PROJETOS DE INVERSORES Prof. Ivo Barbi Este documento reúne relatórios escritos pelos atuais professores, Telles B. Lazzarin Romeu Hausmann Hugo S. Larico Glayson Luiz Piazza quando cursaram a disciplina “Projetos de Inversores” que ministrei no Programa de Pós‐graduação em Engenharia Elétrica da UFSC, nos anos de 2007 e 2008. Departamento de Engenharia Elétrica
Centro Tecnológico
UNIVERSIDADE FEDERAL DE SANTA CATARINA
PROJETO DE INVERSOR MONOFÁSICO
Acadêmicos:
Hugo Estofanero
Romeu Hausmann
Telles B. Lazzarin
Professor: Ivo Barbi
Maio/2007
Instituto de Eletrônica de Potência
1
Projetos de Inversores Monofásicos
_______________________________________________________________
Índice
1. Introdução ................................................................................................................................... 5
2. Estudo do Inversor de Tensão Monofásico ................................................................................ 7
2.1. Inversor de Tensão Monofásico .......................................................................................... 7
2.2. Estratégias de Modulação .................................................................................................... 8
2.3. Etapas de operação .............................................................................................................. 9
2.4. Projeto do filtro LC ........................................................................................................... 12
2.4.1. Cálculo do Indutor Lf ................................................................................................. 12
2.4.2. Cálculo da Capacitância Cf ........................................................................................ 16
2.5. Simulação de um Inversor Monofásico de 10kVA ........................................................... 17
3. Modelo Matemático do Inversor para a Malha de Tensão ....................................................... 21
3.1. Projeto do compensador .................................................................................................... 26
3.2. Simulação com o Compensador de Tensão ....................................................................... 31
4. Restrição da Derivada do Sinal de Controle............................................................................. 40
4.1. Simulação para a Restrição da Derivada do Sinal de Controle ......................................... 46
5. Inversor Monofásico Alimentando uma Carga Não Linear ..................................................... 48
5.1. Resultados de Simulação com Carga Não-Linear ............................................................. 53
5.1.1. Carga não-linear – retificador com fonte de tensão.................................................... 53
5.1.2. Carga não-linear – retificador com filtro capacitivo .................................................. 56
5.1.3. Carga não-linear com alteração de Lo (35µH) ........................................................... 58
5.1.4. Carga não-linear com alteração de Lo (15µH) ........................................................... 60
6. Estudo de Perdas....................................................................................................................... 65
6.1. Estudo das Perdas nos Semicondutores............................................................................. 65
6.1.1. Perdas por Condução. ................................................................................................. 65
6.1.2. Perdas por Comutação ................................................................................................ 67
6.1.3. Perdas Totais nos Semicondutores do Estágio de Potência de um Inversor
Monofásico .................................................................................................................................... 72
6.2. Dimensionamento Térmico – Exemplo de Projeto ........................................................... 73
7. Introdução ao Estudo do Paralelismo de Inversores................................................................. 76
7.1. Problema da operação em paralelo de inversores.............................................................. 76
Instituto de Eletrônica de Potência
2
Projetos de Inversores Monofásicos
_______________________________________________________________
7.2. Estudo Matemático do Paralelismo de Inversores............................................................. 78
7.3. Principais Técnicas para o Paralelismo de Inversores Citadas na Literatura .................... 79
7.4. Controle com Conexão ...................................................................................................... 80
7.4.1. Central Limit Control ................................................................................................. 80
7.4.2. Master-Slave Control.................................................................................................. 81
7.4.3. Circular Chain Control ............................................................................................... 82
7.4.4. Distributed Logic Control .......................................................................................... 83
7.5. Controle sem Conexão ...................................................................................................... 84
7.6. Técnicas Proposta para o Paralelismo de Inversores ......................................................... 86
7.6.1. Primeira Proposta ....................................................................................................... 87
7.6.2. Segunda Proposta ....................................................................................................... 89
7.6.3. Terceira Proposta ........................................................................................................ 90
7.7. Simulação das Técnicas Propostas .................................................................................... 92
7.7.1. Estudo da Primeira Técnica ........................................................................................ 94
7.7.2. Estudo da Segunda Técnica ........................................................................................ 96
7.7.3. Estudo da Terceira Técnica ........................................................................................ 97
7.8. Implementação do Cálculo das Potências Reativa e da Potência Ativa dos Inversores .... 99
8. Conclusão ............................................................................................................................... 103
9. Anexos .................................................................................................................................... 105
9.1. Anexo A........................................................................................................................... 105
9.1.1. Cálculo do fluxo de potência entre um inversor e uma carga .................................. 105
9.1.2. Cálculo do fluxo de potência entre dois inversores .................................................. 106
9.1.3. Cálculo do fluxo de potência de dois inversores alimentando uma carga................ 108
10. Referência Bibliográfica ....................................................................................................... 110
Instituto de Eletrônica de Potência
3
Projetos de Inversores Monofásicos
_______________________________________________________________
Simbologia
Símbolos Adotados nos Equacionamentos
Símbolo
vo(α)
α
Vop
io(α)
ICM
d
Vi
vce
VCEN
ICN
VCO
iC
∆
Ei
tScon
TS
t
Pi
d/dt
PScon
M
tDcon
PDcon
VFO
VFN
IFN
ESon
tr
trN
IRR
IRR
trr
trrN
QrrN
fs
fr
pSon
PTSon
ESoff
tf
tfN
pSoff
PSoff
Significado
Valor instantâneo da tensão na saída do inversor
Ângulo da tensão de saída
Valor de pico da tensão de saída di inversor
Valor instantâneo da corrente na saída do inversor
Valor de pico da corrente de saída do inversor
Razão cíclica do sinal de comando dos interruptores
Tensão contínua na entrada do inversor
Queda de tensão entre coletor emissor do IGBT
Queda de tensão entre coletor emissor nominal na corrente nominal do IGBT
Corrente nominal de coletor do IGBT
Tensão threshold do IGBT
Valor instantâneo de coletor do iGBT
variação
Energia média instantânea perdida na etapa de condução do IGBT por
período de comutação
Tempo de condução do IGBT por período de comutação
Período de comutação
Tempo
Potência média instantânea perdida na etapa de condução do IGBT por
período de comutação
Operador diferencial
Potência média perdida por condução do IGBT
Índice de modulação
Tempo de condução do diodo por período de comutação
Potência média perdida por condução do diodo
Tensão threshold do diodo
Queda de tensão nominal no diodo na corrente nominal
Corrente nominal do diodo
Energia produzida na entrada em condução do IGBT
Tempo de subida da corrente no IGBT
Tempo nominal de subida da corrente no IGBT (valor de catálogo)
Corrente de recuperação reversa do diodo
Corrente nominal de recuperação reversa do diodo (valor de catálogo)
Tempo de recuperação reversa do diodo
Tempo nominal de recuperação reversa do diodo (valor de catálogo)
Carga nominal de recuperação reversa do diodo (valor de catálogo)
Freqüência de comutação dos interruptores
Freqüência fundamental da tensão de saída do inversor
Potência produzida na entrada em condução do IGBT
Potência média produzida na entrada em condução do IGBT
Energia produzida no bloqueio do IGBT
Tempo de descida da corrente no IGBT
Tempo nominal de descida da corrente nominal no IGBT
Potência produzida no bloqueio do IGBT
Potência média produzida no bloqueio do IGBT
Unidade
V
rad/s
V
A
A
V
V
V
A
V
A
J
s
s
s
W
W
s
W
V
V
V
J
s
s
A
A
s
s
C
Hz
Hz
W
W
J
s
s
W
W
Instituto de Eletrônica de Potência
4
Projetos de Inversores Monofásicos
_______________________________________________________________
PDoff
PS
PD
Ptotal
Tcigbt
Tjigbt
Tcdiodo
Tjdiodo
Tc
Td
Ta
Rjcigbt
Rjcdiodo
Rcd
Rda
Rca
PTigbt
PTdiodo
Potência média produzida no bloqueio do diodo
Potência total produzida no IGBT
Potência total produzida no diodo
Potência total produzida nos semicondutores do estágio de potência do
inversor
Temperatura de cápsula do IGBT
Temperatura de junção do IGBT
Temperatura de cápsula do diodo
Temperatura de junção do diodo
Temperatura de cápsula do módulo
Temperatura do dissipador
Temperatura ambiente
Resistência térmica junção-cápsula do IGBT
Resistência térmica junção-cápsula do diodo
Resistência térmica cápsula-dissipador
Resistência térmica dissipador-ambiente
Resistência térmica cápsula-ambiente
Potência produzida pelo IGBT
Potência produzida pelo diodo
W
W
W
W
o
C
C
o
C
o
C
o
C
o
C
o
C
o
C/W
o
C/W
o
C/W
o
C/W
o
C/W
W
W
o
Instituto de Eletrônica de Potência
5
Projetos de Inversores Monofásicos
_______________________________________________________________
1. Introdução
Inversores de tensão monofásicos tem sido objeto de pesquisa ao longo dos anos e dispõem
de vasta bibliografia, entretanto as abordagens adotadas não permitem desenvolver projetos completos.
A motivação para este trabalho reside na elaboração de material bibliográfico que permita o estudo e
entendimento dos fenômenos mais importantes para o desenvolvimento de projetos otimizados de
inversores de tensão monofásicos. O resultado será de grande valia para futuros projetos e permitirá
evoluções ainda mais consistentes no desenvolvimento destas estruturas.
O estudo está focado em inversores com a estrutura em ponte completa por ser a mais
utilizada e adequada para potências elevadas e possuir características interessantes em relação a
esforços de corrente e tensão, dentre outros fatores. A modulação adotada é SPWM de três níveis por
ser a mais adequada e difundida comercialmente em inversores monofásicos. O capítulo 2 aborda o
estudo das etapas de operação e da modulação, apresentando as formas de onda mais significativas
para o entendimento da estrutura.
Os Inversores de tensão senoidais devem fornecer – como sugere o nome - uma tensão
senoidal em sua saída. Entretanto, a operação dos interruptores em alta freqüência produz harmônicos
indesejáveis na saída do inversor. Para tanto, usualmente é empregado um filtro do tipo L-C na saída
do estágio inversor para que o conteúdo harmônico seja filtrado e somente a parcela referente à
freqüência fundamental esteja disponível na saída. O filtro de saída é abordado no capítulo 2 deste
documento, onde é apresentado o dimensionamento dos elementos do filtro e simulação.
No capítulo 3 será abordado a metodologia para obter um modelo matemático que represente
o inversor para a malha de tensão. Com este modelo é possível estudar formas de controlar essa malha
com o objetivo de obter uma tensão senoidal e com baixa distorção harmônica na saída do inversor.
Na continuidade do estudo é apresentada uma estrutura de controlador com uma metodologia de
projeto, que será a proposta do trabalho para o projeto do compensador de tensão para a malha de
tensão do inversor.
No capítulo 4 é apresentada a análise teórica da restrição da derivada do sinal de controle.
Esta análise é fundamental para prevenir o aparecimento de pulsos múltiplos no sinal de comando dos
interruptores. O aparecimento de pulsos múltiplos é indesejável, pois além de gerar distorção
Instituto de Eletrônica de Potência
6
Projetos de Inversores Monofásicos
_______________________________________________________________
harmônica da tensão de saída pode ocasionar a queima do inversor. Seu aparecimento está relacionado
à combinação paramétrica dos elementos que compõem o filtro de saída e o compensador de tensão.
Do ponto de vista da carga, inversores de tensão devem atender todas as possibilidades de carga,
desta forma na sua análise deve-se considerar o emprego de cargas lineares e não lineares. O capítulo
5 trata do estudo do comportamento do inversor monofásico alimentado carga não-linear. Do ponto de
vista da distorção harmônica da tensão na saída, a carga não-linear é a mais crítica. Isto pode induzir a
iniciar a análise a partir de cargas não-lineares, mas devido a sua complexidade optou-se pela análise
do inversor alimentando carga linear. A análise do inversor alimentando carga não-linear será
abordada como uma restrição ao modelo obtido com carga linear. Considerando o inversor de tensão
alimentando carga não-linear as principais restrições a serem consideradas são a máxima derivada do
sinal de controle, a derivada da corrente de carga e a capacidade de máxima derivada da corrente da
planta. Cabe ressaltar que a máxima derivada do sinal de controle é crítica também quando o inversor
alimenta cargas lineares e não apenas cargas não-lineares. Com a utilização de carga não-linear devese conhecer o comportamento da corrente e sua derivada máxima para que se possa verificar se o
inversor possui a dinâmica necessária para alimentar essa carga com uma tensão de saída com
distorção harmônica dentro de limites aceitáveis.
No capítulo 6 é apresentado um estudo de perdas para o dimensionamento térmico do inversor
de tensão monofásico, onde é apresentado o equacionamento para a obtenção das perdas nos
semicondutores, considerando a modulação senoidal.
Por fim, no capítulo 7 é apresentado um estudo do uso de inversores de tensão operando em
paralelo. O paralelismo de inversores é uma opção que está se tornando interessante para a indústria
devido a algumas vantagens apresentadas por essa arquitetura, como redundância, aumento da
potência instalada e confiabilidade. Nesse capítulo são apresentados os resultados de um estudo sobre
a ligação de inversores em paralelo, das principais técnicas usadas na literatura são mostrados alguns
resultados de simulação de uma técnica proposta para esta aplicação.
Instituto de Eletrônica de Potência
7
Projetos de Inversores Monofásicos
_______________________________________________________________
2. Estudo do Inversor de Tensão Monofásico
2.1. Inversor de Tensão Monofásico
Quando se trata de inversores de tensão monofásicos, várias estruturas são apresentadas na
literatura especializada. A escolha da estrutura mais adequada depende de diversos fatores como custo,
potência, esforços nos semicondutores, etc.
Para aplicações em potências superiores à 1KVA o inversor de tensão monofásico em ponte
completa aparece como a topologia natural pela versatilidade e características como baixos esforços
de tensão e corrente nos interruptores. Em contrapartida, algumas características como o emprego de
quatro interruptores controlados e a necessidade de isolação galvânica no comando destes
interruptores aparecem como desvantagens desta topologia.
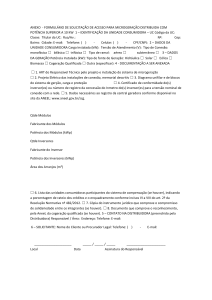
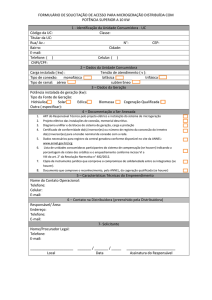
A figura a seguir apresenta o circuito de potência deste inversor, composta pelos quatro
interruptores controlados, filtro de saída e o transformador que deve ser empregado para prover
isolamento galvânico da carga e/ou adequar o nível de tensão.
S1
a
Vi
Lf
S2
b
1:n
S3
Cf
Z
S4
Figura 2.1– Inversor em ponte completa
Os interruptores S1, S2, S3 e S4 são acionados de acordo com uma estratégia de modulação, de
modo que a única restrição consiste na condução simultânea dos interruptores S1 e S3 ou S2 e S4.
O indutor e o capacitor do filtro de saída são representados por Lf e Cf respectivamente. O
transformador se situa entre o bloco inversor e o filtro, sendo “n” sua relação de transformação, Vi
representa a tensão CC de entrada e a carga é representada pelo elemento genérico Z.
Instituto de Eletrônica de Potência
8
Projetos de Inversores Monofásicos
_______________________________________________________________
2.2. Estratégias de Modulação
O princípio de funcionamento do inversor de tensão está intimamente ligado a
uma estratégia de modulação. Diversas são as estratégias de modulação propostas, entre as quais
se podem citar a modulação por pulso único, por largura de pulsos múltiplos e iguais entre si, por
largura de pulsos otimizada (PWM otimizada) e por largura de pulso senoidal (SPWM).
A modulação PWM varia a razão cíclica aplicada aos interruptores em uma alta freqüência de
comutação com o intuito de suprir uma determinada tensão ou corrente na saída em baixa freqüência.
Deseja-se criar uma seqüência de pulsos que devem ter o mesmo valor fundamental de uma referência
definida. Todavia, nesta seqüência de pulsos existem componentes harmônicos indesejados que devem
ser minimizados.
Como pontos positivos desta modulação destacam-se a operação em freqüência fixa e o
conteúdo harmônico deslocado para altas freqüências utilizando-se uma portadora. O emprego de
freqüência fixa aperfeiçoa o projeto dos componentes magnéticos, tendo em vista que em aplicações
onde a freqüência é variável os componentes magnéticos devem ser projetados para toda a faixa de
freqüência utilizada. Quando o conteúdo harmônico se concentra nas altas freqüências tem-se uma
diminuição de dimensão, peso e custo dos componentes do filtro.
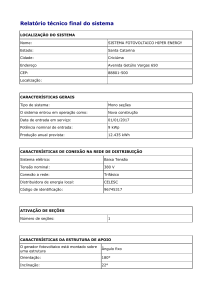
A modulação por largura de pulso senoidal de três níveis, ou SPWM unipolar, visa deslocar o
conteúdo harmônico para as altas freqüências.
O sinal de referência Vref é comparado com um sinal triangular Vtri na freqüência de comutação
de modo a se obter os pulsos de comando para os interruptores de um braço do inversor, S1 e S3, por
exemplo. Já os pulsos de comando para o outro braço são obtidos através da comparação do sinal de
referência com uma outra portadora triangular Vtri2, complementar a Vtri. Embora se utilize a portadora
triangular, pode-se aplicar uma portadora do tipo dente-de-serra, entretanto os resultados apresentados
com relação ao espectro harmônico da tensão Vab são inferiores.
Instituto de Eletrônica de Potência
9
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 2.2 – Detalhe da modulação SPWM 3 níveis.
2.3. Etapas de operação
Empregando a modulação unipolar o inversor apresenta oito etapas de operação, sendo quatro
referentes ao semiciclo positivo da tensão de saída e quatro ao semiciclo negativo.
Na seqüência são apresentadas as quatro etapas de operação referentes ao semiciclo positivo da
tensão de saída. Nestas etapas não há inversão da corrente na carga. As quatro etapas referentes ao
semiciclo negativo da tensão de saída são análogas às do semiciclo positivo da tensão de saída,
havendo inversão no sentido da corrente de carga.
Para a representação das etapas de operação serão adotadas algumas simplificações como o não
emprego do transformador e a substituição da carga por uma fonte de corrente.
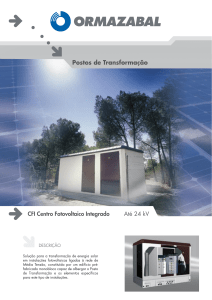
A primeira etapa de operação ocorre de 0 até To e se caracteriza pela condução simultânea dos
interruptores S1 e S4, nesta etapa há transferência de energia da fonte Vi para a carga. Os interruptores
S2 e S3 devem estar bloqueados nesta etapa de operação. A figura a seguir representa esta etapa de
operação.
Instituto de Eletrônica de Potência
10
Projetos de Inversores Monofásicos
_______________________________________________________________
D1
S1
a
Vi
b
D3
S3
D2
S2
D4
S4
Figura 2.3 - Primeira etapa de operação.
Na segunda etapa de operação não há transferência de energia da fonte Vi para a carga, sendo
que a corrente circula em roda livre através do interruptor S1 e o diodo D2. O diodo D2 é habilitado a
conduzir devido ao bloqueio de S4 que ocorre em T1 – figura 6. Pode-se notar que devido ao sentido
da corrente da carga, o interruptor S2 não chega a conduzir, mesmo comandado em T2. A Figura 2.4
apresenta a segunda etapa de operação.
D1
S1
a
Vi
S3
D2
S2
b
D3
S4
D4
Figura 2.4 – Segunda etapa de operação.
A terceira etapa de operação é idêntica a primeira e inicia em T4 com a entrada em condução
do interruptor S4. Pode ser observado na figura 7 que S2 é bloqueado em T3 para que não ocorra
condução simultânea de interruptores do mesmo braço, o que certamente ocasionaria a queima destes.
A Figura 2.5 mostra a terceira etapa de operação.
Instituto de Eletrônica de Potência
11
Projetos de Inversores Monofásicos
_______________________________________________________________
D1
S1
a
Vi
b
D3
S3
D2
S2
D4
S4
Figura 2.5 - Terceira etapa de operação.
Na quarta etapa de operação o interruptor S1 é bloqueado em T5 e o diodo D3 entra em
condução assumindo a corrente de carga. O interruptor S3, apesar de comandado em T6, não chega a
conduzir devido ao sentido da corrente. Esta etapa é apresentada na Figura 2.6.
D1
S1
a
Vi
S3
D2
S2
b
D3
S4
Figura 2.6 – Quarta etapa de operação.
D4
Instituto de Eletrônica de Potência
12
Projetos de Inversores Monofásicos
_______________________________________________________________
Vab
Vi
t
0
S1
t
S2
t
S3
t
S4
t
T1 T2
T3 T4
T5 T6
T7 T8
Figura 2.7 – Forma de onda da tensão Vab e comando dos interruptores.
2.4. Projeto do filtro LC
Equation Section 2Equation Chapter (Next) Section 2
2.4.1. Cálculo do Indutor Lf
No inversor com modulação SPWM unipolar a freqüência de operação do filtro de saída é o
dobro da freqüência de comutação dos interruptores (ver Figura 2.8), portanto, o projeto do filtro de
saída deve levar em consideração este fato.
Instituto de Eletrônica de Potência
13
Projetos de Inversores Monofásicos
_______________________________________________________________
nVi-Vopsen( rt)
VL(t)
Ts*
t1
t2
Ts
Vopsen( rt)
t
iL(t)
q
IL
Ts*/2
vC(t)
Vc
Figura 2.8 – Principais formas de onda no filtro de saída.
Na Figura 2.8 é mostrada a tensão no indutor VL na saída do inversor, na mesma figura também é
apresentada, a ondulação de corrente devido à comutação dos interruptores. Da figura percebe-se que a
operação do filtro é o dobro da freqüência de comutação, isto é, o período de operação do filtro Ts* de
saída será a metade do período de comutação Ts.
Ts
(2.1)
2
Considerando a freqüência de comutação muito maior que a freqüência da tensão de saída, podeTs *
se considerar a Eq.(2.2) verdadeira.
t1 t2
(2.2)
Logo, pode-se definir a razão cíclica d(t)* para um período Ts* de operação do filtro, como
mostra a Eq.(2.3).
d (t )*
t1
Ts *
(2.3)
Instituto de Eletrônica de Potência
14
Projetos de Inversores Monofásicos
_______________________________________________________________
A tensão no indutor para os interruptores fechados é dada pela Eq.(2.4).
diLf (t )
n Vi Vop sen(r t )
(2.4)
dt
A ondulação de corrente para o semiciclo positivo da tensão de saída ser obtida através da
Lf
Eq.(2.5), onde t1 é o tempo em que os interruptores permanecem fechados durante um período de
operação da freqüência na entrada do filtro.
iLf (t )
n Vi Vop sen(r t )
(2.5)
t1
Lf
A partir da Eq.(2.3) obtém-se o valor do tempo em função da razão cíclica d(t)*, logo,
substituindo esta relação na Eq.(2.5), tem-se:
iLf (t )
n Vi Vop sen(r t )
(2.6)
Ts * d (t ) *
Lf
Seja a freqüência de comutação maior a freqüência da tensão de saída, a razão cíclica d(t)* para
a freqüência de operação do filtro é dada pela Eq. (2.7).
d (t )*
Vop sen(r t )
(2.7)
n Vi
Substituindo a Eq(2.7). na Eq(2.6)., obtém-se a Eq.(2.8), que relaciona a ondulação da corrente
com a tensão de saída.
TsVop
Vop sen 2 (r t )
sen
(
t
)
r
2 L f
n Vi
Logo, a ondulação de corrente parametrizada é expressa através da Eq. (2.9).
iLf (r t )
(2.8)
Vop
Vop sen 2 (r t )
(2.9)
sen(r t )
Ts n Vi n Vi
n Vi
Na Figura 2.9 foram traçadas curvas da ondulação de corrente parametrizada em função do
PiLf (n Vi , Vop , r t ) iLf (r t )
2L f
ângulo da tensão de saída, para diferentes tensões de saída, considerando a tensão de entrada
constante.
Instituto de Eletrônica de Potência
15
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 2.9 Ondulação da corrente no indutor em função do ângulo da tensão de saída.
Da Figura 2.9 percebe-se que a máxima ondulação de corrente se encontra em função do ângulo
da tensão de saída. Logo, o ângulo para o máximo valor pode ser calculado a partir da derivada da
Eq.(2.9). Assim:
dPiLf (t )
cos(r t )
2Vop sen(r t ) cos(r t )
d r t
As soluções da Eq. (2.10), são:
r t1
n Vi
0
2
n Vi
r t2 sen 1
2V
op
(2.10)
(2.11)
(2.12)
n Vi
(2.13)
2V
op
Logo, a máxima ondulação de corrente parametrizada é dada pela seguinte expressão:
r t3 sen 1
n Vi
1
4 ;Vop 2
PI L
V
V
op 1 op ;Vop n Vi
n Vi n Vi
2
A ondulação de corrente em função da indutância é mostrada na Eq.(2.15).
(2.14)
Instituto de Eletrônica de Potência
16
Projetos de Inversores Monofásicos
_______________________________________________________________
n Vi
8 f L
s f
I L
Vop
2 fs Lf
;Vop
n Vi
2
Vop
1
n Vi
n Vi
;Vop
2
(2.15)
Finalmente, a Eq.(2.16) mostra a indutância necessária no filtro LC para uma determinada
ondulação de corrente.
n Vi
n Vi
8 f I ;Vop 2
s L
Lf
Vop 1 Vop ;V n Vi
2 f s I L n Vi op
2
2.4.2. Cálculo da Capacitância Cf
(2.16)
A capacitância Cf do filtro LC é calculada em função da máxima ondulação de tensão associada
à ondulação de corrente na freqüência de operação do filtro. A ondulação de tensão correspondente ao
formato da corrente é mostrada na Fig. 3.1. Assumindo que toda a componente alternada da corrente
na alta freqüência circula pelo capacitor, pode-se calcular a variação da tensão a partir da variação da
carga, como mostrado na Eq. (2.17).
q
(2.17)
Cf
VCf
A variação de carga “∆q” no capacitor Cf pode ser calculada através da Eq.(2.18) .
1 I L Ts *
(2.18)
2 2 2
Substituindo a Eq.(2.18) em Eq.(2.17), obtém-se a expressão da ondulação de tensão em função
q
da capacitância.
I LTs *
(2.19)
8C f
A máxima ondulação de tensão no filtro capacitivo de saída pode ser calculada a partir da
VCf
máxima ondulação de corrente no capacitor. Logo, Substituindo a Eq.(2.16) em Eq.(2.19), obtém-se a
Eq.(2.20) que relaciona a ondulação de tensão em função de parâmetros conhecidos.
Instituto de Eletrônica de Potência
17
Projetos de Inversores Monofásicos
_______________________________________________________________
n Vi
n Vi
128 f 2 L C ;Vop 2
s
f
f
VCf
Vop
V
n Vi
1 op ;Vop
2
16 f s L f C f n Vi
2
(2.20)
A partir da Eq.(2.20) pode-se obter a expressão que permita o cálculo da capacitância em função
da máxima ondulação de tensão na alta freqüência. Assim:
n Vi
n Vi
128 f 2 L V ;Vop 2
s
f
Cf
Cf
Vop
V
n Vi
1 op ;Vop
2
16 f s L f VCf n Vi
2
(2.21)
2.5. Simulação de um Inversor Monofásico de 10kVA
Todo desenvolvimento do projeto para a realização das simulações foi feito numa planilha no
software MathCad . A Tabela 2.1 apresenta a especificação do inversor monofásico utilizado em todas
as simulações deste documento.
Tabela 2.1 – Especificação do inversor monofásico.
Tensão CC de alimentação
400V
Tensão de saída do inversor
220Vef
Potencia de saída
10kW
Freqüência de comutação dos interruptores
20 kHz
Freqüência de saída
60Hz
Variação de corrente no indutor
30% Inominal
Variação da tensão de saída
1% Vnominal
Este capítulo apresenta os resultados de simulação do inversor monofásico de 10kW, usando o
filtro LC. Para esta tarefa foi usado o software PSIM 6.0.
O circuito para gerar a modulação SPWM 3 níveis (Unipolar) é apresentado na Figura 2.10 e o
circuito de potência do inversor é apresentado na Figura 2.11. A carga de 10kW é representada pelo
resistor Ro.
Instituto de Eletrônica de Potência
18
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 2.10.Circuito da modulação SPWM 3 níveis.
Figura 2.11 Circuito da potência do inversor.
A Figura 2.12 mostra com detalhes a modulação SPWM 3 níveis, onde percebe-se as duas
portadoras triangulares defasadas de 180 graus, a comparação com a referencia senoidal e a geração
dos pulsos dos interruptores S1, e S4. Nesse tipo de modulação os interruptores S2 e S3 são
comandados com sinais complementares aos comandos S4 e S1 respectivamente. Na Figura 2.13 é
apresentado o sinal da tensão de referência e a tensão de saída do inversor (Vo). É possível concluir
que a tensão de saída está seguindo a tensão de referencia, em fase e amplitude, comprovando a
implementação da modulação SPWM.
Instituto de Eletrônica de Potência
19
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 2.12 Sinais da modulação SPWM 3 níveis e os pulsos de comando dos interruptores.
Figura 2.13 Sinal de referencia e tensão de saída do inversor.
A tensão na saída do inversor, ou entrada do filtro LC, denominada de VAB, é mostrada na
Figura 2.16. Essa figura também mostra a tensão de saída do filtro LC. Nota-se que a tensão VAB de
saída do inversor apresenta pulsos positivos no semiciclo positivo da tensão de referência e pulsos
negativos no semiciclo negativo da tensão de referência. Além disso, a tensão VAB possui um
componente na freqüência fundamental e uma componente no dobro da freqüência de comutação
(40kHz). Essas características são devido à modulação SPWM 3 níveis. O filtro LC atenua toda
Instituto de Eletrônica de Potência
20
Projetos de Inversores Monofásicos
_______________________________________________________________
componente em alta freqüência da tensão VAB e a tensão de saída Vo é composta apenas pela
componente fundamental, em 60Hz.
Para carga nominal de 10 kW, são apresentados na Figura 3.1 o comportamento das correntes no
indutor Lf, do capacitor Cf e na carga. A corrente no indutor está de acordo com o projeto, toda
componente de alta freqüência circula pelo ramo do capacitor Cf e a corrente de carga possui apenas a
componente fundamental da corrente total fornecida pelo inversor. A Figura 3.2 mostra com detalhe a
ondulação de corrente no indutor, que é menor que os 9,6A especificado. Essa figura também mostra a
ondulação da tensão de saída que é menor que os 3,1V especificados.
Os resultados apresentados nesse capítulo consolidaram os estudos do inversor, da modulação
SPWM 3 níveis e principalmente validaram a metodologia e o projeto do filtro LC.
Figura 2.14 Tensão VAB e tensão de saída do inversor.
Instituto de Eletrônica de Potência
21
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 2.15 Correntes ILF, Io e ICF.
Figura 2.16 - Ondulação de corrente em ILF e ondulação da tensão Vo.
3. Modelo Matemático do Inversor para a Malha de Tensão
No projeto de um inversor a tensão de saída geralmente é uma das variáveis especificada, em
que sua amplitude, freqüência e taxa de distorção harmônica devem seguir adequadamente a exigência
do projeto. Diante desta necessidade o sistema precisa possuir uma malha de controle responsável por
garantir essa exigência. Para projetar adequadamente o compensador de tensão deve-se obter um
modelo matemático que represente o comportamento do inversor em relação à tensão de saída. A
Instituto de Eletrônica de Potência
22
Projetos de Inversores Monofásicos
_______________________________________________________________
variável de controle do inversor é a razão cíclica dos interruptores e a variável que se deseja controlar
é a tensão de saída. Por isso, busca-se definir uma função envolvendo a tensão de saída em relação à
tensão de controle, considerando o modulador e a função de modulação. O equacionamento do modelo
matemático do inversor em ponte completa depende da modulação imposta aos seus interruptores.
O esquema simplificado do circuito do inversor de tensão está mostrado na Figura 3.1, em que
Vc é a tensão de controle aplicada ao modulador SPWM e este aplica os pulsos de comando (C1, C2,
C3 e C4) nos interruptores do inversor. Vo é a tensão de saída do inversor, Tv é o transdutor de tensão e
Vref é a tensão de referência.
Figura 3.1– Circuito do inversor de tensão com o diagrama do circuito de controle da malha de tensão.
A razão cíclica dos interruptores é definida como a razão entre o tempo em que um determinado
interruptor conduz e o seu respectivo período de comutação [4]. Portanto tem-se como valor mínimo
zero e valor máximo 1.
Na modulação SPWM 3 níveis, a forma de onda da tensão nos terminais de entrada do filtro
(VAB), no semiciclo positivo da tensão de saída do filtro, apresenta o formato mostrado na Figura 3.2.
Através da forma de onda da tensão VAB é possível determinar a tensão média quase instantânea
VABmed expressa na equação (3.1).
Instituto de Eletrônica de Potência
23
Projetos de Inversores Monofásicos
_______________________________________________________________
VAB
Vi
VABmed
t
Ts-∆T
Ts
Figura 3.2 Tensão VAB na entrada do filtro durante o semiclico positivo da tensão Vo.
Equation Chapter 3 Section 3 VABmed
T
Vi
Ts
(3.1)
Conforme a Figura 3.2, ∆T refere-se à condução simultânea de S1 e S4 enquanto TS − ∆T refere-se
à condução simultânea dos interruptores S1 e S2 ou S3 e S4. Portanto, estas relações não podem ser
confundidas com a razão cíclica dos interruptores, apesar de estarem diretamente relacionadas. A
equação (3.2) apresenta uma relação, considerando as etapas de funcionamento no semiciclo positivo,
para d2(t), que é a razão cíclica dos interruptores S2 e S3. Deve-se ressaltar que a razão cíclica é
calculada utilizando-se dois períodos de comutação em decorrência da modulação unipolar
empregada. A razão cíclica dos interruptores S1 e S4, definida como d1 e é dada pela equação (3.3).
Ts T
d 2 (t)
2 Ts
Ts T
d1 (t)
2 Ts
Manipulando a equação (3.2), tem-se a equação (3.4):
(3.2)
(3.3)
(3.4)
T Ts 1 2 d 2 (t)
Substituindo a equação (3.4) na equação (3.1) se obtém a equação (3.5), que é a tensão VAB
média quase instantânea na entrada do filtro definida em função do tempo de condução dos
interruptores.
VABmed (t) 1 2 d 2 (t) Vi
(3.5)
A razão cíclica aplicada aos interruptores do inversor (d1(t) e d2(t)) varia de acordo com uma
função de modulação. No caso da SPWM de três níveis, a função de modulação de cada conjunto de
Instituto de Eletrônica de Potência
24
Projetos de Inversores Monofásicos
_______________________________________________________________
interruptores e suas respectivas razões cíclicas estão relacionadas segundo as equações (3.6) e (3.7).
Para que esta relação seja válida, a freqüência de comutação dos interruptores deve ser alta a ponto
que a função de modulação e a razão cíclica dos interruptores poderem ser consideradas constantes no
equacionamento [5]. A função de modulação neste caso varia de -1 a 1. Quando fm=1 tem-se d1 =1 e
d2 =0 , ou seja, razão cíclica máxima nos interruptores S1 e S4 e mínima em S2 e S3. Quando fm=-1
corre o contrário. A partir de uma função de modulação específica como, por exemplo, uma senóide
ou o sinal de saída de um compensador, pode-se variar a razão cíclica dos interruptores de modo a se
obter uma tensão desejada na sua saída.
1
1 f m (t)
(3.6)
2
1
d 2 (t) 1 f m (t)
(3.7)
2
Substituindo a equação (3.7) em (3.5) tem-se a equação (3.8), que representa a relação entre a
d1 (t)
tensão média quase instantânea na entrada do filtro do inversor em relação à função de modulação. No
semiciclo negativo tem-se o mesmo resultado.
(3.8)
VABmed (t) f m (t) Vi
A equação (3.8) mostra que a tensão média instantânea Vab segue a função de modulação
imposta com um ganho de Vi. Este resultado é muito importante, pois pode-se representar o a tensão
de entrada do filtro do inversor pela função de modulação do circuito multiplicado pelo ganho da
tensão de entrada do inversor (Vi). Esta representação é muito útil para este e outros estudos sobre
inversores de freqüência.
A modulação SPWM dois nível apresenta o mesmo resultados obtido na equação (3.8).
Aplicando a transformada de Laplace na equação (3.8) e considerando a tensão de entrada Vi
constante determina-se a função de transferência entre a tensão de entrada do filtro e a função de
modulação, definida na equação (3.9).
VABmed (s)
(3.9)
Vi
f m (s)
Baseado na equação (3.8) é possível definir um circuito equivalente do inversor mostrado na
Figura 3.3. A função de transferência da saída do inversor em função da função de modulação é obtida
pelo equacionamento do circuito equivalente. No circuito rLf representa a resistência do indutor de
Instituto de Eletrônica de Potência
25
Projetos de Inversores Monofásicos
_______________________________________________________________
filtragem, Lf o indutor, Cf o capacitor do filtro do inversor, RSE a resistência interna do capacitor Cf e
Ro a resistência de carga. A tensão VABmed é modelada como uma fonte de tensão controlada pela
variável fm(t).
Figura 3.3 – Circuito equivalente do inversor.
Escrevendo as equações de malha e de nós do circuito da Figura 3.3 obtém-se:
f m (t) Vi Lf
di Lf (t)
rLf i Lf (t) Vo (t)
dt
i Lf (t) i Cf (t) i o (t)
(3.10)
(3.11)
dVo (t)
(3.12)
dt
A resistência série equivalente do capacitor foi desprezada no modelo tendo em vista que são
i Cf (t) Cf
utilizados capacitores de polipropileno que se caracterizam por possuir uma resistência série
equivalente muito baixa.
Aplicando-se a transformada de Laplace nas equações (3.10), (3.11) e (3.12) e manipulando-as,
determina-se a função de transferência entre a tensão de saída Vo e a função de modulação,
representada pela equação (3.13).
Vo (t)
f m (t)
Vi
(3.13)
Lf
rf
s L f Cf s
rf 1
Ro
Ro
No sistema de controle proposto a tensão proveniente do controlador é inserida no modulador,
2
que é responsável por transformar a função de modulação nos pulsos adequados de comando para os
interruptores.. A portadora utilizada no modulador é do tipo triangular com amplitude fixa e opera na
freqüência de comutação dos interruptores. Conforme [6], o comportamento da tensão de saída do
modulador é definido pela equação (3.14), onde Vp representa a tensão de pico da onda triangular
(portadora) e Vc(t) é a tensão proveniente do compensador.
Instituto de Eletrônica de Potência
26
Projetos de Inversores Monofásicos
_______________________________________________________________
f m (s)
Vc (s)
Vp
(3.14)
Substituindo a equação (3.14) na equação (3.13) obtém-se a função de transferência da tensão de
saída em função do sinal de controle, definida na equação (3.15):
Vo (t) 1
Vc (t) Vp
Vi
(3.15)
Lf
rf
s L f Cf s
rf 1
R
o
Ro
A pior situação para o sistema de controle é quando o inversor está operando a vazio, ou seja,
2
considerando Ro infinito, por isso o compensador deve ser ajustado nessa condição. Fazendo Ro
infinito (inversor operando a vazio) e considerando rf muito pequeno, pode-se reescrever as equação
(3.15) como:
Vo (t) 1
Vi
2
Vc (t) Vp s Lf Cf 1
(3.16)
A função de transferência da equação (3.16) representa o modelo matemático do inversor usado
para projetar o compensador de tensão.
3.1. Projeto do compensador
Nesse capítulo será apresentada uma metodologia para o projeto do compensador da malha de
tensão. A Figura 3.4 mostra um diagrama de blocos da malha de controle em estudo. O controlador de
tensão Cv(s) responsável pelo sinal de modulação observa a tensão Vo (obtida por meio de sensor de
ganho Tv) sobre o capacitor de saída, comparando-a com a desejada (Vref), a fim de gerar a ação de
controle. Este sinal de controle é comparado com uma forma de onda triangular para gerar os pulsos
de gatilho para os interruptores. Os pulsos de comando passam por um circuito de comando para
geração das tensões apropriadas para o comando dos interruptores e geração do tempo morto. O
controlador deve estar projetado para manter uma tensão senoidal com baixa distorção harmônica na
saída do filtro L-C.
1
s L f Cf 1
2
Figura 3.4 – Diagrama de blocos da malha de controle.
Instituto de Eletrônica de Potência
27
Projetos de Inversores Monofásicos
_______________________________________________________________
A planta a ser controlado é um circuito de segunda ordem com pouco amortecimento. A equação
(3.17) apresenta a função de transferência da planta considerando o conversor a vazio, e desprezando a
resistência do indutor e a RSE do capacitor. A equação (3.18) define a freqüência de ressonância, onde
estão alocados os dois pólos da planta. A Figura 3.5 mostra um exemplo da resposta em freqüência
(diagrama de bode) deste tipo de sistema. A abordagem clássica para controlar este tipo de planta é
projetar o controlador de tal forma que a dinâmica do sistema compensado seja de um integrador com
um determinado ganho. A característica integradora garante erro nulo na saída, ou seja, garante o valor
especificado na tensão de saída do inversor e o ganho ajusta a velocidade de resposta, estabilidade e
atenuação na freqüência de comutação.
Vo (t) 1
Vi
2
Vc (t) Vp s Lf Cf 1
fo
(3.17)
1
2 L f Cf
100
(3.18)
fo
fc
[ dB ]
50
GdBi
0
50
100
10
100
1 10
3
4
1 10
5
1 10
1 10
6
fi
[ Hz ]
Figura 3.5 – Módulo do diagrama de Bode da planta da malha de tensão.
O controlador clássico utilizado é do tipo PID (proporcional-integral-derivativo) e tem sua
função de transferência mostrada na equação (3.19). Este controlador possui um integrador (pólo na
origem), um pólo (pv) e dois zeros (zv), além do ganho kv. O integrador deve ser usado nesta função de
transferência para que a dinâmica resultante do sistema possa tender a um integrador com ganho. Os
dois zeros do compensador são dispostos sobre a freqüência de ressonância do filtro de modo a
eliminar o efeito do duplo pólo da planta (equação (3.20)). O outro pólo encontrado no controlador é
Instituto de Eletrônica de Potência
28
Projetos de Inversores Monofásicos
_______________________________________________________________
usado porque não é possível a implementação física de sistemas com um número de zeros maior do
que o de pólos. Além disso, este pólo evita uma amplificação de sinais de alta freqüência que passam
pelo controlador. É normalmente alocado em quarenta vezes [3] a freqüência de ressonância do filtro
L-C (equação (3.21).) por ser uma freqüência maior do que a de comutação, fazendo com que o
mesmo não influencie na dinâmica e nem na margem de fase do sistema.
O ganho do compensador Kv é ajustado de maneira a atender a especificação da freqüência de
corte. Esta freqüência é ajustada no máximo em um quarto da freqüência de comutação e tem ligação
direta com a velocidade de resposta do controlador. Quanto maior a freqüência de cruzamento melhor
a dinâmica do compensador. Quando se utiliza a modulação SPWM unipolar, em que a freqüência de
ondulação da tensão de saída se encontra em torno de duas vezes a freqüência de comutação, pode-se
ajustar fc como sendo a metade da freqüência de comutação, desde que as restrições de derivada no
modulador sejam respeitadas. Na freqüência de cruzamento deseja-se que o ganho do sistema em
malha aberta seja 0 dB. Sendo assim, o ganho do compensador é determinado para atender essa
especificação, fazendo seu valor igual, mas em sinal oposto ao ganho da planta na freqüência de
cruzamento. A Figura 3.6 mostra um exemplo da resposta em freqüência de um compensador ajustado
seguindo essas instruções e a Figura 3.7 apresenta um exemplo da resposta em freqüência de laço
aberto de uma planta compensada, que tem a característica integradora desejada.
(s z v ) (s z v )
s (s p v )
1
Zv
Lf Cf
C v (s) k v
pv
40
Lf Cf
(3.19)
(3.20)
(3.21)
Instituto de Eletrônica de Potência
29
Projetos de Inversores Monofásicos
_______________________________________________________________
[ dB ]
50
HdBi
0
10
100
3
4
1 10
5
1 10
1 10
fi
[ Hz ]
Figura 3.6 - Módulo do diagrama de Bode do compensador PID da malha de tensão.
fc
fVA B
[ dB ]
50
GH dBi
0
50
10
100
3
1 10
4
1 10
5
1 10
fi
[ Hz ]
Figura 3.7 – Módulo do diagrama de Bode da função de transferência de laço aberto da malha de tensão.
A implementação do controlador proposto é feita utilizando um circuito bastante difundido na
literatura, que pode ser observado na Figura 3.8 [7]. Este circuito, além de implementar a função de
transferência do controlador PID, também executa a subtração do sinal de referência pelo sinal
proveniente do sensor de tensão.
A função de transferência deste circuito está representada na equação (3.22). A partir desta
função são determinados os valores apropriados para os componentes. Inicialmente, arbitra-se um
valor inicial para o resistor Riz, e usando as equações (3.23) a (3.29) determina-se os outros
componentes.
Instituto de Eletrônica de Potência
30
Projetos de Inversores Monofásicos
_______________________________________________________________
Ci
Rip
Cf
Riz
-
Vo
Rfz
Vc
Vref
+
Rref
Figura 3.8 – Circuito elétrico do compensador PID.
1 R iz Ci s 1 R fz Cf s
Vc (s)
C v (s)
Vomedido (s)
R ip R iz
Cf s R ip R iz 1 Ci s
R iz R ip
1
2 R iz f zv
A1
R ip R iz
A 2 A1
Sendo A2 o ganho em alta freqüência do compensador definido como:
Ci
A2 10
H2
20
(3.22)
(3.23)
(3.24)
(3.25)
e H2:
f
(3.26)
H 2 A 20 log pv
fc
O ganho A é o valor de ganho que o compensador irá adicionar ao sistema na freqüência de
corte, ou seja, é o ganho da planta na freqüência de corte multiplicado por (-1).
A1 é o ganho definido pela relação:
H1
A1 10 20
(3.27)
e H1:
f pv
H1 H 2 20 log
fo
Por fim, Cfz é definido pela relação da equação (3.29):
(3.28)
R iz
(3.29)
R fz
Seguindo esses procedimentos é possível projetar o compensador de tensão para a malha de
Cfz Ci
controle de Vo de um inversor de freqüência. Essa é uma metodologia clássica, que apresenta bons
resultados para cargas resistivas, capacitivas e indutivas.
Instituto de Eletrônica de Potência
31
Projetos de Inversores Monofásicos
_______________________________________________________________
3.2. Simulação com o Compensador de Tensão
Para validar a metodologia do projeto do compensador foram realizadas simulações para
diversas situações. Nestas simulações pretende-se apresentar o comportamento do inversor operando
em malha fechada sob diversas situações de carga.
A especificação e o circuito utilizados para realizar as simulações é apresentado na Tabela
3.1 e na Figura 3.9.
Tabela 3.1 – Especificação do inversor monofásico com o compensador.
Tensão CC de alimentação
400V
Tensão de saída do inversor
220Vef
Potencia de saída
10kW
Freqüência de comutação dos interruptores
20 kHz
Freqüência de saída
60Hz
Variação de corrente no indutor
30% Inominal
Variação da tensão de saída
1% Vnominal
Freqüência do primeiro zero do controlador
3,175 kHz
Freqüência do segundo zero do controlador
3,175 kHz
Freqüência do primeiro pólo do controlador
0 Hz
Freqüência do segundo pólo do controlador
79,4 kHz
Posição do segundo pólo em relação a
25*fc
freqüência de cruzamento
Ganho do compensador
3,24
Instituto de Eletrônica de Potência
32
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 3.9 – Circuito simulado.
Inicialmente é apresentada na Figura 3.10 a forma de onda da tensão na saída do inversor
operando sem carga. Pode-se observar que não há distorção na forma de onda e o valor da tensão de
saída está de acordo com a especificação de projeto, que neste caso é de 220 V.
Instituto de Eletrônica de Potência
33
Projetos de Inversores Monofásicos
_______________________________________________________________
Tensão de saída - Vo
400
300
Tensão [V]
200
100
0
100
200
300
400
0
0.0063
0.0125
0.0188
0.025
0.0313
0.0375
0.0438
0.05
Tempo [s]
Figura 3.10 – Tensão de saída Vo – sem carga.
Na Figura 3.11 é apresentada a forma de onda na saída do compensador da malha de tensão
também com o inversor operando a vazio.
Tensão na saída do controlador - Vc
6
4.5
Tensão [V]
3
1.5
0
1.5
3
4.5
6
0
0.0063
0.0125
0.0188
0.025
0.0313
0.0375
0.0438
0.05
Tempo [s]
Figura 3.11 – Tensão na saída do compensador Vc – sem carga.
Instituto de Eletrônica de Potência
34
Projetos de Inversores Monofásicos
_______________________________________________________________
Na seqüência são mostradas as Figura 3.12 e Figura 3.13 que apresentam as formas de onda
da tensão de saída do inversor e saída do compensador de tensão respectivamente, para a situação onde
é aplicado 100% de carga na saída do inversor de tensão. Pode-se observar que a tensão mantém seu
valor nominal de projeto. É importante salientar que a carga é puramente resistiva.
Tensão de saída - Vo
400
300
Tensão [V]
200
100
0
100
200
300
400
0
0.0063
0.0125
0.0188
0.025
0.0313
0.0375
0.0438
0.05
Tempo [s]
Figura 3.12 – Tensão de saída Vo – 100% de carga.
Tensão na saída do controlador - Vc
6
4.5
Tensão [V]
3
1.5
0
1.5
3
4.5
6
0
0.0063
0.0125
0.0188
0.025
0.0313
0.0375
0.0438
0.05
Tempo [s]
Figura 3.13 – Tensão na saída do compensador Vc – 100% de carga.
Instituto de Eletrônica de Potência
35
Projetos de Inversores Monofásicos
_______________________________________________________________
A Figura 3.14 apresenta os sinais empregados para obter o comando dos interruptores. Pode
se observar na figura a forma de onda triangular – portadora -, e o sinal de saída do controlador que
quando comparados geram o sinal de comando do interruptor S1.
Vtri 1
Com S1
8
Vc
Sinais do modulador
6
Tensão [V]
4
2
0
2
4
6
8
0.006
0.006025 0.00605 0.006075 0.0061 0.006125 0.00615 0.006175 0.0062
Tempo [s]
Figura 3.14 – Tensão na saída do compensador Vc – 100% de carga.
O comportamento da tensão de saída do inversor mediante um degrau de 100% de carga é
apresentado na Figura 3.15. Pode-se observar uma distorção na forma de onda que aparece na forma
de sobre tensão. Novamente ressalta-se que a carga empregada é puramente resistiva.
Instituto de Eletrônica de Potência
36
Projetos de Inversores Monofásicos
_______________________________________________________________
Tensão de saída - Vo
400
300
Tensão [V]
200
100
0
100
200
300
400
0
0.0063
0.0125
0.0188
0.025
0.0313
0.0375
0.0438
0.05
Tempo [s]
Figura 3.15 – Tensão de saída Vo com degrau de carga: 50% →100%.
Na Figura 3.16 pode ser observada a forma de onda na saída do compensador da malha de
tensão, verifica-se uma perturbação do sinal quando da ocorrência do degrau na carga.
Tensão na saída do controlador - Vc
12
9.88
Tensão [V]
7.75
5.63
3.5
1.38
0.75
2.88
5
0
0.0063
0.0125
0.0188
0.025
0.0313
0.0375
0.0438
0.05
Tempo [s]
Figura 3.16 – Tensão na saída do compensador Vc com degrau de carga: 50% →100%.
Instituto de Eletrônica de Potência
37
Projetos de Inversores Monofásicos
_______________________________________________________________
A Figura 3.17 apresenta em detalhe a perturbação causada pelo degrau de carga, tanto na
saída do inversor como na saída do compensador da malha de tensão.
Detalhe das tensões Vo e Vc
400
20
Vo
Vc
Tensão [V]
300
17.5
200
15
100
12.5
0
10
100
7.5
200
5
300
2.5
400
0.019
0.0195
0.02
0.0205
0.021
0.0215
0.022
0.0225
0
0.023
Tempo [s]
Figura 3.17 – Detalhe das tensões Vo e Vc mediante o degrau de carga: 50% →100%.
Na seqüência são apresentadas as figuras das formas de onda da tensão de saída, saída do
controlador e detalhe da perturbação mediante degrau de carga variando desde 100% até 50% da
carga.
Tensão de saída - Vo
400
300
Tensão [V]
200
100
0
100
200
300
400
0
0.0063
0.0125
0.0188
0.025
0.0313
0.0375
0.0438
0.05
Tempo [s]
Figura 3.18 – Tensão de saída Vo com degrau de carga: 100% →50%.
Instituto de Eletrônica de Potência
38
Projetos de Inversores Monofásicos
_______________________________________________________________
Tensão na saída do controlador - Vc
6
4.5
3
Tensão [V]
1.5
0
1.5
3
4.5
6
0
0.0063
0.0125
0.0188
0.025
0.0313
0.0375
0.0438
0.05
Tempo [s]
Figura 3.19 – Tensão na saída do compensador Vc com degrau de carga: 100% →50%.
Detalhe das tensões Vo e Vc
10
400
Vo
Vc
Tensão [V]
350
8.13
300
6.25
250
4.38
200
2.5
150
0.63
100
1.25
50
3.13
0
0.019
0.0195
0.02
0.0205
0.021
0.0215
0.022
0.0225
5
0.023
Tempo [s]
Figura 3.20 – Detalhe das tensões Vo e Vc mediante o degrau de carga – 100%→50%.
Nas Figura 3.21 e Figura 3.22 pode-se observar o comportamento da tensão na saída do
inversor e do compensador quando se conecta ao inversor uma carga não-linear, aqui representada por
Instituto de Eletrônica de Potência
39
Projetos de Inversores Monofásicos
_______________________________________________________________
um retificador em ponte completa com filtro capacitivo. Os valores da resistência de carga do
retificador e do capacitor são de R=10Ω e C=3mF.
Tensão de saída - Vo
400
300
Tensão [V]
200
100
0
100
200
300
400
0.0166
0.0208
0.025
0.0291
0.0333
0.0375
0.0417
0.0458
0.05
Tempo [s]
Figura 3.21 – Tensão de saída Vo – carga não-linear.
Tensão na saída do controlador - Vc
12
9
Tensão [V]
6
3
0
3
6
9
12
0.0166
0.0208
0.025
0.0291
0.0333
0.0375
0.0417
0.0458
0.05
Tempo [s]
Figura 3.22 – Tensão na saída do compensador Vc – carga não-linear.
Instituto de Eletrônica de Potência
40
Projetos de Inversores Monofásicos
_______________________________________________________________
4. Restrição da Derivada do Sinal de Controle
O filtro LC é responsável pelo bloqueio dos harmônicos da tensão de saída do inversor. O seu
projeto parte de uma especificação que aceita determinados níveis de ondulação de tensão e corrente
na saída, ou seja, o papel do filtro é atenuar os harmônicos, mas ainda haverá uma pequena parcela dos
harmônicos mais significativos em alta freqüência na tensão de saída do inversor. Isso se reflete
principalmente na ondulação da tensão de saída. A freqüência de ressonância do filtro delimita a sua
banda passante. Sabe-se que para freqüências maiores que esta o sistema apresenta atenuação de 40 dB
por década. A freqüência de corte do filtro é usualmente escolhida em função da freqüência de
comutação, onde geralmente é utilizada a freqüência de corte do filtro no mínimo em uma década
abaixo da freqüência do primeiro harmônico. Esta escolha garante uma boa atenuação dos harmônicos
de tensão sobre a carga e minimiza o volume e peso do filtro.
Mesmo assim, esta aproximação pode em alguns casos não atenuar suficientemente os
harmônicos da tensão de saída. Em termos de sinais de controle, essa ondulação estará presente na
saída do sensor de tensão, que a atenuará, passará pelo subtrator da referência, pelo compensador,
onde pode ser amplificado e por fim é aplicado no modulador. Se a componente em alta freqüência
chegar a este ponto do circuito de controle com uma parcela muito significativa, que se refletirá numa
variação muito acentuada do sinal de controle, que também pode ser designada de uma derivada muito
alta, ele pode provocar múltiplos pulsos indesejáveis nos comandos do inversor.
Como pode ser observado na Figura 4.1, quando a ondulação de tensão na entrada do
modulador, proveniente da ondulação da tensão de saída, apresenta uma derivada relevante, o valor
encontrado na saída do mesmo é muito diferente do valor esperado e adotado na modelagem do
inversor. Em certos casos poderão acontecer pulsos múltiplos que serão enviados para os interruptores
aumentando as perdas por comutação, podendo afetar a forma de onda previamente desejada.
Instituto de Eletrônica de Potência
41
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 4.1 – Sinais do modulador por largura de pulso e sinais de comando com derivada adequada e não adequada [3].
Como pode ser observado na Figura 4.1 para evitar os problemas no modulador a máxima
derivada da tensão de controle deve ser menor que a derivada da onda triangular. Como a derivada do
sinal de controle é uma conseqüência da derivada da variação da tensão de saída, pretende-se
determinar a máxima derivada aceitável nesse sinal, com o objetivo de evitar múltiplos pulsos.
Para se estimar o valor da derivada máxima da tensão de entrada do modulador serão feitas
algumas simplificações. Inicialmente, pode-se supor que a forma de onda da ondulação de tensão em
alta freqüência na saída do inversor é uma senóide conforme a equação (4.1). Está considerando-se
Instituto de Eletrônica de Potência
42
Projetos de Inversores Monofásicos
_______________________________________________________________
como referência a tensão de saída V0(t). A variação de tensão está defasada de 180 graus de V0(t).
Equation Chapter (Next) Section 4
VCf (1 t)
sen(2 s t )
(4.1)
2
O comportamento da amplitude da componente de tensão em alta freqüência foi desenvolvido no
VCf (t)
Capítulo 2.4 e reproduzido na equação (4.2).
VCf (s t)
(Vi Vop ) sen(1 t) (Vop ) sen(1 t)
(4.2)
32 fs2 L f Cf Vi
Substituindo a equação (4.2) em (4.1), tem-se:
(Vi Vop ) sen(1 t) (Vop ) sen(1 t)
sen(2 s t )
(4.3)
64 f s2 Lf Cf Vi
O instante em que houver a máxima variação na tensão de Cf coincide com o instante da máxima
VCf (t)
derivada do sinal de controle. Isso pode ser comprovado analisando os gráficos das Figura 4.2 e Figura
4.3, que representam o comportamento da variação da tensão Cf e a derivada da variação da tensão Cf
em um semiciclo da tensão de saída do inversor. É visível que ambos os sinais possuem os pontos de
maiores variações nos mesmos instantes (ângulos). Estes gráficos foram traçados com os parâmetros
do projeto exemplo da planilha em anexo.
2
1
VCf ( t ) 0
1
2
0.005
0.01
0.015
t
Figura 4.2 – Comportamento da variação da tensão de Cf em um semiciclo da tensão de saída do inversor.
Instituto de Eletrônica de Potência
43
Projetos de Inversores Monofásicos
_______________________________________________________________
d
dt
4 10
5
2 10
5
VCf ( t )
0
5
2 10
5
4 10
0.005
0.01
0.015
t
Figura 4.3 – Comportamento da derivada da variação da tensão de Cf em um semiciclo da tensão de saída do inversor.
A máxima variação da ondulação em Cf é definida no capítulo 2.4 como:
Vi
(4.4)
128 f Lf Cf
Substituindo (4.4) em (4.1), obtém-se a expressão para VCf (t) no instante de maior variação da
VCf max
2
s
tensão do capacitor Cf:
Vi
(4.5)
sen(2 s t )
128 f Lf Cf
A máxima derivada do sinal de controle é calculada para o instante de maior variação da tensão
VCf max (t)
2
s
do capacitor Cf, isso permite usar a equação (4.5). A variação do sinal de controle é definida pela
equação (4.6). O transdutor de tensão comporta-se apenas como ganho (ATv) para toda a faixa de
freqüência. O compensador CV(s) contribui com o ganho kCv e uma fase Cv na freqüência de
ondulação do sinal de controle. O ganho e a fase do compensador são definidos nas equações (4.7) e
(4.8).
VCmax (t)
Vi
A Tv k Cv sen(2 s t Cv )
128 f L f Cf
2
s
k Cv C V (s) s 2 j
s
(4.6)
(4.7)
Instituto de Eletrônica de Potência
44
Projetos de Inversores Monofásicos
_______________________________________________________________
Cv C V (s)s 2 j
(4.8)
s
A partir da equação (4.6) é possível calcular a derivada da máxima variação do sinal de controle,
definido na equação (4.9).
Vi
d
(4.9)
VC max (t)
A Tv k Cv cos(2 s t Cv )
dt
32 f s Lf Cf
A máxima derivada da máxima variação do sinal de controle, definida na equação (4.10),
ocorrerá no instante que o cos(2 s t Cv ) for igual a um.
d
Vi
(4.10)
VC max (t)
A Tv k Cv
dt
32 f s Lf Cf
Para não haver possibilidade de haver pulsos múltiplos a derivada do sinal de controle deve ser
menor que a derivada do sinal modulador, que nesse caso é uma onda triangular. A derivada da onda
triangular é definida na equação (4.11).
4 Vp
d
(4.11)
Vtri
4 Vp f s
dt
Ts
A condição da equação (4.12) deve ser atendida para não haver possibilidade de pulsos múltiplos
no inversor:
Vi
(4.12)
A Tv k Cv 4 Vp f s
32 f s Lf Cf
Como pode ser observada na equação (4.10), a derivada máxima na entrada do modulador
depende dos parâmetros do filtro e do compensador. Quando houver a necessidade de diminuir a
derivada na entrada do modulador pode-se alterar uma série de variáveis. Normalmente o ajuste é feito
no capacitor do filtro de saída, e quanto maior o valor da capacitância menor a ondulação de tensão, ou
aumentando a atenuação do compensador na freqüência de ondulação. A mudança no valor do
capacitor altera a função de transferência da planta e, conseqüentemente, também a função de
transferência do controlador. A mudança no ganho do compensador diminui a freqüência de corte,
consequentemente a banda passante do sistema compensador e isso podem provocar outros
inconvenientes. A solução deste problema pode ser feita por meio de iterações, alterando parâmetros
da planta e/ou do controlador em busca de bons resultados.
Na planilha em anexo são desenvolvidos dois gráficos em função dos parâmetros da planta e do
compensador que mostram o quão distante a derivada máxima do sinal de controle está do limiar de
Instituto de Eletrônica de Potência
45
Projetos de Inversores Monofásicos
_______________________________________________________________
tornar a equação (4.12) falsa. Estes gráficos são apresentados nas Figura 4.4 e Figura 4.5 para o
exemplo de projeto da planilha. A Figura 4.4 apresenta o valor das derivadas do sinal de controle e da
triangular em função da alteração do valor da capacitância de Cf. Esta figura mostra a possibilidade de
alteração no valor de Cf para a restrição da derivada do sinal de controle. A Figura 4.5 mostra o
comportamento das derivadas em função da freqüência de cruzamento, que altera o ganho do
compensador na freqüência dos sinais analisados. Estes gráficos auxiliam o projetista a verificar a
sensibilidade do projeto e a margem de ajuste que ele pode ter.
É importante salientar que o não cumprimento da equação (4.12) acarreta na possibilidade de
haver múltiplos pulsos, mas não necessariamente irá acontecer. A defasagem na variação do sinal de
controle introduzido pelo compensador Cv , definida na equação (4.8), pode evitar o aparecimento dos
pulsos múltiplos mesmo quando a equação (4.12) torna-se falsa. Como o objetivo é garantir o não
aparecimento do problema dos pulsos múltiplos e deixar o sistema o mais robusto possível, optou-se
em fazer a restrição do sinal de controle analisando apenas o módulo dos sinais, e a fase, que neste
caso somente ajuda na solução do problema, fica como margem de segurança.
1 10
6
7.53 10
5
DVc( Cf2 fc fs )
5
5.05 10
DVtri
2.58 10
5
4
1 10
7
1 10
1 10
6
1 10
5
1 10
4
Cf2
Figura 4.4 – Derivada do sinal de controle e derivada do sinal modulador em função da variação de Cf.
Instituto de Eletrônica de Potência
46
Projetos de Inversores Monofásicos
_______________________________________________________________
1 10
6
7.53 10
5
fc
DVc( Cf fc2 fs )
5
5.05 10
DVtri
2.58 10
5
4
1 10
3
1 10
1 10
4
5
1 10
fc2
Figura 4.5 – Derivada do sinal de controle e derivada do sinal modulador em função da freqüência de cruzamento do
compensador.
4.1. Simulação para a Restrição da Derivada do Sinal de Controle
Segundo o capítulo 4 o projeto-exemplo atende a restrição da máxima derivada. Esse resultado
foi conferido por simulação e apresentado na Figura 4.6, que mostra o sinal de controle, a onda
triangular da portadora e os sinais de pulsos do interruptor S1, para o período de maior variação da
tensão de saída do inversor. É possível verificar que a derivada do sinal de controle é menor que a da
onda triangular e que não está havendo múltiplos pulsos.
A Figura 4.7 apresenta um exemplo de um projeto em que a restrição da máxima derivada do
sinal de controle não é atendida. É possível verificar o sinal de controle cruzando várias vezes a onda
triangular no mesmo período, ocasionando múltiplos pulsos, que são aplicados nos interruptores e
causando o mau funcionamento do inversor. Essa situação indesejada pode acontecer se o projeto não
for bem executado.
Instituto de Eletrônica de Potência
47
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 4.6 – Sinal de controle Vc, sinal triangular Vtr1 e sinal de comando do interruptor S1.
Figura 4.7 – Sinal de controle Vc, sinal triangular Vtr1 e sinal de comando do interruptor S1 para um caso com múltiplos
pulsos do sinal de controle.
Instituto de Eletrônica de Potência
48
Projetos de Inversores Monofásicos
_______________________________________________________________
5. Inversor Monofásico Alimentando uma Carga Não Linear
Para a análise do inversor alimentando carga não-linear foi empregado como carga um circuito
retificador em ponte com filtro capacitivo conforme Figura 5.1.
Figura 5.1 – Carga não linear.
Instituto de Eletrônica de Potência
49
Projetos de Inversores Monofásicos
_______________________________________________________________
O formato da corrente iLo para diversos valores de indutância do indutor Lo é apresentado na
Figura 5.2.
Figura 5.2 – Tensão na saída do inversor e corrente de carga.
O projeto de inversores para alimentar cargas não-lineares deve prever a menor distorção
harmônica possível na tensão de saída deste, ou limitá-la a valores aceitáveis comercialmente.
A variável mais significativa na introdução de distorção harmônica na tensão é a derivada da
corrente de carga, pois exigirá respostas rápidas tanto do compensador de tensão como da planta. É
imperativo portanto conhecer estas derivadas: da corrente de carga, da planta e do compensador.
Para limitar os valores de derivada da corrente de carga e com isso possibilitar menor distorção
harmônica da tensão de saída, é introduzido um indutor entre a saída do inversor e a carga não-linear.
Para determinar o valor desta indutância parte-se de grandezas que podem ser determinadas a
partir de especificações do projeto, como o fator de crista da corrente e a corrente eficaz na saída do
inversor.
Instituto de Eletrônica de Potência
50
Projetos de Inversores Monofásicos
_______________________________________________________________
Conforme é apresentado no Capítulo 2.4, a corrente no indutor do retificador de onda completa
pode ser expressa pela equação (5.1). Equation Chapter (Next) Section 5
iLo t
Vop cos t cos 1 Vcc 1 t
Lo
(5.1)
Onde;
Vcc
V
op
1 sin 1
(5.2)
A máxima corrente de carga ocorre em 2, conforme a expressão (5.3).
2 1
(5.3)
Substituindo a equação (5.3) em (5.1), obtém-se (5.4).
IpLo 2
2 cos 1 Vop Vcc 21
Lo
(5.4)
A partir da potência aparente que é fornecida pelo inversor – especificação de projeto – pode-se
determinar a corrente eficaz de carga, para isso é necessário conhecer a tensão eficaz na saída do
inversor. A equação (5.5) mostra como determinar o valor da corrente eficaz na saída do inversor.
S ret
Vef op
Seja o fator de crista definido pela expressão:
Ief Lo
fc
IpLo
Ief LO
(5.5)
(5.6)
A indutância de entrada necessária para um dado fator de crista é:
fc Ief Lo
2 cos 1 Vop Vcc 21
Lo
(5.7)
Instituto de Eletrônica de Potência
51
Projetos de Inversores Monofásicos
_______________________________________________________________
Lo
2 cos 1 Vop Vcc 21
fc Ief Lo
(5.8)
Avaliando-se o comportamento da corrente no indutor do filtro de saída -Lf – pode-se determinar
a máxima derivada de corrente que pode ser fornecida pelo inversor na subida da corrente de carga. A
equação (5.9) mostra a capacidade que o inversor possui em fornecer derivada de corrente de carga,
trata-se, portanto de um limite.
diLf
nVi Vop sin r t
(5.9)
dt
Lf
Avaliando a máxima derivada de corrente solicitada pela carga não-linear na subida da corrente
de carga, obtém-se expressão (5.10).
diLo Vop sin r t Vcc
dt
Lo
(5.10)
De maneira análoga o comportamento da corrente no indutor do filtro de saída -Lf – deve ser
avaliado também na descida da corrente de carga. A equação (5.11) apresenta a capacidade que o
inversor possui em fornecer derivada de corrente de carga.
diLf
nVi Vop sin r t
(5.11)
dt
Lf
Avaliando também a máxima derivada de corrente solicitada pela carga não-linear na descida da
corrente de carga, obtém-se expressão (5.12).
diLo Vcc Vop sin r t
(5.12)
dt
Lo
É importante salientar que a capacidade de fornecer derivada na derivada na subida da corrente
de carga é diferente da capacidade de fornecer derivada na descida da corrente de carga, como
demonstram as expressões (5.9) e (5.11). O mesmo raciocínio pode ser estendido às derivadas da
corrente da carga não-linear, conforme as equações (5.10) e (5.12).
O comportamento da tensão na saída do inversor, da corrente de carga, da derivada máxima de
corrente que o inversor pode fornecer e da derivada da corrente de carga é mostrado na Figura 5.3. As
curvas foram traçadas com as equações deduzidas acima.
Instituto de Eletrônica de Potência
52
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 5.3 – Tensão na saída do inversor e corrente de carga.
A partir da análise da Figura 5.3 é possível verificar que a máxima derivada na subida da
corrente de carga ocorre em
2
, conforme é apresentado na equação (5.13).
r tmx
(5.13)
2
Substituindo a expressão (5.13) nas equações (5.9) e (5.10), obtêm-se as expressões (5.14) e
(5.15), que indicam o ângulo em que a capacidade de fornecer a derivada de corrente na saída do
inversor deve ser comparada com a derivada da corrente de carga.
diLf
dt
mx
nVi Vop
Lf
(5.14)
Instituto de Eletrônica de Potência
53
Projetos de Inversores Monofásicos
_______________________________________________________________
V V
diLo
(5.15)
mx op cc
dt
Lo
Para que haja distorção harmônica na tensão de saída do inversor em virtude da saturação do
compensador de tensão deve-se obedecer a condição estabelecida na equação (5.16). Esta restrição se
aplica para a subida da corrente de carga.
di
diLo
mx Lf mx
dt
dt
(5.16)
Manipulando a equação (5.16) pode-se definir a relação da equação (5.17).
Lo Vop Vcc
L f nVi Vop
(5.17)
5.1. Resultados de Simulação com Carga Não-Linear
Para validar a metodologia empregada na análise teórica foram realizadas simulações do
inversor operando em malha fechada e alimentando carga não-linear. A carga não-linear adotada para
todas as simulações é um retificador monofásico em ponte com filtro capacitivo. Esta estrutura foi
adotada pois representa certamente a maioria das situações de carga não-linear a que o inversor estará
sujeito em aplicações comerciais.
5.1.1. Carga não-linear – retificador com fonte de tensão
Para a primeira situação simulada o filtro capacitivo do retificador foi substituído por uma fonte
de tensão conforme é apresentado na Figura 5.4, obedecendo desta forma a simplificação também
adotada na análise teórica. O valor da fonte de tensão [V] empregada na simulação é de 300 Vdc e Lo
= 75 µH.
As especificações para o inversor de tensão são idênticas para todas as condições de carga:
Tensão de entrada do inversor → Vi = 400V;
Indutor do filtro do inversor → Lf = 260µH;
Capacitor do filtro do inversor → Cf = 9,7µF;
Freqüência de comutação dos interruptores do inversor → fs = 20KHz;
Potência aparente na saída do inversor → Po = 10KVA;
Instituto de Eletrônica de Potência
54
Projetos de Inversores Monofásicos
_______________________________________________________________
Tensão eficaz na saída do inversor → Vo = 220V.
Figura 5.4 – Estrutura simplificada empregada na simulação.
Na Figura 5.5 são apresentadas as formas de onda da tensão na saída do inversor e a corrente na
entrada do retificador. A característica não-linear da corrente de carga pode ser observada, como
também é perceptível pequena distorção na forma de onda da tensão.
Figura 5.5 – Tensão na saída do inversor e corrente na carga do mesmo.
Instituto de Eletrônica de Potência
55
Projetos de Inversores Monofásicos
_______________________________________________________________
O fator de crista da forma de onda da corrente de carga é de 3 e a distorção harmônica total da
tensão na saída do inversor é menor que 1%.
As figuras a seguir apresentam a potência aparente na saída do inversor e o fator de potência,
respectivamente.
Figura 5.6 – Potência aparente e fator de potência na saída do inversor.
O espectro harmônico da tensão na saída do inversor é apresentado na Figura 5.7 . É possível
Amplitude
observar o baixo conteúdo harmônico presente na tensão de saída do inversor - DHT=0,977%.
0.005
0
0
5000
1 10
4
1.5 10
4
2 10
4
2.5 10
4
3 10
4
3.5 10
4
4 10
4
Frequência
Figura 5.7 - Espectro harmônico presente na tensão de saída do inversor.
4.5 10
4
5 10
4
Instituto de Eletrônica de Potência
56
Projetos de Inversores Monofásicos
_______________________________________________________________
5.1.2. Carga não-linear – retificador com filtro capacitivo
O circuito empregado para simulação onde não se adota a simplificação anterior é apresentado
na figura a seguir. Verifica-se que a fonte de tensão foi substituída pelo capacitor [C] e o resistor [R]
de valores 7mF e 16,5Ω, respectivamente. Os demais valores permanecem inalterados.
Figura 5.8 – Estrutura empregada na simulação.
Na Figura 5.9 são apresentados as formas de onda da tensão na saída do inversor e a corrente na
entrada do retificador com filtro capacitivo.
O fator de crista da corrente na saída do inversor é 3 e a distorção harmônica total na tensão de
saída é aproximadamente 1%.
Instituto de Eletrônica de Potência
57
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 5.9 – Tensão na saída do inversor e corrente na carga do mesmo.
Na seqüência é apresentada na Figura 5.10 a potência absorvida pela carga do inversor e seu
fator de potência.
Figura 5.10 – Potência aparente e fator de potência na saída do inversor.
Instituto de Eletrônica de Potência
58
Projetos de Inversores Monofásicos
_______________________________________________________________
A distorção harmônica total e o conteúdo harmônico da tensão de saída do inversor apresentam
pouca alteração se comparados aos resultados obtidos na simulação anterior. Isto demonstra a validade
Amplitude
do modelo simplificado apresentado na análise teórica.
0.005
0
0
5000
1 10
4
1.5 10
4
2 10
4
2.5 10
4
3 10
4
3.5 10
4
4 10
4
4.5 10
4
5 10
4
Frequência
Figura 5.11– Espectro harmônico presente na tensão de saída do inversor – DHT=1,004%.
5.1.3. Carga não-linear com alteração de Lo (35µH)
Nas simulações anteriores pode-se verificar a boa resposta do inversor quando este alimenta
carga não-linear, desde que respeitadas algumas restrições de projeto. Na análise teórica foi
demonstrado que uma restrição importante é a da derivada de corrente de carga ser menor que a
derivada que a planta pode fornecer, principalmente para que não haja geração de múltiplos pulsos no
comando dos interruptores.
Um dos elementos importantes na limitação da derivada da corrente de carga é o indutor Lo.
Nesta etapa da simulação será mostrado o impacto sobre a distorção harmônica da tensão de saída do
inversor quando o indutor Lo é reduzido a valores que permitam derivadas muito próximas às da
capacidade da planta.
Na Figura 5.12 é mostrado o comportamento da derivada da corrente de carga, derivada máxima
de corrente da planta quando houver possibilidade de regeneração de energia e derivada máxima de
corrente da planta quando não houver possibilidade de regeneração de energia.
Pode-se verificar que a derivada de corrente da planta ainda é ligeiramente superior à da
derivada da corrente de carga. Isto significa que se a dinâmica do compensador de tensão estiver
corretamente ajustado, o inversor fornecerá tensão na saída com pequena distorção harmônica.
Instituto de Eletrônica de Potência
59
Projetos de Inversores Monofásicos
_______________________________________________________________
5 10
5
0
5
5 10
diLom( )
6
1 10
diLf ( )
diLfa( )
6
1.5 10
6
2 10
6
2.5 10
6
3 10
0
0.5
1
1.5
2
2.5
3
3.5
Derivada da corrente de carga
Derivada da planta - com regeneração instantânea
Derivada da planta - sem regeneração instantânea
Figura 5.12 – Comportamento das derivadas de corrente de carga e da planta.
A Figura 5.13 mostra a tensão na saída do inversor e a corrente absorvida pela carga. Com a
redução do valor do indutor Lo de 75µH para 35 µH é possível perceber pequeno aumento na
distorção harmônica da tensão de saída. Esta distorção não guarda relação com a derivada da corrente
de carga, mas está relacionada ao aumento da derivada quando a corrente de carga se anula. Este fato
pode ser verificado também a partir da análise do comportamento do sinal de controle Vc que não
possui distorção nos pontos de derivada máxima de subida e de descida da corrente de carga e sim na
extinção da corrente de carga.
Instituto de Eletrônica de Potência
60
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 5.13 – Tensão na saída do inversor, corrente na carga e sinal de controle.
A Figura 5.14 mostra o conteúdo harmônico presente na tensão de saída do inversor quando este
alimenta um retificador em ponte. Pode ser observado um ligeiro aumento da distorção harmônica
Amplitude
total causada pela redução do valor de Lo.
0.005
0
0
5000
1 10
4
1.5 10
4
2 10
4
2.5 10
4
3 10
4
3.5 10
4
4 10
4
4.5 10
4
5 10
4
Frequência
Figura 5.14 – Conteúdo harmônico na tensão de saída do inversor – DHT=1,85%.
5.1.4. Carga não-linear com alteração de Lo (15µH)
Reduzindo ainda mais o valor do indutor Lo, pode-se observar pela Figura 5.15 que a derivada
da corrente de carga é maior do que a máxima derivada que a planta pode fornecer.
Instituto de Eletrônica de Potência
61
Projetos de Inversores Monofásicos
_______________________________________________________________
6
1 10
5
5 10
0
5
diLom( )
diLf ( )
5 10
6
1 10
diLfa( )
6
1.5 10
6
2 10
6
2.5 10
6
3 10
0
0.5
1
1.5
2
2.5
3
3.5
Derivada da corrente de carga
Derivada da planta - com regeneração instantânea
Derivada da planta - sem regeneração instantânea
Figura 5.15 - Comportamento das derivadas de corrente de carga e da planta.
Na Figura 5.16 é possível observar o comportamento da corrente de carga e da tensão de saída
do inversor. Nota-se significativo aumento do valor de pico da corrente de carga, isto introduz
distorção ao sinal de controle Vc o que acarreta maior distorção harmônica da tensão na saída do
inversor.
Instituto de Eletrônica de Potência
62
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 5.16 – Tensão de saída do inversor, corrente de carga e tensão de controle.
Figura 5.17 – Detalhe da tensão de saída com distorção.
A Figura 5.18 apresenta a tensão de controle e a tensão na entrada do filtro do inversor (tensão
Vab). É possível verificar a saturação do sinal de controle nos pontos de máxima derivada da corrente
de carga – A máxima derivada da corrente de carga coincide com o pico da tensão senoidal na saída do
Instituto de Eletrônica de Potência
63
Projetos de Inversores Monofásicos
_______________________________________________________________
inversor. Observa-se ainda a inversão dos pulsos da tensão Vab durante a derivada negativa da
corrente de carga. A Figura 5.19 mostra com detalhe a inversão dos pulsos da tensão VAB durante a
derivada negativa da corrente de carga. Nessa figura também é mostrado a corrente de entrada do
inversor, que é negativa durante a inversão dos pulsos da tensão VAB, ou seja, está havendo
regeneração instantânea de potência nesses períodos.
Figura 5.18– Tensão de controle Vc e tensão na entrada do filtro.
Instituto de Eletrônica de Potência
64
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 5.19– Corrente na entrada do inversor e tensão na entrada do filtro.
A figura a seguir mostra o conteúdo harmônico presente na tensão de saída do inversor. A
Amplitude
distorção harmônica total é de 3,6%.
0.005
0
0
5000
1 10
4
1.5 10
4
2 10
4
2.5 10
4
3 10
4
3.5 10
4
Frequência
Figura 5.20 – Conteúdo harmônico da tensão de saída.
4 10
4
4.5 10
4
5 10
4
Instituto de Eletrônica de Potência
65
Projetos de Inversores Monofásicos
_______________________________________________________________
Equation Chapter 6 Section 6
6. Estudo de Perdas
Para tornar um projeto factível é necessário que todos os componentes sejam adequadamente
dimensionados, e no caso dos semicondutores do estágio de potência deve-se dimensionar também o
dissipador de calor.
Nesta seção será realizado o estudo das perdas nos semicondutores do estágio de potência para
que seja possível determinar a potência perdida na condução e nas comutações dos interruptores
durante a operação do inversor. Estes cálculos são fundamentais para o correto dimensionamento do(s)
dissipador(es) de calor.
6.1. Estudo das Perdas nos Semicondutores
Escolhidos os semicondutores a serem empregados no inversor, o passo seguinte é determinar o
cálculo de suas perdas, para poder dimensionar o dissipador adequado com o objetivo de manter a
temperatura dos interruptores dentro de seus limites de operação.
As perdas nos semicondutores podem ser divididas em dois tipos, perdas por condução e perdas
por comutação. Para determinar as perdas é necessário conhecer a corrente que circula através dos
interruptores. Neste trabalho será feito o cálculo de perdas considerando carga puramente resistiva na
saída do inversor.
6.1.1. Perdas por Condução.
1.a) Perdas no IGBT
Considerando o inversor operando em malha fechada, a tensão de saída é dada pela seguinte
expressão:
(6.1)
vo Vop sin
A corrente de saída do inversor para uma carga puramente resistiva pode ser expressa através de:
io I CM sin
Para a mesma carga a razão cíclica é dada pela seguinte expressão:
(6.2)
Instituto de Eletrônica de Potência
66
Projetos de Inversores Monofásicos
_______________________________________________________________
d
Vop
sin
(6.3)
Vi
A queda de tensão no IGBT é determinada em função da corrente do coletor [8] e [9].
VCEN VCO
iC VCO
(6.4)
I CN
A energia média instantânea por período de comutação pode ser calculada através da seguinte
vce
expressão:
(6.5)
Ei vce iC tScon
Onde tScon é o tempo de condução do interruptor em um período de comutação.
t Scon 1 d
Ts
2
Substituindo a expressão (6.6) em (6.5), obtém-se:
(6.6)
Ei vce iC 1 d
Ts
(6.7)
2
Para uma freqüência de comutação muito maior que a freqüência da rede (fs>>fr), tem-se:
Ei
1
vce iC 1 d
t
2
(6.8)
t Ts
(6.9)
Onde:
Logo a potência instantânea será:
dEi Ei
(6.10)
t
dt
A potência média perdida no interruptor por condução em cada ciclo da rede será:
Pi
PScon
1
2
0
vce iC
1 d d
2
(6.11)
Substituindo:
PScon
1
4
0
VCEN VCO
Vop
I CM sin VCO I CM sin 1
sin d (6.12)
I CN
Vi
Resolvendo:
1 M VCEN VCO
1 M
VCO I CM
PScon
I CM 2
I CN
8 3
2 8
Onde M é o índice de modulação definido pela equação:
(6.13)
Instituto de Eletrônica de Potência
67
Projetos de Inversores Monofásicos
_______________________________________________________________
M
Vop
(6.14)
Vi
1.b) Perdas no diodo
Da mesma forma que no caso do interruptor, pode-se determinar as perdas por condução no
diodo empregando a mesma metodologia.
No caso do diodo o tempo de condução dele é o tempo complementar da condução do
interruptor num período de comutação, assim:
t Dcon Ts t Scon
(6.15)
t Dcon 1 d
(6.16)
Ou;
Ts
2
Logo a potência média num período da rede será:
PDcon
1
2
0
vce iC
1 d d
2
(6.17)
Resolvendo:
1 M VFN VFO
1 M
PDcon
I CM 2
VFO I CM
8 3 I FN
2 8
É importante frisar que IFN é igual à ICN.
(6.18)
6.1.2. Perdas por Comutação
2a) Perdas no IGBT
No interruptor as perdas por comutação são originadas pela sua entrada em condução e o
bloqueio. Inicialmente serão analisadas as perdas por entrada em condução e posteriormente as perdas
devido o bloqueio.
Perdas por entrada em condução do IGBT
A representação da entrada em condução de um IGBT pode ser observada na figura a seguir:
Instituto de Eletrônica de Potência
68
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 6.1 – Detalhe da entrada em condução do IGBT (Referência [10]).
Aproximação:
Figura 6.2 Aproximação entrada em condução do IGBT adotada para o equacionamento.
Instituto de Eletrônica de Potência
69
Projetos de Inversores Monofásicos
_______________________________________________________________
A potência média no IGBT na entrada em condução pode ser calculada através da energia total
para um ciclo completo da tensão de saída do inversor. Logo, a energia produzida na entrada em
condução do interruptor é dada pela seguinte expressão:
t2
ESon Vi iC t dt
(6.19)
t0
Devido à tensão de entrada ser constante tem-se:
t2
t1
(6.20)
ESon Vi iC t dt iC t dt
t
t
1
0
Segundo a Figura 6.2 , a integral da corrente representa a área descrita pela curva:
ESon Vi A B C
(6.21)
Resolvendo para área “A”:
A
iC tr
2
(6.22)
tr
trN
iC
I CN
(6.23)
iC trN
iC
2 I CN
(6.24)
Onde:
Assim:
A
Resolvendo para área “B”:
I rr ta
2
Segundo[8], pode-se utilizar a seguinte aproximação:
(6.25)
ta trr
Conforme [8], trr pode ser descrito pela equação (6.27):
(6.26)
B
i
trr 0.8 0.2 C
trrN
I CN
(6.27)
Logo:
iC
I rr
0.8 0.2
trrN
2
I CN
Em [8] define-se a corrente Irr como sendo:
B
(6.28)
Instituto de Eletrônica de Potência
70
Projetos de Inversores Monofásicos
_______________________________________________________________
i
I rr 0.7 0.3 C
I rrN
I CN
Assim a área “B” pode ser escrita como:
i
iC
1
B 0.7 0.3 C
0.8 0.2
trrN I rrN
2
I CN
I CN
2
iC
iC
B 0.28 0.19
0.03
trrN I rrN
I CN
I CN
Resolvendo para área “C”:
C iC ta
(6.29)
(6.30)
(6.31)
(6.32)
Pode-se escrever:
i
C iC 0.8 0.2 C
trrN
I CN
Substituindo as equações (6.24), (6.31) e (6.33) em (6.21), obtém-se:
2
i t
iC
iC
C
rN
0.03
iC 0.28 0.19
Q
rrN
I CN
I
2 I CN
CN
ESon Vi
iC
iC 0.8 0.2
trrN
I CN
Considerando fs>>fr.
dESon ESon
dt
Ts
A potência instantânea pode ser descrita pela expressão (6.36):
(6.33)
(6.34)
(6.35)
dESon
(6.36)
dt
A potência média pode ser obtida integrando-se a potência instantânea em um semiciclo da
pSon
tensão de saída do inversor:
1
pSon d
2 0
Substituindo (6.36), (6.35) e (6.34) em (6.37), tem-se:
PSTon
(6.37)
Instituto de Eletrônica de Potência
71
Projetos de Inversores Monofásicos
_______________________________________________________________
2
i t
iC
iC
C
rN
0.03
iC 0.28 0.19
Q
rrN
I CN
1 Vi 2 I CN
I CN
PSTon
d (6.38)
2 Ts 0
iC
iC 0.8 0.2
trrN
I CN
Resolvendo (6.38):
PSTon
2
I CM
I CM
trrN
1 Vi trN
2
2
1.6
0.1
I CM QrrN 0.28 0.38
I
t
I
0.015
CM rrN
CM
2 Ts 4 I CN
I CN
I CN
I CN
(6.39)
Perdas no Bloqueio IGBT
A energia perdida durante o bloqueio do IGBT é descrita pela equação (6.40).
Vi iC
tf
2
De acordo com [8], tf pode ser descrito como:
ESoff
2 1 i
tf C
t fN
3 3 I CN
Fazendo a substituição da expressão (6.41) em (6.40) chega-se em (6.42).
ESoff
Vi iC 2 1 iC
t fN
2 3 3 I CN
(6.40)
(6.41)
(6.42)
Considerando fs>>fr:
Vi iC 2 1 iC
t fN
2Ts 3 3 I CN
dt
A potência instantânea é definida como:
dESoff
pSoff
dESoff
dt
Calculando a potência média a partir da potência instantânea:
(6.43)
(6.44)
1 Vi iC 2 1 iC
(6.45)
t fN
2 0 2Ts 3 3 I CN
Resolvendo a expressão anterior obtém-se potência perdida no bloqueio do IGBT:
PSoff
PSoff
Vi f s
12
I CM 2 t fN
4 I CM
2 I CN
(6.46)
Instituto de Eletrônica de Potência
72
Projetos de Inversores Monofásicos
_______________________________________________________________
2b) Perdas no Diodo
No diodo as perdas por comutação são originadas pelo seu bloqueio. Este componente não
apresenta perdas por entrada em condução.
Perdas no Bloqueio do Diodo
As perdas de bloqueio do diodo são proporcionais a sua característica de recuperação. A área
“B” da Figura 6.2 mostra o comportamento da corrente de recuperação do diodo e representa as perdas
perdidas por ele durante o bloqueio. Vale ressaltar que o diodo não apresenta perdas na entrada em
condução.
Seguindo o mesmo procedimento descrito no item “Perdas de comutação do IGBT”, onde foram
calculadas as perdas referentes à área B, encontra-se a expressão (6.47) que descreve as perdas de
bloqueio do diodo.
PDoff
2
I CM
I CM
1 Vi
QrrN 0.28 0.38
0.015
2 Ts
I CN
I CN
(6.47)
6.1.3. Perdas Totais nos Semicondutores do Estágio de Potência de um Inversor Monofásico
As perdas totais nos semicondutores do estágio de potência de um inversor monofásico em ponte
completa com saída senoidal – modulação senoidal 3 níveis – podem ser calculadas multiplicando-se
por quatro as perdas em cada semicondutor. Isto é possível devido à simetria existente na estrutura em
ponte completa e em sua operação. A expressão (6.48) representa as perdas totais nos semicondutores.
(6.48)
Ptotal 4 PS 4 PD
Substituindo as equações (6.13), (6.39), (6.46), (6.18) e (6.47) na equação (6.48), obtém-se a
expressão (6.49).
Ptotal 4 PScon PSTon PSoff 4 PDcon PDoff
(6.49)
Instituto de Eletrônica de Potência
73
Projetos de Inversores Monofásicos
_______________________________________________________________
6.2. Dimensionamento Térmico – Exemplo de Projeto
Tendo-se definidas as perdas nos semicondutores é necessário o dissipador adequado para
manter as temperaturas dos componentes dentro dos níveis adequados.
Optou-se pelo emprego de um único dissipador para acomodar os dois módulos. O circuito
térmico equivalente para esta configuração é mostrado na Figura 6.3. Como as resistências térmicas de
junção-cápsula e cápsula-dissipador são fornecidas pelo fabricante do semicondutor, resta calcular a
resistência térmica dissipador-ambiente necessária para manter a temperatura de junção dos
componentes dentro dos níveis adequados.
No item 6.1 foi escolhido o módulo de IGBT da International Rectifier cujo código é
GA250TS60U, esta escolha é uma opção do projetista e deve considerar aspectos tecnológicos e de
custos. Cada módulo é composto por dois IGBTs e dois diodos de roda livre, formando um braço do
inversor.
RjcIGBT1
Tj1
PTigbt
RjcIGBT2
Tj2
PTigbt
Rcd1
Tc1
RjcDIODO1
Tj3
PTdiodo
2PTdiodo+2PTigbt
RjcDIODO2
Tj4
PTdiodo
Rda
Td
RjcIGBT3
Tamb
Tj5
PTigbt
4PTdiodo+4PTigbt
RjcIGBT4
Tj6
Rcd2
PTigbt
Tc2
RjcDIODO3
Tj7
PTdiodo
2PTdiodo+2PTigbt
RjcDIODO4
Tj8
PTdiodo
Figura 6.3 – Circuito térmico equivalente para dois módulos em um dissipador.
O procedimento para definir a resistência térmica necessária do dissipador segue a seguir.
A partir da temperatura máxima de junção definida para o IGBT e diodo é possível calcular a
temperatura de cápsula para cada um dos componentes. São conhecidas as resistências térmicas dos
semicondutores e suas perdas:
Instituto de Eletrônica de Potência
74
Projetos de Inversores Monofásicos
_______________________________________________________________
Tcigbt Tjigbt R jcigbt PTigbt
(6.50)
Tcdiodo Tjdiodo R jcdiodo PTdiodo
(6.51)
Adota-se a maior temperatura de cápsula entre o IGBT e o diodo como a temperatura de cápsula
do módulo.
(6.52)
Tc Tcigbt
A partir da temperatura de cápsula do módulo é possível definir a temperatura do dissipador.
Td Tc R cd 2 PTigbt 2 PTdiodo
(6.53)
Com a temperatura do dissipador, e definida a temperatura ambiente em que o inversor irá
operar, define-se a resistência térmica necessária para o dissipador:
R da
Td Ta
4 PTigbt 4 PTdiodo
(6.54)
Alguns fabricantes disponibilizam a resistência térmica de cápsula-ambiente do dissipador, que é
definida como:
R ca R cd R da
(6.55)
Com a equação (6.54) ou equação (6.55) é possível definir o dissipador necessário para o
inversor.
Ao escolher o dissipador, deve-se conferir como serão os valores das temperaturas no dissipador,
na cápsula e na junção. As equações (6.56), (6.57), (6.58) e (6.59) calculam essas temperaturas
utilizando a resistência térmica do dissipador escolhido:
Td Ta R da 4 PTigbt 4 PTdiodo
(6.56)
Tc Td R cd 2 PTigbt 2 PTdiodo
(6.57)
Tjigbt Tc R jcigbt PTigbt
(6.58)
Tjdiodo Tc R jcdiodo PTdiodo
Os valores devem estar abaixo dos limites definidos pelo fabricante.
(6.59)
Pode-se adotar outras configurações para montar o estágio de potência: emprego de
componentes discretos ou de um único módulo com todos os componentes. A Figura 6.4 apresenta o
circuito térmico equivalente para o caso do emprego de componentes discretos e Figura 6.5 mostra o
Instituto de Eletrônica de Potência
75
Projetos de Inversores Monofásicos
_______________________________________________________________
circuito térmico equivalente ao utilizar um único módulo. Para ambas as situações considerou-se o
emprego de um único dissipador.
RcdIGBT1
RjcIGBT1
Tc1
Tj1
P1
RjcIGBT2
Tj2
RcdIGBT2
Tc2
P2
RjcIGBT3
RcdIGBT3
Tc3
Tj3
P3
RcdIGBT4
RjcIGBT4
Tc4
Tj4
Rda
P4
RjcDIODO1
Tj5
Td
Tc5
Tamb
RcdDIODO1
4P+4PD
PD1
RjcDIODO2
RcdDIODO2
Tc6
Tj6
PD2
RjcDIODO3
RcdDIODO3
Tc7
Tj7
PD3
RjcDIODO4
RcdDIODO4
Tc8
Tj8
PD4
Figura 6.4 - Circuito térmico equivalente usando componentes discretos em um dissipador.
RjcIGBT1
Tj1
PTigbt
RjcIGBT2
Tj2
PTigbt
RjcDIODO1
Tj3
PTdiodo
RjcDIODO2
Tj4
PTdiodo
Rcd
Rda
Td
Ta
RjcIGBT3
Tj5
4PTdiodo+4PTigbt
PTigbt
RjcIGBT4
Tj6
PTigbt
RjcDIODO3
Tj7
PTdiodo
RjcDIODO4
Tj8
PTdiodo
Figura 6.5 Circuito térmico equivalente para um módulo em um dissipador.
Instituto de Eletrônica de Potência
76
Projetos de Inversores Monofásicos
_______________________________________________________________
7. Introdução ao Estudo do Paralelismo de Inversores
Para iniciar o estudo do paralelismo de inversores é necessário verificar qual o problema deste
tipo de configuração, por isso a seguir serão apresentadas algumas simulações com este objetivo. Após
esta etapa será feito um estudo matemático simplificado do problema.
7.1. Problema da operação em paralelo de inversores
Inversores de tensão operando em paralelo possue o problema que variações nas tensões de
alimentação de cada unidade, variações paramétricas dos componentes do inversor e variações nos
sinais de controle podem desequilibrar a potência processada por cada unidade. Há casos em que um
inversor torna-se carga dos demais.
A Figura 7.1 mostra o resultado de simulação com dois inversores operando em paralelo
alimentado uma carga resistiva. Foi considerado que há uma variação de 7% na tensão CC de
alimentação entre as duas unidades. É visível nos resultados a diferença entre as correntes, inclusive
há uma defasagem entre elas. O inversor 1 está consumindo potência reativa, que é fornecida pelo
inversor 2 e há um desbalanço considerável na potência ativa processada por cada unidade.
A Figura 7.2 apresenta uma simulação do mesmo circuito considerando uma variação de 10% na
indutância de saída do filtro LC dos inversores. Observando os resultados nota-se uma pequena
variação entre as amplitudes e fases das correntes e na potência ativa processada fornecida por cada
inversor. Mas há um desbalanço considerável nas potências reativas, em que o inversor 2 está
consumindo potência reativa do inversor 1.
Estes dois simples casos mostram que é necessário haver um controle eficaz do funcionamento
de inversores operando em paralelo. Como visto, há casos de desequilíbrio que um inversor pode se
tornar carga dos outros, sobrecarregando esses e podendo danificar a UPS. Também é possível
concluir que os desequilíbrios são mais visíveis monitorando as variáveis de potências do que as
correntes.
Instituto de Eletrônica de Potência
77
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 7.1 - Simulação de dois inversores operando em paralelo com variações de 7% na tensão de alimentação CC.
Figura 7.2 – Simulação de dois inversores operando em paralelo com variações de 10% na indutância do filtro LC de saída.
Instituto de Eletrônica de Potência
78
Projetos de Inversores Monofásicos
_______________________________________________________________
7.2. Estudo Matemático do Paralelismo de Inversores
Para entender o principio de funcionamento de inversores operando em paralelo pode-se fazer
uma análise matemática simplificada.Equation Chapter (Next) Section 7
Inicialmente é apresentado na Figura 7.3 um gerador alimentado uma carga através de uma linha
de transmissão sem perdas. Analisando este circuito encontram-se facilmente as equações (7.1) e (7.2),
que mostram que a potências fornecidas pelo gerador dependem de V1, V0 e L, além disso, a potência
ativa depende do seno e a potência reativa do cosseno do ângulo entre as tensões. Esse resultado pode
ser extrapolado para inversores operando em paralelo, como demonstrado a seguir.
P10
V1 V0 sen(10 )
X L1
(7.1)
V02 V1 V0 cos(10 )
(7.2)
Q10
X L1
O circuito da Figura 7.4 mostra dois inversores ligados em paralelo alimentando uma carga.
Para o estudo da potência fornecida por cada inversor é possível simplificar os inversores da Figura
7.4 por duas fontes de tensão, como é apresentado na Figura 7.5. A pior situação para o paralelismo de
inversores é a sua operação a vazio (sem carga), como exemplificado na Figura 7.6. Fazendo a análise
do fluxo de potência do circuito da Figura 7.6 encontram-se as equações (7.3) e (7.4). Essas equações
demonstram que pode haver fluxo de potência entre os inversores, que a potência ativa depende da
diferença das amplitudes e do seno do ângulo entre as tensões V1 e V2 e que a potência reativa
depende da diferença das amplitudes e do cosseno do ângulo entre as tensões. Para um ângulo teta
muito pequeno (muito próximo de zero), o fluxo de potência ativa entre os inversores é
aproximadamente zero e o fluxo de potência reativa depende apenas das amplitudes das tensões V1 e
V2. A situação ideal é a que não haja fluxo de potência entre os inversores, consequentemente,
havendo equilíbrio de potências processadas por cada inversor. Para o caso da Figura 7.5, são
encontradas as equações de fluxo entre cada inversor e a carga e entre os inversores, representadas nas
equações (7.5), (7.6), (7.7) e (7.8) , alem das equações (7.3) e (7.4). As análises dos circuitos das
Figura 7.3, Figura 7.4, Figura 7.5 e Figura 7.6 são apresentadas Anexo A.
P12
V1 V2 sen(12 )
X L1 X L2
(7.3)
Q12
V12 V2 V1 cos(12 )
X L1 X L2
(7.4)
Instituto de Eletrônica de Potência
79
Projetos de Inversores Monofásicos
_______________________________________________________________
P10
V1 V0 sen(10 )
X L1
(7.5)
Q10
(7.6)
P20
V2 V0 sen(20 )
X L2
V02 V1 V0 cos(10 )
X L1
(7.7)
Q 20
V02 V2 V0 cos(20 )
X L2
(7.8)
No caso dos inversores em paralelo a tensão V0 (tensão da carga) é imposta pelo controle, sendo
as variáveis livres para a ação de controle V1 e V2. Ação na amplitude e fase dessas variáveis pode
provocar desequilíbrio de potência entre os inversores. Por isso, técnicas que utilizam o
monitoramento de potência ativa e reativa indicam ser as mais apropriadas para esta aplicação.
Inversor
1
Vi1
Figura 7.3 – Gerador alimentado uma
carga.
L1
L2
IL1
IL2
Z V0(t)
Inversor
2
Vi2
Figura 7.4 – Dois inversores em paralelo alimentando uma carga.
Figura 7.5 – Modelo simplificado de dois geradores
em paralelo alimentando uma carga.
Figura 7.6 – Modelo simplificado de dois geradores em paralelo
alimentando uma carga.
7.3. Principais Técnicas para o Paralelismo de Inversores Citadas na Literatura
Na literatura alguns métodos de controle da distribuição de potência são estudados. Estas
estratégicas de controle são divididas em duas categorias principais que são o controle sem
interconexão e controle com conexão das unidades. A seguir é apresentado um resumo de algumas
técnicas usuais.
Instituto de Eletrônica de Potência
80
Projetos de Inversores Monofásicos
_______________________________________________________________
7.4. Controle com Conexão
A possibilidade de existir comunicação entre as unidades pode facilitar a estratégia de controle,
facilitando o sincronismo e o controle da divisão de potência. Em desvantagem esse tipo de sistema
diminui a flexibilidade de colocar ou retirar inversores da UPS, e ainda diminui a redundância do
sistema. Existem diversas alternativas para o controle de inversores na literatura como, Central Limit
Control, Master-Slave Control, Circular Chain Control, Distributed Logic Control dentre outros. O
conceito básico dos principais métodos será abordado a seguir.
7.4.1. Central Limit Control
Este método baseia-se em um controle central que, a partir dos requisitos de carga, determina a
potência ou corrente a ser fornecida por cada unidade do sistema. O controle central recebe as
informações das correntes de cada unidade e corrente de total de carga (ou é calculada), definindo o
desvio de corrente de cada inversor [12].
A unidade central de controle dos sistemas que determinam a corrente de carga de cada unidade,
envia o desvio de corrente e o sinal de sincronismo para cada inversor. Com essas duas informações o
controle de cada unidade atua no controle da malha de tensão de saída do inversor. Nessa configuração
a tensão de saída todos os inversores estará em fase e o desvio de corrente é compensado atuando na
amplitude da tensão. O controle central de sistemas que determinam a potência de cada inversor envia
para os controles das unidades individuais o desvio de potência ativa, desvio de potência reativa e o
sinal de sincronismo. Essa estratégia permite que o controle de cada inversor atue sobre o ângulo e a
amplitude de sua tensão de saída. Em ambos os casos o controle central é responsável pelo
sincronismo dos inversores. Também existem outras configurações para a técnica Central Limit
Control.
Nessa estratégia de controle as unidades são idênticas e a unidade central pode colocar ou retirar
uma unidade do sistema conforme a necessidade [11].
As unidades recebem simultaneamente as ações de controle decorrentes das perturbações de
carga. Assim, tem-se uma dinâmica superior ao esquema Mestre-Escravo [14]. O aspecto negativo
deste método é a centralização do controle. Na Figura 7.7 é apresentada um exemplo do Central Limit
Control.
Instituto de Eletrônica de Potência
81
Projetos de Inversores Monofásicos
_______________________________________________________________
V0(t)
Barramento
de potência
L1
IL1
Vi1
Inversor
1
C1
ω1 / V 1
IL0
Z
L2
V0
IL2
Unidade Central
de Controle
V0
Vi2
ω1 / V 1
IL1
ω 2 / V2
IL2
Inversor
2
C2
ω2 / V 2
ω n / Vn
ILn
Ln
ILn
Vin
Inversor
n
Cn
ωn / V n
Figura 7.7 – Diagrama de blocos de um método do Central Limit control.
7.4.2. Master-Slave Control
Uma técnica muito utilizada é a arquitetura Master-Slave [13], em que o inversor Master é
responsável em controlar a tensão do barramento e indicar para cada inversor Slave a parcela de
corrente que ele deverá fornecer com objetivo de atender a corrente total de carga, sendo estes
conversores controlados por um compensador de corrente. Um circuito lógico define o Master em
função da resposta lógica mais rápida. Os demais se tornam Slave. Uma linha de status é
compartilhada indicando a existência do Master. Outra linha de comunicação é necessária para a
referência de freqüência. Essa linha garante o sincronismo de freqüência entre as unidades e é
controlada pela unidade Master. No caso de uma falha, um Slave assume a função de Master
instantaneamente, dando continuidade ao fornecimento de energia. Também é necessária outra linha
de comunicação para o fornecimento da referência de corrente que é gerada pelo Master e distribuída
aos Slaves. Esta técnica difere da anterior por não necessitar de uma unidade de controle central. Cada
inversor deve possuir seu sistema de controle que permite operar como Master e Slave. A
Instituto de Eletrônica de Potência
82
Projetos de Inversores Monofásicos
_______________________________________________________________
desvantagem é que a desconexão das linhas de comunicação pode comprometer o funcionamento do
sistema. A Figura 7.8 apresenta um método de controle Master-Slave.
Barramento
de potência
V0(t)
L1
Barramento
de dados
C1
Vi1
Master
Master
Vref M Iref
IL1
Inversor 1
Vref M Iref IL1
IL0
L2
Z
V0
IL2
Inversor 2
Vi2
C2
Slave
Vref M Iref IL2
Ln
ILn
Inversor n
Vin
Slave
Cn
Vref M Iref ILn
Figura 7.8 – Digrama de blocos do controle Master –Slave.
7.4.3. Circular Chain Control
Na técnica de Circular Chain Control, o inversor usa a corrente da unidade anterior como
referência de corrente, sendo que a primeira unidade tem como referência a corrente da última,
formando um anel. O controle de cada unidade inversora possui uma malha interna de corrente e uma
externa de tensão. O anel proposto nesta estrutura é implementado na malha interna de corrente,
resultando em um controle de distribuição com elevada dinâmica. A confiabilidade deste sistema fica
comprometida devido à possibilidade de rompimento do anel [14].
Instituto de Eletrônica de Potência
83
Projetos de Inversores Monofásicos
_______________________________________________________________
Barramento
de potência
V0(t)
L1
IL1
Vi1
Inversor 1
Iref1
C1
Iref2 IL1
IL0
Z
L2
V0
IL2
Vi2
Inversor 2
Iref2
C2
Iref3 IL2
Ln
ILn
Vin
Inversor n
Irefn
Iref1
Cn
ILn
Figura 7.9 – Diagrama de blocos do controle Circular Chain Control.
7.4.4. Distributed Logic Control
Nas técnicas anteriormente mencionadas a existência de um problema na unidade central de
controle ou nas linhas de comunicação causam o mal funcionamento e o desligamento da UPS, que
contradiz com a filosofia de redundância ao usar inversores em paralelo. Uma opção apresentada na
literatura é o método Distributed Logic Control, em que cada inversor do sistema recebe a informação
de freqüência e corrente de todos os outros inversores [12]. A informação da freqüência permite o
sincronismo na freqüência da tensão de saída de todos os inversores e a informação de corrente
garante a distribuição de corrente entre os inversores. Um defeito em um dos inversores, ou
rompimento dos cabos de informação não prejudica o funcionamento das outras unidades, que
continuam operando normalmente. A desvantagem é a quantidade de fios de comunicação entre os
inversores. Uma estrutura básica da filosofia da técnica Distributed Logic Control é mostrado na
Figura 7.10
Instituto de Eletrônica de Potência
84
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 7.10 – Diagrama de blocos do controle Distributed Logic Control.
7.5. Controle sem Conexão
Este tipo de controle se caracteriza por não necessitar de nenhuma comunicação entre os
inversores da UPS. Essa técnica também é conhecida na literatura por Wireless Independent Control e
Frequency and Voltage Droop. Em sistemas típicos de energia elétrica, em que grandes distâncias
entre os geradores tornam o fluxo de informação impraticável, técnicas de controle de potência ativa e
reativa garantem a operação e distribuição das cargas no sistema. No caso de inversores utiliza-se o
mesmo princípio, onde cada inversor possui a capacidade de calcular a sua potência ativa e reativa
processada. Com essas informações o sistema de controle atua no ângulo e na fase da tensão de saída
do inversor permitindo o controle da potência processada.
A operação estável de um sistema com vários geradores fornecendo potência a mesma carga
precisa de um controle da potência ativa e reativa. As potências ativa e reativa fluindo em um sistema
de tensão alternada podem ser estudada de maneiras desacoplada entre si para uma melhor
compreensão. Na Figura 7.5 é apresentado um esquema simplificado da conexão de dois geradores
Instituto de Eletrônica de Potência
85
Projetos de Inversores Monofásicos
_______________________________________________________________
conectados a um barramento por linhas de transmissão sem perdas. A potência ativa depende
predominantemente do ângulo da tensão e a potência reativa predominantemente da magnitude da
tensão, como pode ser observado pelas equações (7.5), (7.6), (7.7) e (7.8) {[16], [17]}. Na Figura 7.11
é apresentado um esquema simplificado do método de controle sem interconexão.
O controle dinâmico da freqüência controla o ângulo da potência e conseqüentemente o fluxo
potência ativa. O controle dinâmico da amplitude da tensão controla o fluxo de potência reativa. Para
assegurar a distribuição da potência fornecida a carga pelos inversores e a não circulação de potência
entre eles, é importante garantir que os inversores encontrem um ponto de operação sem comunicação
entre si. Isto é alcançado pela introdução de curvas de decaimento para a freqüência (droop frequency)
em função da potência ativa e para a amplitude da tensão (droop voltage) em função da potência
reativa {[14], [16], [17]}, igual os sistemas utilizados em sistemas elétricos. As curvas de decaimento
e as equações usadas para encontrar o equilíbrio entre os inversores são mostrados nas Figura 7.12 e
Figura 7.13 e nas equações (7.9) e (7.10). As equações mostram que as leituras de Q e P são usadas
para determinar o decaimento a tensão e da freqüência de cada inversor. O sistema encontra
naturalmente um ponto de operação. Os valores de ∆P e ∆Q determinam a diferença entre as potências
processadas por cada inversor. Essas variações são controladas pelo fator “k”, que quanto maior seu
valor menor será a variação de potência e maior será o esforço de controle. Nessa estratégia sempre
haverá um desequilíbrio ∆P e ∆Q entre as potências processadas por cada inversor.
É importante salientar que a troca de informação entre os inversores pode ser usada para
aumentar a performance do sistema, mas não deve ser essencial para a operação do mesmo.
0 k p P
(7.9)
V V0 k q Q
(7.10)
Instituto de Eletrônica de Potência
86
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 7.11 - Diagrama de blocos do controle sem conexão.
Figura 7.12 – Curva decaimento de freqüência.
Figura 7.13 – Curva decaimento de tensão.
7.6. Técnicas Proposta para o Paralelismo de Inversores
A análise do problema do paralelismo e o estudo das principais técnicas exploradas na literatura
deram suporte para buscar uma solução para o controle de inversores operando em paralelo. O
objetivo é obter uma técnica de controle que garanta equilíbrio de potência processada por cada
inversor e permita a conexão e retirada de uma unidade sem desligar a UPS. O caminho escolhido foi a
Instituto de Eletrônica de Potência
87
Projetos de Inversores Monofásicos
_______________________________________________________________
utilização das técnicas de controle que usam potência, buscando uma solução sem conexão entre os
inversores, ou com a menor quantidade de informações trocadas entre as unidades.
Analisando as equações (7.3), (7.5) e (7.7), que descrevem o fluxo de potência ativa entre os
inversores e entre inversor e carga, conclui-se que se um sistema de controle garantir que as tensões de
saída de todos os inversores estiverem em fase, consequentemente, praticamente não haverá circulação
de potência ativa entre os inversores, garantindo o equilíbrio de potência ativa processada. Haverá
apenas um pequeno desequilíbrio em relação à amplitude das tensões, mas que representa uma parcela
aceitável. Assim, pode-se focar o controle na medição da potência reativa e na ação sobre a amplitude
da tensão de saída de cada inversor, buscando o equilíbrio de potência reativa processada.
7.6.1. Primeira Proposta
A primeira proposta é apresentada na Figura 7.14, em que “n” inversores podem alimentar a
carga. Para garantir que as tensões de saída de todos os inversores estejam em fase, a tensão de
referência será a mesma para todos. Essa tensão está disponibilizada em um barramento de dados que
interliga todos os inversores e pode ser controlada por um sistema externo ou por um dos inversores.
Essa técnica se caracteriza por medir a potência reativa do inversor, compará-la com um valor médio,
aplicar o erro num controlador PI e a ação de controle de potência reativa é multiplicada pela ação de
controle da malha de tensão, com o objetivo de agir na amplitude da tensão de saída do inversor. Cada
inversor possui sua malha de tensão atuando constantemente e não há necessidade de uma impedância
para conectá-lo a carga. O valor de referência de potência reativa é calculado através da média das
potências de todos os inversores. Há duas maneiras de calcular a potência reativa média (Qmed), uma
através de uma central externa que receberia a informação das potências reativas de todos os
inversores, calcula a média e transmite o resultado. A segunda é que todos os inversores
disponibilizem o valor de sua potência reativa num barramento de dados e cada um faz a leitura da
potência reativa de todos os outros inversores e calcula o valor médio de potência reativa. A Figura
7.14 mostra a primeira opção.
Essa técnica necessita de um barramento maior de dados, uma unidade central para calcular a
potência média reativa, a tensão de referência e tem como maior vantagem a implementação de um
controlador PI na malha de potência reativa que garante erro nulo nessa ação controle, garantindo um
Instituto de Eletrônica de Potência
88
Projetos de Inversores Monofásicos
_______________________________________________________________
ótimo balanço de potência reativa processada pelos inversores. É importante salientar que a malha de
tensão continua sendo aplicada na maneira tradicional.
Barramento de potência
Barramento de dados
Vref Q1 Q2 Qmed
V0(t)
L1
IL1
Gerador
Vref
Vref
Q1
Q2
Cálculo
de Qmed
Qn
Qmed
Vi1
IL1
Compensador
de V
Vref
C1
Inversor 1
Modulador e
Gate Drive
CV
V0
TV
∆V
IL0
Compensador
de Q
Qmed
Z
CQ
Q1
IL1
Cálculo Q
V0
L2
IL2
Vi2
IL2
Compensador
de V
Vref
C2
Inversor 2
Modulador e
Gate Drive
CV
TV
V0
∆V
Compensador
de Q
Qmed
CQ
Q2
IL2
Cálculo Q
V0
Inversor n
Figura 7.14 – Primeira estratégia de controle proposta para o paralelismo de inversores.
V0
Instituto de Eletrônica de Potência
89
Projetos de Inversores Monofásicos
_______________________________________________________________
7.6.2. Segunda Proposta
Em busca de diminuir a quantidade de informações necessária no barramento de dados da
técnica número 1, adotou-se a estratégia das curvas de decaimento de tensão em função da carga para
controlar a potência reativa dos inversores, estudadas nas referencias [12], [15] e [16]. Essa técnica
também é conhecida como droop voltage. A Figura 7.15 apresenta o diagrama de blocos da segunda
técnica. Verifica-se que foi utilizada a mesma estratégia para o controle da potência ativa da primeira
técnica, usando uma linha do barramneto de dados para transmitir a referência de tensão para todos os
inversores. A potência reativa é calculada pelo inversor e o resultado aplicado na equação (7.10). O
fator “kq” controla o decaimento da tensão de saída em função da carga do inversor. Segundo a
equação (7.10) quanto maior a carga, menor será valor da amplitude da tensão. Seguindo essa ação de
controle todos os inversores encontrarão um ponto de funcionamento, em que o valor do fator “kq”
garante o equilíbrio de potência reativa fornecida por cada unidade. A ação de controle de potência
reativa atua na amplitude da referência de tensão (Vref) {[12], [15] e [16]}, conforme visto na Figura
7.15. Nessa estratégia cada inversor pode ter um valor diferente de referência de tensão aplicado na
malha de tensão, para evitar instabilidade do sistema é necessário conectar os inversores ao
barramento de potência através de uma reatância (L1, L2, Ln). Nota-se que a tensão controlada é a
tensão de saída do inversor (V01, V02, etc) e não a tensão do barramento de potência V0.
Essa segunda estratégia possui apenas uma linha de barramento de dados. Em desvantagem tem
a necessidade da conexão do inversor ao barramento de potência através de uma reatância em baixa
freqüência e o controle de potência reativa é feito através de um ganho, aceitando um determinado erro
no sistema, que neste caso se reflete num determinado desbalanço de potência. Conforme pode ser
visto na Figura 7.13, essa estratégia sempre haverá uma diferença de ∆Q entre os inversores.
Instituto de Eletrônica de Potência
90
Projetos de Inversores Monofásicos
_______________________________________________________________
Barramento de potência
Barramento de dados
Vref
L1
Z1
V0(t)
IL1
Vref
Vi1
Gerador
Vref
Vref1
Vref
∆V
C1
Inversor 1
IL1
Compensador
de V
Vref
V01
Modulador e
Gate Drive
CV
IL0
Z
V01
TV
V0
kQ
Q1
IL1
Cálculo Q
Compensador
de Q
V01
L2
V02
Z2
IL2
Vi2
IL2
Compensador
de V
Vref2
Vref
Vref
∆V
C2
Inversor 2
Modulador e
Gate Drive
CV
TV
V02
kQ
Q2
IL2
Cálculo Q
V02
Inversor n
Figura 7.15 – Segunda estratégia de controle proposta para o paralelismo de inversores.
7.6.3. Terceira Proposta
Ao estudar a técnica numero dois, percebeu-se que poderiam ser feito algumas modificações
para melhorá-la. A Figura 7.16, mostra a terceira técnica, em que a principal diferença está no controle
de potência reativa. Nessa estratégia o controle também usa a metodologia do decaimento da tensão de
saída em função da potência reativa de saída, só que a ação de controle é feita sobre o sinal de controle
da malha de tensão, conforme mostrado na Figura 7.16. Isto garante que a referência de tensão será a
mesma as malhas de tensão de todos os inversores, permitindo conectar todos diretamente ao
barramento de potência.
Instituto de Eletrônica de Potência
91
Projetos de Inversores Monofásicos
_______________________________________________________________
Barramento de potência
Barramento de dados
Vref
V0(t)
L1
IL1
Vi1
Vref
C1
Inversor 1
Gerador Vref
(rede elétrica
ou PLL)
IL1
Compensador
de V
Vref
Modulador e
Gate Drive
CV
V0
TV
∆V
IL0
Compensador
de Q
Z
V0
kQ
Q1
IL1
Cálculo Q
V0
L2
IL2
Vi2
IL2
Compensador
de V
Vref
C2
Inversor 2
Modulador e
Gate Drive
CV
TV
V0
∆V
Compensador
de Q
kQ
Q2
IL2
Cálculo Q
V0
Inversor n
Figura 7.16 – Terceira estratégia de controle proposta para o paralelismo de inversores.
As três técnicas apresentadas foram estudadas amplamente e apresentaram bons resultados. Nos
próximos capítulos serão mostrados resultados de simulação e a metodologia usada para calcular a
potência reativa.
Instituto de Eletrônica de Potência
92
Projetos de Inversores Monofásicos
_______________________________________________________________
7.7. Simulação das Técnicas Propostas
Para testar as três técnicas de controle propostas no capítulo 0 foram feitas simulações em um
sistema com três inversores de 10kVA, alimentando uma carga não linear de 30kVA e fator de crista
três. Foram consideradas pequenas variações nas tensões de alimentação e no valor da indutância do
filtro LC de saída de cada inversor. O circuito de potência simulado é apresentado na Figura 7.17. As
informações mais relevantes do projeto do inversor são apresentadas na Tabela 7.1.
Figura 7.17 – Circuito de potência de uma UPS de 30kVA.
Instituto de Eletrônica de Potência
93
Projetos de Inversores Monofásicos
_______________________________________________________________
Tabela 7.1 – Dados do inversor de 10 kVA.
Vi
400 Vcc
Vout
311 Vp
Lf
500 µH
Cf
60 µF
S
10 kVA
A Figura 7.18 apresenta os comportamentos da tensão V0 (tensão no barramento de potência), da
corrente de carga IL0 e das correntes de saída dos três inversores (IL1, IL2 e IL3) para a situação sem
controle de potência reativa. Os inversores estão operando em malha fechada com as suas malhas de
tensão. A referência de tensão é a mesma para os três inversores, ou seja, estão sincronizadas.
Na figura é possível observar que quando a carga está exigindo corrente dos inversores há uma
diferença expressiva entre IL1, IL2 e IL3 e, quando não está exigido corrente dos inversores há
circulação de corrente entre eles. Ao verificar a Figura 7.19, que mostra a potência ativa e reativa dos
três conversores, é possível perceber que o inversor 3 está consumindo potência reativa (Q3) dos
outros 2 inversores (Q1 e Q2). Além disso, verificando W1, W2 e W3, nota-se que há um desbalanço
na potência ativa fornecida por cada unidade.
Figura 7.18 – Tensão V0, corrente I0, correntes IL1, IL2 e IL3 sem controle de potência reativa.
Instituto de Eletrônica de Potência
94
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 7.19 – Potências ativas (W1, W2 e W3) e reativas (Q1, Q2 e Q3) sem controle de potência reativa.
7.7.1. Estudo da Primeira Técnica
Aplicando a primeira estratégia para o controle de potências no circuito da Figura 7.17, obtêm-se
os resultados apresentados nas Figura 7.20 e Figura 7.21. A tensão V0 e a corrente de carga I0
continuam com os mesmos valores. As correntes IL1, IL2 e IL3 fornecidas por cada inversor se
equilibram, além de diminuir a circulação de corrente entre os inversores nos instantes que não há
fornecimento de corrente a carga. A Figura 7.21 mostra o equilíbrio das potências ativas e reativas
fornecidas pelos inversores a carga não linear. Esses resultados confirmaram a eficácia da técnica.
Instituto de Eletrônica de Potência
95
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 7.20 – Tensão V0, corrente I0, correntes IL1, IL2 e IL3 com a primeira estratégia de controle da potência reativa.
Figura 7.21 – Potências ativas (W1, W2 e W3) e reativas (Q1, Q2 e Q3) com a primeira estratégia de controle de potência
reativa.
Instituto de Eletrônica de Potência
96
Projetos de Inversores Monofásicos
_______________________________________________________________
7.7.2. Estudo da Segunda Técnica
As Figura 7.22 e Figura 7.23 apresentam os resultados de simulação do circuito da Figura 7.17
usando a segunda técnica de controle proposta. É possível observar na Figura 7.23 que houve uma
ação de controle buscando equilibrar as potências reativas Q1, Q2 e Q3. Consequentemente as
correntes IL1, IL2 e IL3 estão mais equilibradas, como pode ser observado na Figura 7.22. Esta proposta
usa a técnica decamimento de tensão em função da potência reativa, em que apenas um ganho é usado
para controlar a potência reativa. Este tipo de controle aceita um determinado erro. Observa-se que
ainda há um desequilíbrio nas potências ativas e a tensão de saída está mais “achatada” em ralação as
primeiras simulações. Os resultados indicam que está técnica possui uma ação de controle que busca o
equilíbrio das potências processadas pelos inversores.
Figura 7.22 – Tensão V0, corrente I0, correntes IL1, IL2 e IL3 com a segunda estratégia de controle da potência reativa.
Instituto de Eletrônica de Potência
97
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 7.23 – Potências ativas (W1, W2 e W3) e reativas (Q1, Q2 e Q3) com a segunda estratégia de controle de potência
reativa.
7.7.3. Estudo da Terceira Técnica
Aplicando a terceira estratégia de controle proposta no circuito da Figura 7.17, obtêm-se os
resultados apresentados nas Figura 7.24 e Figura 7.25. Analisando as correntes IL1, IL2 e IL3 fornecidas
por cada inversor é possível concluir visualmente que elas estão equilibradas. As potências reativas
Q1, Q2 e Q3 também estão equilibradas. Essa estratégia usa a técnica do decaimento de tensão em
função da carga, usando apenas um ganho k para encontrar o ponto de equilíbrio entre os geradores, o
que aceita um erro em regime permanente, que se reflete numa diferença de valor das potências
reativas processadas por cada conversor. Também houve um equilíbrio nas potências ativas W1, W2 e
W3, como visualizado na Figura 7.25.
Essa técnica apresentou bons resultados, garantindo o equilíbrio de potências processada, o
equilíbrio de corrente e não precisa do acréscimo de uma reatância para conectar os inversores ao
barramento de potência.
Instituto de Eletrônica de Potência
98
Projetos de Inversores Monofásicos
_______________________________________________________________
. .
Figura 7.24 – Tensão V0, corrente I0, correntes IL1, IL2 e IL3 com a terceira estratégia de controle da potência reativa.
Figura 7.25 – Potências ativas (W1, W2 e W3) e reativas (Q1, Q2 e Q3) com a segunda estratégia de controle de potência
reativa.
Instituto de Eletrônica de Potência
99
Projetos de Inversores Monofásicos
_______________________________________________________________
Todas as simulações apresentaram um “achatamento” na tensão de saída dos inversores. Isso
pode ser melhorado com um projeto otimizado do circuito de potência e do circuito de controle, mas
este não era o foco principal deste estudo.
7.8. Implementação do Cálculo das Potências Reativa e da Potência Ativa dos Inversores
As principais técnicas de controle do paralelismo de inversores atualmente estudadas usam
estratégias de controle de potência ativa e reativa. Um dos grandes desafios deste tipo de técnicas é a
implementação do cálculo da potência ativa e reativa de cada inversor. A seguir é apresentado uma
metodologia própria para este objetivo, em que é possível implementá-la com circuitos analógico ou
digital
O modelo simplificado do inversor é apresentado na Figura 7.26. As equações (7.11) e (7.12)
definem a tensão e a corrente fornecida pelo inversor a carga. V1p é a tensão de pico, I1p é a corrente de
pico, I1d é a corrente de eixo direto e I1q é a corrente de eixo em quadratura. Adotou-se a tensão do
inversor v1(t) com referência. A Figura 7.27 mostra o diagrama fasorial da tensão v1(t) e i1(t).
I1d
V1p
α
I1q
I1p
Figura 7.26 – Modelo simplificado do inversor.
Figura 7.27 – Diagrama fasorial de v1(t) e i1(t).
v1 (t) V1p sen( t)
(7.11)
i1 (t) I1p sen( t )
(7.12)
A potência fornecida pelo inversor a carga é definida na equação (5.5):
p(t) v1(t) i1(t) V1p sen( t) I1p sen( t )
Manipulando a equação (5.5) encontra-se a equação (5.5):
(7.13)
1
1
1
p(t) V1p I1p cos( ) V1p I1p cos( ) cos(2 t) V1p I1p sen( ) sen(2 t) (7.14)
2
2
2
Instituto de Eletrônica de Potência
100
Projetos de Inversores Monofásicos
_______________________________________________________________
A equação (7.14) apresenta as parcelas da potência ativa média, potência ativa oscilante e
potência reativa oscilante [18], que são escritas nas equações (7.15), (7.16) e (7.17) respectivamente.
Pm
1
V1p I1p cos( )
2
(7.15)
1
(7.16)
Posc V1p I1p cos( ) cos(2 t)
2
1
(7.17)
Qosc V1p I1p sen( ) sen(2 t)
2
O objetivo é obter o valor de potência ativa e reativa processada pelo inversor, por isso
necessita-se encontrar uma maneira de calcular Pm e o módulo de Qosc.
A implementação do cálculo da potência ativa média pode ser feito multiplicando v1(t) e i1(t) e
aplicando o resultado num filtro passa-baixa para cortar a parcela oscilante da equação (7.14). De
maneira simplificada, a implementação é mostrada no diagrama de blocos da Figura 7.28.
Figura 7.28 – Diagrama de blocos da implementação do cálculo de Pm.
A corrente de eixo direto é definida:
I1d I1p cos( )
Então, a potência média pode ser representada pela equação (7.19).
(7.18)
1
V1p I1d
(7.19)
2
Multiplicando a equação (7.19) por sen(ωt) e manipulando a equação (7.20), tem-se o valor
Pm
instantâneo da corrente de eixo direto, representada na equação (7.21) e exemplificado na Figura 7.29.
1
V1p I1d sen( t)
2
2 Pm
i1d (t)
sen( t)
V1p
sen( t) Pm
(7.20)
(7.21)
Instituto de Eletrônica de Potência
101
Projetos de Inversores Monofásicos
_______________________________________________________________
i1(t)
Pm
v1(t)
2
V1p2
I1d(t)
2sen(ωt)
V1p
Figura 7.29 – Diagrama de blocos da implementação do cálculo de i1d(t).
Com o valor instantâneo da corrente de eixo direto é possível calcular a corrente instantâneo de
eixo em quadratura, definida na equação (7.22). A Figura 7.30 mostra o diagrama de blocos para a
implementação do cálculo de i1q(t) a partir de i1d(t).
i1q (t) i1 (t) i1d (t)
(7.22)
Figura 7.30 – Diagrama de blocos da implementação do cálculo de i1q(t).
A potência reativa instantânea é definida pela equação (7.23), em que Q(t) é igual a Qosc
mostrada na equação (7.17). Analisando o diagrama fasorial da Figura 7.27 pode-se escrever a
corrente instantânea de eixo em quadratura em função do referencia adotado, como apresentado na
equação (7.24).
Q(t) v1 (t) i1q (t)
(7.23)
i1q (t) I1q sen t
2
A equação (7.24) pode ser rescrita da seguinte forma:
i1q (t) I1q cos t
(7.24)
(7.25)
A potência reativa tem somente parcela oscilatória na freqüência de 2 vezes a freqüência da
tensão. O objetivo é encontrar uma maneira de calcular o módulo da potência reativa. Por isso, adotouse a seguinte metodologia:
Inicialmente, aplicou-se um deslocamento de
2
radianos na corrente instantânea de eixo em
quadratura, que consiste em derivar a equação (7.25):
d
d
i1q (t) I1q cos t I1q sen t
dt
dt
Dividindo por ω e multiplicando por v1(t) a equação (7.26) tem-se:
(7.26)
Instituto de Eletrônica de Potência
102
Projetos de Inversores Monofásicos
_______________________________________________________________
v1 (t) d
i (t)
(7.27)
dt 1q
Substituindo as equações (7.11) e (7.26) na equação (7.27), tem-se a equação (7.28):
Q '(t)
Q '(t) V1p sen( t) I1q sen t
(7.28)
Manipulando a equação (7.28), obtém-se a equação (7.29):
Q '(t)
V1p I1q
2
V1p I1q
2
cos(2 t)
(7.29)
Para analisar o resultado é interessante reescrever na equação (7.30) a equação (7.17) da
potência reativa oscilante. Substituindo o valor da corrente de eixo em quadratuda (equação (7.31)) na
equação (7.30) tem-se a equação (7.32).
1
Q osc V1p I1p sen( ) sen(2 t)
2
(7.30)
I1q I1p sen( )
(7.31)
Como
1
(7.32)
Qosc V1p I1q sen(2 t)
2
Comparando a equação (7.32) da potência reativa com a equação (7.29), pode-se concluir que o
valor médio da equação (7.29) representa o valor de pico da potência reativa processada pelo inversor.
Isto permite usar essa equação para calcular a potência reativa. A Figura 7.31 apresenta um diagrama
de blocos para a implamentação do cálculo da potência reativa, usando a metodologia apresentada no
desenvolvimento da equação (7.29).
Figura 7.31 – Diagrama de blocos da implamentação do cálculo da potência reativa.
A Figura 7.32 mostra um diagrama de blocos completo da metodologia proposta nesse capítulo
para o cálculo da potência ativa e reativa.
Instituto de Eletrônica de Potência
103
Projetos de Inversores Monofásicos
_______________________________________________________________
Figura 7.32 – Diagrama de blocos completo da implementação do cálculo de potência ativa e reativa.
8. Conclusão
Este trabalho apresentou uma revisão dos conceitos fundamentais s inversores de tensão
monofásicos utilizando modulação SPWM de três níveis. Está modulação é uma das mais empregadas
por aplicar uma tensão na entrada do filtro LC no dobro da freqüência de comutação dos interruptores.
Essa característica diminui o tamanho e os esforços do filtro. Também foi apresentado um estudo
aprofundado de uma metodologia para o cálculo do filtro LC do inversor de freqüência, em que os
valores de indutância e capacitância são definidos em função da definição de máxima ondulação de
corrente no indutor e máxima ondulação de tensão na saída. Um projeto ótimo do filtro LC considera
suas características elétricas, como máxima ondulação de corrente, máxima ondulação de tensão,
resposta dinâmica e potência reativa circulando pelo filtro. Além disso, tamanho e preço dos
componentes são de fundamentais importâncias. É difícil representar todas essas variáveis numa única
equação matemática. A proposta aqui apresentada é de definir os valores de indutância e capacitância
analisando a máxima ondulação de corrente no indutor, máxima ondulação de tensão no capacitor,
freqüência de ressonância, atenuação na freqüência da tensão VAB, potência reativa consumida pelo
filtro e custo final. Esse é um processo iterativo, em que o projetista busca o ponto ótimo para seus
propósitos analisando gráficos e buscando a melhor solução para seu caso.
No que se refere ao controle do inversor, o modelo matemático obtido da planta mostrou-se
adequado para a definição da estrutura do compensador da malha de tensão e seu ajuste. Este modelo
revela um sistema de segunda ordem onde as raízes estão no eixo imaginário, visto que todas as
resistências parasitas são desprezadas. Desta forma a adoção de um controlador que não desloque a
alocação dos pólos em malha fechada para o semi-plano esquerdo do lugar das raízes não é
Instituto de Eletrônica de Potência
104
Projetos de Inversores Monofásicos
_______________________________________________________________
apropriado. Por esta razão optou-se pela escolha de um controlador PID, o que garante erro nulo e
estabilidade do sistema. Para a definição dos parâmetros de ajuste do controlador foi seguida a
metodologia proposta na bibliografia que está baseada na análise dos diagramas de Bode. Os
resultados obtidos da análise matemática foram validados através de simulação numérica, e no caso de
carga linear, mostraram-se adequados.
Foi apresentado uma metodologia no capítulo 4 para a análise da derivada do sinal de controle,
com o objetivo de evitar múltiplos pulsos nos interruptores durante um período de comutação. Essa
ferramenta permite que projetista possa prever possíveis problemas na implementação do seu projeto e
que já faça as correções necessárias. A metodologia apresenta as variáveis que podem ser alteradas
para evitar o problema de múltiplos pulsos.
A metodologia de projeto do compensador apresentado no capítulo 3 usa ferramentas
considerando cargas lineares. No capítulo 5 é feito um estudo e apresentado uma metodologia de
projetista que permite verificar se o inversor tem capacidade de atender determinada carga não linear,
sem aumentar a distorção harmônica da tensão de saída. Nessa análise é necessário conhecer as
características da carga não linear. Salienta-se que este é o tipo de carga que a maioria dos inversores
irá alimentar. Por isso, é necessário fazer essa verificação e adequar o projeto para atender as
características da carga não-linear. Foi verificado nos estudos que um projeto adequado, verificando a
capacidade de derivada de corrente da planta (inversor) e limitando o fator de crista da carga não linear
é possível projetar um inversor que atenda essa carga com uma tensão de saída com baixa distorção
harmônica.
No capítulo 6 foi realizado o equacionamento para a determinação das perdas nos
semicondutores do inversor operando com carga puramente resistiva. Inicialmente foram determinadas
as perdas por condução e comutação do IGBT e na seqüência a determinação das perdas no diodo
também foi apresentada. Dando continuidade, foi calculada a resistência térmica necessária ao
dissipador para que a temperatura de junção dos semicondutores fosse mantida dentro de limites
previamente estabelecidos..
O estudo do paralelismo de inversores mostrou que é necessário ter uma estratégia de controle
adequada para garantir o equilíbrio de potência processada pelas unidades. Na literatura são
apresentadas diferentes técnicas de controle aplicadas ao paralelismo de inversores com suas
vantagens e desvantagens. Na aplicação em UPS, busca-se que o sistema tenha um alto grau de
Instituto de Eletrônica de Potência
105
Projetos de Inversores Monofásicos
_______________________________________________________________
redundância, por isso técnicas com controles independentes são mais atraentes. No estudo apresentado
se propôs três maneiras diferentes de controlar a distribuição de potência entre os inversores,
monitorando as potências ativas e reativas. Os resultados de simulação mostraram a eficiência das
técnicas apresentadas, em que todas as três estratégias testadas conseguiram manter o equilíbrio de
potência processada entre todos os inversores.
O objetivo final do trabalho foi apresentar de maneira didática e organizada um procedimento de
projeto de inversores de tensão. Em paralelo a este documento foi desenvolvida uma planilha de
cálculo usando essa metodologia, com intuito de ser uma ferramenta para o projeto de inversores
monofásicos.
9. Anexos
9.1. Anexo A
Equation Chapter (Next) Section 9
9.1.1. Cálculo do fluxo de potência entre um inversor e uma carga
Cálculo do fluxo de potência entre um inversor e uma carga pode ser considerado um problema
de fluxo de potência entre gerador um carga, devido à simplificação feita no modelo do inversor. A
Figura 9.1 apresenta o modelo matemático simplificado do inversor alimentando uma carga e a seguir
são descritos os procedimentos matemáticos para determinar o fluxo de potência.
Figura 9.1 – Modelo simplificado de um inversor alimentando uma carga.
A potência entregue a carga é:
(9.1)
S0 V0 i*0
Onde a referência o sistema é a tensão V0 , ou seja, a tensão V0 tem ângulo zero.
Assim:
Instituto de Eletrônica de Potência
106
Projetos de Inversores Monofásicos
_______________________________________________________________
Sendo: θ10
módulo de V1 .
(9.2)
V0 V0 cos(0) jV0 sen(0) V0
V1 V1 cos(10 ) jV1 sen(10 )
(9.3)
o ângulo entre as tensões V0 e V1 , V0 o valor de módulo de V0 e V1 o valor de
A corrente i 0 é definida:
V V
0
(9.4)
i0 1
jX L
Substituindo (9.2) e (9.3) em (9.4) tem-se:
V cos( ) jV sen( ) V V sen( ) V cos( ) V
10
1
10
0
10
10
0
(9.5)
i0 1
1
j 1
jX L
XL
XL
Substituindo as equações (9.2) e (9.5) em (9.1) e fazendo algumas manipulações:
V V sen( )
V V cos(10 ) V02
10
(9.6)
S0 0 1
j 0 1
XL
XL
Onde a primeira e a segunda parcela da equação (9.6) representam o fluxo de potência ativa e
reativa entre inversor e carga, respectivamente. Pode-se definir que o fluxo de potência ativa é:
V0 V1 sen(10 )
XL
E definir que o fluxo de potência reativa é:
V V cos(10 ) V02
Q10 0 1
XL
P10
(9.7)
(9.8)
9.1.2. Cálculo do fluxo de potência entre dois inversores
Cálculo do fluxo de potência entre dois inversores também pode ser considerado um problema
de fluxo de potência entre dois geradores. A Figura 9.2 apresenta o modelo matemático simplificado
de dois inversores conectados e a seguir são descritos os procedimentos matemáticos para determinar
o fluxo de potência entre eles.
Figura 9.2 – Modelo simplificado de dois geradores conectados por suas impedâncias.
Instituto de Eletrônica de Potência
107
Projetos de Inversores Monofásicos
_______________________________________________________________
O grande problema quando há fluxo de potência entre os inversores é na situação a vazio, em
eles não fornecem potência à carga. Nessa situação, se um inversor recebe fluxo de potência de outro,
a somatório dos fluxos é praticamente a potência recebida. A parcela de potência reativa recebida
circula pelo inversor e a parcela de potência ativa recebida é entregue ao link CC do inversor, podendo
gerar problemas de sobretensão no barramento CC. Em situações com carga, mesmo que o inversor
receba fluxo de potência ativa de outra unidade, a somatória dos fluxos recebido e produzido
geralmente é positiva e há apenas desequilíbrio entre as potências processadas por cada inversor.
A potência aparente entregue pelo inversor 1 (V1(t)) ao inversor 2 (V2(t)) da Figura 9.2 pode ser
definida como:
S2 V2 i*2
(9.9)
Onde a referência o sistema é a tensão V2 , ou seja, pode-se considerar a tensão V2 como de
ângulo zero.
Assim:
Sendo: θ12
módulo de V1 .
(9.10)
V2 V2 cos(0) jV2 sen(0) V2
(9.11)
V1 V1 cos(12 ) jV1 sen(12 )
o ângulo entre as tensões V2 e V1 , V2 o valor de módulo de V2 e V1 o valor de
A corrente i L2 é definida:
V V
2
i L2 i L1 1
jX L12
(9.12)
Onde:
X L12 X L1 X L2
Substituindo (9.10) e (9.11) em (9.12) tem-se:
(9.13)
V cos( ) jV sen( ) V V sen( ) V cos( ) V
12
1
12
2
12
12
2
(9.14)
1
j 1
i L2 1
jX L12
X L12
X L12
Substituindo as equações (9.10) e (9.14) em (9.9) e fazendo algumas manipulações:
V V sen( )
V V cos(12 ) V22
12
S12 2 1
j 2 1
X L12
X L12
(9.15)
Instituto de Eletrônica de Potência
108
Projetos de Inversores Monofásicos
_______________________________________________________________
Onde a primeira e a segunda parcela da equação (9.15) representam o fluxo de potência ativa e
reativa entre inversor 1 e o inversor 2, respectivamente. Pode-se definir que o fluxo de potência ativa
é:
V2 V1 sen(12 )
X L12
E definir que o fluxo de potência reativa é:
V2 V1 cos(12 ) V22
Q12
X L12
P12
(9.16)
(9.17)
9.1.3. Cálculo do fluxo de potência de dois inversores alimentando uma carga
Cálculo do fluxo de potência de dois inversores alimentando uma carga também pode ser
considerado um problema de fluxo de potência entre dois geradores. A Figura 9.2 apresenta o modelo
matemático simplificado de dois inversores conectados e a seguir são descritos os procedimentos
matemáticos para determinar o fluxo de potência entre eles.
Figura 9.3 – Modelo simplificado de dois geradores alimentando uma carga.
A potência aparente entregue pelos inversores 1 (V1(t)) e 2 (V2(t)) a carga Z, como
demonstrando na Figura 9.2, pode ser definida como:
(9.18)
S0 V0 i*0
Onde a referência o sistema é a tensão V0 , ou seja, a tensão V0 tem ângulo zero.
Assim:
(9.19)
V0 V0 cos(0) jV0 sen(0) V0
(9.20)
V1 V1 cos(10 ) jV1 sen(10 )
(9.21)
V2 V2 cos( 20 ) jV2 sen( 20 )
Sendo: θ10 o ângulo entre as tensões V0 e V1 , θ20 o ângulo entre as tensões V0 e V2 , V0, V1, V2
são os módulos das tensões V0 , V1 e V2 .
Instituto de Eletrônica de Potência
109
Projetos de Inversores Monofásicos
_______________________________________________________________
A corrente i 0 é definida:
i 0 i L1 i L2
(9.22)
V V
0
i L1 1
jX L1
(9.23)
e
e
V V
0
(9.24)
i L2 2
jX L2
Substituindo (9.24) e (9.23) em (9.22), tem-se:
V V V V
0
0
(9.25)
i0 1
2
jX L1
jX L2
Substituindo (9.20) e (9.21) em (9.25), obtém-se:
V sen( ) V sen( ) V cos( ) V
V cos( 20 ) V0
10
20
10
0
(9.26)
i0 1
2
j 1
j 2
X L1
X L2
X L2
X L2
Substituindo as equações (9.26) e (9.19) em (9.18) e fazendo algumas manipulações:
V V sen( ) V V sen( )
V0 V1 cos(10 ) V02 V0 V2 cos( 20 ) V02
0
1
10
0
2
20
(9.27)
j
S0
j
X L1
X L2
X L2
X L2
Onde a parcela real da equação (9.27) representa o fluxo de potência ativa recebida pela carga
dos inversores 1 e 2, e a parcela imaginaria da equação (9.27) representa o fluxo de potência reativa
recebida pela carga dos inversores inversor 1 e 2. Analisando esta equação pode-se definir que o fluxo
de potência ativa de cada inversor para a carga é:
V0 V1 sen(10 )
X L1
V V sen( 20 )
P20 0 2
X L2
e definir que o fluxo de potência reativa é:
V V cos(10 ) V02
Q10 0 1
X L1
P10
Q 20
V0 V2 cos( 20 ) V02
X L2
(9.28)
(9.29)
(9.30)
(9.31)
Instituto de Eletrônica de Potência
110
Projetos de Inversores Monofásicos
_______________________________________________________________
10. Referência Bibliográfica
[1] DEWAN, S. B.; ZIOGAS, P. D.; 1979. Optimum Filter Design for a Single Phase Solid-State
UPS System. Em IEEE Trans. Ind. Appl., vol. IA-15, no. 6, pág. 664-669.
[2] BARBI, Ivo; MARTINS, Denizar Cruz; 2005. Eletrônica de Potência - Introdução ao estudo de
conversores CC-CA. Florianópolis; Edição dos Autores.
[3] GERENT, F. H.. Metodologia de Projeto de Inversores Monofásicos de Tensão Para Cargas
Não-Lineares. Dissertação (Mestrado em Engenharia Elétrica) – INEP, UFSC, Florianópolis,
Santa Catarina. 2005.
[4] ERICKSON, Robert W.; 1997. Fundamentals of Power Electronics. New York; Chapman &
Hall.
[5] KISLOVSKI, André S.; REDL, Richard; SOKAL, Nathan O.; 1991. Dynamic Analysis of
Switching-Mode DC/DC Converters. New York; Van Nostrand Reinhold.
[6] LAI, Zheren; SMEDLEY, Keyue Ma; 1998. A General Constant-Frequency Pulsewidth
Modulator and Its Applications. Em IEE Transactions on Circuits and Systems – I: Fundamental
Theory and Applications, vol. 45, No 4, pág. 386 – 396.
[7] BARBI, Ivo; 2001. Eletrônica de Potência – Projetos de Fontes Chaveadas. Florianópolis;
Edição do Autor.
[8] CASANELLAS, F. Losses in PWM inverters using IGBTs. Electric Power Applications IEEE
Proceedings. Volume 141, Issue 5, Sept. 1994 Page(s):235 – 239.
[9] BASCOPÉ, R. P. T.; PERIN, A. J. O Transistor IGBT Aplicado em Eletrônica de Potência. Sagra
Luzzato Editores. Porto Alegre. 1997.
[10] Application Note NA-983. IGBT Characteristics – International Rectifier. www.irf.com,
acessado em 15/052007.
[11] Barauna, Allan Pierre. Paralelismo de Inversores de Tensão Controlados pelo Valor Médio
Instantâneo da Tensão de Saída. Dissertação (Mestrado em Engenharia Elétrica) – INEP, UFSC,
Florianópolis, Santa Catarina. 2003.
Instituto de Eletrônica de Potência
111
Projetos de Inversores Monofásicos
_______________________________________________________________
[12] Chen, Jiann-Fuh; Yong, Kang. Parallel Operation Control Technique of Voltage Source Inverters
in UPS. PEDS, IEEE, p: 883 -887, Jul. 1999.
[13] Broeck, Heinz van der; Boeke, Ulrich. A Simple Method for Parallel Operation of Inverters.
INTELEC, p: 143 -150, Oct. 1998.
[14] Coelho, Ernane A. A. Técnicas de Controle Aplicadas ao Paralelismo de Inversores. Tese de
Doutorado. Belo Horizonte, MG, 2000.
[15] Jeong, Byung-Hwan; Park, Jong-Chan; Choe, Gyu-Há. Parallel Operation Control of N+1
Redundant Inverter System. Power Electronics Specialists Conference, 2006. PESC '06. 37th
IEEE. Page(s):1 – 6. June 2006.
[16] Tuladhar, A.; Jin, H.; Unger. T.; Mauch, K. ; Parallel Operation of Single Phase Inverter
Modules With No Control Interconnections. IEEE, p: 94 -1000, Feb. 1997.
[17] Guerreiro, Josep M. ;Vicuna, luis G.; Matas, José; Castilla, Miguel; Miret, Jaume.; Output
Impedance Design of Parallel-Connected Ups Inverters With Wireless Load-Sharing Control.
IEEE, p: 1126-1135, Aug. 2005.
[18] Nilsson, James W.; Riedel, Susan A.; Circuitos Elétricos. 5a edição. Editora LTC, 1999.
UNIVERSIDADE FEDERAL DE SANTA CATARINA
CENTRO TECNOLÓGICO
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
ESTUDO DO INVERSOR MONOFÁSICO
DISCIPLINA:
EEL.6570 TÓPICO ORIENTADO – INVERSORES
TRIFÁSICOS
PROFESSOR: IVO BARBI, DR. ING.
ALUNO: GLEYSON LUIZ PIAZZA
13/10/2008
Sumário
ÍNDICE DE FIGURAS
iii
ÍNDICE DE TABELAS
iv
SIMBOLOGIA E ABREVIATURAS
v
CAPÍTULO 1 .................................................................................................................. 1
Introdução Geral ............................................................................................................ 1
CAPÍTULO 2 .................................................................................................................. 2
Estudo do Inversor de Tensão Monofásico .................................................................. 2
2.1 Introdução ............................................................................................................... 2
2.2 Modulação Três Níveis SPWM (unipolar) ............................................................. 3
2.3 Etapas de Operação do Inversor de Tensão ............................................................ 5
2.4 Projeto do Filtro LC de Saída ................................................................................. 8
2.4.1 Cálculo do Indutor ........................................................................................... 9
2.4.2 Cálculo do Capacitor ..................................................................................... 11
CAPÍTULO 3 ................................................................................................................ 13
Modelo Matemático do Inversor e Controle de Tensão ............................................ 13
3.1 Função Transferência do Inversor de Tensão ....................................................... 14
3.2 Controlador Proposto............................................................................................ 16
3.3 Restrição da Derivada do Sinal de Controle......................................................... 18
CAPÍTULO 4 ................................................................................................................ 20
Projeto e Simulações..................................................................................................... 20
4.1 Cálculo do Circuito de Potência ........................................................................... 21
4.2 Cálculo do Índice de Modulação .......................................................................... 22
4.3 Função de Transferência do Inversor ................................................................... 23
4.4 Função Transferência do Controlador de Tensão ................................................. 25
4.5 Função de Transferência de Laço Aberto do Inversor ......................................... 28
4.6 Simulações ............................................................................................................ 29
CAPÍTULO 5 ................................................................................................................ 34
Considerações Finais .................................................................................................... 34
REFERÊNCIAS BIBLIOGRÁFICAS ....................................................................... 35
ii
Índice de Figuras
Figura 2-1 – Inversor de tensão monofásico................................................................................................. 2
Figura 2-2 – Impedância de saída do inversor monofásico de tensão. ......................................................... 2
Figura 2-3 – Detalhe da modulação três níveis aplicada ao inversor de tensão monofásico. ....................... 4
Figura 2-4 – Simplificação do inversor monofásico de tensão. .................................................................... 5
Figura 2-5 – Primeira etapa de operação do inversor de tensão. .................................................................. 5
Figura 2-6 – Segunda etapa de operação do inversor de tensão. .................................................................. 6
Figura 2-7 – Terceira etapa de operação do inversor de tensão. ................................................................... 6
Figura 2-8 – Quarta etapa de operação do inversor de tensão. ..................................................................... 7
Figura 2-9 – Tensão Vab e comando dos interruptores do inversor de tensão. ............................................ 7
Figura 2-10 – Tensões e correntes para dimensionamento do filtro de saída do inversor. ........................... 8
Figura 3-1 – Diagrama de blocos do inversor monofásico de tensão em malha fechada. .......................... 13
Figura 3-2 – Circuito para o modelo matemático. ...................................................................................... 13
Figura 3-3 – Tensão Vab durante o semiciclo positivo de tensão. ............................................................. 14
Figura 3-4 – Circuito utilizado para o controle da tensão de saída do inversor. ......................................... 17
Figura 4-1 – Circuito de potência implementado para simulações. ............................................................ 20
Figura 4-2 – Circuito de controle e comando implementado para simulações. .......................................... 21
Figura 4-3 – Forma de onda da tensão de referência sobreposta às portadoras triangulares. ..................... 23
Figura 4-4 – Diagrama de Bode em dB do módulo da planta simplificada para o inversor monofásico de
tensão.......................................................................................................................................................... 24
Figura 4-5 – Diagrama de Bode da fase da planta simplificada para o inversor monofásico de tensão. .... 25
Figura 4-6 – Diagrama de Bode em dB do módulo do controlador utilizado para o inversor. ................... 27
Figura 4-7 – Diagrama de Bode da fase para o controlador utilizado para o inversor................................ 28
Figura 4-8 – Diagrama de Bode em dB do módulo da função transferência de laço aberto do inversor. ... 28
Figura 4-9 - – Diagrama de Bode da fase da função transferência de laço aberto do inversor. .................. 29
Figura 4-10 – Tensão e corrente de saída para o inversor operando a vazio e com carga. ......................... 29
Figura 4-11 – Tensão de saída e sinal de controle sem carga conectada. ................................................... 30
Figura 4-12 – Tensão de saída, corrente no indutor e no capacitor sem carga conectada. ......................... 30
Figura 4-13 – Detalhe da transição quando se conecta carga 100%. .......................................................... 31
Figura 4-14 – Detalhe da transição quando a carga é desconectada. .......................................................... 31
Figura 4-15 – Correntes de saída, no capacitor e no indutor com carga 100%........................................... 32
Figura 4-16 – Tensão de saída e corrente no indutor. ................................................................................. 32
Figura 4-17 – Detalhe da transição de 100% para 50 % da tensão de saída e do sinal de controle. ........... 33
Figura 4-18 - Detalhe da transição de 50% para 100 % da tensão de saída e do sinal de controle. ............ 33
iii
Índice de Tabelas
Tabela 4-1 – Especificações para o projeto do inversor monofásico de tensão. ......................................... 20
Tabela 4-2 – Especificação dos elementos do circuito de potência. ........................................................... 22
Tabela 4-3 – Dimensionamento dos elementos do controlador. ................................................................. 27
iv
Simbologias e Abreviaturas
Símbolo
Descrição
Unidade
Z0
Impedância de carga
Lf
Indutor de Filtragem
H
Cf
Capacitor de Filtragem
F
R0
Resistência de carga
Tensão de pico da portadora
Vtri pk
V
triangular
Vref pk
V
Tensão de pico da referência
Relação entre as tensões de
M
referência e da portadora
Relação entre os períodos de
N
referência e da portadora
Adimensional
Adimensional
fs
Freqüência de comutação
Hz
fr
Freqüência da moduladora
Hz
Ts
Período da tensão Vab
s
Vi
Tensão de entrada
V
n
Relação entre espiras
Adimensional
V0 pk
Tensão de pico da saída
V
iL f
Ondulação de corrente no
vL f
Ondulação de tensão do
A
indutor de filtragem
V
capacitor de filtragem
Abreviatura
Significado
PWM
Pulse Width Modulation
SPWM
Sinuidal Pulse Width Modulation
v
CAPÍTULO 1
Introdução Geral
Os inversores de tensão têm uma vasta aplicação industrial e comercial,
dispondo de inúmeras referências bibliográficas como objeto de fonte de pesquisa. O
material a seguir apresentado visa aprimorar alguns conceitos a respeito da análise do
inversor de tensão monofásico aplicado a modulação três níveis com carga do tipo
resistiva. A estrutura utilizada é em ponte completa aplicada em grande escala para
potências elevadas e justifica-se sua implementação pelo fato de apresentar níveis
satisfatórios para os esforços de corrente e tensão quando comparado a estrutura meia
ponte.
A idéia fundamental dos inversores de tensão é proporcionar uma tensão
senoidal na saída do conversor. Para tanto, faz-se uso de um filtro LC na saída do
estágio inversor para que o conteúdo harmônico provocado pela operação em alta
freqüência dos interruptores seja filtrado e somente a freqüência fundamental seja
evidenciada. Para tal efeito é fundamental conhecer o comportamento dinâmico do
inversor e a partir daí, elaborar uma análise matemática do mesmo para tornar possível
o projeto do filtro de saída e do controlador de tensão para o sistema operando em
malha fechada.
O segundo capítulo abordará o tipo de modulação empregada e as etapas de
operação para o inversor de tensão ponte completa. O equacionamento para determinar
o projeto do filtro LC de saída estão apresentados no terceiro capítulo.
No quarto capítulo é proposto um projeto seguindo as devidas especificações
com o intuito de avaliar todo o equacionamento proposto por meio de simulações. As
conclusões são apresentadas no quinto capítulo. Por fim, o quinto capítulo trás as
considerações finais para todo o estudo exercido.
Gleyson Luiz Piazza
CAPÍTULO 2
Estudo do Inversor de Tensão Monofásico
2.1 Introdução
Este capítulo contempla a análise das etapas de operação do inversor de tensão
monofásico em ponte completa alimentando uma carga resistiva. Primeiramente,
justifica-se a estratégia de modulação empregada em tal estrutura, possibilitando assim
descrever as etapas de operação.
Com base nas etapas de operação do inversor de tensão modulado em três níveis,
elabora-se uma metodologia de projeto do filtro LC de saída, fundamental para a
filtragem da componente fundamental especificada em projeto.
A Figura 2-1 apresenta a estrutura em ponte completa do inversor de tensão
alimentando uma carga chamada de Z 0 . Esta carga é mostrada em detalhes através da
Figura 2-2, nota-se que a carga é do tipo resistiva acoplada a um filtro passivo, cujas
características serão especificadas no decorrer deste capítulo.
Figura 2-1 – Inversor de tensão monofásico.
a
Lf
Cf
R0
b
Figura 2-2 – Impedância de saída do inversor monofásico de tensão.
Gleyson Luiz Piazza
Estudo do Inversor de Tensão Monofásico
3
A partir da determinação das equações para o dimensionamento dos elementos
passivos será possível obter o modelo matemático do inversor de tensão e com isso
avaliar suas características em regime permanente e durante transitórios, fonte de estudo
do próximo capítulo.
2.2 Modulação Três Níveis SPWM (unipolar)
Este tópico tem por objetivo apresentar os principais métodos de modulação
empregados para realizar o acionamento e bloqueio dos interruptores. Diversas são as
técnicas empregadas, podendo-se citar a modulação por pulso único, por largura de
pulso único, por largura de pulsos múltiplos, iguais entre si, largura de pulsos
otimizadas e finalmente por largura de pulso senoidal ( SPWM ).
A modulação empregada neste trabalho é a senoidal de três níveis, também
conhecida como SPWM unipolar. A diferença entre a modulação senoidal de dois
níveis (bipolar) e de três níveis (unipolar) reside no fato de que a tensão aplicada nos
terminais ab do inversor, mostrados na Figura 2-1, apresenta apenas a tensão Vi
positiva ou negativa, enquanto que na modulação de três níveis a tensão pode ser
positiva, zero ou negativa. Outro fator relevante nesta comparação se dá quanto aos
pulsos da tensão Vab , que para três níveis é o dobro quando comparada à de dois níveis.
É importante apresentar algumas relações matemáticas importantes quando se
trata da modulação do tipo senoidal. Na equação (2.1) a variável M , refere-se à relação
entre a tensão da moduladora, no caso a onda senoidal, e da tensão da moduladora
triangular. Esta relação é importante, pois é a partir desta que os pulsos de comando são
obtidos para o conversor.
M
Vref pk
Vtri pk
(2.1)
As equações (2.2) e (2.3) são relações entre períodos e freqüências da
moduladora e portadora, respectivamente. Onde f p é a freqüência da moduladora,
enquanto que f s é a freqüência da portadora.
N
Ts
2 Tr
(2.2)
Gleyson Luiz Piazza
Estudo do Inversor de Tensão Monofásico
mf
4
fr
2 fs
(2.3)
Relacionando (2.2) e (2.3), chega-se a equação (2.4).
N
mf
(2.4)
2
A Figura 2-3 apresenta a modulação senoidal de três níveis, cuja moduladora é
uma onda senoidal e a portadora uma onda do tipo triangular. Este tipo de modulação é
obtido a partir da intersecção de duas ondas triangulares, chamadas de portadoras, com
uma onda senoidal ajustada na freqüência de saída desejada, esta onda senoidal é
conhecida como moduladora. As tensões Van e Vbn são os pulsos obtidos para as chaves
S1 e S3 e S2 e S4 . A diferença entre estas tensões geram a tensão Vab cuja modulação
três níveis écomprovada.
Vtri1
Vtri2
Vsin
VAN
VBN
VAB
Figura 2-3 – Detalhe da modulação três níveis aplicada ao inversor de tensão monofásico.
Lembrando que a modulação a três níveis é implementada para o inversor em
ponte completa, desta forma, a Figura 2-3 apresenta os pulsos gerados da intersecção da
moduladora com a portadora. Para gerar os comandos nos interruptores são necessários
que as duas ondas triangulares estejam defasadas 180 graus uma da outra.
A grande vantagem da modulação três níveis quando comparada com a
modulação a dois níveis reside no fato de que o número de pulsos por semiperíodo
gerado na modulação três níveis é o dobro, em relação à de dois níveis, considerando
Gleyson Luiz Piazza
Estudo do Inversor de Tensão Monofásico
5
que a freqüência de comutação dos interruptores é a mesma. O resultado destes pulsos
na modulação três níveis implica em harmônicos da tensão de saída duas vezes superior
e conseqüentemente o projeto do filtro de saída resulta em volume e peso menores.
2.3 Etapas de Operação do Inversor de Tensão
As etapas de operação do inversor de tensão são apresentadas neste tópico
considerando que a modulação implementada seja a de três níveis. Para tanto, as etapas
descritas contemplam meio período de comutação e para simplificação do circuito será
sugerido à utilização de uma fonte de corrente que durante este meio período não
inverte o sentido de condução. Esta fonte de corrente substitui a impedância de carga
Z 0 , que também pode ser acoplada a um transformador.
Figura 2-4 – Simplificação do inversor monofásico de tensão.
Primeira Etapa de Operação ( t0 ; t1 ):
Na primeira etapa de operação os interruptores S1 e S4 conduzem a corrente de
carga, transferindo potência para a saída. É importante observar que durante este
intervalo de tempo os interruptores S2 e S3 devem permanecer bloqueados para evitar
um funcionamento inadequado do inversor. A Figura 2-5 apresenta a etapa descrita.
Figura 2-5 – Primeira etapa de operação do inversor de tensão.
Gleyson Luiz Piazza
Estudo do Inversor de Tensão Monofásico
6
Segunda Etapa de Operação ( t1 ; t4 ):
No instante t1 o interruptor S4 bloqueia polarizando o diodo D2 , com isso o
sentido da corrente é mantido, representando uma etapa de roda livre, ou seja, sem
transferência de potência da entrada para a saída.
No instante t2 S2 é habilitado, porém não há condução do mesmo devido
sentido de corrente, em t3 o interruptor S2 bloqueia. Esta etapa termina no instante t4
quando S4 é habilitado. A Figura 2-6 apresenta a segunda etapa de operação.
Figura 2-6 – Segunda etapa de operação do inversor de tensão.
Terceira Etapa de Operação ( t4 ; t5 ):
O início da terceira etapa se dá pela condução simultânea de S1 e S4 , remetendo
a primeira etapa já descrita. A terceira etapa de operação do inversor de tensão está
mostrada na Figura 2-7.
Figura 2-7 – Terceira etapa de operação do inversor de tensão.
Quarta Etapa de Operação ( t5 ; t8 ):
Nesta etapa o interruptor S1 é bloqueado em t5 , com isso, o diodo D3 entra em
condução, representando uma etapa de roda livre, como demonstrado na Figura 2-8. Em
t6 , S3 é habilitado, mas não conduz devido o sentido de corrente, somente em t7 que
S3 bloqueia. Esta etapa de operação tem seu término no instante de tempo t8 .
Gleyson Luiz Piazza
Estudo do Inversor de Tensão Monofásico
7
Figura 2-8 – Quarta etapa de operação do inversor de tensão.
Na Figura 2-9 apresenta-se de forma simplificada a tensão Vab e os pulsos de
comando para os interruptores do inversor de tensão durante meio período de
comutação.
Vab
Vi
S1
S2
S3
S4
t1
t2
t3
t4
t5
t6
t7
t8
Ts
Figura 2-9 – Tensão Vab e comando dos interruptores do inversor de tensão.
Gleyson Luiz Piazza
Estudo do Inversor de Tensão Monofásico
8
2.4 Projeto do Filtro LC de Saída
Como mencionado anteriormente o projeto do filtro L f C f de saída deve levar
em conta que a freqüência da tensão de saída é o dobro da freqüência de comutação dos
interruptores.
O projeto do filtro deve levar em conta a máxima ondulação de corrente para o
indutor e de tensão para o capacitor. A Figura 2-10 apresenta de forma simplificada a
tensão no indutor, a ondulação de corrente em L f e a ondulação de tensão no capacitor
Cf .
VLf
n Vi V0 pk sin(r t )
t1
t2
V0 pk sin(r t )
Ilf
iL f
Vcf
vC f
Ts
Figura 2-10 – Tensões e correntes para dimensionamento do filtro de saída do inversor.
Gleyson Luiz Piazza
Estudo do Inversor de Tensão Monofásico
9
2.4.1 Cálculo do Indutor
A partir da Figura 2-10, determinam-se as equações para a tensão sobre o
indutor, onde o intervalo de tempo t1 representa a condução dos interruptores S1 e S4 ,
enquanto que o intervalo de tempo t2 é definido pela condução de S1 com o diodo D2 ,
apesar de S2 estar habilitado. O equacionamento para o projeto do filtro de saída deve
considerar que o período da tensão Vab é a metade do período de comutação, como
sugerido em (2.5).
Ts
Ts
2
(2.5)
A equação (2.6) representa a tensão do indutor durante o intervalo de tempo t1 ,
enquanto que no intervalo de tempo t2 a tensão no indutor é definida por (2.7). Nota-se
que o índice n representa a relação de espiras do transformador, caso o mesmo seja
utilizado.
Lf
Lf
diL f (t )
dt
diL f (t )
dt
n Vi V0 pk sin(r t )
(2.6)
V0 pk sin(r t )
(2.7)
Reescrevendo (2.6) e (2.7), obtém-se (2.8).
iL f (t )
n Vi V0 pk sin(r t )
Lf
t1
iL f (t )
L f t V0 pk sin(r t )
2
(2.8)
Logo, os intervalos de tempo t1 e t2 são dados respectivamente por (2.9) e
(2.10).
t1
L f iL f (t )
n Vi V0 pk sin(r t )
t2
L f iL f (t )
V0 pk sin(r t )
(2.9)
(2.10)
Gleyson Luiz Piazza
Estudo do Inversor de Tensão Monofásico
10
Sabe-se que:
Ts t1 t2
(2.11)
Portanto, substituindo (2.9) e (2.10) em (2.11) e considerando que Ts é a
metade do período de comutação, chega-se na equação (2.12).
L f iL f (t )
L f iL f (t )
Ts
2 n Vi V0 pk sin(r t ) V0 pk sin(r t )
(2.12)
Desenvolvendo a equação (2.12) e isolando a ondulação de corrente do indutor,
obtém–se (2.13).
iL f (t )
n Vi V0 pk sin(r t ) V0 pk 2 sin 2 (r t )
(2.13)
2 n f s L f Vi
A equação (2.13) é parametrizada conforme apresentado em (2.14).
iL f (t )
2 L f iL f (t )
Ts n Vi
V0 pk
V0 pk sin 2 (r t )
sin(r t )
n Vi
n Vi
(2.14)
A máxima ondulação pode ser obtida derivando-se a equação (2.14) e igualando
a zero, como mostra
d iL f
d r t
cos(r t )
2 V0 pk sin(r t ) cos(r t )
n Vi
0
(2.15)
De (2.15) resulta nas seguintes soluções apresentadas em (2.16).
n Vi
1
;V0 pk
d iL f 4
2
V
d r t 0 pk V0 pk
1
n Vi n Vi
(2.16)
n Vi
; V0 pk
2
O que implica na ondulação de corrente do indutor definida em (2.17).
Gleyson Luiz Piazza
Estudo do Inversor de Tensão Monofásico
n Vi
8 f L
s
f
iL f
V0 pk
2 fs Lf
; V0 pk
11
n Vi
2
V0
1 pk
n V
i
(2.17)
n Vi
; V0 pk
2
Da mesma forma, pode-se evidenciar (2.17) em termos da indutância L f .
n Vi
8 f i
s
Lf
Lf
V0 pk
2 f i
s
Lf
; V0 pk
n Vi
2
V0
1 pk
n V
i
n Vi
; V0 pk
2
(2.18)
2.4.2 Cálculo do Capacitor
A capacitância do filtro de saída é determinada em função da máxima ondulação
de tensão, que por sua vez, está diretamente ligada à máxima ondulação da corrente do
indutor L f . Estas ondulações de tensão e de corrente estão apresentadas na Figura 2-10.
Assume-se que toda componente alternada de alta freqüência circule através do
capacitor C f , pode-se então calcular a ondulação de tensão do capacitor considerando a
variação de carga do mesmo, como mostra (2.19).
q C f vC f
(2.19)
Mas,
1
q i t
2
(2.20)
Assim, tem-se (2.21).
1 iL T
q f s
2 2
2
(2.21)
Substituindo (2.21) em (2.19), obtém-se (2.22).
1 iL f
C f vC f
8 f s
(2.22)
Gleyson Luiz Piazza
Estudo do Inversor de Tensão Monofásico
12
Considera-se que a máxima ondulação da tensão do capacitor do filtro é
calculada em relação da máxima ondulação de corrente do indutor, como descrito
anteriormente. Assim, substituindo iL f em (2.22) obtém-se (2.23).
vC f
n Vi
n Vi
1
128 f 2 L C ; V0 pk 2
s
f
f
V0 pk
V0 pk
n Vi
1
1
; V0 pk
2
16 f s L f C f n Vi
2
(2.23)
Reescrevendo (2.23) chega-se em (2.24).
n Vi
n Vi
1
128 f 2 L v ; V0 pk 2
s
f
Cf
Cf
V0 pk
V0 pk
n Vi
1
1
; V0 pk
16 f 2 L v n V
2
s
f
Cf
i
(2.24)
Gleyson Luiz Piazza
CAPÍTULO 3
Modelo Matemático do Inversor e Controle de Tensão
No projeto de um inversor, a tensão de saída é a variável especificada, cuja
amplitude, freqüência e taxa de distorção harmônica são parâmetros que devem ser
atendidos. A proposta deste capítulo visa aprimorar os conceitos a respeito do modelo
matemático do inversor implementado para o projeto do compensador.
Deve-se considerar que o inversor de tensão deve atender a uma tensão de
referência, portanto é fundamental que o sistema quando operado em malha fechada
apresente uma malha de tensão que atenta as especificações mais críticas para o sistema.
Portanto, necessita-se determinar a função transferência entre a tensão de saída e o sinal
de controle.
A Figura 3-1 mostra o diagrama de blocos para o sistema em malha fechada. Já a
Figura 3-2 representa o circuito equivalente para determinar a função transferência do
inversor de tensão, onde f m (t ) é chamada função de modulação.
Figura 3-1 – Diagrama de blocos do inversor monofásico de tensão em malha fechada.
Figura 3-2 – Circuito para o modelo matemático.
Gleyson Luiz Piazza
Modelo Matemático do Inversor e Controle de Tensão
14
3.1 Função Transferência do Inversor de Tensão
Na modulação três níveis, a forma de onda da tensão nos terminais do filtro
durante o semiciclo positivo de Vab é mostrada na Figura 3-3. De acordo com a figura o
intervalo de tempo T representa a condução de S1 e S4 , enquanto que Ts T referese à condução de S1 e S2 ou S3 e S4 . Portanto, não se podem confundir estes intervalos
com a razão cíclica, mesmo que estas estejam diretamente ligadas
Vab
Vi
T
Ts T
Ts
Figura 3-3 – Tensão Vab durante o semiciclo positivo de tensão.
A tensão média quase instantânea de Vab é dada por (3.1).
Vabmed
T n Vi
Ts
(3.1)
Define-se (3.2) como as razões cíclicas para as conduções dos interruptores. È
importante que estas razões cíclicas são calculadas em função de dois períodos de
comutação devido à modulação três níveis empregadas.
d1 (t )
Ts T
2 Ts
(3.2)
T T
d 2 (t ) s
2 Ts
Onde
T Ts 1 2 d 2 (t )
(3.3)
Assim, pode-se obter com as devidas manipulações matemáticas (3.4).
Vabmed n Vi 1 2 d 2 (t )
(3.4)
Gleyson Luiz Piazza
Modelo Matemático do Inversor e Controle de Tensão
15
A razão cíclica varia de acordo com uma função de modulação definida na
Figura 3-2 como f m (t ) , o que implica em considerar a relação (3.5).
1
d1 (t ) 1 f m (t )
2
1
d 2 (t ) 1 f m (t )
2
(3.5)
Onde,
f m (t ) 1 2 d 2 (t )
(3.6)
Assim, substituindo (3.6) em (3.4), obtém-se (3.7) e conseqüentemente (3.8).
Vabmed Vi f m (t )
Vabmed ( s )
f m (s)
(3.7)
Vi
(3.8)
Equacionando o circuito da Figura 3-2, tem-se (3.9).
f m (t ) Vi vL f (t ) rf iL f (t ) v0 (t )
(3.9)
Onde,
iL f (t ) iC f (t ) iR0 (t )
(3.10)
Mas,
dv0 (t )
dt
v (t )
iR0 (t ) 0
R0
iC f (t ) C f
(3.11)
Substituindo (3.11) em (3.9) e levando em conta (3.10), tem-se (3.12).
f m (t ) Vi L f
d iC f (t ) iR0 (t )
dt
rf iC f (t ) iR0 (t ) v0 (t )
(3.12)
Resolvendo a equação (3.12), obtém-se (3.13).
Gleyson Luiz Piazza
Modelo Matemático do Inversor e Controle de Tensão
16
dv0 (t ) rf
d 2 v0 (t ) L f
f m (t ) Vi L f C f
r
C
1 v0 (t )
f
f
2
dt
R0
dt
R0
(3.13)
Aplicando a transformação de Laplace em (3.13), chega-se na equação (3.14).
L
r
f m ( s ) Vi L f C f s 2 f rf C f s f 1 V0 ( s )
R0
R0
(3.14)
Implicando na seguinte função de transferência para o inversor de tensão
monofásico.
V0 ( s )
Vi
f m ( s)
Lf
r
2
rf C f s f 1
Lf C f s
R0
R0
(3.15)
Considerando que o comportamento da função de modulação é a relação entre a
tensão de controle e a tensão da portadora, conforme indicado em (3.16).
f m ( s)
Vc ( s )
Vtri pk
(3.16)
Logo,
V0 ( s )
V
1
i
Vc ( s ) Vtri pk
Lf
2
rf C f
Lf C f s
R0
(3.17)
rf
s 1
R0
Considerando que para o inversor, o projeto do controlador deverá atender a
situação mais crítica de operação, a qual existe quando o mesmo trabalha a vazio, ou
seja, a carga é considerada infinita, resultando na seguinte função de transferência
definida em (3.18). As resitências do indutor e do capacitor são desprezadas.
V0 ( s )
V
1
i
Vc ( s ) Vtri pk L f C f s 2 1
(3.18)
3.2 Controlador Proposto
Obtida a função transferência do inversor monofásico de tensão é possível
através da equação (3.18) propor a implementação de um controle de tensão com o
objetivo de atender especificações de projeto que visam preservar a tensão de saída
Gleyson Luiz Piazza
Modelo Matemático do Inversor e Controle de Tensão
17
independente de qualquer variação de carga ou perturbação que possa de alguma forma
se manifestar.
O circuito proposto para o controle é muito parecido com o proporcional integral
derivativo, PID, como pode ser observado na Figura 3-4. Este controle adiciona ao
sistema dois zeros, um pólo na origem e um pólo deslocado em altas freqüências.
Figura 3-4 – Circuito utilizado para o controle da tensão de saída do inversor.
Através do circuito da Figura 3-4 determina-se a função transferência do
controlador Cv ( s ) apresentada na equação (3.19).
Cv ( s )
sC
fz
R fz 1 sCi Riz 1
sC fz sCi Rip R fz Rip R fz
(3.19)
A qual pode ser reescrita por (3.20).
Cv ( s ) kv
s z1 s z2
s s p1
(3.20)
Onde, o ganho do compensador é dado pela equação (3.21).
kv
R fz
Rip
(3.21)
As freqüências dos dois zeros são determinadas pelas equações (3.22) e (3.23).
f z1
1
2 C fz R fz
(3.22)
f z2
1
2 Ci Riz
(3.23)
Gleyson Luiz Piazza
Modelo Matemático do Inversor e Controle de Tensão
18
O controlador apresenta ainda dois pólos um fixado na origem e outro alocado
conforme a relação (3.24).
f p1
Rip Riz
(3.24)
2 Ci Rip Riz
3.3 Restrição da Derivada do Sinal de Controle
O projeto do filtro de saída do inversor tem por objetivo filtrar as componentes
de freqüências indesejáveis, permitindo evidenciar a componente fundamental da
moduladora. No entanto, por mais bem executado o projeto do filtro, sempre haverá
uma pequena ondulação de tensão e corrente na saída provocada pelos harmônicos mais
significativos. Esta ondulação da tensão de saída se manifesta no sinal proveniente do
sensor de tensão, este sinal será atenuado, atuará no compensador e por fim é aplicado
ao modulador.
Sabe-se que o sinal originado da ação de controle é aplicado diretamente no
modulador, se por ventura a ondulação presente neste sinal apresentar múltiplos
cruzamentos com relação ao sinal da portadora, implicará que os pulsos gerados para os
interruptores sejam diferentes do esperado.
Portanto é necessário avaliar no projeto se a derivada do sinal de controle é
maior ou menor que a derivada do sinal da portadora. No caso de ser menor, os pulsos
gerados para os interruptores são adequados, caso contrário, haverá múltiplos
cruzamentos.
A equação (3.25) apresenta o comportamento da amplitude da
componente de tensão em alta freqüência.
vC f (t )
V V sin( t ) V
i
0 pk
1
0 pk
sin(1t )
64 f s 2 L f C f Vi
sin(2 s t )
(3.25)
A máxima ondulação do sinal de controle é obtida considerando a máxima
ondulação da tensão da tensão do capacitor de filtragem, como apresentado na equação
(3.26).
vcmax (t )
Vi K s kv
128 f s 2 L f C f Vi
sin(2 s t cv )
(3.26)
Gleyson Luiz Piazza
Modelo Matemático do Inversor e Controle de Tensão
19
Onde K s e kv são os ganhos do sensor de tensão e do compensador,
respectivamente. Já cv é o ângulo do compensador. Derivando a expressão (3.26),
obtém-se (3.27).
d vcmax (t )
dt
K s kv
(3.27)
32 f s L f C f Vi
A máxima derivada da tensão da portadora fica definida por (3.28).
dVtri (t ) 4 Vtri pk
dt
Ts
(3.28)
Portanto, para evitar múltiplos cruzamentos que geram um funcionamento
inadequado ao inversor é necessário que a equação (3.28) seja maior que (3.27).
Gleyson Luiz Piazza
CAPÍTULO 4
Projeto e Simulações
Para comprovar os estudos até então efetuados propõem-se através das
especificações apresentadas na Tabela 4-1, um exemplo de projeto para o inversor
operando em malha fechada sem utilizar transformador.
Tabela 4-1 – Especificações para o projeto do inversor monofásico de tensão.
Grandeza
Valor Nominal
Tensão de alimentação
400 V
Tensão eficaz de saída
220 V
Potência de saída
10 kW
Freqüência de saída
60 Hz z
Freqüência de comutação
20 kHz
Ondulação da corrente do indutor
15%
Ondulação da tensão do capacitor
1%
Tensão de pico da moduladora
3,11V
Os circuitos utilizados para as simulações estão apresentados na Figura 4-1 e na
Figura 4-2, representando respectivamente o circuito de potência, de controle e
comando dos interruptores.
Figura 4-1 – Circuito de potência implementado para simulações.
Gleyson Luiz Piazza
Projeto e Simulações
21
Figura 4-2 – Circuito de controle e comando implementado para simulações.
4.1 Cálculo do Circuito de Potência
A partir das especificações da Tabela 4-1 inicia-se o dimensionamento dos
componentes do circuito de potência.
P0
V0efz 2
R0
(4.1)
Por meio de (4.1), obtém-se a resistência de carga R0 .
R0 4,84 k
(4.2)
A corrente de saída do inversor e a respectiva ondulação de corrente estão
definidas em (4.4) e (4.7).
I 0efz
V0efz
R0
(4.3)
I 0efz 45, 45 A
(4.4)
I L f 0,15 I 0 pk
(4.5)
VC f 0, 01 V0 pk
(4.6)
I L f 9, 64 A
(4.7)
Onde,
Gleyson Luiz Piazza
Projeto e Simulações
22
I 0 pk 2 I 0efz
(4.8)
V0 pk 2 V0efz
Com isso, utilizando a máxima ondulação da corrente no indutor obtém-se a
equação (4.10).
Vi
8 f s I L f
(4.9)
L f 259,3 H
(4.10)
Lf
Da mesma forma, se expressa o valor do capacitor de filtragem do inversor
através de (4.12).
Cf
Vi
1
2
128 f s L f VC f
(4.11)
C f 9, 69 F
(4.12)
A freqüência de ressonância fica definida por (4.14).
f0
1
2 L f C f
(4.13)
f 0 3,175 kHz
(4.14)
Desta forma, a Tabela 4-2 apresenta o dimensionamento dos elementos do
circuito de potência do inversor monofásico de tensão.
Tabela 4-2 – Especificação dos elementos do circuito de potência.
Grandeza
Valor Nominal
Indutor de filtragem
259, 3 H
Capacitor de filtragem
9, 69 F
Resistência de carga
4,84 k
Freqüência de ressonância
259,3 H
4.2 Cálculo do Índice de Modulação
Sabendo a tensão de entrada e a tensão máxima de saída, obtém-se o índice de
modulação do sistema, definido em (4.16).
Gleyson Luiz Piazza
Projeto e Simulações
M
23
Vi
V0 pk
(4.15)
M 0, 775
(4.16)
Desta forma com o valor especificado para a máxima tensão de referência
aplicado no sistema em malha fechada, obtém-se a tensão de pico da portadora
triangular como mostra a equação (4.18).
Vtri pk
Vref pk
(4.17)
M
Vtri pk 4V
(4.18)
A Figura 4-3 apresenta os sinais das portadoras sendo que a moduladora esta
sobreposta a tais sinais. A freqüência da portadora é fixada em 20 kHz , enquanto que a
freqüência da moduladora é 60 Hz .
Vtri1
Vtri2
Vref
4.00
2.00
0.0
-2.00
-4.00
0.0
0.02
0.04
0.06
0.08
0.10
Time (s)
Figura 4-3 – Forma de onda da tensão de referência sobreposta às portadoras triangulares.
4.3 Função de Transferência do Inversor
A função de transferência H ( s) representa a planta do inversor P( s) e o ganho
do sensor de tensão K s . A função P( s) é obtida para o caso mais crítico ao qual o
sistema possa ser submetido. O ganho do sensor representado por K s define a relação
entre a tensão de referência e a tensão de sápida do filtro, como apresenta
Gleyson Luiz Piazza
Projeto e Simulações
Ks
24
Vref
(4.19)
V0 pk
Através das especificações da Tabela 4-1, apresentam-se na Figura 4-4 e na
Figura 4-5, os diagramas de Bode de módulo (em dB) e fase da função de transferência
H ( s ) . Verifica-se no diagrama de módulo o efeito provocado pelo duplo pólo presente
na planta do inversor. Este duplo pólo situa-se exatamente na freqüência de ressonância
do filtro de saída.
É com base nestes gráficos da Figura 4-4 e da Figura 4-5 que se projeta o
controlador descrito no capítulo anterior. Será necessário suavizar este duplo pólo e
garantir que o sistema em malha fechada possa atender os critérios de margem de fase e
do ganho na freqüência de cruzamento. Desta forma, os zeros do controlador serão
responsáveis para atenuar o duplo pólo, já o pólo na origem garante erro nulo em
regime, enquanto que o segundo pólo é deslocado para a alta freqüência de forma a
eliminar os efeitos provocados pela comutação ou qualquer interferência em alta
freqüência.
Figura 4-4 – Diagrama de Bode em dB do módulo da planta simplificada para o inversor
monofásico de tensão.
Gleyson Luiz Piazza
Projeto e Simulações
25
Figura 4-5 – Diagrama de Bode da fase da planta simplificada para o inversor monofásico de
tensão.
Antes de iniciar o projeto do controlador especifica-se que a freqüência de
cruzamento desejada seja definida pela equação (4.20).
fc
fs
2
(4.20)
Esta freqüência é quatro vezes menor que a freqüência da tensão aplicada nos
terminais de carga do inversor.
Os diagramas de Bode trazem informações valiosas para projetar um controlador
adequado ao sistema. Através do diagrama de módulo defini-se que o ganho na
freqüência de cruzamento é definido por (4.21).
k1 19, 005 dB
(4.21)
Enquanto que a margem de fase na freqüência de cruzamento é dada por (4.22).
MF 180
(4.22)
4.4 Função Transferência do Controlador de Tensão
Com base no que foi descrito no tópico anterior propõem-se que os dois zeros
sejam alocados exatamente na freqüência de ressonância, como definido na equação
(4.23).
f z1 f z2 f 0
1
2 L f C f
(4.23)
Gleyson Luiz Piazza
Projeto e Simulações
26
Logo, com a função transferência do controlador e estabelecendo que o valor do
resistor Riz seja dado por
Riz 10 k
(4.24)
Com base em (4.24) e (4.23) determinam-se os valores para os componentes do
controlador responsáveis pelos zeros da função Cv ( s ) .
Ci
1
2 Riz f z1
(4.25)
E
C fz
1
2 R fz f z2
(4.26)
Possibilitando determinar o valor do capacitor Ci como mostra (4.27).
Ci 5, 02 nF
Rip
(4.27)
Riz
2 Ci Riz f p1 1
(4.28)
Sendo que a frequencia do pólo é 25 vezes maior que a frequencia de
ressonância. Através de (4.28), obtém-se (4.29).
Rip 416, 67
(4.29)
Avaliando somente o ganho do controlador, observa-se que o ganho na
freqüência de corte é dado por
k pz 17, 23 dB
(4.30)
Portanto o ganho kv do controlador é a soma em módulo do ganho de H ( s) e do
ganho provocado pelos pólos e zeros do controle, assim, tem-se (4.31).
kv 10
H ( f c ) k2
20
(4.31)
Pode-se escrever (4.32).
Gleyson Luiz Piazza
Projeto e Simulações
27
R fz kv Rip
(4.32)
Obtendo,
R fz 27 k
(4.33)
E desta forma,
C fz 1,86 nF
(4.34)
A Tabela 4-3 apresenta o dimensionamento do circuito de controle do inversor
de tensão.
Tabela 4-3 – Dimensionamento dos elementos do controlador.
Grandeza
Valor Nominal
Rip
416, 67
Riz
10 k
Ci
5, 02 nF
R fz
27 k
C fz
1,86 nF
A Figura 4-6 e a Figura 4-7 mostram os diagramas de Bode do controlador de
tensão do inversor, para o módulo (em dB) e fase, respectivamente.
Figura 4-6 – Diagrama de Bode em dB do módulo do controlador utilizado para o inversor.
Gleyson Luiz Piazza
Projeto e Simulações
28
Figura 4-7 – Diagrama de Bode da fase para o controlador utilizado para o inversor.
4.5 Função de Transferência de Laço Aberto do Inversor
A função de transferência de laço aberto contempla a planta do inversor, o ganho
do sensor e a função transferência do controlador. Multiplicando estes termos obtêm-se
os diagramas de Bode de módulo (em dB) e fase mostrados na Figura 4-8 e na Figura
4-9, respectivamente.
Os gráficos apresentados satisfazem os critérios de freqüência de cruzamento e
margem de fase requerida, que para este caso é de 52 . Portanto o sistema é estável
permitindo através da ação de controle o seguimento da tensão de referência.
Figura 4-8 – Diagrama de Bode em dB do módulo da função transferência de laço aberto do
inversor.
Gleyson Luiz Piazza
Projeto e Simulações
29
Figura 4-9 - – Diagrama de Bode da fase da função transferência de laço aberto do inversor.
4.6 Simulações
A Figura 4-10 apresenta a tensão e a corrente de saída para a transição entre
vazio e carga.
Figura 4-10 – Tensão e corrente de saída para o inversor operando a vazio e com carga.
Observa-se que no instante 54,17 ms o sistema passa a atuar com 100% de
carga, da mesma forma no instante 104,17 ms , ocorre novamente à transição para o
inversor operando a vazio.
A Figura 4-11 e a Figura 4-12 apresentam a tensão do controlador e as correntes
no indutor e capacitor para o inversor operando a vazio, respectivamente.
Gleyson Luiz Piazza
Projeto e Simulações
30
Figura 4-11 – Tensão de saída e sinal de controle sem carga conectada.
Figura 4-12 – Tensão de saída, corrente no indutor e no capacitor sem carga conectada.
Os detalhes da tensão de saída e do sinal do controlador estão apresentados na
Figura 4-13 e na Figura 4-14, representando respectivamente a transição de vazio para
carga e de carga para vazio.
Gleyson Luiz Piazza
Projeto e Simulações
31
Figura 4-13 – Detalhe da transição quando se conecta carga 100%.
Figura 4-14 – Detalhe da transição quando a carga é desconectada.
As próximas simulações são efetuadas para o sistema operando com carga sendo
que em determinados instantes de tempo há transição de carga de 100% para 50 % e de
50% para 100%. Os instantes são os mesmos para o caso em que o inversor operava a
vazio e com 100% de carga.
A Figura 4-15 mostra as correntes de saída, do indutor e capacitor de filtragem
para o caso em que o inversor trabalhe com 100% de carga.
Gleyson Luiz Piazza
Projeto e Simulações
32
Figura 4-15 – Correntes de saída, no capacitor e no indutor com carga 100%.
A Figura 4-16 apresenta a tensão e a corrente de saída do inversor monofásico
de tensão durante o transitório de carga.
Figura 4-16 – Tensão de saída e corrente no indutor.
Os detalhes da tensão de saída e do sinal de controle para os transitórios de carga
estão apresentados na Figura 4-17 e Figura 4-18.
Gleyson Luiz Piazza
Projeto e Simulações
33
Figura 4-17 – Detalhe da transição de 100% para 50 % da tensão de saída e do sinal de controle.
Figura 4-18 - Detalhe da transição de 50% para 100 % da tensão de saída e do sinal de controle.
Gleyson Luiz Piazza
CAPÍTULO 5
Considerações Finais
Este trabalho possibilitou o estudo das etapas de operação do inversor
monofásico de tensão alimentando carga resistiva e com modulação do tipo senoidal
três níveis.
Após a compreensão da modulação aplicada ao inversor monofásico ponte
completa, pode-se avaliar as etapas de operação provocadas por tal modulação. Da
mesma forma, possibilitou-se o projeto do filtro de saída acoplado à carga, visando
eliminar os efeitos da alta freqüência provocados pela comutação dos interruptores. O
projeto do filtro pode ser comprovado no segundo capítulo e apresentou resultados
satisfatórios quando efetuada a simulação do inversor, comprovando o seguimento da
tensão de referência.
A partir do projeto do filtro de saída e conhecendo a tensão aplicada nos
terminais de carga é obtido um modelo matemático do inversor de tensão, bem como se
propõem a implementação de um controlador, responsável por permitir adequar as
especificações de tensão de saída, freqüência e taxa de distorção harmônica. Este estudo
está apresentado no terceiro capítulo.
Por fim, com todos os equacionamentos e conhecimentos adquiridos obtém-se
através de parâmetros pré-determinados um projeto em malha fechada. Os cálculos
permitem obter todos os elementos que compõem os circuitos de potência, controle e
comando. As simulações apresentadas no quarto capítulo possibilitam a variação do
inversor operando a vazio e com degrau de carga e os resultados obtidos comprovaram
que os requisitos da tensão de saída foram atendidos em sua plenitude.
Gleyson Luiz Piazza
REFERÊNCIAS BIBLIOGRÁFICAS
[1]
F. Gerent, “Metodologia de Projeto de Inversores Monofásicos de tensão Para
Cargas Não-Lineares”, Dissertação De Mestrado, Universidade Federal De Santa
Catarina, 2005;
[2]
K. Ogata, “Modern Control Engineering”, Prentice-Hall Inc., 1997.
[3]
I. Barbi, D.C. Martins, “Introdução ao Estudo dos Conversores CC-CA”, Edição
dos autores, Florianópolis, 2005;
Gleyson Luiz Piazza
UNIVERSIDADE FEDERAL DE SANTA CATARINA
CENTRO TECNOLÓGICO
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
INVERSOR TRIFÁSICO
DISCIPLINA:
EEL.6570 TÓPICO ORIENTADO – INVERSORES
TRIFÁSICOS
PROFESSOR: IVO BARBI, DR. ING.
ALUNO: GLEYSON LUIZ PIAZZA
01/12/2008
Sumário
ÍNDICE DE FIGURAS
iii
ÍNDICE DE TABELAS
iv
SIMBOLOGIA E ABREVIATURAS
v
CAPÍTULO 1 .................................................................................................................. 1
Introdução Geral ............................................................................................................ 1
CAPÍTULO 2 .................................................................................................................. 2
Conceitos do Inversor de Tensão Trifásico .................................................................. 2
2.1 IntroduçãoEquation Chapter 2 Section 2 ................................................................ 2
2.2 Modulação Senoidal ............................................................................................... 7
2.3 Tensão de Braço e Função de Razão Cíclica .......................................................... 9
2.4 Tensões de Referência .......................................................................................... 10
CAPÍTULO 3 ................................................................................................................ 16
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke ... 16
3.1 IntroduçãoEquation Chapter 3 Section 3 .............................................................. 16
3.2 Equações Diferenciais do Inversor Trifásico........................................................ 17
3.2.1 Tensões dos Indutores ................................................................................... 18
3.3 Transformada 0 .............................................................................................. 19
3.4 Projeto do Filtro LC de Saída ............................................................................... 22
3.4.1 Cálculo do Indutor ......................................................................................... 23
3.4.2 Cálculo do Capacitor ..................................................................................... 26
3.5 Controle das Tensões de Linha Utilizando Transformada de Clarke................... 31
3.5.1 Controlador Proposto..................................................................................... 32
CAPÍTULO 4 ................................................................................................................ 34
Exemplo de Projeto e Simulações ............................................................................... 34
4.1 Introdução ............................................................................................................. 34
4.2 Cálculo do Circuito de Potência ........................................................................... 34
4.3 Cálculo do Índice de Modulação .......................................................................... 36
4.4 Função de Transferência do Inversor ................................................................... 37
4.5 Função Transferência do Controlador de Tensão ................................................. 39
4.6 Função de Transferência de Laço Aberto do Inversor ......................................... 42
ii
4.7 Descrição dos Circuitos de Simulação ................................................................. 43
4.7.1 Resultados de Simulação ............................................................................... 46
CAPÍTULO 5 ................................................................................................................ 52
Considerações Finais .................................................................................................... 52
REFERÊNCIAS BIBLIOGRÁFICAS ....................................................................... 53
iii
Índice de Figuras
Figura 2-1 – Inversor de tensão trifásico tipo 180 alimentando carga trifásica resistiva conectada em Y .
...................................................................................................................................................................... 2
Figura 2-2 – Tensões de fase, linha e pulsos de comando para os interruptores do inversor trifásico. ........ 4
Figura 2-3 –. Tensões referenciais para o estudo do inversor trifásico......................................................... 5
Figura 2-4 – Inversor trifásico alimentando uma carga resistiva com adição de um filtro de saída. ............ 7
Figura 2-5 – Detalhe da modulação senoidal aplicada ao inversor de tensão trifásico. ................................ 8
Figura 2-6 – Representação da tensão VA (t ) . ............................................................................................. 9
Figura 2-7 – Circuito do inversor trifásico representado pelas tensões de braço........................................ 10
Figura 2-8 – Circuito para análise das tensões de referência. ..................................................................... 11
Figura 3-1 – Circuito do inversor trifásico com filtro e carga balanceada.................................................. 16
Figura 3-2 – Circuito simplificado do inversor trifásico com filtro e carga balanceada. ............................ 16
Figura 3-3 – Tensões e correntes para dimensionamento do filtro de saída do inversor. ........................... 23
Figura 3-4 – Representação da tensão VAB (t ) para o semiciclo positivo da moduladora. ........................ 24
Figura 3-5 – Diagrama de blocos do inversor trifásico de tensão em malha fechada. ................................ 32
Figura 3-6 – Circuito utilizado para o controle da tensão de saída do inversor. ......................................... 33
Figura 4-1 – Diagrama de Bode em dB do módulo da planta simplificada para o inversor monofásico de
tensão.......................................................................................................................................................... 38
Figura 4-2 – Diagrama de Bode da fase da planta simplificada para o inversor monofásico de tensão. .... 38
Figura 4-3 – Diagrama de Bode em dB do módulo do controlador utilizado para o inversor. ................... 42
Figura 4-4 – Diagrama de Bode da fase para o controlador utilizado para o inversor................................ 42
Figura 4-5 – Diagrama de Bode em dB do módulo da função transferência de laço aberto do inversor. ... 43
Figura 4-6 - – Diagrama de Bode da fase da função transferência de laço aberto do inversor. .................. 43
Figura 4-7 – Circuito de potência implementado para simulações. ............................................................ 44
Figura 4-8 – Implementação da transformação 0 para as tensões de linha e de referência................. 45
Figura 4-9 – Circuito de controle implementado para simulações. ............................................................ 45
Figura 4-10 – Circuito de comando dos interruptores. ............................................................................... 46
Figura 4-11 – Tensões de linha e correntes nos indutores. ......................................................................... 47
Figura 4-12 – Detalhe das tensões de linha no instante em que se conecta a carga.................................... 47
Figura 4-13 - Detalhe das tensões de linha no instante em que se desequilibra a fase 1. ........................... 48
Figura 4-14 – Tensões de fase para a transição de desequilíbrio de carga. ................................................ 48
Figura 4-15 – Tensões de referência e de linha nas coordenadas
0 . ................................................... 49
Figura 4-16 – Ação de controle VD 0 VD VD e sinais VD1 VD 2 VD 3 . ................................................. 50
Figura 4-17 – Detalhe da ação de controle no instante de desequilíbrio de carga. ..................................... 50
Figura 4-18 - Detalhe da ação de controle no instante de conexão da carga. ............................................. 50
Figura 4-19 – Tensão VAn e tensões VAB e V12 . ...................................................................................... 51
iv
Figura 4-20 – Detalhe da ondulação da corrente do indutor para a carga equilibrada. ............................... 51
v
Índice de Tabelas
Tabela 4-1 – Especificações para o projeto do inversor monofásico de tensão. ......................................... 34
Tabela 4-2 – Especificação dos elementos do circuito de potência. ........................................................... 36
Tabela 4-3 – Dimensionamento dos elementos do controlador. ................................................................. 41
vi
Simbologias e Abreviaturas
Símbolo
Descrição
Unidade
L
Indutor de Filtragem
H
C
Capacitor de Filtragem
F
R
Resistência de carga
Tensão de pico da portadora
Vtri pk
V
triangular
Vref pk
V
Tensão de pico da referência
Relação entre as tensões de
M
referência e da portadora
Relação entre os períodos de
N
referência e da portadora
Adimensional
Adimensional
fs
Freqüência de comutação
Hz
fr
Freqüência da moduladora
Hz
Ts
Período da tensão Vab
s
Vi
Tensão de entrada
V
V0 pk
Tensão de pico da saída
V
iL
Ondulação de corrente no
vL
Ondulação de tensão do
A
indutor de filtragem
V
capacitor de filtragem
Abreviatura
Significado
PWM
Pulse Width Modulation
vii
CAPÍTULO 1
Introdução Geral
Gleyson Luiz Piazza
CAPÍTULO 2
Inversor de Tensão Trifásico
2.1 IntroduçãoEquation Chapter 2 Section 2
O objetivo deste tópico é apresentar os conceitos básicos que estão envolvidos
na estrutura do inversor de tensão trifásico. A Figura 2-1 mostra um inversor de tensão
trifásico tipo 180 , alimentando uma carga trifásica balanceada conectada em estrela. A
estrutura possui três braços inversores em meia ponte, sendo que cada braço representa
uma fase do sistema. Entre dois interruptores de braços distintos há uma defasagem de
120 em relação aos pulsos de comando.
Figura 2-1 – Inversor de tensão trifásico tipo 180 alimentando carga trifásica resistiva conectada
em Y .
Como é de conhecimento, a corrente de linha circula por cada resistor da carga
trifásica, portanto a corrente de cada fase é igual à respectiva corrente de linha. Da
mesma forma, sabe-se que a tensão eficaz de linha é
3 maior que a tensão de fase.
O inversor é do tipo 180 , pois os interruptores de cada braço permanecem
habilitados durante 180 dos 360 correspondentes a um período completo de
comutação. Os interruptores de cada braço operam de forma complementar, para que
não ocorra curto circuito de braço.
Gleyson Luiz Piazza
Conceitos do Inversor de Tensão Trifásico
3
Será considerado que, S1 , S2 e S3 são os interruptores superiores chamados de
grupo positivo, enquanto que S4 , S5 e S6 são os interruptores inferiores, denominados
de grupo negativo. Como mostra a Figura 2-1, o braço A é constituído dos interruptores
S1 e S4 , o braço B formado por S2 e S5 e por fim, o braço C constituídos por S3 e
S6 .
A Figura 2-2 apresenta as tensões dos braços, as quais são obtidas tendo como
ponto de referência o ponto 0 , indicado na Figura 2-1. Também se observam as tensões
de linha VAB , VBC e VCA , além dos comandos dos interruptores.
Na Figura 2-3 estão representadas as tensões de braços e as tensões de fase que
são úteis para o equacionamento do inversor trifásico de tensão.
Observa-se que durante um período completo de funcionamento, o inversor de
tensão apresenta seis seqüências de operação. Em cada seqüência existem três
interruptores em condução, sendo que dois são do grupo positivo e um no grupo
inferior, ou de forma complementar. A duração de cada seqüência é de 60 . Assim os
comandos dos interruptores são defasados de 60 uns dos outros, para se obter as
tensões trifásicas balanceadas.
As tensões VA0 , VB 0 e VC 0 são formas de onda retangulares com metade da
amplitude da fonte contínua de entrada. Estas variáveis podem ser expressas pela série
de Fourier, como indicado em (2.1).
4 Vi
1
1
1
VA 0
sin t sin 3t sin 5t sin 7t ...
3
5
7
2
VB 0
4 Vi
2
VC 0
2
2 1
2 1
2 1
2
sin t
sin 3 t
sin 5 t
sin 7 t
...
3 3
3 5
3 7
3
(2.1)
4 Vi
2 1
2 1
2 1
2
sin t
sin 7 t
...
sin 3 t
sin 5 t
3
3
3
5
3
7
3
Através de (2.1), nota-se que as tensões VA0 , VB 0 e VC 0 são funções com
componentes de freqüência ímpares.
Sabe-se que:
VAB VA0 VB 0
VBC VB 0 VC 0
V V V
C0
A0
CA
(2.2)
Gleyson Luiz Piazza
Conceitos do Inversor de Tensão Trifásico
4
Figura 2-2 – Tensões de fase, linha e pulsos de comando para os interruptores do inversor trifásico.
Gleyson Luiz Piazza
Conceitos do Inversor de Tensão Trifásico
5
Figura 2-3 –. Tensões referenciais para o estudo do inversor trifásico.
Assim, substituindo (2.1) em (2.2) e fazendo as devidas manipulações
matemáticas, obtêm-se as tensões de linha em série de Fourier apresentadas em (2.3).
Gleyson Luiz Piazza
Conceitos do Inversor de Tensão Trifásico
1 4 Vi
n
cos
sin n(t )
VAB
6
6
n 1,5,7... n
1 4 Vi
n
cos
sin n(t )
VBC
6
2
n 1,5,7... n
1 4 Vi
n
5
cos
sin n(t )
VCA
6
6
n 1,5,7... n
6
(2.3)
Como mencionado anteriormente, as tensões de linha estão defasadas 30 das
tensões de fase, assim descrito em (2.3). Outro ponto de esclarecimento é o fato de que
as componentes de terceira ordem e os seus múltiplos são nulos. Estes harmônicos
presentes nas tensões VA0 , VB 0 e VC 0 quando subtraídos, a fim de se obter as tensões de
linha, se anulam, resultando na equação (2.3).
As correntes de linha são iguais as correntes de fase, uma vez que a conexão é
do tipo estrela. Desta forma, representam-se as correntes de linha como mostra (2.4)
1 4 Vi
n
cos
sin n(t )
i
AB
6
6
n 1,5,7... n R
1 4 Vi
n
cos
sin n(t )
i
BC
6
2
n 1,5,7... n R
1 4 Vi
n
5
cos
sin n(t )
iCA
6
6
n 1,5,7... n R
(2.4)
A análise do inversor trifásico alimentando uma carga resistiva pura é de
fundamental importância para esclarecer como estão dispostas as tensões de fase, linha
e as correntes. Com base nestas informações é possível estender e aprofundar o estudo
do inversor trifásico alimentando uma carga equilibrada, do tipo resistivo, com adição
de um filtro passivo LC , amontante à carga.
A inclusão do filtro de saída possibilita filtrar as componentes de freqüência
desejadas e desta forma, reduzir os efeitos provocados por harmônicos indesejáveis. Por
estes motivos, verifica-se a necessidade de manter em níveis aceitáveis, o conteúdo
harmônico presente na tensão alternada de saída. Estes harmônicos provocam perdas
que afetam consideravelmente a aplicação que a estrutura é destinada. A Figura 2-4
apresenta a nova estrutura do inversor trifásico, nota-se que não há conexão com o
neutro, ou seja, o sistema é a três fios.
Gleyson Luiz Piazza
Conceitos do Inversor de Tensão Trifásico
7
Figura 2-4 – Inversor trifásico alimentando uma carga resistiva com adição de um filtro de saída.
2.2 Modulação Senoidal
A modulação empregada neste trabalho é a do tipo senoidal, obtida através da
comparação de três moduladoras, definidas como tensões de referência, com uma
portadora triangular. As tensões de referência são defasadas 120 umas das outras de
forma a permitir tensões balanceadas nos terminais de carga do inversor.
Cada moduladora é comparada individualmente com a forma de onda triangular
e os sinais de tensão resultantes destas ações são aplicados nos interruptores do inversor
trifásico.
Sabe-se que a modulação senoidal aplicada a estruturas trifásicas geram sinais de
dois e três níveis. A modulação de dois níveis está presente nas tensões de braço
definidas por VAn , VBn e VCn , onde as tensões variam entre
Vi
V
e i . Já a modulação
2
2
três níveis apresenta uma diferença em relação à de dois níveis, porque os sinais podem
variar entre Vi , zero e Vi . No inversor trifásico este tipo de modulação pode ser
observado nas tensões de linha VAB , VBC e VCA .
Outro fator relevante nesta comparação se dá quanto aos pulsos da tensão Vab ,
que para três níveis é o dobro quando comparada à de dois níveis. Conclui-se, portanto,
que na modulação dois níveis a freqüência do sinal é igual à freqüência de comutação,
enquanto que na modulação três níveis é o dobro. O resultado destes pulsos na
modulação três níveis implica em harmônicos da tensão de saída duas vezes superior e
conseqüentemente, o projeto dos filtros de saída resultam em volume e peso menores.
É importante apresentar algumas relações matemáticas importantes quando se
trata da modulação do tipo senoidal. Na equação (2.5), a variável M refere-se à relação
Gleyson Luiz Piazza
Conceitos do Inversor de Tensão Trifásico
8
entre a tensão da moduladora, no caso a onda senoidal, e da tensão da portadora
triangular. Esta relação é importante, pois é a partir desta, que os pulsos de comando são
obtidos para o conversor.
Vref pk
M
(2.5)
Vtri pk
As equações (2.6) e (2.7) são relações entre períodos e freqüências da
moduladora e portadora, respectivamente. Onde, f r é a freqüência da moduladora,
enquanto que f s é a freqüência da portadora.
N
Ts
2 Tr
mf
(2.6)
fr
2 fs
(2.7)
Relacionando (2.6) e (2.7), chega-se a equação (2.8).
N
mf
(2.8)
2
A Figura 2-5 apresenta a modulação senoidal aplicada no inversor trifásico de
tensão. As tensões são geradas com o intuito de exemplificar o que fora descrito para o
caso de um inversor alimentando uma carga resistiva.
Figura 2-5 – Detalhe da modulação senoidal aplicada ao inversor de tensão trifásico.
Gleyson Luiz Piazza
Conceitos do Inversor de Tensão Trifásico
9
Observam-se nitidamente os efeitos causados pela modulação senoidal. Nota-se
que para a tensão VAn , a modulação presente é de dois níveis. Já para a tensão de linha
esta modulação é de três níveis.
2.3 Tensão de Braço e Função de Razão Cíclica
Este tópico apresenta uma breve análise da tensão do braço A , com o intuito de
esclarecer o comportamento e dependência da função de razão cíclica d A (t ) . Para
simplificação deste estudo, considera-se a representação da tensão VA (t ) , dada pela
Figura 2-6.
Figura 2-6 – Representação da tensão VA (t ) .
A partir da Figura 2-6, e considerando os intervalos de tempo mostrados na
figura, chega-se a equação (2.9) em um período completo de comutação.
t
t2
V
1 1 Vi
VA (t ) dt i dt
Ts 0 2
2
0
(2.9)
Onde:
t1 d A (t )
t2 1 d A (t )
(2.10)
Resolvendo a equação (2.9), considerando os intervalos de tempo de (2.10),
chega-se a expressão (2.11), que define a tensão do braço A . A mesma análise pode ser
aplicada para as tensões VB (t ) e VC (t ) .
VA (t ) Vi d A (t )
Vi
2
(2.11)
Gleyson Luiz Piazza
Conceitos do Inversor de Tensão Trifásico
10
O termo d A (t ) presente em (2.11), representa a função de razão cíclica para o
braço A . Assim como, d B (t ) e dC (t ) são as funções de razões cíclicas dos braços B e
C , respectivamente. Estas funções são variáveis originadas da modulação senoidal e
serão de grande utilidade no modelamento do inversor trifásico de tensão.
A Figura 2-7 apresenta o circuito do inversor trifásico considerando as tensões
de braços. Este circuito é uma forma simplificada de representar o inversor. É
importante esclarecer que como serão apresentadas nas equações de modelagem do
inversor, as tensões contínuas de VA (t ) , VB (t ) e VC (t ) se anulam quando se faz a
análise das malhas. Portanto, o circuito da Figura 2-7 pode ser representado apenas
pelas componentes alternadas.
Figura 2-7 – Circuito do inversor trifásico representado pelas tensões de braço.
2.4 Tensões de Referência
Ao iniciar o estudo do inversor trifásico é necessário esclarecer que o sistema é a
três fios, portanto, sem conexão com o neutro. Como pode ser analisado no circuito da
Figura 2-8 há três pontos de referência definidos por n , g1 e g 2 , enquanto que as
tensões de braço do inversor trifásico são definidas por v A (t ) , vB (t ) e vC (t ) ,
respectivamente. Para determinar as tensões vg1n e vg2 n serão consideradas duas cargas
resistivas conectadas em estrela definidas pelos resistores R1 e R2 . Através das
equações de malha do circuito da Figura 2-8 determina-se as tensões vg1n e vg2n e
comprovar-se-á que estas são iguais para um sistema operando em equilíbrio.
Gleyson Luiz Piazza
Conceitos do Inversor de Tensão Trifásico
11
Figura 2-8 – Circuito para análise das tensões de referência.
Sabe-se que:
iA1 (t ) iB1 (t ) iC1 (t ) 0
iA2 (t ) iB2 (t ) iC2 (t ) 0
(2.12)
Analisando as malhas da carga definidas na Figura 2-8 pelo resistor R1 , tem-se a
equação (2.13).
v A (t ) R1 iA1 (t ) vg1n 0
vB (t ) R1 iB1 (t ) vg1n 0
vC (t ) R1 iC1 (t ) vg1n 0
(2.13)
A mesma análise determinada pela equação (2.14) é estendida para a carga
definida pelo resistor R2 .
v A (t ) R2 iA2 (t ) vg2 n 0
vB (t ) R2 iB2 (t ) vg2 n 0
vC (t ) R2 iC2 (t ) vg2 n 0
(2.14)
Somando as expressões de (2.13), obtém-se (2.15).
v A (t ) vB (t ) vC (t ) R1 iA1 (t ) iB1 (t ) iC1 (t ) 3 vg1n 0
(2.15)
Somando as expressões de (2.14), tem-se (2.16).
v A (t ) vB (t ) vC (t ) R2 iA2 (t ) iB2 (t ) iC2 (t ) 3 vg2 n 0
(2.16)
Gleyson Luiz Piazza
Conceitos do Inversor de Tensão Trifásico
12
Aplicando (2.12) em (2.15) e (2.16), obtém-se (2.17).
1
vg1n 3 v A (t ) vB (t ) vC (t )
v 1 v (t ) v (t ) v (t )
B
C
g2 n 3 A
(2.17)`
Como podem ser observadas, para um sistema em equilibrio as tensões vg1n e
vg2n são iguais, o que permite equacionar o inversor trifásico com filtro e carga
balanceada considerando os pontos g1 e g 2 na mesma referência.
2.5 Carga Não-Linear
Este trabalho apresenta o estudo para o caso de uma carga do tipo não-linear
conectada ao inversor trifásico. A Figura 2-9 representa o circuito do inversor e da carga
não-linear.
Figura 2-9 – Inversor trifásico alimentando uma carga não-linear.
Para simplificação dos estudos que serão realizados no decorrer deste trabalho é
necessário considerar que as tensões v1 (t ) , v2 (t ) e v3 (t ) , obtidas na saída do inversor
são formas de onda senoidais sem a componente de alta freqüência. Representa-se
então, o circuito simplificado através da Figura 2-13 com a inclusão de indutores na
entrada do retificador trifásico, denominados por L01 , L02 e L03 , utilizados para atenuar
os efeitos causados pela derivada de carga do retificador com filtro capacitivo.
É importante esclarecer que cargas não-lineares se caracterizam por apresentar
uma relação não-linear entre a tensão aplicada nos seus terminais e a corrente por elas
drenada. Este trabalho abordará apenas o retificador com filtro capacitivo. A escolha
desta topologia é justificada pelo fato de que este tipo de carga é muito comum e
representa um caso crítico para o controle do inversor de tensão.
Gleyson Luiz Piazza
Conceitos do Inversor de Tensão Trifásico
13
A acentuada derivada de corrente provocada pela não-linearidade da carga se
torna evidente nas variáveis de controle do inversor trifásico. Por este motivo o projeto
de controle deverá ser efetivo quando o sistema for submetido a cargas com
características não-lineares.
Para melhor exemplificar este caso se apresenta o circuito da Figura 2-10,
representando apenas um retificador trifásico alimentando uma carga com filtro
capacitivo.
Figura 2-10 – Retificador trifásico com filtro capacitivo.
Através da Figura 2-11 se observam as tensões de linha e a tensão de saída
obtida sobre o capacitor de saída do retificador. O retificador trifásico apresenta seis
etapas de operação em um período completo das tensões de alimentação.
Figura 2-11 – Tensões de entrada e tensão de saída do retifcador com filtro capacitivo.
Considerando que o capacitor de saída esteja carregado, no momento em que a
tensão da fase 1 for maior que a tensão de saída, os diodos D1 e D5 passam a conduzir
até o momento em que a tensão do capacitor for maior que as tensões aplicadas nos
Gleyson Luiz Piazza
Conceitos do Inversor de Tensão Trifásico
14
diodos D1 e D5 . Neste instante o capacitor passa a fornecer energia para o resistor de
saída. As outras etapas de operação se dão através dos diodos D2 e D6 e D3 e D4 ,
representando meio período em relação a freqüência das tensões de alimentação.
A Figura 2-12 representa a tensão e a corrente em uma das fases do retificador.
Nota-se que devido a característica da carga, a corrente de fase apresenta uma elevada
derivada, o que pode ser atenuado com a inclusão de indutores na entrada do retificador,
como mostra o circuito da Figura 2-13.
Figura 2-12 – Tensão e corrente na fase 1 para o retificador trifásico com filtro capacitivo.
Figura 2-13 – Circuito simplificado da carga não-linear com a inclusão dos indutores de entrada.
Simulando o circuito da Figura 2-13 apresentam-se na Figura 2-14 as formas
deonda das tensões de linha e da tensão de saída do retificador trifásico. Já a Figura
2-15 representa a tensão e a corrente em uma das fases do retificador, observa-se que o
efeito da derivada de corrente sofreu uma atenuação quando comparadop com a corrente
de fase apresenta na Figura 2-12. Este efeito se deve fundamentalmente pela inclusão
dos indutores de entrada que apresentam a diferença de tensão entre a tensõa de entrada
Gleyson Luiz Piazza
Conceitos do Inversor de Tensão Trifásico
15
e tensão de saída. Conseqüentemente, a corrente que circula no indutor leva em
consideração esta queda de tensão que por sua vez, se torna menos expressiva quando o
retificador não apresenta os indutores de entrada.
Figura 2-14 – Tensões de linha e tensão de saída para o retificador trifásico com inculsão dos
indutores de entrada..
Figura 2-15 – Tensão de linha e corrente na fase 1 para o retificador trifásico com inculsão dos
indutores de entrada..
O dimensionsmento dos indutortes de entrada, bem como do capacitor e resistor
de saída serão abordados no terceiro capítulo. Onde a partir do dimensionamneto do
inversor trifásico, do sistema de controle das tensões de linha será possível elaborar uma
metologia de projeto para a carga não-linear.
Gleyson Luiz Piazza
CAPÍTULO 3
Modelo Matemático do Inversor Trifásico Utilizando
Transformada de Clarke
3.1 IntroduçãoEquation Chapter 3 Section 3
A Figura 3-2 apresenta o circuito para determinação das equações diferencias
para o inversor trifásico. Como demonstrado anteriormente, para um sistema em
equilíbrio g1 e g 2 são iguais.
Figura 3-1 – Circuito do inversor trifásico com filtro e carga balanceada.
Figura 3-2 – Circuito simplificado do inversor trifásico com filtro e carga balanceada.
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
17
Para o equacionamento do inversor considera-se que o tipo de carga conectada
seja resistiva pura, embora o modelamento seja realizado com o inversor operando a
vazio. Este tipo de operação caracteriza o caso mais crítico para o sistema de
compensação.
Sabe-se que:
v A (t ) Vi d A (t )
vB (t ) Vi d B (t )
v (t ) V d (t )
i
C
C
(3.1)
A equação (3.1) representa as tensões de braço sem considerar a componente
contínua, uma vez que, na análise das malhas, estas componentes se anulam.
3.2 Equações Diferenciais do Inversor Trifásico
Para determinar as equações diferenciais do inversor trifásico utilizam-se três
malhas definidas a seguir.
Malha 1:
A equação da primeira malha é determinada pela equação (3.2).
v A (t ) vL1 (t ) v1g1 (t ) v2 g1 (t ) vL2 (t ) vB (t )
(3.2)
Mas,
v1g1 (t ) v2 g1 (t ) v1 (t ) vg1 (t ) v2 (t ) vg1 (t )
v1g1 (t ) v2 g1 (t ) v1 (t ) v2 (t )
(3.3)
Reescrevendo (3.2) considerando (3.3), obtém-se (3.4).
vA (t ) vB (t ) vL (t ) vL (t ) v1 (t ) v2 (t )
1
2
(3.4)
Malha 2:
A segunda malha é definida por (3.5).
vB (t ) vL2 (t ) v2 g1 (t ) v3 g1 (t ) vL3 (t ) vC (t )
(3.5)
A equação (3.5) é reescrita pela expressão (3.6).
vB (t ) vC (t ) vL (t ) vL (t ) v2 (t ) v3 (t )
2
3
(3.6)
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
18
Malha 3:
A terceira malha é dada pela equação
vC (t ) vL3 (t ) v3 g1 (t ) v1g1 (t ) vL1 (t ) v A (t )
(3.7)
Reagrupando a expressão (3.7), obtém-se (3.8).
vC (t ) vA (t ) vL (t ) vL (t ) v3 (t ) v1 (t )
3
(3.8)
1
3.2.1 Tensões dos Indutores
Sabendo que:
iL1 (t ) iC1 (t ) iR1 (t )
iL2 (t ) iC2 (t ) iR2 (t )
iL3 (t ) iC3 (t ) iR3 (t )
(3.9)
Desta forma, a diferença entre as tensões do indutor L1 e L2 é dada pela equação
(3.10). A análise da diferença das tensões de L1 e L2 é estendida para as tensões de L2
e L3 e L3 e L1 .
vL1 (t ) vL2 (t ) L1
diL1 (t )
dt
L2
diL2 (t )
dt
(3.10)
É importante ressaltar, que para o estudo do inversor trifásico a três fios,
considera-se para simplificação das análises matemáticas a condição dada por (3.11).
L1 L2 L3 L
C1 C2 C3 C
(3.11)
R1 R2 R3 R
Levando em consideração (3.11) e aplicando em (3.10), chega-se em (3.12).
vL1 (t ) vL2 (t ) vL12 (t ) L
d
iL (t ) iL2 (t )
dt 1
(3.12)
Substituindo as correntes dos indutores L1 e L2 na equação (3.12), obtém-se
(3.13).
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
vL12 (t ) L
d
iC (t ) iC2 (t ) iR1 (t ) iR2 (t )
dt 1
19
(3.13)
Onde:
d
iC1 (t ) C1 dt v1 (t )
i (t ) C d v (t )
2
2
C2
dt
(3.14)
E,
v1 (t )
iR1 (t ) R
1
i (t ) v2 (t )
R2
R2
(3.15)
Assim, reescrevendo a equação (3.13), obtém-se (3.16).
vL12 (t ) L
d d
d
v1 (t ) v2 (t )
C v1 (t ) C v2 (t )
dt dt
dt
R
R
(3.16)
Manipulando a equação (3.16), chega-se em (3.17).
vL12 (t ) L C
d2
L d
v (t ) v12 (t )
2 12
dt
R dt
(3.17)
Portanto, as variáveis vL23 (t ) e vL31 (t ) são definidas por (3.18) e (3.19),
respectivamente.
d2
L d
v (t ) v23 (t )
2 23
dt
R dt
(3.18)
d2
L d
vL31 (t ) L C 2 v31 (t ) v31 (t )
dt
R dt
(3.19)
vL23 (t ) L C
3.3 Transformada 0
Para realizar o modelamento do inversor trifásico de tensão consideram-se que
as variáveis de monitoração serão as tensões de linha com o sistema operando a vazio.
A partir da determinação das tensões dos indutores, expressam-se as equações
(3.4), (3.6) e (3.8) através de (3.20).
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
d2
L d
v AB (t ) L C dt 2 v12 (t ) R dt v12 (t ) v12 (t )
d2
L d
vBC (t ) L C 2 v23 (t ) v23 (t ) v23 (t )
dt
R dt
2
d
L d
vCA (t ) L C 2 v31 (t ) v31 (t ) v31 (t )
dt
R dt
20
(3.20)
Onde:
v AB (t ) Vi d AB (t )
vBC (t ) Vi d BC (t )
v (t ) V d (t )
i
CA
CA
(3.21)
Representa-se (3.21) na forma matricial através de (3.22) e (3.23)
d AB (t )
1 0 0 v12 (t )
1 0 0 v12 (t ) 1 0 0 v12 (t )
d2
L d
Vi d BC (t ) L C 2 0 1 0 v23 (t ) 0 1 0 v23 (t ) 0 1 0 v23 (t ) (3.22)
dt
R
dt
0 0 1 v (t )
0 0 1 v (t ) 0 0 1 v (t )
d (t )
31
31
31
CA
Vi d ABC
d2
L d
L C 2 v 123 v 123 v 123
dt
R dt
(3.23)
Da definição da transformada 0 , sabe-se que:
X 0 A X 123
1
(3.24)
E,
X 123 A X 0
1
(3.25)
Onde a matriz de transformação está apresentada em (3.26).
1
2
1
A 1
0
1
1
3
2
1
2
3
2
1
2
2
2
(3.26)
E,
A A
1 T
(3.27)
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
21
Aplicando a condição (3.25) em (3.23), resulta na expressão (3.28).
Vi A d 0
d2
L d
L C 2 A v 0 A v 0 A v 0
dt
R dt
(3.28)
Mas,
d
d
d
dt A v 0 A dt v 0 v 0 dt A
2
d2
d2
d A v
A
v
v
A
0
0
dt 2
dt 2 0
dt 2
(3.29)
Como os termos da matriz da transformada de Clarke são constantes, conclui-se
que a derivada desta matriz é nula, portanto, reescreve-se (3.29), resultando na
expressão (3.30).
d
d
dt A v 0 A dt v 0
2
d2
d A v
A
v
0
dt 2
dt 2 0
(3.30)
Substituindo (3.30) em (3.28), tem-se (3.31).
Vi A d 0 L C A
d2
L
d
v
A v 0 A v 0
2 0
dt
R
dt
(3.31)
Multiplicando ambos os termos da equação (3.31) por A , obtém se (3.33).
1
Vi A A d 0 L C A A
1
1
d2
L
d
1
1
v
A A v 0 A A v 0
2 0
dt
R
dt
(3.32)
Mas,
A A I
1
(3.33)
Então,
Vi d 0 L C
d2
L d
v
v 0 v 0
2 0
dt
R dt
(3.34)
Onde:
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
d A1 d
123
0
1
v 0 A v 123
22
(3.35)
Aplicando a transformada de Laplace na equação (3.34), chega-se em (3.36).
Vi d 0 s 2 L C v 0 s
v 0
L d
v v 0
R dt 0
(3.36)
Vi d 0
(3.37)
L
2
s L C s 1
R
Considerando a expressão (3.38), o resultado de (3.37) pode ser reescrito por
(3.39).
Z ( s)
1
(3.38)
L
2
s L C s 1
R
Então,
v 0
Vi Z ( s ) d 0
(3.39)
Representando as tensões de seqüência zero, alfa e beta por (3.40).
v0 Vi Z ( s ) d 0
v Vi Z ( s ) d
v V Z ( s ) d
i
(3.40)
A equação (3.40) representa o desacoplamento das variáveis do sistema. Assim,
as componentes das tensões de linha podem ser representadas através das coordenadas
0 , permitindo elaborar um controle do inversor a partir destas condições.
3.4 Projeto do Filtro LC de Saída
O projeto do filtro deve levar em conta a máxima ondulação de corrente para o
indutor e de tensão para o capacitor. A Figura 3-3 apresenta de forma simplificada a
tensão no indutor, a ondulação de corrente em L e a ondulação de tensão no capacitor
C . O filtro de saída permite reduzir os harmônicos causados pela comutação dos
interruptores que reduz substancialmente o rendimento da estrutura. Com a
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
23
implementação do filtro LC , as tensão aplicadas na carga do inversor, apresentam a
componente fundamental das tensões de referência.
Como será demonstrado no projeto do filtro, considera-se para o
dimensionamento o dobro da freqüência de comutação, pois através das equações
diferencias, nota-se que as expressões fazem referência às variáveis de linha. Portanto,
como abordado anteriormente, as componentes de linha apresentam o dobro da
freqüência de comutação, o que será determinante no projeto do filtro LC .
Figura 3-3 – Tensões e correntes para dimensionamento do filtro de saída do inversor.
3.4.1 Cálculo do Indutor de Filtragem
Sabe-se que:
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
Ts
Ts
2
24
(3.41)
Retomando a equação diferencial definida por (3.42)
v A (t ) vL1 (t ) vL2 (t ) v1g1 (t ) v2 g1 (t ) vB (t )
(3.42)
Reescrevendo(3.42), tem-se (3.43).
v A (t ) vB (t ) vL (t ) vL (t ) v1 (t ) vg (t ) v2 (t ) vg (t )
1
2
1
1
v AB (t ) vL12 (t ) v12 (t )
(3.43)
A equação (3.43) apresenta a tensão v AB (t ) , a qual representa a tensão de linha
com uma freqüência duas vezes maior que a de comutação. A Figura 3-4 representa de
forma simplificada a tensão v AB (t ) durante um determinado intervalo de tempo
considerando o semiciclo positivo da componente fundamental.
Figura 3-4 – Representação da tensão VAB (t ) para o semiciclo positivo da moduladora.
Sabe-se que:
vL L
diL
dt
(3.44)
A equação (3.45) representa a tensão do indutor durante o intervalo de tempo t1 ,
enquanto que no intervalo de tempo t2 a tensão no indutor é definida por (3.46).
L
diL12 (t )
dt
Vi V0 pk sin(r t )
(3.45)
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
L
diL12 (t )
dt
V0 pk sin(r t )
25
(3.46)
Reescrevendo (3.45) e (3.46), obtém-se (3.47).
iL12 (t )
Vi V0 pk sin(r t )
L
t1
L iL12 (t ) V sin( t )
r
0 pk
t2
(3.47)
Logo, os intervalos de tempo t1 e t2 são dados respectivamente por (3.48) e
(3.49).
t1
L iL12 (t )
(3.48)
Vi V0 pk sin(r t )
t2
L iL12 (t )
(3.49)
V0 pk sin(r t )
Sabe-se que:
Ts t1 t2
(3.50)
Portanto, substituindo (3.48) e (3.49) em (3.50) e considerando que Ts é a
metade do período de comutação, chega-se na equação (3.51).
L iL12 (t )
L iL12 (t )
Ts
2 Vi V0 pk sin(r t ) V0 pk sin(r t )
(3.51)
Desenvolvendo a equação (3.51) e isolando a ondulação de corrente do indutor,
obtém–se (3.52).
iL12 (t )
Vi V0 pk sin(r t ) V0 pk 2 sin 2 (r t )
(3.52)
2 f s L Vi
A equação (3.52) é parametrizada conforme apresentado em (3.53).
iL f (t )
2 L iL f (t )
Ts Vi
V0 pk
V0 pk sin 2 (r t )
sin(r t )
Vi
Vi
(3.53)
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
26
A máxima ondulação pode ser obtida derivando-se a equação (3.53) e igualando
a zero, como mostra (3.54).
d iL12
dt
cos(r t )
2 V0 pk sin(r t ) cos(r t )
Vi
0
(3.54)
De (3.54) resulta nas seguintes soluções apresentadas em (3.55).
d iL12
dt
Vi
1
4 ;V0 pk 2
V
V
0 pk 1 0 pk
Vi
Vi
(3.55)
Vi
; V0 pk
2
O que implica na ondulação de corrente do indutor definida em (3.56).
iL12
Vi
Vi
8 f L ; V0 pk 2
s
V
V
0 pk 1 0 pk ; V Vi
0 pk
2 fs L
Vi
2
(3.56)
Da mesma forma, pode-se evidenciar (3.56) em termos da indutância L f .
Vi
8 f i
s
L12
L
V0 pk
2 f s iL12
; V0 pk
V0
1 pk
Vi
Vi
2
Vi
; V0 pk
2
(3.57)
3.4.2 Cálculo do Capacitor de Filtragem
A capacitância do filtro de saída é determinada em função da máxima ondulação
de tensão, que por sua vez, está diretamente ligada à máxima ondulação da corrente do
indutor L . Estas ondulações de tensão e de corrente estão apresentadas na Figura 3-3.
Assume-se que toda componente alternada de alta freqüência circule através do
capacitor C , pode-se então calcular a ondulação de tensão do capacitor considerando a
variação de carga do mesmo, como mostra (3.58).
q C vC
(3.58)
Mas,
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
1
q i t
2
27
(3.59)
Assim, tem-se (3.60).
1 i T
q L s
2 2 2
(3.60)
Substituindo (3.60) em (3.58), obtém-se (3.61).
1 iL12
C vC
8 f s
(3.61)
Considera-se que a máxima ondulação da tensão do capacitor do filtro é
calculada em relação da máxima ondulação de corrente do indutor, como descrito
anteriormente. Assim, substituindo iL f em (3.61) obtém-se (3.62).
Vi
Vi
1
128 f 2 L C ; V0 pk 2
s
vC
V0 pk V0 pk
V
1
1
; V0 pk i
16 f s 2 L C
2
Vi
(3.62)
Reescrevendo (3.62) chega-se em (3.63).
Vi
Vi
1
128 f 2 L v ; V0 pk 2
s
C
C
V0 pk
V0 pk
V
1
1
; V0 pk i
2
16 f s L vC
2
Vi
(3.63)
3.5 Cálculo do Indutor e do Capacitor para Carga Não-Linear
Analisando a malha no momento em que os diodos D1 e D5 conduzem, obtémse a equação (3.64).
v1 (t ) v2 (t ) vL01 (t ) vL02 (t ) V0
(3.64)
Mas,
v1 (t ) v2 (t ) v12 (t )
(3.65)
Logo,
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
v12 (t ) vL012 (t ) V0
28
(3.66)
Onde,
vL012 (t ) vL01 (t ) vL02 (t )
vL012 (t ) L01
diL01 (t )
dt
L02
diL02 (t )
(3.67)
dt
Sabe-se que a corrente que circula pela fase 1 é a mesma que circula através da
fase 2. Considerando que todos os elementos indutivos da entrada do retificador
trifásico sejam iguais, obtém a expressão .
iL02 (t ) iL01 (t )
(3.68)
L0 L01 L02 L03
(3.69)
vL012 (t ) 2 L0
diL01 (t )
dt
(3.70)
Substituíndo (3.70) em (3.66), têm-se
v12 (t ) 2 L0
diL01 (t )
dt
V0
(3.71)
Desta forma, isolando a derivada do inductor, obtém-se
diL01 (t )
dt
1
v12 (t ) V0
2 L0
(3.72)
Através da Figura 3-5 se observa que a tensão de saída é aproximada por uma
fonte contínua de tensão. No instante em que a tensão de linha for igual a tensão de
saída do retificador os diodos passam a conduzir, este instante define o ângulo de
condução 1 , como indicado na Figura 3-5.
V0
V pk
1 sin 1
(3.73)
Para simplificar a análise matemática, faz-se uma mudança de eixos da tensão
para corrente de carga. Desta forma, reescreve-se a e equação da derivada através de
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
diL01 (t ' )
dt
1
V pk sin wr t ' 1 V0
2 L0
29
(3.74)
Definindo que a relação entre a tensão contínua de saída e a tensão de pico na
saída do retificador é dada por
k
V0
V pk
(3.75)
Assim, reescreve-se (3.75)
diL01 (t ' )
dt
V pk
2 L0
sin wr t ' 1 k
(3.76)
Sabe-se que:
sin wr t ' 1 sin wr t ' cos 1 sin 1 cos wr t '
(3.77)
Onde, as expressões trigonométricas são definidas em (3.78).
sin 1 k
2
cos 1 1 k
(3.78)
Substituindo (3.78) em (3.76), obtém-se
diL01 (t ' )
dt
1 k 2 sin wr t ' k cos wr t ' k
2 L0
V pk
(3.79)
Integrando a equação (3.79) determina-se a equação que representa a corrente de
carga dos indutores de entrada do retificador trifásico.
iL01 (t ' )
1 k 2
1 cos wr t ' k sin wr t ' wr t '
2 L0 wr wr
V pk
(3.80)
A partir da expressão (3.80), pode-se obter a indutância de entrada do
retificador. Para tanto, é necessário especificar a corrente eficaz e o fator de crista,
dados estes, que são fornecidos em projeto. O fator de crista é a relação entre a corrente
de pico e a corrente de eficaz de carga. Portanto, utilizando estas considerações, obtémse a equação (3.81).
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
L0
1 k 2
1 cos wr t ' k sin wr t ' wr t '
2 Fc wr wr
V pk
30
(3.81)
Onde Fc é o fator de crista definindo a relação (3.82).
Fc
iL0 pk
(3.82)
iL0 efz
No entanto, para obter a indutância de entrada do retificador é necessário
considerar o ponto máximo de corrente de carga. Através da Figura 3-5 se observa que
este instante é determinado por t 1 .
Porém, vale ressaltar que os eixos são definidos por (3.83).
t t ' 1
(3.83)
Assim, considerando a condição de máxima corrente, tem-se (3.84), que
representa o instante em questão para o eixo t ' .
t ' 2 1
(3.84)
Substituíndo (3.84) em (3.81), tem-se (3.85).
L0
1 k 2
1 cos 1 k sin 1 1
2 Fc wr wr
V pk
(3.85)
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
31
Figura 3-5 – Tensão na saída do inversor, corrente de carga e derivadas de carga e do indutor de
filtragem.
3.6 Controle das Tensões de Linha Utilizando Transformada de Clarke
A proposta deste capítulo visa aprimorar os conceitos a respeito do modelo
matemático do inversor implementado para o projeto do compensador através da
transformação 0 . A Figura 3-6 apresenta o diagrama de blocos para o inversor
trifásico de tensão em malha fechada.
As variáveis de controle do inversor serão as tensões de linha, uma vez que não
há neutro conectado à carga. O sistema de controle do inversor monitora as tensões de
linha ao longo do tempo. Estas tensões serão transformadas em 0 , gerando as
tensões V0 , V e V . A partir das referências das tensões de linha em 0 obtém-se as
tensões de erro como pode ser observado na Figura 3-6.
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
32
Figura 3-6 – Diagrama de blocos do inversor trifásico de tensão em malha fechada.
As tensões de erro são aplicadas nos compensadores de tensão definido na
Figura 3-6 por Cv ( s ) . É importante ressaltar que serão implementados três
compensadores de tensão para as coordenadas 0 . Os sinais de controle agora
definidos pelas variáveis Dc 0 , Dc e Dc , são aplicados no bloco 0 1 , responsável
pela transformada inversa gerando D1 , D2 e D3 .
O resultado desta transformação é comparado com a portadora triangular, que
por sua vez definem os pulsos para os braços A , B e C . Os interruptores superiores
S1 , S2 e S3 são comutados através dos pulsos D1 , D2 e D3 , respectivamente.
Enquanto os interruptores inferiores S4 , S5 e S6 são comutados pelos sinais
complementares de D1 , D2 e D3 , respectivamente.
3.6.1 Controlador Proposto
Obtida a função de transferência do inversor trifásico de tensão, propõem-se a
implementação de um controle de tensão com o objetivo de atender especificações de
projeto que visam preservar a tensão de saída independente de qualquer variação de
carga ou perturbação que possa de alguma forma se manifestar.
O circuito proposto para o controle é muito parecido com o proporcional integral
derivativo, PID , como pode ser observado na Figura 3-7. Este controle adiciona ao
sistema dois zeros, um pólo na origem e um pólo deslocado em altas freqüências.
Gleyson Luiz Piazza
Modelo Matemático do Inversor Trifásico Utilizando Transformada de Clarke
33
Figura 3-7 – Circuito utilizado para o controle da tensão de saída do inversor.
Através do circuito da Figura 3-7 determina-se a função transferência do
controlador Cv ( s ) apresentada na equação (3.86).
Cv ( s )
sC
fz
R fz 1 sCi Riz 1
sC fz sCi Rip R fz Rip R fz
(3.86)
A qual pode ser reescrita por (3.87).
Cv ( s ) kv
s z1 s z2
s s p1
(3.87)
Onde, o ganho do compensador é dado pela equação (3.88).
kv
R fz
(3.88)
Rip
As freqüências dos dois zeros são determinadas pelas equações (3.89) e (3.90).
f z1
1
2 C fz R fz
(3.89)
f z2
1
2 Ci Riz
(3.90)
O controlador apresenta ainda dois pólos um fixado na origem e outro alocado
conforme a relação (3.91).
f p1
Rip Riz
2 Ci Rip Riz
(3.91)
Gleyson Luiz Piazza
CAPÍTULO 4
Exemplo de Projeto e Simulações
4.1 Introdução
Este capítulo apresenta uma metodologia de projeto do circuito de
potência e dos compensadores de tensão tendo como parâmetros os dados fornecidos na
Tabela 4-1. Os resultados de simulação serão obtidos através da especificação do filtro
trifásico, carga e compensador. Equation Chapter 4 Section 4
Tabela 4-1 – Especificações para o projeto do inversor monofásico de tensão.
Grandeza
Valor Nominal
Tensão de alimentação
700V
Tensão eficaz de fase do inversor
220 V
Potência de saída do inversor
12 kW
Freqüência de saída
60 Hz z
Freqüência de comutação
20 kHz
Ondulação da corrente do indutor
30%
Ondulação da tensão do capacitor
1%
Tensão de pico da moduladora
5,38V
Tensão de saída do retificador com
520V
filtro capacitivo
Fator de crista
2
4.2 Cálculo do Circuito de Potência
A partir das especificações da Tabela 4-1 inicia-se o dimensionamento dos
resistores de carga, indutor e capacitor de filtragem.
2
P0 V0efz
3
R
(4.1)
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
35
Por meio de (4.1), obtém-se a resistência de carga R para cada fase do inversor.
R 12,1
(4.2)
A partir da ca expressão (4.3) é da definição da corrente de saída do inversor
para o caso deste alimentar uma carga resistiva.
I 0efz
V0efz
R
(4.3)
Encontrando a corrente de pico do indutor, obtida em (4.4), para o caso em que o
inversor alimentar uma carga puramente resistiva.
I 0efz 15,15 A
(4.4)
As equações (4.5) e (4.6) representam as ondulações da corrente do indutor de
filtragem e da tensão do capacitor de filtragem, respectivamente.
iL 0,30 I 0 pk
iL 7, 7 A
vC 0, 01 V0 pk
vC 3,11V
(4.5)
(4.6)
Onde,
I 0 pk 2 I 0efz
V0 pk 2 V0efz
(4.7)
Com isso, utilizando a máxima ondulação da corrente no indutor obtém-se a
equação (4.9).
L
Vi
8 f s iL
L 0,5672 mH
(4.8)
(4.9)
Da mesma forma, se expressa o valor do capacitor de filtragem do inversor
através de (4.11).
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
C
36
V
1
2 i
128 f s L VC
(4.10)
C 7, 748 F
(4.11)
Para uma representação mais realista, os valores utilizados de indutância e
capacitância para a simulação estão apresentado em
L 0,5mH
(4.12)
C 12 F
A freqüência de ressonância fica definida por (4.14).
f0
1
2 L C
(4.13)
f 0 2, 055 kHz
(4.14)
Desta forma, a Tabela 4-2 apresenta o dimensionamento dos elementos do
circuito de potência do inversor trifásico de tensão.
Tabela 4-2 – Especificação dos elementos do circuito de potência.
Grandeza
Valor Nominal
Indutor de filtragem
0,5 mH
Capacitor de filtragem
12 F
Resistência de carga
12,1
Freqüência de ressonância
2, 055kHz
4.3 Cálculo do Índice de Modulação
Sabendo a tensão de entrada e a tensão máxima de saída, obtém-se o índice de
modulação do sistema, definido em (4.16).
M
3 V0 pk
Vi
M 0, 775
(4.15)
(4.16)
Desta forma, com o valor especificado para a máxima tensão de referência
aplicado no sistema em malha fechada, obtém-se a tensão de pico da portadora
triangular como mostra a equação (4.18).
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
Vtri pk
Vref pk
M
Vtri pk 6,98V
37
(4.17)
(4.18)
Portanto, fixa-se a amplitude da onda portadora definida em (4.18) na freqüência
de comutação. Esta portatora será comparada com os sinais de controle do inversor, que
por sua vez definirão os pulsos de comando dos interruptores.
4.4 Função de Transferência do Inversor
A função de transferência do inversor é gerada para o caso mais crítico ao qual o
sistema possa ser submetido, ou seja, inversor operando a vazio. O ganho do sensor
representado por K s define a relação entre a tensão de referência e a tensão de saída do
filtro, como apresenta (4.19).
Ks
Vref
3 V0 pk
(4.19)
Através das especificações da Tabela 4-1, apresentam-se na Figura 4-1 e na
Figura 4-2, os diagramas de Bode de módulo (em dB) e fase da função de transferência
do inversor. Verifica-se no diagrama de módulo o efeito provocado pelo duplo pólo
presente na planta do inversor. Este duplo pólo situa-se exatamente na freqüência de
ressonância do filtro de saída.
É com base nestes gráficos da Figura 4-1 e da Figura 4-2 que se projeta o
controlador descrito no capítulo anterior. Será necessário suavizar este duplo pólo e
garantir que o sistema em malha fechada possa atender os critérios de margem de fase e
do ganho na freqüência de cruzamento. Desta forma, os zeros do controlador serão
responsáveis para atenuar o duplo pólo, já o pólo na origem garante erro nulo em
regime, enquanto que o segundo pólo é deslocado para a alta freqüência de forma a
eliminar os efeitos provocados pela comutação ou qualquer interferência em alta
freqüência.
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
38
Figura 4-1 – Diagrama de Bode em dB do módulo da planta simplificada para o inversor
monofásico de tensão.
Figura 4-2 – Diagrama de Bode da fase da planta simplificada para o inversor monofásico de
tensão.
Antes de iniciar o projeto do controlador especifica-se que a freqüência de
cruzamento desejada seja definida pela equação (4.20).
fs
fc
5
f c 4 kHz
(4.20)
Os diagramas de Bode trazem informações valiosas para projetar um controlador
adequado ao sistema. Através do diagrama de módulo defini-se que o ganho na
freqüência de cruzamento é definido por (4.21).
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
k1 8,912 dB
39
(4.21)
Enquanto que a margem de fase na freqüência de cruzamento é dada por (4.22).
MF 180
(4.22)
4.5 Função Transferência do Controlador de Tensão
Com base no que foi descrito no tópico anterior propõem-se que os dois zeros
sejam alocados próximos da freqüência de ressonância, como definido na equação
(4.23), optou-se por fixar estes zeros em 0, 6 de f 0 .
1
f z1 f z2 0, 6 f 0
2 L C
f z f z 1, 233 kHz
2
1
(4.23)
Sabe-se também que a partir da margem de fase desejada e a margem de fase
encontradfa pára a freqüência de corete desejada, encontra-se o ângulo necessário para a
compensação do sistema. Como os dois zeros do compensador são definidos por (4.23)
e há um pólo na origem, pode-se facilmente definir o quanto de fase o segundo pólo
deverá contribuir.
A margem de fase desejada está definida em (4.24) e o ângulo do compensador é
dado por (4.25).
MFdes 45
comp MFdes MFf
comp 45
(4.24)
c
(4.25)
Onde a a margem de fase na freqüência desejada é determinada através da
equação (4.26).
MFfc 180 MF
(4.26)
A expressão (4.27) representa o ângulo necessário para o segundo pólo, este
ângulo é obtido da diferença entre as fases dos zeros e do pólo de origem e o ângulo
comp .
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
40
p2 z1 z2 p1 comp
p2 10, 741
(4.27)
Assim, a freqüência do segundo pólo fica definido através de (4.28)`. Esta
freqüência é obtida considerando a operação do sistema na freqüência de corte desejada.
fc
f p2 1
tg p2
180
f p2 21,58 kHz
(4.28)
Com as condições expostas tem-se condiçãio suficiente para o dimensionamento
do compensador de tensão do inversor trifásico.
Logo, com a função transferência do controlador e estabelecendo que o valor do
resistor Riz seja dado por
Riz 10 k
(4.29)
Com base em (4.29) e (4.23) determinam-se os valores para os componentes do
controlador responsáveis pelos zeros da função Cv ( s) .
Ci
1
2 Riz f z1
(4.30)
E,
C fz
1
2 R fz f z2
(4.31)
Possibilitando determinar o valor do capacitor Ci como mostra (4.32).
Ci 12,91 nF
Rip
Riz
2 Ci Riz f p1 1
(4.32)
(4.33)
Sendo que a freqüência do pólo é 25 vezes maior que a freqüência de
ressonância. Através de (4.33), obtém-se (4.34).
Rip 605, 751
(4.34)
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
41
Avaliando somente o ganho do controlador, observa-se que o ganho na
freqüência de corte é dado por
k pz 14 dB
(4.35)
Portanto o ganho kv do controlador é a soma em módulo do ganho de H ( s ) e do
ganho provocado pelos pólos e zeros do controle, assim, tem-se (4.36).
k1 k pz
kv 10
20
(4.36)
Pode-se escrever (4.37).
R fz kv Rip
(4.37)
Obtendo,
R fz 8, 47 k
(4.38)
E desta forma,
C fz 15, 24 nF
(4.39)
A Tabela 4-3 apresenta o dimensionamento do circuito de controle do inversor
de tensão.
A Figura 4-3 e a Figura 4-4 mostram os diagramas de Bode do controlador de
tensão do inversor, para o módulo (em dB) e fase, respectivamente.
Tabela 4-3 – Dimensionamento dos elementos do controlador.
Grandeza
Valor Nominal
Rip
605, 751
Riz
10 k
Ci
12,91 nF
R fz
8, 47 k
C fz
15, 24 nF
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
42
Figura 4-3 – Diagrama de Bode em dB do módulo do controlador utilizado para o inversor.
Figura 4-4 – Diagrama de Bode da fase para o controlador utilizado para o inversor.
4.6 Função de Transferência de Laço Aberto do Inversor
A função de transferência de laço aberto contempla a planta do inversor, o ganho
do sensor e a função transferência do controlador. Multiplicando estes termos, obtêm-se
os diagramas de Bode de módulo (em dB) e fase mostrados na Figura 4-5 e na Figura
4-6, respectivamente.
Os gráficos apresentados satisfazem os critérios de freqüência de cruzamento e
margem de fase requerida, que para este caso é de 52 . Portanto, o sistema é estável
permitindo através da ação de controle o seguimento da tensão de referência.
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
43
Figura 4-5 – Diagrama de Bode em dB do módulo da função transferência de laço aberto do
inversor.
Figura 4-6 - – Diagrama de Bode da fase da função transferência de laço aberto do inversor.
4.7 Descrição dos Circuitos de Simulação
Para demonstrar que o modelo matemático do inversor trifásico de tensão é
valido, propõem-se a simulação da estrutura, tendo como parâmetros as especificações
definidas na Tabela 4-1. O objetivo é mostrar que o controle das tensões de linha
utilizando a transformada de Clarke é eficaz e condizente com a teoria desenvolvida.
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
44
Para validar o modelo, apresenta-se na Figura 4-7 o circuito de potência do
inversor trifásico de tensão utilizado nas simulações numéricas efetuadas no software
PSim. Como descrito no decorrer deste trabalho e da clara observabilidade da Figura
4-7, a estrutura não apresenta conexão com o neutro, ou seja, o sistema é a três fios.
Na Figura 4-8 estão representados os circuitos responsáveis pela monitoração
das tensões de linha do inversor. Estes sinais são atenuados através de um sensor de
tensão, que por sua vez são aplicados em um bloco responsável pela transformação
destes, nas coordenadas 0 , resultando em V0 , V e V . Da mesma forma, na Figura
4-8, apresenta-se a transformação de Clarke das tensões de referência, gerando as
tensões Vref 0 , Vref e Vref .
Figura 4-7 – Circuito de potência implementado para simulações.
Os sinais obtidos das transformações das tensões de linha e das tensões de
referências são comparados, resultando nos sinais de erro definidos como Ve 0 , Ve e
Ve , representados no diagrama de blocos da Figura 3-6
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
45
Figura 4-8 – Implementação da transformação 0 para as tensões de linha e de referência.
Figura 4-9 – Circuito de controle implementado para simulações.
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
46
Na Figura 4-9 estão representados os controladores das seqüências 0 . Os três
controladores são projetados tendo como parâmetros, os valores de resistências e
capacitâncias obtidos através das especificações de projeto.
Os três controladores apresentam os mesmos valores para as resistências e
capacitâncias, uma vez que, a transformação 0 , permite fazer o desacoplamento da
estrutura e projetar um controle adequado do inversor trifásico, seguindo os critérios de
freqüência de corte e margem de fase desejada.
A Figura 4-10 representa o circuito destinado a transformação inversa das
coordenadas 0 . Os sinais obtidos da ação de controle, representados na Figura 4-10,
como Dc 0 , Dc e Dc , são aplicados em um bloco responsável pela transformação
destas variáveis em coordenadas reais. Os resultados deste processo geram os sinais D1 ,
D2 e D3 , os quais são responsáveis pelos comandos dos interruptores do grupo superior
( S1 , S2 e S3 ), enquanto que os sinais complementares de D1 , D2 e D3 geram os
comandos para os interruptores do grupo inferior ( S4 , S5 e S6 ). Todo este processo está
detalhado na Figura 4-10.
A partir das explicações apresentadas dos circuitos constituintes para a
simulação do inversor trifásico de tensão, dá-se inicio as representações das formas de
ondas obtidas no software PSim.
Figura 4-10 – Circuito de comando dos interruptores.
4.7.1 Resultados de Simulação
As simulações da estrutura consiste na aplicação dos três casos: um primeiro em
que o inversor opera sem carga, após um determinado tempo, ocorre a conexão com
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
47
uma carga do tipo resistiva balanceada. Por fim, aplica-se um degrau de carga no
inversor trifásico, desbalanceado uma das fases da estrutura.
O objetivo de apresentar tais simulações consiste em avaliar o comportamento
do controle das tensões de linha do inversor através da transformada de Clarke,
verificando os efeitos causados pela operação a vazio e com desbalanço de carga.
A Figura 4-11 apresenta as tensões de linha do inversor trifásico e as correntes
dos indutores de filtragem. Observa-se claramente através da figura, as perturbações
provocadas em 37,5ms e 70,83ms , que representam a conexão com a carga resistiva e
o desequilíbrio na fase 1, respectivamente.
Figura 4-11 – Tensões de linha e correntes nos indutores.
A Figura 4-12 apresenta o detalhe das tensões de linha no momento em que se
conecta a carga resistiva. Já a Figura 4-13 representa o detalhe das tensões de linha no
momento em que há um desequilíbrio na fase 1, que apresenta a metade da resistência
R
Figura 4-12 – Detalhe das tensões de linha no instante em que se conecta a carga.
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
48
Figura 4-13 - Detalhe das tensões de linha no instante em que se desequilibra a fase 1.
Como pode ser observado na Figura 4-12 e Figura 4-13, a ação de controle se
faz valer estabilizando rapidamente as perturbações provocadas e, portanto,
estabilizando as tensões de linha.
A Figura 4-14 apresenta as tensões aplicadas na carga resistiva, durante o
intervalo de tempo em que o inversor opera com cargas balanceadas e com cargas
desbalanceadas. Pode-se notar que no momento em que ocorre o desequilíbrio de carga,
as tensões de carga são desequilibras, embora as tensões de linha estejam em equilíbrio.
Isto se deve ao fato do controle ser efetuado sobre as tensões VAB , VBC e VCA .
Figura 4-14 – Tensões de fase para a transição de desequilíbrio de carga.
A Figura 4-15 representa as tensões de referência e as tensões V0 V V nas
coordenadas 0 . É importante ressaltar que o controle das tensões de linha para um
sistema a três fios, permite efetuar o controle apenas das componentes , uma vez
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
49
que, ao se perturbar o sistema, a componente de seqüência zero não é evidente, mesmo
com a implementação do controle para tal.
Figura 4-15 – Tensões de referência e de linha nas coordenadas 0 .
Sabe-se que a componente de seqüência zero das tensões de linha é dada por
(4.40).
V0
1
v12 (t ) v23 (t ) v31 (t )
2
(4.40)
Onde:
v12 (t ) v23 (t ) v31 (t ) 0
(4.41)
As equações (4.40) e (4.41) justificam porque mesmo desequilibrando o sistema
a componente de seqüência zero é nula. Se o controle fosse feito para as tensões de fase,
no momento em que a carga sofresse um desbalanço, a componente de seqüência zero
seria considerada e como o sistema é a três fios o controle não seria útil, pois agora esta
componente não circularia pelo inversor, provocando instabilidade.
A Figura 4-16 apresenta a ação de controle das variáveis VD 0 , VD e VD , e as
tensões VD1 , VD 2 e VD 3 . Os detalhes da ação de controle durante as perturbações estão
apresentadas na Figura 4-17 e Figura 4-18, respectivamente.
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
50
Figura 4-16 – Ação de controle VD 0 VD VD e sinais VD1 VD 2 VD 3 .
Figura 4-17 – Detalhe da ação de controle no instante de desequilíbrio de carga.
Figura 4-18 - Detalhe da ação de controle no instante de conexão da carga.
Gleyson Luiz Piazza
Exemplo de Projeto e Simulações
51
A tensão de braço VAn e as tensões VAB e V12 estão representadas na Figura 4-19.
Figura 4-19 – Tensão VAn e tensões VAB e V12 .
A ondulação da corrente do indutor pode ser visualizada através da Figura 4-20.
Figura 4-20 – Detalhe da ondulação da corrente do indutor para a carga equilibrada.
Gleyson Luiz Piazza
CAPÍTULO 5
Considerações Finais
Os resultados obtidos neste trabalho possibilitaram validar o modelo matemático
elaborado para o inversor trifásico de tensão. Este modelo é a representação das tensões
de linha através da transformação 0 , que permite um desacoplamento destas
variáveis.
A partir disto, elaborou-se uma metodologia para o controle das tensões de linha
nas coordenadas 0 . As tensões de linha são monitoradas e transformadas nas
componentes 0 , que por sua vez são subtraídas das tensões de referência, resultando
nas tensões de erro, as quais são aplicadas nos controladores.
Os resultados das ações de controle são transformados em variáveis reais que
quando comparados com uma onda do tipo triangular geram os pulsos de comandos
para os interruptores do inversor trifásico.
O quarto capítulo possibilitou validar os estudos realizados, apresentando
resultados satisfatórios, comprovados através das simulações, no controle das tensões de
linha, mesmo com as perturbações provocadas.
Gleyson Luiz Piazza
REFERÊNCIAS BIBLIOGRÁFICAS
[1]
F. Gerent, “Metodologia de Projeto de Inversores Monofásicos de tensão Para
Cargas Não-Lineares”, Dissertação De Mestrado, Universidade Federal De Santa
Catarina, 2005;
[2]
K. Ogata, “Modern Control Engineering”, Prentice-Hall Inc., 1997.
[3]
I. Barbi, D.C. Martins, “Introdução ao Estudo dos Conversores CC-CA”, Edição
dos autores, Florianópolis, 2005;
Gleyson Luiz Piazza