Escola Secundária Emídio Navarro
Curso Profissional de Electrónica, Automação e Computadores
Disciplina de Automação e Computadores
Arrancadores electrónicos e
Variadores de velocidade
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
1/31
Arrancadores electrónicos e
Variadores de velocidade
O modo mais habitual de arrancar motores assíncronos é por
ligação directa à rede eléctrica. Esta técnica é adequada a
muitos tipos de máquinas. No entanto, o método colide por
vezes com restrições que podem ser inconvenientes para
algumas aplicações, ou mesmo incompatíveis com as funções
desejadas para a máquina:
A corrente de pico no arranque pode interferir com o
funcionamento de outros equipamentos ligados na mesma linha
de alimentação.
Os choques mecânicos durante o arranque que não podem
ser tolerados pela máquina ou podem pôr em perigo o conforto
e a segurança dos utilizadores.
A aceleração e desaceleração que não podem ser
controladas.
A velocidade que não pode ser controlada.
Arrancadores e variadores de velocidade são capazes de lidar
com estes problemas.
A tecnologia electrónica tornou esses sistemas mais flexíveis e
alterou o seu campo de aplicação. Contudo, é ainda importante
efectuar a escolha com correcção.
O propósito deste “Caderno Técnico” é providenciar uma
informação mais profunda sobre estes dispositivos de modo a
facilitar a sua definição no projecto de equipamentos ou na
melhoria ou mesmo substituição de um conjunto de comutação
para controlo e protecção de motores.
Tabela de conteúdos
1 Breve história e notas
2 Principais modos de
funcionamento e tipos de
controladores electrónicos
3 Estrutura e constituição de
arrancadores e variadores
4 Regulador de velocidade
variável para motores CC
5 Inversor de frequência
para motores assíncronos
6 Outras funções dos
variadores de velocidade
1.1 Breve história
1.2 Notas: Principais funções dos arrancadores electrónicos
e dos variadores de velocidade
2.1 Principais modos de funcionamento
2.2 Principais tipos de dispositivos
p. 6
p. 9
3.1 Estrutura
3.2 Constituição
4.1 Princípio geral
4.2 Modos de funcionamento possíveis
5.1 Princípio geral
5.2 Funcionamento V/f
5.3 Controlo Vectorial
5.4 Controlador de tensão para motores assíncronos
5.5 Controlador de motores síncronos
5.6 Controlador de motores passo-a-passo
p. 11
p. 13
p. 17
p. 18
p. 19
p. 20
p. 21
p. 26
p. 28
p. 29
6.1 Opções de diálogo
6.2 Funções integradas
6.3 Cartas opcionais
p. 30
p. 30
p. 31
7 Conclusão
p. 2
p. 2
p. 31
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
2/31
Breve história e notas
1.1 Breve história
Inicialmente, utilizavam-se para o
arranque de motores eléctricos e
controlo de velocidade, arrancadores a
reóstato, controladores mecânicos e
conjuntos rotativos (Ward Leonard
nomeadamente). Mais tarde, surgiram
os arrancadores electrónicos e
controladores de velocidade como
sistemas modernos de baixo custo,
como solução eficiente e de fácil
manutenção para as aplicações
industriais.
Um arrancador ou controlador
electrónico é um conversor de energia,
que modula a energia eléctrica
fornecida ao motor.
Os arrancadores electrónicos são
utilizados apenas para motores
assíncronos. São uma espécie de
controladores de tensão.
Os variadores de velocidade garantem
uma aceleração e desaceleração
gradual e permitem adequar a
velocidade às condições precisas de
funcionamento.
Os variadores de velocidade do tipo
rectificação controlada são utilizados
para fornecer potência a motores CC e
os inversores de frequência são
usados para os motores CA.
Historicamente, os controladores para
os motores DC apareceram primeiro.
Os inversores de frequência eficientes e
de baixo custo apareceram como
resultado dos avanços verificados na
electrónica de potência e na
microelectrónica.
Os modernos inversores de frequência
podem ser usados para fornecer
potência a motores assíncronos normais
com níveis de qualidade idênticos aos
dos melhores variadores de velocidade
para CC.
Alguns fabricantes disponibilizam
mesmo motores assíncronos com
variador de velocidade acondicionado
numa caixa própria com terminais. Esta
solução é desenhada para conjuntos de
baixa potência (alguns poucos kW).
Os recentes desenvolvimentos em
variadores de velocidade e informações
sobre fabricantes são apresentados no
final deste “Caderno Técnico”. Estes
desenvolvimentos estão expandindo
significativamente as ofertas de
variadores e as opções disponíveis.
1.2 Notas: As funções principais dos arrancadores electrónicos e dos
variadores de velocidade
Aceleração controlada
A subida de velocidade de um motor é
controlada usando uma rampa linear
ou em S. Esta rampa é normalmente
ajustável e apresenta ainda um tempo
de subida da velocidade que é
adequado à aplicação seleccionada.
Controlo de velocidade
realimentação, (feedback) pelo que é
descrito como “em malha aberta”.
A velocidade do motor é definida por um
valor de entrada (tensão ou corrente)
conhecido por referência ou setpoint.
Para um dado valor de referência, esta
velocidade pode variar dependendo de
perturbações (variações na tensão de
alimentação, carga, temperatura). A
gama de velocidades é definida em
relação à velocidade nominal.
Um variador de velocidade não pode
ser ao mesmo tempo um regulador.
Isso significa que é um sistema
rudimentar onde o princípio de
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
3/31
Regulação de velocidade
Um regulador de velocidade é um
sistema controlado (ver Fig. 1). Tratase de um sistema de controlo com
amplificação de potência e uma malha
de realimentação pelo que é descrito
como “em malha fechada”.
A velocidade de um motor é definida
por uma referência. O valor da
referência é comparado
continuamente com um sinal de
realimentação , que é uma imagem da
velocidade do motor. Este sinal é
fornecido ou por um tacómetro
(gerador tacométrico) ou por um
Controlo da desaceleração
Quando um motor é desligado, vai
desacelerar apenas em função do
binário resistivo da máquina
(desaceleração natural).
Os arrancadores e variadores
electrónicos podem ser usados para
controlar a desaceleração por meio de
uma rampa linear ou em “S”, que é
normalmente independente da rampa
de aceleração.
Esta rampa pode ser ajustada de
modo a produzir um tempo de
desaceleração desde o a velocidade
de funcionamento até uma velocidade
intermédia ou mesmo nula. Se a
desaceleração desejada é maior do
que a desaceleração natural, o motor
tem
gerador de impulsos associado ao eixo
do motor.
Se é detectado um desvio devido a uma
variação de velocidade, os valores
aplicados ao motor (tensão e/ou
frequência) são automaticamente
corrigidos de modo a repor a velocidade
no valor inicial.
O controlo de realimentação torna a
velocidade virtualmente imune às
perturbações.
A precisão de um regulador é expressa
normalmente em % do valor nominal da
grandeza a ser controlada.
que desenvolver um binário resistivo a
somar ao binário resistivo da máquina.
Esta situação é chamada de travagem
eléctrica, a qual pode ser obtida seja
pelo fornecimento de energia à rede de
alimentação seja pela dissipação numa
resistência de travagem.
Se a desaceleração desejada é mais
lenta do que a desaceleração natural, o
motor deve desenvolver um binário
motor maior do que o binário resistente
da máquina e continuar a alimentar a
carga até à paragem do motor.
Inversão do sentido de rotação
A maior parte dos actuais variadores
possuem esta função. A ordem das
fases de alimentação do motor é
invertida seja por inversão da referência
de entrada seja por um comando lógico
no terminal ou por informação
transmitida por uma linha de comando.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
4/31
Travagem até paragem
Protecção incorporada
Este tipo de travagem pára o motor
sem controlo da rampa de
desaceleração.
Para os arrancadores e variadores de
velocidade de motores assíncronos,
isso consegue-se de um modo
económico, injectando corrente
contínua no motor através de um
sistema de potência especial. Como
toda a energia mecânica é dissipada
no rotor da máquina, a travagem tem
que ser intermitente.
Num variador para um motor CC, esta
função é conseguida ligando uma
resistência aos terminais da armadura.
Os modernos sistemas de variação
possuem protecção térmica própria e
para os motores.
Nestes sistemas, um microprocessador
usa a corrente medida e a informação
da velocidade (se a velocidade de
ventilação depende da velocidade de
rotação), para calcular a subida de
temperatura do motor e envia um sinal
de alarme no caso de uma subida
excessiva de temperatura.
Os controladores, em particular os
inversores de frequência, são
geralmente protegidos contra:
Curtocircuitos entre fases e entre fase
e terra.
Sobretensões e quedas de tensão.
Fases desiquilibradas.
Funcionamento a uma fase.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
5/31
2 Principais modos de funcionamento e tipos de
controladores electrónicos
2.1 Principais modos de funcionamento
Dependendo do tipo de conversor
electrónico, os variadores de
velocidade podem ser usados para
operar um motor num único sentido de
rotação (caso em que são conhecidos
por “unidireccionais”) ou para controlar
ambos os sentidos de rotação (caso
em que são conhecidos por
“bidireccionais”).
Os controladores capazes de
regenerar energia do motor
funcionando como gerador (modo
travagem) podem ser “reversíveis”. A
reversibilidade pode ser obtida seja
pela entrega de energia à rede de
alimentação (ponte de entrada
reversível) ou por dissipação de
energia através de uma resistência
com um chopper de travagem.
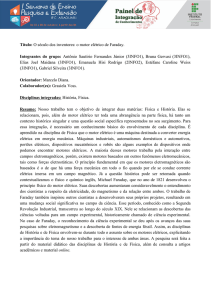
Sentido de
Rotação
1 (CW)
2 (CCW)
A figura 2 apresenta uma tabela resumo
das quatro situações possíveis no
diagrama binário-velocidade de uma
máquina.
Note bem que quando a máquina
funciona como gerador, deve ser-lhe
fornecida uma força.
Este estado é usado em particular para
a travagem.
A energia cinética então presente no
eixo da máquina é ou transferida para a
rede de energia de alimentação ou
dissipada nas resistências ou, no caso
de potências reduzidas, em perdas na
própria máquina
Funcionamento
Binário
Velocidade
Como motor
Como gerador
Como motor
Como gerador
Sim
Sim
Sim
Produto
Txn
Sim
Sim
Sim
Quadrante
1
2
3
4
Fig. 2 : As quatro situações possíveis de uma máquina no seu diagrama binário-velocidade
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
6/31
Controlador unidireccional
Habitualmente este tipo de controlador
não é reversível e é usado para:
Motores CC com conversor directo
(CA => CC) composto por uma ponte
mista de díodos e tiristores (ver
Fig.3a)
Um conversor indirecto constituído por
um chopper de travagem e uma
resistência correctamente
dimensionada é a solução ideal para
uma travagem instantânea
(desaceleração ou para engrenagens
de elevação quando o motor necessita
de gerar um binário de travagem para
segurar a carga).
Um conversor reversível é essencial
para um funcionamento duradouro
com uma carga negativa, como é o
caso, por exemplo, de um motor usado
para travagem numa bancada de
testes.
Controlador bidireccional
Este tipo de controlador pode ser
reversível ou não-reversível.
Se é reversível, a máquina funciona
nos quatro quadrantes e pode tolerar
uma travagem significativa,
Se não é reversível, a máquina
apenas funciona nos quadrantes 1 e 3.
Motores CA com conversor indirecto
(com transformação intermédia para
CC) constituído por uma ponte de
díodos na entrada e de um inversor de
frequência, que força a máquina a
funcionar no quadrante 1 (ver Fig.3b).
Nalguns casos, este conjunto pode ser
usado em configurações bidireccionais
(quadrantes 1 e 3)
Funcionamento com binário
constante
O funcionamento é descrito como sendo
a binário constante quando as
características da carga são tais que em
estado estacionário, o binário exigido é
aproximadamente o mesmo,
independentemente da velocidade
(ver Fig.4).
Este modo de funcionamento encontrase em telas transportadoras e
amassadores. Para este tipo de
aplicação, o controlador deve ser capaz
de fornecer um binário de arranque
elevado (pelo menos 1.5 vezes o binário
nominal) de modo a superar o atrito
estático e acelerar a máquina (inércia).
Funcionamento com binário variável
O funcionamento é descrito como sendo
com binário variável quando as
características da carga são tais que,
em estado estacionário, o binário
exigido varia com a velocidade.
É o caso, por exemplo, de bombas de
deslocamento helicoidal em que o
binário aumenta linearmente com a
velocidade (ver Fig.5a) ou de bombas
centrífugas (bombas e ventiladores) em
que o binário varia com o quadrado da
velocidade (ver Fig.5b).
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
7/31
Para um controlador destinado a este
tipo de aplicação, é suficiente um
binário de arranque reduzido
(normalmente 1.2 vezes o binário
nominal do motor).
O controlador apresenta funções
adicionais tais como a opção de saltar
as frequências de ressonância
causadas inadvertidamente pelas
vibrações da máquina.
O funcionamento acima da frequência
nominal é impossível devido à
sobrecarga que isso iria impor ao
motor e ao controlador.
Funcionamento a potência
constante
É este o caso, por exemplo, para um
moinho com uma velocidade angular
que tem que ser reduzida, à medida que
o diâmetro aumenta com o material a
ser moído. É também o caso dos
motores em máquinas ferramenta. A
gama de funcionamento a potência
constante é limitada naturalmente, nas
velocidades baixas pela corrente
fornecida pelo controlador e nas
velocidades altas pelo binário motor
disponível. Daí resulta a necessidade de
controlar cuidadosamente o binário
motor disponível nas máquinas
assíncronas e a capacidade de
comutação nas máquinas CC.
Este é um caso especial de binário
variável. O funcionamento é descrito
como sendo de potência constante
quando o binário fornecido pelo motor
é inversamente proporcional à
velocidade angular (ver Fig.6).
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
8/31
2.2 Tipos principais de controlador
Iremos apenas referir os tipos de
controlador mais actuais e as soluções
tecnológicas normalizadas.
Existem inúmeros tipos de esquemas
para variadores de velocidade:
subsíncronos em cascata,
cicloconversores, comutadores de
corrente, choppers, etc.
Os leitores mais interessados
encontrarão uma descrição exaustiva
nas seguintes publicações:
“Accionamento eléctrico a velocidade
variável”, (obra de Jean Bonal e Guy
Séguier que descreve sistemas
eléctricos de variadores de velocidade)
e “Utilização industrial dos motores de
corrente alternada” (por Jean Bonal
que descreve motores CA em
aplicações industriais).
Os motores CC e os respectivos
variadores foram as primeiras soluções
industriais. O seu uso foi declinando nas
últimas décadas à medida que os
inversores de frequência assumiam o
papel de liderança.
Os motores assíncronos são de facto
mais robustos e económicos do que os
motores CC.
Ao contrário dos motores CC, os
motores assíncronos são normalizados
num invólucro de índice de protecção
IP55 e são quase invulneráveis às
condições de trabalho e quase imunes
às condições de ambientais
(derrames de água, pó, atmosferas
instáveis, etc.).
Rectificadores controlados para
motores CC
O rectificador fornece corrente
contínua a partir de uma alimentação
CA monofásica ou trifásica onde o
valor médio da tensão é controlado.
Os semicondutores de potência, são
configurados como pontes de Graetz
mono ou trifásicas (ver Fig.7).
A ponte pode ser do tipo díodo/tiristor
(mista) ou tiristor/tiristor (completa).
Esta última solução é a mais comum
pois melhora o factor de forma da
corrente fornecida.
O motor CC possui normalmente
excitação separada, excepto para as
potências reduzidas, onde se usam
motores de íman permanente.
Este tipo de variador é adequado a
qualquer tipo de aplicação.
As únicas restrições são as impostas
pelo motor CC, em particular a
dificuldade de atingir velocidades
elevadas e a respectiva manutenção
(as escovas têm que ser substituídas).
Inversor de frequência para motores
assíncronos
O inversor fornece uma frequência
trifásica variável CA a partir de uma
frequência fixa alternada da rede de
alimentação (ver Fig.8). Pode ser
utilizada uma alimentação monofásica
no caso das potências reduzidas
(poucos kW) e uma alimentação trifásica
para potências mais elevadas.
Alguns variadores para potencies
reduzidas podem aceitar quer
alimentação monofásica quer trifásica. A
tensão de saída do variador é sempre
trifásica. De facto os motores
assíncronos monofásicos não são
adequados para alimentação a partir de
inversores de frequência.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
9/31
Os inversores de frequência podem
alimentar motores de rotor em gaiola
normais com todas as vantagens
inerentes a esses motores:
normalização, baixo custo, resistência,
protecção contra derrames,
manutenção nula.
Como estes motores são autorefrigerados, a sua única restrição de
funcionamento é o uso continuado em
velocidade reduzida, devido à redução
de ventilação. Se for necessário este
tipo de funcionamento, deverá usar-se
um motor especial, dotado de um
sistema de ventilação forçada.
Variador de tensão para arranque de
motores assíncronos
O variador fornece, a partir da rede de
CA, uma tensão alternada de frequência
igual à da rede, obtendo-se o controlo
do valor eficaz da tensão por
modificação do ângulo de disparo dos
semicondutores de potência – dois
tiristores ligados ânodo-cátodo para
cada fase do motor. (ver Fig.9).
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
10/31
3 Estrutura e constituição dos arrancadores e variadores
electrónicos
3.1 Estrutura
Os arrancadores e variadores de
velocidade electrónicos são
constituídos por dois módulos,
incluídos num invólucro único (ver
Fig.10):
Um módulo de controlo, que gere o
funcionamento do dispositivo.
Um modulo de potência, que fornece
potência ao motor na forma de energia
eléctrica.
O módulo de controlo
Nos modernos arrancadores e
variadores, todas as funções são
controladas por um microprocessador,
que utiliza os parâmetros, os
comandos enviados por um operador
ou por uma unidade de
processamento e os resultados de
medições, como por exemplo, a
velocidade, a corrente, etc.
Juntamente com circuitos dedicados
(ASICs), as funções de cálculo dos
microprocessadores tornam possível
executar algoritmos de controlo muito
eficientes e, em especial, reconhecer
os parâmetros da máquina associada.
O microprocessador usa esta
informação para gerir as rampas de
desaceleração e aceleração, o
controlo de velocidade e a limitação de
corrente, assim como para controlar os
componentes de potência. As medidas
de protecção e de segurança são
processadas por circuitos dedicados
(ASICs) ou por circuitos integrados em
módulos de potência (IPMs).
Os limites de velocidade, perfis de
rampa, limites de corrente e outros
parâmetros de funcionamento são
definidos através de teclados integrados,
ou através de PLCs (em redes de
campo) ou PCs.
De igual modo, os diferentes comandos
(run, stop, travagem, etc.) podem ser
enviados via HMIs, PLCs ou PCs.
Os parâmetros de funcionamento,
alarmes e dados de falhas podem ser
visualizados por LEDs, displays de
segmentos ou LCDs. Em alternativa,
podem ser enviados à distância por
redes de campo para sistemas de
supervisão.
Os relés internos, que são normalmente
programáveis, fornecem os seguintes
dados:
Falha (alimentação de rede, térmico,
produto, sequência, sobrecarga, etc.).
Monitorização (nível de velocidade,
pré-alarme, fim do arranque)
As tensões necessárias para todas as
medições e circuitos de controlo são
fornecidos por uma fonte de alimentação
que está integrada no variador e
electricamente isolada da linha de
alimentação.
O modulo de potência
Os componentes principais do modulo de
potência são:
Componentes de potência (díodos,
tiristores, IGBTs, etc.)
Interfaces para medida de tensões
e/ou correntes.
Na maior parte dos casos uma unidade
de ventilação.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
11/31
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
12/31
3.2 Constituição
Os componentes de potência (ver
Fig.11) são semicondutores discretos
e como tal podem ser ligados como
comutadores estáticos que podem
assumir um de dois estados: on ou off.
Estes componentes, combinados num
modulo de potência, formam um
conversor que fornece potência ao
motor eléctrico a uma tensão variável
e/ou frequência variável a partir da
tensão e frequência fixas da rede de
alimentação.
Os componentes de potência são a
chave do controlo de velocidade e o
progresso verificado nos últimos anos
levou ao desenvolvimento de
variadores de velocidade de custo
reduzido.
Nota
Os materiais semicondutores como o
silício possuem uma resistividade
entre a dos condutores e a dos
isoladores. Os seus átomos possuem
4 electrões periféricos. Cada átomo
associa-se com os quatro adjacentes
para criar uma estrutura estável de 8
electrões.
Um semicondutor tipo P obtém-se
adicionando ao silício puro uma
pequena proporção de uma substância
cujos átomos possuam 3 electrões
periféricos.
É então necessário adicionar um outro
electrão para criar a estrutura estável
de 8 electrões, no que resulta um
excesso de cargas positivas.
Um semicondutor tipo N obtém-se
adicionando ao silício puro uma
pequena proporção de uma substância
cujos átomos possuam 5 electrões
periféricos.
Daí resulta um excesso de electrões e
logo, de cargas negativas.
O díodo
O díodo é um semicondutor não
controlado, constituído por duas
regiões, P (ânodo) e N (cátodo), que
apenas permitem a passagem da
corrente num único sentido, do ânodo
para o cátodo.
O díodo conduz a corrente quando a
tensão do ânodo estiver mais positive
do que a do cátodo e assim comporta-
se como um interruptor fechado.
O díodo bloqueia a corrente e comportase como um interruptor aberto se a
tensão do ânodo se tornar menos
positiva do que a tensão do cátodo.
As características principais do díodo
são as seguintes:
No estado condutor (on):
o Uma queda de tensão constituindo
um limiar de tensão devido a uma
resistência interna.
o Uma corrente máxima contínua (da
ordem de grandeza dos 5000 A
eficazes para a maior parte dos
componentes)
No estado não condutor (off), uma
tensão máxima possível que não pode
exceder os 5000 V de pico.
O tiristor
Trata-se de um componente
semicondutor constituído por quatro
camadas alternadas: P-N-P-N.
Comporta-se como um díodo ao ser
enviado um impulso de controlo ao
eléctrodo chamado gate.
Esta comutação (ou disparo) é apenas
possível se o ânodo estiver a uma
tensão mais positiva do que o cátodo.
O tiristor comuta para o estado off
quando a corrente deixa de por ele
passar. A energia de disparo a ser
fornecida à gate é independente da
corrente a ser controlada.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
13/31
As características principais do tiristor
são as seguintes:
No estado de condução (on):
o Uma queda de tensão resultante
de uma tensão limiar e de uma
resistência interna.
o Uma corrente contínua máxima
admissível (da ordem de grandeza
dos 5000 A eficazes para a maior
parte dos componentes)
No estado de não condução (off):
o
o
o
Uma tensão inversa e directa
máxima admissível (superior a
5000 V pico). As tensões directa e
inversa são normalmente
idênticas.
Um tempo de recuperação inversa
que é o tempo mínimo durante o
qual, se for aplicada ao dispositivo
uma tensão ânodo-cátodo
positiva, este voltará a comutar
espontaneamente (disparar).
Uma corrente de gate que comuta
(dispara) o componente.
Alguns tiristores são projectados para
funcionar à frequência da rede de
alimentação e outros, designados por
tiristores rápidos (high-speed),
poderão funcionar a vários kHz
utilizando um circuito de extinção.
Alguns tiristores rápidos (high-speed)
possuem tensões de corte directa e
inversa assimétricas.
Não se torna necessário manter a
corrente na gate enquanto o tiristor
conduz.
O tiristor GTO (Gate Turn Off)
Trata-se de um tipo especial de tiristor
rápido que pode ser extinto pela gate. O
fornecimento de uma corrente positiva à
gate leva o semicondutor a iniciar a
condução, desde que a tensão ânodocátodo seja positiva. O tiristor é
bloqueado por inversão da polaridade da
corrente de gate. Os GTOs são utilizados
em conversores de muito alta potência
pois são capazes de controlar correntes
e tensões elevadas (até 5000 V e
5000 A). Contudo, como os IGBTs
continuam em desenvolvimento, o
mercado de GTOs vai declinando.
As características principais dos tiristores
GTO são as seguintes:
No estado de condução (on):
o
o
o
o
Uma queda de tensão resultante de
um limiar de tensão e de uma
resistência interna.
Uma corrente de manutenção
destinada a reduzir quedas na
tensão directa.
Uma corrente contínua directa
máxima admissível
Uma corrente de corte para
bloquear a corrente.
No estado de não-condução (off):
Em esquemas normais, aparecem
normalmente associados a díodos
ligados back-to-back e os fabricantes
de semicondutores usam esta
característica especial para aumentar
a tensão directa que o componente
pode tolerar no estado de nãocondução (off).
Actualmente, estes componentes são
substituídos por GTOs, transístores de
potência e, fundamentalmente por
IGBTs (Insulated Gate Bipolar
Transistors).
o
o
o
Tensões máximas, directa e inversa
admissíveis assimétricas, como os
tiristores rápidos e pelas mesmas
razões.
Um tempo de recuperação que é o
tempo mínimo durante o qual a
corrente de extinção deve ser
mantida para impedir o disparo
espontâneo.
Uma corrente de gate que dispara o
componente.
Os GTOs podem funcionar a frequências
de vários kHz.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
14/31
O transístor
O IGBT
Trata-se de um dispositivo
semicondutor bipolar controlado,
constituído por três camadas, P-N-P
ou N-P-N.
Apenas permite a condução de
corrente num dos sentidos: do emissor
para o colector. No tipo P-N-P e do
colector para o emissor no tipo N-P-N.
Os transístores tipo N-P-N, muitas
vezes configurados como transístores
tipo Darlington, podem funcionar às
tensões industriais.
O transístor pode funcionar como um
amplificador. O valor da corrente que
atravessa o transístor é determinado
pela corrente de controlo que circula
na sua base. Contudo, pode também
funcionar como interruptor estático
discreto: aberto quando não existe
corrente de base e fechado quando
está saturado. Este segundo modo de
funcionamento é o usado em circuitos
de potência e variadores.
Os transístores bipolares podem ser
utilizados para tensões até1200 V
admitem correntes até 800 V.
Este componente tem vindo a ser
substituído em conversores por IGBTs.
Quanto ao tipo de funcionamento no
qual estamos interessados, as
características principais do transístor
bipolar são as seguintes:
Este dispositivo é um transístor de
potência controlado pela tensão
aplicada a um eléctrodo designado por
gate que está isolado do circuito de
potência, daí o nome Insulated Gate
Bipolar Transistor (IGBT).
Este dispositivo necessita de níveis
mínimos de energia para fazer circular
correntes elevadas.
Actualmente, este dispositivo é utilizado
como interruptor discreto na maior parte
dos inversores de frequência até às
mais elevadas potências. (vários MW).
As suas características tensão/corrente
são idênticas às dos transístores
bipolares, embora os seus níveis de
eficiência em termos de controlo de
energia e frequência de comutação
sejam significativamente maiores do
que dos outros semicondutores. As
características dos IGBTs estão sempre
a melhorar e estão hoje disponíveis
versões para tensões (> 3 kV) e
correntes elevadas (várias centenas de
amperes).
As principais características dos IGBTs
são as seguintes:
No estado de condução (on):
o
o
o
o
Uma queda de tensão composta
de um limiar de tensão e de uma
resistência interna.
Uma intensidade de corrente
contínua máxima admissível
Um ganho de corrente (para
manter a saturação do transístor a
corrente injectada na base deve
ser maior do que a corrente que
circula no componente, dividida
pelo ganho)
Uma tensão de controlo que permite
ligar ou desligar o componente.
No estado de condução (on):
o
Uma queda de tensão composta de
um limiar de tensão e de uma
resistência interna.
Uma intensidade de corrente
contínua máxima admissível
No estado de não-condução (off), uma
tensão directa máxima admissível.
Os IGBTs utilizados no controlo de
velocidade podem funcionar a
frequências de várias dezenas de kHz
No estado de não-condução (off), a
tensão máxima directa permitida.
Os transístores de potência utilizados
no controlo de velocidade podem
funcionar até frequências de vários
kHz.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
15/31
O transistor MOS
Os IPM (Intelligent Power Module)
O princípio de funcionamento deste
componente difere significativamente
dos anteriores em resultado da
alteração do campo eléctrico no
semicondutor, obtida por polarização
de uma gate isolada. Daí resulta o
nome “Metal Oxide Semiconductor”.
A sua utilização no controlo de
velocidade está limitado às tensões
reduzidas (variadores de velocidade
alimentados a baterias) ou às
aplicações de reduzida potência, em
resultado do excessivo preço a pagar
pela superfície de silício requerida,
para obter, no estado de condução,
uma tensão de corte elevada, com
uma queda de tensão reduzida.
As características principais de um
transístor MOS são as seguintes:
Na realidade, não se trata de um novo
semicondutor, antes uma série de
transístores IGBT. Este módulo (ver
Fig.12) combina, num único invólucro,
uma ponte inversora com transístores
IGBT e a electrónica básica para o
controlo dos semicondutores, a saber:
Uma tensão de controlo que garanta
a comutação on/off.
Isolamento eléctrico para o módulo.
No estado de condução (on):
o
o
Uma resistência interna
Uma intensidade de corrente
contínua máxima admissível.
7 x IGBT componentes (seis para a
ponte inversora e um para travagem).
Os circuitos de controlo dos IGBT
7 x díodos de potência de roda livre
associados aos IGBTs de forma a
garantirem a circulação da corrente.
Protecção contra curto-circuitos,
sobrecorrentes e temperaturas
excessivas.
A ponte rectificadora de díodos está
normalmente integrada no módulo.
Este conjunto é a melhor forma de lidar
com as ligações e controlo dos IGBTs.
No estado de não-condução (off),
uma tensão directa máxima admissível
(pode exceder 1000 V).
Os transístores MOS utilizados no
controlo de velocidade podem
funcionar a frequências de várias
centenas de kHz.
Vamos encontrá-los certamente na
maioria das fontes de alimentação
comutada na forma de componentes
discretos ou como circuitos integrados
contendo a potência (MOS) e os
circuitos de comando e controlo.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
16/31
4 Variador/regulador de velocidade para motores CC
4.1 Princípio geral
O conjunto Ward Leonard foi o
primeiro sistema de variação de
velocidade para motores CC.
Este conjunto, que compreendia um
motor controlado (normalmente
assíncrono) e um gerador CC de
excitação variável, fornecia energia a
um ou mais motores CC. A excitação
era controlada por um dispositivo
electromecânico (Amplidyne,
Rototrol, Regulex) ou por um sistema
estático (amplificador magnético ou
regulador electrónico). Hoje, tal
dispositivo está completamente
obsoleto e foi substituído pelos
variadores de velocidade a
semicondutor, capazes de realizar as
mesmas operações com nível
superior de eficiência.
Os variadores electrónicos de
velocidade são alimentados em
potência com uma tensão fixa pela
rede de alimentação CA e fornecem
ao motor uma tensão CC variável. O
circuito de excitação é alimentado por
uma ponte de díodos ou tiristores
(normalmente monofásica).
O circuito de potência é um
rectificador. Como a tensão a ser
fornecida é variável, este rectificador
deve ser um rectificador controlado,
i.e., deve conter componentes de
potência com características de
condução que possam ser
controladas (tiristores).
A tensão de saída é controlada pela
limitação em maior ou menor
extensão do tempo de condução em
cada alternância. Quanto maior for o
atraso do disparo do tiristor em
relação à passagem por zero, menor
o valor médio da tensão e portanto
menor a velocidade do motor
(lembre-se que o tiristor entra no
corte automaticamente quando a
corrente passa por zero).
Para variadores de potência reduzida
ou alimentados por baterias, o
circuito de potência, que pode ser
constituído por transístores de potência
(chopper), vai variar a tensão de saída
CC por ajuste do tempo de condução.
Este modo de funcionamento é designado
por PWM (Pulse Width Modulation).
Regulação
A Regulação é a manutenção precisa do
valor imposto, apesar das perturbações
(variação do binário resistente, da fonte
de alimentação, da temperatura).
Contudo, durante a aceleração, ou no
caso de uma sobrecarga, a corrente não
deve atingir um valor que possa fazer
perigar o motor ou a fonte de
alimentação.
Um loop de controlo interno do variador
mantém a corrente num valor aceitável.
Este valor pode ser acedido de forma a
ser ajustado em função das
características do motor.
A referência de velocidade é determinada
por um sinal analógico ou digital fornecido
pela rede de campo ou qualquer outro
dispositivo, que forneça uma tensão
correspondente á velocidade requerida.
A referência pode ser fixa ou variável
durante um ciclo de funcionamento.
A aplicação da tensão de referência é
feita através de rampas de aceleração e
desaceleração que garantem a variação
gradual da velocidade até ao valor
ajustado.
Estas rampas podem ter diversos perfis.
O ajuste das rampas define a duração da
aceleração ou desaceleração.
No modo de funcionamento em malha
fechada (closed loop mode), a velocidade
real é medida continuamente por um
tacogerador ou por um gerador de
impulsos e comparada com a referência.
Se for detectado um desvio, a electrónica
de controlo vai corrigir a velocidade.
A gama de velocidades estende-se por
por revoluções por minuto até à
velocidade máxima
Nesta gama de variação, é fácil atingir
taxas de precisão inferiores a 1% em.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
17/31
regulação analógica e inferiores a
1/1000 em regulação digital, tendo
em conta todas as possíveis
variações (sem carga/com carga,
variação da tensão, variação da
temperatura, etc.).
Este modo de regulação pode ser
implementado usando a medição da
tensão do motor e tendo em conta a
corrente que atravessa o motor
Neste caso, os níveis de eficiência
são ligeiramente inferiores, quer no
que respeita à gama de velocidades,
quer em termos de precisão (valores
% variáveis quanto ao funcionamento
sem carga e com carga).
Se for necessária travagem controlada,
seja por pedido seja pela natureza da
carga (binário motor), a energia deve ser
restituída à rede de alimentação.
Durante a travagem, o variador funciona
como inversor ou, por outras palavras, a
corrente que circula é negativa.
Os variadores capazes de realizar estes
dois tipos de funções (inversão e
travagem regenerativa) possuem duas
pontes ligadas costas com costas (ver
Fig.13).
Cada uma destas pontes pode ser usada
para inverter a tensão e a corrente bem
como o sinal para a energia que circula
entre a linha de alimentação e a carga.
Inversão do sentido de
funcionamento e travagem
regenerativa
Para inverter o sentido de rotação, a
tensão da armadura deve ser
invertida.
Isso pode ser obtido usando
contactores (esta solução é hoje
obsoleta) ou estaticamente por
inversão da polaridade de saída do
variador de velocidade ou a
polaridade da corrente de excitação.
O uso desta última solução é pouco
frequente, devido à constante de
tempo do campo do enrolamento.
4.2 Modos de funcionamento possíveis
Funcionamento a “binário
constante”
Com excitação constante, a
velocidade do motor é determinada
pela tensão aplicada à armadura do
motor. O controlo de velocidade é
possível entre o repouso e a tensão
nominal do motor, que é seleccionada
com base na tensão CA da
alimentação.
O binário motor é proporcional à
corrente na armadura e o binário
nominal da máquina pode ser
mantido para qualquer velocidade.
Funcionamento a “potência
constante”
Quando a máquina é alimentada à
tensão nominal, a sua velocidade
deve possuir uma ponte rectificadora
controlada que alimente o circuito de
excitação.
A tensão da armadura vai manter-se fixa e
igual à tensão nominal e a corrente de
excitação é ajustada de modo a obter-se a
velocidade requerida.
A potência exprime-se por
P=ExI
onde
E é a tensão de alimentação
I é a corrente na armadura
Para uma dada corrente na armadura a
potência vai ser constante durante toda a
variação de velocidade, mas a velocidade
máxima é limitada por dois parâmetros:
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
18/31
pode ainda ser aumentada por
redução da corrente de excitação.
Neste caso, o variador de velocidade
Os limites mecânicos da armadura e em
particular, a potência centrífuga máxima
que é tolerada pelo comutador.
As opções de comutação da
máquina que são, em geral, mais
restritivas.
O fabricante do motor deve assim
seleccionar o motor adequado,
nomeadamente no que respeita à gama
de variação a potência constante.
5 Inversor de frequência para motor assíncrono
5.1 Princípio geral
O inversor de frequência, que é
alimentado a tensão e frequência
constante pela rede de alimentação,
fornece uma alimentação CA a tensão e
frequência variáveis ao motor em
função das suas necessidades de
velocidade.
O fluxo deve ser mantido constante de
modo a facilitar o fornecimento de
potência a um motor assíncrono a
binário constante, independentemente
da velocidade.
Isso exige que a tensão e frequência
aumentem simultaneamente em igual
proporção.
Constituição
O circuito de potência é constituído por
um rectificador e um inversor, que utiliza
a tensão rectificada para produzir uma
tensão de amplitude e frequência
variáveis. (ver Fig.8).
Para cumprir com as directivas e
normas europeias (Comunidade
Europeia), instala-se um filtro na “rede
de alimentação” antes da ponte
rectificadora.
O rectificador é normalmente equipado
com uma ponte de díodos rectificadores
e um filtro constituído por um ou mais
condensadores, conforme a potência.
Um circuito limitador controla a corrente
no arranque. Alguns conversores usam
uma ponte de tirístores para limitar o
pico de corrente destes condensadores
de filtro, que são carregados a um valor
aproximadamente igual ao valor de pico
da sinusóide da linha de alimentação
(aprox. 560 V a 400 V trifásica).
Nota: Embora estejam equipados com
circuitos de descarga, estes
condensadores podem armazenar
tensões elevadas perigosas mesmo
semicondutores de potência
(normalmente IGBTs) e díodos de roda
livre associados.
Este tipo de controlador destina-se a
alimentar motores de rotor em gaiola de
esquilo.
A gama Altivar da Telemecanique
Pode ser utilizada para criar uma
pequena rede de alimentação de tensão
e frequência variáveis capaz de
alimentar um ou vários motores em
paralelo.
É constituído por:
Um rectificador com condensadores de
filtragem
Um inversor com 6 IGBTs e 6 díodos
Um chopper, ligado a uma resistência de
travagem (normalmente externa ao
produto)
Circuitos de controlo com transístores
IGBT
Uma unidade de controlo baseada num
microprocessador, que é usado para
controlar o inversor
Sensores internos para medir a corrente
do motor, a tensão CC aos terminais do
condensador e, nalguns casos, as
tensões aos terminais da ponte
rectificadora e do motor bem como de
todos os valores necessários para
controlar e proteger o variador de
velocidade.
Uma fonte de alimentação para
alimentar os circuitos electrónicos.
Esta fonte de alimentação é constituída
por um circuito de comutação ligado aos
terminais do condensador do filtro de
modo a utilizar esta reserva de energia.
Os variadores Altivar utilizam esta
característica para evitar os efeitos dos
transitórios produzidos pelas flutuações
da alimentação, garantindo assim
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
19/31
com a alimentação desligada.
O trabalho neste tipo de produtos deve
ser efectuado por pessoal trinado com
conhecimentos das precauções
essenciais a serem tomadas (circuitos
adicionais de descarga ou
conhecimento do período de espera).
A ponte inversora ligada a estes
condensadores utiliza seis
Esta técnica, conhecida por PWM
(Pulse Width Modulation), condiciona a
rotação a baixas velocidades e limita as
subidas de temperatura.
A frequência de modulação escolhida
é um compromisso: deve ser
suficientemente alta para reduzir o
ripple na corrente e o ruído acústico no
motor sem perdas significativas na
ponte rectificadora e nos
semicondutores.
Duas rampas controlam a aceleração
e a desaceleração.
excelente comportamento em linhas
sujeitas a perturbações significativas.
Controlo de velocidade
A tensão de saída é gerada pela
comutação da tensão rectificada,
utilizando impulsos de duração, e
portanto largura, que é modulada de
modo a que a corrente alternada
resultante seja o mais sinusoidal possível
(ver Fig.14).
O variador dispõe ainda de protecção
contra qualquer perturbação ou problema
que possa afectar a falha de uma fase.
Para algumas gamas, o rectificador, o
inversor, o chopper, o controlador e o
sistema de protecção contra curtocircuitos estão integrados num único
IPM.
Protecção integrada
O variador possui auto-protecção e
protege o motor contra as subidas de
temperatura excessivas desligando-o
até que a temperatura caia para um
nível seguro.
5.2 Funcionamento V/f
Neste tipo de funcionamento, a
referência de velocidade impõe uma
frequência no inversor e
consequentemente no motor, que
determina a velocidade de rotação.
Existe uma relação directa entre a
tensão da rede de alimentação e a
frequência (ver Fig.15). Este modo de
funcionamento é normalmente descrito
como funcionamento a V/f constante
ou funcionamento escalar.
Se não for aplicada compensação, a
veIocidade real varia com a carga, o que
limita a gama de funcionamento. Pode
ser aplicada compensação para lidar
com a impedância interna do motor e
para limitar a queda de velocidade no
arranque.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
20/31
5.3 Controlo vectorial
Os níveis de eficiência podem ser
significativamente aumentados através
do controlo electrónico baseado no
controlo vectorial de fluxo (FVC) (ver
Fig.16).
A maior parte dos variadores actuais
possuem esta função.
O conhecimento ou o cálculo dos
parâmetros da máquina permitem
omitir o sensor de velocidade na maior
parte das aplicações. Nesse caso,
pode usar-se um motor normal sujeito
às restrições habituais relativas ao
funcionamento prolongado a baixa
velocidade.
O variador produz informação a partir
dos valores medidos nos terminais da
máquina (tensão e corrente).
Este modo de funcionamento
possibilita níveis aceitáveis de
rendimento sem aumento dos custos.
Para obter estes níveis, é necessário
conhecer os parâmetros da máquina.
A máquina de reparação, se solicitada,
deve em particular, aplicar as
características indicadas na placa
sinalética do motor.
Parâmetros de regulação.
Estes são, nomeadamente:
UNS: Tensão nominal do motor
FRS: Frequência nominal do estator
NCR: Corrente nominal do estator
NSP: Velocidade nominal
COS: Factor potência do motor
(desfasagem)
O variador utiliza estes valores para
calcular as características do rotor (Lm,
Tr).
Variador com controlo vectorial de
fluxo sem sensores
No arranque, um variador de controlo
vectorial sem sensor (como o
Telemecanique ATV58F) realiza autoajuste para determinar os parâmetros do
estator Rs, Lf. Estas medições podem
ser realizadas com o motor ligado à
máquina controlada.
A duração destes ajustes varia de 1 a
10s, dependendo da potência da
máquina. Estes valores são
armazenados e podem ser usados pelo
controlador para estabelecer relações de
controlo.
O oscilograma da Figura 17 ilustra a
aceleração de um motor carregado até
ao seu binário nominal, controlado por
um variador sem sensores. Repare que o
binário nominal é atingido rapidamente
(em menos do que 0.2 s) e que a
aceleração é linear. A velocidade
nominal é atingida em 0.8 s.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
21/31
Controlador com controlo vectorial
de fluxo em malha fechada com
sensor
Outra opção consiste no uso de
controlo vectorial de fluxo em malha
fechada com sensor. Esta solução pode
ser usada para controlar
separadamente a corrente (Id) que
fornece o fluxo à máquina e a corrente
(Iq) que fornece o binário
O motor é controlado da mesma
maneira que um motor CC. Esta
solução (ver Fig.18) cumpre as
especificações das aplicações
complexas: dinâmica elevada no caso
de fenómenos transitórios, precisão da
velocidade, binário nominal na
paragem.
O binário máximo transitório é igual a 2
ou 3 vezes o binário nominal,
dependendo do tipo de motor. Para
além disso, a velocidade máxima atinge
frequentemente o dobro ou mais da
velocidade nominal, se a mecânica do
motor o permitir.
Este tipo de controlo permite ainda
bandas passantes elevadas e níveis de
rendimento comparáveis ou superiores
aos melhores controladores para
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
22/31
motores CC.
Por outro lado, o motor usado não é um
modelo normal, devido à presença de
um sensor e, se necessário, ventilação
forçada.
O oscilograma da Figura 19 apresenta
a aceleração de um motor carregado
com o binário nominal alimentado por
um variador de controlo vectorial de
fluxo com sensor. A escala de tempo é
de 0.1 s por divisão.
Comparado com o mesmo produto sem
sensor, o aumento de performance é
significativo. O binário nominal é
atingido após 80 ms e o tempo de
subida da velocidade nas mesmas
condições de carga é de 0.5 s.
Como conclusão, a tabela da Figura 20
compara os níveis de performance de
um controlador nas três configurações
possíveis.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
23/31
Inversão do sentido de
funcionamento e travagem
O sentido de funcionamento é
invertido pelo envio de uma ordem
externa (seja para uma entrada
designada para essa função seja
através de um sinal pelo bus de
comunicações), que inverte a
sequência de funcionamento dos
componentes do inversor, invertendo
assim o sentido de rotação do motor.
São possíveis diferentes cenários:
Cenário 1:
Inversão imediata do sentido de
controlo dos semicondutores.
Se o motor ainda roda quando o
sentido de rotação é invertido, isso irá
provocar um escorregamento brusco e
a corrente no controlador irá subir até
ao nível máximo possível (limite
interno). O binário de travagem é
reduzido devido ao elevado
escorregamento e a regulação interna
irá reduzir muito a velocidade de
referência. Assim que o motor atinge a
velocidade zero, a velocidade será
invertida seguindo a rampa. A energia
em excesso não absorvida pelo binário
resistivo e a fricção é dissipada no rotor.
Cenário 2:
Inversão do sentido de controlo dos
semicondutores precedido por
desaceleração com ou sem rampa.
Se o binário resistivo da máquina é tal
que a desaceleração natural é mais
rápida do que a rampa imposta pelo
controlador, o controlador irá continuar a
fornecer energia ao motor. A velocidade
irá descer gradualmente e inverter.
Pelo contrário, se o binário resistente da
máquina é tal que a desaceleração
natural é mais lenta do que a rampa
imposta pelo controlador, o motor irá
funcionar como gerador hipersíncrono e
devolver energia ao controlador.
No entanto, como a presença da ponte
de díodos impede a energia de ser
restituída à rede de alimentação, o
condensador de filtragem vai carregar, a
tensão irá subir e o controlador irá
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
24/31
bloquear. Para evitar isso, deve-se
ligar uma resistência aos terminais do
condensador através de um chopper,
de modo a limitar a tensão a um valor
adequado. O binário de travagem vai
ser limitado apenas pelas capacidades
do controlador, isto é, a velocidade vai
diminuir lentamente e inverter.
Para este tipo de aplicação o
fabricante disponibiliza resistências de
travagem dimensionadas de acordo
com a potência do motor e a energia a
ser dissipada.
velocidade da máquina (ver Fig.21).
No entanto, o funcionamento
permanente a baixas velocidades só é
possível se o motor estiver equipado de
uma unidade de ventilação forçada, o
que exige um motor especial. Os
variadores modernos de velocidade
possuem circuitos de protecção, que
criam uma imagem térmica do motor em
função da corrente, dos ciclos de
funcionamento e da velocidade de
rotação, protegendo assim o motor.
Como na maioria dos casos o chopper
está incluído de fábrica no controlador
apenas a presença de uma resistência
de travagem evidencia a presença de
um variador com capacidade de
travagem.
Este tipo de travagem é muito
económico. Assim vemos este tipo de
funcionamento usado para
desacelerar motores até ao repouso
sem ter que inverter o sentido de
rotação.
Travagem dinâmica por injecção CC
Funcionamento a “potência constante”
Pode obter-se a travagem de uma
forma económica e fácil modificando o
andar de saída do variador para um
chopper, o que injecta corrente
contínua nos enrolamentos. O binário
de travagem não é controlável e é
pouco eficaz, particularmente para
velocidades altas. Portanto, a rampa
de desaceleração não é controlada.
Apesar disso trata-se de uma solução
prática para reduzir o tempo de
travagem da máquina. Como a
energia é dissipada no rotor, este tipo
de funcionamento é, naturalmente,
pouco utilizado.
Quando a máquina é alimentada à
tensão nominal, é ainda possível
aumentar a sua velocidade fornecendolhe uma frequência maior do que da rede
de alimentação.
No entanto, como a tensão de saída do
inversor não pode exceder a da linha de
alimentação, o binário disponível diminui
na proporção inversa do aumento de
velocidade (ver Fig.21).
Acima da sua velocidade nominal, o
motor deixa de funcionar a binário
constante e funciona a potência
constante (P = Cw) enquanto isso for
permitido pela característica natural do
motor.
Modos de funcionamento possíveis
Funcionamento a “binário constante”
Como a tensão aplicada pelo variador
pode variar e assim como o fluxo da
máquina é constante (relação V/f
constante ou mesmo melhor com
controlo vectorial de fluxo), o binário
motor vai ser aproximadamente
proporcional à corrente e vai ser
possível obter o binário nominal da
máquina em toda a gama de
A velocidade máxima é limitada por dois
parâmetros:
A limitação mecânica associada ao
rotor.
O binário de reserva disponível. Para
uma máquina assíncrona alimentada a
tensão constante, onde o binário máximo
varia com o quadrado da velocidade, o
funcionamento a “potência constante” só
é possível numa gama de velocidades
determinada pela característica do
binário da própria máquina.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
25/31
5.4 Controlador de tensão para motores assíncronos
Este dispositivo de controlo de tensão,
que pode ser utilizado para iluminação
e aquecimento, só pode ser utilizado
com motores assíncronos de gaiola
resistiva ou de colector de anel
(ver Fig.22). A maior parte destes
motores assíncronos são trifásicos,
embora alguns sejam monofásicos,
para baixas potências (aprox. até 3
kW).
Frequentemente utilizados como
unidades de arranque/paragem
suaves, desde que não seja
necessário um binário de arranque
elevado, os controladores de potência
podem ser utilizados para limitar a corrente
de arranque, a queda de tensão resultante
e os choques mecânicos produzidos pelo
súbito aumento de binário.
As aplicações mais frequentes deste tipo
são em bombas e ventiladores centrífugos,
correias transportadoras, passadeiras
rolantes, pórticos de lavagem de carros,
máquinas equipadas com correias, etc. e
no controlo de velocidade em motores de
potência reduzida ou motores universais
como os das ferramentas eléctricas.
Contudo, para algumas aplicações,
como o controlo de velocidade de
pequenos ventiladores, os
controladores de potência foram todos
substituídos pelos inversores de
frequência, que são mais económicos
durante o seu funcionamento.
gaiola resistiva deve assim ser capaz de,
para velocidades reduzidas, dissipar as
perdas (pequenos motores até 3kW são
adequados para estas condições). Acima
disso, é necessário utilizar motores com
ventilação forçada. No caso dos motores
em anel, as resistências associadas devem
ser dimensionadas em função dos ciclos
de trabalho.
A decisão é deixada ao especialista, que
deve seleccionar o motor adequado.
No caso das bombas, a função de
paragem suave pode ser também
usada para eliminar os impulsos de
pressão.
No entanto, deve ter-se algum cuidado
na selecção deste tipo de variador de
velocidade.
Quando um motor escorrega, as suas
perdas são na realidade proporcionais
ao binário resistivo e inversamente
proporcionais à velocidade.
Um controlador de potência baseia-se
no princípio de redução da tensão de
forma a igualar o binário resistivo para
a velocidade pedida. O motor de
Estão disponíveis três tipos de
arrancadores no mercado:
Arrancadores com uma fase controlada
para potências reduzidas, arrancadores
com duas fases controladas (a terceira em
ligação directa), ou arrancadores com
todas as fases controladas.
Os dois primeiros sistemas só devem ser
utilizados em aplicações pouco exigentes,
devido ao aumento da taxa de frequências
harmónicas.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
26/31
Princípio geral
O circuito de potência possui 2
tiristores ligados head to tail em cada
fase. (ver Fig.9).
A variação de tensão é obtida
variando o tempo de condução dos
tiristores em cada alternância.
Quanto maior o atraso no disparo,
menor será o valor da tensão
resultante.
O disparo dos tirístores é controlado
por um microprocessador, que
também executa as seguintes funções:
Controlo do ajuste das rampas de
subida e descida da tensão; a rampa
de desaceleração apenas pode ser
executada se a duração natural de
desaceleração do sistema controlado
for superior.
Ajuste do limite de corrente.
Binário de arranque.
Travagem controlada por injecção
CC.
Protecção do controlador contra
sobrecargas.
Protecção do motor contra
aquecimento devido a sobrecargas ou
arranques frequentes.
Detecção de desequilíbrio de fases,
falha de fase ou falhas de tiristores.
Um painel de controlo, que mostra
vários dos parâmetros de
funcionamento, fornece assistência
durante a regulação, o funcionamento
e a manutenção
Alguns controladores de potência podem
controlar o arranque e a paragem de:
Um único motor
Vários motores simultaneamente dentro
de limites de potência.
Vários motores em sucessão por
comutação. Em situação normal, cada
motor é alimentado directamente a parir da
linha de alimentação através de um
contactor.
Inversão do sentido de rotação e
travagem
O sentido de rotação é invertido por
inversão das fases do inversor. A travagem
por contra-corrente é então aplicado e toda
a energia dissipada no rotor da máquina. O
funcionamento é por natureza intermitente.
Travagem por injecção CC dinâmica
Pode ter-se travagem económica fazendo
funcionar o andar de saída do arrancador
como rectificador, o que injecta corrente
contínua nos enrolamentos. O binário de
travagem não é controlado e a travagem é
pouco eficaz, em particular a velocidades
elevadas. Desse modo, a rampa de
desaceleração não é incontrolada. Esta
solução é prática para reduzir a duração
natural de paragem da máquina. Como a
energia é dissipada no rotor, este tipo de
funcionamento é também raro.
5.5 Controladores de motores síncronos
Princípio geral
Os controladores de motores
síncronos (ver Fig. 23) combinam um
inversor de frequência e um motor
síncrono de ímane permanente
dotado de um sensor.
Estes controladores são destinados a
mercados específicos como os robots
ou máquinas-ferramenta, onde se
exige um volume reduzido de
motores, aceleração rápida e uma
grande banda passante.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
27/31
O motor
O rotor do motor é dotado de
magnetos de imane permanente de
modo a obter uma intensidade de
campo reforçada num volume
reduzido. O estator possui três
enrolamentos de fase. Estes motores
aceitam sobrecargas de corrente
elevadas de modo a obter aceleração
elevada.
São dotados com um sensor de modo
a indicar ao controlador a posição
angular dos pólos do motor garantindo
assim a comutação dos enrolamentos.
O controlador
Nestes termos, o controlador funciona
no mesmo modo que um inversor de
frequência.
Possui também um rectificador e um
inversor com transístores para
modulação por largura de impulsos
(PWM) que restitui uma corrente de
saída de forma sinusoidal.
É frequente encontrar diversos
controladores deste tipo alimentados por
uma simples fonte de alimentação CC.
Numa máquina-ferramenta, cada
equipamento controla um dos motores
ligados aos eixos da máquina.
Uma fonte CC fornece energia a este
conjunto paralelo de controladores.
Este tipo de instalação permite que a
energia gerada na travagem de um dos
eixos seja fornecida ao conjunto.
Pode usar-se uma resistência associada a
um chopper, como nos inversores de
frequência, para dissipar o excesso de
energia de travagem.
As funções electrónicas de servocontrolo,
as constantes reduzidas de tempo
mecânicas e eléctricas, permitem
acelerações e, mais geralmente, bandas
passantes que são muito grandes,
associadas a velocidades dinâmicas
elevadas.
5.6 Controlador de motor passo-a-passo
Princípio geral
Os controladores de motores passo-apasso combinam electrónica de
potência idêntica aos inversores de
frequência com um motor passo-apasso (ver Fig. 24.)
Podem funcionar em modo malha aberta
(sem sensor) e destinam-se a aplicações
com controlo de posição.
O motor
O controlador
O motor pode ser um motor de
relutância variável, um motor de imane
permanente ou uma combinação de
ambos.
Quanto a esquema, o controlador é
semelhante a um inversor de frequência
(rectificador, filtros e ponte constituída por
semicondutores de potência).
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
28/31
No entanto, quanto ao funcionamento,
é fundamentalmente diferente na
medida em que o seu objective é o de
injectar corrente contínua nos
enrolamentos. Por vezes, utiliza
impulsos de largura variável (PWM)
para melhorar a eficiência, em
particular o tempo de subida da
corrente (ver Fig.25), o que possibilita
alargar a gama de funcionamento.
enrolamentos em cada sequência
As correntes nos dois enrolamentos
parecem duas correntes alternadas
desfasadas de 90°. O campo eléctrico
resultante é a composição vectorial dos
campos criados pelos dois enrolamentos.
O rotor toma assim todas as posições
intermédias possíveis. O diagrama abaixo
mostra as correntes de alimentação dos
enrolamentos B1 e B2 e as posições do
rotor são representadas por um vector.
O funcionamento em micro-passos
(ver Fig.26) pode ser utilizado para
multiplicar artificialmente o número das
posições possíveis do rotor pela
geração de passos sucessivos nos
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
29/31
6 Outras funções dos controladores de velocidade variável
6.1 Opções de diálogo
Para assegurar que o motor funciona
correctamente, os controladores são
equipados com vários sensores de
monitorização da tensão, das
correntes do “motor” e do estado
térmico do motor.
Esta informação, que é essencial para
o controlador, pode ser útil para o
funcionamento.
Os controladores e arrancadores mais
recentes dispõem de funções de
diálogo baseadas em redes de campo.
Isso fornece um meio de produzir
informação que é usada por um PLC e
um supervisor para controlar a
máquina.
O PLC usa ainda o mesmo canal para
enviar informação de controlo.
6.2 Funções incorporadas de fábrica
Com o fim de serem compatíveis com
o maior número de aplicações
possíveis, os controladores possuem
um número significativo de ajustes e
parametrizações, nomeadamente:
Tempos de rampas de aceleração e
desaceleração
Perfis de rampas (linear, S ou U)
Comutação de rampas, o que pode
ser utilizado, por exemplo, para
permitir uma aproximação suave.
Redução do binário máximo
controlado, usando uma entrada ou
referência lógica.
Funcionamento por joystick
Gestão do controlo de travagem em
aplicações de elevação
Selecção de velocidades prédefinidas.
Presença de um somador de sinais
de entrada, que pode ser usado para
somar referências de velocidade.
Comutação das referências
presentes na entrada do controlador
Presença de regulação PID para
aplicações simples de servocontrolo.
Paragem automática no caso de
falha de alimentação
Protecção térmica do motor usando
uma imagem gerada no controlador
A informação transmitida inclui:
Referências de velocidade
Ordens de arranque ou paragem
Definições iniciais de controlo ou
modificações dessas definições durante o
funcionamento.
O estado do controlador (run, stop,
sobrecarga, falha)
Alarmes
O estado do motor (velocidade, binário,
corrente, temperatura).
Estas opções de diálogo são também
utilizadas em ligação com PCs de modo a
simplificar os parâmetros de arranque
(download) ou para guardar parâmetros de
arranque.
Opção de ligação a sensores térmicos
PTC integrados no motor
Salto da frequência de ressonância da
máquina, evitando o funcionamento a essa
frequência.
Bloqueio com atraso programado do
controlador a velocidades reduzidas nas
aplicações de bombagem onde o fluido é
usado para lubrificar a bomba.
Estas funções são cada vez mais
integradas de fábrica em controladores
sofisticados. (ver Fig. 27).
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
30/31
6.3 Cartas opcionais
Os fabricantes disponibilizam cartas
opcionais para aplicações mais complexas,
que podem ser utilizadas seja para
funções especiais, por exemplo no controlo
vectorial de fluxo com sensor, seja para
aplicações específicas.
Cartas “Multi-motor”
Cartas “Multi-parâmetros”, que podem ser
usados para a comutação automática de
parâmetros de regulação.
Cartas especiais desenvolvidas para uma
dada necessidade do utilizador.
Estes tipos de cartas incluem:
Alguns fabricantes também oferecem cartas
PLC para inserir no controlador, para uso em
aplicações simples.
Isso disponibiliza ao operador instruções de
programação, entradas e saídas para
parametrização de pequenos sistemas
automáticos onde se não justifica a presença de
um PLC separado
Cartas para “Estações de bombagem”
como meio de baixos custos para
parametrizar uma estação de bombagem
constituída por um único controlador que
fornece energia a vários motores em
cadeia.
7 Conclusão
Como a selecção de um variador de
velocidade está fortemente ligada ao tipo
de carga e aos níveis de performance
desejados, a selecção de qualquer
variador de velocidade deve incluir uma
análise das necessidades de
funcionamento do equipamento e dos
níveis de performance do próprio motor.
Binário constante, binário variável,
potência constante, controlo vectorial de
fluxo, controlador bidireccional, etc. são
termos frequentes na documentação de
fabricante.
Essencialmente, trata-se de todos os
dados que vai precisar de forma a
identificar o controlador mais adequado.
A escolha errada do controlador pode
resultar num funcionamento pouco eficaz.
De igual modo, é essencial considerara
gama de velocidades desejadas de modo
a seleccionar a combinação
motor/controlador mais adequada.
Caderno Técnico Schneider Electric no. 208 autor D. Clenet /tradução Ludgero Leote
31/31