1
Controle Eletrônico Para Reguladores de Tensão Indutivo Operando em Fluxo Inverso
A. L. C. Araújo*, P.R.C. Araújo*, J. L. Dantas*, R. C. P. Marques*, J. V. Cruz*, G. Silveira**1
Resumo- Muitas concessionárias de energia possuem reguladores de tensão de 13,8KV antigos, que permitem a regulação de
tensão em apenas um sentido, da fonte para carga. Em muitas
manobras da rede elétrica, há a possibilidade do fornecimento
de energia pelo lado da carga. Logo, seria necessário que o regulador de tensão oferecesse regulação de tensão também em
sentido reverso. Para as concessionárias de energia, a troca de
todos os reguladores de tensão antigos por reguladores bidirecionais novos seria bastante oneroso. Este trabalho apresenta
uma solução barata e segura para permitir que os reguladores
de tensão unidirecionais possam fazer regulação de tensão em
sentido reverso.
Palavras-chave—Regulador Indutivo, Fluxo Inverso, Fuzzy,
Controle.
I. INTRODUÇÃO
Nas ações da QEE (Qualidade de Energia Elétrica), destaca-se a disseminação de medidas de controle que visam garantir a conformidade dos produtos e serviços oferecidos
pelas concessionárias de energia elétrica.
Um importante exemplo deste controle está na necessidade
de instalação de determinados equipamentos, diretamente
conectados ao sistema elétrico de potência, capazes de adequar a tensão elétrica para níveis pré-estabelecidos pelos
contratos ou pelas agências reguladoras (p.e ANEEL).
Os dispositivos mais utilizados na Distribuição Elétrica
são os reguladores indutivos e capacitvos, sendo que o primeiro oferece mais recursos de regulação e proporciona extrema vantagem em relação ao do tipo capacitivo, quando
aplicado à alimentadores de distribuição com o propósito de
regular a tensão da carga.
No entanto, os reguladores indutivos instalados nas redes
de distribuição do sistema elétrico com vida útil acima de
cinco anos, não possuem o recurso de regulação bidirecional, ou seja, só operam adequadamente apenas sob fluxo
direto de corrente elétrica. Caso contrário, quando a rede é
alimentada de retorno (sentido inverso) devido a ocorrência
de uma falta, exige que os reguladores sem tal recurso, sejam isolados ("by-pass") da rede elétrica inibindo totalmente a regulação de tensão quando mais se precisa dela. Nesta
condição extraordinária, além do prejuízo no item da Conformidade do Produto citado acima, também se tem uma
influência negativa no item de continuidade do serviço, devido principalmente o tempo adicional das manobras de
transferências das cargas com a inclusão do "bypass" em
reguladores.
1
Este trabalho foi apoiado integralmente pela COELCE através do
Programa de Pesquisa de Desenvolvimento.
* Pesquisadores do CEFET-CE/ITTI
** Pesquisador da COELCE
As concessionárias de energia, e em especial a COELCE,
ainda possuem um grande número desses reguladores, que
são ineficientes em uma regulação em sentido reverso, da
carga para a fonte. A solução para resolver o problema da
regulação bidirecional de tensão deste tipo de regulador deve obedecer requisitos de custo e operacionalidade. Os custos devem ser menores do que a troca por um regulador com
essa funcionalidade e deve ser levado em consideração, uma
grande quantidade de reguladores espalhados em sua rede de
média tensão, em todo o estado do Ceará. A solução deve
ser de fácil implantação, visto a necessidade de sua instalação em reguladores já instalados na rede de média tensão. O
que esse trabalho propõe é uma solução de custo reduzido e
confiável para permitir que um regulador de tensão unidirecional de 13,8KV possa fazer regulação de tensão em sentido reverso, tornando-o um regulador bidirecional. Uma eletrônica embarcada, de baixo custo e com técnicas de lógica
fuzzy, foi desenvolvida para permitir que o regulador de
tensão fizesse regulação de tensão, de maneira confiável, em
sentido reverso.
II. CARACTERÍSTICAS
Um regulador de tensão é um auto-transformador que
possui um conjunto de taps para selecionar o número de
espiras no secundário. Um TP (Transformador de Potencial),
na saída do regulador, mede constantemente a tensão e a
compara com uma tensão de referência. Quando há a necessidade de correção da tensão, um trocador de posições, acionado por um motor, aumenta ou diminui a tensão mediante
degraus de 1,5 ou 2,5%. Esses degraus estão relacionados ao
número de espiras presentes em cada tap. O trocador de posições tem seis contatos estacionários e um rotor com três
contatos. Os contatos do rotor são interligados por resistores
para que se possam trocar posições sem interrupção do circuito. O controle eletrônico do Auto-booster é baseado em
eletrônica linear [5].
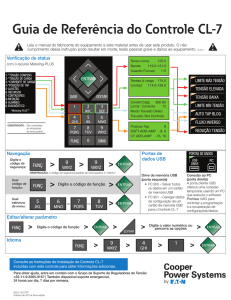
No caso do regulador unidirecional, o motor sempre rotaciona no mesmo sentido, a fim de elevar o número de espiras, e, por conseqüência, aumentar a tensão de saída. Na
Figura 1, é apresentado um diagrama do regulador.
2
Figura 1. Diagrama de um regulador de tensão.
A principal desvantagem do regulador de tensão Autobooster é o fato dele ser unidirecional, caso seja necessário
mudar o sentido do fluxo de energia é necessário o uso de
um “bypass”, porém esta manobra anula a capacidade de
regulação de tensão da linha de distribuição.
III. SOLUÇÃO PARA REGULAÇÃO DE TENSÃO EM SENTIDO
REVERSO
No caso de acionamento reverso, em que a saída passa a
ser a entrada e vice-versa, o número de espiras no secundário deve ser menor ou igual ao número de espiras no primário. Ou seja, o motor deverá rotacionar em sentido inverso
para que o número de espiras no secundário diminua. Logo,
no caso de uma operação inversa do regulador, podemos
fazer com que a polaridade do motor seja invertida, possibilitando seu acionamento em sentido inverso.
Esta seção é dedicada para descrever a solução para o
problema de regulação. A subseção A descreve a modelagem formal da solução em Redes de Petri enquanto que as
subseções seguintes tratam da implementação da solução.
A. Modelagem em Redes de Petri para o Sistema Controlador de Fluxo Inverso
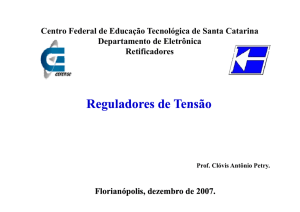
Na Figura 2, é apresentado um modelo em Redes de Petri para o sistema controlador de fluxo inverso do regulador
de tensão unidirecional. Observa-se que o modelo utiliza a
Rede de Petri PT (Place – Transition) [6], devido à simplicidade de funcionamento do sistema em si. O software utilizado para simular o modelo em Redes de Petri foi o Visual
Object Net ++, versão 2.0. Pela simulação, observaram-se
algumas características importantes, tais como: a rede é inicializável e não apresenta nenhum tipo de bloqueio em sua
execução.
Figura 2. Modelo em Rede de Petri para o sistema controlador de fluxo
inverso do regulador de tensão unidirecional.
Na Figura 2, fichas no lugar P1 representam o sistema
em estado de monitoramento de tensão e monitoramento do
sentido do fluxo de potência. O disparo da transição T1 representa uma inversão no sentido do fluxo de potência no
regulador. Uma ficha vai para o lugar P2, representando o
estado de amostragem de tensões e confirmação da inversão
do fluxo de potência. O disparo da transição T2 representa o
evento de operação dos relés de comutação de TPS, que
comuta o TP do lado da carga pelo TP do lado da fonte.
Uma ficha em P3 representa o estado de monitoramento da
tensão do TP do lado da fonte para efeito de regulação. O
disparo de T3 representa o evento de operação dos relés que
comutam os terminais do motor comutador de taps. Essa
inversão dos terminais do motor comutador permite que o
motor rotacione em sentido contrário, permitindo que o número de espiras do primário, agora lado da carga, seja maior
que o número de espiras do secundário, agora lado da fonte.
Assim, consegue-se uma elevação de tensão em sentido reverso. Uma ficha em P4 representa estado de operação do
motor, caso haja necessidade de regulação de tensão. O disparo de T4 representa retorno ao estado de monitoramento.
O disparo da transição T5 representa uma detecção do retorno ao sentido do fluxo de potência normal do regulador, da
fonte para carga. Uma ficha vai para o lugar P5, representando o estado de amostragem de tensões e confirmação do
retorno ao sentido do fluxo de potência normal do regulador.
O disparo da transição T6 representa o evento de operação
dos relés de comutação de TPS, que comuta o TP do lado da
fonte pelo TP do lado da carga. Uma ficha em P6 representa
o estado de monitoramento da tensão do TP do lado da carga
para efeito de regulação. O disparo de T7 representa o evento de operação dos relés que comutam os terminais do motor
comutador de taps. Essa inversão dos terminais do motor
comutador permite que o motor rotacione em sentido normal, permitindo que o número de espiras do primário seja
menor que o número de espiras do secundário. Assim, consegue-se uma elevação de tensão em sentido normal. Uma
ficha em P7 representa estado de operação do motor, caso
haja necessidade de regulação de tensão. O disparo de T8
representa retorno ao estado de monitoramento.
3
B. Métodos de Detecção de Valor de Tensão na Entrada do
Regulador.
Duas soluções foram desenvolvidos para este projeto. A
primeira é a utilização de um TP na entrada do regulador
(agora saída na operação inversa) para monitorar a tensão.
Essa solução já é nos reguladores, que possuem internamente em sua saída.
Essa solução possui a vantagem de operar com bastante
estabilidade e confiabilidade de operação. Entretanto, se os
custos forem o fator principal na solução, a solução com TP
pode ser proibitivo.
Uma segunda solução seria um medidor de tensão resistivo. Para esta solução é necessário uma transformação de
tensão de 13.8KV para aproximadamente 138V utilizando
uma relação de 1/100. A Figura 3 apresenta um esquema
elétrico do divisor de tensão utilizado no regulador de tensão.
quadro de valores apresentado no canto inferior direito da
simulação.
Essa solução foi implementada utilizando resistores e isoladores por meio de uma resina e colocado dentro de um
tubo de PVC. A figura 5 mostra o detalhe da construção.
As vantagens da solução se relacionam ao baixo custo da
implementação quando comparado ao um TP. Entretanto,
devido as características de tolerância individual de cada
resistor que compõe o dispositivo, ajustes são necessários
para cada unidade, tornando sua confiabilidade um ponto
negativo dessa solução.
Figura 5. Protótipo de um medidor de tensão encapsulado em um tubo de
PVC.
C. Metodologia para o Desenvolvimento do Controle de
Inversão de Fluxo de Regulador de Tensão
Figura 3. Esquema elétrico do divisor de tensão utilizado no regulador.
A tensão de saída desse medidor, a qual será utilizada pelo regulador de tensão, é a tensão observada sobre o resistor
R20. Essa tensão equivale a 1/100 da tensão aplicada no
medidor. Na Figura 2, a fonte V1 representa a tensão da rede
de média tensão.
Na Figura 4, é apresentada uma simulação do medidor de
tensão. A simulação foi baseada no circuito da Figura 4, e
utilizou uma tensão total aplicada de 13.800V.
Figura 4. Simulação, utilizando o PSPICE, do medidor de tensão.
Na Simulação, apresentada na Figura 4, observa-se que a
máxima tensão sobre o resistor R20 é de 138V, ou seja,
1/100 da tensão total aplicada. Esse valor é observado no
A solução proposta deverá ser capaz de reconhecer a inversão da alimentação do regulador; alterar a polaridade do
motor; e alterar o monitoramento do TP do lado da carga
pelo monitoramento do TP do lado da fonte. A solução será
constituída por uma placa de controle, que ficará instalada
dentro da caixa de distribuição e controle do regulador, e
por um TP (Transformador de Potencial), que ficará localizado na parte de fora do regulador.
Para regulação de fluxo de potência inverso é necessária a
medição da tensão no lado da fonte. Nos reguladores antigos, não há um TP no lado da fonte, sendo necessário a introdução de um TP ou de um medidor de tensão. No nosso
caso, optamos pela utilização de um TP.
O TP introduzido servirá para monitorar a tensão no lado
da fonte, que no fluxo inverso passa a ser a tensão no lado
da carga, para ser comparada com a tensão de referência do
controlador. Na detecção do fluxo inverso, o circuito controlador de fluxo inverso terá que comutar, através de relés
de estado sólido, o TP do lado da carga pelo TP do lado da
fonte. Na Figura 6, é apresentada essa funcionalidade. Outra
funcionalidade do controlador de fluxo inverso, apresentada
na Figura 7, é a inversão dos terminais do motor CA do comutador de taps. Essa inversão será baseada na comutação
de relés, para trocar o terminal 2 pelo terminal 3 do motor, e
vice-versa.
4
Figura 6. Funcionalidade de comutação de TPs.
Observa-se que a funcionalidade do circuito controlador
de fluxo inverso será a de monitorar a inversão de fluxo, e,
se positivo, comutar o TP do lado da carga pelo TP do lado
da fonte, e inverter os terminais do motor CA do comutador.
Na Figura 8, é apresentado um diagrama de blocos da funcionalidade do controlador de fluxo inverso.
Figura 9. Diagrama de blocos com todas as partes integrantes do controlador de fluxo inverso.
Na Figura 9, observa-se o detector de fluxo inverso, o
qual é representado pelos detectores de passagem por zero
de precisão e por uma funcionalidade do controlador de fluxo inverso, representado essencialmente pelo microcontrolador PIC.
D. Metodologia para Detecção de Inversão do Fluxo de
Potência no Regulador.
Figura 7. Funcionalidade de inversão dos terminais do motor comutador de
taps.
1) Ângulo de Potência
O sentido do fluxo de energia ativa entre duas fontes de
correntes alternadas ligadas através de uma impedância, Figura 10, é determinado pelo ângulo de defasagem das tensões dessas duas fontes, Figura 11. Na verdade, para se saber o sentido do fluxo de energia em uma impedância determina-se o ângulo de defasagem das tensões nos terminais
dessa impedância em relação a um ponto comum. O citado
ângulo é chamado ângulo de potência[4].
Figura 10. Duas fontes CA
Figura 8. Diagrama de blocos da funcionalidade do controlador de fluxo
inverso.
Na Figura 8, é apresentado um diagrama de blocos
com todas as partes integrantes do controlador de fluxo inverso utilizado nessa solução. Na verdade, o detector de
fluxo inverso é integrado ao controlador, através de uma
funcionalidade executada pelo microcontrolador.
Figura 11. Fasores das tensões
5
Na equação (1), é mostrada a equação da potência ativa
através da reatância XL
P=
Vs .Vr .sen(δ )
XL
(1)
Sendo δ o ângulo de potência. A teoria do ângulo de potência, muito difundida e aplicada em sistemas elétricos,
pode também ser evidenciada em trabalhos de eletrônica de
potência, quando se deseja injetar energia na rede elétrica,
em um reciclador de energia para testes de burn-in em fontes
CA, no qual o controle da potência ativa e reativa injetados
são feitos através da imposição de um ângulo de potência
desejado[1][2][3].
2) Aplicação em Reguladores de Tensão de Redes de
Distribuição
Podemos em uma análise simplificada, considerar que o
primário e o secundário do regulador de tensão estão ligados
por uma reatância, não nos interessando o valor da tensão
em si, mas o valor do ângulo de potência, que tende a ser
muito pequeno, neste caso. No entanto, com apoio de um
sistema embarcado microcontrolado, podemos identificar o
ângulo de potência e saber se ele é positivo ou negativo.
Para determinação do ângulo de potência usaremos, como
referência, o secundário do TP de um dos lados do regulador. Identificaremos sua passagem pelo zero de tensão. Sabendo-se o tempo gasto para que o outro lado do regulador
cruze o nível zero de tensão, determina-se o ângulo de potência e assim o sentido do fluxo de energia.
3) Detector de Passagem por Zero de Precisão
Para medirmos a defasagem entre as duas ondas de tensão
utilizaremos dois circuitos detectores de passagem por zero.
Devido ao fato do ângulo de potência ser muito pequeno, é
necessário que esses circuitos sejam de precisão. Na Figura
12, temos um circuito detector de passagem por zero de precisão, desenhado em um simulador. A precisão é conseguida
pelo CI LM339 e principalmente pelo diodo rápido 1N4148.
Figura 12. Detector de passagem por zero
Figura 13. Identificação da passagem por zero.
O sinal identificador da passagem pelo zero de tensão é
tratado em um Microcontrolador PIC e um firmware calcula
o sentido do fluxo de energia.
O sinal de tensão do secundário será pego de um TP
13800/120V, e o do primário por um TP a ser instalado. Na
Figura 13, é apresentado um gráfico mostrando os sinais de
detecção de passagem por zero, juntamente com os sinais
alternados monitorados.
E. Uso de sistemas inteligentes para controle da regulação
inversa
O uso de técnicas de inteligência artificial, justifica-se devido à existência de um padrão de comportamento do sistema e a incerteza em quantificar este comportamento[8]. O
sistema apresenta uma defasagem mensurável entre as formas de onda do primário e do secundário do autotransformador, porém uma análise simplista das amostras de tensão
obtidas, pode levar a erros graves, dada a existência de fenômenos que possam, momentaneamente, invalidar as amostras realizadas[7].
1) Amostragem e quantificação da defasagem
O esquema consiste em utilizar dois conversores analógico-digitais (AD’s), um em cada lado do circuito de teste,
sendo utilizada uma taxa de aproximadamente 2400 amostras por segundo para cada A/D. Esta quantidade de amostras é suficiente para evitar distorções indesejadas, causadas
pelo processo de digitalização.
Uma primeira análise dos sinais adquiridos (S1 e S2) mostrou que, em alguns instantes de tempo, a defasagem entre as
formas de onda não pode ser observada corretamente. Isto
pode ser atribuído à defasagem entre os A/D’s e/ou oscilações na tensão.
Este problema foi contornado tomando como medida de
defasagem o erro médio (Em) entre as duas formas de onda
digitalizadas. O esquema do sistema discreto é mostrado na
Figura 14.
6
E[n]
∑E[n]
S1[n]
-
+
Em[n]
+
S2[n]
1/n
O sistema pode ser implementado pelo seguinte trecho de
programa (em C):
(função de aquisição do AD1(tp0))/255;
(função de aquisição do AD2(tp1))/255;
Es + (S1-S2);
Es/n;
if n>5 //Espera as primeiras amostras
{
//para o erro estabilizar
//
//***********
//* Inserir aqui rotina de IA
//* e rotinas de controle
//***********
}
}
A função acima considera uma amostragem no mesmo intervalo de tensão, caso isto não ocorra deve-se inserir uma
constante multiplicando o valor lido pelo AD do lado de
baixa tensão do autotransformador.
A cada cálculo do erro médio, seu valor deve ser submetido à rotina de IA, que analisando o valor do erro, determina
qual o sentido do fluxo de potência, cuja informação será
utilizada nas rotinas de controle.
2) Sistema de Inteligência Artificial: Solução utilizando
Lógica Fuzzy
O controlador fuzzy baseia-se na tomada de decisão por
meio do valor de erro-médio (Em), utilizando lógica fuzzy.
A utilização deste tipo de sistema justifica-se pela incerteza
do momento e valor exato no qual ocorre a mudança de fluxo, com base nos testes realizados, chegou-se ao seguinte
modelo de sistema.
a) Variável de entrada: Erro médio (Em)
b) Variável de saída:
Sentido do fluxo de potência (F)
c) Universo de discurso:
Entrada............Em = {negativo, nulo, positivo}
Saída................F = {direto, indeterminado, inverso}
Quantização....x = {-5,-4,-3,-2,-1,0,1,2,3,4,5}
d) Funções de pertinência:
f(Em)
positivo
Z-1
Figura 14. Controle da Amotragem de Leituras.
Es = 0;
n = 1;
while (1)
{
S1 =
S2 =
Es =
Em =
n++;
negativo
Figura 15. Função de transferência do Erro Médio
f(F)
direto
inverso
Figura 16. Função de transferência do Sentido do Fluxo de Potência
e) Regras de inferência:
R1: Se o erro é negativo, o fluxo é direto (fonte→
carga).
R2: Se o erro é positivo, o fluxo é inverso (carga→
fonte).
f) Desfuzificação
A saída de um sistema nebuloso consiste de uma função
de pertinência representativa da saída (fs), sendo assim é
necessário o processo de desfuzificação, o qual gera um número que representa este conjunto. O método escolhido foi o
do centro de gravidade, seguido por uma limiarização em
zero.
y=
∑ ( x ⋅ fs)
∑ ( fs)
(2 )
A limiarização por zero foi utilizada para simplificar o espaço de resposta, sendo:
Se y<0 → F=-1 (fluxo direto)
Se y>0 → F=1 (fluxo inverso)
Se y=0 → F=0 (fluxo indeterminado)
Um fluxo indeterminado significa que não se pode especificar o sentido do fluxo de potência naquele instante, considerando-se assim um o estado inalterado de todas as variáveis.
7
VIII. METODOLOGIA DE VALIDAÇÃO DO CONTROLADOR DE
FLUXO INVERSO DE POTÊNCIA DO REGULADOR
Os primeiros testes foram realizados utilizando um simulador de circuitos chamado PROTEUS 6.02. As simulações
foram realizadas para avaliar a precisão na detecção de
ntsagem por zero de dois sinais colhidos em dois pontos
de um circuito que possuía um sentido de fluxo de potência.
As simulações mostraram que o circuito da Figura 8 apresenta uma ótima precisão na detecção de passagem por zero
de um sinal de 220 Vac. Posteriormente, foram montados,
em protoboard, dois circuitos detectores de passagem por
zero, como o detector da Figura 8. E as saídas desses dois
detectores foram aplicadas às entradas de um microntrolador
PIC 16f628. Foram aplicados dois potenciais elétricos, colhidos em pontos diferentes de uma associação série de lâmpadas, às entradas desses dois detectores. Esse teste foi realizado para analisar se o microcontrolador PIC reconhecia a
defasagem dos dois potenciais elétricos. Esses testes foram
bem sucedidos. O PIC reconheceu, de maneira confiável, a
defasagem dos potenciais elétricos, e, por conseqüência, o
sentido do fluxo de potência. Na Figura 13, é apresentado
um diagrama de blocos representando esse teste. Pela Figura, observa-se que se alimentação da associação série de
lâmpadas for como o indicado, o sentido de fluxo de potência estará da esquerda para a direita. Logo, o potencial elétrico inserido no microcontrolador PIC, do lado esquerdo,
está adiantado em relação ao potencial elétrico inserido no
PIC, do lado direito. Pelos testes realizados em bancada, o
PIC detectou confiavelmente essa defasagem. Posteriormente, foi invertida a alimentação da associação série, fazendose com o fio fase fosse inserido no lado direito e o fio neutro
fosse inserido no lado esquerdo. Assim, inverteu-se o sentido do fluxo de potência, fazendo-se com que o potencial do
lado direito tivesse adiantado em relação ao potencial do
lado esquerdo. Pelos testes realizados em bancada, o PIC
detectou confiavelmente essa defasagem, e, por conseqüência, a inversão do fluxo de potência.
Figura 13. Diagrama de blocos representando o teste do sentido do fluxo de
potência.
Com o sucesso do teste em protoboard, foi realizada a
confecção da placa de circuito impresso completa, já com os
relés para comutação dos terminais do motor e para comuta-
ção entre os TPs do lado da carga e do lado da fonte. A validação atual ainda está sendo realizada em nível de bancada,
apresentando operação segura e confiável, e por um período
muito longo de operação. Na Figura 14, é apresentada uma
fotografia de um ensaio realizado em bancada.
Figura 14. Fotografia de um ensaio realizado em bancada.
A. Codificação do sistema para teste do controlador de fluxo inverso
Na Figura 15, é apresentado um diagrama de blocos da
codificação do sistema microntrolado do controlador de inversão de fluxo do regulador de tensão. Pela Figura, observa-se como estado inicial o sentido de fluxo original, que é
da fonte para carga. Nesse caso, inicia-se com o monitoramento de tensão pelo TP do lado da carga. O circuito detector de passagem por zero, desenvolvido para o sistema microcontrolado, fica monitorando as passagens por zero da
tensão coletada do TP e da tensão coletada do medidor de
tensão. Caso verifique-se uma amostragem constante e no
sentido de fluxo de potência da fonte para carga, então mantém-se o estado dos relés que comuta do TP para o medidor
de tensão e que comuta os terminais do motor comutador em
OFF. Ou seja, esses relés devem ser mantidos desativados
para regulação de tensão no sentido de fluxo de potência da
fonte para carga. Caso verifique-se uma amostragem constante e no sentido de fluxo de potência da carga para fonte,
então altera-se o estado dos relés que comuta do TP para o
medidor de tensão e que comuta os terminais do motor comutador para ON. Ou seja, esses relés devem ser mantidos
ativados para regulação de tensão no sentido de fluxo de
potência da carga para fonte.
No caso de uma amostragem inconstante, observada geralmente quando um dos lados ou os dois não possuem potência, percebe-se, no diagrama, que nenhuma operação é
realizada, retornando-se ao estado de amostragem de passagem por zero.
8
Figura 15. Diagrama de Blocos da Codificação do Controlador de Inversão
de Fluxo de Potência.
O programa é responsável em avaliar amostragens e decidir pelas operações dos relés que comutam o TP da carga
pelo medidor de tensão do lado da fonte e que comuta os
terminais do motor comutador dos taps, por um escopo de
uma interrupção da porta B, que detecta qual passagem por
zero aconteceu primeiro, e um escopo de uma interrupção de
timer, para criar uma base de tempo para o programa.
IX. CONCLUSÃO
O desenvolvimento do projeto do circuito controlador de
fluxo inverso de potência para reguladores unidirecionais foi
um grande desafio, pois se buscou constantemente baixo
custo, sem perder uma característica essencial: a confiabilidade na operação do regulador de tensão. Outras características tiveram que ser observadas, como a dimensão da placa
do controlador de fluxo inverso de potência e a imunidade a
interferências geradas por transientes na rede elétrica. Para a
solução dimensional, procurou-se minimizar ao máximo o
tamanho da placa de circuito impresso, buscando técnicas
específicas de roteamento de placas. E pelos ensaios já realizados em campo, a placa do controlador desenvolvido encaixa-se perfeitamente na caixa de controle e distribuição do
regulador. Para solução de interferências da rede elétrica,
buscou-se uma filtragem redundante na alimentação da placa
do controlador. Essas e outras características de projeto
permitiram o desenvolvimento de um controlador que possibilita, de maneira confiável e segura, a regulação de tensão
no sentido inverso do fluxo de potência.
X. REFERÊNCIAS BIBLIOGRÁFICAS
[1] Ming-Tsung Tsai and Charles Tsai, "Energy Recycling
for Eletrical AC Power Burn-In Test," IEEE Trans. On
Industrial Electronics, vol. 47, No. 4, August. 2000.
[2] Chin-E Lin, Ming-Tsung Tsai, Wen-Inne Tsai and
Ching-Lien Huang, “Consumption Power Feedback
Unit for Power Electronics Burn-In Test”, IEEE Trans.
On Industrial Electronics, vol. 44, No. 2, April. 1997.
[3] J. L. Dantas, F. Antunes, K. Lima , "High Efficiency
Recycler for Burn –in Tests of Telecomunications
Source," apresentado na VI Induscon, Joinville, Brasil,
2004.
[4] J. L. Dantas, "Reciclador de Energia para Testes de
Burn-In em Fontes CC para Telecomunicações," Disseratção de Mestrado, Dept. Eng. Elétrica, Univ. Federal
do Ceará, 2006.
[5] PAIVA, J. P. S., “Redes de Energia Elétrica, uma análise sistêmica” IST Press, Portugal – 2005.
[6] MURATA, T. “Petri Nets: Properties, Analysis and
Applications”, Proceedings of the IEEE, Vol. 77, No. 4,
Abril de 1989.
[7] ŠIJAK, T et al. “Design of Fuzzy Regulator for Power
System
Secondary
Load
Frequency”
Control.Proceedings of the 10th Mediterranean Conferenceon Control and Automation - MED2002. Lisbon,Portugal, July 9-12, 2002.
[8] MENDEL, J.M. Fuzzy Logic Systems for Engineering:
A Tutorial. Proceedings of the IEEE, 1995. p 345-377.