LOCALIZAÇÃO PARA DEFICIENTES VISUAIS UTILIZANDO UM GADGET
PARA ORIENTAÇÃO
ANDRÉ L. MONTEIRO, EDUARDO M. SILVA, IGOR C. F. LOPES
Instituto Federal do Ceará, IFCE
Av. 13 de Maio, 2081, Benfica, Fortaleza - CE, CEP: 60040-531, Brasil
[email protected], [email protected], [email protected]
RESUMO. O presente artigo tem como principal objetivo ajudar os deficientes a enfrentar com maior confiança
os obstáculos enfrentados na sociedade, tendo como foco a locomoção autônoma. Para isso, pensou-se no
princípio de um ciborgue, um organismo dotado de partes orgânicas e cibernéticas, geralmente com a finalidade
de melhorar suas capacidades utilizando tecnologia artificial. Inspirado nas competições de robóticas onde um
sensor de ultrassom é comumente utilizado para que o robô possa se localizar no ambiente, imaginou-se utilizar
o mesmo princípio para que deficientes visuais possam se localizar onde sensores de ultrassom seriam acoplados
nas lentes de um óculos dotado de fones de ouvido que guiariam o deficiente por ecolocalização. Com isso o
deficiente não dependeria de obras de acessibilidade e poderia se locomover com mais liberdade e confiança.
PALAVRAS-CHAVE: Óculos; Ecolocalização; Ciborgue; Deficiente Visual; Acessório.
ABSTRACT. This article aims to help disabled people cope with greater confidence the obstacles faced in
society, focusing on the autonomous locomotion. For this, it was thought at the beginning of a cyborg, a body
with organic and cybernetic parts, usually for the purpose of improving its capabilities using artificial technology.
Inspired by robotics competitions where an ultrasonic sensor is commonly used for the robot can be located in
the environment, it was believed to use the same principle for the visually impaired can be located where
ultrasound sensors would be attached to the lens of an eyeglass endowed with headphones that would guide the
poor by echolocation. With that, the poor would not depend on accessibility works and could get around with
more freedom and confidence.
KEYWORDS: Glasses; Echolocation; Cyborg; Visually Impaired; Gadget.
Durante a vida, praticamente todas as pessoas
convivem com situações desafiadoras, que exigem
criatividade e ação para superá-las ou contorná-las.
Nem sempre a tecnologia e os recursos financeiros,
quando combinados, são suficientes contra estes
desafios.
enfrentam constantemente, desafios estes que são
ultrapassados naturalmente por pessoas não cegas.
Reunindo conhecimentos obtidos durante a formação
acadêmica e de outras áreas, como a Medicina,
chegamos ao projeto mostrado neste artigo, com a
intenção de auxiliar deficientes visuais a terem
autonomia em atividades como deslocamento e
posicionamento em situações corriqueiras.
1.1 Motivação
1.2 Enquadramento
Este artigo vem propor uma solução alternativa
para uma doença alternativa: a cegueira. Basta
observarmos os desafios que os deficientes visuais
À data deste trabalho os principais sistemas para
auxilio no guia de cegos dependem sempre de obras
de infraestrutura, o que atrasa e dificulta muito a
popularidade dos dispositivos. Outros dispositivos
que seguem o mesmo princípio independentes de
obras de infraestrutura não possibilitam o livre
caminhar do usuário, pois o sistema desenvolvido foi
feito para evitar colisões de membros específicos, co-
1. INTRODUÇÃO
Submetido em 11/11/2014; revisado em 03/12/2014.
Artigo aceito sob recomendação do Editor-Chefe Prof. Dr.
Ginalber L. O. Serra.
Revista INNOVER, volume 1, número 4, Dezembro 2014
93
Localização para Deficientes Visuais Utilizando um Gadget para Orientação
CARDOSONo dia-a-dia observa-se a situação de deficientes
mo braços e mãos, e não o corpo como um todo. Este
artigo descreve então um sistema compacto, simples visuais, podemos ver as dificuldades que eles
e independente de outros serviços. Neste projeto foi enfrentam com a precária situação de acessibilidade
construído apenas um protótipo, sendo portanto um do mundo, atividades simples, como uma pequena
ponto de partida para a realização de trabalhos mais caminhada, tornam-se verdadeiros desafios.
aprimorados.
Das dificuldades de locomoção para os deficientes
Na próxima seção é definido o que é cegueira, visuais, podemos listar:
além de ser mostrado o panorama dos deficientes
visuais no mundo. Na seção 3 é discutida a ● A irregularidade nas calçadas: obstáculos como
capacidade biológica que motivou a idealização do arvores, postes, orelhões e/ou outros objetos
projeto. Na seção 4 é explicada a composição do interrompem a circulação;
hardware. Na seção 5 é explicado o funcionamento do
software. Na seção 6 são relatadas as fases de ● A falta de consciência dos moradores que
montagem e execução do projeto. Na seção 7 é constantemente estacionam em cima de calçadas e/ou
exibido o valor médio de cada componente do óculos. colocam entulhos nelas;
Na seção 8 são discutidas as dificuldades e,
finalmente, na seção 9, as conclusões.
● Em ambientes interiores que não se conhece a
disposições dos moveis e paredes, e nos conhecidos a
impossibilidade de mudanças dos mesmos;
2. CEGUEIRA
Cegueira é a condição de falta de percepção visual,
devido a fatores fisiológicos ou neurológicos. Várias
escalas têm sido desenvolvidas para descrever a
extensão da perda de visão e definir a cegueira.
Cegueira total é a completa falta de percepção visual
de forma e luz e é clinicamente registrado como NLP,
uma abreviação para "no light perception" (sem
percepção de luz). A cegueira é frequentemente usada
para descrever a deficiência visual grave, com visão
residual. Aqueles descritos como tendo apenas
percepção de luz têm apenas a capacidade de
diferenciar o claro do escuro e a direção de uma fonte
de luz.
2.1 Cegueira no Brasil e no mundo
O Brasil tem 1,1 milhão de deficientes visuais os
quais representam 0,6% da população, número esse
que vai aumentar, pois estima-se que a cada cinco
segundos uma pessoa fica cega no nosso mundo. A
deficiência visual, como quaisquer outras formas de
deficiência, gera custos para o estado com obras de
acessibilidade. Este custo econômico da cegueira, no
mundo, é estimado em US$ 28 bilhões por ano, custo
que aumentaria consideravelmente se vivêssemos em
condições ideais de acessibilidade para os cegos
(SBPORTAL, 2014).
94
Revista INNOVER, volume 1, número 4, Dezembro 2014
● Em ambientes com alto nível de circulação de
pessoas sendo impossível prever uma colisão.
3 ECOLOCALIZAÇÃO (OU BIOSSONAR)
A ecolocalização é uma sofisticada capacidade
biológica de detectar a posição e/ou distância de
objetos (obstáculos no meio ambiente) ou animais
através de emissão de ondas ultrassônicas, no ar ou na
água, e análise ou cronometragem do tempo gasto
para essas ondas serem emitidas, refletirem no alvo e
voltarem à fonte sobre a forma de eco (ondas
refletidas). Para diversos mamíferos, como morcegos,
golfinhos e baleias, essa capacidade é de importância
crucial em condições onde a visão é insuficiente, de
noite no caso dos morcegos ou em águas escuras ou
turvas para os golfinhos, seja para locomoção ou para
captura de presas.
Alguns pássaros também utilizam a ecolocalização
para voarem em cavernas. Baseado nessa capacidade
natural os seres humanos desenvolveram a
“ecolocalização artificial” com o advento do radar,
sonar e aparelhos de ultrassonografia.
Na Fig. 1, pode-se ver como o morcego usa esta
habilidade em seu favor.
ANDRÉ L. MONTEIRO, EDUARDO M. SILVA, IGOR C. F. LOPES
3.1.1 Dificuldades no uso da ecolocalização pelos
humanos
Fig. 1. Morcego utilizando a ecolocalização para posicionar-se
em relação à presa.
3.1 Ecolocalização nos seres humanos
Alguns humanos já utilizaram a ecolocalização
com sucesso, aprendendo sozinhos. Daniel
Kishaprendeu a técnica sozinho e é a única pessoa
cega certificada a guiar outras pessoas cegas. Ben
Underwood, outro cego, era considerado o melhor
ecolocalizador do mundo até a sua morte, no começo
de 2009. De acordo com Martínez, desenvolver essas
habilidades não é tão difícil quanto pode parecer:
“Duas horas de treino por dia por duas semanas é
suficiente para saber se há um objeto na sua frente, e
dentro de mais duas semanas já é possível perceber a
diferença entre árvores e muros”, diz. Martínez
afirma que o estudo está trabalhando para ajudar
pessoas cegas e surdas a usar este método no futuro,
pois os ecos não são percebidos apenas pelo ouvido,
mas também em vibrações na língua e nos ossos.
“Para essas pessoas, em especial, e para todos nós,
seria um novo jeito de perceber o mundo”, diz.
Os pesquisadores reconhecem que ainda estão em
estágios iniciais da pesquisa, mas as possibilidades
que podem ser abertas pelo desenvolvimento da
ecolocalização em humanos são enormes. A técnica
pode ser utilizada não apenas por cegos, mas também
por bombeiros e equipes de resgate procurando
pontos de saída em incêndios, além de pessoas presas
na fumaça. (HYPESCIENCE, 2014).
É necessário existir um obstáculo que esteja a mais
do que 17 metros de distância da pessoa que emite o
som; o obstáculo tem que ser feito de um material
polido e denso que não absorva o som, por exemplo,
metais, rochas, e carnes magras.
O ser humano detecta dois sons que estejam
separados por 0,1 segundos, ou seja, para a
velocidade do som no ar (340 m/s), esse tempo
representa 34 metros. Assim, se o obstáculo estiver a
menos de 17 metros não detectamos a diferença entre
o som que emitimos e o som que recebemos, e desse
modo, o eco não acontece apesar de a onda ter sido
refletida.
Os seres humanos só conseguem emitir de 3 a 4
ondas sonoras por segundo, diminuindo muito a sua
capacidade de acurácia em comparação a outros
animais que conseguem emitir até 200 ondas sonoras
por segundo.
4
CONSTITUIÇÃO
(HARDWARE)
DO
GADGET
4.1 Princípio geral de funcionamento
De modo a conceber um dispositivo móvel, leve,
que oriente o usuário com simplicidade, e com o
mínimo de impacto visual possível na sua aparência,
foram utilizados o mínimo de dispositivos possíveis,
todos montados em uma estrutura de comum uso no
cotidiano.
Genericamente, o gadget é constituído por:
Um módulo de controle;
Dois sensores de ultrassom;
Dois fones de ouvido;
Baterias;
Uma estrutura de apoio.
Revista INNOVER, volume 1, número 4, Dezembro 2014
95
Localização para Deficientes Visuais Utilizando um Gadget para Orientação
CARDOSO
Primeiro foi preciso pensar como o sistema sensor
controle remoto contém um microcontrolador: TVs e
estaria sempre direcionado para o caminhar do sistemas de som de alta fidelidade entram nesta
usuário, chegou-se à conclusão que os sensores categoria.
Além
disso,
também
têm
deveriam estar posicionados em alguma região da microcontroladores: câmeras SLR e câmeras digitais,
face, pois mesmo após perder a visão, tem-se uma telefones celulares, filmadoras, impressoras a laser,
tendência natural de manter a cabeça alinhada com o telefones, tela de led (Fig. 2), etc. Basicamente,
caminhar. Porém, além de não ser cômodo ter qualquer produto ou dispositivo que interaja com o
diversos sensores atrelados à face, pensou-se em usuário possui um microcontrolador interno.
acopla-los em um óculos, que disfarçaria não só os
Um microcontrolador é um computador. Todos os
sensores, mas todo o sistema e seus diversos computadores possuem várias características em
componentes. Os sensores de ultrassom são fixados comum:
próximos a lente do óculos com uma angulação de 35
graus entre eles, isso faz com que cada sensor seja Todos os computadores possuem uma CPU
responsável por um único lado do usuário, direito e
(unidade de processamento central) que executa
esquerdo. Os sensores então, após aferirem a
programas;
distância ao obstáculo mais próximo, retorna o valor
dessa distância para o modulo de controle que envia A CPU carrega o programa de algum lugar;
um sinal sonoro para os fones de ouvido com uma
frequência de tom e uma frequência de bip O computador possui memória RAM (memória
proporcionais a proximidade encontrada. Quanto
de acesso aleatório) onde ele pode armazenar
mais próximo mais agudo se torna o tom e maior se
variáveis.
torna a frequência do bip.
O usuário deve então interpretar o escoar dos fones
de ouvido, tal qual um deficiente visual que
desenvolver ecolocalização natural faz, e assim evitar
colisões iminentes.
4.2 Unidade lógica
Com o objetivo de controlar todos os módulos
intervenientes no gadget, tais como a gestão de dados
recolhidos dos sensores, o envio da informação para
os fones, a tomada de decisões relativas à operação
do sistema, entre outras, utilizou-se um
microcontrolador programável.
4.2.1 Microcontrolador programável
Os microcontroladores estão escondidos dentro de
inúmeros produtos. Se um forno de microondas tem
um LED ou visor LCD e teclado, ele contém um
microcontrolador. Os automóveis modernos contêm
ao menos um microcontrolador (e podem muito
mais!): o motor é controlado por um
microcontrolador,
bem
como
os
freios
antitravamento, o controle de velocidade de viagem e
assim por diante. A maioria dos aparelhos com
96
Revista INNOVER, volume 1, número 4, Dezembro 2014
Figura2: Aplicação de microcontrolador em tela de led.
Microcontroladores geralmente são dispositivos
de baixa potência, podendo consumir até 50
miliwatts. Um microcontrolador possui um
dispositivo dedicado de entrada (mas nem sempre) e
geralmente possui um pequeno LED ou visor LCD de
saída. Um microcontrolador também obtém a entrada
do dispositivo que está controlando e o controla
enviando sinais a diferentes componentes desse
dispositivo. Um microcontrolador geralmente é
pequeno e barato. Os componentes são escolhidos
para minimizar o tamanho e serem os mais
econômicos possíveis.
ANDRÉ L. MONTEIRO, EDUARDO M. SILVA, IGOR C. F. LOPES
Geralmente, os microcontroladores programáveis
são programados em BASIC, C, Pascal ou Java.
4.2.2 Escolha do microcontrolador
No início do projeto, onde apenas se simulou, foi
utilizado um microcontrolador da Microchip®,
essencialmente pelo fato de os autores estarem
familiarizados com os produtos da marca e por se
encontrar com mais facilidade conteúdo de estudo na
internet para simulação. Na fase de execução, optouse por utilizar um microcontrolador da Atmel®, não
em específico pela marca do microcontrolador, mas
por esses já virem montados em placas de
prototipagem prontas para uso. Placas essas
conhecidas como Arduino. Dentre os produtos da
Arduino há um vasto leque de placas de
prototipagem, entre as quais se selecionou uma de
acordo com um requisito essencial: tamanho
compacto. Com isso, a escolha voltou-se para o
Arduino nano V3, conforme mostrado na Fig. 3, que
vem com um microcontrolador Atmega328 e
dimensões reduzidas de 1,86cm por 4,31cm.
Com isso, pode-se ao se produzir comercialmente o
produto, utilizar-se apenas do microcontrolador da
placa de prototipagem reduzindo ainda mais custos,
tamanho, e potencia consumida.
4.3 Medição da distância
Neste projeto, a detecção de obstáculos e
conhecimento da distância dos mesmos é essencial.
Para isso se utilizou de sensores de ultrassom que
conseguem lhe dar esses dois dados ao mesmo tempo.
Esses sensores se caracterizam por operar por um tipo
de radiação não sujeita a interferência
eletromagnética e totalmente limpa, o que é muito
importante para o projeto, pois o intuito é poder levar
usuário para qualquer tipo de ambiente.
O sensor típico é formado por um emissor e um
receptor, porem como o projeto visa ser compacto,
optou-se por um sensor em que o receptor e emissor
são um só e um circuito comutador visa efetuar a
troca de função no momento oportuno. Como tal, a
escolha recaiu sobre um modelo da Maxbotix. O
mesmo ainda fornece a possibilidade de captar o sinal
de forma analógica, de forma serial, ou por PWM,
oque multiplica as possibilidades de se trabalhar com
ele.
4.3.1 Características do sensor de ultrassom
Utilizou-se um sensor LV-MaxSonar-EZ da
MaxBotix como apresentado na Fig. 4, abaixo.
Figura 3: Arduino nano V3.
Note-se que, sendo o objetivo deste trabalho a
concepção de um dispositivo portátil, seria natural
que a escolha passasse também pelo estudo da
potência consumida. Contudo, este elemento não foi
tido em conta, pois o valor da potência não varia
muito com o modelo, mas sim com a frequência
utilizada.
Figura 4: Sensor LV-MaxSonar-EZ da MaxBotix.
Revista INNOVER, volume 1, número 4, Dezembro 2014
97
Localização para Deficientes Visuais Utilizando um Gadget para Orientação
CARDOSO
O sensor tem uma exatidão de 2,54 centímetros
garantida pelo seu intervalo máximo de 6 metros de
funcionamento e mínimo de 15 centímetros. Ele
fornece a possibilidade de captar o sinal de forma
analógica, de forma serial, ou por PWM, o que
multiplica as possibilidades de se trabalhar com ele.
Tem baixo consumo de potência elétrica, pode
detectar pessoas a até 2,5 metros.
4.3.2 Princípio de funcionamento
O transdutor utilizado no projeto é esquematizado
na Fig. 5.
Figura 6: Circuito elétrico utilizado no projeto.
4.4 Feedback para o usuário
O gadget necessita de alguma forma responder ao
usuário o quão próximo ele está de um obstáculo, para
que, com isso, ele possa tomar com mais cautela que
direção seguir. Para isso foi pensado em utilizar fones
de ouvido, que guiarão ele através de sinais sonoros,
tal qual um sensor de estacionamento faz com um
motorista.
4.4.1 Fones de ouvido
Figura 5: Transdutor.
Quando um sinal elétrico é aplicado no vibrador
(Horn) da cápsula (case), construído com uma ou
duas folhas de cerâmica piezoelétrica e uma placa de
metal (Metal plate), é gerada uma vibração mecânica
que passa a irradiar para o ambiente ondas sonoras de
ultrassom. De modo inverso, quando uma vibração
mecânica é aplicada no vibrador (Horn) da cápsula
(case), ele gera um sinal elétrico. O sensor utilizado
já vem com um circuito para tratar o sinal elétrico
recebido pelo elemento sensor, ele já amplifica, filtra
e lhe fornece a possibilidade de trabalhar com PWM,
porta analógica, ou porta serial, como comentado
anteriormente. O circuito pode ser visto na Fig. 6.
98
Revista INNOVER, volume 1, número 4, Dezembro 2014
Um alto-falante funciona basicamente da
maneira inversa de um microfone. É um tipo de
transdutor que recebe o sinal elétrico e o converte
em vibrações físicas, criando uma variação na
pressão no ar à sua volta e, consequentemente,
dando origem às ondas sonoras. A Fig. 7
esquematiza um alto-falante genérico:
Figura 7: Interação do conjunto magnético, bobina móvel
percorrida por corrente, magnetização do ímã permanente e
força resultante.
ANDRÉ L. MONTEIRO, EDUARDO M. SILVA, IGOR C. F. LOPES
O principal componente do alto-falante é o seu
conjunto magnético: o ímã permanente e a bobina
(que produzirá um campo magnético à medida que for
percorrida por corrente). A produção da corrente
acontece da seguinte maneira: a bobina móvel está
imersa neste campo magnético do ímã permanente e,
à medida que se aplica uma corrente alternada em
seus terminais, é gerada também uma densidade de
fluxo magnético pela bobina. A interação entre estes
dois campos magnéticos faz com que a bobina móvel
se desloque num determinado sentido. Como a
corrente é alternada, o sentido do campo magnético
gerado pela bobina varia de acordo com a variação do
sentido da corrente, fazendo com que a direção da
força resultante também alterne. A mudança de
direção da força gerada dá origem ao movimento da
bobina móvel e, consequentemente, da centragem e
do cone, ocasionando também a movimentação do ar
na mesma frequência e gerando a onda sonora.
4.4.2 Escolha do fone
Por fones de ouvido serem equipamentos muito
frágeis e descartáveis, optou-se por adicionar ao
óculos, plugues P2 onde o usuário poderia plugar o
fone que melhor lhe atender. Com isso, um possível
defeito nos fones seria facilmente solucionado
bastando o usuário apenas efetuar a troca dos
mesmos. Na Fig. 8 é mostrado como os fones foram
posicionados.
4.5 Alimentação
Na Fig. 9 é mostrada uma pilha palito, tipo
utilizado na alimentação do gadget.
Fig. 9. Pilha AAA.
Ao nível da alimentação pretende-se equilibrar
peso e máxima autonomia, com um mínimo de
funcionamento de 15 horas continuas. Para tal,
utilizou-se um sistema com duas baterias
recarregáveis de lítio em serie de 3,7 volts cada
fornecendo a voltagem mínima para o circuito
funcionar que é de 7 volts, com capacidade de 3200
mAh cada, o que é mas que o necessário para o
circuito funcionar pelo tempo previsto. As pilhas
foram compradas pela internet e custaram R$ 9,99
cada.
4.5.1 Consumo de potência elétrica
Para o cálculo do consumo eléctrico da estação
utilizaram-se os dados dos fabricantes ou resultados
experimentais, consoante o componente em questão.
Apresenta-se, na Tab. 1, o consumo discriminado de
cada componente, utilizando-se os valores máximos
de cada um para assim ter-se um quadro do pior caso
possível em termos de consumo elétrico.
Componente
Figura 8: Protótipo mostrando o detalhe do fone de ouvido.
Consumo de Energia Teórico
Tensão Corrente Potência
Microcontrolador
5V
40mA
200mW
Sensor esquerdo
5V
3mA
15mW
Sensor direito
5V
3mA
15mW
Fone esquerdo
5V
20mA
100mW
Fone direito
5V
20mA
100mW
Tab. 1. Consumo de energia do gadget.
Revista INNOVER, volume 1, número 4, Dezembro 2014
99
Localização para Deficientes Visuais Utilizando um Gadget para Orientação
CARDOSO
Quando o gadget está em funcionamento normal
todos os dispositivos estão ativos. De seguida,
realizou-se o cálculo da energia consumida durante
um dia de funcionamento e a potência consumida
pelo gadget.
Para estes cálculos, supôs-se que o gadget irá estar
em funcionamento aproximadamente 15 horas por
dia. Em modo normal de funcionamento a estação
consome no máximo 430mW (consumo instantâneo).
A energia máxima de consumo ao longo do dia é de:
𝐸[𝑚𝑊ℎ] = 430 × 15 = 6450
(1)
Fica-se assim a saber que a estação necessita de, no
mínimo, 6450 mWh por dia.
4.5.2 Baterias
As pilhas consistem em fontes químicas de energia
elétrica, ou seja, dispositivos que convertem energia
liberada numa reação química em energia elétrica. As
baterias estão em todos os lugares, carros,
computadores, laptops, MP3 players e telefones
celulares. Grosso modo, uma bateria é essencialmente
uma lata cheia de químicos que produz elétrons.
Qualquer bateria tem 2 terminais. Um terminal está
marcando (+), ou positivo, enquanto o outro terminal
está marcado com (-), ou negativo. Em uma bateria
tipo AA, C ou D (baterias normais de lanternas), as
pontas das baterias são os terminais. Em uma bateria
grande (de carro, por exemplo), existem 2 terminais
de chumbo. O princípio de funcionamento é o
seguinte: Elétrons se agrupam no terminal negativo
da bateria. Conectando um fio entre os terminais
positivo e negativo, os elétrons fluirão do terminal
negativo para o terminal positivo o mais rápido que
eles puderem, gerando a corrente elétrica.
Descarregar a bateria muito rapidamente pode ser
perigoso, principalmente com baterias grandes.
Pilhas palito: AAA (ou 3A). Pequenas, suportando
pouca energia quando comparadas com pilhas
maiores (AA). São as mais utilizadas em MP3 Players
e em outros dispositivos de tamanho reduzido.
4.6 Esquema de ligação
Na Fig. 10 é mostrado o circuito do gadget.
100
Revista INNOVER, volume 1, número 4, Dezembro 2014
Figura 10: Ligação do circuito.
O circuito final é composto de vários circuitos
lógicos controlados por um microcontrolador
(atmega328): Circuito do clock composto por dois
capacitores de 33µF (C1 e C2) e um cristal de 20MHz
(X10) ligados a porta 9 e 10 e ao terra; Circuito de
reset composto por um resistor de 10 KΩ (R1), um
capacitor de 100µF (C3) e um push bottom ligados a
porta 1 junto com alimentação e terra; Circuito do
sensor incluindo os sensores ultrassônicos (LVMMAXSONAR-EZ1) utilizados em modo PWM
ligados as duas portas PWM do microcontrolador;
Circuito do Som composto por dois fones de ouvido
(LS1 e LS2) acionados por transistores BC548 (Q1,
Q2, Q3 e Q4), dois resistores de 4,7 KΩ (R4 e R5), um
resistor de 2,7 KΩ (R3) conectados a porta 11, 12 e
13, e um potenciômetro de 10 KΩ (RV1) conectado a
uma porta do conversor A/D do microcontrolador;
Circuito gestor de energia composto por duas pilhas
de 3,7 V e 3200 mAh em série, um divisor de tensão
(R7 e R6) que é conectado a uma porta do conversor
A/D do microcontrolador, um CI regulador de tensão
(7805) uma chave de liga e desliga (SW1) e um
vibrador (vibra) acionado por um transistor BC548
(Q5) e um resistor de 10 KΩ (R2) conectado à porta
21.
ANDRÉ L. MONTEIRO, EDUARDO M. SILVA, IGOR C. F. LOPES
5 SOFTWARE
O software desenvolvido no âmbito deste projeto é
bastante simples pois foi necessário apenas fazer com
o microcontrolador lesse o valor da distância
fornecida pelos sensores e gerenciasse os fones de
ouvidos para o feedback. Este software foi
desenvolvido em linguagem C, utilizando o ambiente
de trabalho MPLAB.
5.1 Linguagem utilizada
A linguagem de programação escolhida para o
software foi C. C é uma linguagem de programação
orientada a estruturas, fundamental para diversos
programas internos de um sistema operacional, por
exemplo.
É uma linguagem de programação compilada de
propósito geral, estruturada, de alto nível, e
padronizada, criada para desenvolver o sistema
operacional UNIX (que foi originalmente escrito em
Assembly).
A linguagem C é classificada de alto nível pela
própria definição desse tipo de linguagem. A
programação em linguagens de alto nível tem como
característica não ser necessário conhecer o
processador, ao contrário das linguagens de baixo
nível.
As linguagens de baixo nível estão muito ligadas
ao processador. Permite acesso de baixo nível com a
utilização de código Assembly no meio do código
fonte. Assim, o baixo nível é realizado por Assembly
e não C. Desde então, espalhou-se por muitos outros
sistemas, e tornou-se uma das linguagens de
programação mais usadas, e influenciou muitas
outras linguagens, especialmente C++, que foi
originalmente desenvolvida como uma extensão para
C.
É usada na resolução de cálculos numéricos
avançados e soluções de situações engenhosas,
devido à sua estruturação.
5.2 Princípio de funcionamento da lógica
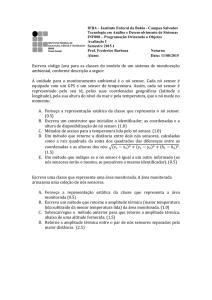
Na Fig. 11 é exibido o diagrama de decisões
tomadas pelo software.
Figura 11: Diagrama de blocos utilizado na lógica de
programação.
Os sensores de ultrassom “calculam” a distância entre
o usuário e o obstáculo mais próximo, fazendo isso de
forma independente tanto para o lado direito quando
para o lado esquerdo do usuário. Para poder se fazer
dois processos paralelos e independentes utilizandose apenas um microcontrolador que contém apenas
um núcleo de processamento, utilizou-se de uma
biblioteca chama “Thread”, ela possibilita simular um
segundo núcleo, gerando processos simultâneos.
Então, as distâncias calculadas pelos sensores geram
um sinal PWM que é lido pela porta PWM, nos dando
um pulso com largura em microssegundos, cada 147
microssegundos de largura de pulsa corresponde a
uma polegada, com é possível se calcular a distância
lida pelo sensor. Depois de calculada a distância do
lado esquerdo, o microcontrolador satura e corta um
dos transistores do fone de ouvido do lado esquerdo,
o transistor escolhido, nesse caso, é sempre o que não
tem ligação comum com o fone de ouvido do lado
direito, e a frequência de comutação é inversamente
proporcional à distância calculada.
Revista INNOVER, volume 1, número 4, Dezembro 2014
101
Localização para Deficientes Visuais Utilizando um Gadget para Orientação
CARDOSO
Em paralelo a esse processo ocorre o mesmo para
Nesta fase, o protótipo foi montado de forma apenas
o sensor do lado direito e o fone de ouvido do lado que ficasse funcional, portanto será normal haver
esquerdo. O resultado prático é que o usuário escutará algumas discrepâncias em comparação com o produto
um tom intermitente no ouvido esquerdo e direito de final. As hastes do óculos foram utilizadas como
forma independente, e que será cada vez mais apoio para as pilhas e o microcontrolador, as lentes
continuo no sentido em que o obstáculo se aproxima foram furadas com uma circunferência tal que os
do usuário. O usuário também pode desligar ou ligar sensores precisaram apenas serem encaixados para
o equipamento no momento que lhe for oportuno e sua fixação e ao lado do microcontrolador temos um
saber que função utilizou, para isso foi colocado um botão de liga e desliga. Os fones de ouvido tiveram
vibrador que quando o óculos ligar ele vibrará por de ficar soldados na placa de prototipagem, pois
alguns segundos e quando for desligado ele não fará estavam com mau contato. Os testes nessa fase se
nada. O vibrador também indica quando o limitaram apenas ao uso dos próprios autores do
equipamento descarregou, com a bateria sendo projeto, ao tentarmos uma visita a Associação de
monitorada constantemente pelo divisor de tensão Cegos do Estado do Ceará (ACEC) fomos informados
ligado ao conversor A/D do microcontrolador. da necessidade de um agendamento que ficou para
Quando a tensão estiver no limiar de não suportar fevereiro de 2015. Os testes realizados foram
mais a carga, o vibrador irá vibrar até a descarga da simulações do cotidiano de um deficiente visual,
bateria, com essa vibração mais prolongada que a de como caminhar pela calçada e passear pelo shopping.
liga, o usuário identificará que o dispositivo
descarregou.
6.1.1 Problemas e dificuldades
6 MONTAGEM E EXECUÇÃO
A montagem e execução no projeto foi dividida em
duas partes. A primeira em fase de testes onde se tem
o interesse apenas de testar o funcionamento na
pratica. E a Segunda em simulação, onde se modelou
o óculos em software de CAD, da forma como se
pensou o produto final.
6.1 Fase de testes
A versão final (atual) do protótipo é exibida na Fig.
12.
Percebeu-se certo desequilibro ao vestir os óculos,
porem o problema foi solucionado colocando ligas na
parte de trás do óculos, pressionando-o contra a
cabeça, deixando todo o conjunto bem fixo. Por
optarmos comprar uma réplica da placa de
prototipagem Arduino devido ao custo, esbarramos
em um problema com o conversor 232 que
acompanha a replica. Um conversor da marca WCH,
diferente do FTDI que acompanha o original. Esse
conversor apresenta constantes erros na comunicação
com o computador o que atrasou muito o desenvolver
do projeto. Os sensores também apresentaram
aparente defeito, sua medição, mesmo com eles
estáticos, variou muito na leitura, com variações de
metros para mais e para menos.
6.2 Fase Final
Figura 12: Versão final do projeto.
102
Revista INNOVER, volume 1, número 4, Dezembro 2014
Para a fase final se pensou bastante na estética e
ergonomia do gadget, então foi criado uma caixa que
iria à parte de trás da cabeça acoplada ao óculos por
meio de elásticos, mostrada na Fig. 13. Nessa caixa
ficará todo o circuito elétrico que não se necessita
ficar a mostra, como as baterias para alimentação. Na
figura acima podemos ver a caixa. Foi adicionada a
ela uma chave seletora para regular a distância que o
ANDRÉ L. MONTEIRO, EDUARDO M. SILVA, IGOR C. F. LOPES
usuário gostaria de sensoriar, a regulação pode ser
feita em três níveis, curtas distancias, longas
distancias, e medias distancias. A direita ficou um
botão do tipo push-bottom para ligar e desligar o
dispositivo.
Figura 15: Visão frontal do óculos.
Figura 13: Caixa com a lógica.
Para fácil identificação do usuário os botões estão
legendados em Braille. Nas Fig. 14-16 consegue-se
ter uma idéia melhor de como ficou o conjunto
completo.
Figura 16: Visão traseira do óculos em uso.
7 CUSTOS DO PROJETO
A seguir, são listamos os componentes do
protótipo, bem como o custo que cada um agrega ao
produto final, na Tab. 2.
Componente
1 Óculos esportivo
1 Arduino V3.0
1 Fone de ouvido
2 pilhas de 3200 mAh
recarregáveis
2 sensores ultrassom
Total
Figura 14: Visão isométrica do óculos em uso.
Preço médio
R$ 200,00
R$ 35,00
R$ 70,00
R$ 20,00
R$ 110,00
R$ 435,00
Tabela 2: Investimento.
Revista INNOVER, volume 1, número 4, Dezembro 2014
103
Localização para Deficientes Visuais Utilizando um Gadget para Orientação
8 LIMITAÇÕES E MELHORIAS
CARDOSO
Após análise e estudo mais aprofundado sobre os
sensores de ultrassom, verificou-se que eles podem
estar sofrendo interferência por reflexões indevidas
eem razão da grande quantidade de anteparos que
existem em um ambiente não controlado, como é o
caso de ambientes externos. Também, problemas de
reverberação podem estar surgindo devido à grande
variedade de objetos que estão sendo sensoriados,
dificultando bastante uma calibração efetiva. A falta
de mais sensores disponíveis também dificultou
bastante diagnosticar se o problema estava com
sensores defeituosos ou se realmente estávamos
fazendo mau uso dele.
Para solucionar o problema pensou-se em usar
sensores de infravermelho em logica ‘E’ com os
sensores de ultrassom, onde os sensores de
infravermelho fariam o trabalho de detectar a
presença e os de ultrassom a distância, isso evitaria
falsas detecções como ocorreram nos testes.
Atualmente estamos com a possibilidade do usuário
sensoriar longas distancias, setando a chave seletora
para a opção longe ele consegue sensoriar até 4,
diminuir o raio de sensoriamento para 2,5 metros
ajuda pois se teria um ambiente menos ruidoso e o
usuário ainda teria tempo hábil de efetuar o desvio.
O pensamento de reutilizar vibração no lugar de som
para o feedback também está sendo estudado, as
possibilidades aumentariam tendo em vista que com
a vibração teríamos todo o corpo humano para utilizar
como feedback, com isso guiaríamos o usuário com
maior precisão devido a capacidade de adicionarmos
um sensor dedicado para cada vibrador de feedback.
Contudo, isso poderia tornar o sistema mais
confuso ao usuário, tendo ele de processar muita
informação ao mesmo tempo, a vibração pode ficar
incomoda e o projeto não ficaria compacto somente a
um óculos pois seria necessário a passagem de fiação
para alimentação dos vibradores. Para simplificar o
uso dos vibradores pensou-se em substituir o óculos
por uma faixa, típica usada por esportistas para
segurar o suor. A tiara pode ser vista na Fig. 17.
104
Revista INNOVER, volume 1, número 4, Dezembro 2014
Figura 17: Exemplo de faixa.
Se o circuito for bem distribuído ele caberia com
facilidade dento da parte oca da costura, e o tecido
macio amorteceria a vibração, diminuindo o
incomodo gerado. Poderíamos adicionar um sistema
sensor para o lado esquerdo, um para o lado direto e
um frontal, cada um com seu respectivo dispositivo
vibrador gerando o feedback ao usuário, incumbindo
ele de interpretar os sinais do feedback e traçar sua
rota.
9 CONCLUSÕES
Apesar de o projeto nos seus testes iniciais não ter
apresentado bons resultados, os autores do trabalho
acreditam ser possível desenvolver um dispositivo
usual, que possa guiar os deficientes visuais sem a
necessidade de tanta obra de acessibilidade,
deixando-o mais independente. Porém mais testes e
diferentes equipamentos são necessários, o que
impossibilita seguir com o projeto sem o devido apoio
financeiro. .
ANDRÉ L. MONTEIRO, EDUARDO M. SILVA, IGOR C. F. LOPES
REFERÊNCIAS
VILAÇA, M. L. C. Pesquisa e Ensino: Considerações
e Reflexões. Revista Escrita, vol. 1, no. 2, MaioAgosto, 2010.
HYPESCIENCE, Http://hypescience.com/
cientistas desenvolvem ecolocalizacao dos morcegos em humanos, acesso em
27 de abril de 2014.
SBOPORTAL,
http://www.sboportal.org.br/links.a
spx?id=7, acesso em 27 de abril de 2014.
SABERELETRONICA,
http://www.sabereletronica.com.br/a
rtigos/1753-sensores-ultra-snicos,
acesso em 26 de novembro de 2014.
Eduardo M. Silva é Graduando
em Mecatrônica, entrou no Instituto
Federal do Ceará em 2011 com
previsão de conclusão em 2015.
Atualmente
trabalha
como
professor em uma instituição de
ensino pública. Suas áreas de interesse são eletrônica,
programação em baixo nível e desenvolvimento de
projetos.
Igor C. F. Lopes é graduando em
Mecatrônica, entrou no Instituto
Federal do Ceará em 2011 com
previsão de conclusão em 2015.
Atualmente
trabalha
como
estagiário na DPM engenharia.
Suas areás de interesse são CAD, CAM, e
Mecanismos.
SHILDT, HERBERT. C, Completo E Total – 3ª
edição Revista e Atualizada. Makron Books, 1996.
ARDUINO, www.arduinocc, acesso em 24 de
novembro de 2014.
LV-MAXSONAR-EZ SERIES, MAXBOTIX INC.
Copyright 2005 – 2012 MaxBotix Incorporated,
Patent 7.679.996.
SOLID
EDGE
www.solidedgeu.com,
Dezembro de 2014.
UNIVERSITY,
Acesso em 1 de
BIOGRAFIA DOS AUTORES
André L. Monteiro é graduando
em Mecatrônica, entrou no Instituto
Federal do Ceará em 2011 com
previsão de conclusão em 2015.
Atualmente,
trabalha
com
estagiário na Vicunha Textil. Suas
áreas de interesse são sistemas de controle distribuído
e instrumentação.
Revista INNOVER, volume 1, número 4, Dezembro 2014
105