Resumo
• O critério de oscilação
• Controlo de Amplitude Não Linear
• O oscilador Wien-Bridge
• O oscilador de deslocamento de Fase
• O oscilador de Quadratura
• O oscilador Filtro Activo Sintonizado
– p. 1/2
Geradores de Sinal e Circuitos Formatadores
de Ondas
Nos circuitos electrónicos existe frequentemente a necessidade de sinais com
formas de onda standard, por exemplo sinais sinusoidais, triangulares ou
quadrados.
Estes sinais podem ser necessários para fazer temporizações, para sistemas de
comunicação e teste e medida, entre muitas outras aplicações.
Existem duas formas distintas de geração de sinusóides.
A primeira utiliza uma malha de realimentação positiva consistindo num
circuito RC ou LC. A amplitude das ondas sinusoidais geradas é limitada
usando um dispositivo limitador não linear ou mesmo as não linearidades do
próprio circuito. Apesar disso estes circuitos que utilizam circuitos
ressonantes para gerar ondas sinusoidais são chamados de osciladores
lineares.
A outra forma de gerar ondas sinusoidais é gerar uma onda sinusoidal a partir
de uma onda triangular por formatação da mesma.
– p. 2/2
Geradores de Sinal e Circuitos Formatadores
de Ondas
Circuitos que geram formas de onda quadradas, triangular e impulsivas são
chamados osciladores não lineares ou geradores de funções e usam os
circuitos chamados Multivibradores. Existem três tipos de multivibrador:
biestável, astável e monoestável.
Os multivibradores a estudar empregam AmpOp e são utilizados para
aplicações analógicas de precisão.
Uma forma geral de gerar ondas triangulares ou quadradas é obtida ligando
um circuito biestável e um AmpOp integrador na malha de realimentação.
– p. 3/2
O critério de oscilação
A técnica desenvolvida
para o projecto
de osciladores sinusoidais
inclui dois passos: o
primeiro, linear, permite
utilizar um método
no domínio da frequência
através de análise de realimentação e o segundo que consiste em introduzir
uma não linearidade para controlar a amplitude.
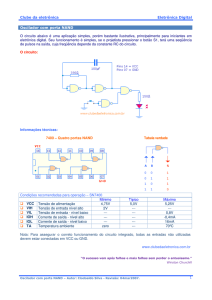
A estrutura básica dum oscilador sinusoidal consiste num amplificador
realimentado com uma malha dependente da frequência com realimentação
positiva como mostrado na figura.
Com realimentação positiva a equação do ganho é:
A(s)
A f (s) = 1−A(s)β(s)
– p. 4/2
O critério de oscilação
O ganho da malha é −A (s) β (s) mas para a análise seguinte é possível retirrar
o sinal menos
L (s) = A (s) β (s)
A equação característica (1) é a condição para a malha de realimentação
fornecer oscilação sinusoidal à frequência w0 (2) sendo:
1 − L (s) = 0 (1)
L ( jw0 ) = A ( jw0 ) β ( jw0 ) = 1(2)
Critério Barkhausen:Em w0 a fase do ganho da malha deve ser zero e o
módulo do ganho da malha deve ser unitário
Deve notar-se que para o circuito oscilar só a uma frequência o critério de
oscilação só pode satisfazer-se a uma frequência (ou o resultado não será uma
sinusóide).
É possível encontrar uma forma intuitiva para explicar o critério de
Barkhausen. Para este circuito produzir uma saída de frequência constante e
manter essa saída com uma entrada nula (xs = 0) o sinal realimentado é
x f = βxo que multiplicado por A produz novamente xo , então Ax f = xo e
Aβxo = xo ⇔ Aβ = 1
– p. 5/2
O critério de oscilação
A frequência de oscilação
w0 é determinada apenas pelas
características de fase da malha
de realimentação; a malha oscila
à frequência à qual a fase é
zero. A estabilidade da oscilação
é determinada pela forma
como a fase φ (w) varia com a
frequência. Uma fase φ (w) que
tem um declive acentuado em torno de 0◦ resulta numa frequência mais
estável. Isto pode ser analisado supondo uma variação δφ devido a uma
variação num dos componentes do circuito. Se dφ/dw é grande então a
mudança resultante em w0 será pequena.
Uma abordagem alternativa ao estudo de circuitos osciladores consiste em
analisar os pólos do circuito que são as raízes da equação característica. Para
o circuito produzir oscilações contínuas a equação característica tem que ter
as raízes s = ± jw0 . Por isso 1 − A (s) β (s) deve ter um factor s2 + w20 .
– p. 6/2
Controlo de Amplitude Não Linear
É necessário que |Aβ| > 1 para w = w0 para tomar em conta possíveis
variações de parâmetros que levem o circuito a não oscilar.
Nesta situação as oscilações crescem em amplitude sem limite. Por isso é
necessário um mecanismo para forçar |Aβ| = 1 para um determinado valor de
amplitude de saída.
Primeiro garante-se que as oscilações começaram, projectando o circuito de
forma a que |Aβ| seja ligeiramente superior a um. Isto corresponde a projectar
o circuito de forma que os pólos estejam no semi-plano s direito. Por isso
quando se ligar a fonte de alimentação as oscilações crescem em amplitude.
Quando a amplitude chega a um certo valor o circuito não linear provoca a
redução do ganho para 1. Desta forma os pólos passam para o eixo
imaginário.
– p. 7/2
Controlo de Amplitude Não Linear
Existem duas formas básicas para implementar o mecanismo não linear de
limitação de ganho.
A primeira utiliza um limitador. Permite-se que as oscilações cresçam até ao
limite pré-definido. Quando o limitador entra em funcionamento a amplitude
mantém-se estável.
O limitador de ganho deve ser suave, ou seja, não deve diminuir o ganho
duma forma abrupta para minimizar a distorção não linear.
Em termos práticos os limitadores são abruptos gerando ondas quadradas que
passam por uma malha de realimentação composta por um filtro passa-banda
que elimina as componentes de frequência não pretendidas obtendo-se
novamente a sinusóide.
Quanto maior o factor de qualidade Q do filtro menos harmónicos são gerados
da onda sinusoidal inicial.
– p. 8/2
Controlo de Amplitude Não Linear
O outro mecanismo para controlo de amplitude utiliza um elemento cuja
resistência pode ser controlada pela amplitude da onda de saída. É possível
colocar este elemento no circuito de realimentação de forma a garantir que a
resistência determine o ganho da malha da forma pretendida.
Díodos e JFETs a operar na região de tríodo são vulgarmente utilizados para
implementar um elemento cuja resistência é controlada por tensão.
– p. 9/2
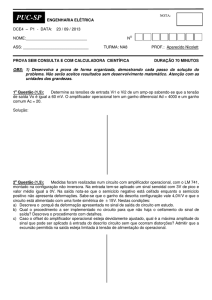
Um circuito para controlo de amplitude
Considerando que vI e vo são pequenos,
vA é positivo, vB é negativo e os díodos estão
ao corte, toda a corrente vI /R1 flui pela resistência
de realimentação R f . O ganho de tensão é:
R
v0 = − R1f vI
É possível analisar as tensões nos nós A
e B a partir de V e v0 por sobreposição obtendo-se:
R2
3
vA = V R2R+R
+
v
0
R2 +R3 (1)
3
R5
4
vB = −V R4R+R
+
v
0
R4 +R5 (2)
5
Quando vI fica positivo, vo torna-se negativo
e vB torna-se mais negativo mantendo D2 ao corte.
Continuando a aumentar vI vai-se atingir um valor negativo de vo que permite
que vA coloque D1 a conduzir.
– p. 10/2
Um circuito para controlo de amplitude
Considerando que o díodo está justamente
a começar a conduzir. Fazendo vA = −0.7 = −VD
a tensão vo a que isso acontece é (colocando
em (1) vA = −VD e resolvendo
em relação a vo )
L− = −V RR23 −VD 1 + RR32
O valor correspondente de vI pode ser encontrado
dividindo L− por −R f /R1 . Se vI é aumentado
além desse valor mais corrente é injectada
em D1 e vA permanece aproximadamente igual
a −VD . Por isso a corrente através R2 permanece
aproximadamente constante e a corrente adicional
no díodo flui através de R3 . Por isso R3 aparece em paralelo com R f e o ganho
incremental (ignorando a resistência do díodo) é − (R f k R3 ) /R1 . Para obter
um declive da função de transferência pequeno na região de limitação é
seleccionado um valor baixo de R3 .
– p. 11/2
Um circuito para controlo de amplitude
A característica de transferência para
vI negativo pode ser encontrado de forma idêntica.
Com vB = VD R4
R4
L+ = V R5 +VD 1 + R5
Finalmente, se R f for aumentado
obtém-se um ganho maior enquanto se mantêm
L+ e L− inalterados. No limite removendo R f
resulta na curva da figura que é de um comparador.
– p. 12/2
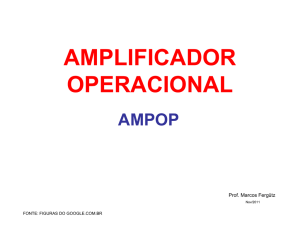
O oscilador Wien-Bridge
A figura mostra um oscilador
Wien-Bridge sem controlo
não linear de ganho. O circuito
consiste num amplificador
operacional em montagem não
inversora com ganho 1 + R2 /R1 .
Na malha de realimentação deste
amplificador com ganho positivo
está ligado
h umaimalha RC. O ganho da malha é então
1+R2 /R1
p
L (s) = 1 + RR12 Z p +Z
=
3+sCR+1/(sCR)
s
Substituindo s = jw
1+R2 /R1
L ( jw) = 3+ j(wCR−1/(wCR))
O ganho da malha será um número real (com fase zero) à frequência dada por:
1
w0CR = w01CR ⇔ w0 = CR
Z
– p. 13/2
O oscilador Wien-Bridge
Para obter oscilações continuadamente à frequência w0 = 1/(RC) é necessário
que o ganho da malha seja igual à unidade, logo:
R2
R1 = 2
Para as oscilações começarem R2 /R1 deve ser ligeiramente superior a dois.
Pode-se verificar que para essa situação as raízes da equação característica
1 − L (s) = 0 estarão no semiplano direito s. A amplitude de oscilação pode
ser determinada e estabilizada usando um limitador não linear de amplitude.
– p. 14/2
O oscilador Wien-Bridge
O limitador é idêntico ao apresentado
no acetato 10. No pico positivo
da tensão de saída vo , a tensão no nó
b excederá a tensão v1 (que é cerca de
vo /3) e o díodo D2 conduz. Isto cortará
o pico positivo num valor determinado
por R5 , R6 e a tensão negativa. O
valor do pico de saída positivo pode ser
calculado por vb = v1 +VD2 e aplicando
a lei dos nós em b, desprezando a
corrente de D2.
O valor do pico negativo pode ser determinado por va = v1 −VD1 e escrevendo
a equação dos nós do nó a, desprezando a corrente em D1. Para se obter uma
onda simétrica R3 é escolhida igual a R6 e R4 igual a R5 .
– p. 15/2
O oscilador Wien-Bridge
Método alternativo de estabilização
O potenciómetro P é
ajustado até as oscilações começarem a
crescer. Quando as oscilações crescem
os díodos começam a conduzir fazendo
o ganho diminuir para um. A amplitude
de saída pode ser variada ajustando
o potenciómetro P. A saída é tirada
no ponto b uma vez que tem menos
distorção do que em a. Deve notar-se
que a tensão em b é proporcional à
tensão nos terminais de entrada do AmpOp e aí o sinal (de a) já foi filtrado
pela malha RC. Por o nó b ser um nó de alta impedância será preciso um
buffer para fornecer a onda a uma carga.
– p. 16/2
O oscilador de deslocamento de Fase
Este oscilador
consiste num
amplificador com
ganho negativo com
um circuito RC de
três secções na malha
de realimentação. O
circuito irá oscilar à frequência em que a fase do circuito RC seja 180◦ . A
razão de usar uma tripla rede passiva RC é o número mínimo de secções que é
capaz de fazer um deslocamento de fase de 180◦ a uma frequência finita.
Para as oscilações serem mantidas, o valor de K deve ser igual ao inverso do
ganho da tripla rede passiva à frequência de oscilação. Mas para as oscilações
começarem o valor de K deve ser ligeiramente maior que esse valor.
– p. 17/2
O oscilador de deslocamento de Fase
A figura mostra
o oscilador de deslocamento
de fase com um limitador
na malha de realimentação.
A ganho da malha é dada por
Vo ( jw)
Vx ( jw)
w2C2 RR f
4+ j(3wCR−1/(wCR))
Aβ =
=
Para começar a oscilar R f
tem que ser ligeiramente maior
que o mínimo valor requerido.
Apesar do circuito estabilizar
mais rapidamente e gerar ondas
sinusoidais mais estáveis com
R f ainda maior, nessa situação
há mais distorção harmónica.
– p. 18/2
O oscilador de Quadratura
O
amplificador 1 está ligado
como um integrador
com um limitador
na realimentação para
controlo de amplitude.
O amplificador
2 está ligado como um
integrador não inversor.
Para compreender a
operação deste integrador
não inversor considere o
circuito equivalente mostrado em (b). Este é o circuito equivalente na entrada
no segundo AmpOp.
– p. 19/2
O oscilador de Quadratura
A relação entre vo2 e v é v = vo2 /2. Pelo teorema de Miller é possível
decompor R f na entrada sendo R f /(1 − 2). Obtém-se uma resistência
negativa −R f . Se R f for igual a 2R o paralelo de −R f com 2R em (b) dá uma
resistência infinita, ficando o circuito equivalente apenas composto por uma
fonte de corrente e um condensador. Então:
R
vO2
1 t vO1
v = 2 = C 0 2R
A onda vO2 é uma onda sinusoidal mais pura que vO1 pois no primeiro
integrador existe limitação de amplitude e no segundo integrador a onda é
filtrada.
O ganho da malha é
L (s) = VVo2x = − s2C12 R2
Por isso o circuito oscilará em
1
w0 = CR
O nome de oscilador de Quadratura resulta do circuito fornecer duas
sinusóides em quadratura (diferença de 90◦ ).
– p. 20/2
O oscilador Filtro Activo Sintonizado
O circuito consiste
num filtro passa-banda
de factor de qualidade
elevada ligado numa
malha de realimentação
positiva com
um limitador abrupto.
Considerando que as
oscilações já começaram, a saída do filtro passa banda será uma onda
sinusoidal cuja frequência é igual à frequência central do filtro f0 . A onda v1 é
fornecida ao limitador que produz uma onda quadrada cujos níveis são
determinados pelos níveis limite. A onda quadrada é então fornecida ao filtro
passa-banda que filtra os harmónicos e fornece uma saída sinusoidal v1 com a
frequência f0 .
– p. 21/2
O oscilador Filtro Activo Sintonizado
A pureza da onda de saída será função directa da selectividade (ou factor de
qualidade Q) do filtro passa banda.
Existe controlo independente da frequência, amplitude e distorção da
sinusóide de saída.
Qualquer filtro com ganho positivo pode ser usado.
A estabilidade em frequência do oscilador é determinada pela estabilidade em
frequência do filtro passa-banda.
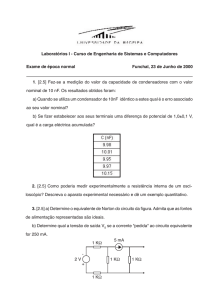
O circuito do acetato seguinte implementa um filtro desse tipo. R1 , D1 e D2 é
o circuito limitador. O circuito restante é um filtro activo passa-banda que será
estudado mais tarde.
– p. 22/2
O oscilador Filtro Activo Sintonizado
– p. 23/2
Conclusão
Os Circuitos Osciladores RC com OpAmps são úteis para operação desde os
10Hz aos 100KHz (no máximo 1MHz).
O limite inferior é determinado pelo tamanho dos componentes passivos
requeridos; o limite máximo é determinado pelas limitações de resposta em
frequência e slew-rate dos amplificadores operacionais.
Para frequências mais elevadas são usados circuitos com transístores
juntamente com circuitos sintonizados LC ou cristais.
– p. 24/2