
IB
IB
IB+IN
IA
IA
IA+IN
IA
IA
IA+IN
16
3.2.1
Controlo do Conversor Matricial
Os dois métodos actualmente usados para a modulação do conversor matricial clássico são:
modulação PWM Venturini [Alesina et al, 1989] e a modulação com vectores espaciais (Space Vector
Modulation - SVM). Em ambos os casos o processo de modulação está habitualmente associado a
compensadores lineares do tipo PI.
No caso do conversor matricial clássico de quatro braços o processo de modulação está
ainda em fase de estudo podendo contudo também ser realizado através de modulação com vectores
espaciais (Space Vector Modulation - SVM).
Nesta dissertação optou-se pela modulação com vectores espaciais pois permite um controlo
robusto do sistema, associado a uma rápida resposta.
3.2.2
Modulação com Vectores Espaciais
No caso do conversor matricial clássico a modulação com vectores espaciais requer a
representação dos estados possíveis num referencial ortogonal
, obtêm-se as componentes
das correntes
, isto é, em vez das componentes
. Contudo, como a componente 0 é igual ao somatório
a componente 0 acaba por ser desprezada.
Para o conversor matricial de quatro braços a soma das 3 correntes pode ser diferente de
zero caso o sistema não se encontre equilibrado, logo a componente 0 não pode ser desprezada.
Assim, para obter os vectores de tensão em coordenadas
é necessário aplicar a transposta da
transformação de Concordia (3.5) às tensões simples
√
√
[√
[
]
(3.6).
√
√
]
√
[
]
Aplicando esta transformação a todas as combinações possíveis de ligação dos interruptores
do conversor matricial de quatro braços representadas na tabela 1, obtêm-se os vectores
representados na tabela 2.
17
É possível verificar, através de (3.6), que as componentes
instante do valor das tensões simples
compostas
vão depender em cada
que por sua vez, dependem das tensões
, logo, os vectores resultantes vão depender em cada instante da localização
das tensões de entrada. Assim, como a representação das componentes
, é apresentada
em função das tensões compostas, é necessário dividir um período, das tensões compostas e das
suas simétricas em intervalos de tempo (12 zonas de tensão) definidos por pontos onde existam
mudanças importantes dos seus valores (Figura 3.2)
Figura 3.2 - Zonas de tensão
A divisão das tensões compostas e suas simétricas em 12 zonas irá permitir quantificar em
cada instante as componentes
de cada vector sendo esta quantificação que permitirá efectuar o
controlo das correntes de saída do conversor matricial.
18
Estado
Tabela 2 - Estados dos interruptores com componentes αβ0
VAN
VBN
VCN
Ia
Ib
Ic
Vα
Vβ
V0
Iα
Iβ
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
0
0
0
VAB
-VAB
VBC
-VBC
VCA
-VCA
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
VAB
-VAB
VBC
-VBC
VCA
-VCA
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
VAB
-VAB
VBC
-VBC
VCA
-VCA
0
0
0
IA
-IA
0
0
-IA
IA
IB
-IB
0
0
-IB
IB
IC
-IC
0
0
-IC
IC
0
0
0
-IA
IA
IA
-IA
0
0
-IB
IB
IB
-IB
0
0
-IC
IC
IC
-IC
0
0
0
0
0
0
0
-IA
IA
IA
-IA
0
0
-IB
IB
IB
-IB
0
0
-IC
IC
IC
-IC
0
0
0
√2/3 VAB
-√2/3 VAB
√2/3 VBC
-√2/3 VBC
√2/3 VCA
-√2/3 VCA
-√6/6 VAB
√6/6 VAB
-√6/6 VBC
√6/6 VBC
-√6/6 VCA
√6/6 VCA
-√6/6 VAB
√6/6 VAB
-√6/6 VBC
√6/6 VBC
-√6/6 VCA
√6/6 VCA
0
0
0
0
0
0
0
0
0
√2/2 VAB
-√2/2 VAB
√2/2 VBC
-√2/2 VBC
√2/2 VCA
-√2/2 VCA
-√2/2 VAB
√2/2 VAB
-√2/2 VBC
√2/2 VBC
-√2/2 VCA
√2/2 VCA
0
0
0
1/√3 VAB
-1/√3 VAB
1/√3 VBC
-1/√3 VBC
1/√3 VCA
-1/√3 VCA
1/√3 VAB
-1/√3 VAB
1/√3 VBC
-1/√3 VBC
1/√3 VCA
-1/√3 VCA
1/√3 VAB
-1/√3 VAB
1/√3 VBC
-1/√3 VBC
1/√3 VCA
-1/√3 VCA
0
0
0
√6/2 IA
-√6/2 IA
0
0
-√6/2 IA
√6/2 IA
√6/2 IB
-√6/2 IB
0
0
-√6/2 IB
√6/2 IB
√6/2 IC
-√6/2 IC
0
0
-√6/2 IC
√6/2 IC
0
0
0
-√2/2 IA
√2/2 IA
√2 IA
-√2 IA
-√2/2 IA
√2/2 IA
-√2/2 IB
√2/2 IB
√2 IB
-√2 IB
-√2/2 IB
√2/2 IB
-√2/2 IC
√2/2 IC
√2 IC
-√2 IC
-√2/2 IC
√2/2 IC
19
Estado
VAN
VBN
VCN
Ia
Ib
Ic
Vα
Vβ
V0
Iα
Iβ
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
VAB
-VAB
VBC
-VBC
VCA
-VCA
0
0
0
0
0
0
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
0
0
0
0
0
0
VAB
-VAB
VBC
-VBC
VCA
-VCA
0
0
0
0
0
0
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
IA+IB
IC+IN
0
0
IC+IN
IA+IB
IB+IC
IA+IN
0
0
IA+IN
IB+IC
IA+IC
IB+IN
0
0
IB+IN
IA+IC
-IN
IN
0
0
IN
-IN
IC+IN
IA+IB
IA+IB
IC+IN
0
0
IA+IN
IB+IC
IB+IC
IA+IN
0
0
IB+IN
IA+IC
IA+IC
IB+IN
0
0
IN
-IN
-IN
IN
0
0
0
0
IC+IN
IA+IB
IA+IB
IC+IN
0
0
IA+IN
IB+IC
IB+IC
IA+IN
0
0
IB+IN
IA+IC
IA+IC
IB+IN
0
0
IN
-IN
-IN
IN
√6/6 VAB
-√6/6 VAB
√6/6 VBC
-√6/6 VBC
√6/6 VCA
-√6/6 VCA
-√2/3 VAB
√2/3 VAB
-√2/3 VBC
√2/3 VBC
-√2/3 VCA
√2/3 VCA
√6/6 VAB
-√6/6 VAB
√6/6 VBC
-√6/6 VBC
√6/6 VCA
-√6/6 VCA
0
0
0
0
0
0
√2/2 VAB
-√2/2 VAB
√2/2 VBC
-√2/2 VBC
√2/2 VCA
-√2/2 VCA
0
0
0
0
0
0
-√2/2 VAB
√2/2 VAB
-√2/2 VBC
√2/2 VBC
-√2/2 VCA
√2/2 VCA
0
0
0
0
0
0
2/√3 VAB
-2/√3 VAB
2/√3 VBC
-2/√3 VBC
2/√3 VCA
-2/√3 VCA
2/√3 VAB
-2/√3 VAB
2/√3 VBC
-2/√3 VBC
2/√3 VCA
-2/√3 VCA
2/√3 VAB
-2/√3 VAB
2/√3 VBC
-2/√3 VBC
2/√3 VCA
-2/√3 VCA
3/√3 VAB
-3/√3 VAB
3/√3 VBC
-3/√3 VBC
3/√3 VCA
-3/√3 VCA
√2 (IA+IB)
-√2 (IA+IB)
√2 (IA+IB)
-√2 (IA+IB)
√2 (IA+IB)
-√2 (IA+IB)
√2 (IB+IC)
-√2 (IB+IC)
√2 (IB+IC)
-√2 (IB+IC)
√2 (IB+IC)
-√2 (IB+IC)
√2 (IA+IC)
-√2 (IA+IC)
√2 (IA+IC)
-√2 (IA+IC)
√2 (IA+IC)
-√2 (IA+IC)
√2 IN
-√2 IN
√2 IN
-√2 IN
√2 IN
-√2 IN
-π/6
-π/6
π/2
-π/2
π/6
π/6
-π/6
-π/6
π/2
-π/2
π/6
π/6
-π/6
-π/6
π/2
-π/2
π/6
π/6
-π/6
-π/6
π/2
-π/2
π/6
π/6
20
Estado
VAN
VBN
VCN
Ia
Ib
Ic
Vα
Vβ
V0
Iα
Iβ
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
-VBC
VCA
-VCA
VAB
-VAB
VBC
VAB
-VAB
VBC
-VBC
VCA
-VCA
-VBC
VCA
-VCA
VAB
-VAB
VBC
IA+IB
IN
IC
IC
IN
IA+IB
IA+IC
IN
IB
IB
IN
IA+IC
IA
IN
IB+IC
IB+IC
IN
IA
IN
IA+IB
IA+IB
IN
IC
IC
IN
IA+IC
IA+IC
IN
IB
IB
IN
IA
IA
IN
IB+IC
IB+IC
IC
IC
IN
IA+IB
IA+IB
IN
IB
IB
IN
IA+IC
IA+IC
IN
IB+IC
IB+IC
IN
IA
IA
IN
-√6/6 VCA
√6/6 VBC
-√6/6 VAB
√6/6 VCA
-√6/6 VBC
√6/6 VAB
-√6/6 VCA
√6/6 VBC
-√6/6 VAB
√6/6 VCA
-√6/6 VBC
√6/6 VAB
-√2/3 VCA
√2/3 VBC
-√2/3 VAB
√2/3 VCA
-√2/3 VBC
√2/3 VAB
-√2/2 VCA
√2/2 VBC
-√2/2 VAB
√2/2 VCA
-√2/2 VBC
√2/2 VAB
√2/2 VCA
-√2/2 VBC
√2/2 VAB
-√2/2VCA
√2/2 VBC
-√2/2 VAB
0
0
0
0
0
0
1/√3 (2VAB-VBC)
1/√3 (-2VAB-VCA)
1/√3 (-2VBC-VCA)
1/√3 (-2VBC-VAB)
1/√3 (2VCA-VAB)
1/√3 (2VAB-VBC)
1/√3 (2VAB-VBC)
1/√3 (2VAB-VCA)
1/√3 (2VBC-VCA)
1/√3 (-2VBC-VAB)
1/√3 (2VCA-VAB)
1/√3 (-2VCA+VBC)
1/√3 (-2VBC-VAB)
1/√3 (2VCA-VAB)
1/√3 (-2VCA+VBC)
1/√3 (2VAB-VBC)
1/√3 (-2VAB+VCA)
1/√3 (2VBC-VCA)
√2 √(IC^2 +ICIN + IN^2)
√2 √(IC^2 +ICIN + IN^2)
√2 √(IC^2 +ICIN + IN^2)
√2 √(IC^2 +ICIN + IN^2)
√2 √(IC^2 +ICIN + IN^2)
√2 √(IC^2 +ICIN + IN^2)
√2 √(IB^2 +IBIN + IN^2)
√2 √(IB^2 +IBIN + IN^2)
√2 √(IB^2 +IBIN + IN^2)
√2 √(IB^2 +IBIN + IN^2)
√2 √(IB^2 +IBIN + IN^2)
√2 √(IB^2 +IBIN + IN^2)
√2 √(IA^2 +IAIN + IN^2)
√2 √(IA^2 +IAIN + IN^2)
√2 √(IA^2 +IAIN + IN^2)
√2 √(IA^2 +IAIN + IN^2)
√2 √(IA^2 +IAIN + IN^2)
√2 √(IA^2 +IAIN + IN^2)
arctg( -1/√3 (IN-IC)/(IC+IN))
arctg( -1/√3 (2IC+IN)/IN )
arctg( -1/√3 (2IN+IC)/IC )
arctg( 1/√3 (2IN+IC)/IC )
arctg( 1/√3 (2IC+IN)/IN )
arctg( -1/√3 (IC-IN)/(IC+IN))
arctg( -1/√3 (IN-IB)/(IB+IN))
arctg( -1/√3 (2IB+IN)/IN )
arctg( -1/√3 (2IN+IB)/IB )
arctg( 1/√3 (2IN+IB)/IB )
arctg( 1/√3 (2IB+IN)/IN )
arctg( -1/√3 (IB-IN)/(IB+IN))
arctg( 1/√3 (2IN+IA)/IA )
arctg( 1/√3 (2IA+IN)/IN )
arctg( -1/√3 (IA-IN)/(IA+IN))
arctg( -1/√3 (IN-IA)/(IA+IN))
arctg( -1/√3 (2IA+IN)/IN )
arctg( -1/√3 (2IN+IA)/IA )
21
Estado
VAN
VBN
VCN
Ia
Ib
Ic
Vα
Vβ
V0
Iα
Iβ
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
0
VAB
-VCA
0
VAB
-VCA
-VAB
0
VBC
-VAB
0
VBC
VCA
-VBC
0
VCA
-VBC
0
-VAB
0
VBC
VCA
-VBC
0
0
VAB
-VCA
VCA
-VBC
0
0
VAB
-VCA
-VAB
0
VBC
VCA
-VBC
0
-VAB
0
VBC
VCA
-VBC
0
0
VAB
-VCA
-VAB
0
VBC
0
VAB
-VCA
IA+IN
IA
IA
IA+IN
IA
IA
IB+IN
IB
IB
IC+IN
IC
IC
IB+IN
IB
IB
IC+IN
IC
IC
IB
IB+IN
IB
IC
IC+IN
IC
IA
IA+IN
IA
IA
IA+IN
IA
IC
IC+IN
IC
IB
IB+IN
IB
IC
IC
IC+IN
IB
IB
IB+IN
IC
IC
IC+IN
IB
IB
IB+IN
IA
IA
IA+IN
IA
IA
IA+IN
-√6/2 VA
√2/3 (VAB+1/2*VBC)
√2/3 (-VCA-1/2*VBC)
√6/2 VA
√2/3 (VAB+1/2*VBC)
√2/3 (-VCA-1/2*VBC)
√2/3 (-VAB-1/2*VCA)
√6/2 VB
√2/3 (VBC+1/2*VCA)
√2/3 (-VAB-1/2*VCA)
-√6/2 VB
√2/3 (VBC+1/2*VCA)
√2/3 (VCA+1/2*VAB)
√2/3 (-VBC-1/2*VAB)
-√6/2 VC
√2/3 (VCA+1/2*VAB)
√2/3 (-VBC-1/2*VAB)
√6/2 VC
√2/2 VBC
√2/2 VBC
√2/2 VBC
-√2/2 VBC
-√2/2 VBC
-√2/2 VBC
-√2/2 VCA
-√2/2 VCA
-√2/2 VCA
√2/2 VCA
√2/2 VCA
√2/2 VCA
√2/2 VAB
√2/2 VAB
√2/2 VAB
-√2/2 VAB
-√2/2 VAB
-√2/2 VAB
-3/√3 VA
-3/√3 VB
-3/√3 VC
-3/√3 VA
-3/√3 VB
-3/√3 VC
-3/√3 VA
-3/√3 VB
-3/√3 VC
-3/√3 VA
-3/√3 VB
-3/√3 VC
-3/√3 VA
-3/√3 VB
-3/√3 VC
-3/√3 VA
-3/√3 VB
-3/√3 VC
√2 √(IB^2 +IBIC + IC^2)
√2 √(IA^2 +IAIC + IC^2)
√2 √(IA^2 +IAIB + IB^2)
√2 √(IB^2 +IBIC + IC^2)
√2 √(IA^2 +IAIB + IB^2)
√2 √(IA^2 +IAIC + IC^2)
√2 √(IA^2 +IAIC + IC^2)
√2 √(IB^2 +IBIC + IC^2)
√2 √(IA^2 +IAIB + IB^2)
√2 √(IA^2 +IAIB + IB^2)
√2 √(IB^2 +IBIC + IC^2)
√2 √(IA^2 +IAIC + IC^2)
√2 √(IA^2 +IAIC + IC^2)
√2 √(IA^2 +IAIB + IB^2)
√2 √(IB^2 +IBIC + IC^2)
√2 √(IA^2 +IAIB + IB^2)
√2 √(IA^2 +IAIC + IC^2)
√2 √(IB^2 +IBIC + IC^2)
arctg( -1/√3 (IB-IC)/(IB+IC))
arctg( -1/√3 (2IC+IA)/(IA )
arctg( 1/√3 (2IB+IA)/IA )
arctg( -1/√3 (IC-IB)/(IB+IC))
arctg( -1/√3 (2IB+IA)/IA )
arctg( 1/√3 (2IC+IA)/(IA )
arctg( -1/√3 (IA-IC)/(IA+IC))
arctg( -1/√3 (2IC+IB)/(IB )
arctg( 1/√3 (2IA+IB)/IB )
arctg( -1/√3 (IA-IB)/(IA+IB))
arctg( -1/√3 (2IB+IC)/IC )
arctg( 1/√3 (2IA+IC)/(IC )
arctg( -1/√3 (IC-IA)/(IA+IC))
arctg( -1/√3 (2IA+IB)/IB )
arctg( 1/√3 (2IC+IB)/(IB )
arctg( -1/√3 (IB-IA)/(IB+IA))
arctg( -1/√3 (2IA+IC)/(IC )
arctg( 1/√3 (2IB+IC)/IC )
22
3.3 Dimensionamento dos semicondutores do conversor
Para efectuar uma correcta escolha dos semicondutores a usar no conversor é necessário
determinar o valor máximo de tensão que estes terão de suportar aos seus terminais assim como as
correntes, máximas, médias e eficazes, que os percorrem.
3.3.1
Tensão máxima a suportar
A tensão máxima que os semicondutores têm de suportar aos seus terminais, tensão colector
emissor
, é dada, em condições normais de funcionamento, pelo valor de pico da tensão
composta (3.7)
√
√
Contudo no dimensionamento dos semicondutores é necessário considerar uma margem de
segurança face à tensão composta, situando-se essa margem de segurança entre os
Deste modo, a tensão máxima dos semicondutores a seleccionar deve situar-se na gama
(3.8)
3.3.2
Corrente máxima a suportar
A corrente máxima que percorre os semicondutores é imposta pelo valor máximo que é
possível observar à saída do semicondutor em condições normais de funcionamento [Silva, J, 2008].
Este valor é obtido tendo em conta o valor da corrente nominal afectada pela relação de
transformação do transformador série (3.9)
Assim, o valor máximo de corrente a suportar pelos semicondutores é (3.10)
√
De modo a poder-se realizar o cálculo do valor eficaz da corrente em cada semicondutor de
cada braço do conversor matricial considerou-se uma distribuição uniforme da corrente por cada um
dos três semicondutores de cada braço obtendo-se assim o valor eficaz que cada um deles tem de
suportar (2.14) (3.11)
23
√
Tal como para a tensão máxima aos terminais de cada semicondutor, também no caso da
corrente eficaz é necessário considerar uma margem de segurança que se encontra entre os
face ao valor calculado. Assim os valores de corrente a que os semicondutores
estão sujeitos são os apresentados na tabela 3.
Tabela 3 - Resumo das correntes a suportar por cada semicondutor
3.4 Dimensionamento dos elementos de filtragem
A realização directa da conversão AC-AC ocorre com uma frequência de comutação muito
elevada, na ordem dos
, pelo que são necessários elementos de filtragem de modo a assegurar a
qualidade da energia tanto no lado da baixa tensão como do lado da média tensão. Por isso, é
necessário considerar o dimensionamento de um filtro de alta frequência de entrada e um filtro de
saída.
3.4.1
Dimensionamento do Filtro de Entrada do Conversor Matricial
O conversor matricial está ligado em paralelo com a linha de baixa tensão logo a seguir ao
transformador de distribuição. Este facto faz com que a corrente na linha de média tensão seja
proporcional à soma das correntes da linha de baixa tensão com as correntes de entrada do
conversor. No entanto, como as correntes à entrada do conversor matricial são correntes comutadas
obtidas a partir das suas correntes de saída, é necessário utilizar um filtro LC para fazer a interligação
do conversor matricial à linha de baixa tensão.
O filtro implementado é LC de segunda ordem com resistência de amortecimento sendo esta
tipologia que em geral apresenta o menor valor de perdas [Pinto, S. F.,2006], e, a resistência de
amortecimento, tem como objectivo, diminuir as oscilações provocadas pela comutação dos
semicondutores evitando também que o sistema perca a sua estabilidade.
De modo a facilitar o cálculo dos parâmetros do filtro o mesmo foi feito tendo por base o
equivalente monofásico do filtro (Figura 3.3), tendo em conta que no final o valor obtido para os
condensadores terá de ser dividido por três, uma vez que estes se encontram ligados em triângulo.
24
Figura 3.3 - Equivalente monofásico do filtro de entrada
Através da tensão máxima e corrente mínima para o qual o filtro tem de funcionar é possível
calcular o valor do condensador [Silva, J.F., 2012].
(
( ))
De modo a efectuar o correcto dimensionamento da bobina considera-se que a frequência de
corte do filtro de entrada deve encontrar-se uma década acima da frequência da rede para que
minimize as componentes não fundamentais da corrente [Pinto, S. F.,2001].
A resistência de amortecimento é obtida por:
√
Obtiveram-se os seguintes valores para os parâmetros do filtro de entrada
245
542
0,5148
Tabela 4 - Parâmetros do filtro de entrada
25
3.4.2
Dimensionamento do filtro de saída do Conversor Matricial
À saída do conversor matricial é necessário filtrar as harmónicas de alta frequência existentes
na corrente de saída do conversor e da tensão da rede de baixa tensão para que deste modo seja
assegurada a qualidade da energia através da diminuição da distorção harmónica das grandezas
filtradas. Para tal utilizou-se um filtro passa-baixo cujo esquema monofásico se representa em
seguida. (Figura 3.4)
Figura 3.4 - Equivalente monofásico do filtro de saída
Para o dimensionamento da bobina é necessário saber qual o valor da corrente nominal
(3.16), definir o valor pretendido para o tremor da corrente à saída do conversor
sendo
também necessário considerar o valor da frequência de comutação dos semicondutores. Como no
caso do conversor usado nesta dissertação os semicondutores não têm frequência de comutação fixa
pois esta depende do erro da corrente lida face à corrente de referência estimou-se a frequência de
comutação,
, em
.
√
Feita a caracterização do sistema é possível obter os valores tanto da bobina como do
condensador, sendo que no caso do condensador é necessário considerar também a frequência de
corte que tal como para o filtro de entrada se deve encontrar uma década acima da frequência da
rede [Pinto, S. F.,2001].
√
Obtiveram-se os seguintes valores para os parâmetros
29
888
Tabela 5 - Parâmetros do filtro de saída
26
4 Controlo do Sistema
4.1 Controlo das correntes de saída
Para efectuar o controlo das correntes de saída do conversor utilizou-se um controlo não
linear por modo de deslizamento [Pinto S., 2003] com base na representação vectorial dos vários
estados do conversor.
Este tipo de controlo apresenta uma grande robustez face a variações de parâmetros e de
condições de operação [Silva, J.F., 2011] permitindo ainda, reduzir a ordem do sistema com o
objectivo de levar o sistema a seguir as referências impostas através da comutação dos
semicondutores.
Para que tal seja possível é necessário caracterizar o sistema, considerando-se à saída do
conversor um filtro indutivo (Figura 4.1).
Figura 4.1 - Saída do conversor matricial
Assim a saída do conversor AC/AC pode ser descrita pelo seguinte conjunto de equações
(4.1)
{
Aplicando a transformação de Concordia podem rescrever-se as equações (4.1) do seguinte
modo (4.2)
{
27
Analisando (4.2) é possível verificar que as derivadas das correntes vão depender das
correntes
e das tensões
. Como se pretende controlar as correntes
necessário operar os interruptores de modo a obter-se vectores com componentes
será
que
controlem as correntes de saída do conversor do modo desejado.
Assim, é também necessário efectuar um controlo de corrente de saída em cadeia fechada,
no qual as correntes medidas à saída do conversor são comparadas com os valores de referência.
De acordo com o erro calculado (4.3), que é a diferença entre as correntes de referência e as
correntes medidas no conversor, é possível saber qual o valor que tem de assumir a componente
de modo a minimizar o erro. Assim, recorrendo a (4.2) escolhe-se o vector que possua as
componentes
que minimizem o erro da corrente de saída.
{
Seria desejável que a função de erro fosse nula, mas para que isso acontecesse seria
necessário que os semicondutores comutassem a uma frequência infinita. Como isso não se verifica,
as correntes de saída do conversor não seguirão exactamente a referência.
Para que seja possível medir o erro é utilizada uma janela de erro (Figura 4.2) que está
associada à utilização de três comparados histeréticos de três níveis, um para cada componente
, que irão indicar qual o erro de cada componente para que deste modo seja feita a escolha,
entre os 81 vectores disponíveis, aquele que apresente componentes
, que levem à
minimização do seu erro.
Figura 4.2 - Janela de erro
Com a utilização de comparadores histeréticos de três níveis consegue-se obter três níveis
lógicos
, que apesar de não permitir quantificar o erro da corrente, permite saber se o
valor da corrente medida é superior, inferior ou aproximadamente igual ao valor de referência.
Para assegurar que o sistema se encontre em modo de deslizamento é necessário garantir a
condição de estabilidade (4.4) [Pinto S., 2003].
28
Analisando as equações (4.2) e (4.3) é possível seleccionar o vector que irá garantir a
minimização do erro da corrente de saída, havendo 3 situações possíveis:
Caso
aumentar
indica que
o que implica que para diminuir o erro é necessário
o que leva à necessidade de seleccionar um vector com componente
Caso
indica que
o que implica tentar manter o erro é logo necessário
seleccionar um vector com componente
Caso
diminuir
indica que
.
.
o que implica que para diminuir o erro é necessário
o que leva à necessidade de seleccionar um vector com componente
O mesmo raciocínio aplica-se para as componentes
.
A convenção de atribuição dos estados lógicos é a seguinte:
Tendo em conta o valor assumido pelo erro de cada componente obtiveram-se as diferentes
combinações possíveis para o erro da corrente de saída do conversor.
Cruzando a informação das diferentes combinações dos erros da corrente de saída com a
zona de tensão em que essas combinações podem ocorrer foi possível proceder à escolha dos
vectores que ao serem aplicados apresentem componente
, tal que o erro da corrente de
saída seja minimizado.
É de máxima importância saber em que zona da tensão de entrada o erro está a ocorrer para
poder efectuar a escolha correcta do vector a usar em cada instante, pois como as suas
componentes
dependem fortemente das tensões compostas o vector escolhido terá sempre
de depender das tensões máximas e mínimas dessa zona para que deste modo tenham um maior
efeito no erro da corrente.
Considerando a zona 11, que é caracterizada pelas tensões compostas VAB e –VBC, como
exemplo e as funções de erro
é necessário entrar na tabela 2 os vectores
que para o caso da tensão composta VAB tenha componente
maior que zero e componente
menor que zero, no que diz respeito a tensão composta –VBC é necessário que a componente
menor que zero e componente
seja
seja maior que zero. É possível concluir que para esta
combinação das funções de erro os vectores 11 e 12 permitem o controlo da corrente de saída do
conversor.
29
A tabela 6 apresenta os vectores que melhor minimizam o erro tendo em consideração o valor
do erro da corrente e a zona de tensão em cada instante.
Sα
Sβ
S0
Zona 1 e 12
Zona 2 e 3
Zona 4 e 5
Zona 6 e 7
Zona 8 e 9
Zona 10 e 11
-1
-1
-1
23
26
25
26
22
25
27
22
24
27
23
24
-1
-1
0
48
49
50
49
51
50
46
51
47
46
48
47
-1
-1
1
16
21
18
21
17
18
20
17
19
20
16
19
-1
0
-1
5
8
7
8
4
7
9
4
6
9
5
6
-1
0
0
60
61
62
61
63
62
58
63
59
58
60
59
-1
0
1
28
33
30
33
29
30
32
29
31
32
28
31
-1
1
-1
35
38
37
38
34
37
39
34
36
39
35
36
-1
1
0
54
55
56
55
57
56
52
57
53
52
54
53
-1
1
1
10
15
12
15
11
12
14
11
13
14
10
13
0
-1
-1
79
73
68
73
77
68
71
77
66
71
79
66
0
-1
0
81
74
67
74
78
67
72
78
64
72
81
64
0
-1
1
80
75
69
75
76
69
70
76
65
70
80
65
0
0
-1
41
44
43
44
40
43
45
40
42
45
41
42
0
0
0
1
2
3
1
2
3
1
2
3
1
2
3
0
0
1
40
45
42
45
41
42
44
41
43
44
40
43
0
1
-1
76
70
65
70
80
65
74
80
69
75
76
69
0
1
0
78
71
64
71
81
64
75
81
67
74
78
67
0
1
1
77
72
66
72
79
66
73
79
68
73
77
68
1
-1
-1
11
14
13
14
10
13
15
10
12
15
11
12
1
-1
0
57
52
53
52
54
53
55
54
56
55
57
56
1
-1
1
34
39
36
39
35
36
38
35
37
38
34
37
1
0
-1
29
32
31
32
28
31
33
28
30
33
29
30
1
0
0
63
58
59
58
60
59
61
60
62
61
63
62
1
0
1
4
9
6
9
5
6
8
5
7
8
4
7
1
1
-1
17
20
19
20
16
19
21
16
18
21
17
18
1
1
0
51
46
47
46
48
47
49
48
50
49
51
50
1
1
1
22
27
24
27
23
24
26
23
25
26
22
25
Tabela 6 - Selecção do vector para controlo da corrente
A utilização de comparadores de histerese de três níveis permite que, para cada combinação
de erro e zona de tensão existam sempre no mínimo dois vectores para realizar o controlo das
correntes. É a existência deste grau de liberdade que irá permitir o controlo das correntes de entrada.
30
4.2 Controlo do factor de potência à entrada do conversor.
Do ponto de vista da rede de baixa tensão o conversor deve ser visto como uma carga
puramente resistiva, sendo para isso necessário controlar o factor de potência à entrada do conversor
de modo a que este assuma um valor quase unitário. Considerando apenas a componente
fundamental, as tensões simples e as respectivas correntes deverão estar em fase ou oposição de
fase, caso o conversor esteja a absorver ou a injectar energia na rede.
Para que as tensões simples e as correntes estejam em fase é necessário que
.
Considerando este facto e analisando o circuito de entrada do conversor (Figura 4.3) tem-se (4.5)
Figura 4.3 - Alimentação do conversor matricial
{
{
Com base em (4.5) conclui-se que para obter o factor de potência unitário, a potência reactiva
absorvida pelo conversor tem de ser nula.
O controlo do factor de potência do conversor é realizado recorrendo à transformação de
Blondel-Park (4.6)
[
]
Considerando as tensões de entrada em coordenadas em
transformação de Blondel-Park (nas coordenadas
coordenadas
(4.6) e aplicando a
) obtêm-se as tensões de entrada em
(4.7)
√
√
{
√
31
√
{
{
√
No caso das correntes de entrada do conversor o neutro não está acessível pelo que a soma
das três correntes
é igual a zero não havendo assim componente homopolar, dai o facto da
componente 0 ser zero à entrada do conversor matricial.
Em coordenadas
a potência activa e reactiva são dadas por (4.9) [Akagi et al, 2007].
{
Sincronizando as tensões
de (4.8) com a tensão simples de entrada
{
obtêm-se (4.10).
√
Analisando (4.9) e (4.10) no referencial escolhido é possível concluir que a potência reactiva
dependerá apenas da componente
da corrente de entrada (4.11).
Conclui-se desta forma que para obter um factor de potência unitário é necessário que a
componente
da corrente de entrada,
, seja nula.
O controlo do factor de potência tem um grau de prioridade inferior ao controlo da corrente e
saída do conversor, o que implica que este seja feito a partir das duas opções existentes para
controlar a corrente de saída.
Assim para efectuar o controlo da componente
, à semelhança do controlo das correntes de
saída, optou-se por estabelecer um erro de seguimento da componente
em relação à sua referência
(4.12), que neste caso será nula. Contudo como neste caso apenas se têm dois vectores disponíveis
para escolha, é usado um comparador de histerese de dois níveis
.
Tal como no controlo das correntes de saída, para que o sistema se encontre em modo de
deslizamento é necessário garantir a condição de estabilidade (4.13) [Pinto S., 2003].
32
Assim analisando (4.12):
Caso
então,
, assim de forma a diminuir o erro é necessário aumentar a
componente
.
Caso
então,
componente
.
, assim de forma a diminuir o erro é necessário diminuir a
A convenção de atribuição dos estados lógicos é a seguinte:
Após a caracterização do erro da componente
é necessário proceder à escolha do vector
que melhor o controle. Para tal, seria necessário localizar os eixos
referencial
apresenta um movimento rotacional sobre o plano
no plano
, contudo o
dependendo a sua localização da
tensão de entrada. Caso não fossem usados vectores girantes seria possível definir regiões em
função da tensão de entrada nas quais os eixos
deslizariam. Contudo, nesta dissertação optou-se
por usar todos os vectores disponíveis.
Com base nas correntes que servem de referência para o controlo da corrente de saída é
calculada a componente
de cada vector naquele instante. Assim, quando são escolhidos os dois
vectores que permitem o controlo da corrente de saída do conversor sabe-se também qual o valor da
componente
de cada um. Cruzando esta informação com o erro da componente
entrada é possível seleccionar qual dos vectores terá a componente
da corrente de
que melhor controla o factor
de potência à entrada do conversor.
Ocorre por vezes que, quando se analisa a componente
controlo da corrente de saída nenhum deles apresente componente
lógico do erro de
dos vectores disponíveis para o
com o mesmo sinal do estado
, estas situações ocorrem quando os dois vectores disponíveis não apresentam
simetria. Nestas situações opta-se pelo vector que apresente em módulo o valor mais próximo de
zero. Esta situação introduz um erro na corrente de entrada do conversor que por sua vez irá afectar
o factor de potência, contudo devido a elevada frequência de comutação a duração destas situações
é reduzida permitindo mesmo assim um controlo eficaz.
O controlo do factor de potência apenas assume um factor prioritário em relação ao controlo da
corrente de saída do conversor na situação em que o seu erro é zero nas três componentes, isto é,
quando
. Visto que à saída o erro é próximo de zero a aplicação de um vector não ideal não
irá prejudicar significativamente a forma de onda das correntes de saída. Assim, tendo em conta que
já se realizou o cálculo da componente
de todos os vectores escolhe-se aquele cuja componente
melhor permita contrariar o erro da corrente.
33
4.3 Controlo da tensão na rede de baixa tensão
A tensão na rede de baixa tensão, ou seja, no centro de consumo, deve cumprir a norma [NP
EN 50160, 2010], o que implica que o seu valor eficaz seja
. Deste modo o controlo de
tensão deve ser capaz de manter a tensão dentro destes limites independentemente das condições
de carga da rede.
Com o objectivo de efectuar este controlo é colocado um condensador
em paralelo com o
centro de consumo através do qual se vai realizar a regulação da tensão. Ao manter a tensão de
o
regulador irá garantir também que a tensão no centro de consumo se encontra dentro dos valores
permitidos pela norma.
O sistema conversor matricial, condensador e centro de consumo podem ser representados
pelo modelo abaixo (Figura 4.4).
Figura 4.4 - Modelo de dimensionamento do controlo de tensão
O sistema pode ser assim representado pois como a corrente à saída do conversor matricial
se encontra controlada este pode ser considerado como uma fonte de corrente,
se ainda que a corrente de carga é uma perturbação do sistema,
, considerando-
.
De modo a efectuar o controlo das tensões aos terminais do condensador, estas são medidas
e são comparadas com os valores de referência em coordenadas
, tendo em atenção que como
se pretende o equilíbrio das tensões na rede de baixa tensão a referência na coordenada
é igual a
zero para que não exista componente homopolar e assim o sistema se encontre em equilíbrio. Após
se obter o erro da tensão lida face à tensão de referência é utilizado um controlador PI que irá
fornecer o valor referência para a corrente de saída do conversor matricial.
Para se dimensionar o regulador PI é necessário representar o diagrama de blocos do
sistema através de funções de transferência.
No condensador, a função de transferência é dada por (4.14)
Sendo a corrente no condensador dada por
34
É também necessário considerar o modelo linearizado do conversor, cuja função de
transferência pode ser descrita por
⁄
função de transferência dada por
[Pinto S., 2006]. O regulador escolhido é do tipo PI, sendo a
.
O sistema pode então ser representado pelo seguinte diagrama de blocos (Figura 4.5)
Figura 4.5 - Diagrama de blocos do controlo de tensão
Analisando o diagrama de blocos obtêm-se a função de transferência em cadeia fechada, da
tensão da rede em relação à corrente na carga [Pinto S., 2003] [Silva, J.F., 2012].
((
)(
⁄
)(
)
)
Reescrevendo na forma canónica obtém:
⁄
⁄
O denominador da função de transferência pode ser expresso através de um polinómio de
terceira ordem (4.18)
Igualando os termos em s do polinómio (4.17) ao denominador da função de transferência
(4.16) é possível obter os valores dos ganhos, proporcional e integral, do compensador PI (4.18)
{
Os valores obtidos para parâmetros do compensador PI encontram-se na tabela 4.6
35
Tabela 7 - Parâmetros do controlador PI
36
5. Resultados
Com o objectivo de testar o sistema proposto procedeu-se à simulação de diferentes cenários
de funcionamento da rede de distribuição recorrendo à ferramenta do Simulink no Matlab.
5.1 Variação das correntes nas 3 fases da carga
Para o teste do sistema nestas condições foram considerados os seguintes pressupostos:
Tipo de Carga
Potência da
Variação da
Duração da
Fase
Carga
Carga
perturbação
Desequilibrada
Resistiva
A,B,C
Na figura 5.1 observa-se a corrente à entrada da rede de distribuição de baixa tensão
Figura 5.1 - Correntes na rede BT obtidas quando ocorre variação das condições de carga
É possível verificar que no instante
a corrente à entrada da rede de distribuição
sofre um aumento do seu valor. Este facto deve-se à diminuição do valor das cargas em 20% fase ao
seu valor inicial. O facto da perturbação na carga ter ocorrido nas três fases, faz com a corrente de
neutro se mantenha quase nula tendo apenas o sistema de compensar a diminuição da carga através
do aumento da corrente de modo a manter a tensão dentro dos valores definidos pela norma. Esta
situação de diminuição do valor das cargas pode representar a injecção de corrente na rede por parte
de um microprodutor numa situação de vazio, fazendo com que a corrente na rede aumente.
37
Na figura 5.2 é possível analisar o comportamento da tensão na rede de BT.
Figura 5.2 - Tensões na rede BT obtidas quando ocorre variação das condições de carga
Verifica-se que no instante em que ocorre o defeito a forma de onda da tensão de saída sofre
uma pequena deformação. Contudo recupera rapidamente a sua forma sinusoidal e ainda mais
importante mantêm o valor da amplitude igual e dentro dos limites definidos pela norma NP EN 50
160, o que mostra o correcto funcionamento do sistema proposto e que valida a sua utilização num
PT que a montante tenha sistemas de microgeração.
A figura 5.3 mostra as correntes à entrada do transformador de distribuição verificando-se que
de facto das correntes comutadas provenientes do conversor matricial têm pouco efeito na
globalidade da forma de onda.
Figura 5.3 - Correntes na rede MT obtidas quando ocorre variação das condições de carga
38
Outra característica importante do sistema proposto é o facto de o factor de potência da rede
de média tensão ser muito próximo de um. Este facto é possível de confirmar através da figura 5.4
onde se consegue ver a tensão e a corrente à entrada do transformador distribuição praticamente em
fase mesmo após a perturbação.
Figura 5.4 - Tensão e corrente na rede MT obtidas quando ocorre variação das condições de carga
É possível verificar na figura 5.5 um ligeiro aumento da tensão no transformador série de
forma que o sistema consiga manter a tensão de saída dentro dos valores estabelecidos.
Figura 5.5 - Tensão no primário do transformador série obtidas quando ocorre variação das condições de carga
39
5.2 Desequilíbrio de uma das correntes de fase na rede de distribuição BT
Para o teste do sistema nestas condições foram considerados os seguintes pressupostos:
Tipo de Carga
Potência da
Variação da
Duração da
Fase
Carga
Carga
perturbação
Desequilibrada
Resistiva
A
A figura 5.6 reflecte a alteração na corrente na rede de baixa tensão aquando da ocorrência
da perturbação.
Figura 5.6 - Correntes na rede de BT obtidas quando ocorre um desequilíbrio numa das correntes de fase
No instante
a carga na fase A sofre um aumento de
passando o sistema a estar desequilibrado, isto é, a soma das três correntes
fase ao seu valor inicial
deixa de ser nula
em cada instante, dando origem a uma corrente de neutro não desprezável. Num sistema onde a
montagem proposta não esteja implementada esta alteração iria levar a que o desequilíbrio das
correntes na rede de baixa tensão afectasse também a tensão em cada fase da rede de baixa tensão.
Contudo, a montagem proposta consegue nesta situação garantir também que o valor das tensões
nas diferentes fases se mantém equilibrada.
40
Na figura 5.7 é possível verificar o equilíbrio das tensões na rede de baixa tensão, apesar das
correntes estarem equilibradas.
Figura 5.7 - Tensões na rede BT obtidas quando ocorre um desequilíbrio numa das correntes de fase
Na situação em que a perturbação na carga corresponde a
o sistema reage de
forma a que a mesma não tenha qualquer efeito na tensão de saída nem mesmo no instante em que
esta acontece.
É ainda possível verificar na figura 5.8 que o comportamento da corrente de entrada no
transformador de distribuição, tal como esperado, no momento em que ocorre a perturbação sofre
uma pequena diminuição no valor da amplitude, que é mais visível na fase em que, na carga, ocorre
a perturbação do que nas restantes. Contudo, assim que a perturbação termina, o controlo do
sistema permite que a corrente volte ao valor inicial sem que estas alterações afectem a forma
sinusoidal da corrente.
41
Figura 5.8 - Correntes na rede MT obtidas quando ocorre um desequilíbrio numa das correntes de fase
Outro factor importante para a qualidade de energia é o factor de potência do lado da média
tensão que se deve manter o mais próximo possível de um. Através da figura 5.9 é possível verificar
que a corrente e a tensão à entrada do transformador de distribuição, isto é, do lado da média tensão
se encontram praticamente em fase o que garante um o factor de potência próximo de um.
Figura 5.9 - Tensão e corrente na rede MT obtidas quando ocorre um desequilíbrio numa das correntes de fase
42
A figura 5.10 permite observar o comportamento da tensão no transformador série
Figura 5.10 - Tensão no primário do transformador série obtidas quando ocorre um desequilíbrio numa das
correntes de fase
Nesta situação verifica-se que a amplitude da tensão aos terminais do transformador série
diminui de modo a manter a tensão de saída dentro dos valores permitidos pela norma.
43
5.3 Desequilíbrio das correntes em duas fases da rede de distribuição BT
Para o teste do sistema nestas condições foram considerados os seguintes pressupostos:
Tipo de Carga
Potência da
Variação da
Duração da
Fase
Carga
Carga
perturbação
Desequilibrada
Resistiva
A, C
A figura 5.11 reflecte a alteração na corrente na rede de baixa tensão a quando da ocorrência
da perturbação.
Figura 5.11 – Correntes na rede BT obtidas quando ocorre um desequilíbrio em duas correntes de fase
A perturbação das cargas na fase A e C,
, faz com que no momento em que esta
perturbação ocorre a corrente nestas duas fases sofra uma diminuição significativa exigindo que o
sistema reaja de modo a que esta variação não se faça sentir na tensão de alimentação da rede.
Deste modo para garantir que a tensão de saída siga a referência é alterada o valor das correntes de
referência que permitem que a tensão as terminais da carga se mantenham estáveis.
44
Na figura 5.12 é possível verificar que a tensão de alimentação da rede de baixa tensão
mantém o valor definido mesmo após a ocorrência da perturbação
Figura 5.12 - Tensões na rede BT obtidas quando ocorre um desequilíbrio em duas correntes de fase
A montagem proposta garante mesmo nestas situações a qualidade da energia tanto do lado
da rede de baixa tensão, como é possível confirmar pelas figuras acima, como do lado da média
tensão pela forma sinusoidal das correntes como pelo facto de tanto a corrente como a tensão se
encontrarem em fase (Figura 5.13 e Figura 5.14).
Figura 5.13 - Correntes na rede MT obtidas quando ocorre um desequilíbrio em duas correntes de fase
45
Figura 5.14 - Tensão e corrente na rede MT obtidas quando ocorre um desequilíbrio em duas correntes de fase
5.4 Sobretensão na média tensão
Para o teste do sistema nestas condições foram considerados os seguintes
pressupostos:
Tipo de Carga
Resistiva
Tensão em MT
Variação da
Duração da
Fase
Tensão
perturbação
Desequilibrada
A, B, C
A figura 5.15 reflecte o instante em que ocorre a sobretensão na rede de média tensão.
Figura 5.15 - Tensão na rede MT obtidas quando ocorre sobretensão na rede MT
46
A ocorrência da sobretensão na rede de média tensão leva por sua vez à diminuição da corrente
no lado na média tensão que se pode observar na figura 5.16
Figura 5.16 - Corrente na rede MT obtidas quando ocorre sobretensão na rede MT
Contudo esta perturbação não afecta a qualidade da energia pois como se comprova na
figura 5.17 a desfasagem entre a tensão e a corrente na rede de média tensão é praticamente nula
garantindo assim factor de potência próximo de 1.
Figura 5.17 - Tensão e corrente na rede MT obtidas quando ocorre sobretensão na rede MT
47
A sobretensão que ocorre na média tensão é propagada para o lado da baixa tensão, contudo
através da figura 5.18 é possível verificar que está não tem efeito tanto na tensão aos terminais da
carga como na corrente na mesma, o que comprova o correcto funcionamento do regulador de
tensão em BT.
Figura 5.18 - Tensões e correntes na rede BT obtidas quando ocorre sobretensão na rede MT
É ainda possível verificar que de modo a controlar o sistema a tensão no primário do
transformador série sofre um aumento da sua amplitude e ainda mais relevante sofre uma mudança
de fase de modo a compensar a variação da tensão na linha de distribuição. Esta alteração na fase
da tensão no primário do transformador série deve-se ao facto de nestas situações o conversor estar
a absorver energia de modo a manter a tensão de saída dentro dos limites estabelecidos pela norma.
(Figura 5.19).
Figura 5.19 - Tensão no primário do transformador série obtidas quando ocorre sobretensão na rede MT
48
5.5 Cava na média tensão
Para o teste do sistema nestas condições foram considerados os seguintes pressupostos:
Tipo de Carga
Tensão em MT
Variação da
Duração da
Fase
Tensão
perturbação
Desequilibrada
Resistiva
A, B, C
A figura 5.20 reflecte o instante em que ocorre a cava na rede de média tensão.
Figura 5.20 - Tensões na rede MT obtidas quando o ocorre uma cava na rede MT
Esta situação é a mais gravosa para o funcionamento do sistema pois ao diminuir a tensão de
alimentação o sistema aproxima-se dos seus limites de funcionamento. Esta dificuldade de controlo
do sistema é mais sentida na corrente da média tensão como é possível verificar na figura 5.21.
Figura 5.21 - Corrente na rede MT
49
A corrente na média tensão apresenta uma ligeira distorção, o que indicai que o sistema se
encontra próximo do seu limite de funcionamento.
Contudo apesar desta situação a desfasagem entre a tensão e a corrente na rede de média
tensão continua próximo de um (FP=1) garantindo a qualidade da energia. (Figura 5.22)
Figura 5.22 - Tensão e corrente na rede MT obtidas quando o ocorre uma cava na rede MT
Apesar da cava de tensão se propagar para a baixa tensão o regulador de tensão BT
consegue garantir que esta perturbação não é sentida na carga como é visível na figura 5.23
Figura 5.23 - Tensões e correntes na carga obtidas quando o ocorre uma cava na rede MT
Nesta situação o conversor tem de injectar tensão na rede de baixa tensão. Como tal, a
tensão no primário do transformador série sofre um aumento na sua amplitude mantendo contudo a
fase (Figura 5.24).
50
Figura 5.24 - Tensão no primário do transformador série obtidas quando o ocorre uma cava na rede MT
51
52
6. Principais Conclusões
6.1 Conclusões
Esta dissertação, centrou-se no estudo de soluções para a regulação activa da tensão em BT
devido à alteração do paradigma do sistema eléctrico nacional.
Para tal, é proposto um sistema, constituído por um transformador de distribuição que à sua
saída tem em paralelo um conversor matricial ligado à rede BT através de um transformador série,
permitindo esta montagem o controlo das tensões na rede BT.
Com o objectivo de controlar sistemas desequilibrados, estudou-se, a implementação do
conversor matricial de quatro braços tendo por base o conversor matricial clássico, adicionando mais
um braço referente ao neutro que existe em sistemas desequilibrados.
A utilização do conversor matricial de quatro braços, implicou o estudo do seu funcionamento
em sistemas trifásicos, tanto no que diz respeito às relações entre as grandezas eléctricas de entrada
e saída do conversor, como os seus valores em diferentes planos, tanto no plano
plano
como no
.
Após o estudo inicial do funcionamento do conversor, foi implementado o controlo das
correntes à saída do conversor recorrendo ao controlo por ao modo de deslizamento onde, a corrente
de saída do conversor é comparada com as correntes de referência provenientes do controlo PI da
tensão na rede BT. Para a realização do controlo da corrente de saída, foram considerados todos os
vectores disponíveis, permitindo assim, que em cada instante existam sempre dois vectores
disponíveis para o seu controlo. Este facto permite a possibilidade de controlar a corrente de entrada.
Através da análise dos resultados das simulações realizadas, é possível concluir que o
sistema proposto é uma boa solução para o controlo e regulação da tensão em BT.
O sistema proposto consegue
garantir o valor eficaz da tensão na rede BT,
independentemente das perturbações do sistema ocorrerem em BT ou em MT, sendo as
perturbações imperceptíveis na tensão do lado da BT, o que comprova a rapidez e eficácia do
sistema.
O controlo por modo de deslizamento associado ao controlo vectorial directo com base nos
diferentes estados do conversor demonstrou ser adequado ao sistema proposto, como é possível
confirmar pela forma sinusoidal, tanto da corrente de saída do conversor, como da sua imagem na
linha de distribuição, garantindo ainda, que a corrente de entrada do conversor apresente também a
forma sinusoidal. O mesmo se passando com a corrente do lado da Média Tensão, que não
apresenta distorções significativas devido às correntes comutadas do conversor.
O controlador da tensão PI mostrou ser eficaz no estabelecimento das referências
necessárias para manter a estabilidade do sistema, demonstrando ser capaz de responder a vários
cenários de perturbação possíveis na rede BT.
53
No caso das sobretensões, foram conseguidas compensações nas perturbações de 20% face
ao valor nominal da tensão, já no caso das cavas de tensão, foi conseguida a compensação de cavas
com 10% de profundidade face ao valor nominal da tensão.
6.2 Perspectivas de trabalho futuro
A realização desta dissertação levantou novas questões que podem ter interesse no âmbito
da regulação activa da tensão em BT, sendo as mais significativas as seguintes:
Estudo de novos componentes de filtragem que permitam melhorar controlo do factor de
potência à entrada do conversor.
Estudo de novos controladores que permitam melhorar as formas de onda da corrente à
entrada do conversor e na rede de média tensão
Aplicação laboratorial do sistema proposto
Avaliação económica do sistema
54
Referências Bibliográficas
[Afonso, L. P.,2013]
Afonso, L P; Pinto, S F; Silva, J F; “Maximum Power Point
Tracker for Wind Energy Generation Systems Using Matrix
Converters”, Proc. POWERENG'13, pp 978-983, Istanbul,
Turkey, May 2013.
[Akagi et al, 2007]
Akagi, H., Watanabe, E., Aredes, M. “Instantaneous Power
Theory and Applications to Power Conditioning”, Wiley InterScience IEEE Press, 2007.
[Alcaria, P.,2013]
Alcaria, P; Pinto, S F; Silva, J F; “Active Voltage Regulators for
Low Voltage Distribution Grids: the Matrix Converter Solution”,
Proc. POWERENG'13, pp 989-994, Istanbul, Turkey, May 2013.
[Alesina et al,1989]
Alesina, A.; Venturini, M.; „Analysis and Design of OptimumAmplitude Nine-Switch Direct AC-AC Converters‟; IEEE Trans.
on Power Electronics, Vol. 4, No 1, pp.101-112, January 1989.
[Friedli, T. et al, 2012]
Friedli, T.; Kolar,J.; Rodriguez, J.; Wheeler, P.; “Comparative
Evaluation of Three-Phase AC–AC Matrix Converter and Voltage
DC-Link Back-to-Back Converter Systems”; IEEE Transactions
on Industrial Electronics, vol.59, no. 12; December 2012.
[Gambôa, P.,2007]
Gamboa, P; Pinto, S F; Silva, J F; Margato, E; “Predictive
Optimal Control of Unity Power Factor Matrix Converters used in
Field Oriented Controlled Induction Motor Drives”; IEEE
International Symposium on Industrial Electronics, ISIE 2007, pp
1334-1339, Vigo, Spain, June 2007.
[Gambôa, P.,2009]
Gambôa, P; Silva, J F; Pinto, S F; Margato, E.; “Control for a
Dynamic Voltage Restorer with Flywheel Energy Storage”, 35th
Annual Conference of IEEE Industrial Electronics - IECON'09, pp
759-764, Porto, Portugal, November 2009.
[Geury, T.,2013]
Geury, T; Pinto, S; Gyselinck, J; “Three-phase Power Controlled
PV Current Source Inverter with Incorporated Active Power
Filtering”, 39th Annual Conference of the IEEE Industrial
Electronics Society, IECON 2013, pp 1374-1379, Vienna,
Austria, November 2013.
[Jorge H, 2001]
Humberto, J.; “Qualidade da energia eléctrica: Textos de apoio”;
INESC - Coimbra, 2001.
[Lima, F. V.,2013]
Lima, F V; Pinto, S F; Silva, J F; “Power Electronics Voltage
Regulators for Distribution Transformers”, Proc. POWERENG'13,
pp 1362-1367, Istanbul, Turkey, May 2013.
55
[Monteiro, J.,2005]
Monteiro, J; Silva, J F; Pinto, S F; Palma, J; “Unified Power Flow
Controllers without DC bus: Designing Controllers for the Matrix
Converter Solution”, 1st International Conference on Electrical
Engineering (CEE05), Coimbra, Portugal, October 2005.
[Monteiro, J.,2011]
Monteiro, J; Silva, J F; Pinto, S F; Palma, J; “Matrix ConverterBased Unified Power-Flow Controllers: Advanced Direct Power
Control Method”, IEEE Transactions on Power Delivery, Vol. 26,
No 1, pp 420-430, January 2011
[Monteiro, J.,2014]
Monteiro, J; Silva, J F; Pinto, S F; Palma, J; “Linear and Sliding
Mode Control Design for Matrix Converter Based Unified Power
Flow Controllers”, IEEE Transactions on Power Electronics, Vol.
29, No. 7, pp. 3357-3367, July 2014.
[NP EN 50160, 2010]
Norma Portuguesa EN 50160, Características da tensão
fornecida pelas redes de distribuição pública de energia
eléctrica, Homologação em Diário da República, III Série n.º 170,
de 25 de Julho de 1995, Instituto Português da Qualidade, (EDP
e DGE)/IEP.
[Pinto, S. F.,2001]
Pinto, S F; Silva, J F; “Input Filter Design for Sliding Mode
Controlled Matrix Converters”, IEEE Power Electronics
Specialists Conference - PESC 2001, Vol. 2, pp 648-653,
Vancouver, Canada, June 2001.
[Pinto, S. F.,2003]
Pinto, S. F., “Conversores Matriciais Trifásicos: Generalização
do Comando Vectorial Directo”, PhD Thesis, Instituto Superior
Técnico Universidade Técnica de Lisboa, July 2003.
[Pinto, S. F.,2004]
Pinto, S F; Silva, J F; “Direct Control Method for Matrix
Converters with Input Power Factor Regulation”, IEEE 35th
Annual Power Electronics Specialists Conference - PESC 04,
Vol. 3, Pages 2366-2372, Aachen, Germany, June 2004.
[Pinto, S. F.,2006]
Pinto, S F; Silva, J F; “Matrix Converters: The Direct Control
Approach Using Sliding Mode”, International Review of Electrical
Engineering, Vol 1, No 4, pp 468-479, October 2006.
[Pinto, S. F.,2006]
[Pinto, S. F.,2006]
Pinto, S F; Silva, J F; “Input Filter Design of a Mains Connected
Matrix Converter”, IEEE International Conference on Harmonics
and Quality of Power, 12th ICHQP, Cascais, Portugal, October
2006.
Pinto, S.; Silva, J.; Gambôa, P.; “Current Control of a Venturini
Based Matrix Converter”, IEEE International Symposium on
Industrial Electronics – ISIE 2006, Vol. 4, pp. 3214 – 3219,
Montréal, Canada, July 2006.
56
[Pinto, S. F.,2007]
Pinto, S F; Silva, J F; “Sliding Mode Direct Control of Matrix
Converters”, IET Electric Power Applications, Vol 1, No 3, pp
439-448, May 2007.
[Pinto, S. F.,2007]
Pinto, S F; Aparício, L; Esteves, P; “Direct Controlled Matrix
Converters in Variable Speed Wind Energy Generation Systems;
IEEE International Conference on Power Engineering, Energy
and Electrical Drives, 2007, POWERENG 2007, pp 654-659,
Setúbal, Portugal, May 2007.
[Pinto, S. F.,2011]
Pinto, S F; Silva, J F; Silva, F.; Frade, P; “Design of a Virtual Lab
to Evaluate and Mitigate Power Quality Problems Introduced by
Microgeneration”, Chapter 8, pp 185-206, in “Electrical
Generation and Distribution Systems and Power Quality
Disturbances”, Editor Gregorio Romero, Intech, 2011.
[Silva, J.F., 2003]
Silva, J F; Pires, V F; Pinto, S F; Barros, J D; “Advanced Control
Methods for Power Electronics Systems”, Mathematics and
Computers in Simulation, Elsevier, No. 63, Vol. 3, pp 281-295,
November 2003.
[Silva, J, 2008]
Silva, J.; “Sistemas de Energia em Telecomunicações: Textos
de apoio”; Instituto Superior Técnico, Universidade Técnica de
Lisboa, 2008.
[Silva, J.F., 2011]
Silva, J. F.; Pinto, S. F.; “Advanced Control of Switching Power
Converters”, Cap. 36, pp 1037-1113, Power Electronics
Handbook 3rd edition, Editor M. H. Rashid, Burlington:
Butterworth-Heinemann, ELSEVIER, ISBN: 978-0-12-382036-5,
2011.
[Silva, J.F., 2012]
Silva, J F; “Input Filter Design for Power Converters”, Texto
Complementar da disciplina SAA, 2012
[Silva, J.F., 2012]
Silva, J F; Santana, J; Pinto, S F; “Conversores Comutados para
Energias Renováveis”, Texto de apoio, IST, 2012.
[Silva, J.F., 2013]
Silva, J F; “Electrónica Industrial”, 2nd edition, Série Manuais
Universitários, Fundação Calouste Gulbenkian, Lisboa 2013
[Sucena Paiva, 2005]
Sucena Paiva, J. P.; “Redes de Energia Eléctrica: uma análise
sistémica”, IST Press, pp.107-114, Lisboa, 2005.
[Wheeler P. et al, 2002].
Wheeler, P.; Rodríguez, J.; Clare, J.; Empringham, L.;
Weinstein, A.; “Matrix Converters: A Technology Review”, IEEE
Trans. On Industrial Electronics, Vol.49, Nº 2, pp. 276-288, April
2002.
57
58
Anexo
Anexo A
Transformador distribuição
Actualmente aos níveis de tensões usados em MT vão desde
Portugal os mais usuais são
, sendo que em
. Enquanto que do lado da BT, de acordo com a norma NP
EN 50160, os valores eficazes das tensões deverão ser de 230V ± 10% (tensões simples) e 400V ±
10% (tensões compostas), à frequência de 50 Hz.
Assim tendo em consideração os dois pontos acima referidos para proceder ao cálculo dos
parâmetros do modelo do transformador optou-se por caracterizar as condições de funcionamento.
Tensão MT – 30 KV
Tensão BT – 400 V
Potência Nominal – 630 kVA
Frequência – 50 HZ
Tipo de ligação – Dyn
Ensaio em vazio
Perdas em vazio (W)
1450
Corrente em vazio (%)
1.8
Tabela 8 - Dados de ensaio em vazio fornecido pelo fabricante
Tensão em vazio
Corrente de
Perdas em vazio
magnetização
Valor de catálogo
Valor de base
-
Valor em p.u
Tabela 9 - Dados de ensaio em vazio
59
Ensaio em curto-circuito
Perdas em vazio (W)
6650
Corrente em vazio (%)
4.5
Tabela 10 - Dados do ensaio em curto-circuito fornecidos pelo fabricante
Tensão em c.c
Corrente nominal
Perdas em c.c
Valor de catálogo
√
Valor de base
√
Valor em p.u
Tabela 11 - Dados de ensaio em curto-circuito
Tendo por base o esquema equivalente em T do transformador [Sucena Paiva, 2005] e tendo
como base as características técnicas apresentadas nas tabelas acima é possível determinar os
parâmetros do modelo considerando que:
No ensaio em vazio as perdas apresentadas correspondem às perdas no ramo de
magnetização, desprezando as perdas por efeito de joule nos enrolamentos do transformador
No ensaio em curto-circuito as perdas apresentadas correspondem às perdas por efeito de
Joule nos enrolamentos do transformador, desprezando o ramo de magnetização.
Ensaio em curto-circuito
O ensaio em curto-circuito é feito curto-circuitando os terminais do secundário e aplicando
uma tensão bastante inferior à tensão nominal no primário do transformador, fazendo circular a
corrente nominal em ambos os enrolamentos. Como a tensão aplicada no primário do transformador
é bastante inferior à nominal,
, o fluxo magnético é mínimo podendo assim ser
desprezado.
Desta forma obtêm-se os valores da resistência e reactância dos enrolamentos do
transformador, admitindo que ambos os enrolamentos apresentam valores de resistência e reactância
de fugas idênticos (3.19).
√
60
Ensaio em vazio
No ensaio em vazio é aplicada a tensão nominal ao secundário do transformador, enquanto
que o primário é deixado em aberto, quando se mede a corrente no primário ela corresponde apenas
ao valor necessário para magnetizar o transformador. Considerando também o facto de as perdas no
núcleo de ferro serem independentes da carga é possível calcular os parâmetros do ramo de
magnetização do transformador (3.20).
√(
)
Conclui-se assim que os parâmetros para o transformador de distribuição são os
apresentados na tabela 10.
Primário
Secundário
Ramo de Magnetização
R1
X1
R2
X2
Rm
Xm
0.0053
0.0219
0.0053
0.0219
434
56
Tabela 12 - Parâmetros do transformador de distribuição
61
Anexo B
Transformador série
Tal como no transformador distribuição, no transformador série é também necessário
caracterizar as condições de funcionamento de modo a dimensionar os parâmetros do modelo do
transformador.
A função do transformador série é permitir a ligação entre o conversor matricial e a linha de
distribuição de baixa tensão. A ligação do conversor ao primário do transformador e a rede de
distribuição ao secundário permite colocar uma tensão em série com a linha de distribuição. Deste
modo para proceder ao controlo da tensão de saída, o transformador série deve ter a capacidade de
fornecer energia, caso se verifique uma cava na tensão, ou de absorver energia, caso ocorra uma
sobretensão.
Tendo o sistema sido desenhado para perturbações na ordem de
, tanto para cavas
como para sobretensões, seria de prever que a potência do transformador série tivesse essa ordem
de grandeza fase ao transformador distribuição.
As características do transformador para que funcione com um rendimento aceitável são as
seguintes:
Tensão primário – 400 V
Tensão secundário – 400V
Potência nominal – 120 kVA
Frequência – 50 Hz
Ensaio em vazio
Perdas em vazio (W)
725
Corrente em vazio (%)
0.6
Tabela 13 - Dados de ensaio em vazio fornecido pelo fabricante
Ensaio em curto-circuito
Perdas em vazio (W)
6650
Corrente em vazio (%)
4.5
Tabela 14 - Dados do ensaio em curto-circuito fornecidos pelo fabricante
62
Considerando de novo o esquema equivalente em T, aplicando o mesmo processo que no
transformador de distribuição obtêm-se os valores para os parâmetros do transformador série.
Primário
Secundário
Ramo de Magnetização
R1
X1
R2
X2
Rm
Xm
0.0050
0.0022
0.0050
0.0022
275
209
Tabela 15 - Parâmetros do transformador de série
63